
3D Rock Structure Digital Characterization Using Airborne LiDAR and Unmanned Aerial Vehicle Techniques for Stability Analysis of a Blocky Rock Mass Slope


Abstract
:
1. Introduction
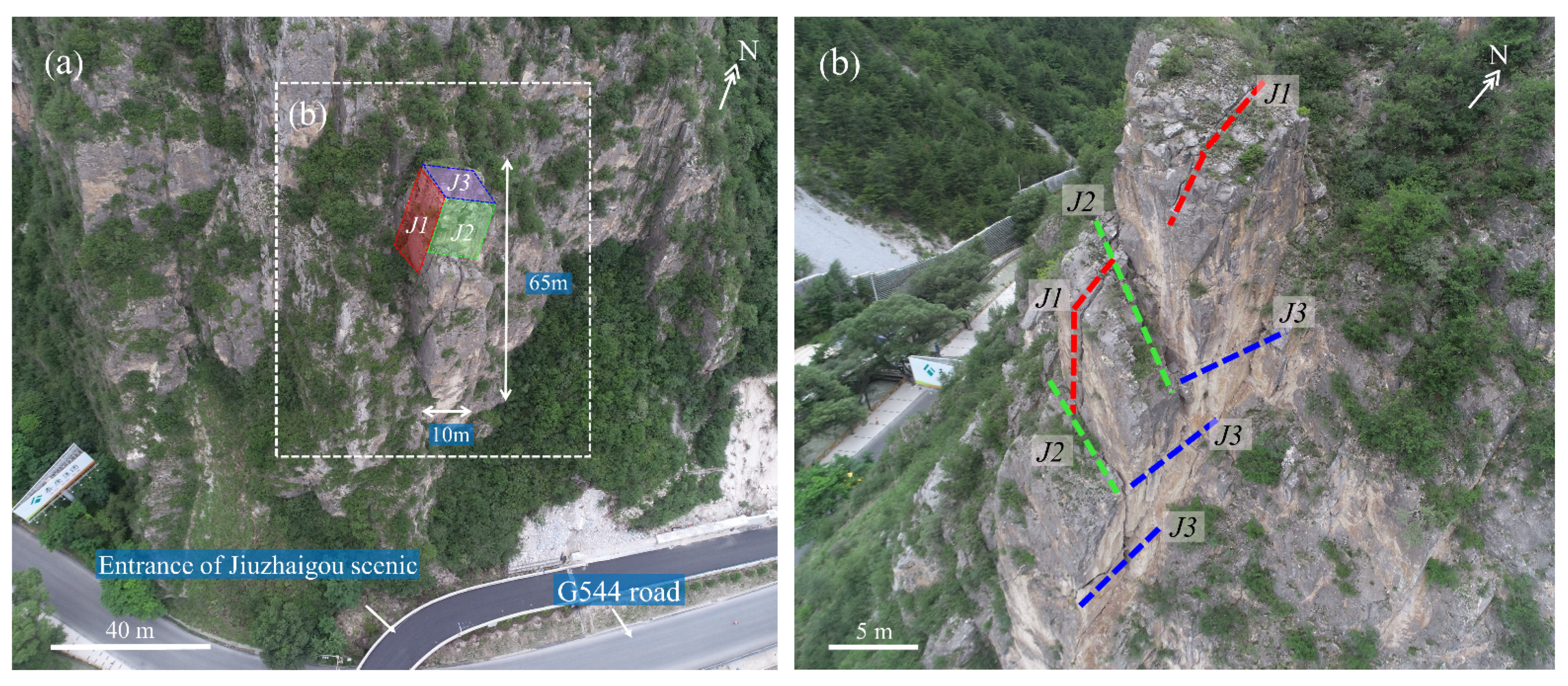
2. Study Site Description
3. Data and Methods
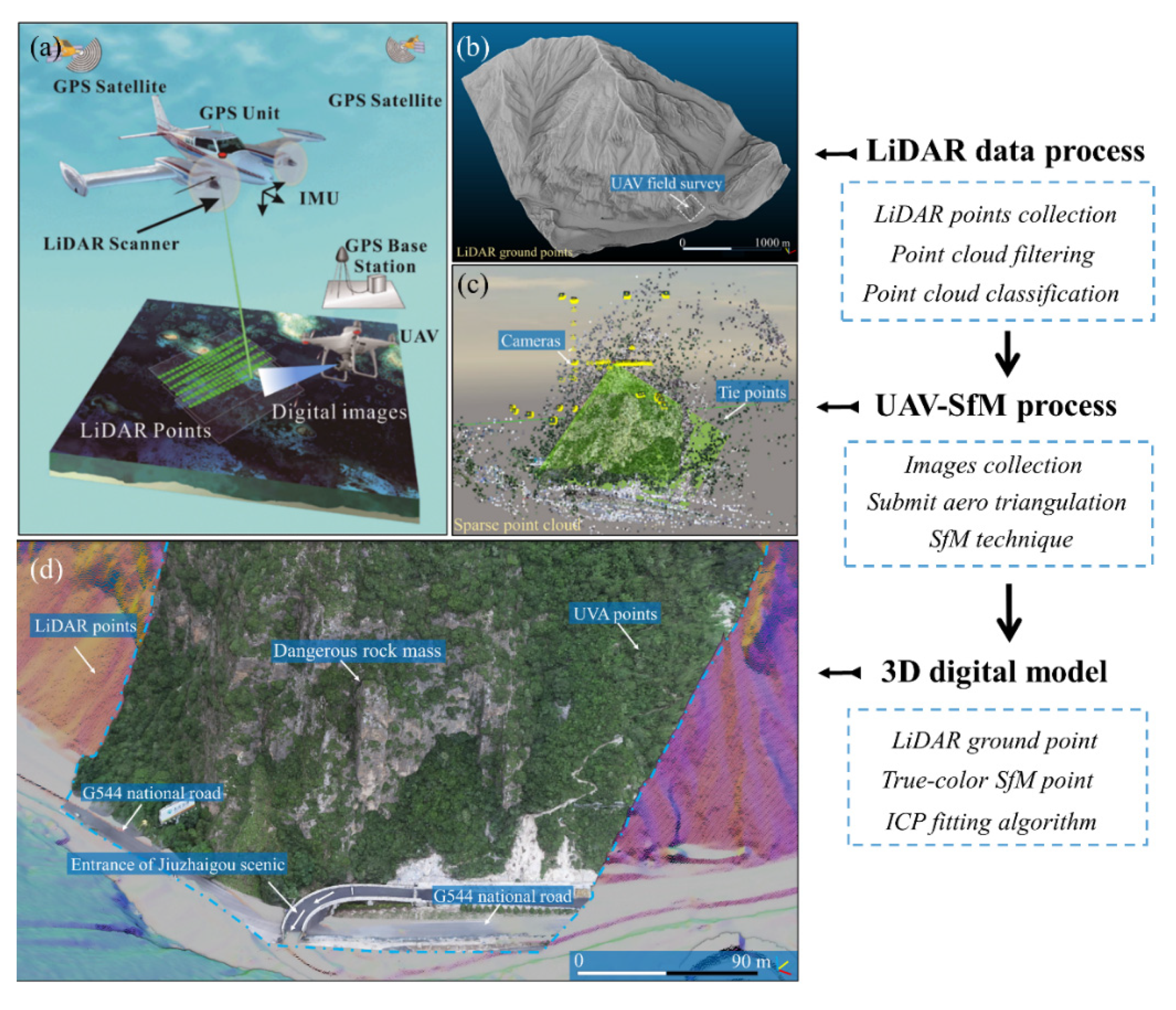
3.1. 3D Point Cloud Acquisition and Processing
3.2. Airborne LiDAR Data
3.3. UAV-SfM Data
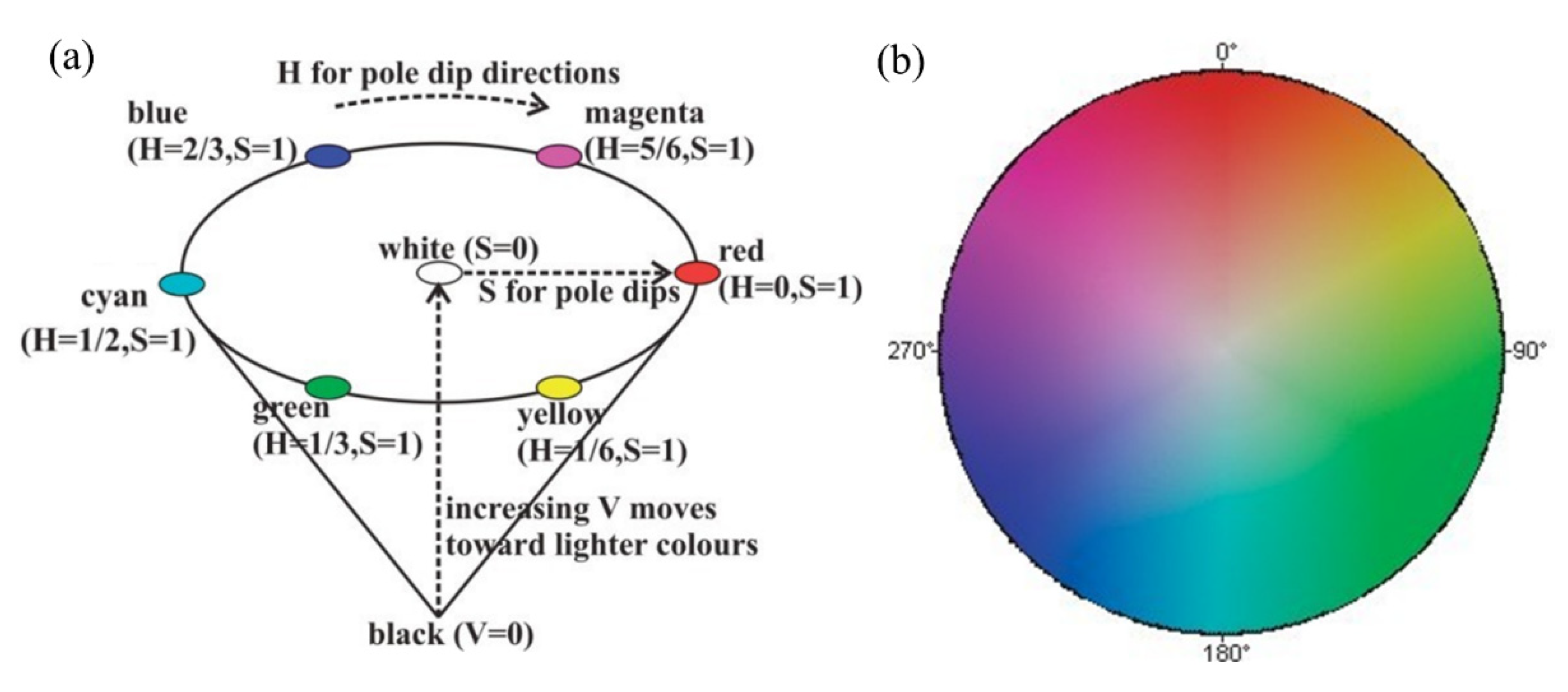
3.4. Extraction of Rock Structure from Point Clouds
4. Results
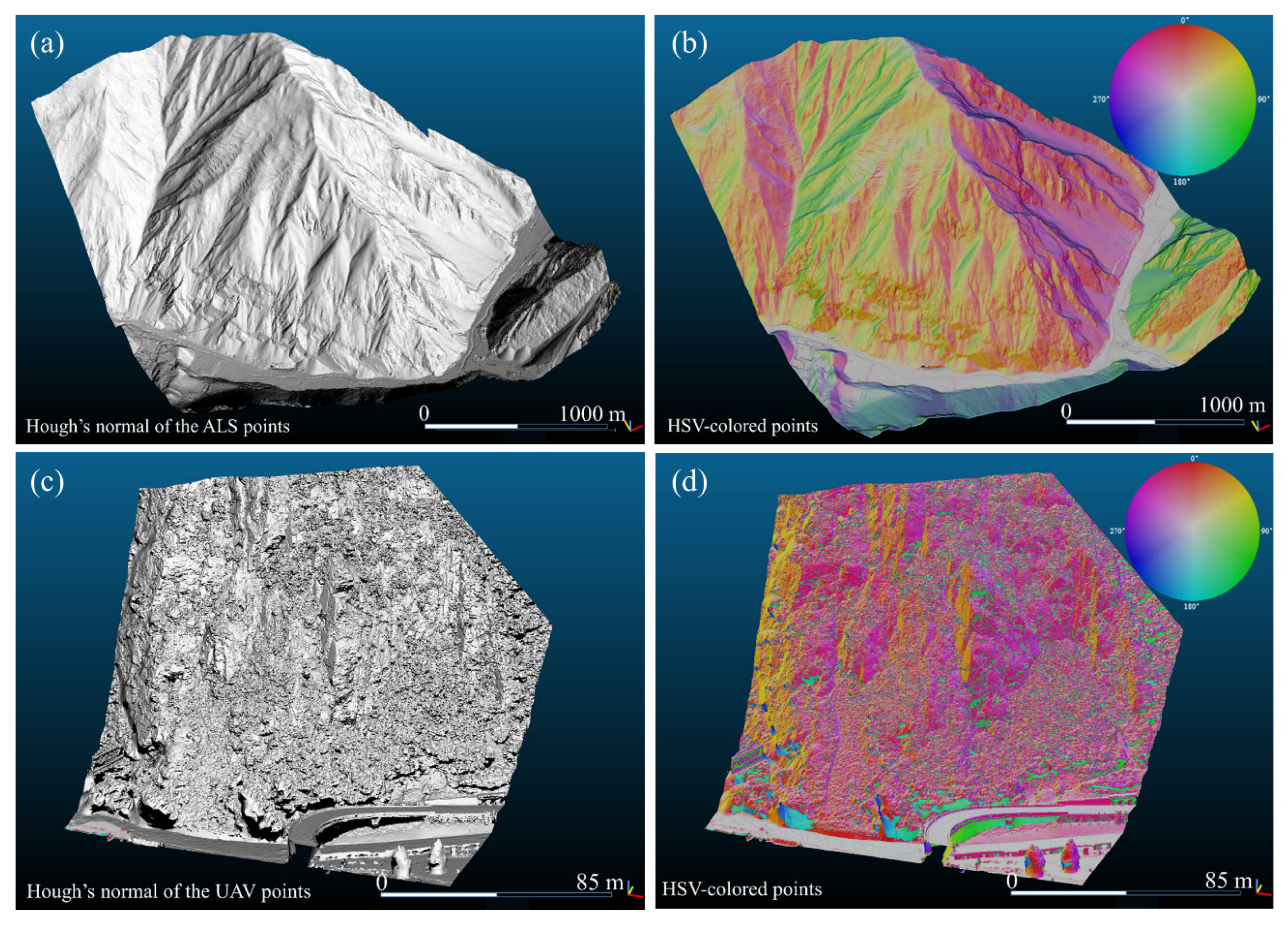
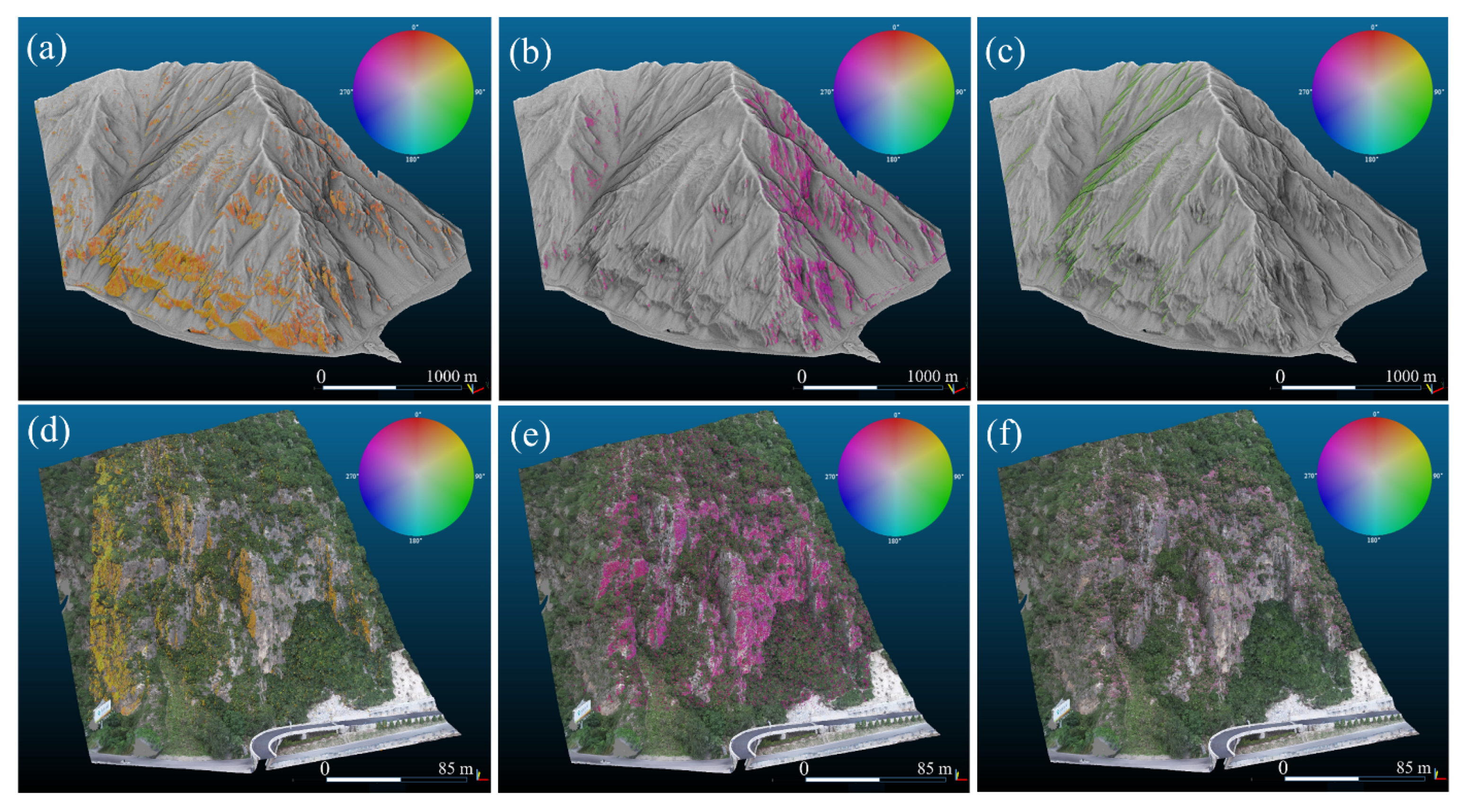
4.1. Extraction of the Set-Based Points
4.2. Discontinuity Orientations
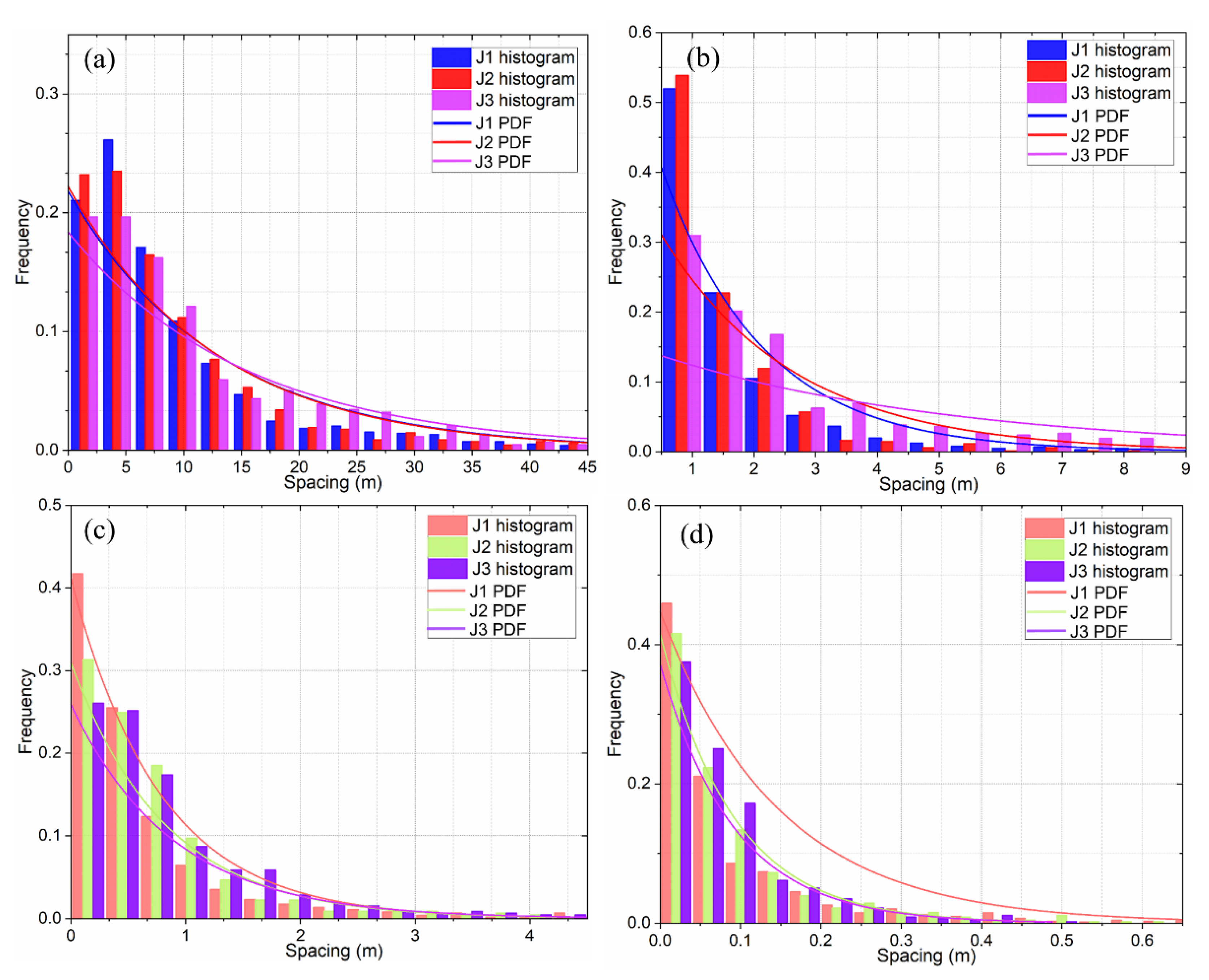
4.3. Spacing of Joint Sets
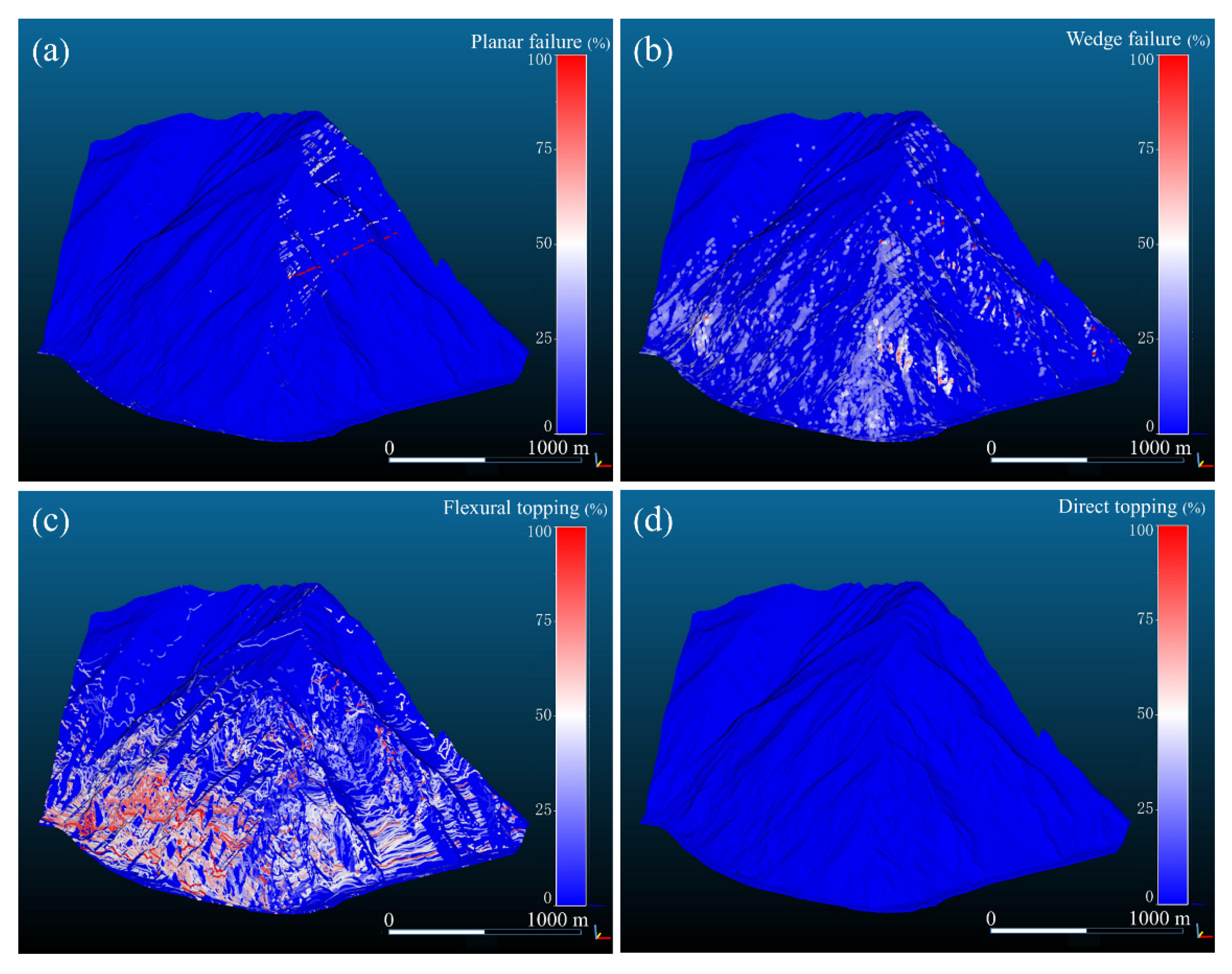
4.4. Kinematic Analysis
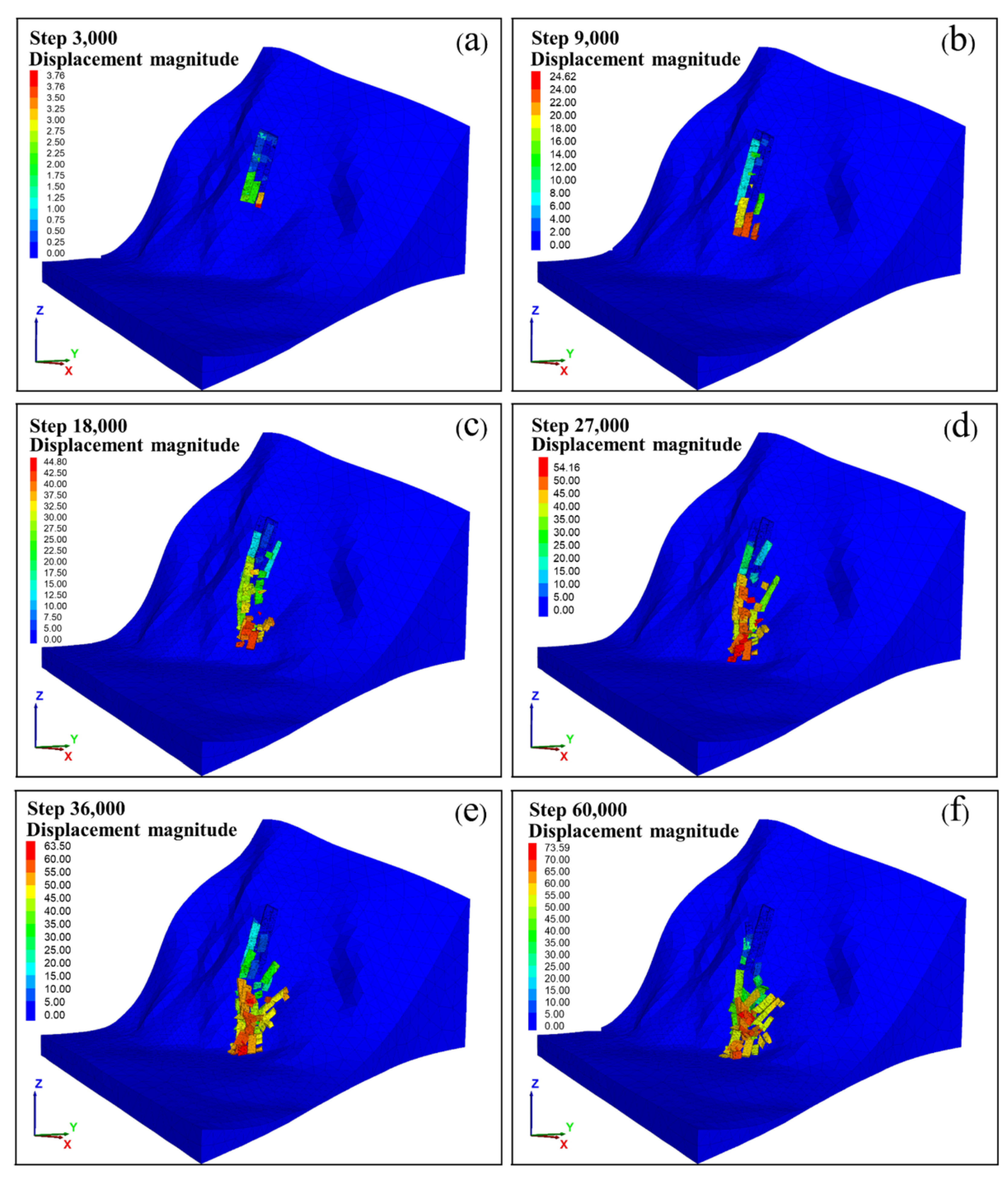
4.5. Distinct Element Modelling
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Goodman, R.E. Methods of Geological Engineering in Discontinuous Rocks; West Pub. Co.: St. Paul, MN, USA, 1976; ISBN 0829900667. [Google Scholar]
- Priest, S.D.; Hudson, J.A. Discontinuity Spacings in Rock. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1976, 13, 135–148. [Google Scholar] [CrossRef]
- Rosser, N.J.; Petley, D.N.; Lim, M.; Dunning, S.A.; Allison, R.J. Terrestrial laser scanning for monitoring the process of hard rock coastal cliff erosion. Q. J. Eng. Geol. Hydrogeol. 2005, 38, 363–375. [Google Scholar] [CrossRef]
- Oppikofer, T.; Jaboyedoff, M.; Blikra, L.; Derron, M.H.; Metzger, R. Characterization and monitoring of the Åknes rockslide using terrestrial laser scanning. Nat. Hazards Earth Syst. Sci. 2009, 9, 1003–1019. [Google Scholar] [CrossRef] [Green Version]
- Viero, A.; Teza, G.; Massironi, M.; Jaboyedoff, M.; Galgaro, A. Laser scanning-based recognition of rotational movements on a deep seated gravitational instability: The Cinque Torri case (North-Eastern Italian Alps). Geomorphology 2010, 122, 191–204. [Google Scholar] [CrossRef]
- Riquelme, A.; Cano, M.; Tomás, R.; Abellán, A. Identification of Rock Slope Discontinuity Sets from Laser Scanner and Photogrammetric Point Clouds: A Comparative Analysis. Procedia Eng. 2017, 191, 838–845. [Google Scholar] [CrossRef]
- Ford, D.C.; Williams, P. Karst Hydrogeology and Geomorphology; Wiley: Hoboken, NJ, USA, 2013; pp. 1–562. [Google Scholar]
- Gutiérrez, F.; Parise, M.; De Waele, J.; Jourde, H. A review on natural and human-induced geohazards and impacts in karst. Earth-Sci. Rev. 2014, 138, 61–88. [Google Scholar] [CrossRef]
- Sauro, U. Dolines and Sinkholes: Aspects of Evolution and Problems of Classification. Acta Carsologica 2016, 32, 41–52. [Google Scholar] [CrossRef] [Green Version]
- Waltham, T. The engineering classification of karst with respect to the role and influence of caves. Int. J. Speleol. 2002, 31, 19–35. [Google Scholar] [CrossRef] [Green Version]
- Palmer, A.N. Cave geology and speleogenesis over the past 65 years: Role of The National Speleological Society in advancing the science. J. Cave Karst Stud. 2007, 69, 3–12. [Google Scholar]
- Parise, M.; Closson, D.; Gutiérrez, F.; Stevanović, Z. Anticipating and managing engineering problems in the complex karst environment. Environ. Earth Sci. 2015, 74, 7823–7835. [Google Scholar] [CrossRef]
- Andriani, G.F.; Parise, M. Applying rock mass classifications to carbonate rocks for engineering purposes with a new approach using the rock engineering system. J. Rock Mech. Geotech. Eng. 2017, 9, 364–369. [Google Scholar] [CrossRef]
- Andriani, G.F.; Parise, M. On the applicability of geomechanical models for carbonate rock masses interested by karst processes. Environ. Earth Sci. 2015, 74, 7813–7821. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Abellán, A.; Carrea, D.; Derron, M.-H.; Matasci, B.; Michoud, C. Mapping and Monitoring of Landslides Using LIDAR. In Natural Hazards; CRC Press: Boca Raton, FL, USA, 2018; pp. 397–420. [Google Scholar]
- Gigli, G.; Morelli, S.; Fornera, S.; Casagli, N. Terrestrial laser scanner and geomechanical surveys for the rapid evaluation of rock fall susceptibility scenarios. Landslides 2014, 11, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Menegoni, N.; Giordan, D.; Perotti, C.; Tannant, D.D. Detection and geometric characterization of rock mass discontinuities using a 3D high-resolution digital outcrop model generated from RPAS imagery—Ormea rock slope, Italy. Eng. Geol. 2019, 252, 145–163. [Google Scholar] [CrossRef]
- Loiotine, L.; Andriani, G.F.; Jaboyedoff, M.; Parise, M.; Derron, M.H. Comparison of remote sensing techniques for geostructural analysis and cliff monitoring in coastal areas of high tourist attraction: The case study of polignano a mare (southern Italy). Remote Sens. 2021, 13, 5045. [Google Scholar] [CrossRef]
- Battulwar, R.; Zare-Naghadehi, M.; Emami, E.; Sattarvand, J. A state-of-the-art review of automated extraction of rock mass discontinuity characteristics using three-dimensional surface models. J. Rock Mech. Geotech. Eng. 2021, 13, 920–936. [Google Scholar] [CrossRef]
- Marino, P.; Peres, D.J.; Cancelliere, A.; Greco, R.; Bogaard, T.A. Soil moisture information can improve shallow landslide forecasting using the hydrometeorological threshold approach. Landslides 2020, 17, 2041–2054. [Google Scholar] [CrossRef]
- Marino, P.; Comegna, L.; Damiano, E.; Olivares, L.; Greco, R. Monitoring the hydrological balance of a landslide-prone slope covered by pyroclastic deposits over limestone fractured bedrock. Water 2020, 12, 3309. [Google Scholar] [CrossRef]
- Brideau, M.A.; Sturzenegger, M.; Stead, D.; Jaboyedoff, M.; Lawrence, M.; Roberts, N.; Ward, B.; Millard, T.; Clague, J. Stability analysis of the 2007 Chehalis lake landslide based on long-range terrestrial photogrammetry and airborne LiDAR data. Landslides 2012, 9, 75–91. [Google Scholar] [CrossRef]
- Brideau, M.A.; Pedrazzini, A.; Stead, D.; Froese, C.; Jaboyedoff, M.; van Zeyl, D. Three-dimensional slope stability analysis of South Peak, Crowsnest Pass, Alberta, Canada. Landslides 2011, 8, 139–158. [Google Scholar] [CrossRef]
- Guzzetti, F.; Reichenbach, P.; Wieczorek, G.F. Rockfall hazard and risk assessment in the Yosemite Valley, California, USA. Nat. Hazards Earth Syst. Sci. 2003, 3, 491–503. [Google Scholar] [CrossRef] [Green Version]
- Vöge, M.; Lato, M.J.; Diederichs, M.S. Automated rockmass discontinuity mapping from 3-dimensional surface data. Eng. Geol. 2013, 164, 155–162. [Google Scholar] [CrossRef]
- Liu, Q.; Kieffer, D.S. Virtual outcrop modeling for 3D characterization of engineering rock masses. In Proceedings of the 45th US Rock Mechanics/Geomechanics Symposium, San Francisco, CA, USA, 26–29 June 2011. [Google Scholar]
- Sturzenegger, M.; Stead, D. Quantifying discontinuity orientation and persistence on high mountain rock slopes and large landslides using terrestrial remote sensing techniques. Nat. Hazards Earth Syst. Sci. 2009, 9, 267–287. [Google Scholar] [CrossRef]
- Riquelme, A.J.; Abellán, A.; Tomás, R.; Jaboyedoff, M. A new approach for semi-automatic rock mass joints recognition from 3D point clouds. Comput. Geosci. 2014, 68, 38–52. [Google Scholar] [CrossRef] [Green Version]
- Riquelme, A.J.; Tomás, R.; Abellán, A. Characterization of rock slopes through slope mass rating using 3D point clouds. Int. J. Rock Mech. Min. Sci. 2016, 84, 165–176. [Google Scholar] [CrossRef] [Green Version]
- Gigli, G.; Casagli, N. Semi-automatic extraction of rock mass structural data from high resolution LIDAR point clouds. Int. J. Rock Mech. Min. Sci. 2011, 48, 187–198. [Google Scholar] [CrossRef]
- Drews, T.; Miernik, G.; Anders, K.; Höfle, B.; Profe, J.; Emmerich, A.; Bechstädt, T. Validation of fracture data recognition in rock masses by automated plane detection in 3D point clouds. Int. J. Rock Mech. Min. Sci. 2018, 109, 19–31. [Google Scholar] [CrossRef]
- Del, G.O.; Oggeri, C. Reinforcement design and control of rock slopes above tunnel portals in northern Italy. Int. J. Rock Mech. Min. Sci. 2004, 41, 786–791. [Google Scholar]
- Riquelme, A.J.; Abellán, A.; Tomás, R. Discontinuity spacing analysis in rock masses using 3D point clouds. Eng. Geol. 2015, 195, 185–195. [Google Scholar] [CrossRef] [Green Version]
- Ling, S.; Sun, C.; Li, X.; Ren, Y.; Xu, J.; Huang, T. Characterizing the distribution pattern and geologic and geomorphic controls on earthquake-triggered landslide occurrence during the 2017 Ms 7.0 Jiuzhaigou earthquake, Sichuan, China. Landslides 2021, 18, 1275–1291. [Google Scholar] [CrossRef]
- Fan, X.; Scaringi, G.; Xu, Q.; Zhan, W.; Dai, L.; Li, Y.; Pei, X.; Yang, Q.; Huang, R. Coseismic landslides triggered by the 8th August 2017 M s 7.0 Jiuzhaigou earthquake (Sichuan, China): Factors controlling their spatial distribution and implications for the seismogenic blind fault identification. Landslides 2018, 15, 967–983. [Google Scholar] [CrossRef]
- Yu, H.; Yu, C.; Ma, Z.; Zhang, X.; Zhang, H.; Yao, Q.; Zhu, Q. Temporal and Spatial Evolution of Load/Unload Response Ratio Before the M7.0 Jiuzhaigou Earthquake of Aug. 8, 2017 in Sichuan Province. Pure Appl. Geophys. 2020, 177, 321–331. [Google Scholar] [CrossRef]
- Xu, K.; Li, Y.; Zeng, W.; Pu, J. Dynamic background of the 2017 Ms7.0 Jiuzhaigou (China) earthquake. Arab. J. Geosci. 2021, 14, 1193. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modeling by registration of multiple range images. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 2724–2729. [Google Scholar]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Dong, X.; Xu, Q.; Huang, R.; Liu, Q.; Kieffer, D.S. Reconstruction of Surficial Rock Blocks by Means of Rock Structure Modelling of 3D TLS Point Clouds: The 2013 Long-Chang Rockfall. Rock Mech. Rock Eng. 2020, 53, 671–689. [Google Scholar] [CrossRef] [Green Version]
- Jaboyedoff, M.; Couture, R.; Locat, P. Structural analysis of Turtle Mountain (Alberta) using digital elevation model: Toward a progressive failure. Geomorphology 2009, 103, 5–16. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Metzger, R.; Oppikofer, T.; Couture, R.; Derron, M.H.; Locat, J.; Turmel, D. New insight techniques to analyze rock-slope relief using DEM and 3D-imaging cloud points: COLTOP-3D software. In Proceedings of the 1st Canada-US Rock Mechanics Symposium—Rock Mechanics Meeting Society’s Challenges and Demands, Vancouver, BC, Canada, 27–31 May 2007; Volume 1, pp. 61–68. [Google Scholar]
- Liu, Q.; Kaufmann, V. Integrated assessment of cliff rockfall hazards by means of rock structure modelling applied to TLS data: New developments. In Proceedings of the ISRM Regional Symposium, EUROCK 2015, Salzburg, Austria, 7–10 October 2015. [Google Scholar]
- Danzl, P.; Gamper, T.; Liu, Q.; Kieffer, D.S. Photogrammetric reconstruction of rock outcrops using open source software. In Proceedings of the ISRM International Symposium—EUROCK 2020, Trondheim, Norway, 14–19 June 2020. [Google Scholar]
- Hornik, K.; Feinerer, I.; Kober, M.; Buchta, C. Spherical k-Means Clustering. J. Stat. Softw. 2012, 50, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Assali, P.; Grussenmeyer, P.; Villemin, T.; Pollet, N.; Viguier, F. Surveying and modeling of rock discontinuities by terrestrial laser scanning and photogrammetry: Semi-automatic approaches for linear outcrop inspection. J. Struct. Geol. 2014, 66, 102–114. [Google Scholar] [CrossRef]
- Rousseeuw, P.J. Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Scheidegger, A.E. On the statistics of the orientation of bedding planes, grain axes, and similar sedimentological data. US Geol. Surv. Prof. Pap. 1965, 525, 164–167. [Google Scholar]
- Menegoni, N.; Giordan, D.; Perotti, C. An open-source algorithm for 3D rock slope kinematic analysis (ROKA). Appl. Sci. 2021, 11, 1698. [Google Scholar] [CrossRef]
- Hoek, E.; Bray, J.W. Rock Slope Engineering Institution of Mining and Metallurgy; Spon Press: London, UK, 1981. [Google Scholar]
- Barton, N.; Choubey, V. The shear strength of rock joints in theory and practice. Rock Mech. Felsmech. Mécanique Des Roches 1977, 10, 1–54. [Google Scholar] [CrossRef]
- Barton, N.; Lien, R.; Lunde, J. Engineering classification of rock masses for the design of tunnel support. Rock Mech. Felsmech. Mécanique Des Roches 1974, 6, 189–236. [Google Scholar] [CrossRef]
- Tuckey, Z.; Stead, D. Improvements to field and remote sensing methods for mapping discontinuity persistence and intact rock bridges in rock slopes. Eng. Geol. 2016, 208, 136–153. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ALS system | Flying platform | AS350 helicopter |
| LiDAR type | ALS80-HP (Leica) | |
| Pulse frequency | 50–1000 kHz | |
| Scanning angle | 0–72° | |
| Scanning method | Linear | |
| UAV (DJI Phantom 4 RTK) | Weight | 1391 g |
| Dimension | 289.5 × 289.5 × 213 mm | |
| GNSS mode | GPS/BDS/Galileo | |
| Sensor type | FC6310 (1″ CMOS) | |
| Sensor size | FOV 84° 8.8 mm/24 mm |
| Photo Position Uncertainties | Tie Point Position Uncertainties | Tie Point Resolution | Reprojection Errors per Tie Point | |||
|---|---|---|---|---|---|---|
| X (m) | Y (m) | Z (m) | (m) | (m/pixel) | (pixels) | |
| Mean | 0.00332 | 0.00409 | 0.00044 | 0.12131 | 0.02119 | 0.49 |
| Minimum | 0.00059 | 0.00043 | 0.00312 | 0.00142 | 0.00383 | 0.01 |
| Maximum | 0.06873 | 0.11417 | 0.04736 | 4.09669 | 0.18652 | 1.90 |
| Neighbourhood Size | Number of Planes | Accumulator Steps | Number of Rotations | Tolerance Angle | Neighbourhood Size for Density Estimation |
|---|---|---|---|---|---|
| 10 | 1000 | 15 | 5 | 90° | 5 |
| Acquisition Technique | Joint Set | Mean Dip (°) | Mean Dip Direction (°) | Fisher’s K | Mean Spacing, Non-Persistent (m) | Mean Spacing, Fully Persistent (m) |
|---|---|---|---|---|---|---|
| ALS | J1 | 59 | 211 | 49.5 | 13.42 | 1.66 |
| J2 | 57 | 136 | 54.3 | 14.04 | 2.17 | |
| J3 | 43 | 285 | 44.6 | 15.37 | 4.88 | |
| UAV | J1 | 73 | 218 | 71.4 | 0.78 | 0.08 |
| J2 | 76 | 138 | 30.1 | 0.82 | 0.10 | |
| J3 | 38 | 133 | 24.5 | 0.89 | 0.10 |
| Material Property | |
| Density (kg/m3) | 2700 |
| Constitutive model | Rigid blocks |
| Discontinuity properties | |
| Friction angle (°) | 30 |
| Cohesion (MPa) | 0 |
| Tensile strength (MPa) | 0 |
| Shear stiffness (GPa/m) | 1 |
| Normal stiffness (GPa/m) | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Q.; Ye, Z.; Liu, Q.; Dong, X.; Li, W.; Fang, S.; Guo, C. 3D Rock Structure Digital Characterization Using Airborne LiDAR and Unmanned Aerial Vehicle Techniques for Stability Analysis of a Blocky Rock Mass Slope. Remote Sens. 2022, 14, 3044. https://doi.org/10.3390/rs14133044
Xu Q, Ye Z, Liu Q, Dong X, Li W, Fang S, Guo C. 3D Rock Structure Digital Characterization Using Airborne LiDAR and Unmanned Aerial Vehicle Techniques for Stability Analysis of a Blocky Rock Mass Slope. Remote Sensing. 2022; 14(13):3044. https://doi.org/10.3390/rs14133044
Chicago/Turabian StyleXu, Qiang, Zhen Ye, Qian Liu, Xiujun Dong, Weile Li, Shanao Fang, and Chen Guo. 2022. "3D Rock Structure Digital Characterization Using Airborne LiDAR and Unmanned Aerial Vehicle Techniques for Stability Analysis of a Blocky Rock Mass Slope" Remote Sensing 14, no. 13: 3044. https://doi.org/10.3390/rs14133044
APA StyleXu, Q., Ye, Z., Liu, Q., Dong, X., Li, W., Fang, S., & Guo, C. (2022). 3D Rock Structure Digital Characterization Using Airborne LiDAR and Unmanned Aerial Vehicle Techniques for Stability Analysis of a Blocky Rock Mass Slope. Remote Sensing, 14(13), 3044. https://doi.org/10.3390/rs14133044