
High Accuracy Motion Detection Algorithm via ISM Band FMCW Radar


Abstract
:1. Introduction
2. Principle of the Proposed Method
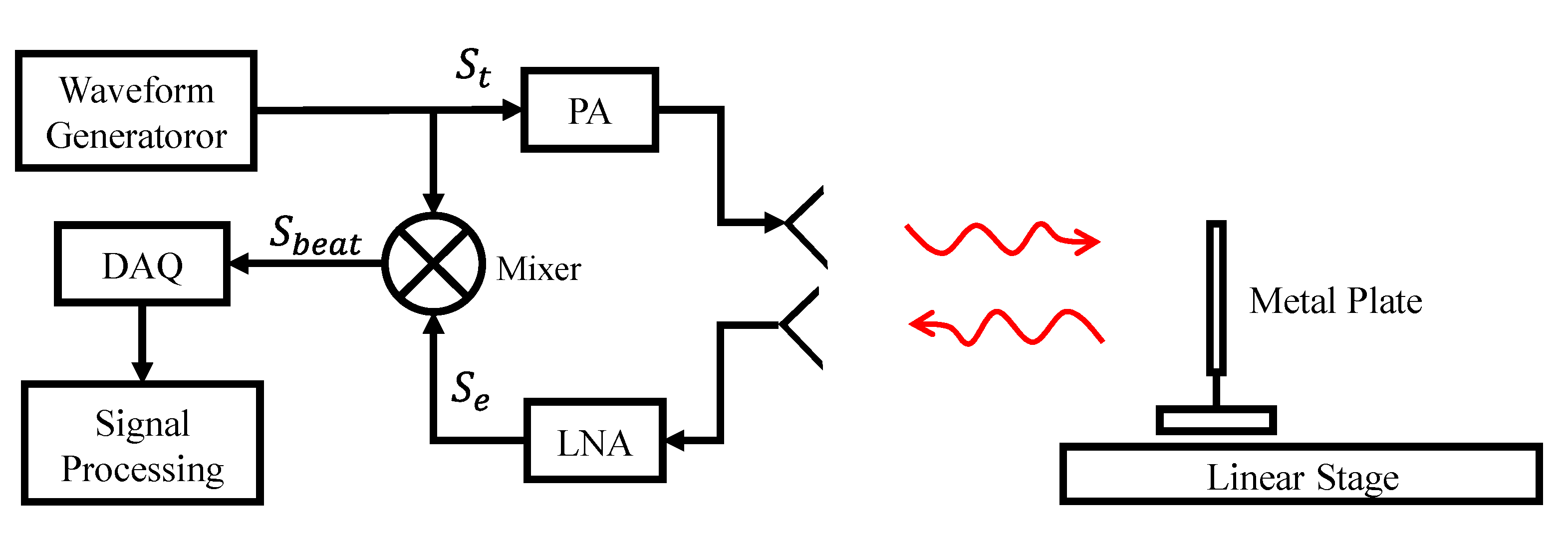
2.1. The Beat Signal of FMCW Radar
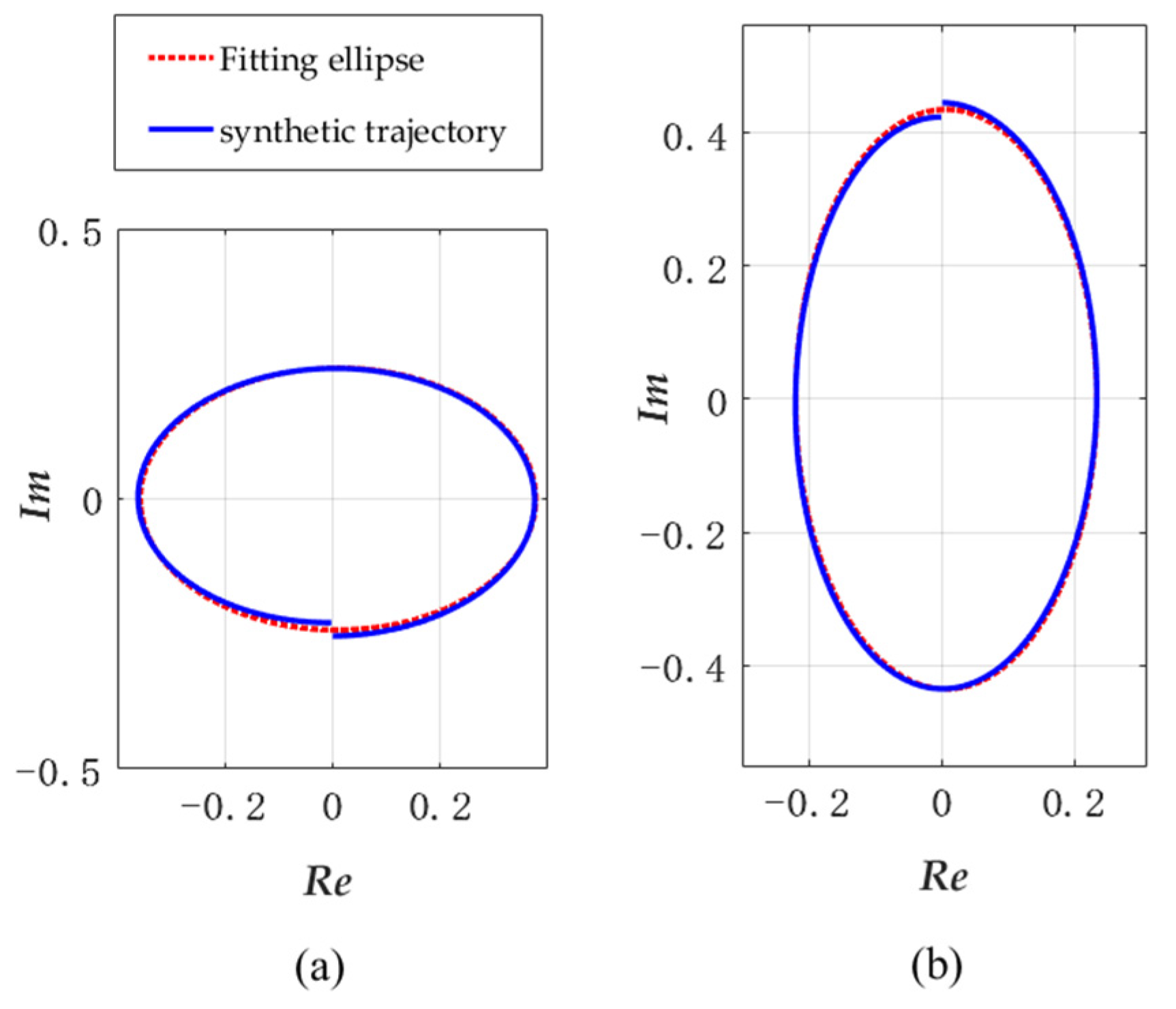
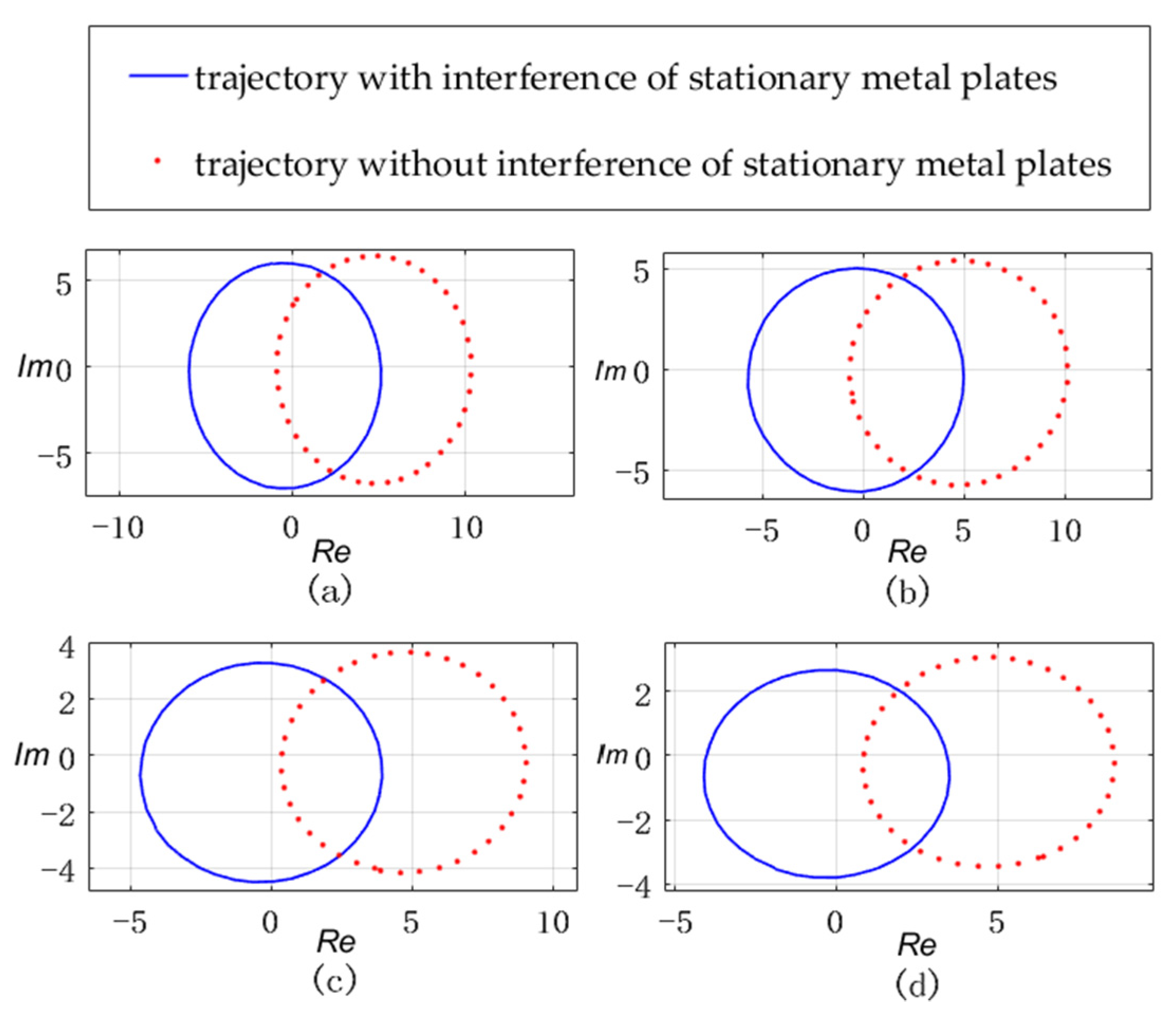
2.2. The Change Regularities of Real and Imaginary Components of the DFT of the Beat Signal
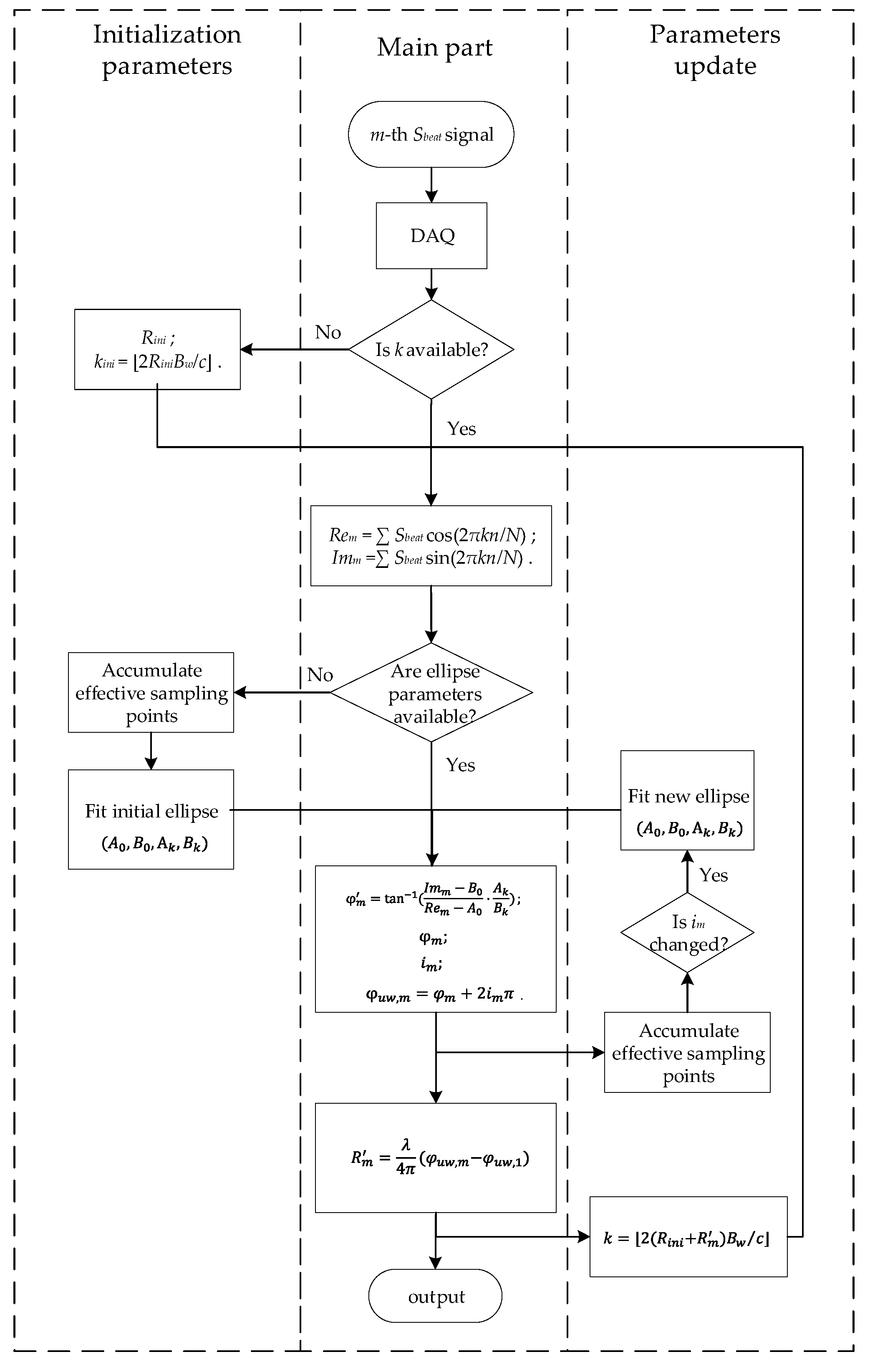
2.3. Principle of Motion Measurement
3. Measurement Results
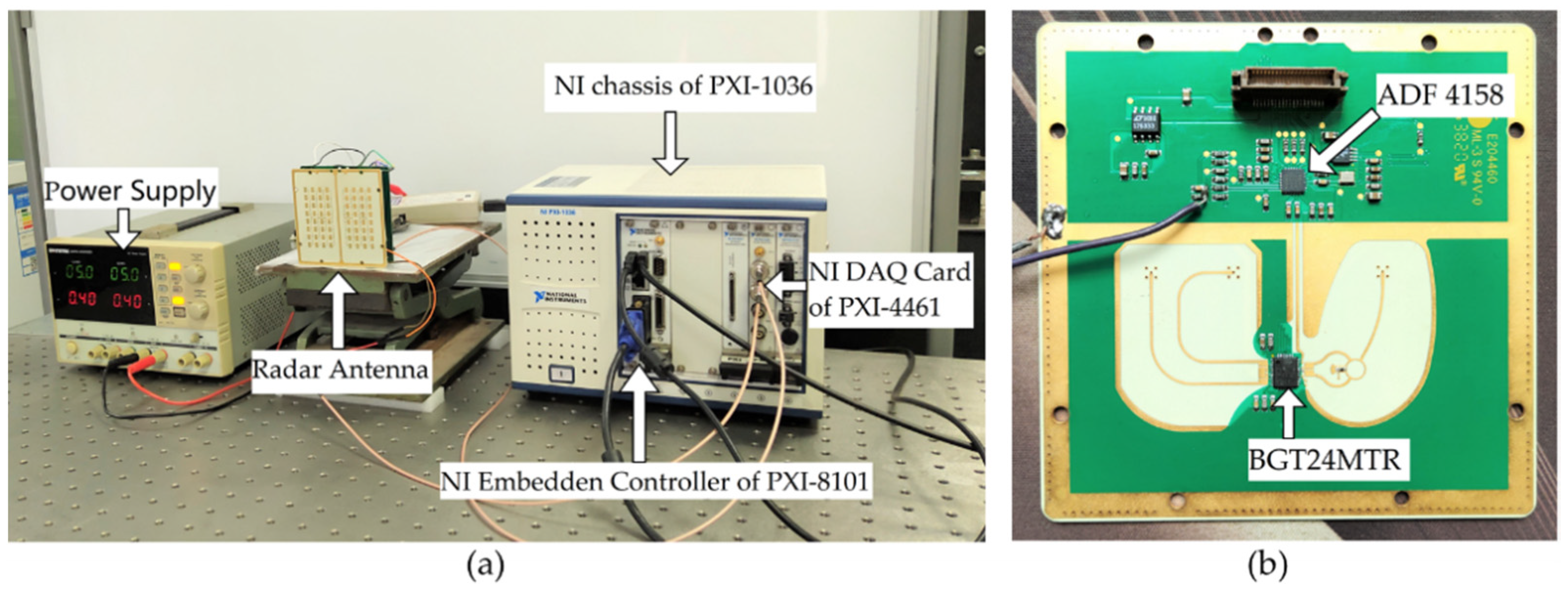
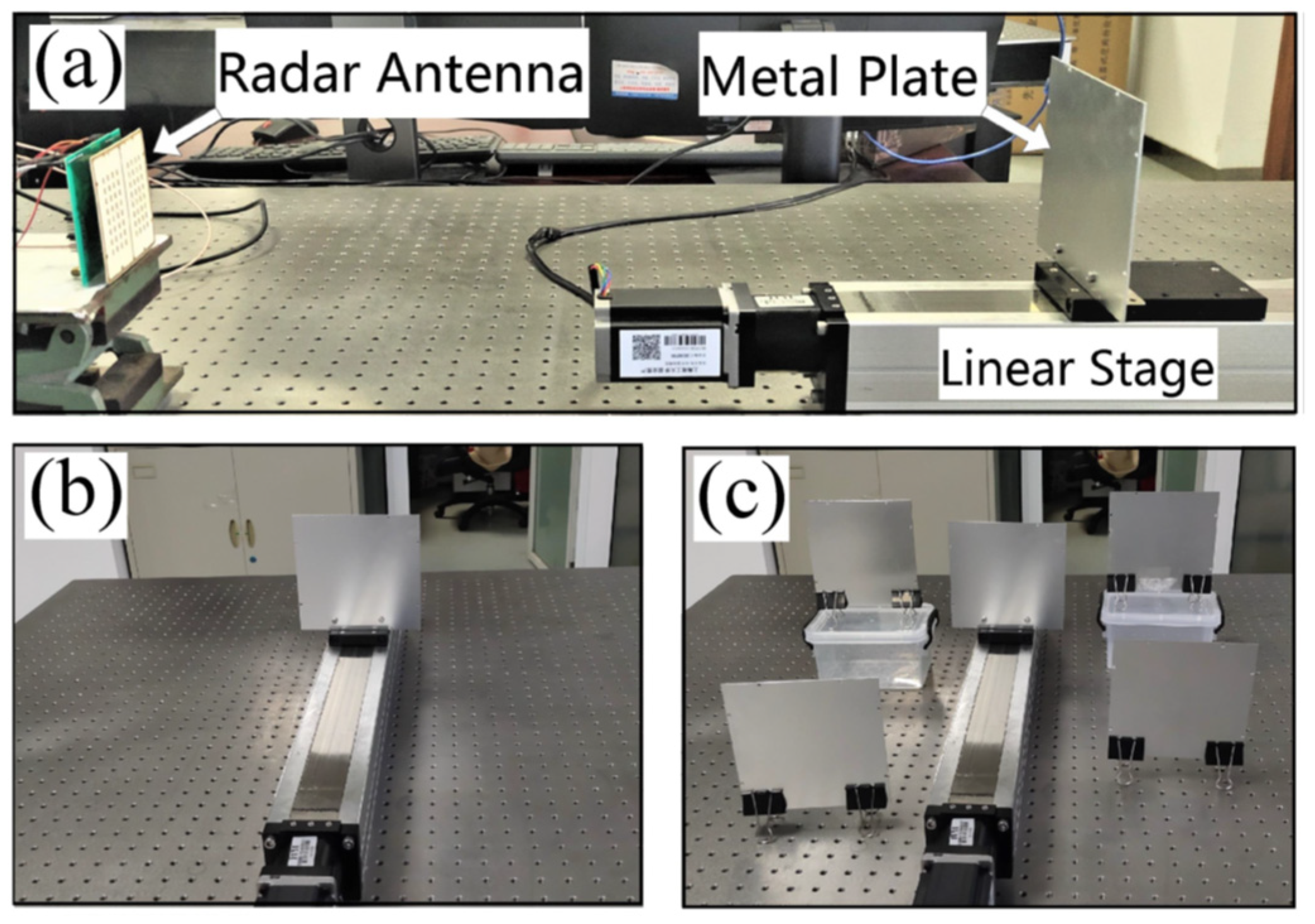
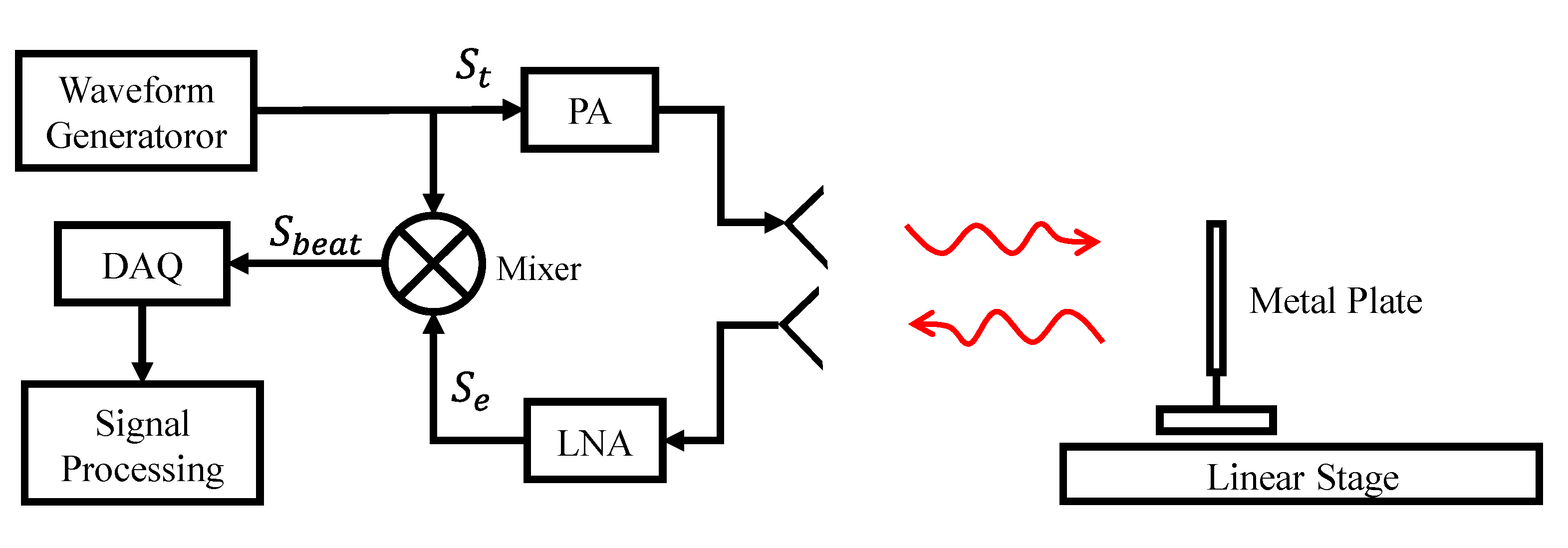
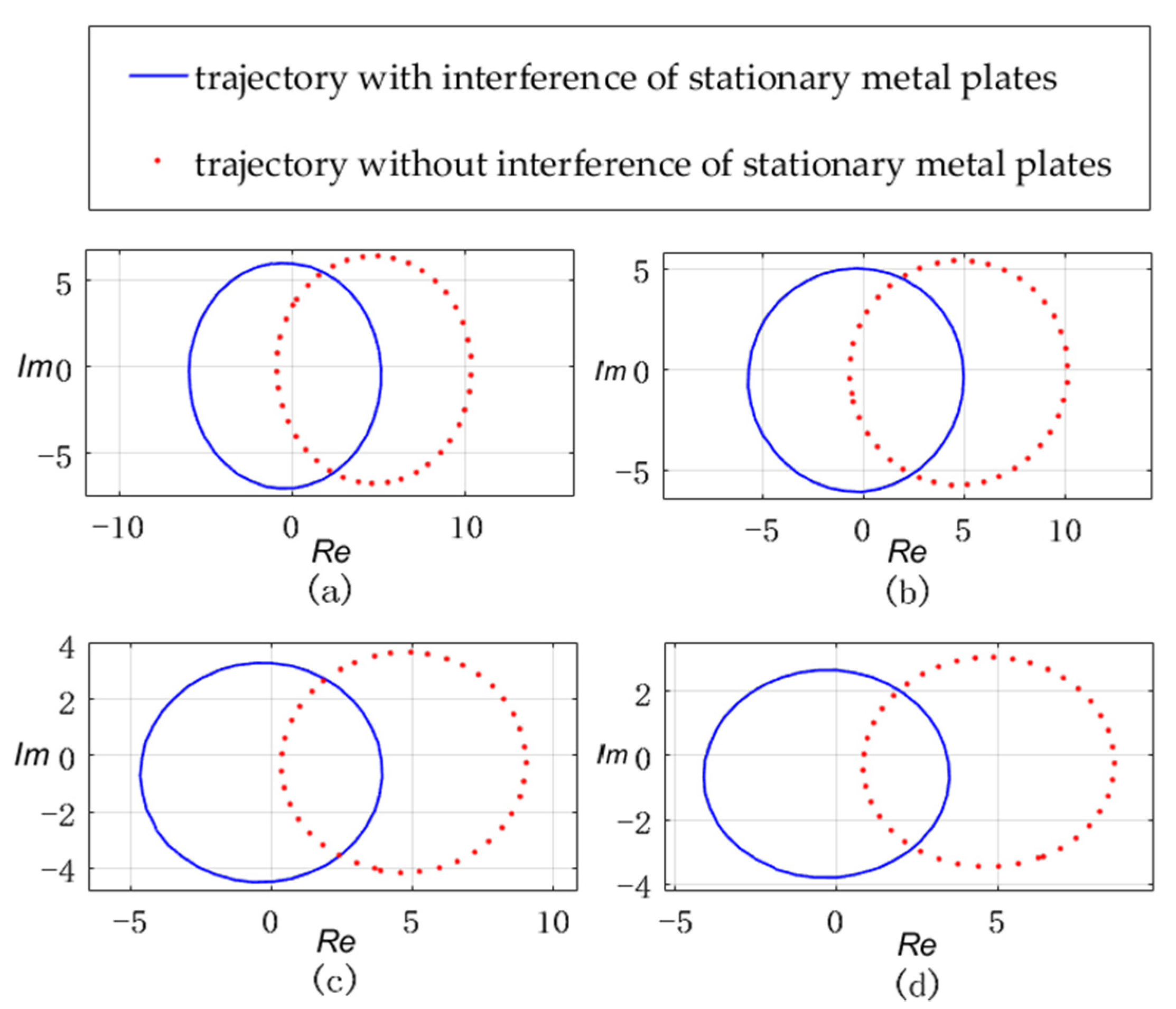
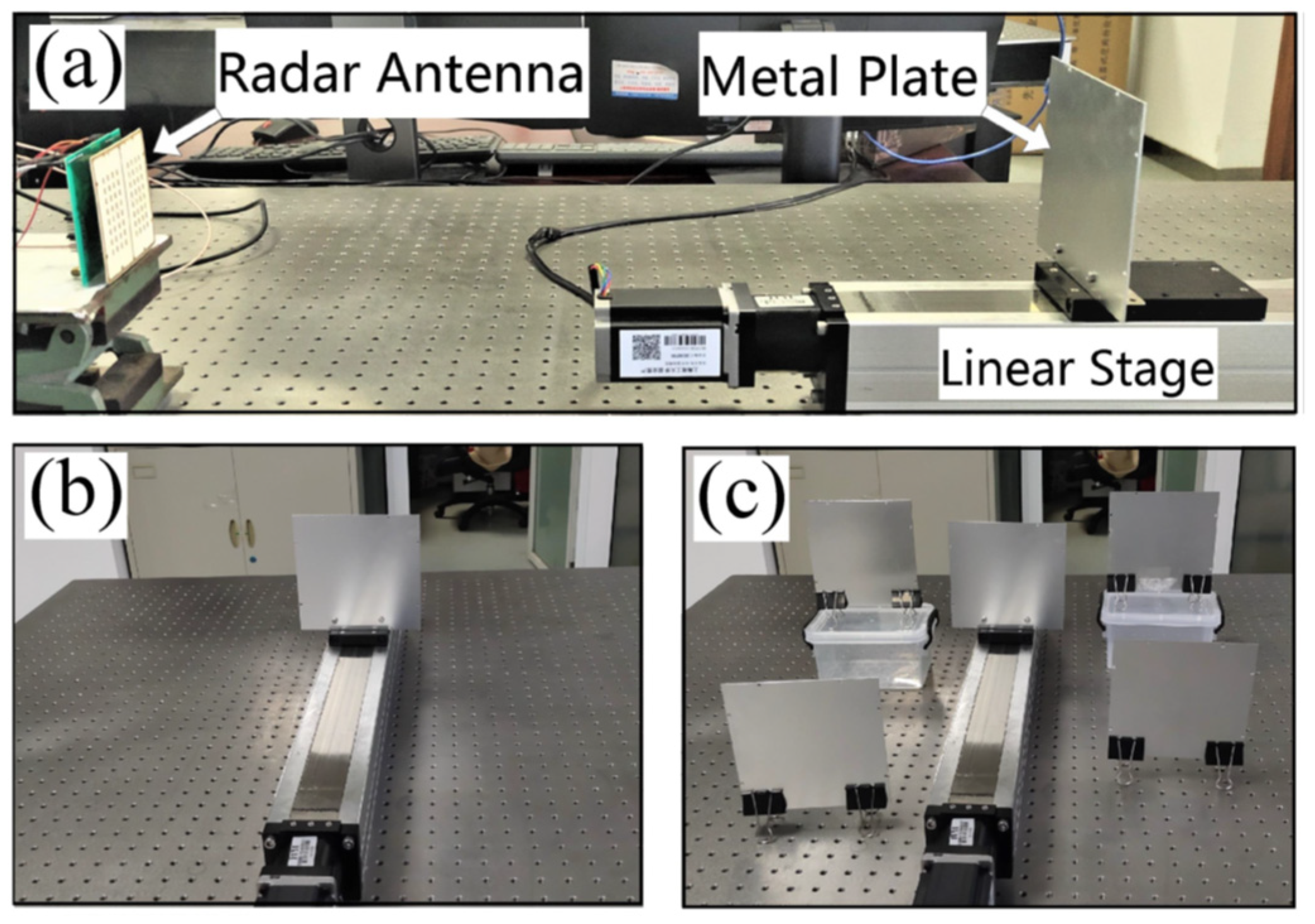
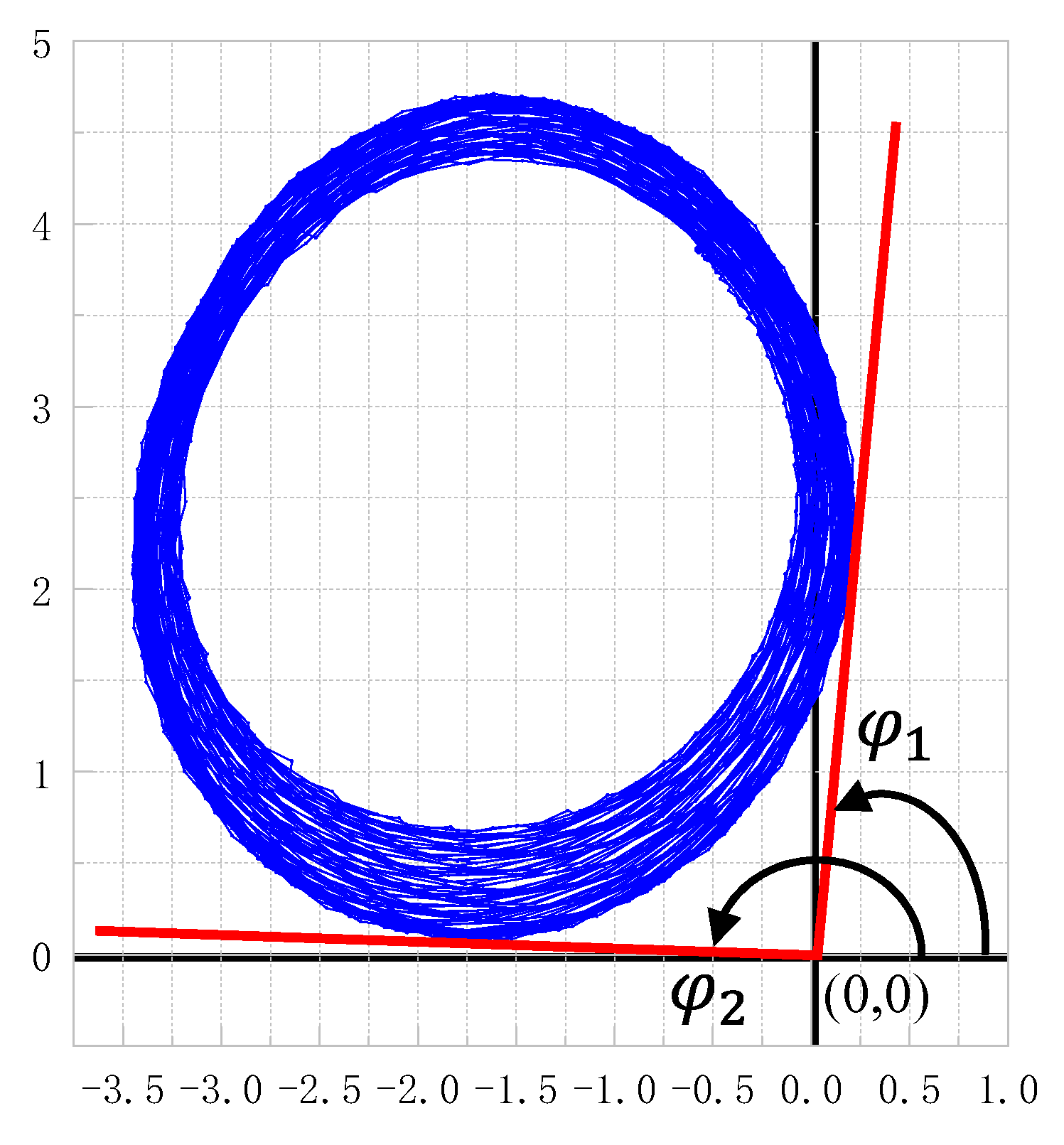
3.1. Measurement Setup and the Shape of Trajectories
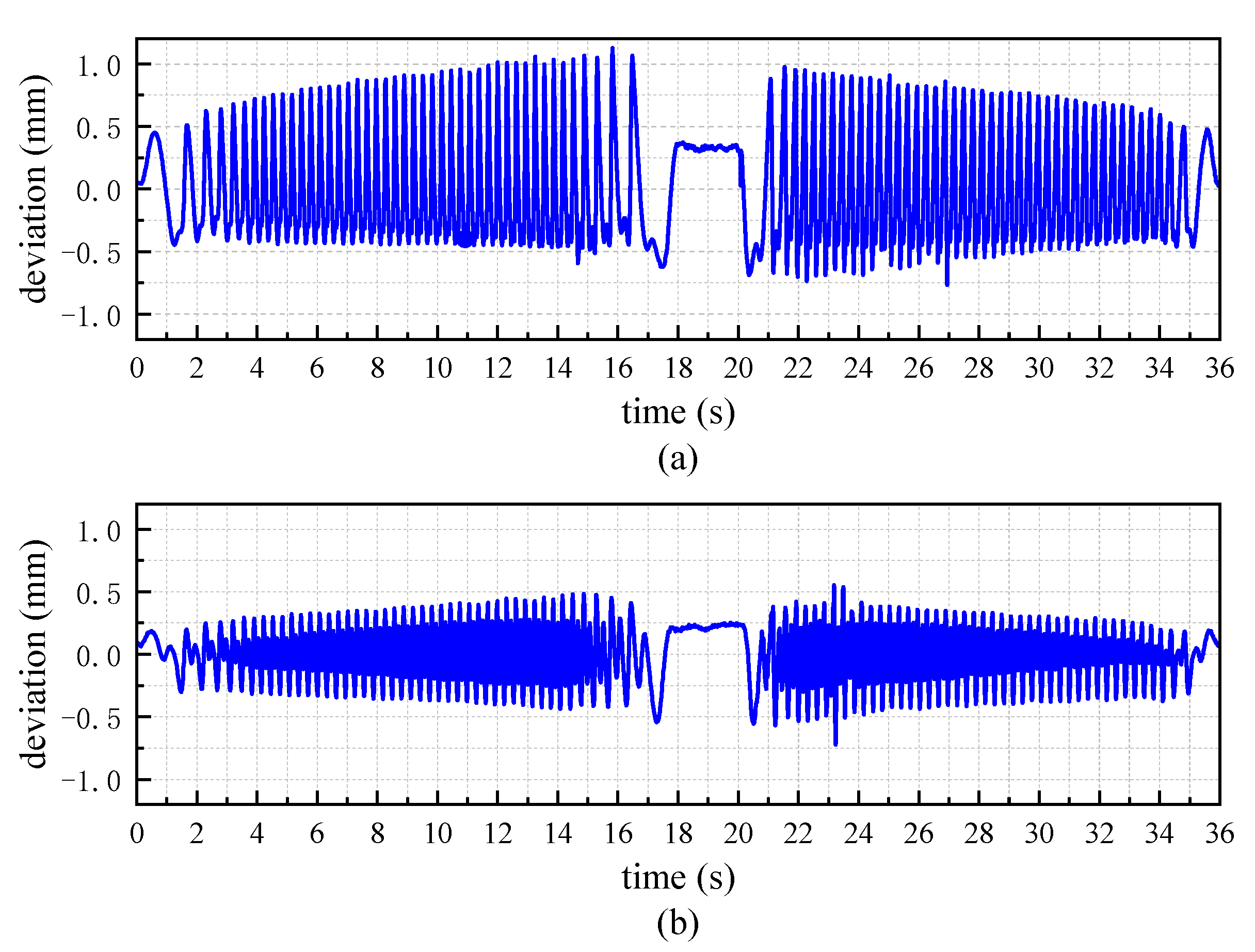
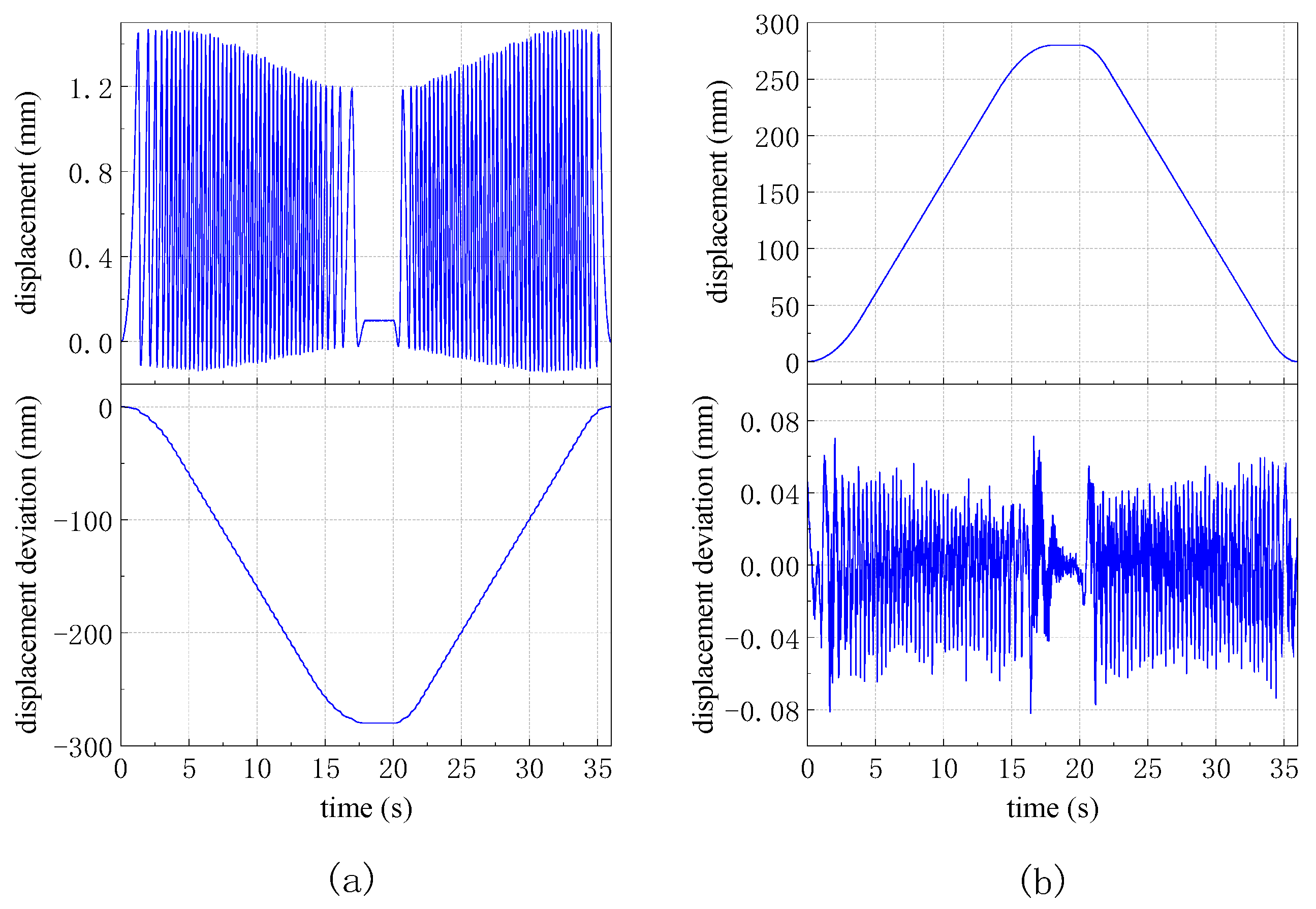
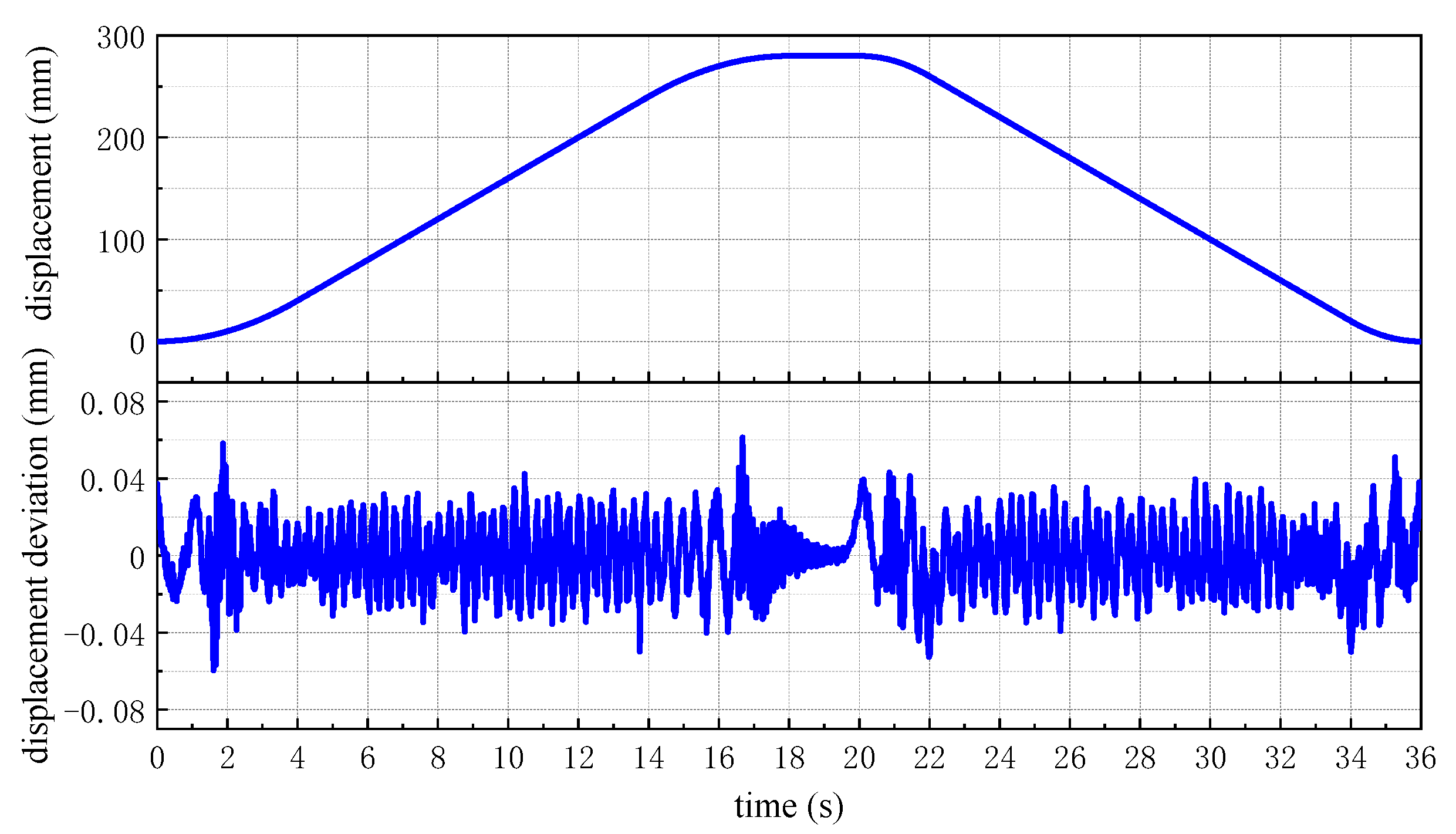
3.2. Motion Measurement
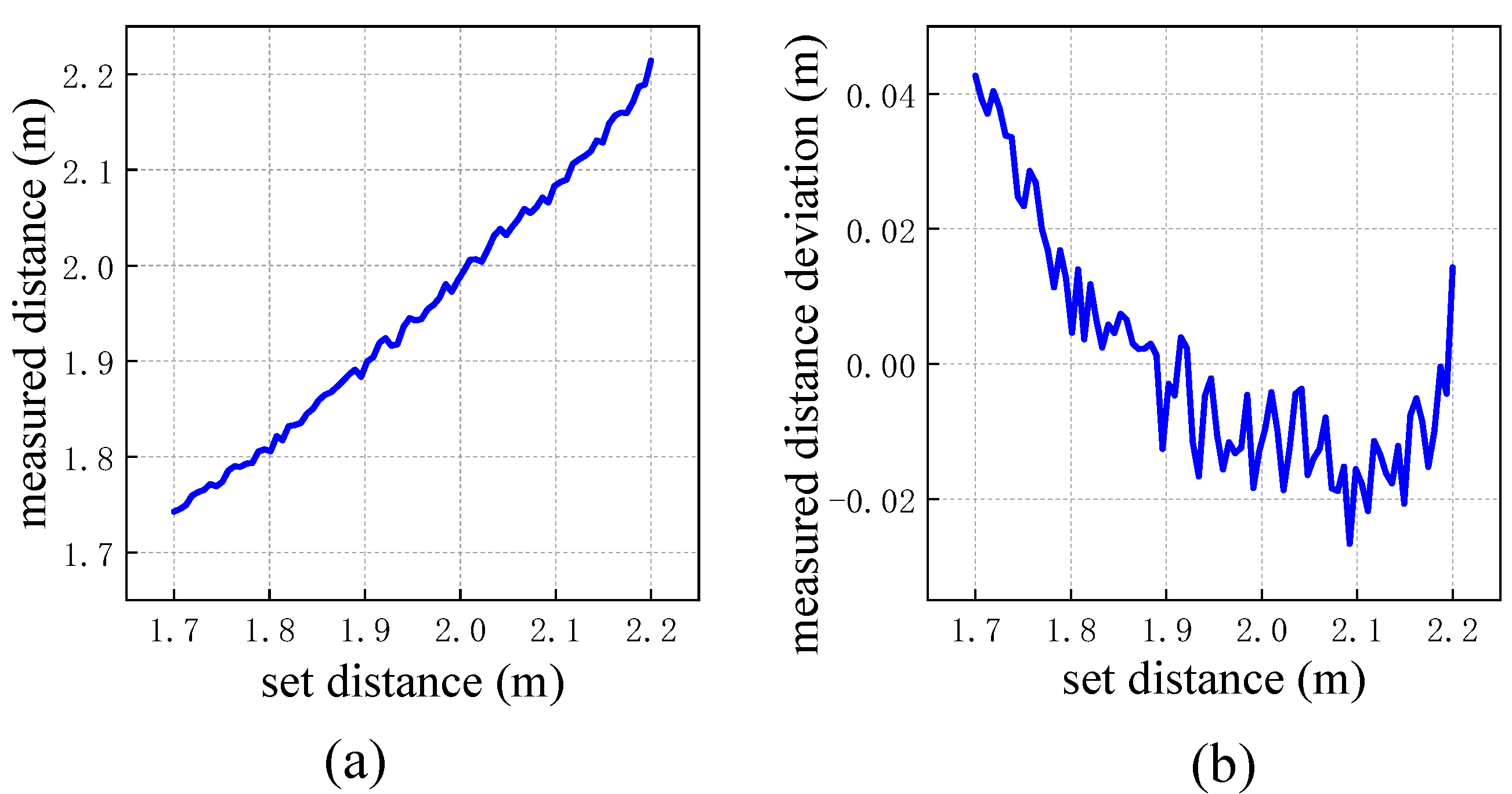
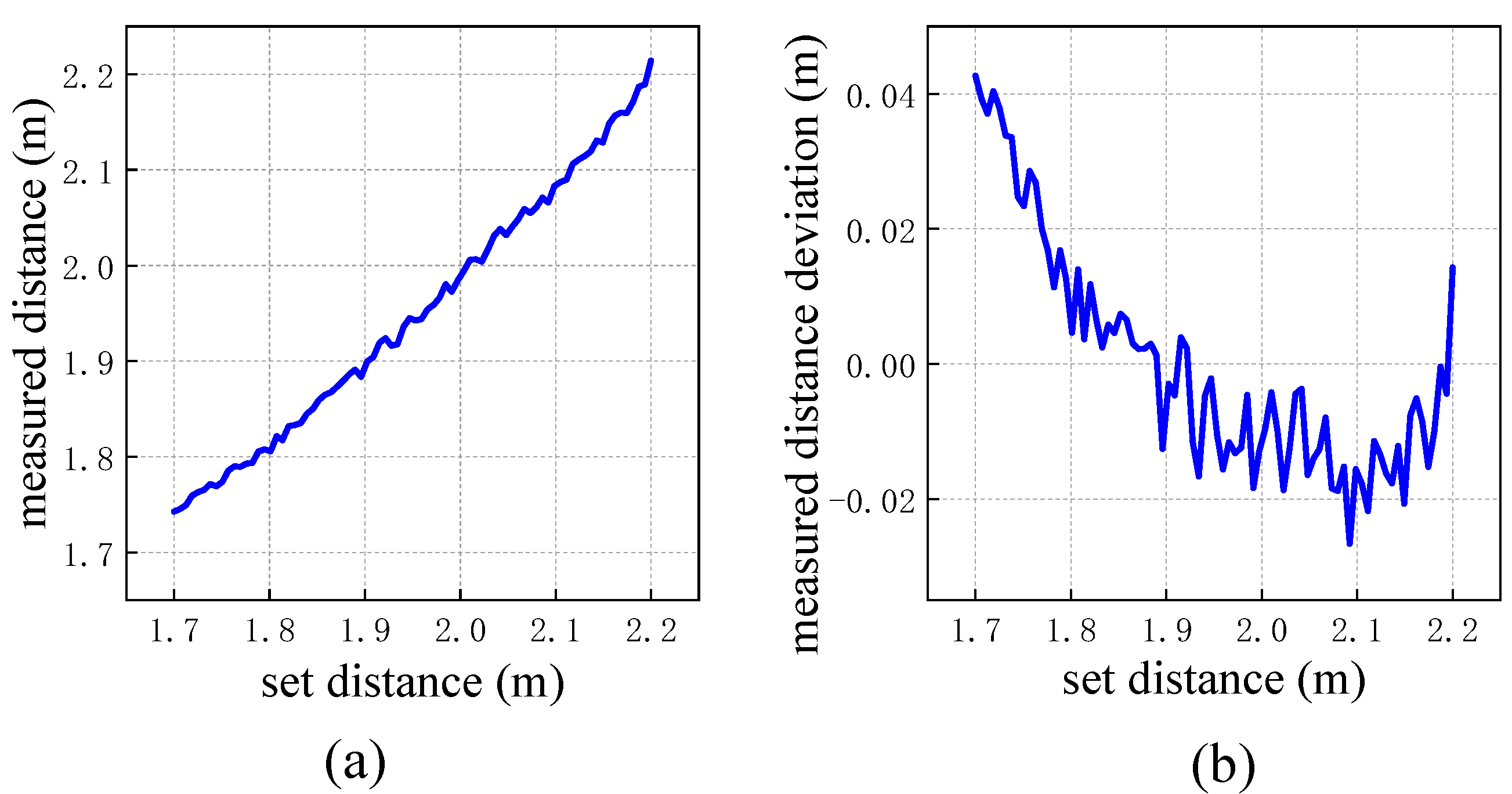
3.3. Distance Measurement
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- (1)
- The fitting of the initial ellipse
- (2)
- The fitting of subsequent ellipse
- (3)
- Restriction on the number of effective sampling points
- (4)
- Ellipse fitting algorithm
Appendix B
References
- Zhe, T.; Huang, L.; Wu, Q.; Zhang, J.; Pei, C.; Li, L. Inter-Vehicle Distance Estimation Method Based on Monocular Vision Using 3D Detection. IEEE Trans. Veh. Technol. 2020, 69, 4907–4919. [Google Scholar] [CrossRef]
- Chew, M.T.; Alam, F.; Legg, M.; Sen Gupta, G. Accurate Ultrasound Indoor Localization Using Spring-Relaxation Technique. Electronics 2021, 10, 1290. [Google Scholar] [CrossRef]
- Ma, L.F.; Li, Y.; Li, J.; Wang, C.; Wang, R.S.; Chapman, M.A. Mobile Laser Scanned Point-Clouds for Road Object Detection and Extraction: A Review. Remote Sens. 2018, 10, 1531. [Google Scholar] [CrossRef] [Green Version]
- Arab, H.; Dufour, S.; Moldovan, E.; Akyel, C.; Tatu, S.O. A 77-GHz Six-Port Sensor for Accurate Near-Field Displacement and Doppler Measurements. Sensors 2018, 18, 2565. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, H.; Kim, B.H.; Park, J.K.; Yook, J.G. A Novel Vital-Sign Sensing Algorithm for Multiple Subjects Based on 24-GHz FMCW Doppler radar. Remote Sens. 2019, 11, 1237. [Google Scholar] [CrossRef] [Green Version]
- Duan, Z.; Liang, J. Non-Contact Detection of Vital Signs Using a UWB Radar Sensor. IEEE Access 2019, 7, 36888–36895. [Google Scholar] [CrossRef]
- Piotrowsky, L.; Jaeschke, T.; Kueppers, S.; Siska, J.; Pohl, N. Enabling High Accuracy Distance Measurements with FMCW Radar Sensors. IEEE Trans. Microw. Theory Tech. 2019, 67, 5360–5371. [Google Scholar] [CrossRef]
- Wang, G.C.; Gu, C.Z.; Inoue, T.; Li, C.Z. A Hybrid FMCW-Interferometry Radar for Indoor Precise Positioning and Versatile Life Activity Monitoring. IEEE Trans. Microw. Theory Tech. 2014, 62, 2812–2822. [Google Scholar] [CrossRef]
- Anghel, A.; Vasile, G.; Cacoveanu, R.; Ioana, C.; Ciochina, S. Short-Range Wideband FMCW Radar for Millimetric Dis-placement Measurements. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5633–5642. [Google Scholar] [CrossRef] [Green Version]
- Bredendiek, C.; Pohl, N.; Jaeschke, T.; Thomas, S.; Aufinger, K.; Bilgic, A. A 24GHz Wideband Single-Channel SiGe Bipolar Transceiver Chip for Monostatic FMCW Radar Systems. In Proceedings of the 15th European Microwave Week—Space for Microwaves Conference Proceedings, Amsterdam, The Netherlands, 28 October–2 November 2012; pp. 309–312. [Google Scholar]
- Agrez, D. Weighted multipoint interpolated DFT to improve amplitude estimation of multifrequency signal. IEEE Trans. In-strum. Meas. 2002, 51, 287–292. [Google Scholar] [CrossRef]
- Guoqing, Q. High accuracy range estimation of FMCW level radar based on the phase of the zero-padded FFT. In Proceedings of the 7th International Conference on Signal Processing, Beijing, China, 31 August–4 September 2004; pp. 2078–2081. [Google Scholar]
- Jaeschke, T.; Bredendiek, C.; Kuppers, S.; Pohl, N. High-Precision D-Band FMCW-Radar Sensor Based on a Wideband Si-Ge-Transceiver MMIC. IEEE Trans. Microw. Theory Tech. 2014, 62, 3582–3597. [Google Scholar] [CrossRef]
- Luo, J.F.; Xie, Z.J.; Xie, M. Interpolated DFT algorithms with zero padding for classic windows. Mech. Syst. Signal Proc. 2016, 70–71, 1011–1025. [Google Scholar] [CrossRef]
- Rabiner, L.R.; Schafer, R.W.; Rader, C.M. The chirp z-transform algorithm and its application. Bell Syst. Tech. J. 1969, 48, 1249–1292. [Google Scholar] [CrossRef]
- Scherr, S.; Ayhan, S.; Fischbach, B.; Bhutani, A.; Pauli, M.; Zwick, T. An Efficient Frequency and Phase Estimation Algorithm with CRB Performance for FMCW Radar Applications. IEEE Trans. Instrum. Meas. 2015, 64, 1868–1875. [Google Scholar] [CrossRef]
- Scherr, S.; Goettel, B.; Ayhan, S.; Bhutani, A.; Pauli, M.; Winkler, W.; Scheytt, J.C.; Zwick, T. Miniaturized 122 GHz ISM Band FMCW Radar with Micrometer Accuracy. In Proceedings of the 12th European Radar Conference (EuRAD), Paris, France, 9–11 September 2015; pp. 277–280. [Google Scholar]
- Wang, S.Y.; Pohl, A.; Jaeschke, T.; Czaplik, M.; Kony, M.; Leonhardt, S.; Pohl, N. A Novel Ultra-Wideband 80 GHz FMCW Radar System for Contactless Monitoring of Vital Signs. In Proceedings of the 37th Annual International Conference of the IEEE-Engineering-in-Medicine-and-Biology-Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 4978–4981. [Google Scholar]
- Radio Regulations Articles. Available online: https://www.itu.int/dms_pub/itu-r/opb/reg/R-REG-RR-2020-ZPF-E.zip (accessed on 28 October 2021).
- Li, C.Z.; Lin, J.S. Random Body Movement Cancellation in Doppler radar Vital Sign Detection. IEEE Trans. Microw. Theory Tech. 2008, 56, 3143–3152. [Google Scholar] [CrossRef]
- Zhao, H.; Hong, H.; Miao, D.Y.; Li, Y.S.; Zhang, H.T.; Zhang, Y.M.; Li, C.Z.; Zhu, X.H. A Noncontact Breathing Disorder Recognition System Using 2.4-GHZ Digital-IF Doppler radar. IEEE J. Biomed. Health Inform. 2019, 23, 208–217. [Google Scholar] [CrossRef] [PubMed]
- Barbon, F.; Vinci, G.; Lindner, S.; Weigel, R.; Koelpin, A. A six-port interferometer based micrometer-accuracy displacement and vibration measurement radar. In Proceedings of the 2012 IEEE/MTT-S International Microwave Symposium—MTT 2012, Montreal, QC, Canada, 17–22 June 2012. [Google Scholar] [CrossRef]
- Schlegel, A.; Ellison, S.M.; Nanzer, J.A. A Microwave Sensor with Submillimeter Range Accuracy Using Spectrally Sparse Signals. IEEE Microw. Wirel. Compon. Lett. 2020, 30, 120–123. [Google Scholar] [CrossRef]
- Lindner, S.; Barbon, F.; Mann, S.; Vinci, G.; Weigel, R.; Koelpin, A. Dual Tone Approach for Unambiguous Six-Port Based Interferometric Distance Measurements. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (MTT 2013), Seattle, WA, USA, 2–7 June 2013. [Google Scholar] [CrossRef]
- An, S.N.; He, Z.S.; Li, J.G.; An, J.P.; Zirath, H. Micrometer Accuracy Phase Modulated Radar for Distance Measurement and Monitoring. IEEE Sens. J. 2020, 20, 2919–2927. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.00678 | 0.00003 | 1.47% | 1.06% |
| 0.01356 | 0.000014 | 0.34% | 0.25% |
| 0.02712 | 0.000326 | 4.01% | 2.88% |
| 0.04068 | 0.00004 | 0.33% | 0.24% |
| 0.43392 | 0.00174 | 1.34% | 0.96% |
| 0.915 | 0.026 | 9.47% | 6.82% |
| 2.45 | 0.1 | 13.61% | 9.80% |
| 5.8 | 0.15 | 8.62% | 6.21% |
| 24.125 | 0.25 | 3.45% | 2.49% |
| 61.25 | 0.5 | 2.72% | 1.96% |
| 122.5 | 1 | 2.72% | 1.96% |
| 245 | 2 | 2.72% | 1.96% |
| Item | Parameter |
|---|---|
| Radar modulation mode | FMCW sawtooth modulation |
| Center frequency | 24.075 GHz |
| Bandwidth | 0.15 GHz |
| Duration of a chirp | 4 ms |
| Transmitted power | 15 dBm |
| Size of metal plate | 15 cm × 15 cm |
| Resolution of linear stage | 0.01 mm |
| Time Periods (s) | 0–4 | 4–14 | 14–18 | 18–20 | 20–22 | 22–34 | 34–36 |
|---|---|---|---|---|---|---|---|
| State of motion | Uniform acceleration | Uniform velocity | Uniform deceleration | standstill | Uniform acceleration | Uniform velocity | Uniform deceleration |
| Ref. | Waveform | Frequency(GHz) | Bandwidth (GHz) | Accuracy (um) | Measured Distance (mm) | Time Complexity | ISM Band |
|---|---|---|---|---|---|---|---|
| [10] | FMCW | 24 | 8 | 250 | 3000 | O() | NO |
| [16] | FMCW | 24.3 | 1 | 5 | 50 | O() | NO |
| [22] | CW | 24 | Single tone | 0.5 | 0.01 | O(1) | YES |
| [24] | CW | 24 | Dual tone | 200 | 60 | O(1) | NO |
| [25] | Pulse | 2 | 0.45 | 530 | Static | O(N) | NO |
| [23] | Phase modulated | 80 | 2 | 7 | 20 | O(N) | NO |
| This study | FMCW | 24.074 | 0.15 | 87 | 280 | O(N) | YES |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, K.; Zhang, R.; Fang, Z. High Accuracy Motion Detection Algorithm via ISM Band FMCW Radar. Remote Sens. 2022, 14, 58. https://doi.org/10.3390/rs14010058
Qu K, Zhang R, Fang Z. High Accuracy Motion Detection Algorithm via ISM Band FMCW Radar. Remote Sensing. 2022; 14(1):58. https://doi.org/10.3390/rs14010058
Chicago/Turabian StyleQu, Kui, Rongfu Zhang, and Zhijun Fang. 2022. "High Accuracy Motion Detection Algorithm via ISM Band FMCW Radar" Remote Sensing 14, no. 1: 58. https://doi.org/10.3390/rs14010058
APA StyleQu, K., Zhang, R., & Fang, Z. (2022). High Accuracy Motion Detection Algorithm via ISM Band FMCW Radar. Remote Sensing, 14(1), 58. https://doi.org/10.3390/rs14010058