Abstract
In navigation, the Twice the Distance Root Mean Square (2DRMS) is commonly used as a position accuracy measure. Its determination, based on statistical methods, assumes that the position errors are normally distributed and are often not reflected in actual measurements. As a result of the widespread adoption of this measure, the positioning accuracy of navigation systems is overestimated by 10–15%. In this paper, a new method is presented for determining the navigation system positioning accuracy based on a reliability model where the system’s operation and failure statistics are referred to as life and failure times. Based on real measurements, the method proposed in this article will be compared with the classical method (based on the 2DRMS measure). Real (empirical) measurements made by the principal modern navigation positioning systems were used in the analyses: Global Positioning System (GPS) (168’286 fixes), Differential Global Positioning System (DGPS) (900’000 fixes) and European Geostationary Navigation Overlay Service (EGNOS) (900’000 fixes). Research performed on real data, many of which can be considered representative, have shown that the reliability method provides a better (compared to the 2DRMS measure) estimate of navigation system positioning accuracy. Thanks to its application, it is possible to determine the position error distribution of the navigation system more precisely when compared to the classical method, as well as to indicate those applications that can be used by this system, ensuring the safety of the navigation process.
1. Introduction
The main goal behind positioning systems is to provide air [1,2,3,4,5], land [6,7,8,9,10] and marine navigation [11,12,13,14,15] applications with such accuracy that the process is carried out safely. Such applications may include the following: a ship entering a port, driving a car along a route, landing an aircraft at an airport, stopping a tram on a platform, etc. The decision to qualify a positioning system as safe for a given navigation application is made based on a comparison of the position error characterizing the system with the minimum navigation requirements for a specific application specified in normative documents, such as radio navigation plans [16,17,18,19] and other recommendations or regulations [20,21,22,23,24]. These requirements most often include the following: positioning accuracy, availability, continuity, fix rate, integrity, operation range, reliability [25].
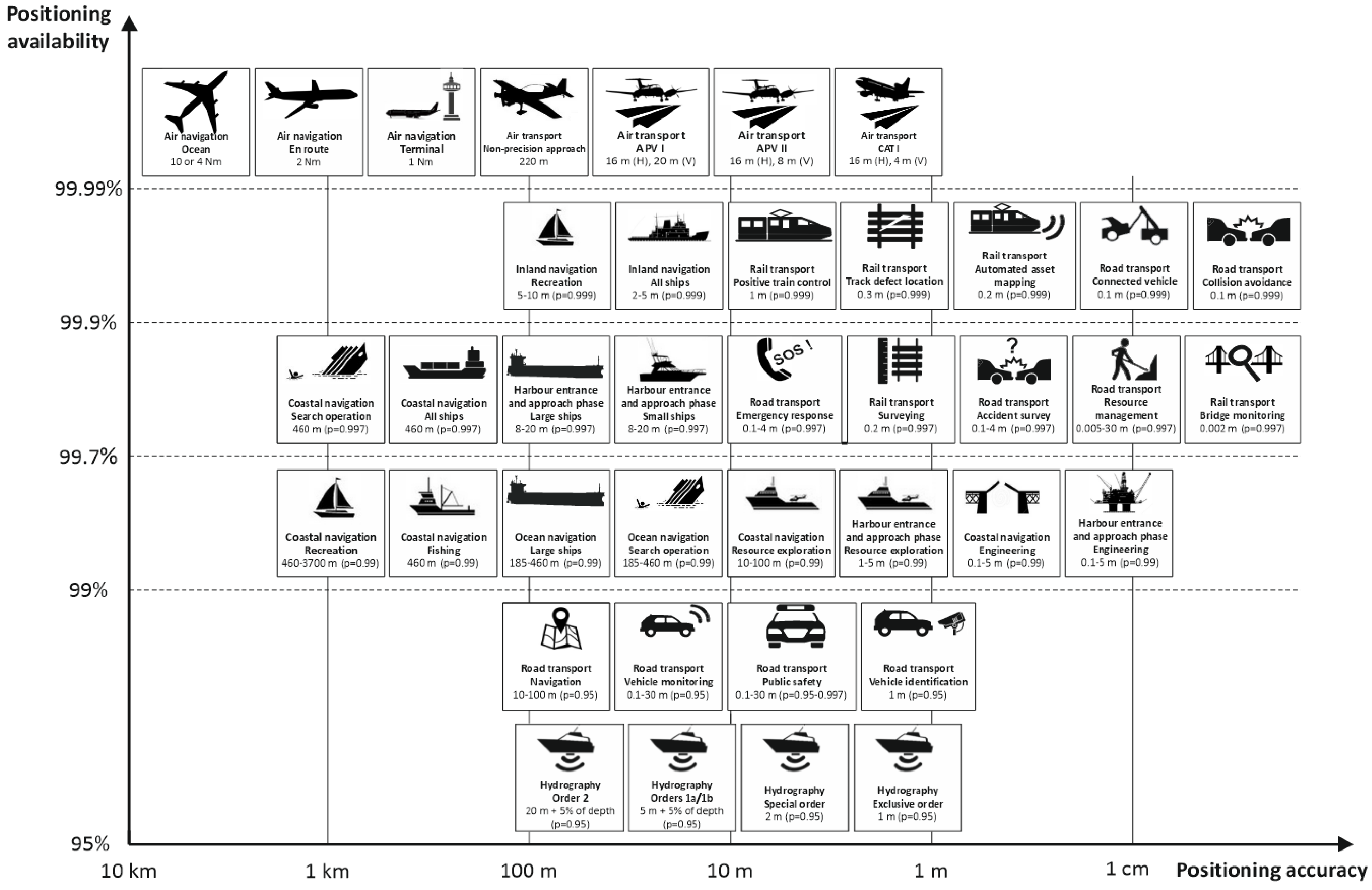
There is no doubt that, for decades of navigation development, it is the positioning accuracy that has been, and still is, the decisive factor for the use of a system for a specific navigation task, while the availability level of a specific position error is related to the threat that a positioning failure may pose to the safety of an object. Hence, air navigation requires top positioning availability. Figure 1 presents a synthesis of the requirements for different navigation applications in terms of the maximum permissible position error and its availability. The requirements found in various normative documents were used for the analysis.
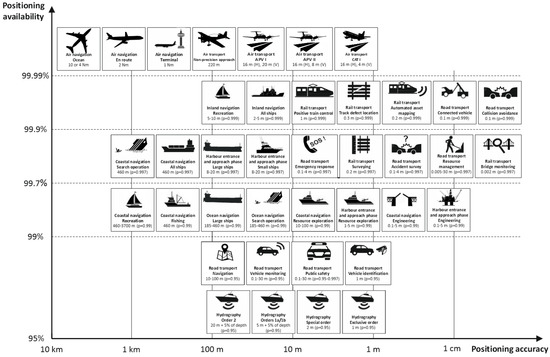
Figure 1.
Requirements for navigation positioning systems. Own study based on [16,17,18,19,20,21,22,23,24,26].
Figure 1 shows that each of the navigation applications should use a system with adequate positioning accuracy. This means, among other things, that a system with a positioning accuracy of 100 m cannot be used in hydrography as it requires a system with a positioning accuracy of less than 20 m for order 2, 5 m for orders 1a/1b, 2 m for special order and 1 m for exclusive order.
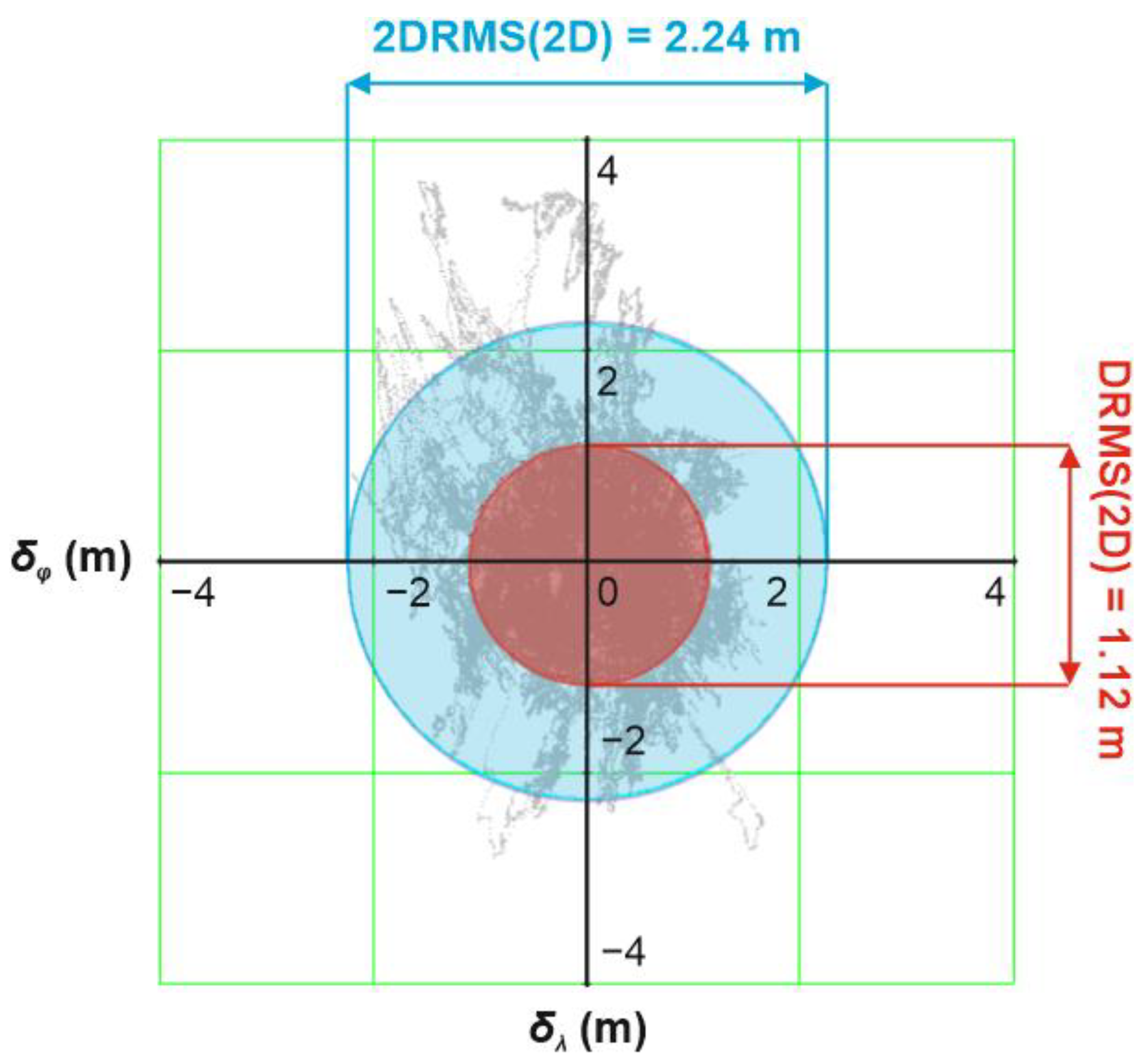
The navigation system positioning accuracy refers to the overlap between the statistics of the measured position coordinates and their real values or values assumed to be real (most often the average value from latitude (φ) and longitude (λ) measurements) [19]. A position accuracy measure is its error, which can be evaluated with reference to any dimension: plane (2D) or space (3D). In navigation, a position error is defined as the radius of the circle or sphere within which a certain proportion of position determinations should statistically fall. It is commonly accepted in navigation that position error statistics refer to 95% of the population, as the safety of the navigation process depends largely on the navigation system positioning accuracy. The Twice the Distance Root Mean Square (2DRMS(2D)) is used as a position accuracy measure. Its determination starts with the calculation of the DRMS(2D), which is the square root from the sum of the squares of the standard deviations of the position coordinates relative to φ and λ, as per the following relationship:
where: sφ—standard deviation of the geodetic (geographic) latitude; sλ—standard deviation of the geodetic (geographic) longitude.
The probability of the DRMS(2D) lies in the 63.2–68.3% range and depends on the relationship between the standard deviations. For sφ = sλ, p = 0.63, while for the relation sφ = 10 ·sλ, p = 0.68.
To provide greater statistical reliability of the DRMS(2D) in navigation, the 2DRMS(2D) measure is commonly used, taking the following form:
In navigation literature, the 2DRMS corresponds to a probability lying in the range 95.4–98.2% and is related to the relationship between the standard deviations determined with the two coordinates. Figure 2 shows the geometric interpretation of the position error.
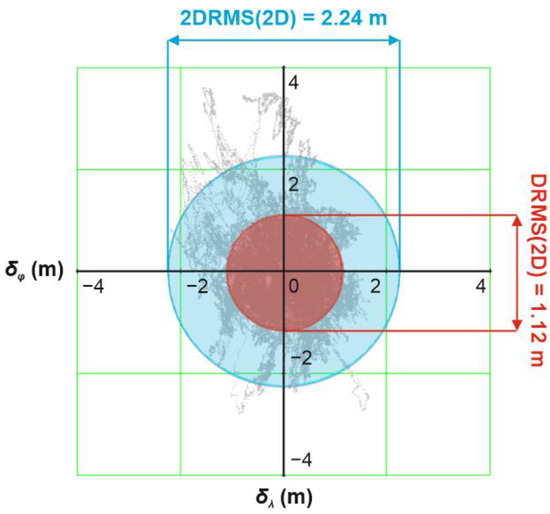
Figure 2.
Geometric interpretation of the concept of navigation system position error in 2D plane using DRMS and 2DRMS values.
Taking the 2DRMS value as the primary position accuracy measure by a navigation system is based on the assumption that φ and λ errors are normally distributed [27,28]. However, this belief has been questioned in several publications. The most important standard describing Global Positioning System (GPS) accuracy characteristics [28] states that the difference between the empirical value (64 m) and the theoretical value (83 m), as determined by the 2DRMS measure, was as much as 19 m. Similar conclusions concerning the inconsistency of the statistical distributions of Differential Global Positioning System (DGPS) and GPS position errors were raised by Frank van Diggelen, but with much smaller discrepancies [29].
The author’s research, conducted on various navigation positioning systems, has repeatedly confirmed the existence of such discrepancies. They related to systems such as DGPS and the European Geostationary Navigation Overlay Service (EGNOS) [30], the Global Navigation Satellite System (GNSS) and geodetic networks and multi-GNSS solutions [31,32,33].
Questioning normal distribution as a model for navigation positioning system errors has prompted the search for other methods to determine the value of the position error with 95% probability, as commonly used in navigation [27,28]. One of the methods based on reliability theory has already been proposed in [25]. This method allows the navigation system positioning availability to be determined for a specific (given) value of the position error based on life and failure times, and not based on measurement errors. The positioning system is fit when the position error does not exceed the allowable error. The failure period is defined as the logical negation of the fit period. A comparison of both methods (classical and reliability) is presented in Figure 3.
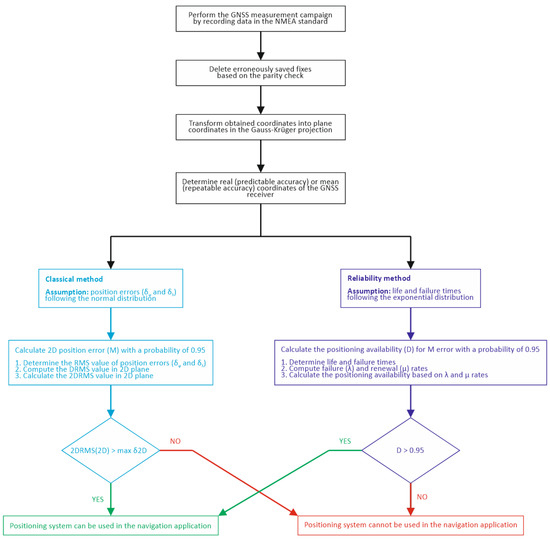
Figure 3.
Comparison of the classical and reliability methods for assessing the positioning system’s ability to meet the accuracy requirements for a navigation application.
In the classical approach, for a fixed probability (usually amounting to 95%), the position error (value of the 2DRMS) is calculated, whereas in the reliability method an acceptable error value is determined first, and only then is its probability is calculated. In the first method, the position error is a random variable and in the second method the random variable is the life or failure time. In the first method, 1D errors are assumed to be normally distributed and 2D errors are assumed to follow a chi-square distribution, while in the second method, exponential distributions of life and failure times are assumed.
The characteristics of the classical (based on the normal distribution) approach are as follows:
- The calculations are based on simple Root Mean Square (RMS) determination relationships;
- Gross errors and outliers significantly affect RMS (φ) and RMS (λ), causing a change in the 2DRMS measure;
- Errors are analysed, not as a function of time, but as a function of the subsequent measurement error. The navigation process runs as a function of time. The problem of missing synchronisation with time will emerge in the case of erroneous measurements (recording errors, which have to be removed from the dataset).
The reliability approach has the following characteristics:
- The calculations are quite complex;
- Gross errors and outliers affect the life and failure times in the same way as the other measurements;
- The analysis is carried out as a function of time, similar to the navigation process.
This paper aims to compare both methods and to evaluate the positioning system in terms of its fitness for a specific navigation application, based on real measurement data from the positioning system (long sessions). Therefore, the scientific purpose of this article are as follows:
- To propose a new (reliability-based) method to calculate position error values for a navigation system with a probability of 95%;
- To verify which method (classical or reliability) produces results closer to empirical data;
- To check, based on empirical data, the actual measurements of GPS, DGPS and EGNOS systems, whether the distributions of life and failure times for position errors are, in fact, exponential. The other distributions most commonly used in statistics will be tested: beta, Cauchy, chi-square, exponential, gamma, Laplace, logistic, lognormal, normal, Pareto, Rayleigh, Student’s and Weibull.
To assess which of the methods allows for more precise determination of the statistical value of the position errors, the measured position errors were sorted from the smallest to the largest, and based on this the value of the error that is greater exactly than 95% of the error population will be determined. In the navigation literature [34], this value is referred to as the R95 measure.
This is the third article in a series of monothematic publications “Research on empirical (actual) statistical distributions of navigation system position errors” [35,36,37]. The main scientific aim of this series is to answer the question of what statistical distributions follow the position errors of navigation systems such as GPS, Global Navigation Satellite System (GLONASS), BeiDou Navigation Satellite System (BDS), Galileo, DGPS, EGNOS and others. It must be emphasised that the purpose of both this paper and the whole series of publications is not to analyse the causes of Position Random Walk (PRW), such as ionospheric and tropospheric effects, multipath, noise, etc. This article rather analyses the statistical distributions of 1D and 2D position errors resulting from PRW. The causes might be very complex and probably deserve a separate series of publications.
2. Materials and Methods
2.1. Classical Method for Determining the Positioning Accuracy of a Navigation System with 95% Probability
The classical method for determining the positioning accuracy of a navigation system is based on a statistical approach. The works of Gerolamo Cardano [38], Pierre de Fermat and Blaise Pascal [39] on gambling, as well as the works of Christiaan Huygens [40] constitute the foundation of modern statistics. In 1812, Pierre-Simon Laplace formulated the classic definition of probability [41], which was mathematically formalised in 1933 by Andrey Kolmogorov [42], who gave the basic formulas of probability calculus and its axioms. Although modern statistics is an extremely young branch of mathematics, it is widely used in many fields, ranging from engineering [43] and economics [44] to the scientific aspects of computer science [45]. In navigation, similar to other sciences, it is assumed that the position errors of navigation systems are normally distributed. Major arguments justifying the use of normal distribution in research on positioning in navigation include [46]: intuition and tradition, simplicity of the distribution [47], consistency with the central limit theorem, as well as use as an approximation [48].
Position accuracy in navigation can be defined as a degree of conformance between the estimated or measured position and its true position. Position accuracy can be determined as different types of statistic. These can be calculated related to the true values of coordinates (predictable accuracy), or, if the actual position is not known, the mean position (repeatable accuracy) is often used as an approximation to the actual position. Both position solutions must be based on the same geodetic datum, e.g., the World Geodetic System 1984 (WGS-84) [19]. The most commonly used position accuracy measures in navigation and transport are as follows: CEP (Circular Error Probable, 2D, p = 0.5), SEP (Spherical Error Probable, 3D, p = 0.5), RMS (1D, p = 0.632–0.683), DRMS (2D or 3D, p = 0.632–0.683), 2DRMS (2D or 3D, p = 0.954–0.982) or 3DRMS (Triple Distance Root Mean Square, 2D or 3D, p = 0.997). The description of individual measures is presented in detail in [34]. However, the most common accuracy measure for assessing the positioning accuracy of navigation systems is 2DRMS.
2.2. Reliability Method for Determining the Positioning Accuracy of a Navigation System with 95% Probability
To assess the possibility of using a positioning system in a specific navigation application, a mathematical model based on the general theory of reliability has been proposed. Navigation has long used elements of reliability theory in studies related to the assessment of availability, continuity, integrity and reliability, but so far they have not been applied to assess whether a positioning system meets a certain level of accuracy and to determine the navigation system positioning accuracy [49].
Let us consider a positioning system that determines position as a function of time with an error defined as δn. Let us choose a specific type (s) of navigation applications for which we intend to check whether the positioning system meets the application requirements in terms of accuracy and availability. These requirements are presented in [16,17,18,19,20,21,22,23,24,26]. Let us run a measurement session of the positioning system of a representative length [37] and calculate position errors as a function of time.
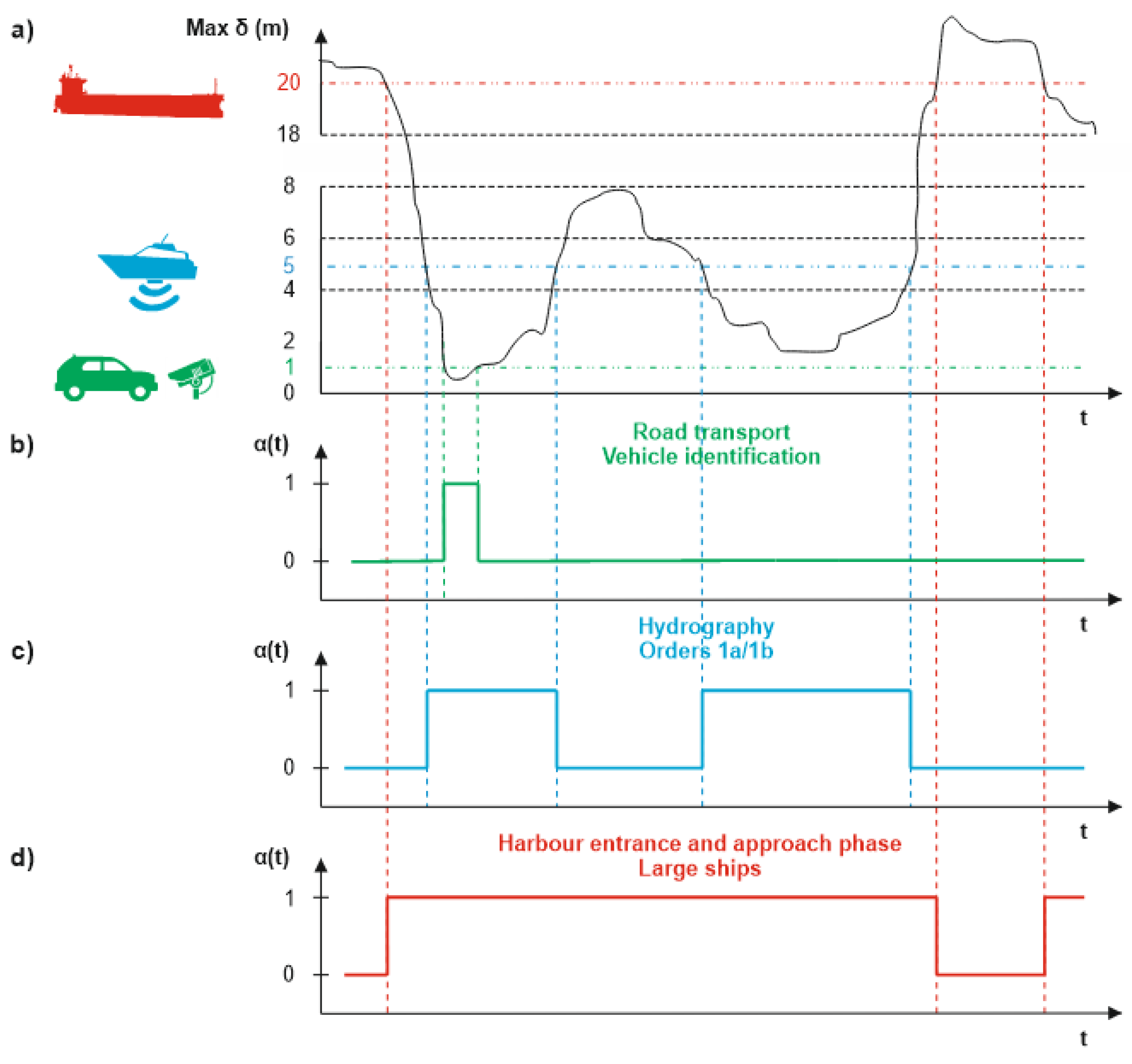
Figure 4 (top graph) shows the curve presenting the position error value as a function of time for any positioning system, which should be evaluated in terms of its usability in three exemplary navigation applications. Such applications include: road transport for vehicle identification, with the maximum allowable position error being 1 m with 95% availability, hydrography for orders 1a/1b, with the maximum allowable position error being 5 m with 95% availability and harbour entrance and approach phase for large ships, with the maximum allowable position error being 20 m with 99.7% availability.
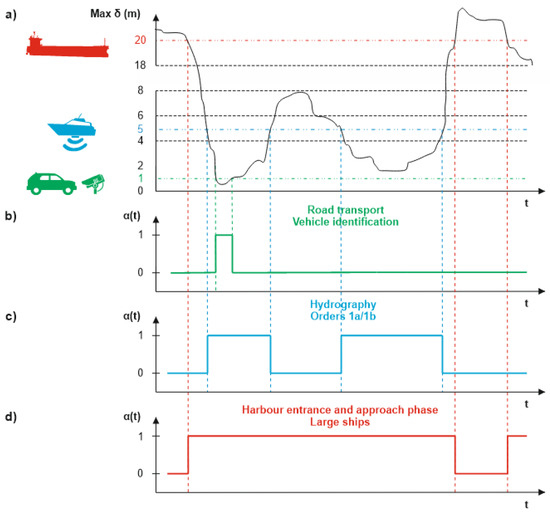
Figure 4.
The position error as a function of time (a) and three diagrams corresponding to the operational status for: (b) vehicle identification; (c) orders 1a/1b; (d) large ships.
Please note that in the presented graph (Figure 4a) the position error value varies as a function of time. Because, near the starting point in this plot, the position error exceeds 20 m, it does not provide the accuracy required for the harbour entrance and approach phase for large ships. This also means that a system with such an error cannot ensure the safe positioning of this process. As a result of exceeding the maximum permissible position error, the system’s fitness changes into an unfitness status, as reflected by the “0” values in Figure 4d. After some time, the position error (Figure 4a) decreases to less than 1 m, which means that, for some of the time, the system can be used in all applications. As a result of the reduction in the position error value, for all its applications, the working state of the system changes into a fitness status (Figure 4b–d). The graph (Figure 4a) presents the maximum permissible error values for all three navigation applications (1 m, 5 m and 20 m). If the position error exceeds any of these values, the working state changes. If the position error is smaller than this set value, the system enters the fitness status, and if it is larger, the system is in the unfitness status. Thus, the position coordinate determination can be treated as a two-status stationary renewal process, in which the life and failure times will become random variables, and not the position error as before (a classical approach) [50].
To be able to determine whether the system was fit or not, a U variable was introduced which corresponds to the maximum allowable value of the position error. Let us write it for the three applications under consideration as:
Assuming that the positioning process varies with time, it can be assigned two states. The first is the life time for which the position error is less than the maximum permissible position error corresponding to the given navigation application (δn ≤ U for number of measurements (n) = 1, 2,…). When the inverse relationship occurs (δn > U), the system is in a failure time.
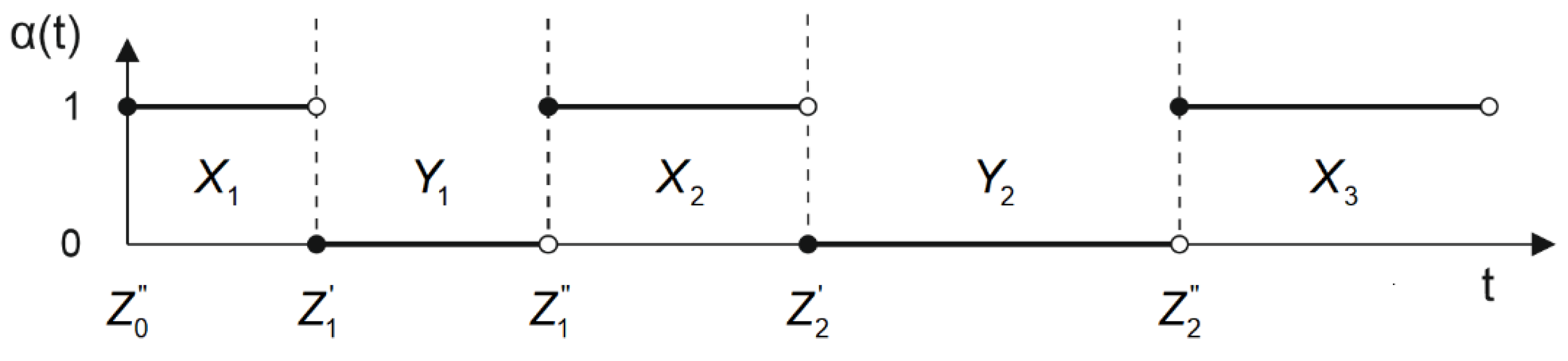
Let us assume that X1, X2,… correspond to the durations of life times and Y1, Y2,… denote the durations of failure times, which are independent and have the same distributions. Changing the durations of life and failure times results in the change of the operational status of a positioning system (α(t)). Hence, become the moments of failure, while are the moments of life (Figure 5) [26,51].
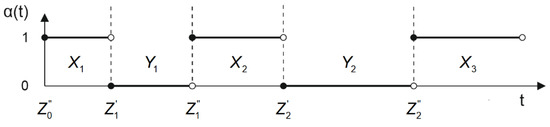
Figure 5.
The fitness and unfitness statuses of a positioning system in accordance with the reliability method. Own study based on [51].
For the reliability method, it is necessary to introduce a number of additional assumptions and designations [50]. It should be assumed that the Cumulative Distribution Functions (CDF) of life (F(x)) and failure (G(y)) times are right-continuous:
and that the expected values and variances will take the form:
where: E(Xi)—expected value of the life time; E(Yi)—expected value of the failure time; V(Xi)—variance of the life time; V(Yi)—variance of the failure time.
Moreover, it should be noted that:
Based on the above assumptions, it is possible to determine the relationship between the δn and U parameters. Thanks to this, the operational status of a positioning system can be assigned as [26,51]:
Let us define the navigation system positioning availability (A(t)) as the probability that at any moment of t, δn will not be greater than the value of U [51]:
where:
is a function of the renewal stream made up of the renewal moments of the navigation system complying with a specific operation type, while Φn(t) is a distribution function of the random variable .
For the purposes of navigation applications, the distributions of life and failure times are exponential. Therefore, their CDFs and Probability Density Functions (PDF) can be calculated using the following formulas [50]:
where: f(t)—PDF of the life time; g(t)—PDF of the failure time; λ—failure rate; μ—renewal rate.
When these assumptions are adopted, the final form of the availability can be noted as [51]:
as for the limit value:
2.3. Description of GPS, DGPS and EGNOS Measurement Campaigns
Three different navigation positioning systems, commonly used in world navigation, were used to study the reliability method. They include GPS (measurements from 2013), DGPS (measurements from 2014) and EGNOS (measurements from 2014).
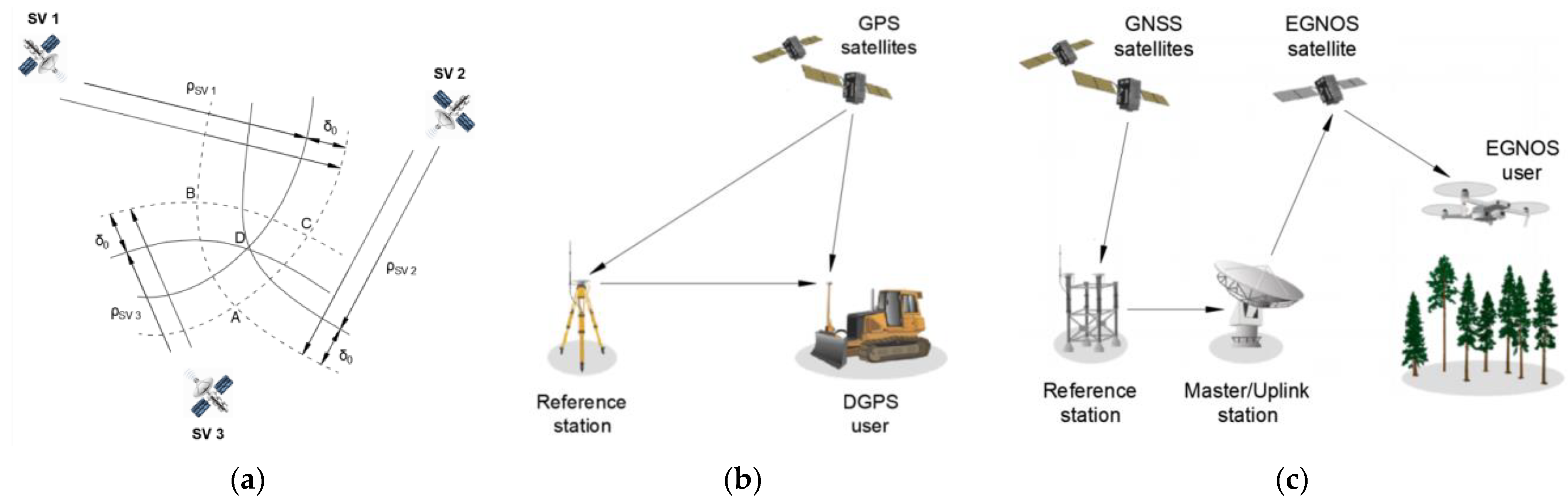
GPS is a space-based radionavigation system owned by the United States Government (USG) and operated by the United States Space Force (USSF). The GPS provides two services, or levels of accuracy: the Precise Positioning Service (PPS) and the Standard Positioning Service (SPS). The PPS is available to authorized users and the SPS is available to all users. SPS is the standard specified level of positioning, velocity, and timing accuracy that is available, without restrictions, to any user on a continuous worldwide basis. It provides a global average predictable positioning accuracy of 8 m (p = 0.95) horizontally and 13 m (p = 0.95) vertically and time transfer accuracy within 30 ns (p = 0.95) of Universal Time Coordinated (UTC) (Figure 6a) [52].
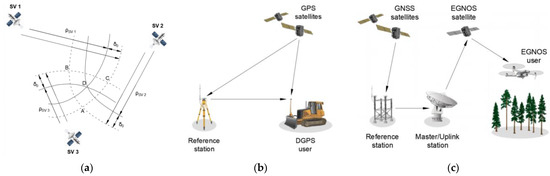
Figure 6.
Principles of: (a) GPS; (b) DGPS; (c) EGNOS. Own study based on [56].
DGPS is an enhancement of the GPS, carried out through the use of differential corrections to the basic satellite measurements performed within the user’s receiver. The DGPS is based on accurate knowledge of the geographic location of a reference station, which is used to compute corrections to GPS parameters and the resultant position solution. These differential corrections are then transmitted to DGPS users, who apply the corrections to their received GPS signals or computed position. For a civil user of SPS, differential corrections can improve navigation accuracy to better than 5 m (p = 0.95) (Figure 6b) [53,54].
EGNOS is Europe’s regional Satellite-Based Augmentation System (SBAS), which is used to improve the performance of GNSS systems, such as GPS and Galileo. It has been deployed to provide the safety of life navigation services to aviation, maritime and land-based users over most of Europe. According to [55], the positioning accuracy of the Open Service (OS) should be smaller than 3 m (p = 0.95) horizontally and 4 m (p = 0.95) vertically (Figure 6c).
The following empirical data were used for the numerical analyses:
- The GPS measurements were carried out at a point with coordinates: φ = 54°32.585029′ N and λ = 18°32.741505′ E (Poland). In March 2013, 168′286 fixes were recorded with a recording frequency of 1 Hz. A typical 12-channel GPS code receiver was used in the study;
- The DGPS measurements were carried out at a point with coordinates: φ = 54°31.756087′ N, λ = 18°33.574138′ E and h = 68.070 m (Poland). In April 2014, 951′698 fixes were recorded with a recording frequency of 1 Hz. 900′000 fixes were used for the analyses, which were the same as for EGNOS. A typical marine DGPS code receiver was used in the study;
- The EGNOS measurements were carried out at a point with coordinates: φ = 54°31.756087′ N, λ = 18°33.574138′ E and h = 68.070 m (Poland). In April 2014, 927′553 fixes were recorded with a recording frequency of 1 Hz. 900′000 fixes were used for the analyses, which were the same as for DGPS. A typical land EGNOS code receiver was used in the study.
3. Results
The research aims were formulated in the form of questions:
- Do the empirical (actual) distributions of life and failure times for position errors follow an exponential distribution?
- Are there distributions other than exponential with a better fit?
- Depending on the value of the error determining the fitness status (maximum permissible position error for a navigation application), will the statistical distribution of life times change or not?
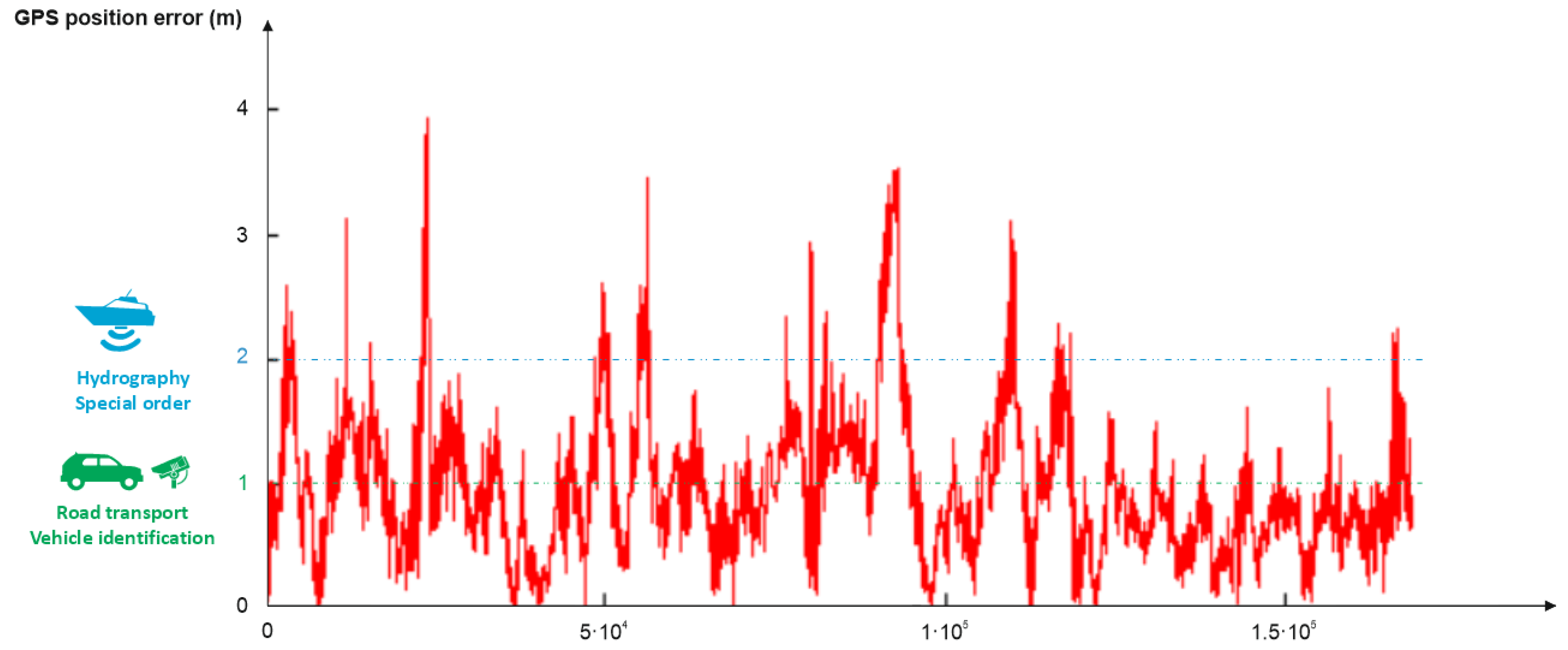
Research on distributions of life times began with the analysis of GPS position error results. A recording session of 168′286 fixes was studied. This can be considered statistically representative, according to the analyses conducted in [37]. Figure 7 presents the graph of the position error as a function of time. The figure also shows two accuracy values (1 m and 2 m), which correspond to the requirements of road transport for vehicle identification and hydrography for special order.
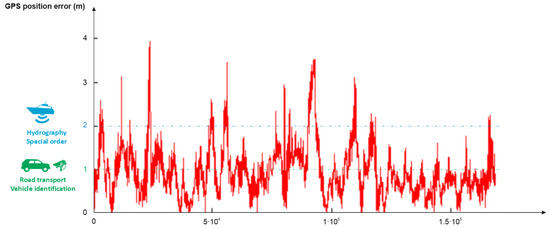
Figure 7.
GPS position error as a function of time (168′286 fixes) and two decision thresholds corresponding to the requirements of road transport for vehicle identification and hydrography for special order.
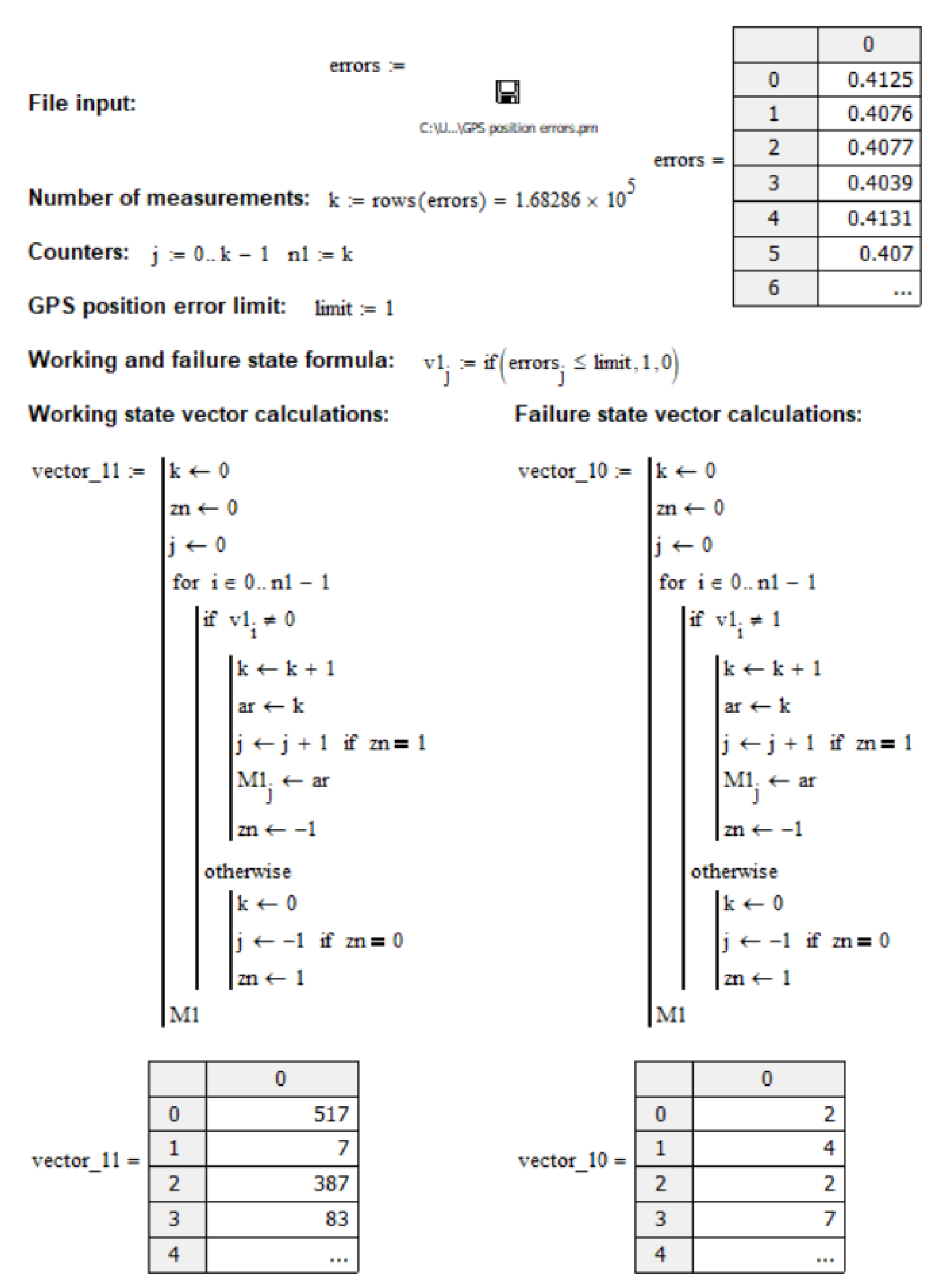
To automate the process of determining life and failure times, the position error values needed to be assigned to one of the operational statuses: 1 (life status, when the temporary position error is below a pre-set limit value) or 0 (failure status, in the opposite case) at any point in time. For this purpose, a calculation sheet was prepared in Mathcad 15 (Figure 8).
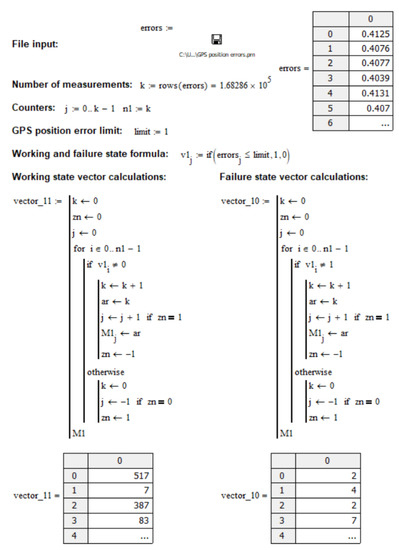
Figure 8.
Mathcad worksheet for determining life and failure times based on the GPS 2013 measurement campaign.
In the sheet shown in Figure 8, the calculations began with importing measurement data consisting of position errors. The position error limit was then determined arbitrarily. In the worksheet, it is 1m. Next, two vectors were created consisting of life (vector_11) and failure (vector_10) times.
Both vectors were saved as text files and then uploaded to the EasyFit software, where they were analysed for fit to typical statistical distributions. These distributions included: beta, Cauchy, chi-square, exponential, gamma, Laplace, logistic, lognormal, normal, Pareto, Rayleigh, Student’s and Weibull.
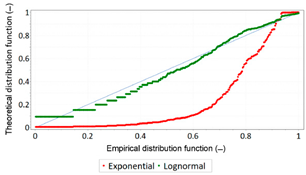
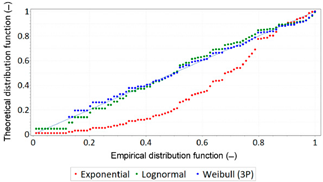
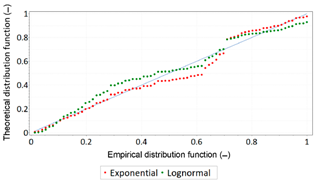
For GPS position errors, calculations were carried out for two variants, 1 m and 2 m, corresponding to example navigation applications such as from road transport for vehicle identification (1 m) and hydrography for special order (2 m). In P-P plots, the empirical probability distribution function is plotted against the theoretical distribution. The observations are first sorted in descending order. The i-th observation is then plotted on one axis as (i.e., the value of the observed cumulative distribution) and the other axis as F(xi), where F(xi) is the value of the theoretical probability distribution function for respective observation xi. If the theoretical cumulative distribution is a good approximation of the empirical distribution, then the points on the diagram should be close to the diagonal.
The research began with an analysis of GPS failure times. The results of P-P plot analyses are presented in Table 1. Moreover, the list of theoretical distributions with the best (top) and worst fit can be seen next to each of the graphs.

Table 1.
P-P plots of life and failure times for empirical GPS position errors (1 m and 2 m).
The analyses show that the assumption (very common in technology) that the life and failure times follow exponential distribution is questionable. It is clear that, for distribution function, values below 0.9 (both empirical and theoretical) are poorly fitted. On the contrary, above this value the fit is very good, which may suggest that the failure (λ) and renewal (μ) rates can be calculated very reliably on its basis. It has also been stressed that it is not an exponential distribution but a lognormal distribution that provides a very good approximation of the life and failure time statistics. Furthermore, analyses performed on two different decision thresholds (1 m and 2 m) produced similar conclusions regarding the mismatch between the empirical and theoretical (exponential) distributions for distribution function values below 0.9.
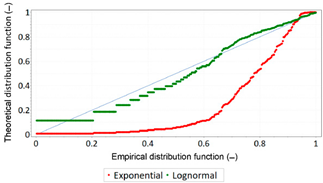
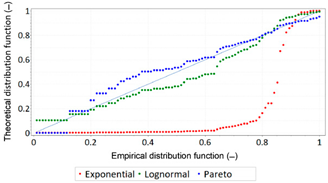
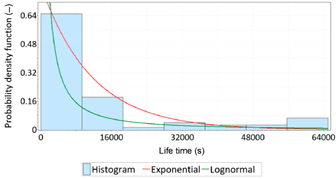
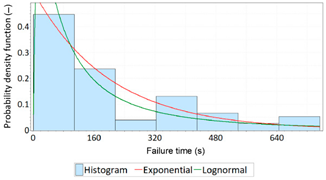
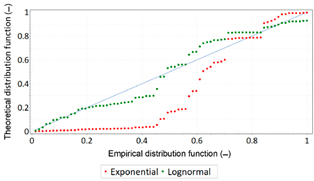
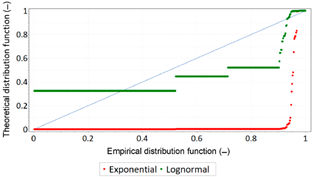
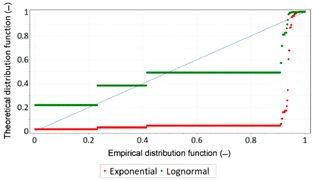
Therefore, it is reasonable to conduct identical analyses for other navigation positioning systems such as DGPS and EGNOS. These analyses have been performed for a very large sample of 900′000 fixes. Table 2 presents the PDFs of life and failure times, together with the best-fit distributions for the DGPS system. Moreover, Table 2 shows the P-P plots for DGPS and EGNOS systems.
Table 2.
Statistical analysis of life and failure times for empirical DGPS and EGNOS position errors (1 m).
The distribution of DGPS system life and failure times is similar to that of GPS, although empirical data fit theoretical exponential distribution much better. On the contrary, for EGNOS it is clear that the empirical distributions of life and failure times deviate significantly from the theoretical distributions. However, as in the case of GPS and DGPS systems, for values above 0.9, the fit is very good.
The following conclusions can be drawn from the empirical studies and theoretical analyses carried out:
- The analysis of GPS data indicates that the lognormal distribution reflects the course of the PDF of life and failure times determined for navigation system position errors significantly better than the exponential distribution;
- For values above 0.9, the fit between theoretical and empirical distributions (exponential distribution) is very good in all the analysed cases;
- The results obtained from the GPS system also prove that increasing the decision threshold from 1 m to 2 m causes a previously predictable change in the distributions of life and failure times, which does not explicitly prove that this will affect the final results of positioning accuracy calculations;
- Similarly, as in the case of GPS and DGPS systems, EGNOS exhibits similar properties when it comes to fit between the normal distribution and the empirical data.
The next research stage was to determine the failure and renewal rates of the renewal process. Both of these values made it possible to determine the course of the availability function calculated for an arbitrary position error.
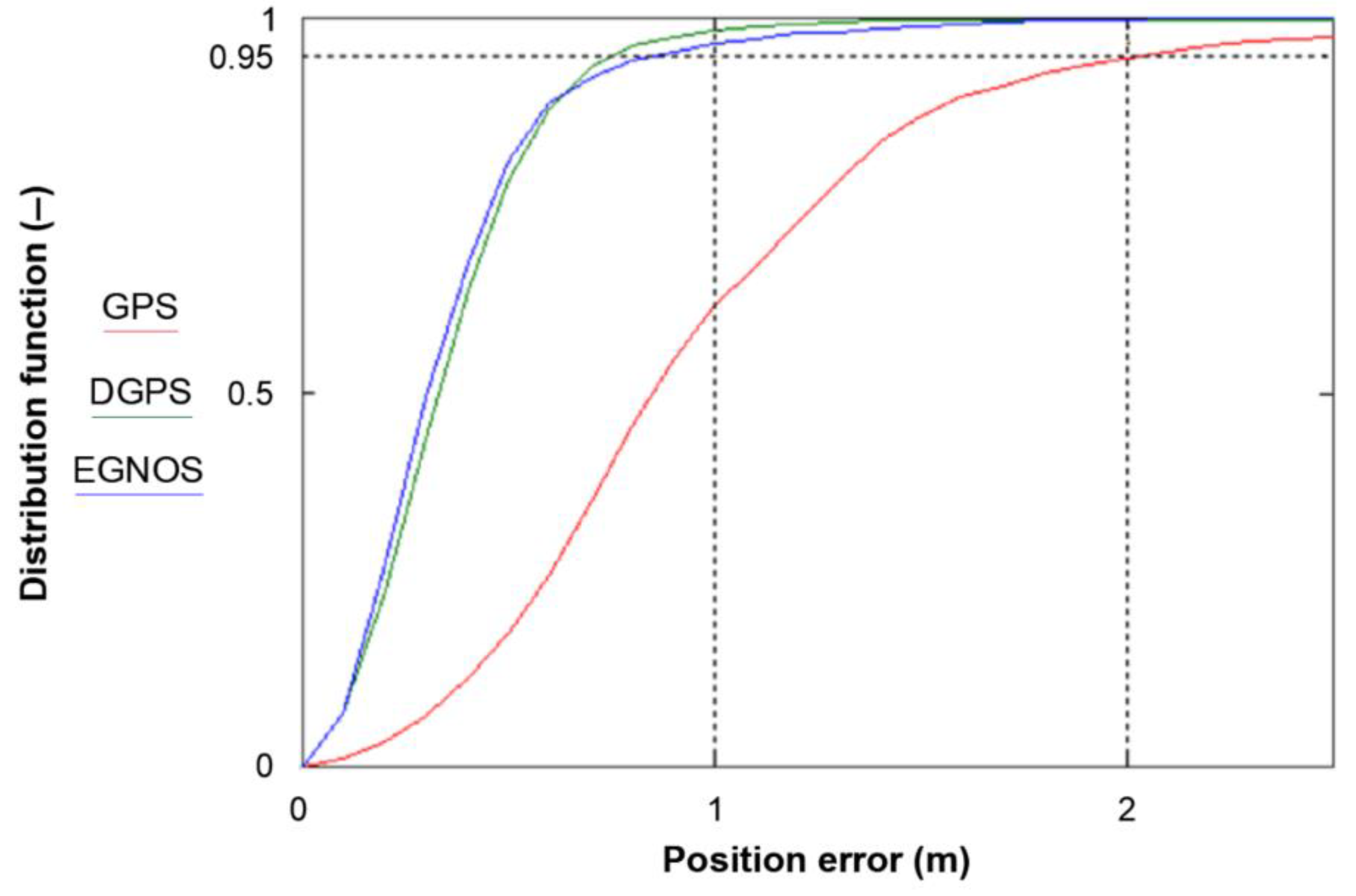
Finally, to present the position error distribution functions of the GPS, DGPS and EGNOS systems, repeated calculations of the probability value corresponding to a given position error value ware performed. It has been assumed that to determine the distribution function, the position error value was increased from 0, every 0.1 m, up to 4 m. The course of distribution functions calculated based on the reliability model is presented in Figure 9.
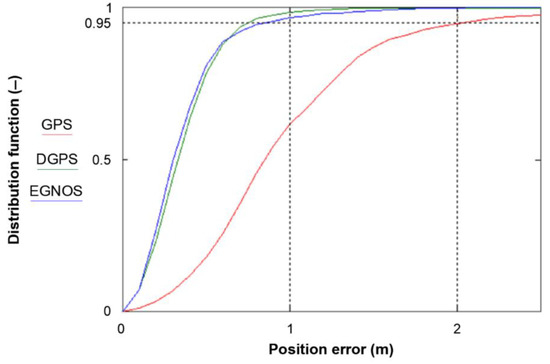
Figure 9.
Position error distribution functions of the GPS, DGPS and EGNOS systems calculated using the reliability model.
Please note that the DGPS and EGNOS systems achieved positioning accuracies below 1 m (p = 0.95) on a very large and probably representative sample. Therefore, it is concluded that both systems can be successfully used in navigation applications requiring positioning accuracies of 1 m (p = 0.95), even though the official system characteristics given in [57] are 3 m (p = 0.95) horizontally and 4 m (p = 0.95) vertically.
It needs to be particularly emphasised here that it is not the purpose of this article to establish the actual value of the position error of the studied systems, including the EGNOS system. This paper aims to propose a new reliability model which will allow, as an alternative to the classical method using the 2DRMS value, one to determine the navigation system positioning accuracy and the corresponding probability.
4. Discussion
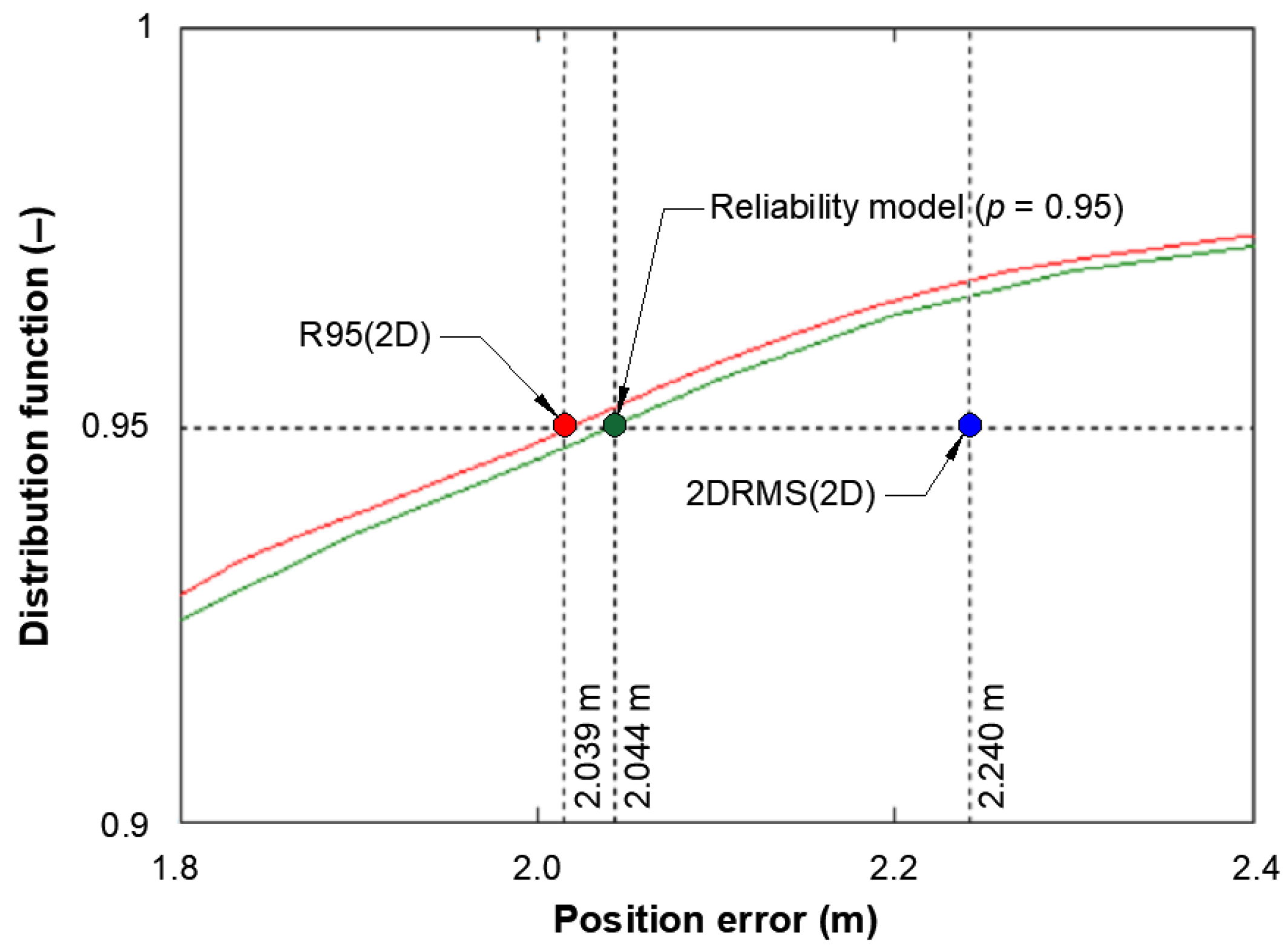
The presented reliability model requires an assessment of its accuracy. This can only be carried out in relation to calculations performed directly on empirical (real) values. The most reliable method of determining the position error value larger than 95% of the population of the remaining errors is to calculate it by sorting the errors from the smallest to the largest. This method of error determination is used in several publications [30,32,33]. There is no doubt that with a very large number of measurements this method produces the most reliable results because it does not assume any statistical distribution of empirical position errors. Therefore, to assess which of the two models (classical or reliability) is closer to the true value, the R95 value obtained by the method of sorting the position errors was used.
There are two curves presented in Figure 10. The first curve is the empirical distribution function of the sorted position errors (red) from the GPS system, which takes the value of 2.039 m (p = 0.95). This is an R95 value that can be considered close to true due to a large number of measurements (168′286 fixes). The distribution function calculated from the proposed reliability model (green) reaches a value of 2.044 m (p = 0.95). In contrast, the 2DRMS value calculated in the classical way (blue) takes the value of 2.240 m (p = 0.95).
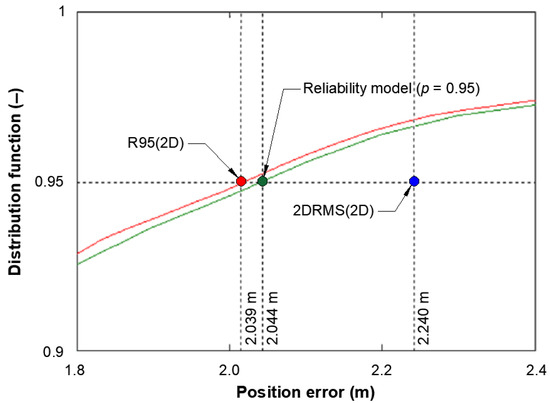
Figure 10.
Comparison of three methods for calculating position error values larger than 95% of the population of remaining errors. Analysis of results for the GPS system.
From Figure 10, it follows that a much better approximation of the R95 value was obtained by applying the reliability model than by using the 2DRMS measure.
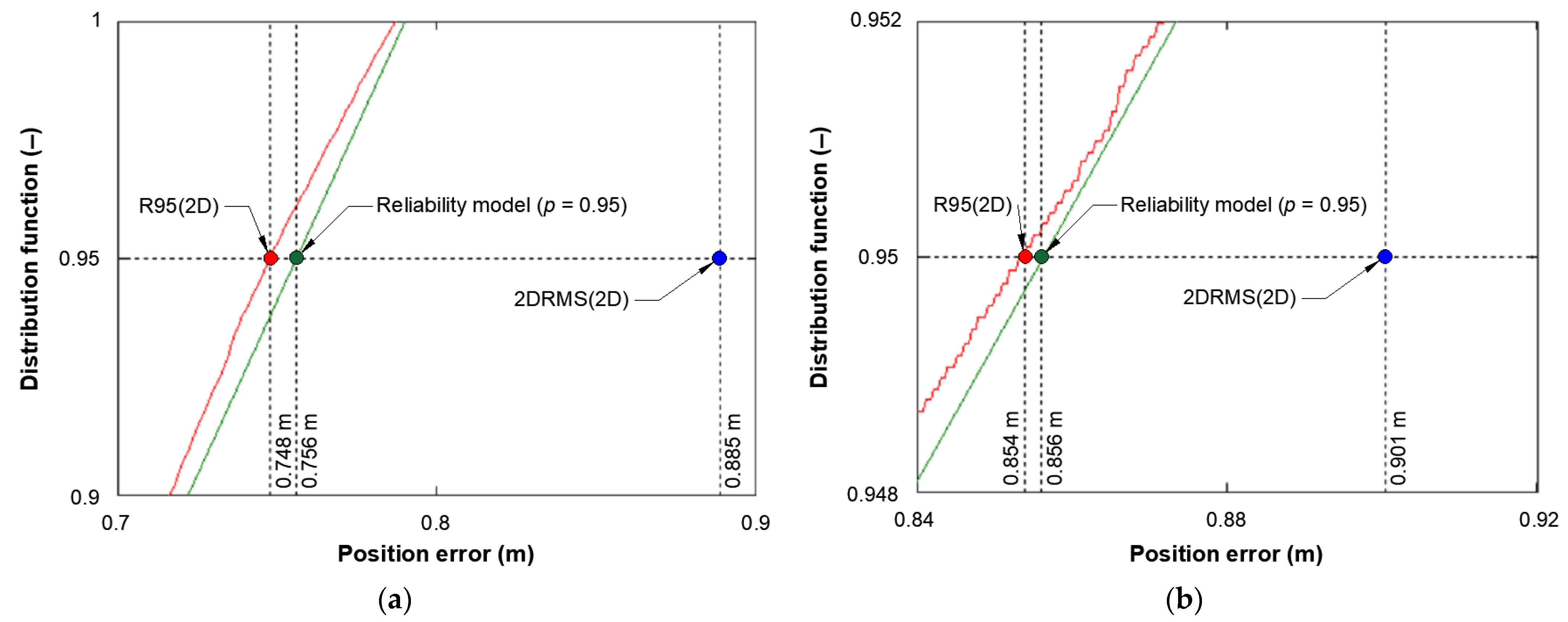
To verify the accuracy of the reliability method on systems other than GPS, an identical analysis was performed for DGPS and EGNOS systems. It needs to be emphasised that, because the calculations used a very large sample of 900′000 fixes, the results can be considered reliable and representative (Figure 11).
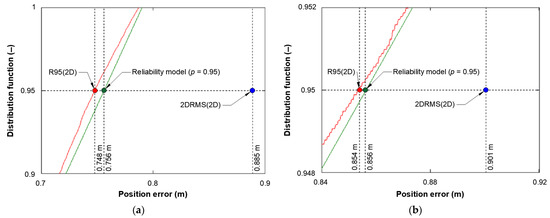
Figure 11.
Comparison of three methods for calculating position error value larger than 95% of the population of the remaining errors. Analysis of results for: (a) DGPS; (b) EGNOS.
Empirical distribution function graphs (obtained by position error sorting) and those obtained based on the reliability model, for DGPS and EGNOS systems, prove that the reliability model provided a better approximation of the true value than the commonly used 2DRMS measure. For the DGPS system, the value considered to be the true R95 was 0.748 m. Calculation using the reliability model yielded 0.756 m (p = 0.95), while the 2DRMS measure was 0.885 m. The same is true for the EGNOS system. The value of the R95 was 0.854 m and the value calculated using the reliability model was 0.856 m, whereas the value of the 2DRMS was 0.901 m. Please note that many authors [29] have already noted the overestimation of the actual values by the 2DRMS measure, which is confirmed by the results presented in Figure 10 and Figure 11. Therefore, it may be concluded that the proposed reliability model calculates the R95 value much more accurately than the classical model.
5. Conclusions
This paper proposes a new method, an alternative to the classical solution based on the 2DRMS measure, for determining navigation system positioning accuracy, which, in its essence, is based on the reliability model. The random variables are life and failure times in the positioning process, and not, as was the case in the classical model, the position errors. This method can be successfully used in assessing the suitability of a positioning system for a specific navigation application. It allows for the calculation of the system’s position error with a probability of 95% more accurately than using the classical approach. The method was applied to determine the positioning accuracy of modern navigation systems: GPS (168′286 fixes), DGPS (900′000 fixes) and EGNOS (900′000 fixes). Although empirical distributions of life and failure times differ from the theoretical exponential distribution (for distribution functions with a probability below 0.9), the method provides high accuracy of the final results. An additional advantage of this method lies in the rather simple calculation algorithm.
What was a surprising result of this research was that the lognormal distribution presented a very good fit to the empirical data on life and failure times of all three systems (GPS, DGPS and EGNOS). This requires additional analysis in future research.
Tests conducted on very large measurement samples have proven that the proposed method provides a much more precise determination of positioning accuracy in navigation systems compared to the 2DRMS measure. Thanks to its application, it is possible to determine the position error distribution of the navigation system more precisely, as well as to indicate applications that can be used by this system, ensuring the safety of the navigation process.
It should be noted that the proposed method is not limited only to navigation positioning systems. With minor modifications, it can be successfully applied to the applications listed in Figure 1, which all differ in positioning accuracy and availability. The R95 measure, which was used to compare two models (classical or reliability), is a narrow scope of application. It is intended to determine the position error value for a strictly defined confidence level of 95%.
Funding
This research was funded from the statutory activities of Gdynia Maritime University, grant number WN/2021/PZ/05.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The author declares no conflict of interest.
References
- Brodin, G.; Cooper, J.; Walsh, D.; Stevens, J. The Effect of Helicopter Rotors on GPS Signal Reception. J. Navig. 2005, 58, 433–450. [Google Scholar] [CrossRef]
- Krasuski, K.; Ciećko, A.; Bakuła, M.; Wierzbicki, D. New Strategy for Improving the Accuracy of Aircraft Positioning Based on GPS SPP Solution. Sensors 2020, 20, 4921. [Google Scholar] [CrossRef]
- Krasuski, K.; Savchuk, S. Accuracy Assessment of Aircraft Positioning Using the Dual-frequency GPS Code Observations in Aviation. Commun. Sci. Lett. Univ. Zilina 2020, 22, 23–30. [Google Scholar] [CrossRef] [Green Version]
- Lachapelle, G.; Cannon, M.E.; Qiu, W.; Varner, C. Precise Aircraft Single-point Positioning Using GPS Post-mission Orbits and Satellite Clock Corrections. J. Geod. 1996, 70, 562–571. [Google Scholar] [CrossRef]
- Ochieng, W.Y.; Sauer, K.; Walsh, D.; Brodin, G.; Griffin, S.; Denney, M. GPS Integrity and Potential Impact on Aviation Safety. J. Navig. 2003, 56, 51–65. [Google Scholar] [CrossRef]
- Elhajj, M.; Ochieng, W. Impact of New GPS Signals on Positioning Accuracy for Urban Bus Operations. J. Navig. 2020, 73, 1284–1305. [Google Scholar] [CrossRef]
- MacLean, G. Weak GPS Signal Detection in Animal Tracking. J. Navig. 2009, 62, 1–21. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Jiménez, F.; Aparicio, F.; Zato, J. GPS and Inertial Systems for High Precision Positioning on Motorways. J. Navig. 2009, 62, 351–363. [Google Scholar] [CrossRef]
- Ojeda, L.; Borenstein, J. Non-GPS Navigation for Security Personnel and First Responders. J. Navig. 2007, 60, 391–407. [Google Scholar] [CrossRef] [Green Version]
- Sun, Q.C.; Odolinski, R.; Xia, J.C.; Foster, J.; Falkmer, T.; Lee, H. Validating the Efficacy of GPS Tracking Vehicle Movement for Driving Behaviour Assessment. Travel Beh. Soc. 2017, 6, 32–43. [Google Scholar] [CrossRef]
- Bhatti, J.; Humphreys, T.E. Hostile Control of Ships via False GPS Signals: Demonstration and Detection. Navig. J. Inst. Navig. 2017, 64, 51–66. [Google Scholar] [CrossRef]
- Glomsvoll, O.; Bonenberg, L.K. GNSS Jamming Resilience for Close to Shore Navigation in the Northern Sea. J. Navig. 2017, 70, 33–48. [Google Scholar] [CrossRef] [Green Version]
- Han, J.; Park, J.; Kim, J.; Son, N.-S. GPS-less Coastal Navigation Using Marine Radar for USV Operation. IFAC-Papers OnLine 2016, 49, 598–603. [Google Scholar] [CrossRef]
- Ramesh, R.; Jyothi, V.B.N.; Vedachalam, N.; Ramadass, G.A.; Atmanand, M.A. Development and Performance Validation of a Navigation System for an Underwater Vehicle. J. Navig. 2016, 69, 1097–1113. [Google Scholar] [CrossRef] [Green Version]
- Specht, C. Radio Navigation Systems: Definitions and Classifications. J. Navig. 2021, 74, 945–954. [Google Scholar] [CrossRef]
- EC. European Radio Navigation Plan; Version 1.1; EC: Luxembourg, 2018. [Google Scholar]
- GLA. GLA Radio Navigation Plan; GLA: London, UK, 2007. [Google Scholar]
- SMA. Swedish Radio Navigation Plan, Policy and Plans; SMA: Norrköping, Sweden, 2009. [Google Scholar]
- U. S. DoD. 2019 Federal Radionavigation Plan; U.S. DoD: Springfield, VA, USA, 2019. [Google Scholar]
- GSA. Report on Rail User Needs and Requirements; Version 1.0; GSA: Prague, Czech Republic, 2018. [Google Scholar]
- IALA. NAVGUIDE 2018 Marine Aids to Navigation Manual, 8th ed.; IALA: Saint-Germain-en-Laye, France, 2018. [Google Scholar]
- ICAO. Convention on International Civil Aviation of 7th December 1944; ICAO: Montreal, QC, Canada, 1944. [Google Scholar]
- IHO. IHO Standards for Hydrographic Surveys; Special Publication No. 44, 6th ed.; IHO: Monaco, Monaco, 2020. [Google Scholar]
- Reid, T.G.R.; Houts, S.E.; Cammarata, R.; Mills, G.; Agarwal, S.; Vora, A.; Pandey, G. Localization Requirements for Autonomous Vehicles. In Proceedings of the WCX SAE World Congress Experience 2019, Detroit, MI, USA, 9–11 April 2019. [Google Scholar]
- Specht, C. System GPS; Bernardinum Publishing House: Pelplin, Poland, 2007. (In Polish) [Google Scholar]
- Specht, M. Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders. Sensors 2019, 19, 3860. [Google Scholar] [CrossRef] [Green Version]
- Bowditch, N. American Practical Navigator, 2019 ed.; Paradise Cay Publications: Blue Lake, CA, USA, 2019; Volumes 1–2. [Google Scholar]
- U.S. DoD. Global Positioning System Standard Positioning Service Signal Specification, 1st ed.; U.S. DoD: Arlington County, VA, USA, 1993. [Google Scholar]
- Van Diggelen, F. GPS Accuracy: Lies, Damn Lies, and Statistics. GPS World 1998, 9, 1–6. [Google Scholar]
- Specht, C.; Pawelski, J.; Smolarek, L.; Specht, M.; Dąbrowski, P. Assessment of the Positioning Accuracy of DGPS and EGNOS Systems in the Bay of Gdansk Using Maritime Dynamic Measurements. J. Navig. 2019, 72, 575–587. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise Positioning with Current Multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2021, 5, 8328. [Google Scholar] [CrossRef]
- Specht, C.; Dąbrowski, P.S.; Pawelski, J.; Specht, M.; Szot, T. Comparative Analysis of Positioning Accuracy of GNSS Receivers of Samsung Galaxy Smartphones in Marine Dynamic Measurements. Adv. Space Res. 2019, 63, 3018–3028. [Google Scholar] [CrossRef]
- Szot, T.; Specht, C.; Specht, M.; Dabrowski, P.S. Comparative Analysis of Positioning Accuracy of Samsung Galaxy Smartphones in Stationary Measurements. PLoS ONE 2019, 14, e0215562. [Google Scholar] [CrossRef]
- NovAtel Positioning Leadership. GPS Position Accuracy Measures. Available online: https://www.novatel.com/assets/Documents/Bulletins/apn029.pdf (accessed on 2 November 2021).
- Specht, M. Consistency Analysis of Global Positioning System Position Errors with Typical Statistical Distributions. J. Navig. 2021, 1–18. [Google Scholar] [CrossRef]
- Specht, M. Consistency of the Empirical Distributions of Navigation Positioning System Errors with Theoretical Distributions—Comparative Analysis of the DGPS and EGNOS Systems in the Years 2006 and 2014. Sensors 2021, 21, 31. [Google Scholar] [CrossRef]
- Specht, M. Statistical Distribution Analysis of Navigation Positioning System Errors—Issue of the Empirical Sample Size. Sensors 2020, 20, 7144. [Google Scholar] [CrossRef]
- Cardano, G. The Book on Games of Chance; Princeton University Press: Princeton, NJ, USA, 1953. [Google Scholar]
- Bellhouse, D. Decoding Cardano’s Liber de Ludo Aleae. Hist. Math. 2005, 32, 180–202. [Google Scholar] [CrossRef] [Green Version]
- Huygens, C. De Ratiociniis in Ludo Aleae. In Francisci a Schooten Exercitationum Mathematicarum libri Quinque; van Schooten, F., Ed.; Elsevier: Leiden, Netherlands, 1657; pp. 517–524. [Google Scholar]
- Laplace, P.S. Théorie Analytique des Probabilités; Courcier: Paris, France, 1812. (In French) [Google Scholar]
- Kolmogorov, A. Sulla Determinazione Empirica di una Legge di Distribuzione. Giornale dell’Istituto Italiano degli Attuari 1933, 4, 83–91. (In Italian) [Google Scholar]
- Montgomery, D.C.; Runger, G.C. Applied Statistics and Probability for Engineers, 5th ed.; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2010. [Google Scholar]
- Hong, Y. Probability and Statistics for Economists; World Scientific: Singapore, 2017. [Google Scholar]
- Baron, M. Probability and Statistics for Computer Scientists, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Mertikas, S.P. Error Distributions and Accuracy Measures in Navigation: An Overview. Available online: https://unbscholar.lib.unb.ca/islandora/object/unbscholar%3A8708 (accessed on 2 November 2021).
- Kendall, M.G.; Buckland, W.R. A Dictionary of Statistical Terms, 4th ed.; Longman: Harlow, UK, 1982. [Google Scholar]
- Feller, W. An Introduction to Probability Theory and its Applications, 3rd ed.; John Wiley & Sons Inc: Hoboken, NJ, USA, 1968; Volume 1. [Google Scholar]
- Specht, C.; Rudnicki, J. A Method for the Assessing of Reliability Characteristics Relevant to an Assumed Position-fixing Accuracy in Navigational Positioning Systems. Pol. Marit. Res. 2016, 23, 20–27. [Google Scholar] [CrossRef] [Green Version]
- Barlow, R.E.; Proschan, F. Statistical Theory of Reliability and Life Testing: Probability Models; Holt, Rinehart and Winston: New York, NY, USA, 1974. [Google Scholar]
- Specht, C. Availability, Reliability and Continuity Model of Differential GPS Transmission. Annu. Navig. 2003, 5, 1–85. [Google Scholar]
- U.S. DoD. Global Positioning System Standard Positioning Service Performance Standard, 5th ed.; U.S. DoD: Arlington County, VA, USA, 2020. [Google Scholar]
- IALA. Performance and Monitoring of DGNSS Services in the Frequency Band 283.5-325kHz; IALA: Saint-Germain-en-Laye, France, 2015. [Google Scholar]
- Ketchum, R.L.; Lemmon, J.J.; Hoffman, J.R. Site Selection Plan and Installation Guidelines for a Nationwide Differential GPS Service; ITS: Boulder, CO, USA, 1997. [Google Scholar]
- GSA. EGNOS Open Service (OS) Service Definition Document; Version 2.3; GSA: Prague, Czech Republic, 2017. [Google Scholar]
- Keefe, R.F.; Wempe, A.M.; Becker, R.M.; Zimbelman, E.G.; Nagler, E.S.; Gilbert, S.L.; Caudill, C.C. Positioning Methods and the Use of Location and Activity Data in Forests. Forests 2019, 10, 458. [Google Scholar] [CrossRef] [Green Version]
- EC-DG Enterprise and Industry. EGNOS Safety of Life (SoL) Service Definition Document; Version 3.3; EC-DG Enterprise and Industry: Brussels, Belgium; Luxembourg, 2019. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).