
Geolocation Assessment and Optimization for OMPS Nadir Mapper: Methodology



 ,
,
Abstract
:1. Introduction
2. Instruments and Datasets
2.1. OMPS-NM
2.2. VIIRS
3. Nature of OMPS-NM Geolocation Assessment
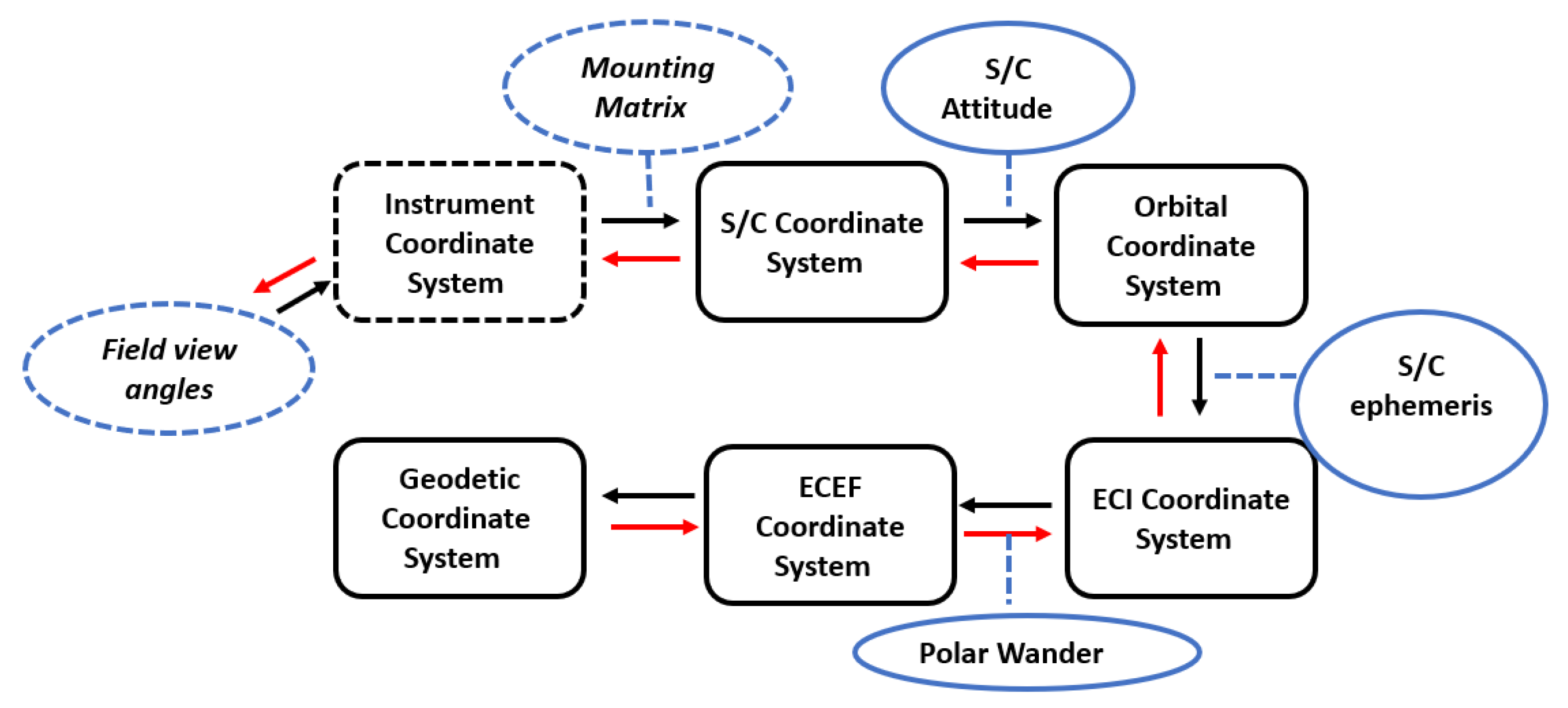
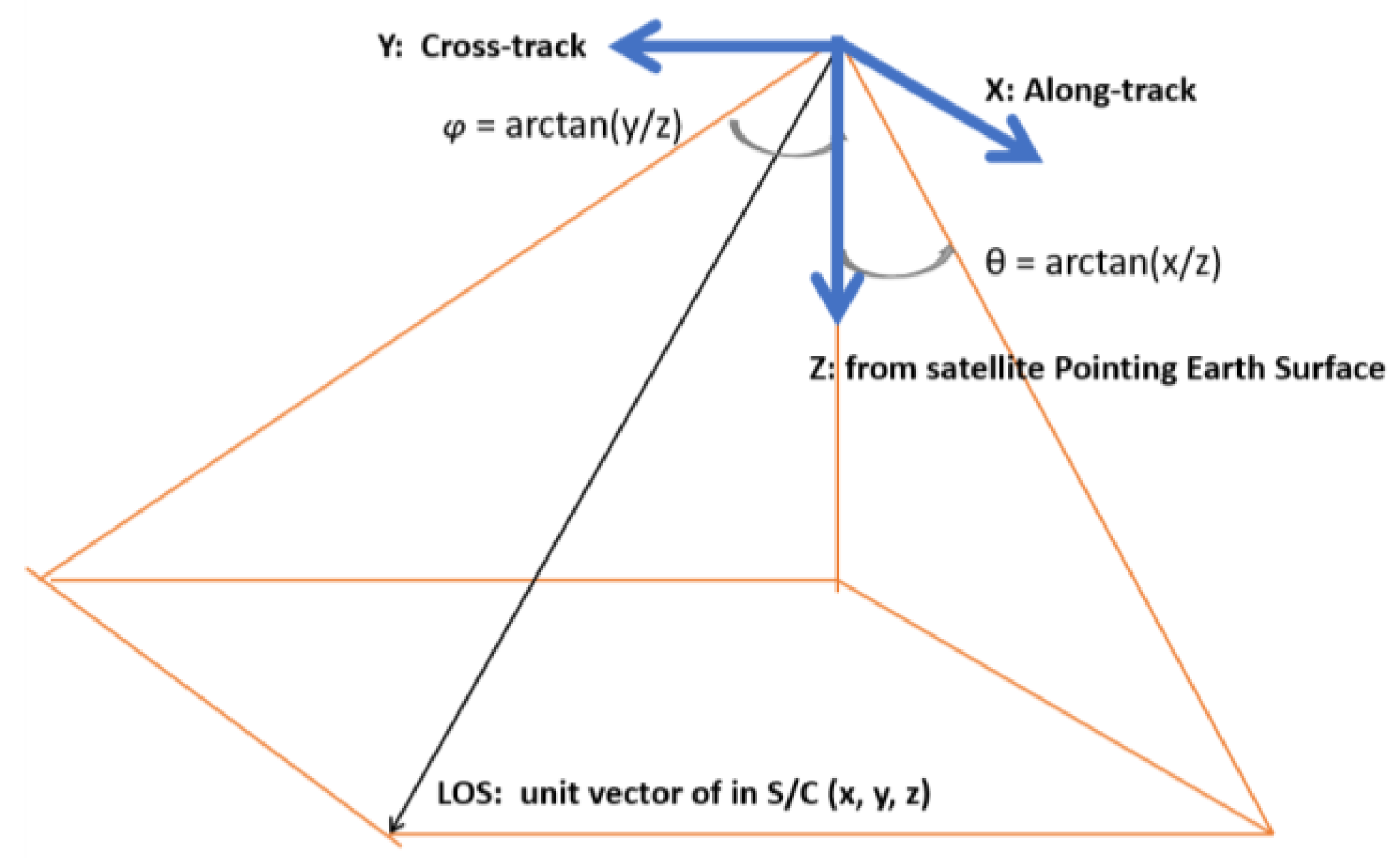
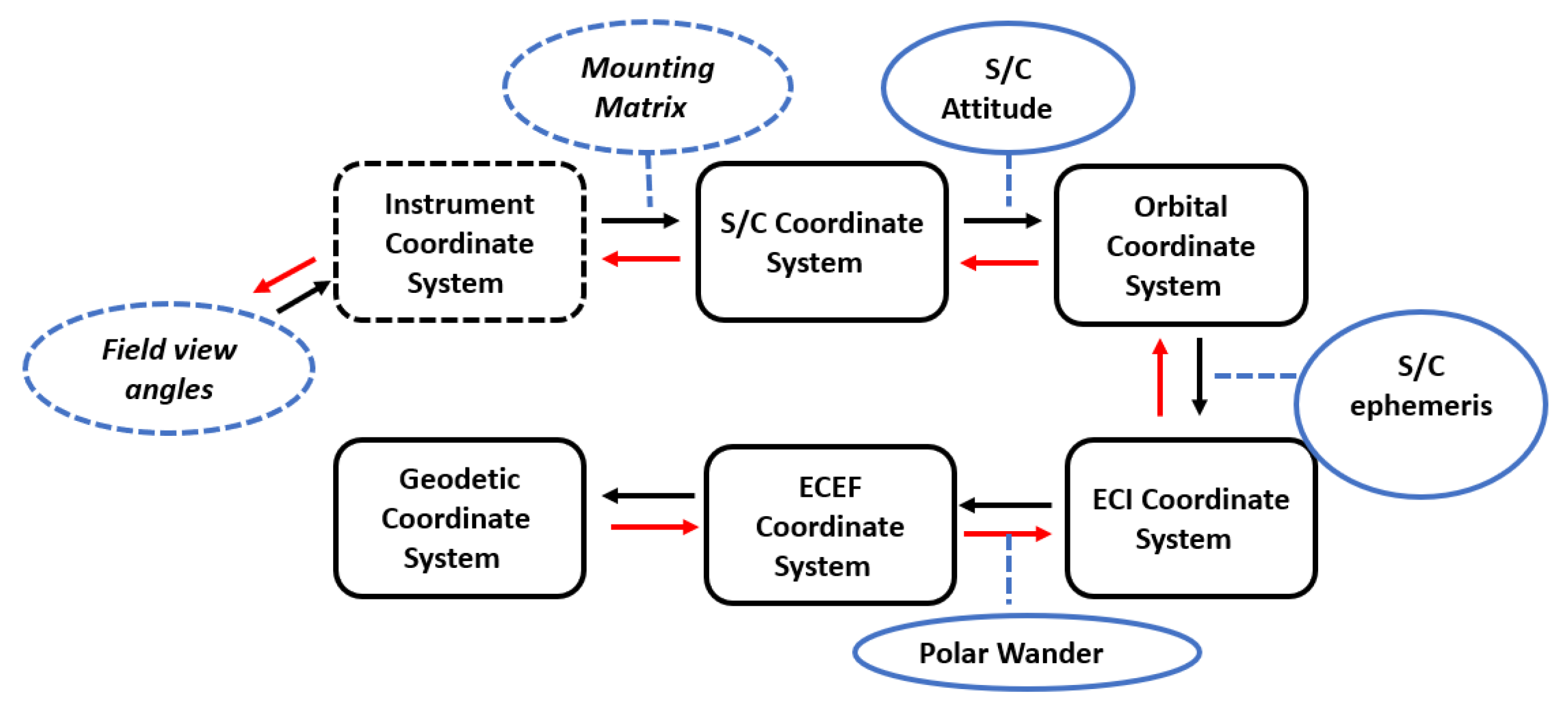
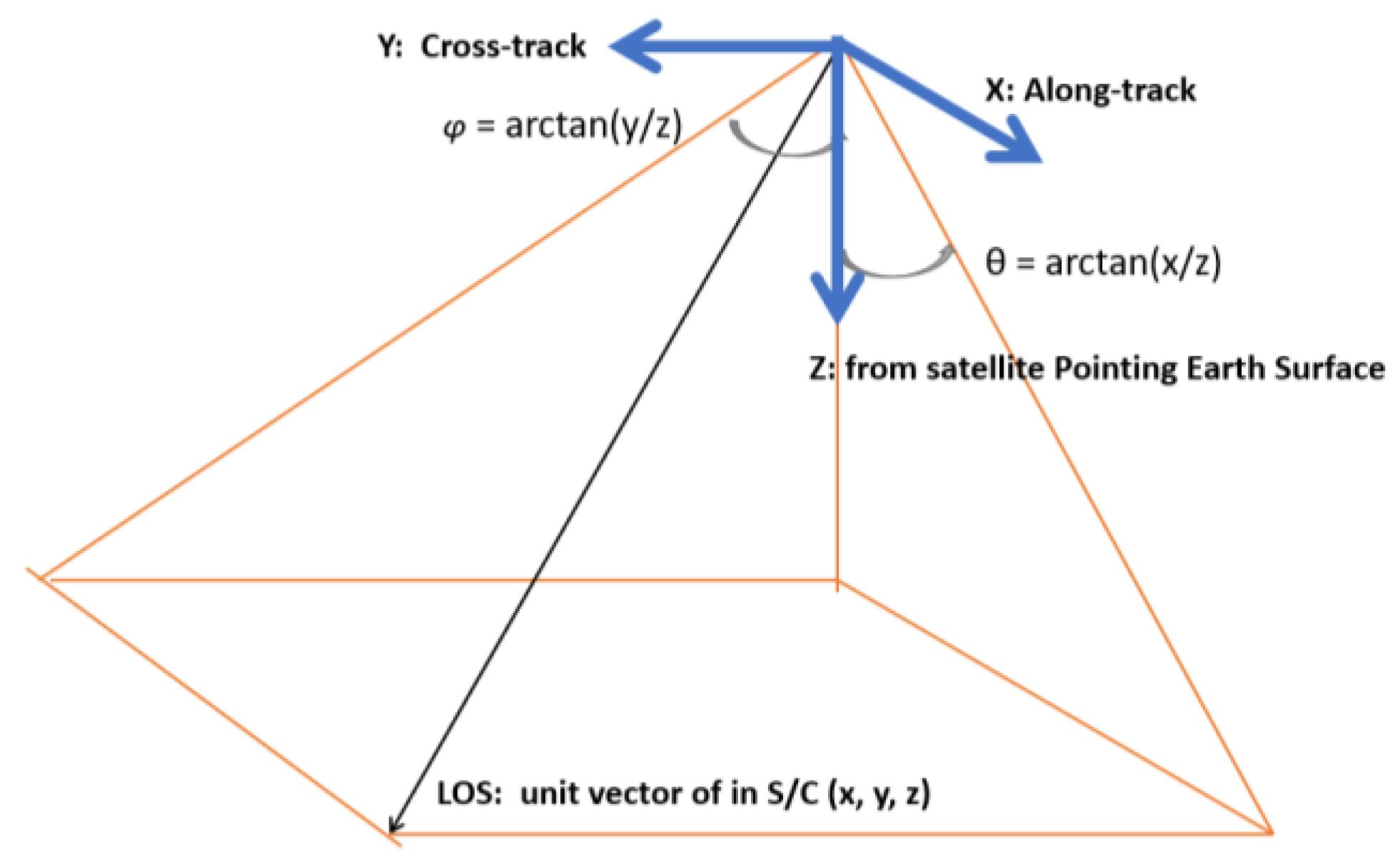
3.1. OMPS-NM Geolocation Algorithm Overview
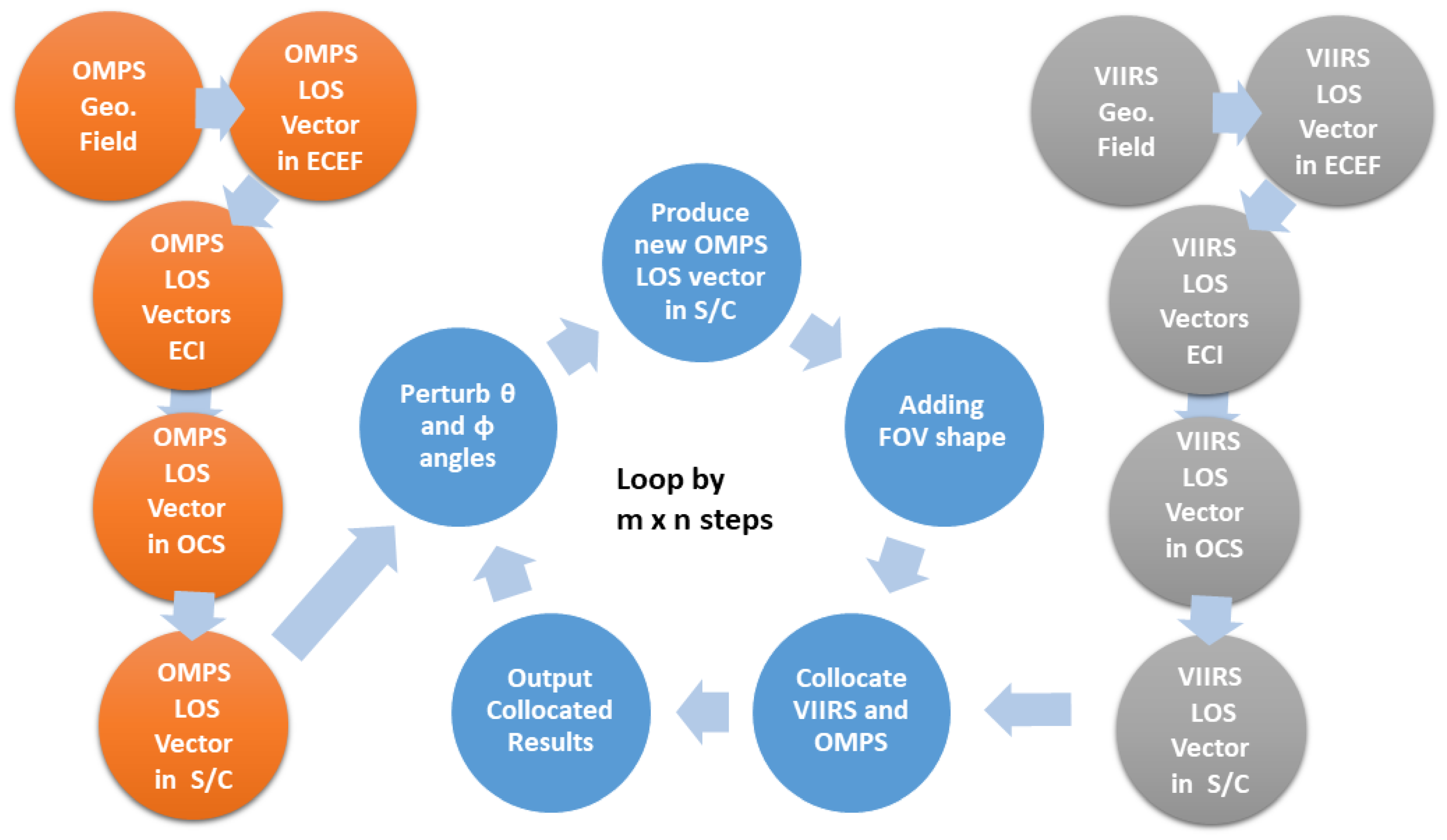
- (1)
- Using the spacecraft attitude to transform the LOS vector from the spacecraft coordinate to the orbital coordinate;
- (2)
- Transforming the LOS vector from the orbital coordinate to the Earth-centered inertial (ECI) coordinate systems based on the spacecraft’s ephemeris data (ECI position and velocity);
- (3)
- Converting the LOS vector from ECI to the Earth-centered Earth-fixed (ECEF) coordinate;
- (4)
- Outputting geodetic latitude and longitude through the Earth ellipsoid intersection algorithm; and
- (5)
- Computing other geolocation products, such as solar and sensor azimuth and zenith angles, as well as the sensor range (from satellite to macropixel FOV position).
3.2. Geolocation Uncertainty
4. Methods for Geolocation Accuracy Assessment
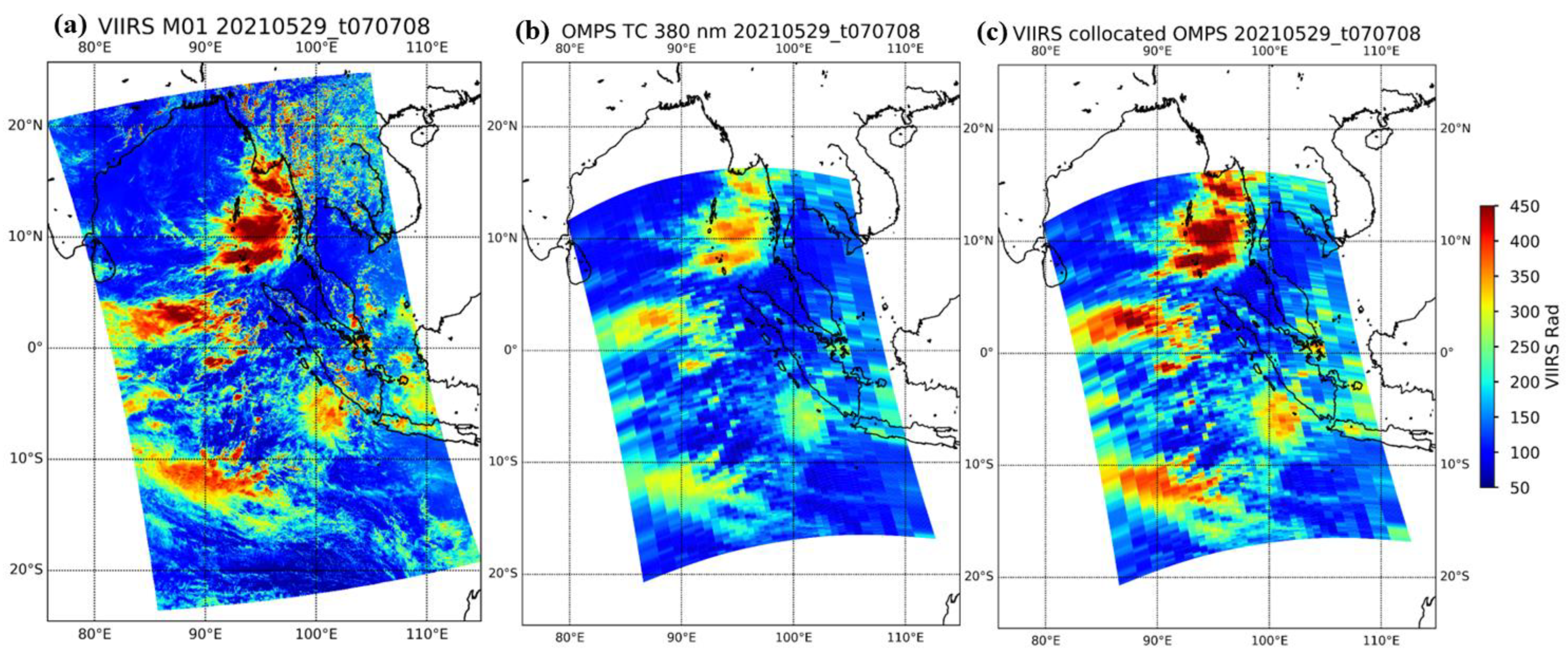
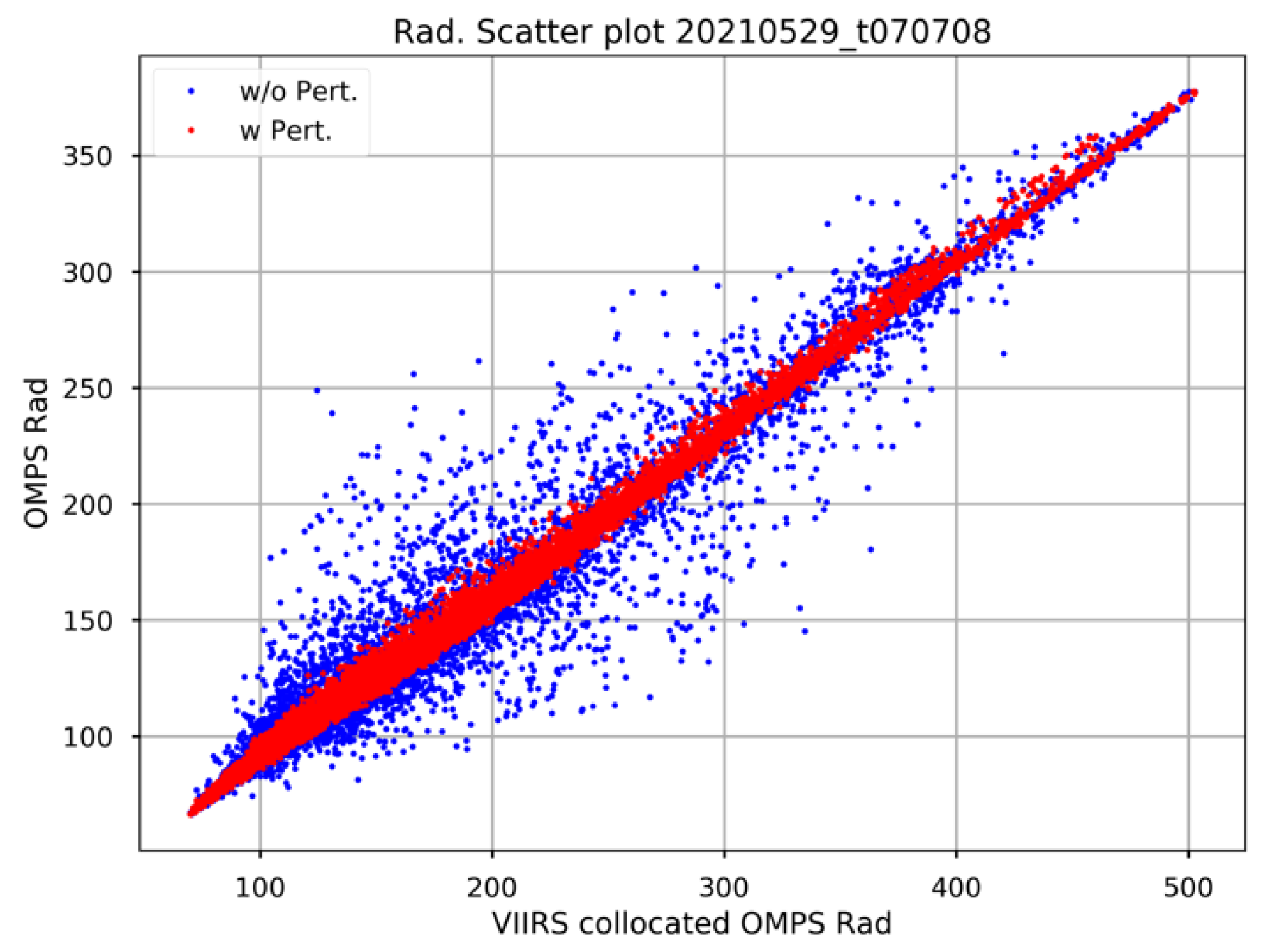
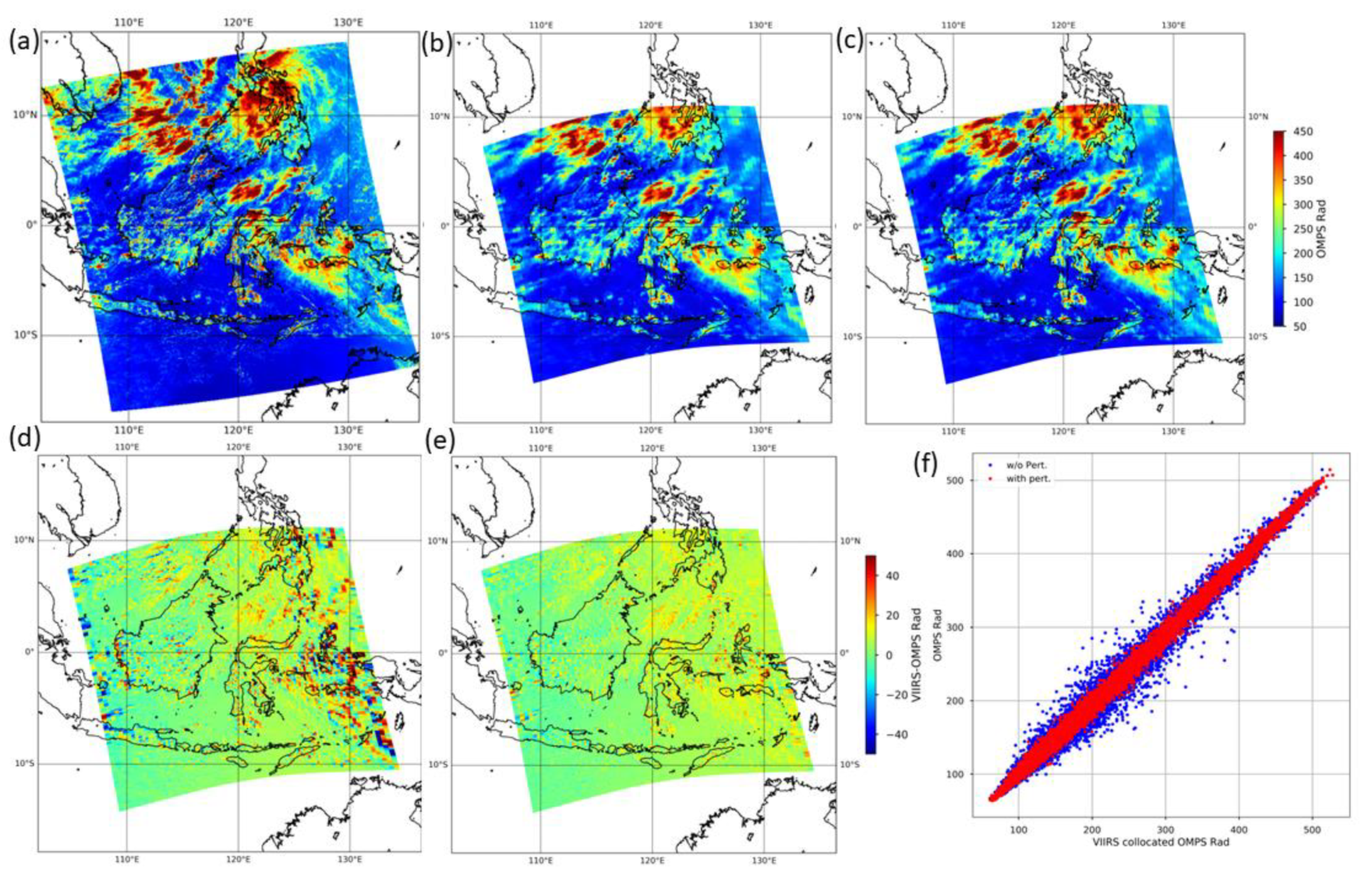
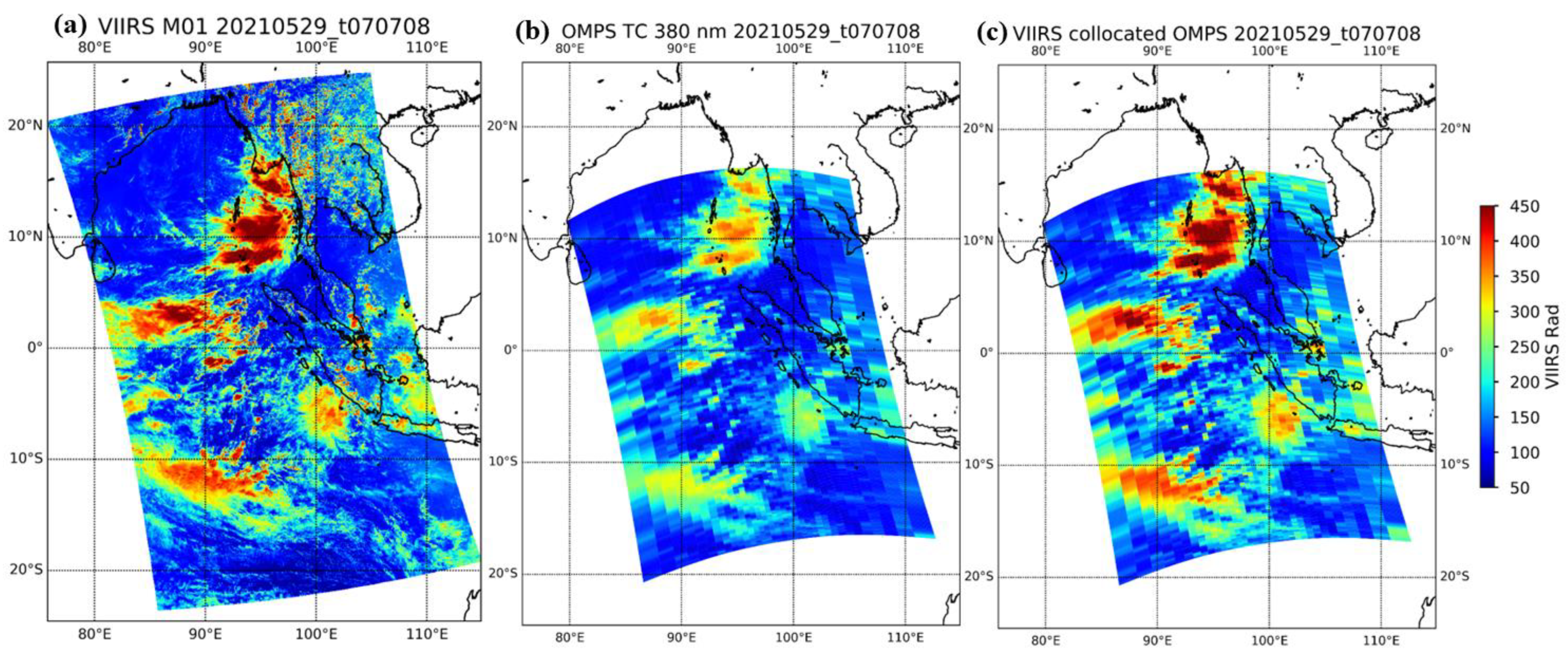
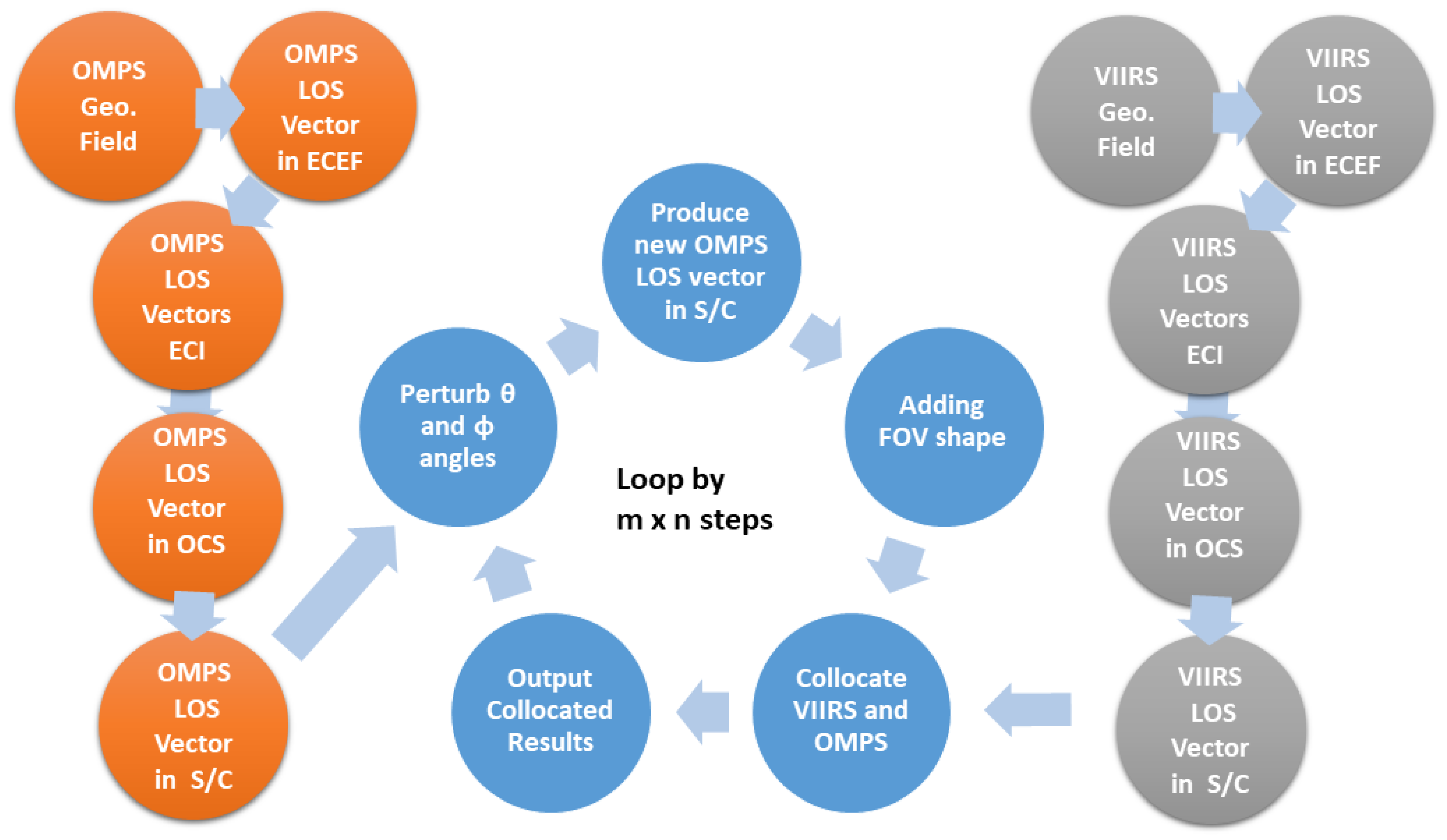
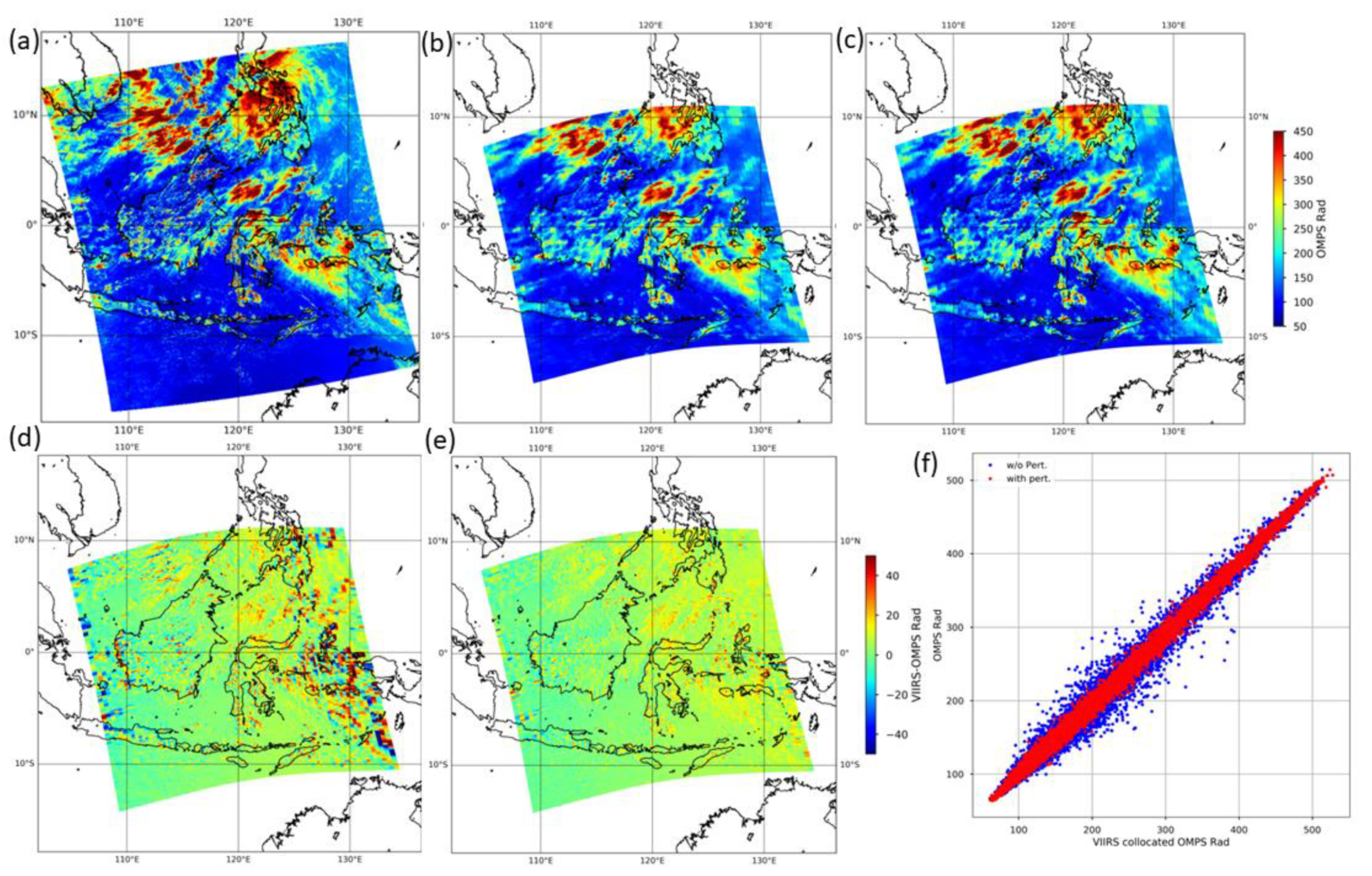
4.1. Collocation between OMPS-NM and VIIRS
4.2. Inverse Geolocation Computation
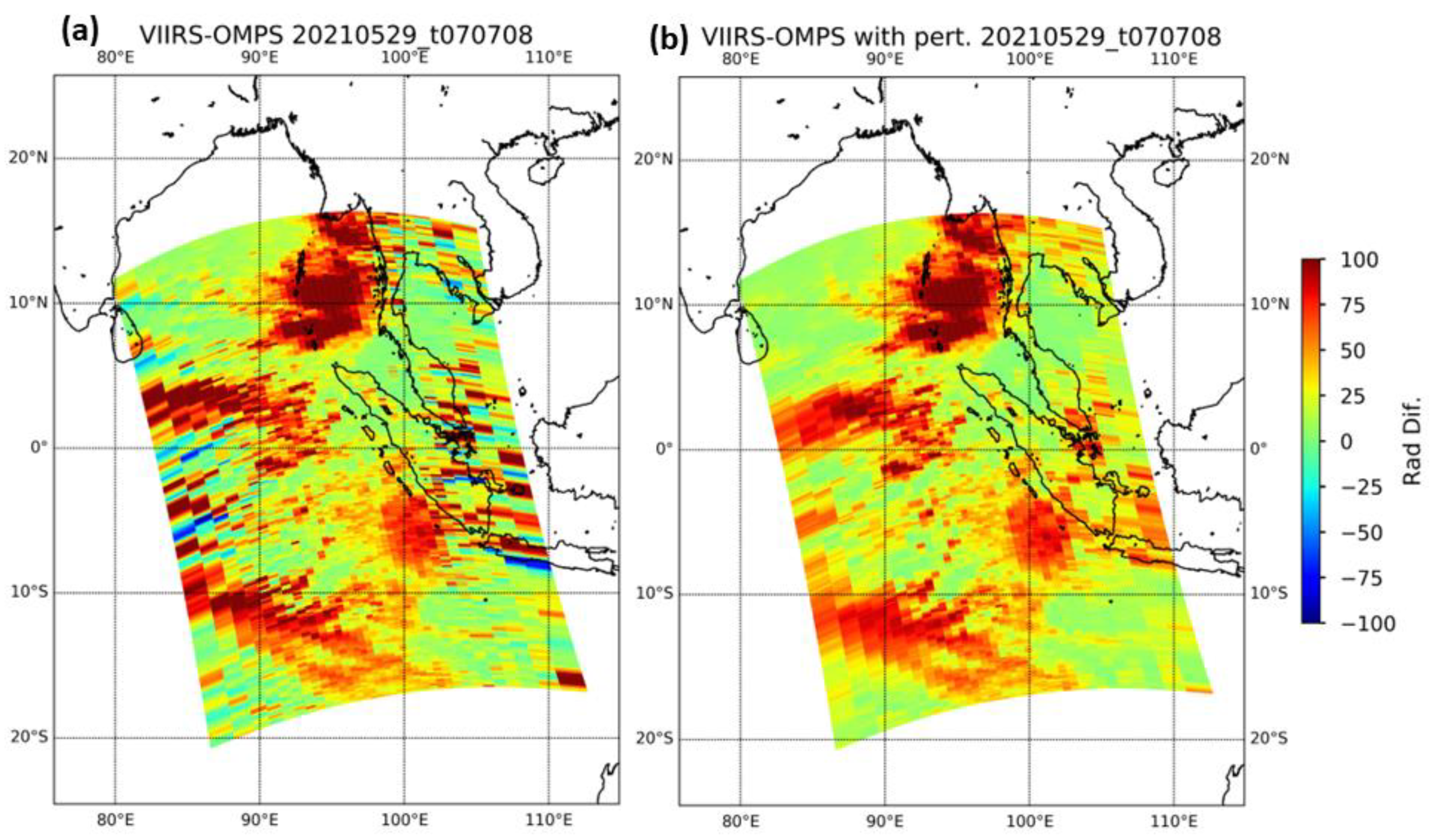
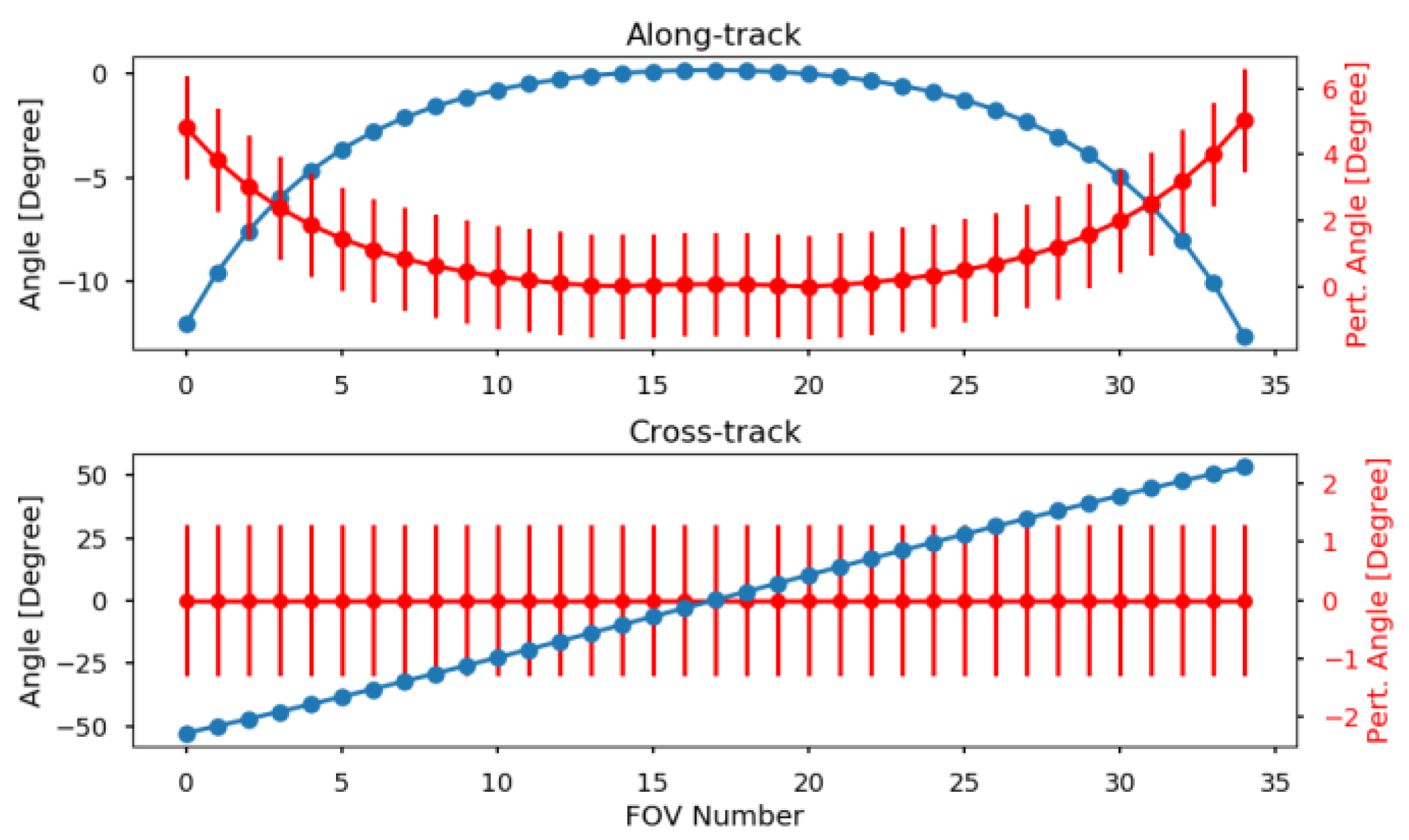
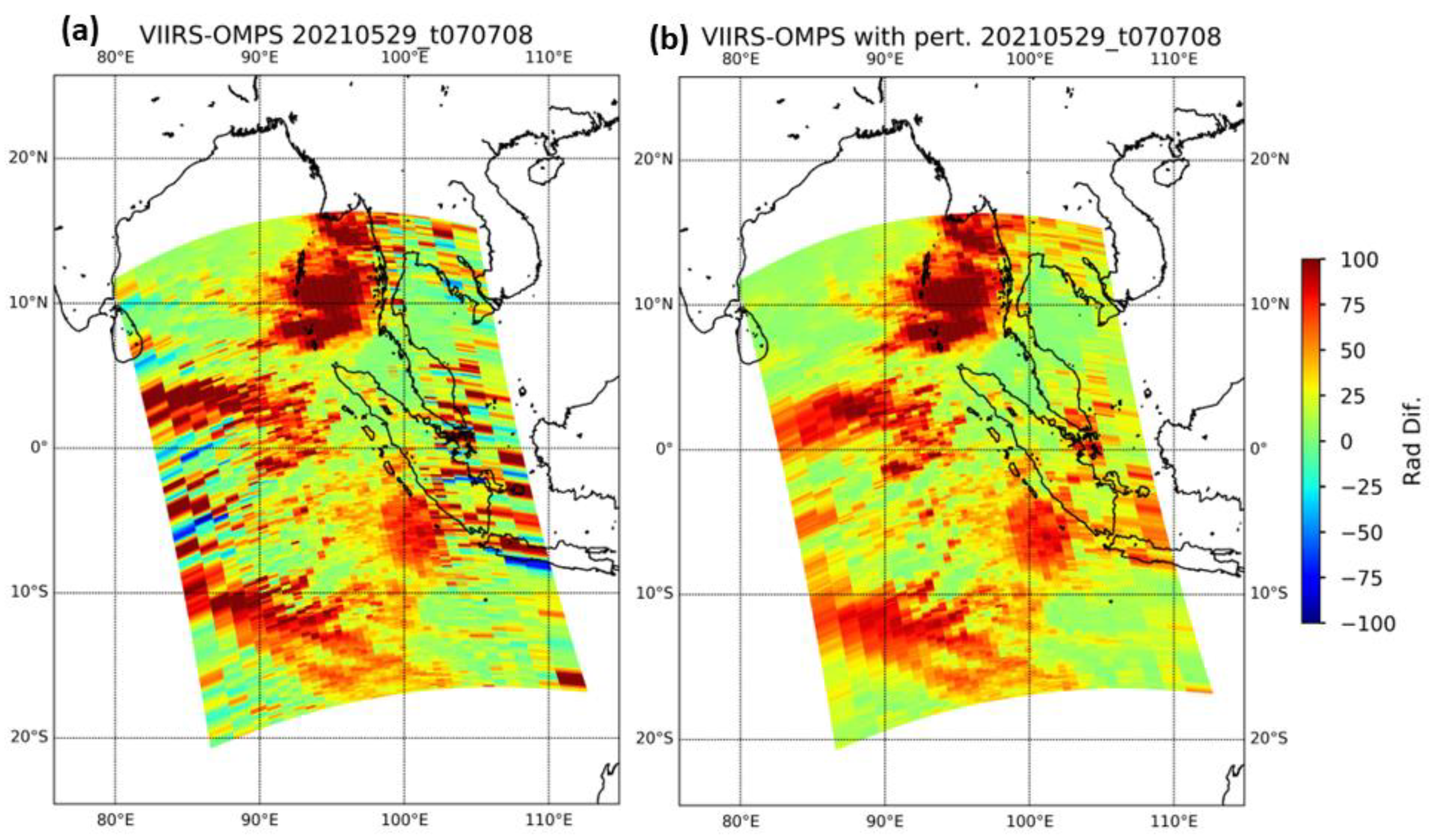
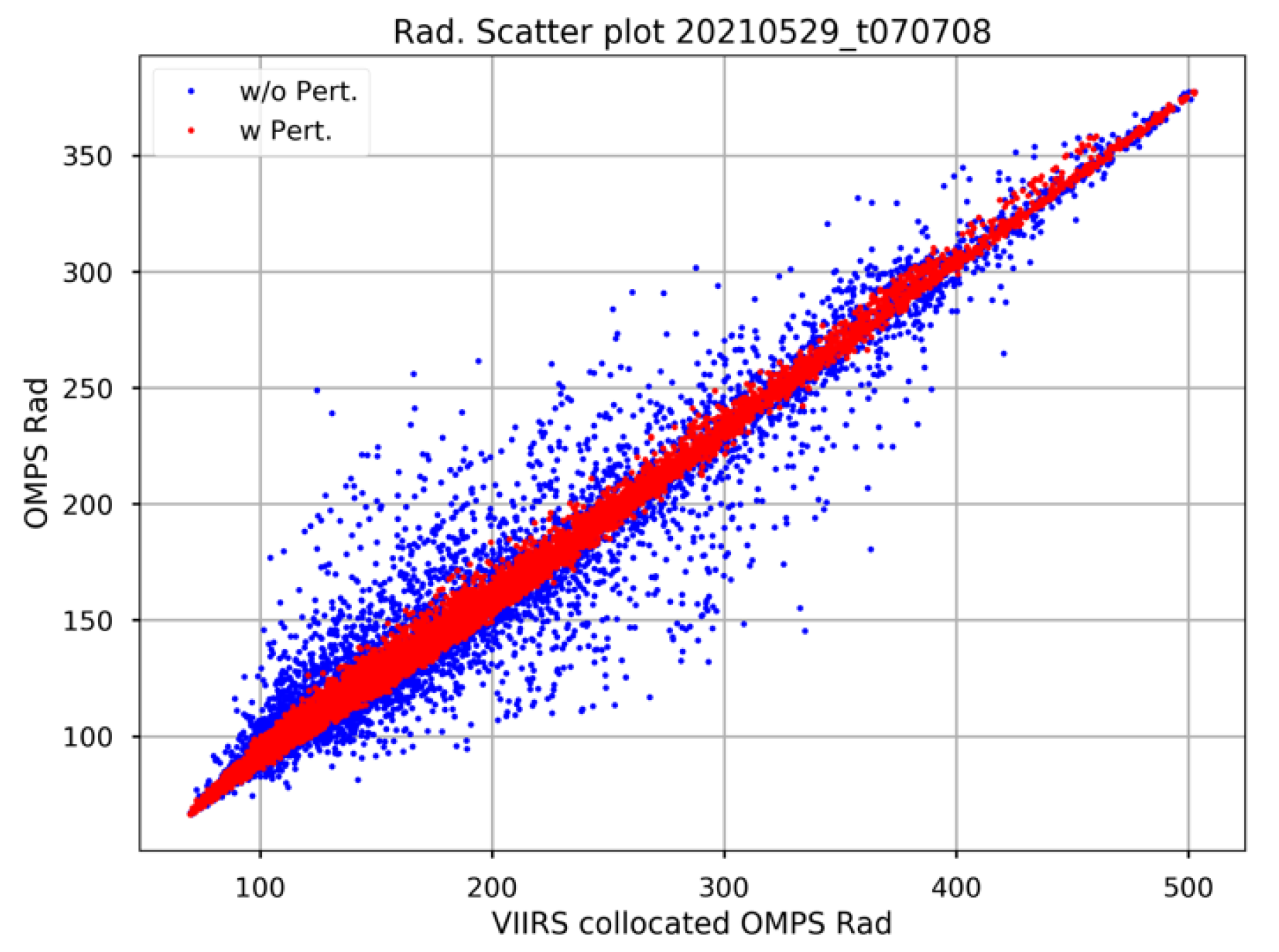
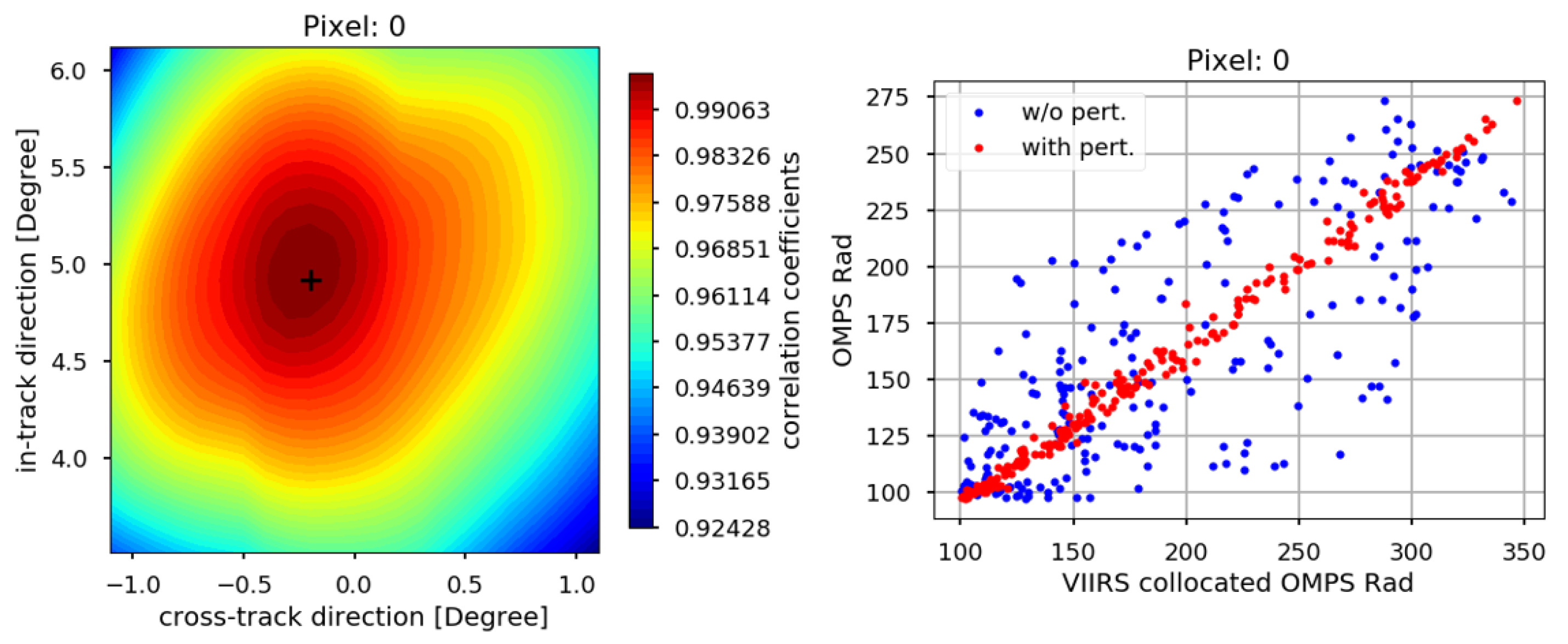
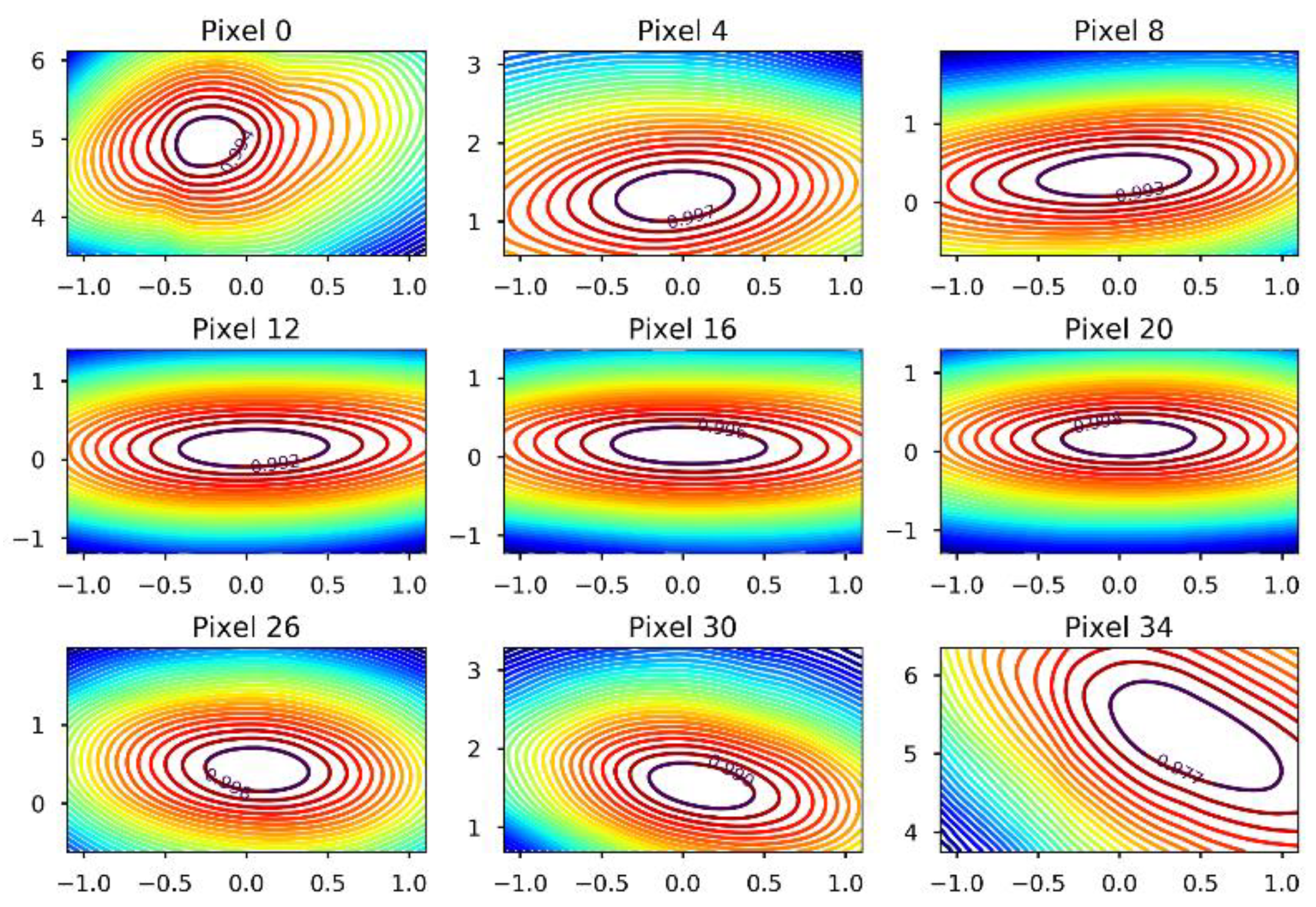
4.3. Perturbation of OMPS-NM LOS Vectors
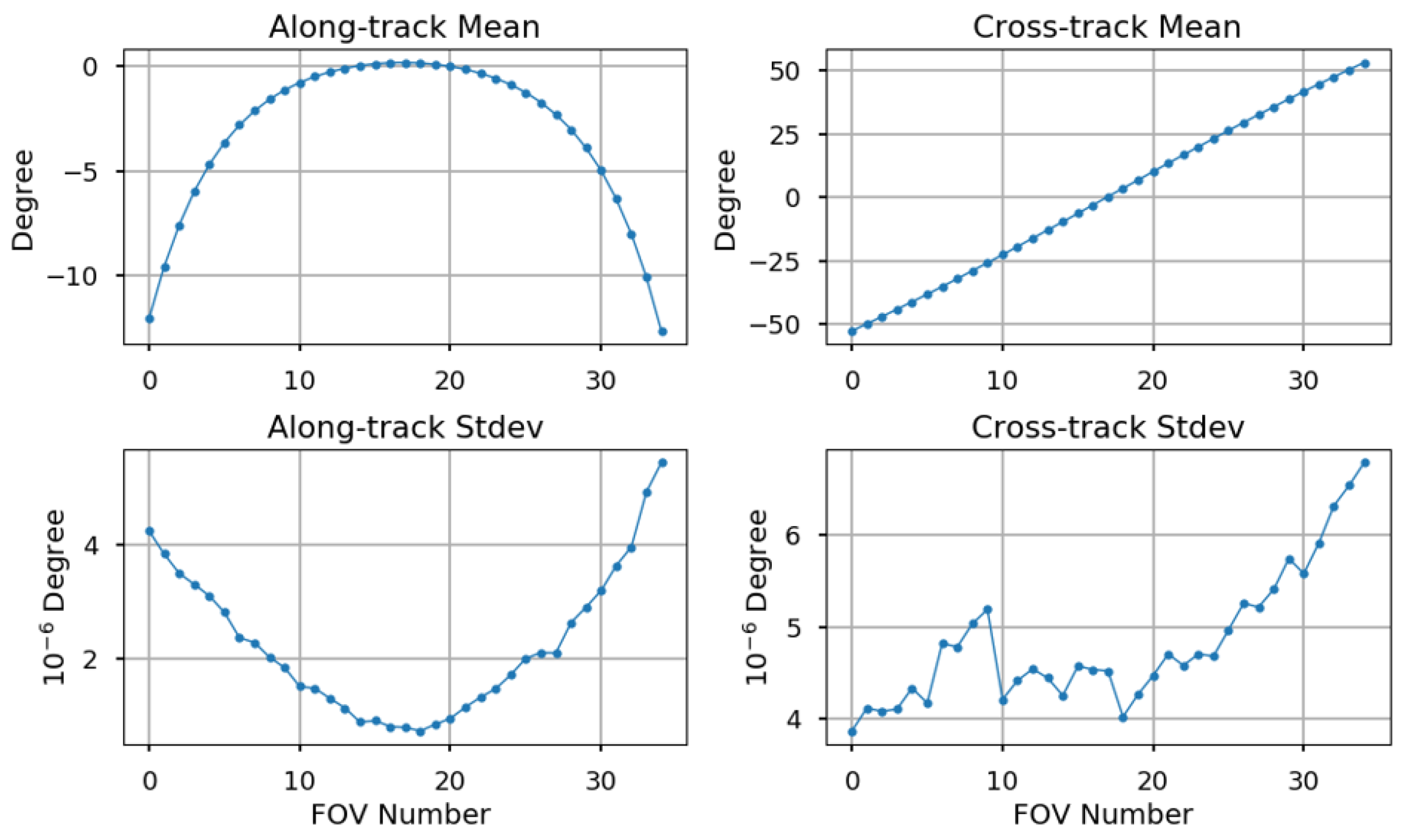
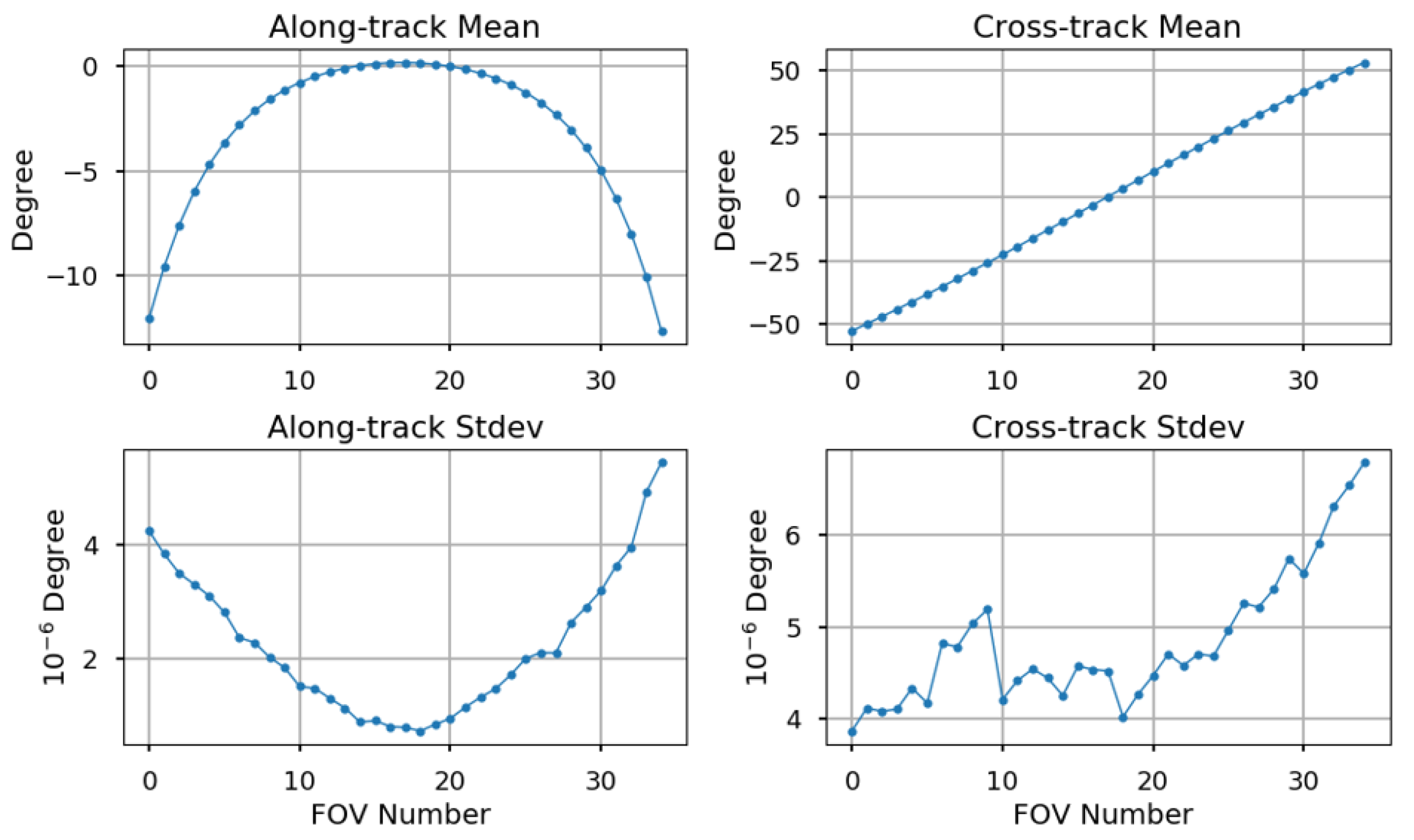
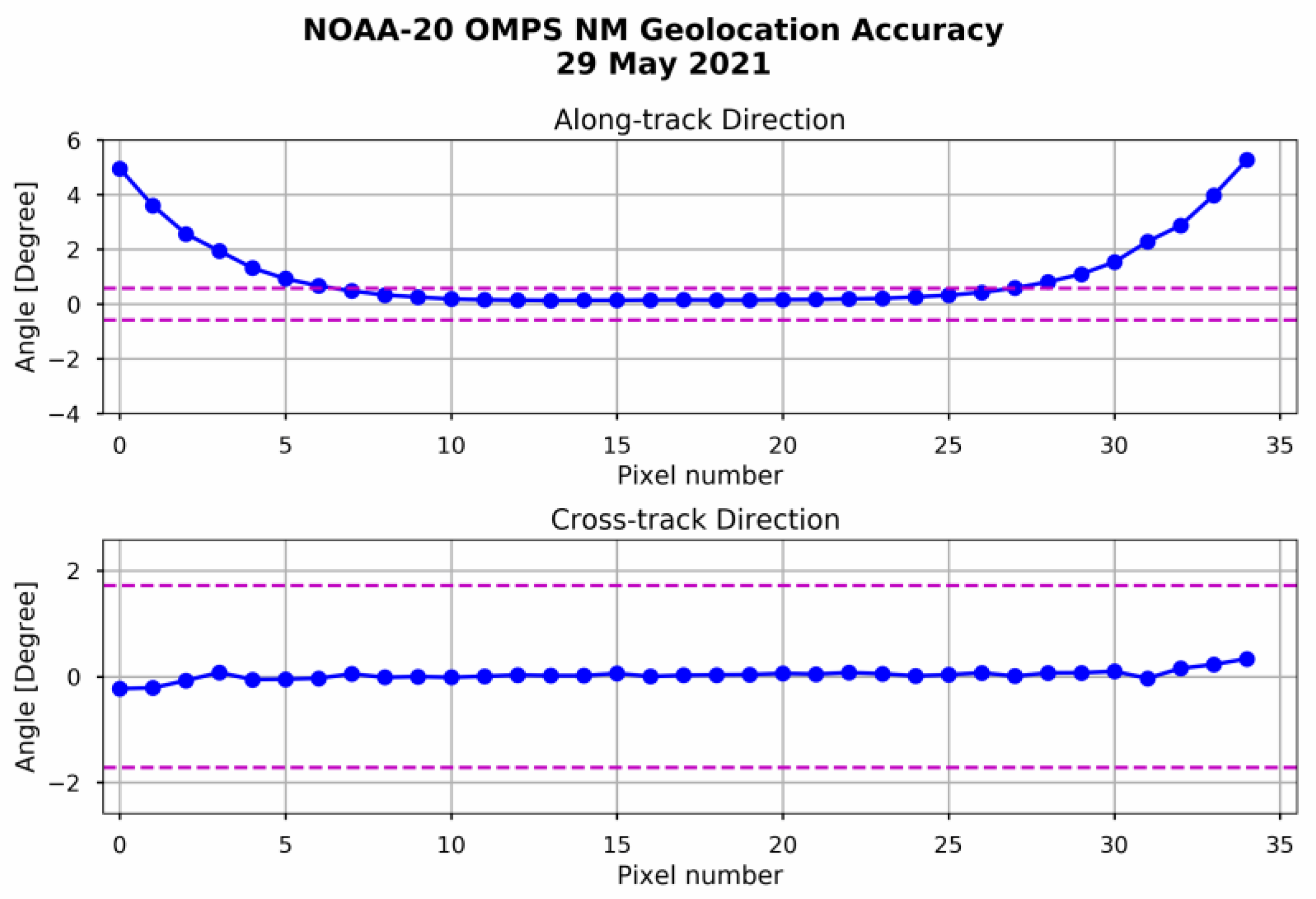
4.4. Determination of OMPS-NM Geolocation Accuracy
5. Application
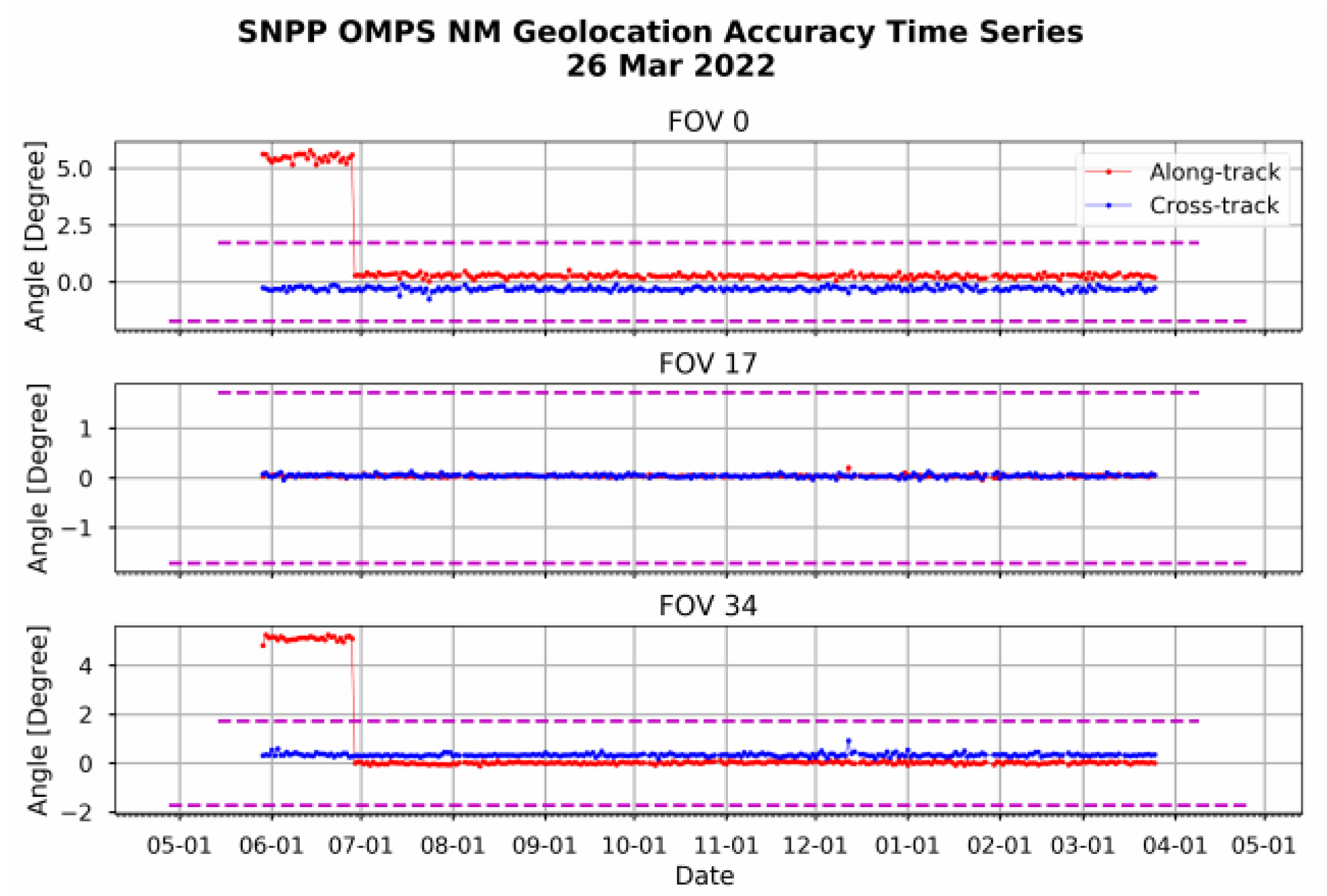
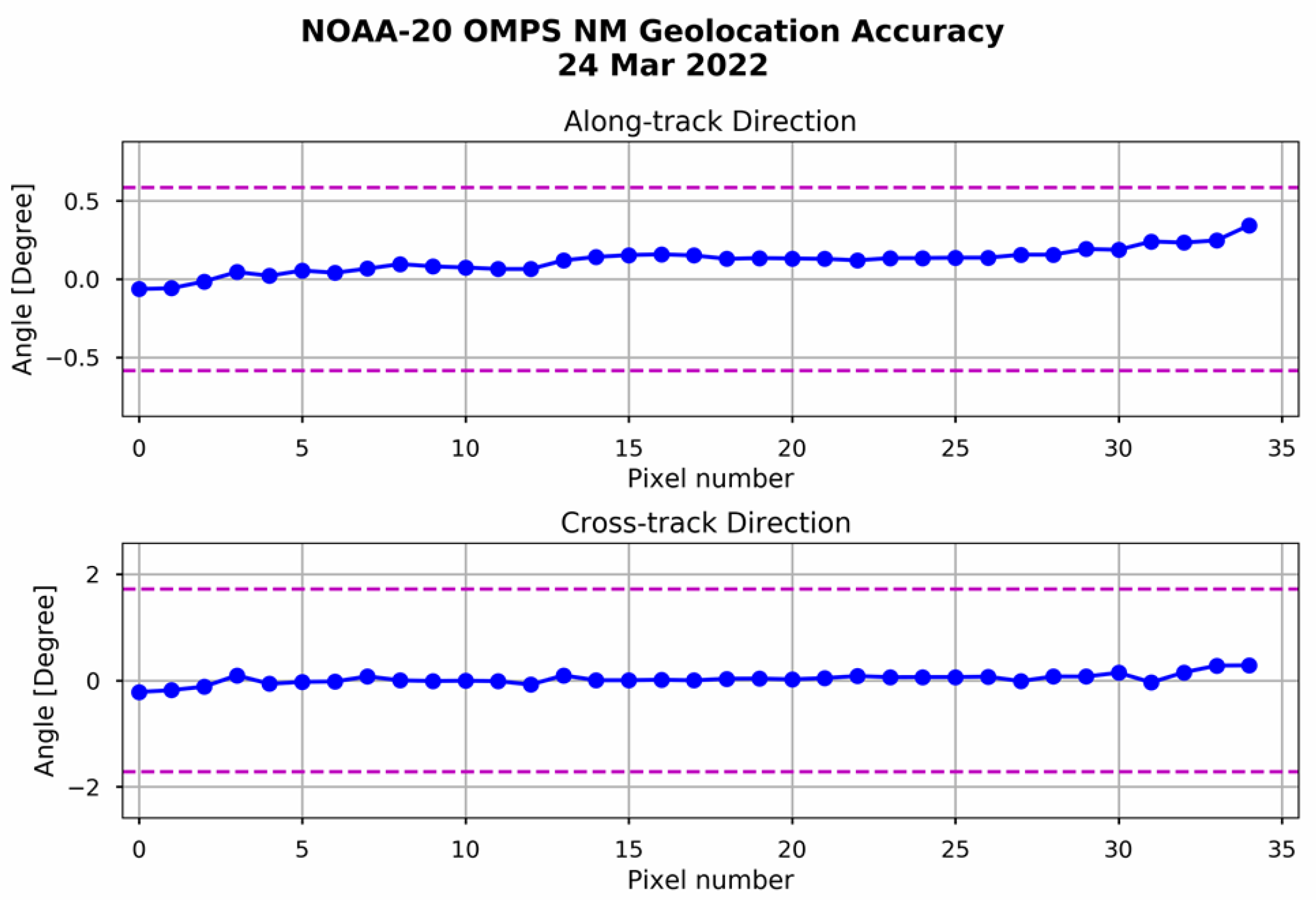
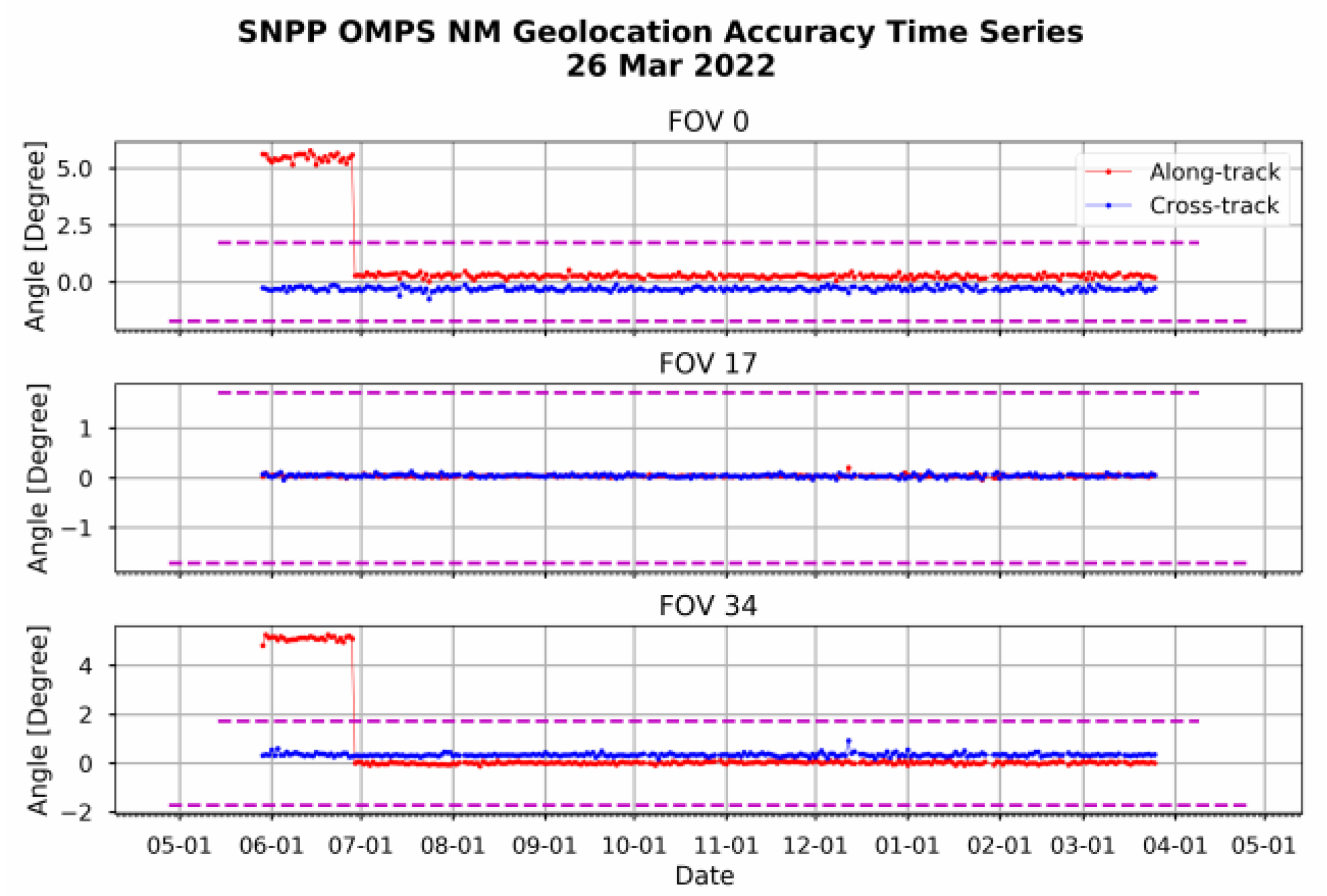
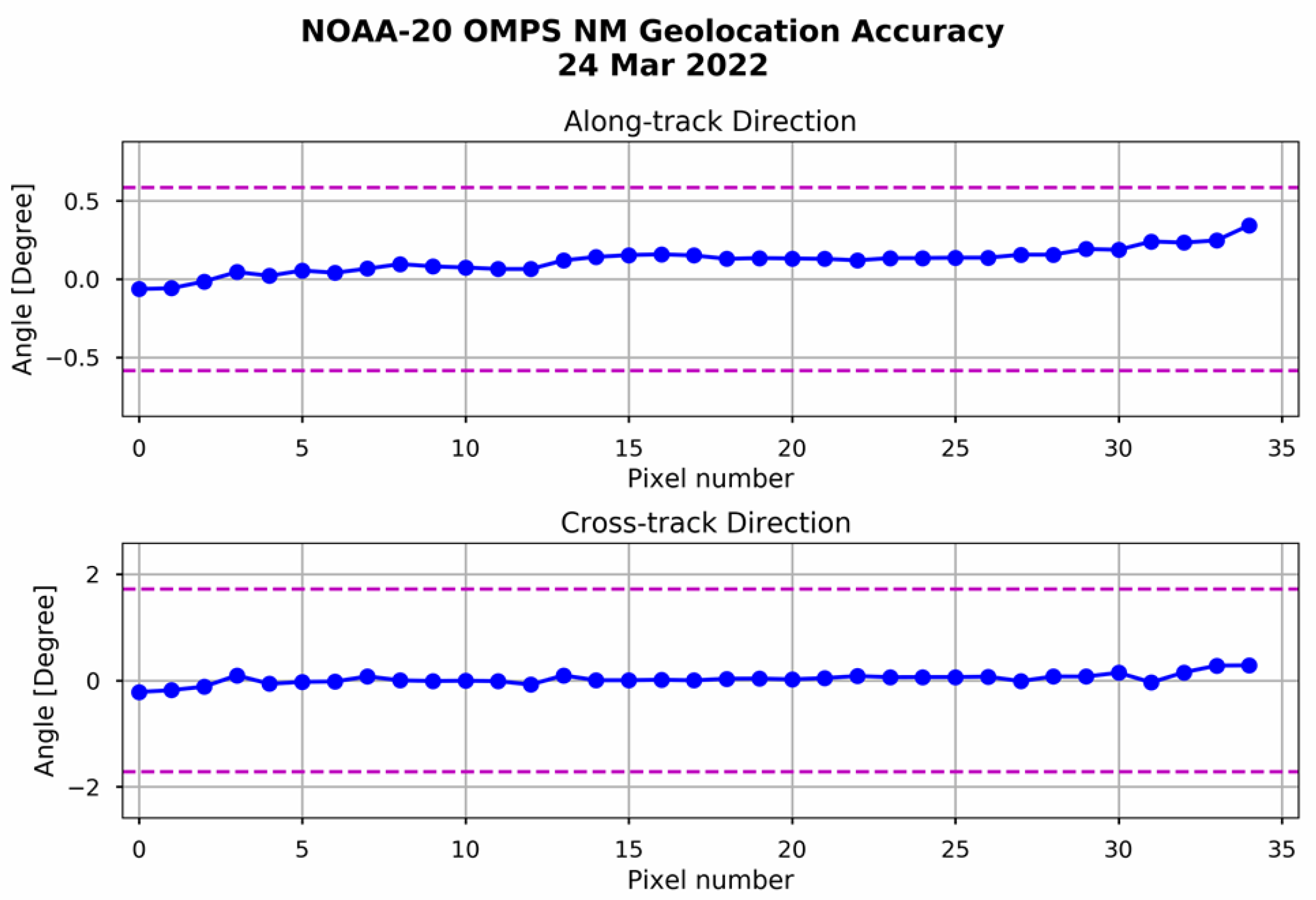
5.1. Application for SNPP and NOAA-20 Operational OMPS-NM Data
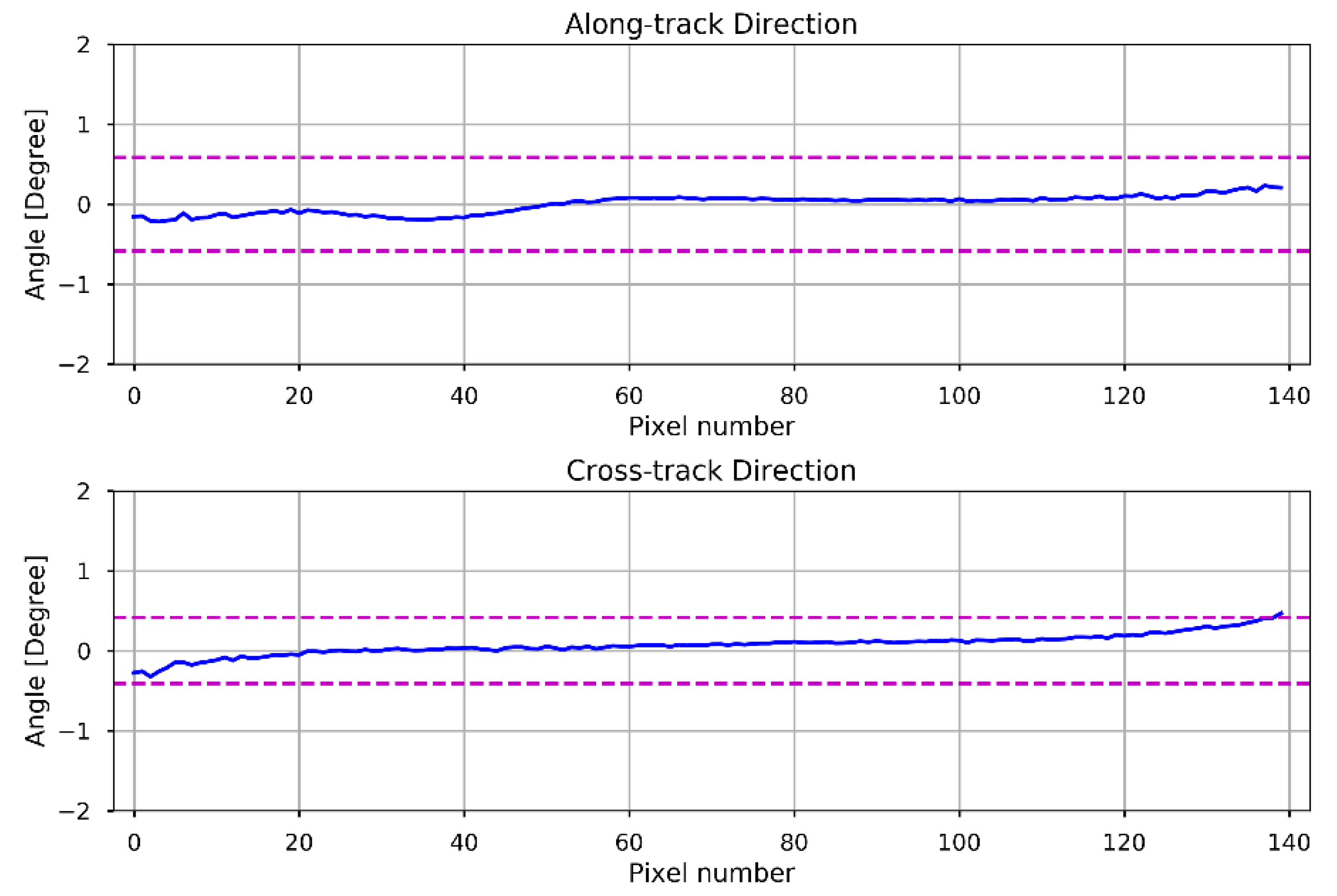
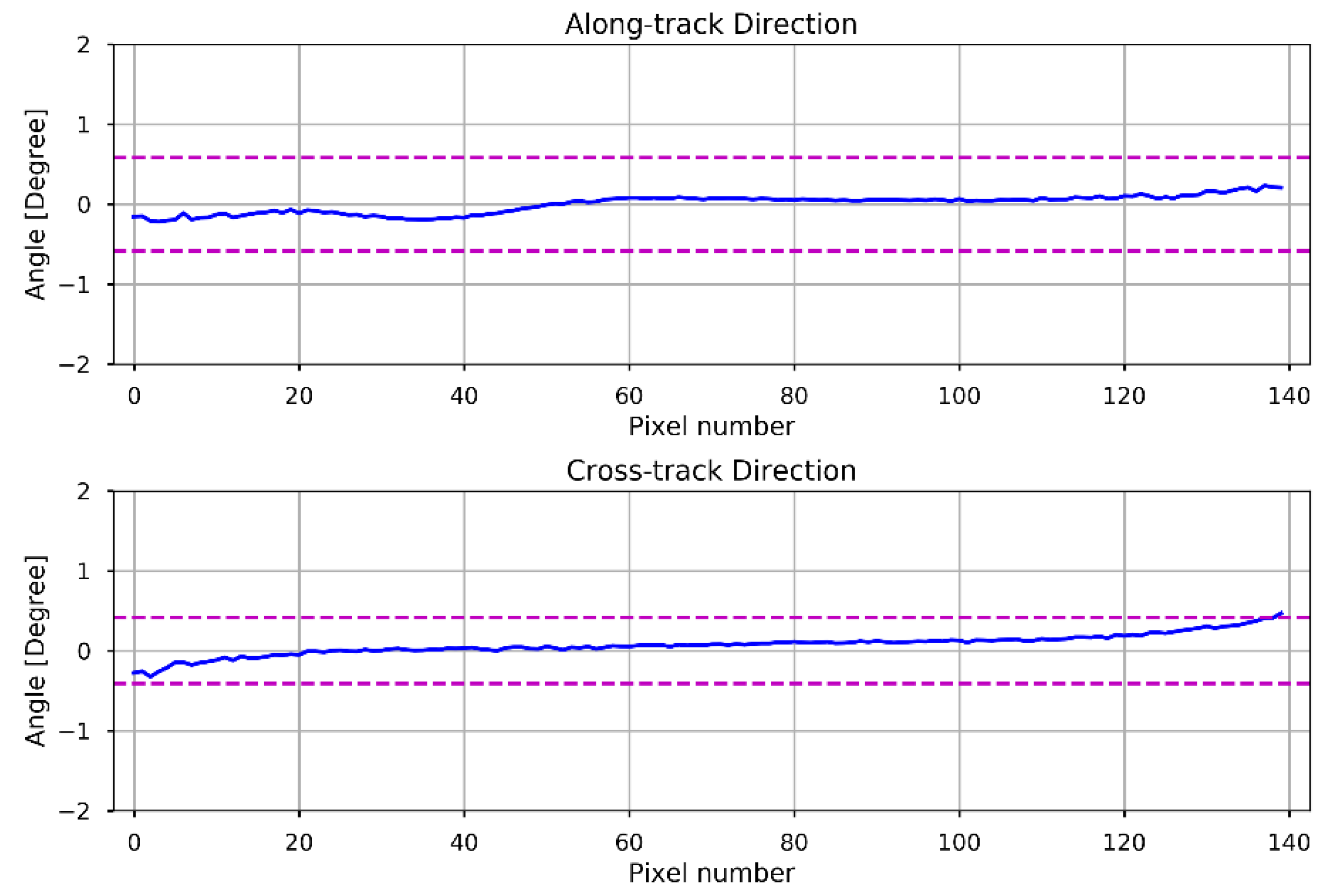
5.2. Potential Application for Future High-Resolution OMPS-NM Data
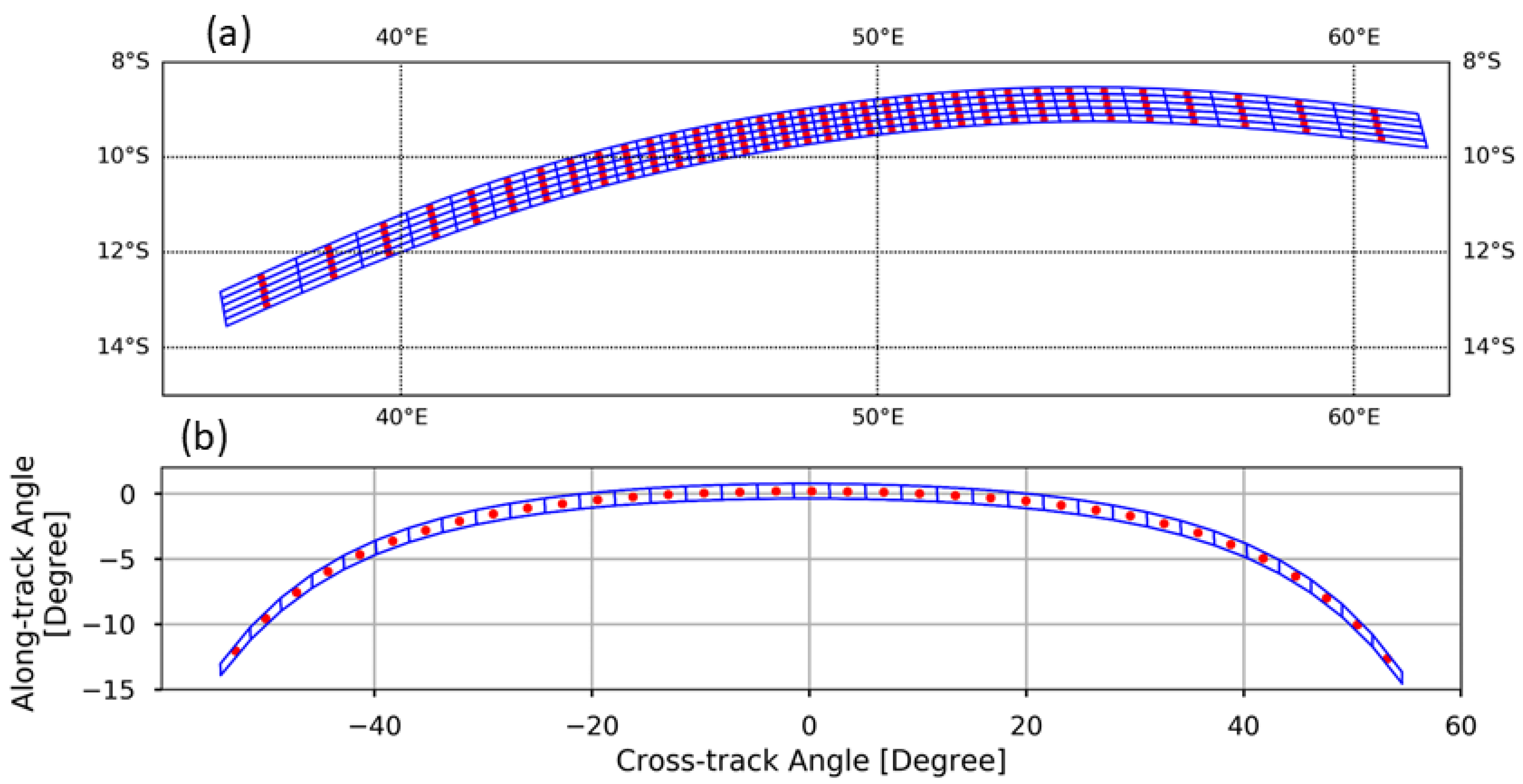
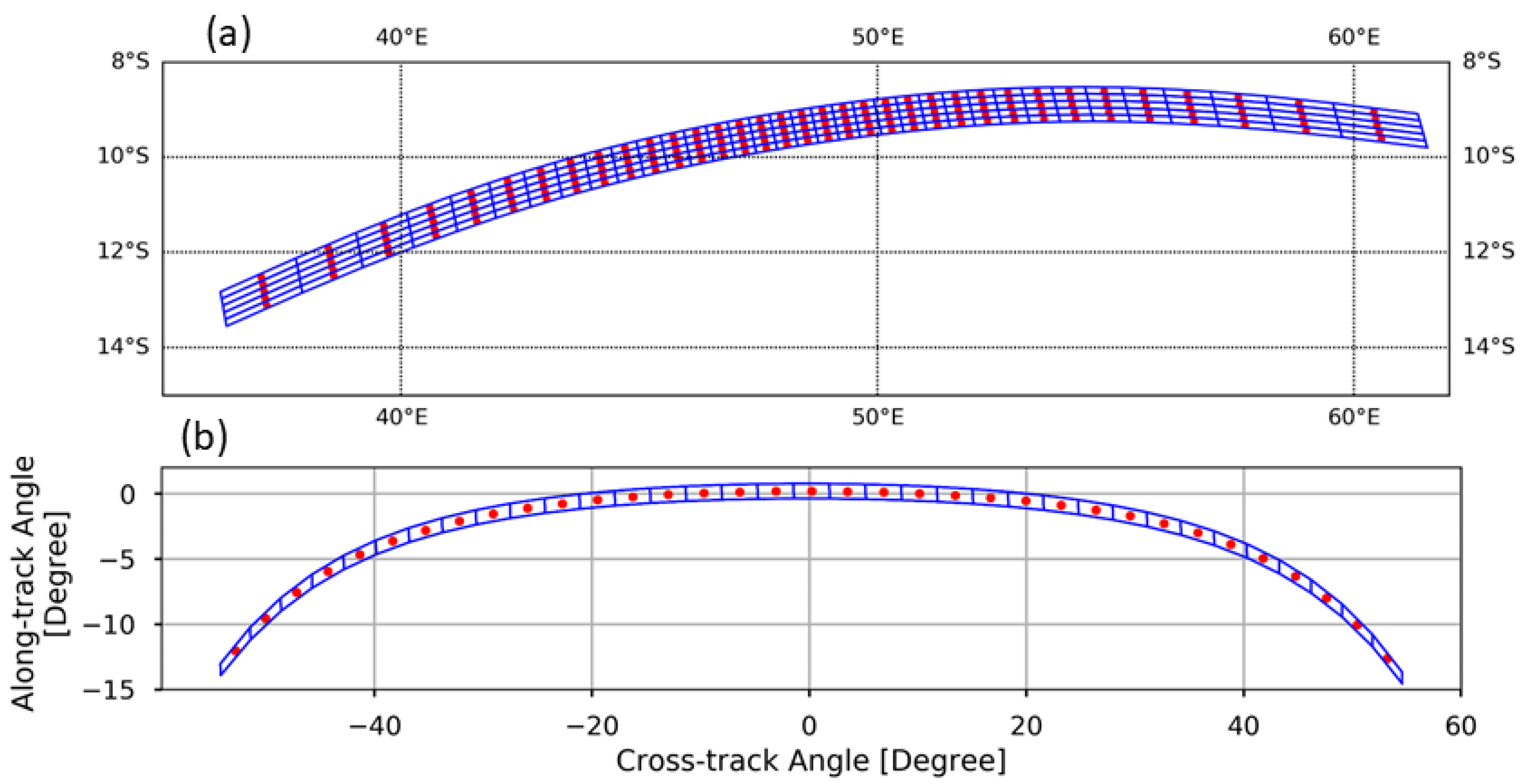
5.3. View Angle Optimization
6. Conclusions
- (1)
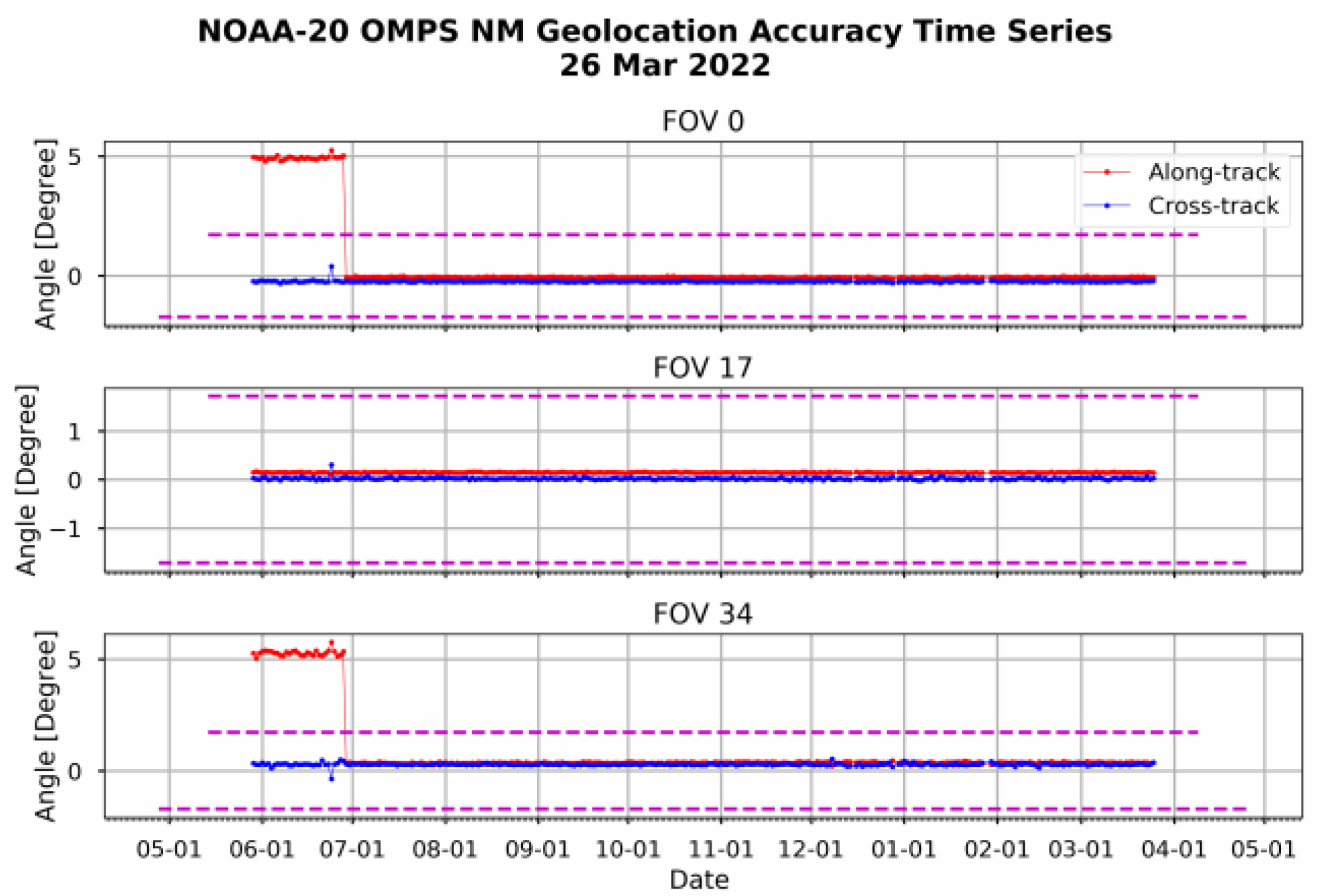
- The geolocation errors at the off-nadir positions are substantially reduced after the view angle table was updated on 28 June 2021.
- (2)
- With the updated view angle table, the geolocation accuracy for both SNPP and NOAA-20 OMPS-NM is on the sub-pixel level in both cross-track and along-track directions along all the scan positions, which is less than ¼ pixel (the worst scenario).
- (3)
- The geolocation accuracy is stable, varying with time with an updated view angle table.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Flynn, L.; Long, C.; Wu, X.; Evans, R.L.; Beck, C.T.; Petropavlovskikh, I.; Mcconville, G.; Yu, W.; Zhang, Z.; Niu, J.; et al. Performance of the Ozone Mapping and Profiler Suite (OMPS) products. J. Geophys. Res. Atmos. 2014, 119, 6181–6195. [Google Scholar] [CrossRef]
- Wu, X.; Liu, Q.; Zeng, J.; Grotenhuis, M.; Qian, H.; Caponi, M.; Flynn, L.; Jaross, G.; Sen, B.; Buss, R.H., Jr.; et al. Evaluation of the Sensor Data Record from the nadir instruments of the Ozone Mapping Profiler Suite (OMPS). J. Geophys. Res. Atmos. 2014, 119, 6170–6180. [Google Scholar] [CrossRef] [Green Version]
- Seftor, C.J.; Jaross, G.; Kowitt, M.; Haken, M.; Li, J.; Flynn, L.E. Postlaunch performance of the Suomi National Polar-orbiting Partnership Ozone Mapping and Profiler Suite (OMPS) nadir sensors. J. Geophys. Res. Atmos. 2014, 119, 4413–4428. [Google Scholar] [CrossRef] [Green Version]
- Pan, C.; Weng, F.; Flynn, L. Spectral Performance and Calibration of the Suomi NPP OMPS Nadir Profiler sensor. Earth Space Sci. 2017, 4, 737–745. [Google Scholar] [CrossRef]
- Pan, C.; Yan, B.; Cao, C.; Flynn, L.; Xiong, X.; Beach, E.; Zhou, L. Performance of OMPS Nadir Profilers’ Sensor Data Records. IEEE Trans. Geosci. Remote Sens. 2020, 59, 6885–6893. [Google Scholar] [CrossRef]
- Pan, C.; Weng, F.; Beck, T.; Flynn, L.; Ding, S. Recent Improvements to Suomi NPP Ozone Mapper Profiler Suite Nadir Mapper Sensor Data Records. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5770–5776. [Google Scholar] [CrossRef]
- Pan, C.; Zhou, L.; Cao, C.; Flynn, L.; Beach, E. Suomi-NPP OMPS Nadir Mapper’s Operational SDR Performance. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1015–1024. [Google Scholar] [CrossRef]
- Xiong, X.; Beck, T.; Pan, C. Status of NOAA-20 Ozone Monitoring Profiler Suite (OMPS) sensor data calibration and evaluation. In Earth Observing Systems XXIV; San Diego, CA, USA, 11–15 August 2019, SPIE: Bellingham, WA, USA, 2019; Volume 111271B. [Google Scholar] [CrossRef]
- Yan, B.; Beck, T.; Pan, C.; Xiong, X.; Devaliere, E.-M. NOAA-20 OMPS NM SDR Report for Validated Maturity Review, NOAA JPSS Science Review. September 2019. Available online: https://www.star.nesdis.noaa.gov/jpss/documents/AMM/N20/OMPS_TC_SDR_Validated.pdf (accessed on 1 October 2019).
- Yan, B.; Beck, T.; Pan, C.; Jaross, G.; Xiong, X.; Chen, J.; Liang, D.; Devalier, E.-M. NOAA-20 OMPS NP SDR Report for Validated Maturity Review, NOAA JPSS Science Review. April 2020. Available online: https://www.star.nesdis.noaa.gov/jpss/documents/AMM/N20/OMPS_NP_SDR_Validated.pdf (accessed on 1 May 2020).
- Seftor, C.J.; Tiruchirapalli, R. SNPP/N20 NM OMPS Geolocation Analysis of error, Development of correction. In Proceedings of the NASA Ozone Processing Team (OPT) Meeting, Greenbelt, MD, USA, 7 July 2020. [Google Scholar]
- Wang, L.; Tremblay, D.A.; Han, Y.; Esplin, M.; Hagan, D.E.; Predina, J.; Suwinski, L.; Jin, X.; Chen, Y. Geolocation assessment for CrIS sensor data records. J. Geophys. Res. Atmos. 2013, 118, 12690–12704. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, B.; Tremblay, D.; Han, Y. Improved scheme for Cross-track Infrared Sounder geolocation assessment and optimization. J. Geophys. Res. Atmos. 2017, 122, 519–536. [Google Scholar] [CrossRef]
- Wang, L.; Pan, C.; Yan, B.; Beck, T.; Chen, J.; Zhou, L.; Kalluri, S.; Goldberg, M. Geolocation Assessment and Optimization for OMPS Nadir Mapper: Root Cause Analysis. Remote Sens. 2021, Prepared. [Google Scholar]
- Cao, C.; Xiong, J.; Blonski, S.; Liu, Q.; Uprety, S.; Shao, X.; Bai, Y.; Weng, F. Suomi NPP VIIRS sensor data record verification, validation, and long-term performance monitoring. J. Geophys. Res. Atmos. 2013, 118, 11664–116788. [Google Scholar] [CrossRef]
- Wolfe, R.E.; Lin, G.; Nishihama, M.; Tewari, K.P.; Tilton, J.C.; Isaacman, A.R. Suomi NPP VIIRS prelaunch and on-orbit geometric calibration and characterization. J. Geophys. Res. Atmos. 2013, 118, 11508–11521. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Cao, C.; Blonski, S.; Gu, Y.; Zhang, B.; Uprety, S.; Choi, T.; Shao, X. NOAA-20/S-NPP VIIRS Sensor Data Record On-Orbit Performance Updates and Recent Improvements. In Proceedings of the 2020 International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September–2 October 2020. [Google Scholar]
- JPSS Ground Project Configuration Management Office. Joint Polar Satellite System (JPSS) OMPS NADIR Total Column Ozone Algorithm Theoretical Basis Document (ATBD). 2014. Available online: https://www.star.nesdis.noaa.gov/jpss/documents/ATBD/D0001-M01-S01-006_JPSS_ATBD_OMPS-TC-Ozone_C.pdf (accessed on 1 January 2014).
- JPSS Ground Project Configuration Management Office. Joint Polar Satellite System (JPSS) VIIRS Geolocation Algorithm Theoretical Basis Document (ATBD). 2017. Available online: https://www.star.nesdis.noaa.gov/jpss/documents/ATBD/D0001-M01-S01-004_JPSS_ATBD_VIIRS-Geolocation_A.pdf (accessed on 1 January 2017).
- JPSS Configuration Management Office. Joint Polar Satellite System (JPSS) Operational Algorithm Description (OAD) Document for Common Geolocation Software. 2017. Available online: https://www.jpss.noaa.gov/sciencedocuments/sciencedocs/2017-06/474-00091_OAD-Cmn-Geo_C.pdf (accessed on 1 January 2017).
- Hua, X.-M.; Pan, J.; Ouzounov, D.; Lyapustin, A.; Wang, Y.; Tewari, K.; Leptoukh, G.; Vollmer, B. A Spatial Prescreening Technique for Earth Observation Data. IEEE Geosci. Remote Sens. Lett. 2007, 4, 152–156. [Google Scholar] [CrossRef]
- Wang, L.; Tremblay, D.; Zhang, B.; Han, Y. Fast and Accurate Collocation of the Visible Infrared Imaging Radiometer Suite Measurements with Cross-Track Infrared Sounder. Remote Sens. 2016, 8, 76. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Platform | Cross-Track | Along-Track | Producer | ||
|---|---|---|---|---|---|
| Nadir Resolution (km) | Macropixels per scan | Integration Time (seconds) | Nadir Resolution (km) | ||
| SNPP | 50 | 35 | 7.5 | 50 | NOAA IDPS |
| NOAA-20 | 50 | 35 | 2.5 | 17 | NOAA IDPS |
| NOAA-20 | 12.5 | 140 | 2.5 | 17 | NASA SIPS |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Pan, C.; Yan, B.; Beck, T.; Chen, J.; Zhou, L.; Kalluri, S.; Goldberg, M. Geolocation Assessment and Optimization for OMPS Nadir Mapper: Methodology. Remote Sens. 2022, 14, 3040. https://doi.org/10.3390/rs14133040
Wang L, Pan C, Yan B, Beck T, Chen J, Zhou L, Kalluri S, Goldberg M. Geolocation Assessment and Optimization for OMPS Nadir Mapper: Methodology. Remote Sensing. 2022; 14(13):3040. https://doi.org/10.3390/rs14133040
Chicago/Turabian StyleWang, Likun, Chunhui Pan, Banghua Yan, Trevor Beck, Junye Chen, Lihang Zhou, Satya Kalluri, and Mitch Goldberg. 2022. "Geolocation Assessment and Optimization for OMPS Nadir Mapper: Methodology" Remote Sensing 14, no. 13: 3040. https://doi.org/10.3390/rs14133040
APA StyleWang, L., Pan, C., Yan, B., Beck, T., Chen, J., Zhou, L., Kalluri, S., & Goldberg, M. (2022). Geolocation Assessment and Optimization for OMPS Nadir Mapper: Methodology. Remote Sensing, 14(13), 3040. https://doi.org/10.3390/rs14133040