
Using Support Vector Machine (SVM) with GPS Ionospheric TEC Estimations to Potentially Predict Earthquake Events


Abstract
1. Introduction
1.1. Natural Hazard Signatures Associated with Geodynamic Processes
1.2. Machine Learning and Deep Learning
1.3. Ionospheric Total Electron Content (TEC)
2. Motivation
3. Datasets and Methodology
3.1. Datasets
3.1.1. Earthquakes Dataset
3.1.2. TEC Dataset
3.1.3. Solar Flares, Geomagnetic Storms, and Coronal Mass Ejection (CME) Datasets
3.2. Methodology
3.2.1. TEC Data Rejection
3.2.2. TEC Data Pre-Processing
- 1.
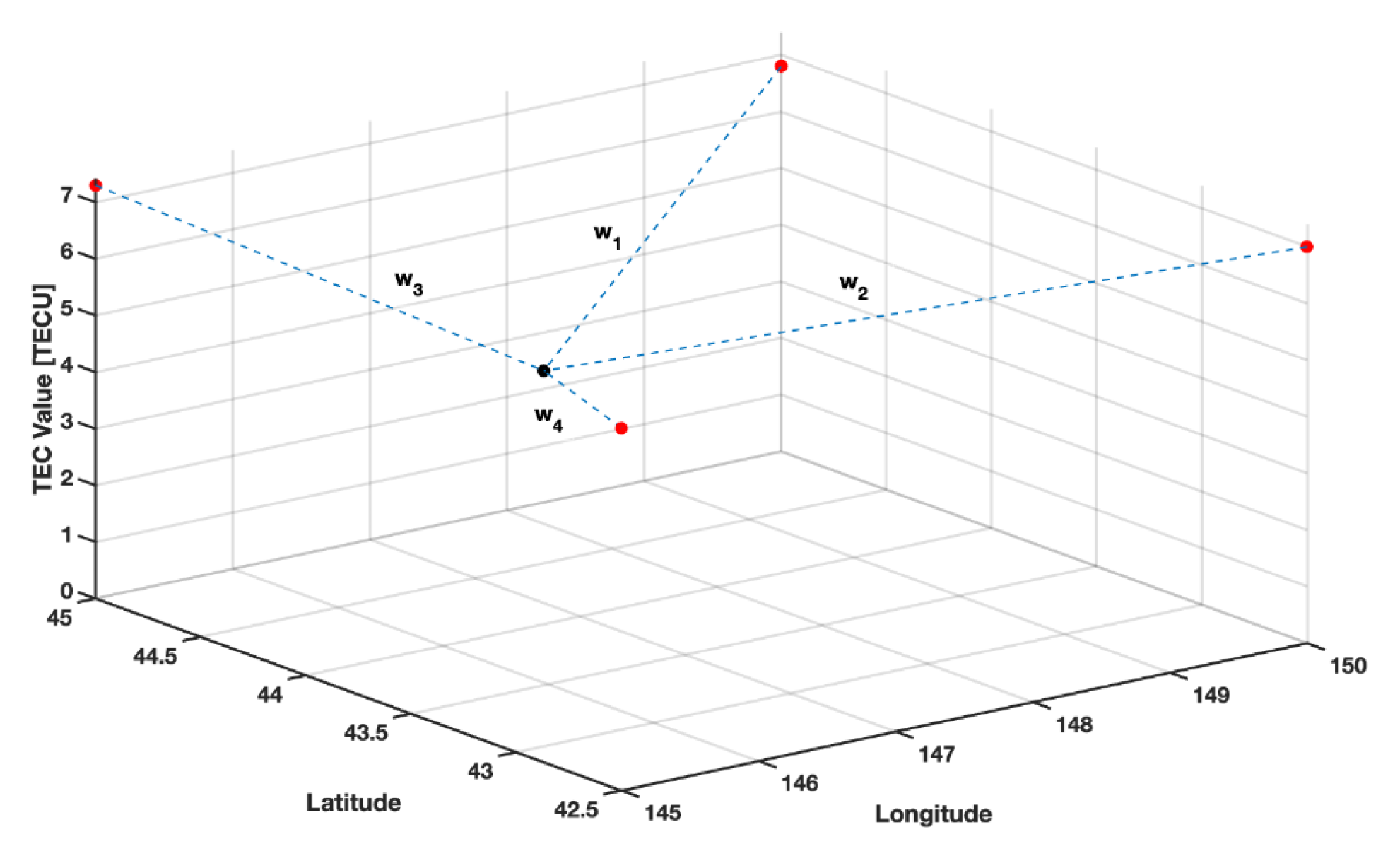
- Epicenter TEC value evaluation:
- 2.
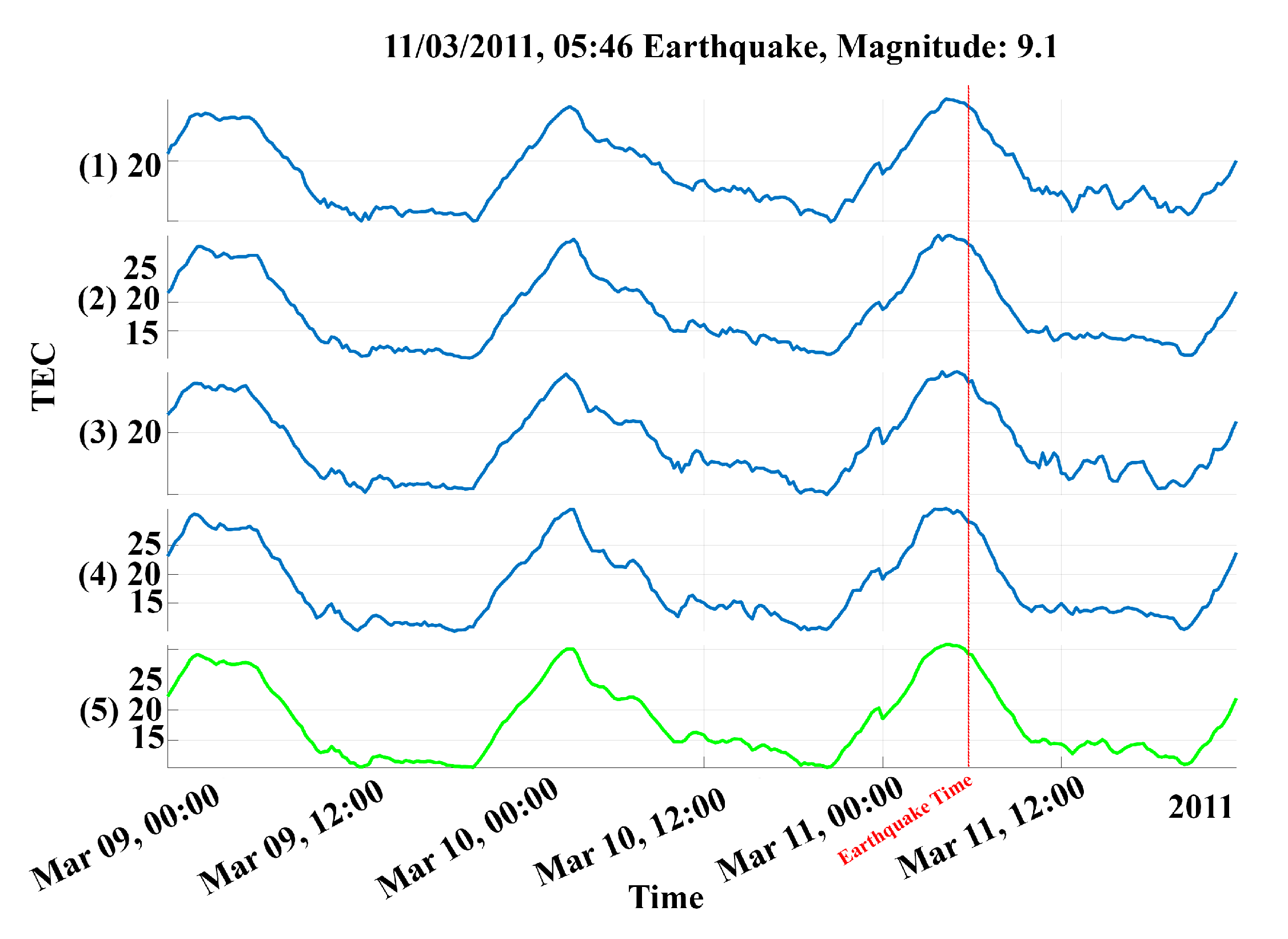
- Epicenter time series generation:
- 3.
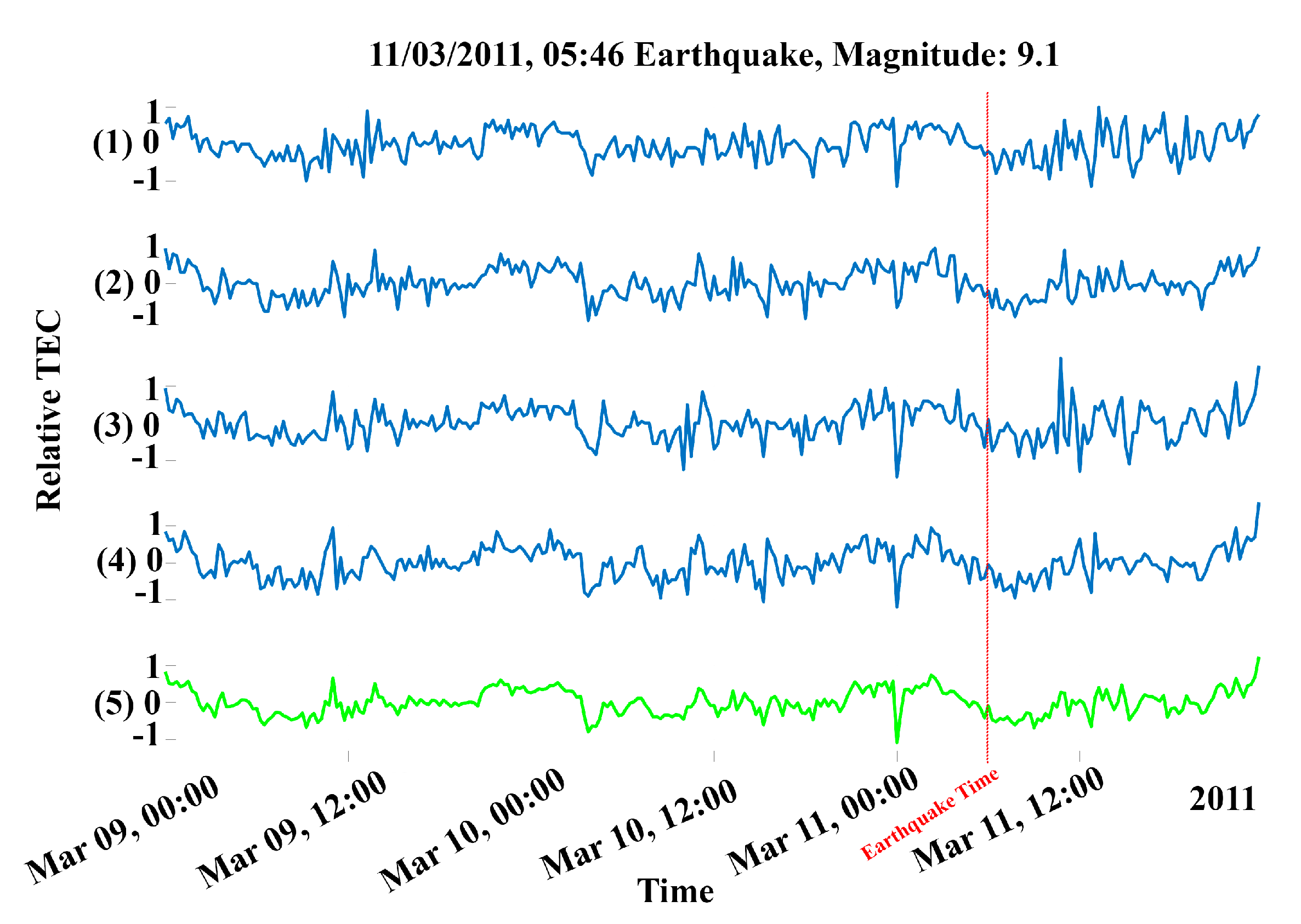
- TEC detrending time series:
- 4.
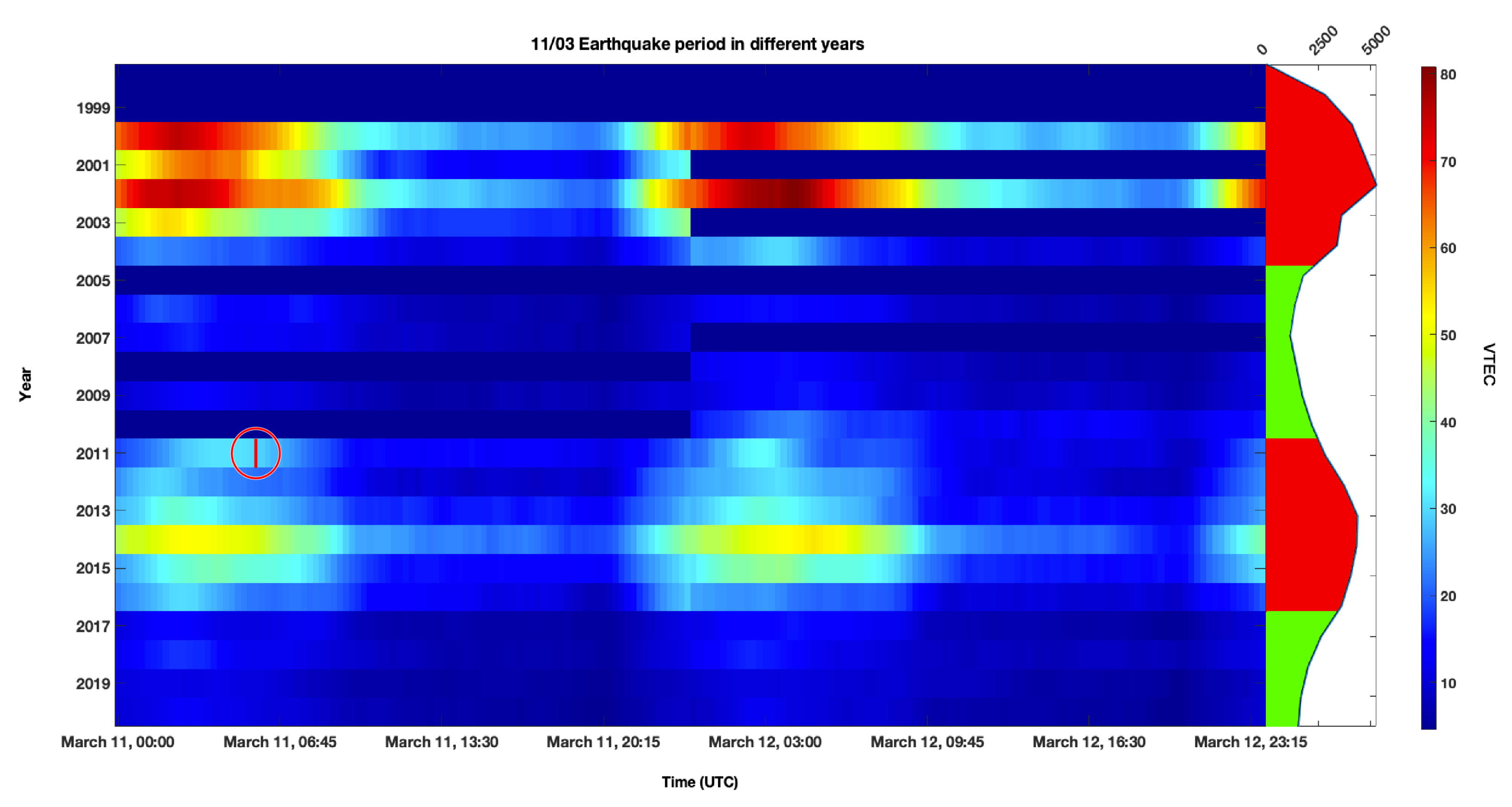
- Ionospheric Quiet days–mean and standard deviation TEC time series estimation:
3.2.3. Bayesian Hyperparameter Optimization for SVM
4. Experimental Results
5. Analysis and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| TEC | total electron content |
| SVM | support vector machine |
| GNSS | global navigation satellite system |
| ML | machine learning |
| RF | random forest |
| DL | deep learning |
| ANNs | artificial neural networks |
| CNNs | convolutional neural networks |
| RNNs | recurrent neural networks |
| LSTM | long short-term memory |
| EUV | extreme ultra-violet |
| InSAR | interferometric synthetic aperture radar |
| GOES | Geostationary Operational Environmental Satellites |
Appendix A




References
- DeVries, P.M.; Viégas, F.; Wattenberg, M.; Meade, B.J. Deep learning of aftershock patterns following large earthquakes. Nature 2018, 560, 632–634. [Google Scholar] [CrossRef] [PubMed]
- Woith, H.; Petersen, G.M.; Hainzl, S.; Dahm, T. Can animals predict earthquakes? Bull. Seismol. Soc. Am. 2018, 108, 1031–1045. [Google Scholar] [CrossRef]
- Singh, D.; Pandey, D.; Mina, U. Earthquake—a natural disaster, prediction, mitigation, laws and government policies, impact on biogeochemistry of earth crust, role of remote sensing and gis in management in india—An overview. J. Geosci. 2019, 7, 88–96. [Google Scholar]
- Zhao, X.; Li, H.; Wang, P.; Jing, L. An image registration method for multisource high-resolution remote sensing images for earthquake disaster assessment. Sensors 2020, 20, 2286. [Google Scholar] [CrossRef]
- Ha, H.; Luu, C.; Bui, Q.D.; Pham, D.H.; Hoang, T.; Nguyen, V.P.; Vu, M.T.; Pham, B.T. Flash flood susceptibility prediction mapping for a road network using hybrid machine learning models. Nat. Hazards 2021, 109, 1247–1270. [Google Scholar] [CrossRef]
- Asaly, S.; Gottlieb, L.A.; Reuveni, Y. Using support vector machine (SVM) and ionospheric total electron content (TEC) data for solar flare predictions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1469–1481. [Google Scholar] [CrossRef]
- Kanamori, H.; Brodsky, E.E. The physics of earthquakes. Rep. Prog. Phys. 2004, 67, 1429. [Google Scholar] [CrossRef]
- Scholz, C.H. The Mechanics of Earthquakes and Faulting; Cambridge University Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Morra, G.; Seton, M.; Quevedo, L.; Müller, R.D. Organization of the tectonic plates in the last 200 Myr. Earth Planet. Sci. Lett. 2013, 373, 93–101. [Google Scholar] [CrossRef]
- King, S.D.; Gable, C.W.; Weinstein, S.A. Models of convection-driven tectonic plates: A comparison of methods and results. Geophys. J. Int. 1992, 109, 481–487. [Google Scholar] [CrossRef]
- Harrison, C.G. The present-day number of tectonic plates. Earth Planets Space 2016, 68, 37. [Google Scholar] [CrossRef]
- Gurnis, M.; Yang, T.; Cannon, J.; Turner, M.; Williams, S.; Flament, N.; Müller, R.D. Global tectonic reconstructions with continuously deforming and evolving rigid plates. Comput. Geosci. 2018, 116, 32–41. [Google Scholar] [CrossRef]
- Rauter, M.; Winkler, D. Predicting natural hazards with neuronal networks. arXiv 2018, arXiv:1802.07257. [Google Scholar]
- Luo, J.; Pei, X.; Evans, S.G.; Huang, R. Mechanics of the earthquake-induced Hongshiyan landslide in the 2014 Mw 6.2 Ludian earthquake, Yunnan, China. Eng. Geol. 2019, 251, 197–213. [Google Scholar] [CrossRef]
- Lapusta, N. Mechanics of Earthquake Source Processes: Insights from Numerical Modeling. In Proceedings of the International Conference on Theoretical, Applied and Experimental Mechanics, Paphos, Cyprus, 17–20 June 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 156–158. [Google Scholar]
- Heki, K.; Ping, J. Directivity and apparent velocity of the coseismic ionospheric disturbances observed with a dense GPS array. Earth Planet. Sci. Lett. 2005, 236, 845–855. [Google Scholar] [CrossRef]
- Heki, K.; Otsuka, Y.; Choosakul, N.; Hemmakorn, N.; Komolmis, T.; Maruyama, T. Detection of ruptures of Andaman fault segments in the 2004 great Sumatra earthquake with coseismic ionospheric disturbances. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Astafyeva, E.; Heki, K.; Kiryushkin, V.; Afraimovich, E.; Shalimov, S. Two-mode long-distance propagation of coseismic ionosphere disturbances. J. Geophys. Res. Space Phys. 2009, 114. [Google Scholar] [CrossRef]
- Stangl, G.; Boudjada, M.Y.; Biagi, P.F.; Krauss, S.; Maier, A.; Schwingenschuh, K.; Al-Haddad, E.; Parrot, M.; Voller, W. Investigation of TEC and VLF space measurements associated to L’Aquila (Italy) earthquakes. Nat. Hazards Earth Syst. Sci. 2011, 11, 1019–1024. [Google Scholar] [CrossRef][Green Version]
- Kuo, C.; Huba, J.; Joyce, G.; Lee, L. Ionosphere plasma bubbles and density variations induced by pre-earthquake rock currents and associated surface charges. J. Geophys. Res. Space Phys. 2011, 116. [Google Scholar] [CrossRef]
- Kuo, C.; Lee, L.; Huba, J. An improved coupling model for the lithosphere-atmosphere-ionosphere system. J. Geophys. Res. Space Phys. 2014, 119, 3189–3205. [Google Scholar] [CrossRef]
- Hayakawa, M.; Hobara, Y.; Yasuda, Y.; Yamaguchi, H.; Ohta, K.; Izutsu, J.; Nakamura, T. Possible precursor to the March 11, 2011, Japan earthquake: Ionospheric perturbations as seen by subionospheric very low frequency/low frequency propagation. Ann. Geophys. 2012, 55. [Google Scholar] [CrossRef]
- Cohen, M.B.; Marshall, R. ELF/VLF recordings during the 11 March 2011 Japanese Tohoku earthquake. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Gutenberg, B.; Richter, C. Magnitude and energy of earthquakes. Nature 1955, 176, 795. [Google Scholar] [CrossRef]
- Komjathy, A.; Galvan, D.; Stephens, P.; Butala, M.; Akopian, V.; Wilson, B.; Verkhoglyadova, O.; Mannucci, A.; Hickey, M. Detecting ionospheric TEC perturbations caused by natural hazards using a global network of GPS receivers: The Tohoku case study. Earth Planets Space 2012, 64, 1287–1294. [Google Scholar] [CrossRef]
- Reuveni, Y.; Price, C.; Greenberg, E.; Shuval, A. Natural atmospheric noise statistics from VLF measurements in the eastern Mediterranean. Radio Sci. 2010, 45, 1–9. [Google Scholar] [CrossRef]
- Reuveni, Y.; Price, C.; Yair, Y.; Yaniv, R. The connection between meteor showers and VLF atmospheric noise signals. J. Atmos. Electr. 2011, 31, 23–36. [Google Scholar] [CrossRef]
- Arikan, F.; Shukurov, S.; Tuna, H.; Arikan, O.; Gulyaeva, T. Performance of GPS slant total electron content and IRI-Plas-STEC for days with ionospheric disturbance. Geod. Geodyn. 2016, 7, 1–10. [Google Scholar] [CrossRef]
- Landa, V.; Reuveni, Y. Low-dimensional Convolutional Neural Network for Solar Flares GOES Time-series Classification. Astrophys. J. Suppl. Ser. 2022, 258, 12. [Google Scholar] [CrossRef]
- Su, X.; Yan, X.; Tsai, C.L. Linear regression. Wiley Interdiscip. Rev. Comput. Stat. 2012, 4, 275–294. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Wang, L. Support Vector Machines: Theory and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005; Volume 177. [Google Scholar]
- Krogh, A. What are artificial neural networks? Nat. Biotechnol. 2008, 26, 195–197. [Google Scholar] [CrossRef]
- Reuveni, Y.; Price, C. A new approach for monitoring the 27-day solar rotation using VLF radio signals on the Earth’s surface. J. Geophys. Res. Space Phys. 2009, 114. [Google Scholar] [CrossRef]
- Hargreaves, J.K. The Solar-Terrestrial Environment: An Introduction to Geospace-the Science of the Terrestrial Upper Atmosphere, Ionosphere, and Magnetosphere; Cambridge University Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Reuveni, Y.; Bock, Y.; Tong, X.; Moore, A.W. Calibrating interferometric synthetic aperture radar (InSAR) images with regional GPS network atmosphere models. Geophys. J. Int. 2015, 202, 2106–2119. [Google Scholar] [CrossRef]
- Reuveni, Y.; Kedar, S.; Owen, S.E.; Moore, A.W.; Webb, F.H. Improving sub-daily strain estimates using GPS measurements. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Reuveni, Y.; Kedar, S.; Moore, A.; Webb, F. Analyzing slip events along the Cascadia margin using an improved subdaily GPS analysis strategy. Geophys. J. Int. 2014, 198, 1269–1278. [Google Scholar] [CrossRef]
- Elias, A.G. Trends in the F2 ionospheric layer due to long-term variations in the Earth’s magnetic field. J. Atmos. Sol. Terr. Phys. 2009, 71, 1602–1609. [Google Scholar] [CrossRef]
- Dudeney, J. The accuracy of simple methods for determining the height of the maximum electron concentration of the F2-layer from scaled ionospheric characteristics. J. Atmos. Terr. Phys. 1983, 45, 629–640. [Google Scholar] [CrossRef]
- Jin, S.; Luo, O.; Park, P. GPS observations of the ionospheric F2-layer behavior during the 20th November 2003 geomagnetic storm over South Korea. J. Geod. 2008, 82, 883–892. [Google Scholar] [CrossRef]
- Jakowski, N.; Heise, S.; Wehrenpfennig, A.; Schlüter, S.; Reimer, R. GPS/GLONASS-based TEC measurements as a contributor for space weather forecast. J. Atmos. Sol. Terr. Phys. 2002, 64, 729–735. [Google Scholar] [CrossRef]
- Erdogan, E.; Schmidt, M.; Seitz, F.; Durmaz, M. Near real-time estimation of ionosphere vertical total electron content from GNSS satellites using B-splines in a Kalman filter. In Annales Geophysicae; Copernicus GmbH: Göttingen, Germany, 2017; Volume 35, pp. 263–277. [Google Scholar]
- Leontiev, A.; Reuveni, Y. Combining Meteosat-10 satellite image data with GPS tropospheric path delays to estimate regional integrated water vapor (IWV) distribution. Atmos. Meas. Tech. 2017, 10, 537–548. [Google Scholar] [CrossRef]
- Leontiev, A.; Reuveni, Y. Augmenting GPS IWV estimations using spatio-temporal cloud distribution extracted from satellite data. Sci. Rep. 2018, 8, 14785. [Google Scholar] [CrossRef]
- Ziskin Ziv, S.; Alpert, P.; Reuveni, Y. Long-term variability and trends of precipitable water vapour derived from GPS tropospheric path delays over the Eastern Mediterranean. Int. J. Climatol. 2021, 41, 6433–6454. [Google Scholar] [CrossRef]
- Ziv, S.Z.; Yair, Y.; Alpert, P.; Uzan, L.; Reuveni, Y. The diurnal variability of precipitable water vapor derived from GPS tropospheric path delays over the Eastern Mediterranean. Atmos. Res. 2021, 249, 105307. [Google Scholar]
- Lynn, B.; Yair, Y.; Levi, Y.; Ziv, S.Z.; Reuveni, Y.; Khain, A. Impacts of Non-Local versus Local Moisture Sources on a Heavy (and Deadly) Rain Event in Israel. Atmosphere 2021, 12, 855. [Google Scholar] [CrossRef]
- Leontiev, A.; Rostkier-Edelstein, D.; Reuveni, Y. On the potential of improving WRF model forecasts by assimilation of high-resolution GPS-derived water-vapor maps augmented with METEOSAT-11 data. Remote Sens. 2020, 13, 96. [Google Scholar] [CrossRef]
- Zhang, B. Three methods to retrieve slant total electron content measurements from ground-based GPS receivers and performance assessment. Radio Sci. 2016, 51, 972–988. [Google Scholar] [CrossRef]
- Van Dierendonck, A.; Hua, Q.; Fenton, P.; Klobuchar, J. Commercial ionospheric scintillation monitoring receiver development and test results. In Proceedings of the 52nd Annual Meeting of The Institute of Navigation (1996), Cambridge, MA, USA, 19–21 June 1996; pp. 573–582. [Google Scholar]
- Freund, F. Toward a unified solid state theory for pre-earthquake signals. Acta Geophys. 2010, 58, 719–766. [Google Scholar] [CrossRef]
- He, L.; Heki, K. Ionospheric anomalies immediately before Mw7.0–8.0 earthquakes. J. Geophys. Res. Space Phys. 2017, 122, 8659–8678. [Google Scholar] [CrossRef]
- Kelley, M.C.; Swartz, W.E.; Heki, K. Apparent ionospheric total electron content variations prior to major earthquakes due to electric fields created by tectonic stresses. J. Geophys. Res. Space Phys. 2017, 122, 6689–6695. [Google Scholar] [CrossRef]
- Heki, K.; Enomoto, Y. Mw dependence of the preseismic ionospheric electron enhancements. J. Geophys. Res. Space Phys. 2015, 120, 7006–7020. [Google Scholar] [CrossRef]
- Cervantes, J.; Garcia-Lamont, F.; Rodríguez-Mazahua, L.; Lopez, A. A comprehensive survey on support vector machine classification: Applications, challenges and trends. Neurocomputing 2020, 408, 189–215. [Google Scholar] [CrossRef]
- Unar, S.; Wang, X.; Zhang, C. Visual and textual information fusion using Kernel method for content based image retrieval. Inf. Fusion 2018, 44, 176–187. [Google Scholar] [CrossRef]
- Xue, H.; Xu, H.; Chen, X.; Wang, Y. A primal perspective for indefinite kernel SVM problem. Front. Comput. Sci. 2020, 14, 349–363. [Google Scholar] [CrossRef]
- Zhou, X.; Jiang, P.; Wang, X. Recognition of control chart patterns using fuzzy SVM with a hybrid kernel function. J. Intell. Manuf. 2018, 29, 51–67. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.Y.; Zhang, H.; Xiong, L.D.; Lei, H.; Deng, S.H. Hyperparameter optimization for machine learning models based on Bayesian optimization. J. Electron. Sci. Technol. 2019, 17, 26–40. [Google Scholar]
- Snoek, J.; Larochelle, H.; Adams, R.P. Practical bayesian optimization of machine learning algorithms. Adv. Neural Inf. Process. Syst. 2012, 25, 2960–2968. [Google Scholar]
- Acerbi, L.; Ma, W.J. Practical Bayesian optimization for model fitting with Bayesian adaptive direct search. arXiv 2017, arXiv:1705.04405. [Google Scholar]
- Heki, K.; Enomoto, Y. Preseismic ionospheric electron enhancements revisited. J. Geophys. Res. Space Phys. 2013, 118, 6618–6626. [Google Scholar] [CrossRef]
- Li, J.; Jin, S. High-order ionospheric effects on electron density estimation from Fengyun-3C GPS radio occultation. In Annales Geophysicae; Copernicus GmbH: Göttingen, Germany, 2017; Volume 35, pp. 403–411. [Google Scholar]
- Li, Z.; Wang, N.; Hernández-Pajares, M.; Yuan, Y.; Krankowski, A.; Liu, A.; Zha, J.; García-Rigo, A.; Roma-Dollase, D.; Yang, H.; et al. IGS real-time service for global ionospheric total electron content modeling. J. Geod. 2020, 94, 32. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
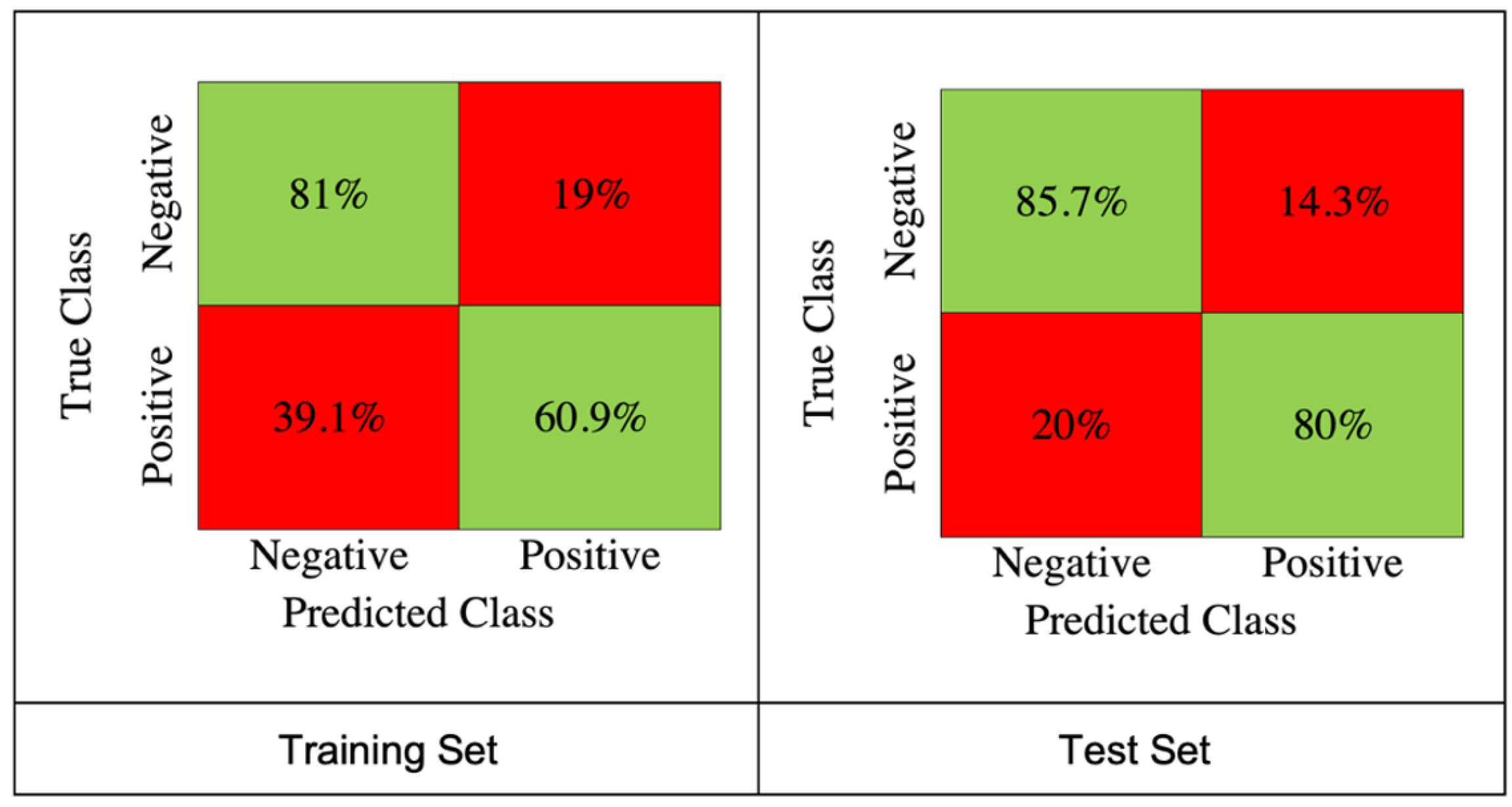
| Precision | Recall | HSS | Accuracy | TSS | |
|---|---|---|---|---|---|
| Training Set (n = 84) | 0.76 | 0.609 | 0.419 | 0.7095 | 0.419 |
| Test Set (n = 22) | 0.85 | 0.8 | 0.657 | 0.8285 | 0.657 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asaly, S.; Gottlieb, L.-A.; Inbar, N.; Reuveni, Y. Using Support Vector Machine (SVM) with GPS Ionospheric TEC Estimations to Potentially Predict Earthquake Events. Remote Sens. 2022, 14, 2822. https://doi.org/10.3390/rs14122822
Asaly S, Gottlieb L-A, Inbar N, Reuveni Y. Using Support Vector Machine (SVM) with GPS Ionospheric TEC Estimations to Potentially Predict Earthquake Events. Remote Sensing. 2022; 14(12):2822. https://doi.org/10.3390/rs14122822
Chicago/Turabian StyleAsaly, Saed, Lee-Ad Gottlieb, Nimrod Inbar, and Yuval Reuveni. 2022. "Using Support Vector Machine (SVM) with GPS Ionospheric TEC Estimations to Potentially Predict Earthquake Events" Remote Sensing 14, no. 12: 2822. https://doi.org/10.3390/rs14122822
APA StyleAsaly, S., Gottlieb, L.-A., Inbar, N., & Reuveni, Y. (2022). Using Support Vector Machine (SVM) with GPS Ionospheric TEC Estimations to Potentially Predict Earthquake Events. Remote Sensing, 14(12), 2822. https://doi.org/10.3390/rs14122822