
Effects of Differences in Structure from Motion Software on Image Processing of Unmanned Aerial Vehicle Photography and Estimation of Crown Area and Tree Height in Forests


Abstract
1. Introduction
2. Materials and Methods
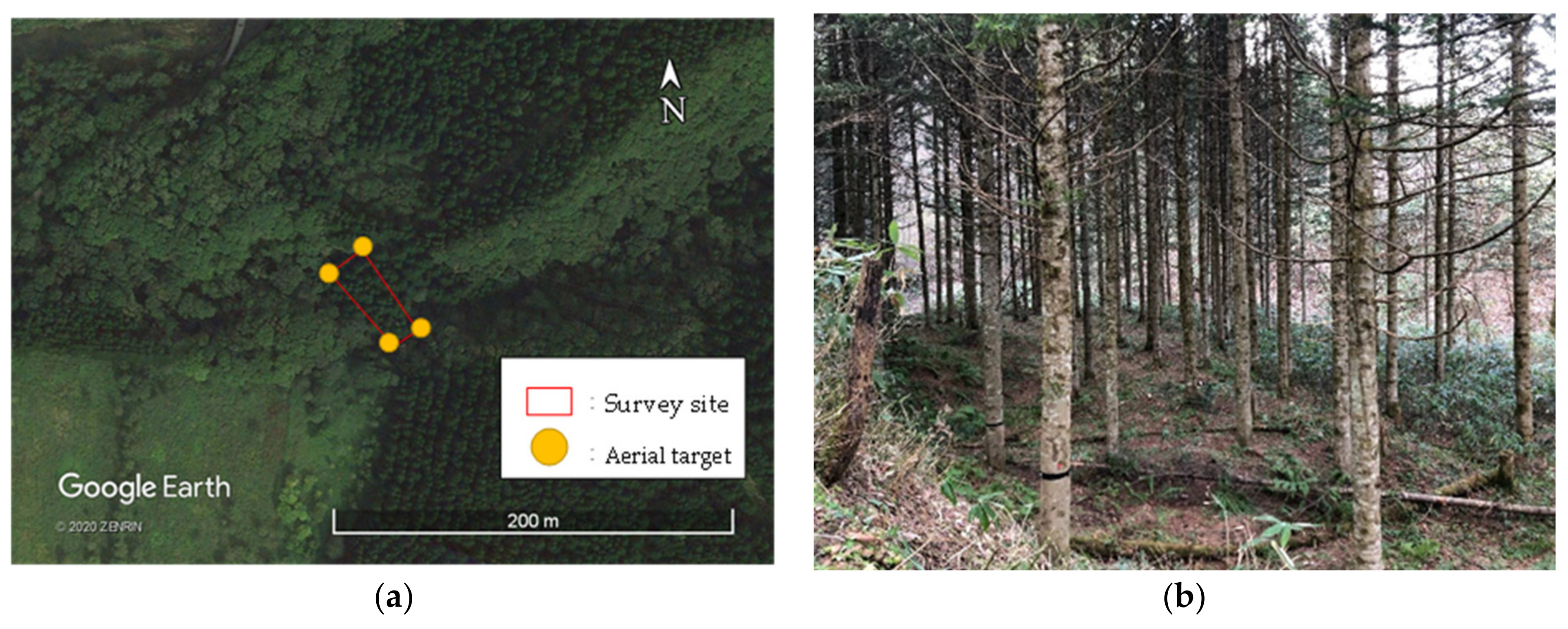
2.1. Survey Site
2.2. UAV Flight Conditions
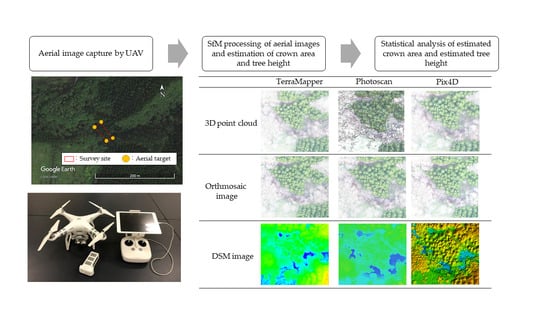
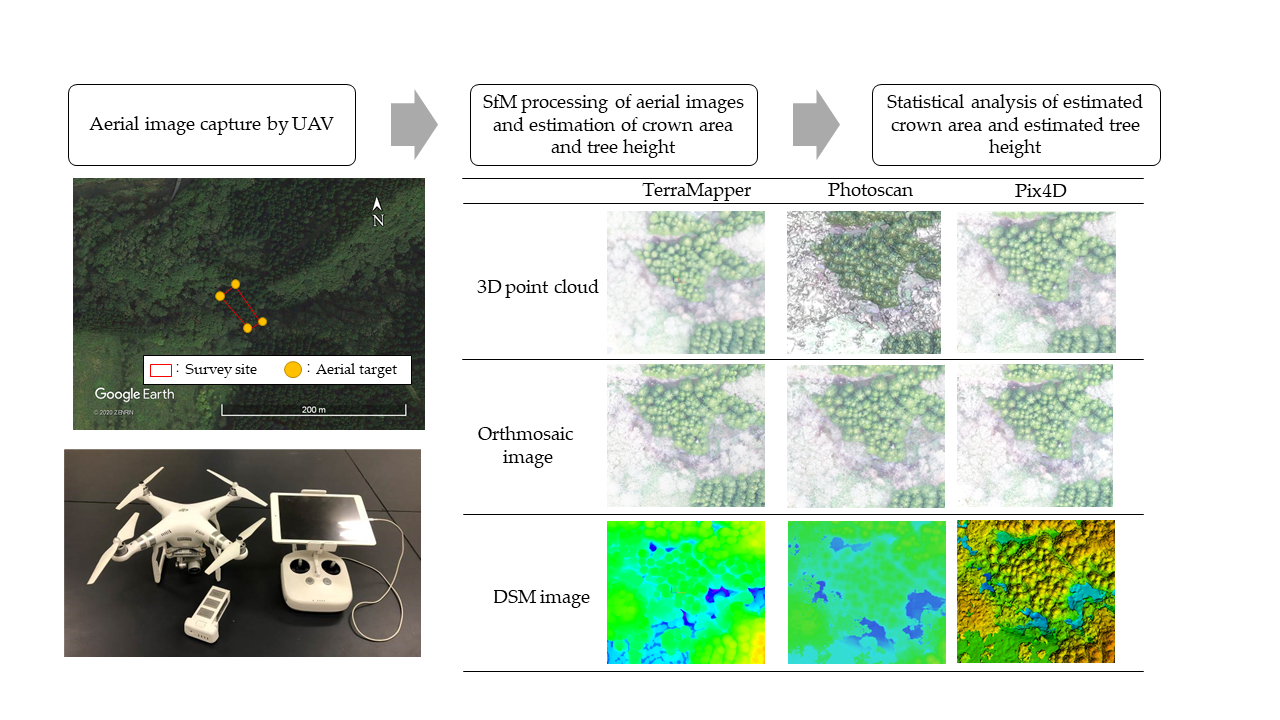
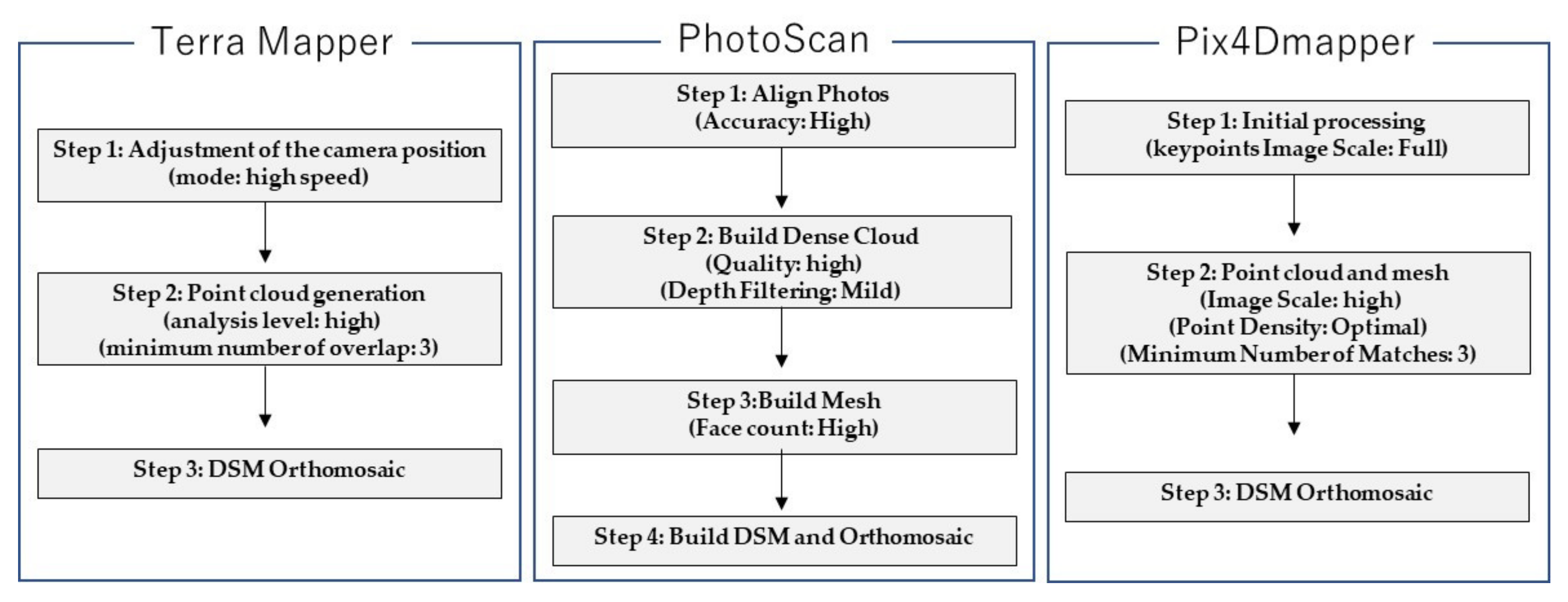
2.3. Processing of Aerial Images and Estimation Methods
2.4. Statistical Analyses
3. Results
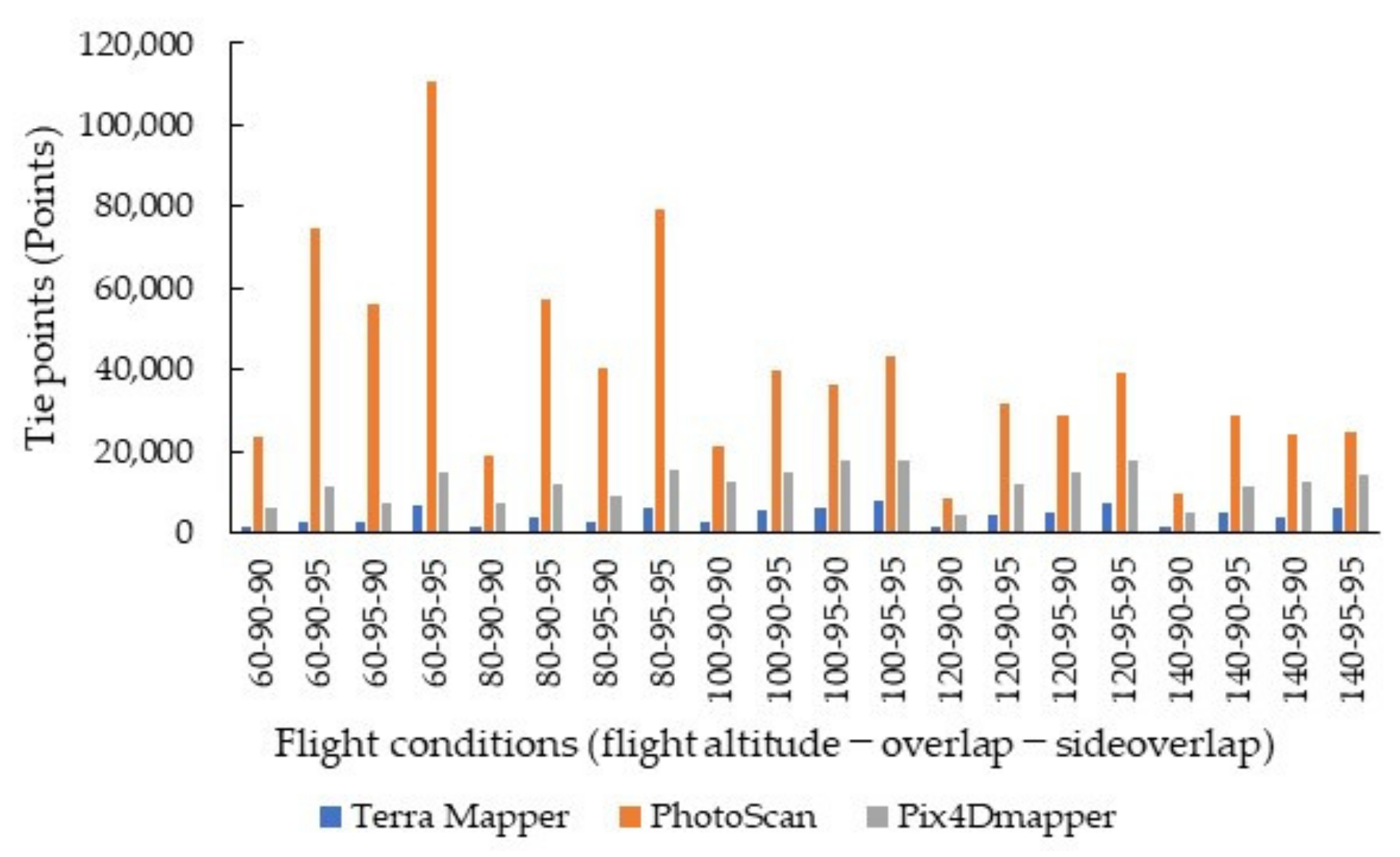
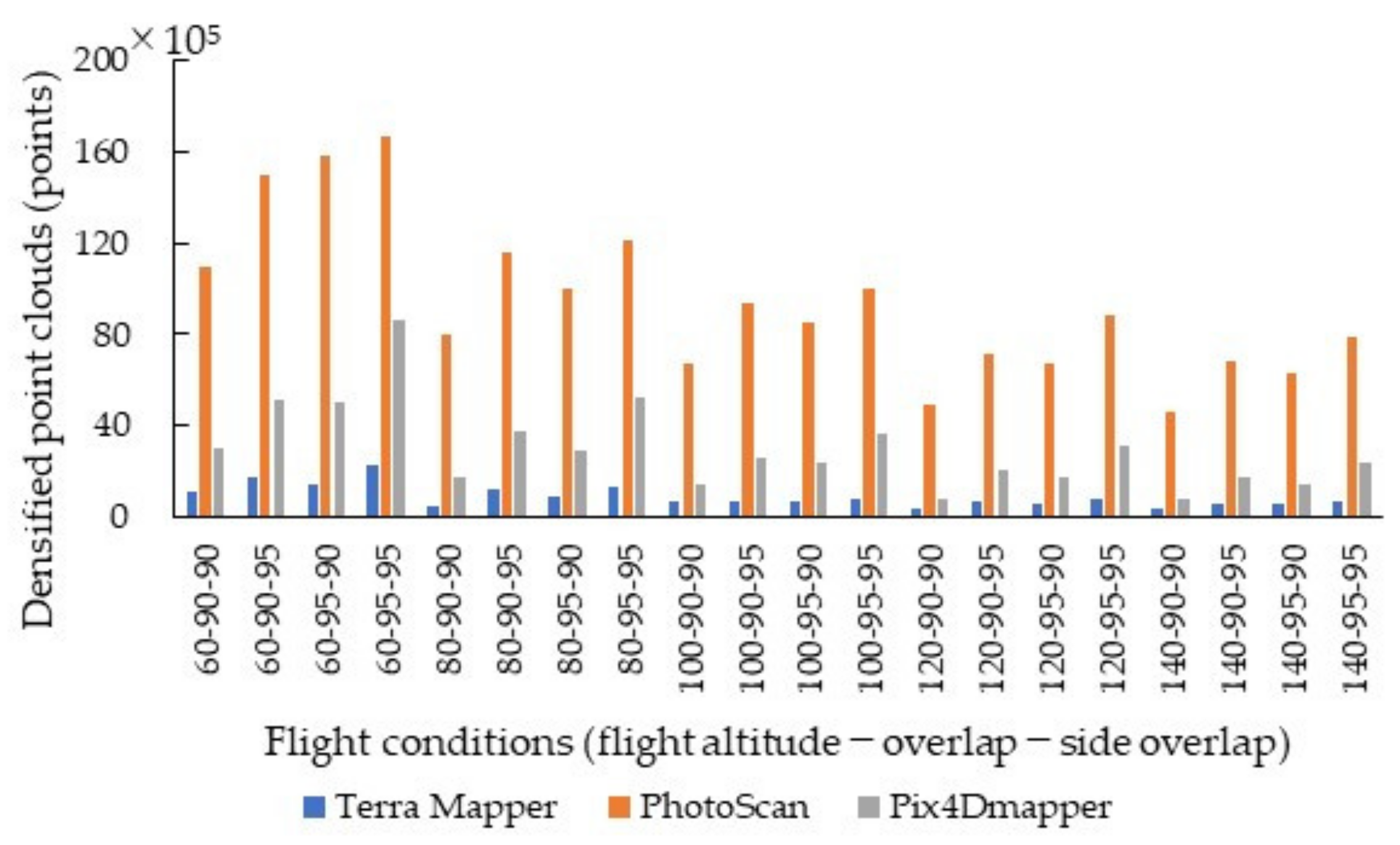
3.1. Image Processing by Each SfM Software
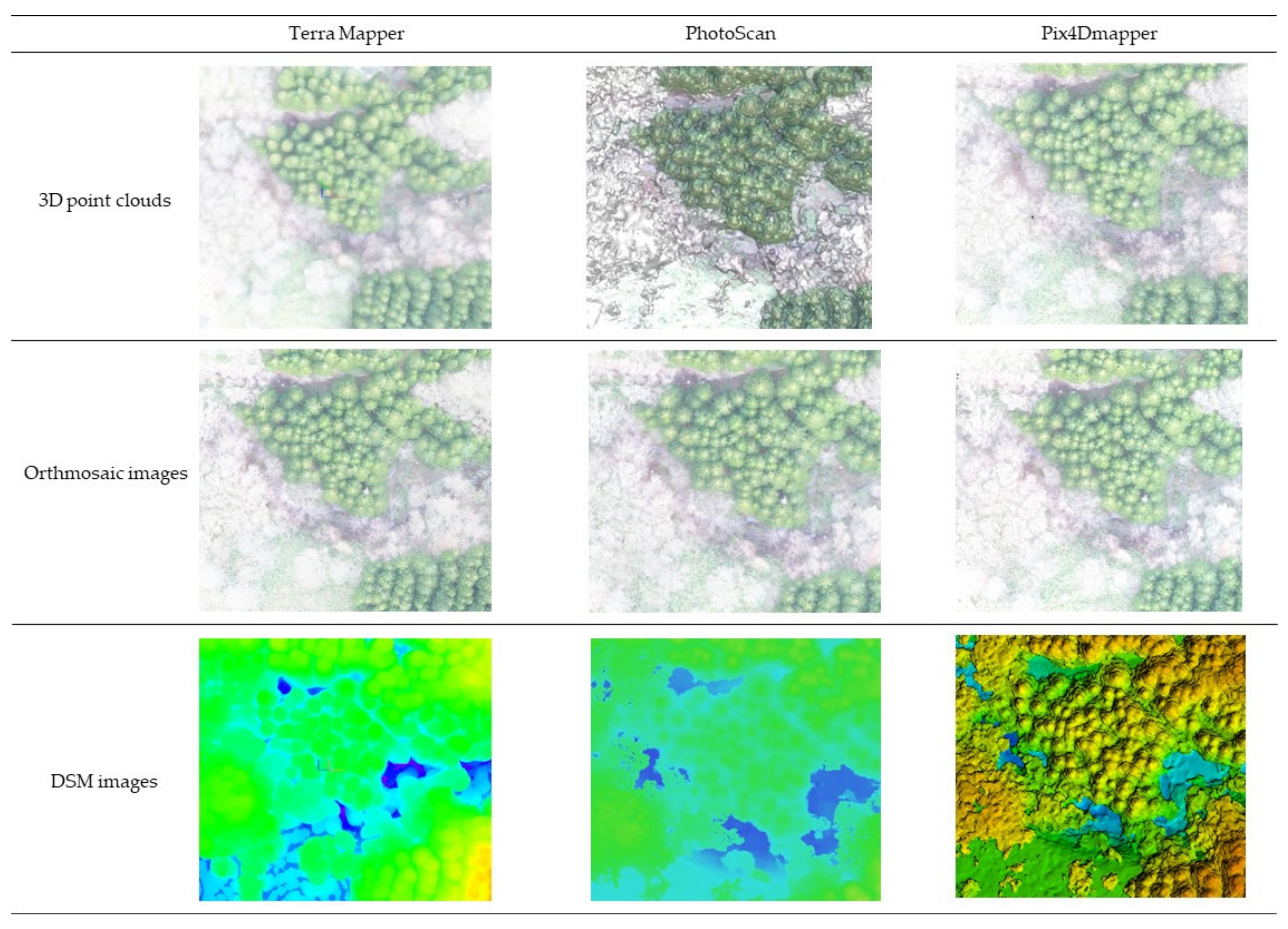
3.2. Comparison of Images Generated by Each SfM Software
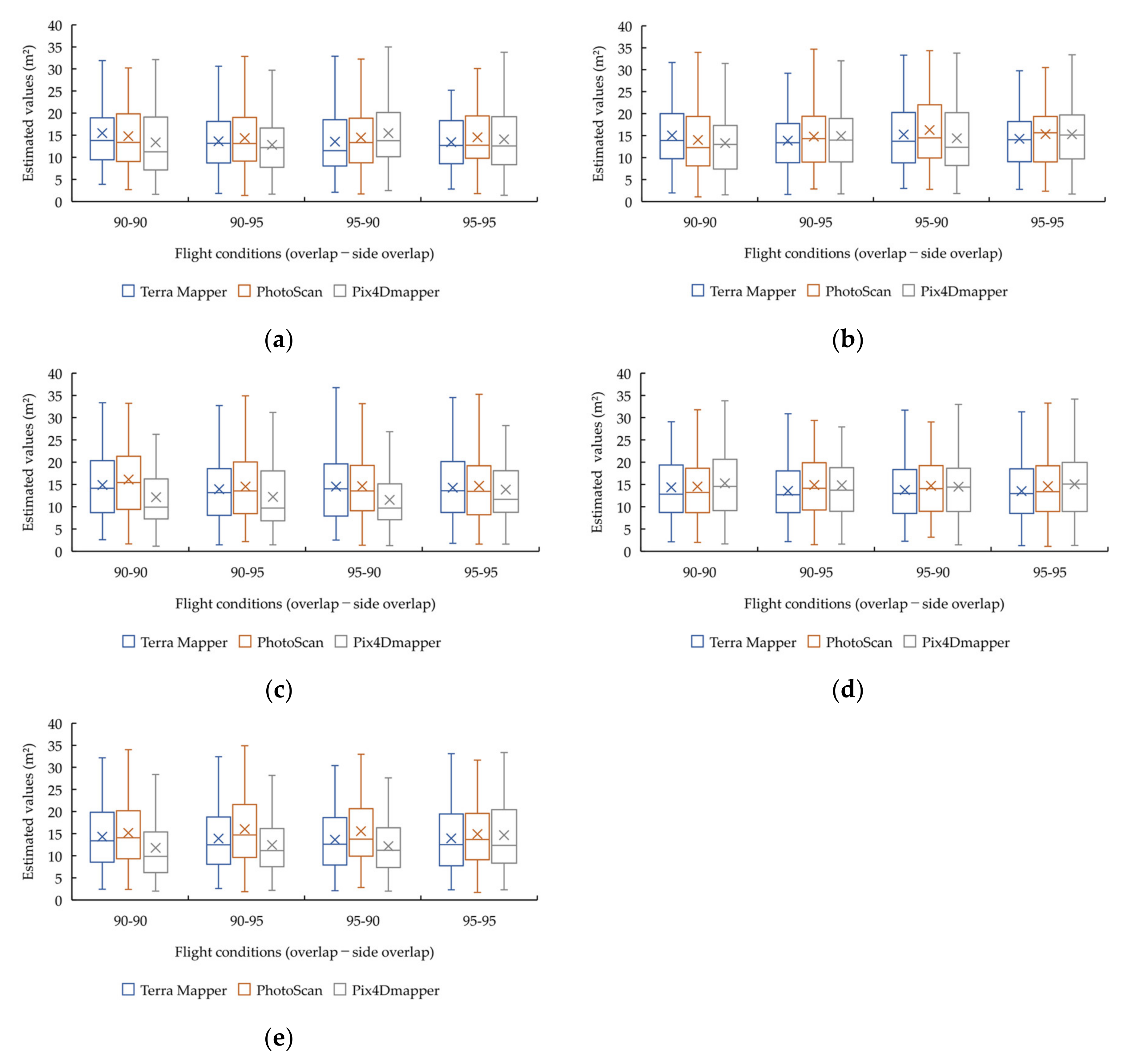
3.3. Estimation of Crown Area
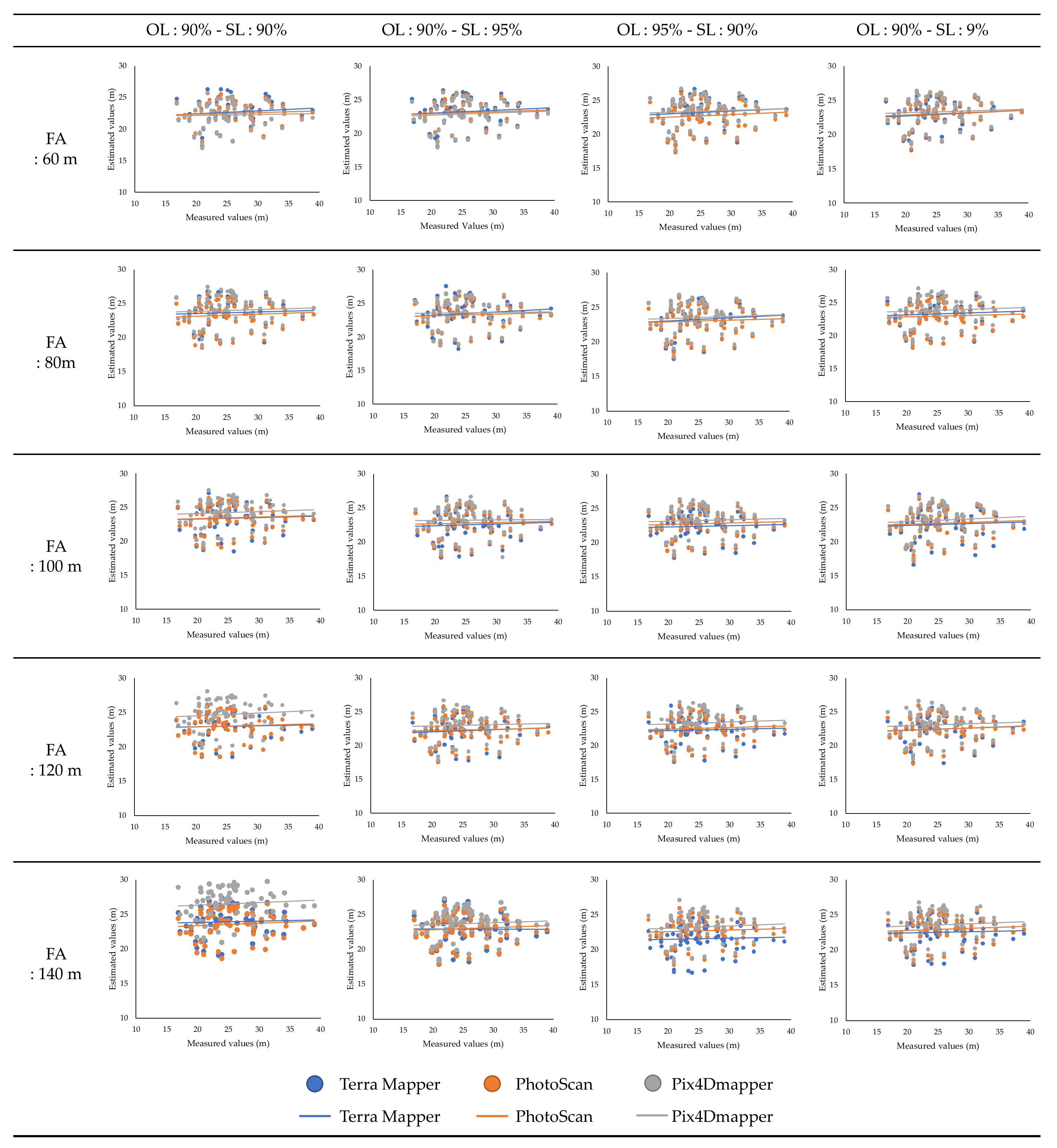
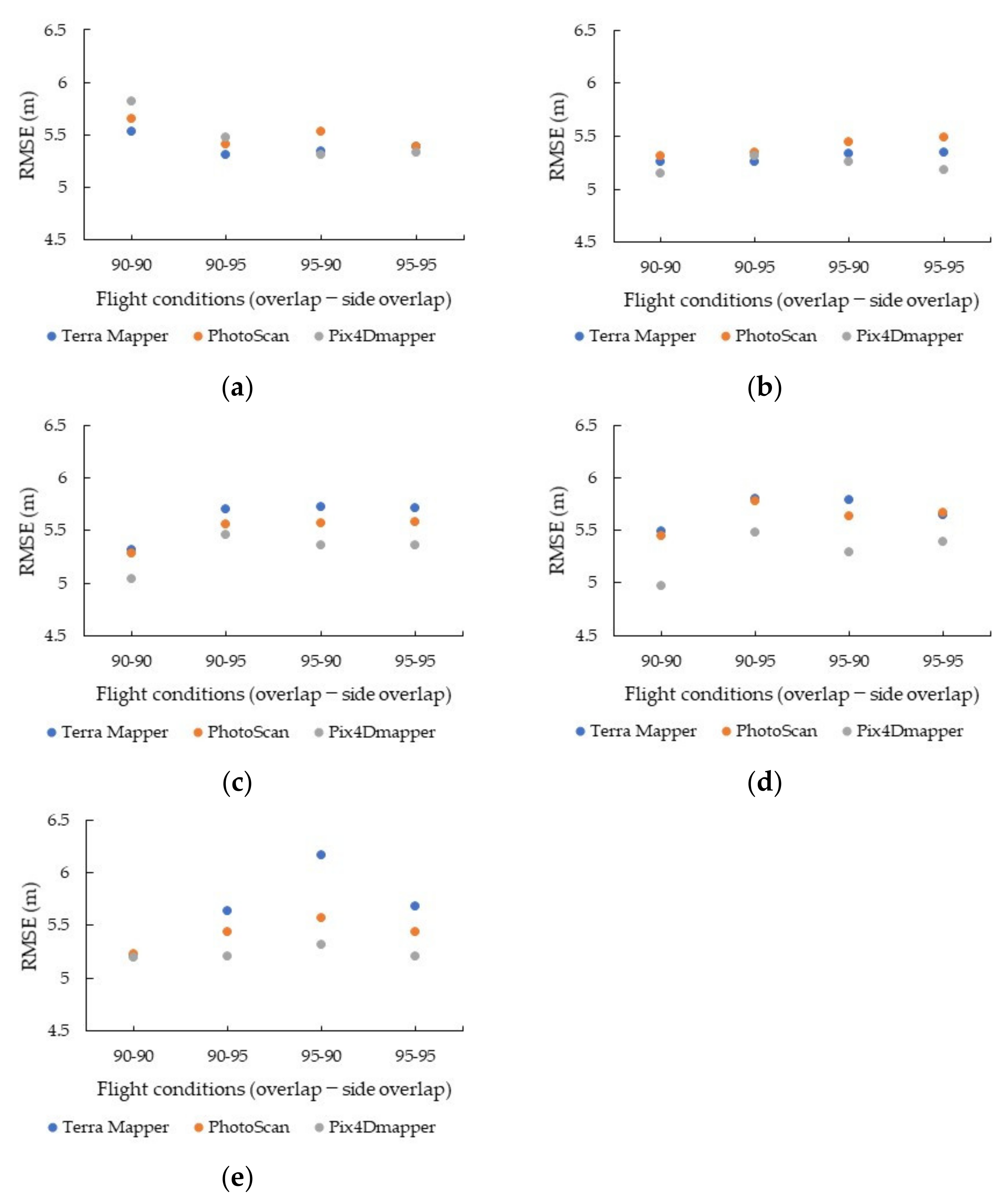
3.4. Estimation of Tree Height
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.A.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.T.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.; Tomé, M.; Díaz-Varela, R. Use of Multi-Temporal UAV-Derived Imagery for Estimating Individual Tree Growth in Pinus pinea Stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Bagaram, M.B.; Giuliarelli, D.; Chirici, G.; Giannetti, F.; Barbati, A. UAV Remote Sensing for Biodiversity Monitoring: Are Forest Canopy Gaps Good Covariates? Remote Sens. 2018, 10, 1397. [Google Scholar]
- Li, J.; Yang, B.; Cong, Y.; Cao, L.; Fu, X.; Dong, Z. 3D forest mapping using a low-cost UAV laser scanning system: Investigation and comparison. Remote Sens. 2019, 11, 717. [Google Scholar] [CrossRef]
- Durfee, N.; Ochoa, C.; Mata-Gonzalez, R. The Use of Low-Altitude UAV Imagery to Assess Western Juniper Density and Canopy Cover in Treated and Untreated Stands. Forests 2019, 10, 296. [Google Scholar] [CrossRef]
- González-Jaramillo, V.; Fries, A.; Bendix, J. AGB Estimation in a Tropical Mountain Forest (TMF) by Means of RGB and Multispectral Images Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2019, 11, 1413. [Google Scholar] [CrossRef]
- Nuijten, R.; Coops, N.; Goodbody, T.; Pelletier, G. Examining the Multi-Seasonal Consistency of Individual Tree Segmentation on Deciduous Stands Using Digital Aerial Photogrammetry (DAP) and Unmanned Aerial Systems (UAS). Remote Sens. 2019, 11, 739. [Google Scholar] [CrossRef]
- Jayathunga, S.; Owari, T.; Tsuyuki, S. Evaluating the Performance of Photogrammetric Products Using Fixed-Wing UAV Imagery over a Mixed Conifer-Broadleaf Forest: Comparison with Airborne Laser Scanning. Remote Sens. 2018, 10, 187. [Google Scholar] [CrossRef]
- Tang, L.; Shao, G. Drone remote sensing for forestry research and practices. Int. J. For. Res. 2015, 26, 791–797. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry Remote Sensing from Unmanned Aerial Vehicles: A Review Focusing on the Data, Processing and Potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef]
- Obanawa, H.; Hayakawa, Y.; Gomez, Y. 3D Modelling of inaccessible areas using UAV-based aerial photography and structure from motion. Transact. Jpn. Geomorphol. Union 2014, 35, 283–294. [Google Scholar]
- Murakami, T. Forest Remote Sensing Using UAVs. J. Remote Sens. Soc. Jpn. 2018, 38, 258–265. [Google Scholar]
- He, H.; Yan, Y.; Chen, T.; Cheng, P. Tree height estimation of forest plantation in mountainous terrain from bare-earth points using a DoG-coupled radial basis function neural network. Remote Sens. 2019, 11, 1271. [Google Scholar] [CrossRef]
- Ganz, S.; Käber, Y.; Adler, P. Measuring Tree Height with Remote Sensing—A Comparison of Photogrammetric and LiDAR Data with Different Field Measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef]
- Krause, S.; Sanders, T.G.; Mund, J.P.; Greve, K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef]
- Birdal, A.C.; Avdan, U.; Turk, T. Estimating tree heights with images from an unmanned aerial vehicle. Geomat. Nat. Hazards Risk 2017, 8, 1144–1156. [Google Scholar] [CrossRef]
- Sothe, C.; Dalponte, M.; de Almeida, C.M.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; Tommaselli, A.M.G. Tree Species Classification in a Highly Diverse Subtropical Forest Integrating UAV-Based Photogrammetric Point Cloud and Hyperspectral Data. Remote Sens. 2019, 11, 1338. [Google Scholar] [CrossRef]
- Fujimoto, A.; Haga, C.; Matsui, T.; Machimura, T.; Hayashi, K.; Sugita, S.; Takagi, H. An End to End Process Development for UAV-SfM Based Forest Monitoring: Individual Tree Detection, Species Classification and Carbon Dynamics Simulation. Forests 2019, 10, 680. [Google Scholar] [CrossRef]
- Tmušić, G.; Manfreda, S.; Aasen, H.; James, M.R.; Gonçalves, G.; Ben Dor, E.; Brook, A.; Polinova, M.; Arranz, J.J.; Mészáros, J.; et al. Current Practices in UAS-based Environmental Monitoring. Remote Sens. 2020, 12, 1001. [Google Scholar] [CrossRef]
- Huang, H.; He, S.; Chen, C. Leaf Abundance Affects Tree Height Estimation Derived from UAV Images. Forests 2019, 10, 931. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Ewertowski, M.W.; Tomczyk, A.M.; Evans, D.J.A.; Roberts, D.H.; Ewertowski, W. Operational Framework for Rapid, Very-high Resolution Mapping of Glacial Geomorphology Using Low-cost Unmanned Aerial Vehicles and Structure-from-Motion Approach. Remote Sens. 2019, 11, 65. [Google Scholar] [CrossRef]
- Ministry of Land, Infrastructure, Transport and Tourism. Guidelines for Safe Flight of Unmanned Aerial Vehicles (Drones, Radio-Controlled Vehicles, etc.). Available online: https://www.mlit.go.jp/common/001303818.pdf (accessed on 17 September 2019).
- Domingo, D.; Ørka, H.O.; Næsset, E.; Kachamba, D.; Gobakken, T. Effects of UAV Image Resolution, Camera Type, and Image Overlap on Accuracy of Biomass Predictions in a Tropical Woodland. Remote Sens. 2019, 11, 948. [Google Scholar] [CrossRef]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; Aardt, J.V.; Kunneke, A.; Seifert, T. Influence of Drone Altitude, Image Overlap, and Optical Sensor Resolution on Multi-View Reconstruction of Forest Images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef]
- Ni, W.; Sun, G.; Pang, Y.; Zhang, Z.; Liu, J.; Yang, A.; Wang, Y.; Zhang, D. Mapping Three-Dimensional Structures of Forest Canopy Using UAV Stereo Imagery: Evaluating Impacts of Forward Overlaps and Image Resolutions with LiDAR Data as Reference. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 3578–3589. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Lin, J.; Wang, M.; Ma, M.; Lin, Y. Aboveground Tree Biomass Estimation of Sparse Subalpine Coniferous Forest with UAV Oblique Photography. Remote Sens. 2018, 10, 1849. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–994. [Google Scholar] [CrossRef]
- Bonnet, S.; Lisein, J.; Lejeune, P. Comparison of UAS photogrammetric products for tree detection and characterization of coniferous stands. Int. J. Remote Sens. 2017, 38, 5310–5337. [Google Scholar] [CrossRef]
- Brieger, F.; Herzschuh, U.; Pestryakova, L.A.; Bookhagen, B.; Zakharov, E.S.; Kruse, S. Advances in the Derivation of Northeast Siberian Forest Metrics Using High-Resolution UAV-Based Photogrammetric Point Clouds. Remote Sens. 2019, 11, 1447. [Google Scholar] [CrossRef]
- Mlambo, R.; Woodhouse, I.H.; Gerard, F.; Anderson, K. Structure from Motion (SfM) Photogrammetry with Drone Data: A Low Cost Method for Monitoring Greenhouse Gas Emissions from Forests in Developing Countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef]
- Chikatsu, H.; Odaka, A.; Yanagi, H.; Yokoyama, H. Performance Evaluation of 3D Modeling Software for UAV Photogrammetry. J. Jpn. Soc. Photogram. Remote Sens. 2016, 55, 117–127. [Google Scholar]
- Sugai, S.; Miyaji, K.; Nakamura, T.; Minami, H.; Tachibana, K. Accuracy verification of photogrammetry using UAV. J. Geospat. Inf. Auth. Jpn. 2017, 129, 147–157. [Google Scholar]
- Ueno, Y. Feasibility study and application of three-dimensional aerial photogrammetry technology using unmanned aerial vehicle (UAV) to natural environmental measurements. Ecol. Civ. Eng. 2016, 19, 91–100. [Google Scholar] [CrossRef]
- Woodget, A.S.; Austrums, R.; Maddock, I.P.; Habit, E. Drones and digital photogrammetry: From classifications to continuums for monitoring river habitat and hydromorphology. Wiley Interdiscip. Rev. Water 2017, 4, e1222. [Google Scholar] [CrossRef]
- Forsmoo, J.; Anderson, K.; Macleod, C.J.A.; Wilkinson, M.E.; DeBell, L.; Brazier, R.E. Structure from motion photogrammetry in ecology: Does the choice of software matter? Ecol. Evol. 2019, 9, 12964–12979. [Google Scholar] [CrossRef]
- Kitagawa, E.; Muraki, H.; Yoshinaga, K.; Yamagishi, J.; Tsumura, Y. Research on Shape Characteristic of 3D Modeling Software (SfM/MVS) in UAV Aerial Images. J. Jpn. Soc. Civ. Eng. 2018, 74, 143–148. [Google Scholar] [CrossRef]
- Sona, G.; Pinto, L.; Pagliari, D.; Passoni, D.; Gini, R. Experimental analysis of different software packages for orientation and digital surface modelling from UAV images. Earth Sci. Inform. 2014, 7, 97–107. [Google Scholar] [CrossRef]
- Escobar Villanueva, J.R.; Iglesias Martínez, L.; Pérez Montiel, J.I. DEM Generation from Fixed-Wing UAV Imaging and LiDAR-Derived Ground Control Points for Flood Estimations. Sensors 2019, 19, 3205. [Google Scholar] [CrossRef] [PubMed]
- Jaud, M.; Passot, S.; Le Bivic, R.; Delacourt, C.; Grandjean, P.; Le Dantec, N. Assessing the accuracy of high resolution digital surface models computed by PhotoScan® and MicMac® in sub-optimal survey conditions. Remote Sens. 2016, 8, 465. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing accuracy and repeatability of UAV blocks oriented with gnss-supported aerial triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Casella, V.; Chiabrando, F.; Franzini, M.; Manzino, A.M. Accuracy Assessment of A UAV Block by Different Software Packages, Processing Schemes and Validation Strategies. ISPRS Int. J. Geo Inf. 2020, 9, 164. [Google Scholar] [CrossRef]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) data collection of complex forest environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef]
- Kameyama, S.; Sugiura, K. Estimating Tree Height and Volume Using Unmanned Aerial Vehicle Photography and SfM Technology, with Verification of Result Accuracy. Drones 2020, 4, 19. [Google Scholar] [CrossRef]
- DJI. Phantom3 Advanced User Manual (Japanese Version) V1.2. Available online: https://dl.djicdn.com/downloads/phantom_3/jp/Phantom_3_Advanced_User_Manual_v1.2_jp_160406.pdf (accessed on 17 November 2018).
- DJI GS PRO User Manual (Japanese Version) V2.0. Available online: https://dl.djicdn.com/downloads/groundstation_pro/JP/GS_Pro_User_Manual_v2.0_JP_201811.pdf (accessed on 17 November 2018).
- Terra Mapper User Manual. Available online: https://drive.google.com/drive/folders/1s5oVb7JpCEomynYx6vLoYrI4CC15CLEx (accessed on 2 April 2020).
- Agisoft Metashape User Manual. Professional Edition, Version 1.6. Available online: https://www.agisoft.com/pdf/metashape-pro_1_6_en.pdf (accessed on 2 April 2020).
- Pix4Dmapper 4.1 User Manual. Available online: https://support.pix4d.com/hc/en-us/articles/204272989-Offline-Getting-Started-and-Manual-pdf (accessed on 2 April 2020).
- Geospatial Information Authority of Japan. The Manual for Public Survey Using UAV (Proposed) March 2017 Version. Available online: https://www.gsi.go.jp/common/000186712.pdf (accessed on 7 October 2018).
- Ministry of Agriculture, Forestry and Fisheries. The 2014 Survey on Disaster Countermeasures in Watersheds and Mountainous Areas (A Study on Driftwood Countermeasures) Commissioned Project Report 3. Examination of Methods to Assess Landslide Prevention Function of Forests and Risk of Driftwood. Available online: http://www.maff.go.jp/j/budget/yosan_kansi/sikkou/tokutei_keihi/seika_h26/ippan/pdf/ippan263_03.pdf (accessed on 7 October 2018).
- Kobayashi, H. Automated aerial shooting, counting tree numbers and measuring tree heights for Sugi stands with a UAV. Chubu For. Res. 2019, 67, 57–60. [Google Scholar]
- Wada, Y. Case Study of Forest Inventory using Drone for Deforestation and Forest Degradation Monitoring. J. Jpn. Soc. Photogram. Remote Sens. 2017, 56, 191–195. [Google Scholar] [CrossRef]
- Gülci, S. The determination of some stand parameters using SfM-based spatial 3D point cloud in forestry studies: An analysis of data production in pure coniferous young forest stands. Environ. Monit. Assess. 2019, 191, 495. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK method-An optimal solution for mapping inaccessible forested areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef]
- Ministry of Agriculture, Forestry and Fisheries. The 2018 “Commissioned Project to Build a System to Improve Efficiency of Methods Such as Harvest Survey in National Forests” UAV Stand Inventory Manual. Available online: http://www.rinya.maff.go.jp/j/gyoumu/gijutu/attach/pdf/syuukaku_kourituka-2.pdf (accessed on 17 September 2019).
- Zhang, Y.; Wu, H.; Yang, W. Forests Growth Monitoring Based on Tree Canopy 3D Reconstruction Using UAV Aerial Photogrammetry. Forests 2019, 10, 1052. [Google Scholar] [CrossRef]
- Jensen, J.L.R.; Mathews, A.J. Assessment of Image-Based Point Cloud Products to Generate a Bare Earth Surface and Estimate Canopy Heights in a Woodland Ecosystem. Remote Sens. 2016, 8, 50. [Google Scholar] [CrossRef]
- Kachamba, D.J.; Ørka, H.O.; Gobakken, T.; Eid, T.; Mwase, W. Biomass Estimation Using 3D Data from Unmanned Aerial Vehicle Imagery in a Tropical Woodland. Remote Sens. 2016, 8, 968. [Google Scholar] [CrossRef]
- Vacca, G.; Dessì, A.; Sacco, A. The Use of Nadir and Oblique UAV Images for Building Knowledge. ISPRS Int. J. Geo Inf. 2017, 6, 393. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value(s) | Condition |
|---|---|---|
| Flight altitude (m) | 60 (GSD: 2.6 cm), 80 (GSD: 3.5 cm), 100 (GSD: 4.3 cm), 120 (GSD: 5.2 cm), 140 (GSD: 6.1 cm) | 5 |
| Overlap (%) | 80, 85, 90, 95 | 4 |
| Side overlap (%) | 80, 85, 90, 95 | 4 |
| Flight speed | 15.0 m/s | 1 |
| Photography method | Hovering | 1 |
| Total flight conditions | 80 | |
| Overlap–Side Overlap | Flight Altitude (m) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (%) | 60 | 80 | 100 | 120 | 140 | ||||||||||
| T | Ph | Pi | T | Ph | Pi | T | Ph | Pi | T | Ph | Pi | T | Ph | Pi | |
| 80–80 | C | B | B | C | B | B | C | B | B | C | B | B | C | B | B |
| 80–85 | C | C | B | C | B | B | C | A | B | C | A | B | C | B | B |
| 80–90 | C | A | A | C | A | B | B | A | A | A | A | A | B | A | A |
| 80–95 | A | A | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 85–80 | C | B | B | C | B | B | C | B | B | C | B | B | C | B | B |
| 85–85 | C | B | B | C | B | B | C | B | B | C | B | B | C | B | B |
| 85–90 | B | A | A | B | A | A | B | A | A | A | A | A | A | A | A |
| 85–95 | A | A | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 90–80 | C | B | A | C | B | B | C | B | B | C | B | B | C | B | B |
| 90–85 | B | A | A | B | A | A | B | A | A | B | B | A | B | B | B |
| 90–90 | A | A | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 90–95 | A | A | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 95–80 | B | A | A | A | A | B | B | B | A | A | B | B | A | B | B |
| 95–85 | B | A | A | A | A | A | A | A | A | A | A | A | A | B | A |
| 95–90 | A | A | A | A | A | A | A | A | A | A | A | A | A | A | A |
| 95–95 | A | A | A | A | A | A | A | A | A | A | A | A | A | A | A |
| Flight Conditions (FA–OL–SL) | Terra Mapper | PhotoScan | Pix4Dmapper | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NC/NT | CLE (m) | RE (pix) | NC/NT | CLE (m) | RE (pix) | NC/NT | CLE (m) | RE (pix) | |||||||
| X | Y | Z | X | Y | Z | X | Y | Z | |||||||
| 60-90-90 | 51 / 53 | 0.135 | 0.097 | 0.109 | 0.948 | 53/53 | 0.209 | 0.149 | 0.137 | 0.392 | 53/53 | 0.198 | 0.177 | 0.305 | 0.155 |
| 60-90-95 | 85/85 | 0.114 | 0.122 | 0.128 | 0.982 | 85/85 | 0.142 | 0.148 | 0.183 | 0.552 | 85/85 | 0.125 | 0.112 | 0.193 | 0.163 |
| 60-95-90 | 92/93 | 0.133 | 0.252 | 0.324 | 0.942 | 93/93 | 0.164 | 0.313 | 0.383 | 0.424 | 93/93 | 0.129 | 0.116 | 0.119 | 0.155 |
| 60-95-95 | 191/191 | 0.178 | 0.528 | 0.439 | 1.066 | 191/191 | 0.216 | 0.559 | 0.511 | 0.822 | 191/191 | 0.105 | 0.092 | 0.161 | 0.191 |
| 80-90-90 | 30/32 | 0.114 | 0.109 | 0.147 | 0.937 | 32/32 | 0.637 | 0.149 | 0.172 | 0.339 | 30/32 | 0.272 | 0.247 | 0.422 | 0.126 |
| 80-90-95 | 63/63 | 0.206 | 0.204 | 0.389 | 1.057 | 63/63 | 0.289 | 0.256 | 0.489 | 0.695 | 63/63 | 0.156 | 0.141 | 0.241 | 0.175 |
| 80-95-90 | 50/50 | 0.157 | 0.164 | 0.200 | 0.964 | 50/50 | 0.194 | 0.194 | 0.237 | 0.509 | 50/50 | 0.164 | 0.146 | 0.252 | 0.141 |
| 80-95-95 | 93/93 | 0.142 | 0.154 | 0.240 | 1.067 | 93/93 | 0.178 | 0.209 | 0.281 | 0.746 | 93/93 | 0.101 | 0.089 | 0.155 | 0.18 |
| 100-90-90 | 21/21 | 0.176 | 0.138 | 0.122 | 0.898 | 21/21 | 0.197 | 0.121 | 0.123 | 0.514 | 21/21 | 0.259 | 0.23 | 0.398 | 0.133 |
| 100-90-95 | 41/41 | 0.215 | 0.205 | 0.225 | 1.037 | 41/41 | 0.269 | 0.240 | 0.286 | 0.723 | 41/41 | 0.172 | 0.156 | 0.267 | 0.167 |
| 100-95-90 | 36/36 | 0.122 | 0.074 | 0.158 | 0.979 | 36/36 | 0.172 | 0.101 | 0.201 | 0.594 | 36/36 | 0.159 | 0.14 | 0.243 | 0.143 |
| 100-95-95 | 64/64 | 0.140 | 0.109 | 0.224 | 1.052 | 64/64 | 0.175 | 0.141 | 0.308 | 0.751 | 64/64 | 0.123 | 0.11 | 0.189 | 0.174 |
| 120-90-90 | 14/14 | 0.107 | 0.090 | 0.346 | 1.197 | 14/14 | 0.194 | 0.115 | 0.405 | 1.470 | 14/14 | 0.519 | 0.462 | 0.799 | 0.172 |
| 120-90-95 | 30/30 | 0.131 | 0.071 | 0.095 | 1.022 | 30/30 | 0.175 | 0.089 | 0.127 | 0.704 | 30/30 | 0.196 | 0.177 | 0.303 | 0.163 |
| 120-95-90 | 25/25 | 0.097 | 0.083 | 0.098 | 0.993 | 25/25 | 0.122 | 0.107 | 0.137 | 0.591 | 25/25 | 0.203 | 0.181 | 0.313 | 0.14 |
| 120-95-95 | 51/51 | 0.116 | 0.074 | 0.217 | 1.047 | 51/51 | 0.138 | 0.096 | 0.262 | 0.740 | 51/51 | 0.128 | 0.116 | 0.198 | 0.164 |
| 140-90-90 | 12/12 | 0.106 | 0.086 | 0.283 | 1.128 | 12/12 | 0.152 | 0.122 | 0.321 | 0.683 | 12/12 | 0.476 | 0.44 | 0.745 | 0.155 |
| 140-90-95 | 26/26 | 0.164 | 0.122 | 0.345 | 1.264 | 26/26 | 0.196 | 0.132 | 0.448 | 1.280 | 26/26 | 0.263 | 0.239 | 0.407 | 0.181 |
| 140-95-90 | 21/21 | 0.120 | 0.066 | 0.306 | 1.319 | 21/21 | 0.179 | 0.091 | 0.370 | 1.250 | 21/21 | 0.333 | 0.3 | 0.515 | 0.187 |
| 140-95-95 | 40/40 | 0.167 | 0.093 | 0.418 | 1.229 | 40/40 | 0.210 | 0.121 | 0.512 | 1.360 | 40/40 | 0.172 | 0.154 | 0.265 | 0.183 |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 60-90-90 | 60-90-95 | 60-95-90 | 60-95-95 | ||
| T | Ph | 0.53 | 0.08 | 0.03 * | 0.02 * |
| T | Pi | 0.001 ** | 0.05 | <0.001 *** | 0.32 |
| Ph | Pi | 0.001 ** | <0.001 *** | 0.04 * | 0.99 |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 80-90-90 | 80-90-95 | 80-95-90 | 80-95-95 | ||
| T | Ph | 0.009 ** | 0.02 * | 0.002** | <0.001 *** |
| T | Pi | <0.001 *** | 0.008 ** | 0.02* | <0.001 *** |
| Ph | Pi | 0.02 * | 1 | <0.001*** | 1 |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 100-90-90 | 100-90-95 | 100-95-90 | 100-95-95 | ||
| T | Ph | 0.001 ** | 0.42 | 1 | ― |
| T | Pi | <0.001 *** | <0.001 *** | <0.001 *** | ― |
| Ph | Pi | <0.001 *** | <0.001 *** | <0.001 *** | ― |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 120-90-90 | 120-90-95 | 120-95-90 | 120-95-95 | ||
| T | Ph | 1 | <0.001 *** | 0.003 ** | <0.001 *** |
| T | Pi | 0.02 * | <0.001 *** | 0.02 * | <0.001 *** |
| Ph | Pi | 0.07 | 1 | 1 | 0.22 |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 140-90-90 | 140-90-95 | 140-95-90 | 140-95-95 | ||
| T | Ph | 0.005 ** | <0.001 *** | <0.001 *** | <0.001 *** |
| T | Pi | <0.001 *** | <0.001 *** | <0.001 *** | 0.28 |
| Ph | Pi | <0.001 *** | <0.001 *** | <0.001 *** | 1 |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 60-90-90 | 60-90-95 | 60-95-90 | 60-95-95 | ||
| T | Ph | <0.001 *** | <0.001 *** | <0.001 *** | 0.02 * |
| T | Pi | <0.001 *** | <0.001 *** | 0.002 ** | <0.001 *** |
| Ph | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 80-90-90 | 80-90-95 | 80-95-90 | 80-95-95 | ||
| T | Ph | <0.001 *** | 0.006 ** | <0.001 *** | <0.001 *** |
| T | Pi | <0.001 *** | 0.3 | <0.001 *** | <0.001 *** |
| Ph | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 100-90-90 | 100-90-95 | 100-95-90 | 100-95-95 | ||
| T | Ph | 0.4 | <0.001 *** | <0.001 *** | <0.001 *** |
| T | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Ph | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 120-90-90 | 120-90-95 | 120-95-90 | 120-95-95 | ||
| T | Ph | 1 | 0.24 | <0.001 *** | 1 |
| T | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Ph | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 140-90-90 | 140-90-95 | 140-95-90 | 140-95-95 | ||
| T | Ph | <0.001 *** | 0.34 | <0.001 *** | <0.001 *** |
| T | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Ph | Pi | <0.001 *** | <0.001 *** | <0.001 *** | <0.001 *** |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 60-90-90 | 60-90-95 | 60-95-90 | 60-95-95 | ||
| MV | T | <0.001 *** | 0.005 ** | 0.006 ** | 0.001 ** |
| MV | Ph | <0.001 *** | 0.002 ** | <0.001 *** | 0.002 ** |
| MV | Pi | <0.001 *** | <0.001 *** | 0.01 * | 0.01 * |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 80-90-90 | 80-90-95 | 80-95-90 | 80-95-95 | ||
| MV | T | 0.07 | 0.02 ** | 0.01 ** | 0.01 * |
| MV | Ph | 0.01 ** | 0.001 ** | 0.003 ** | 0.001 ** |
| MV | Pi | 0.29 | 0.05 | 0.04 ** | 0.13 |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 100-90-90 | 100-90-95 | 100-95-90 | 100-95-95 | ||
| MV | T | 0.02 * | <0.001 *** | <0.001 *** | <0.001 *** |
| MV | Ph | 0.02 * | <0.001 *** | 0.001 ** | 0.001 ** |
| MV | Pi | 0.63 | 0.01 * | 0.008 ** | 0.005 ** |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 120-90-90 | 120-90-95 | 120-95-90 | 120-95-95 | ||
| MV | T | 0.002 ** | <0.001 *** | <0.001 *** | <0.001 *** |
| MV | Ph | 0.002 ** | <0.001 *** | <0.001 *** | <0.001 *** |
| MV | Pi | 1 | 0.003 ** | 0.01 * | 0.004 ** |
| Flight altitude (m)-Overlap (%)-side overlap (%) | |||||
| 140-90-90 | 140-90-95 | 140-95-90 | 140-95-95 | ||
| MV | T | 0.22 | 0.002 ** | <0.001 *** | <0.001 *** |
| MV | Ph | 0.04 * | 0.002 ** | <0.001 *** | 0.001 ** |
| MV | Pi | 0.19 | 0.08 | 0.008 ** | 0.04 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kameyama, S.; Sugiura, K. Effects of Differences in Structure from Motion Software on Image Processing of Unmanned Aerial Vehicle Photography and Estimation of Crown Area and Tree Height in Forests. Remote Sens. 2021, 13, 626. https://doi.org/10.3390/rs13040626
Kameyama S, Sugiura K. Effects of Differences in Structure from Motion Software on Image Processing of Unmanned Aerial Vehicle Photography and Estimation of Crown Area and Tree Height in Forests. Remote Sensing. 2021; 13(4):626. https://doi.org/10.3390/rs13040626
Chicago/Turabian StyleKameyama, Shohei, and Katsuaki Sugiura. 2021. "Effects of Differences in Structure from Motion Software on Image Processing of Unmanned Aerial Vehicle Photography and Estimation of Crown Area and Tree Height in Forests" Remote Sensing 13, no. 4: 626. https://doi.org/10.3390/rs13040626
APA StyleKameyama, S., & Sugiura, K. (2021). Effects of Differences in Structure from Motion Software on Image Processing of Unmanned Aerial Vehicle Photography and Estimation of Crown Area and Tree Height in Forests. Remote Sensing, 13(4), 626. https://doi.org/10.3390/rs13040626