
An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module

 , ,
, ,
Abstract
:
1. Introduction
2. Conventional Robust Adaptive Extended Kalman Filter
3. The Proposed Improved Robust Adaptive Kalman Filter
3.1. System Overview
3.2. Improvement Algorithm
3.2.1. Scaling Factor Based on GNSS Solution State
3.2.2. Adaptive Factor Based on the Mahalanobis Distance
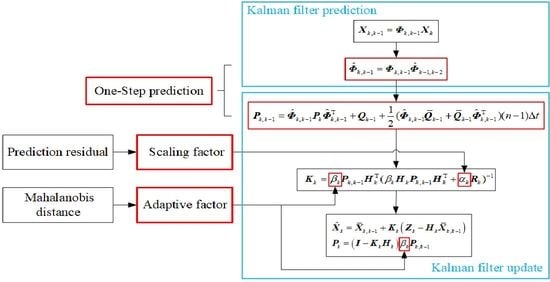
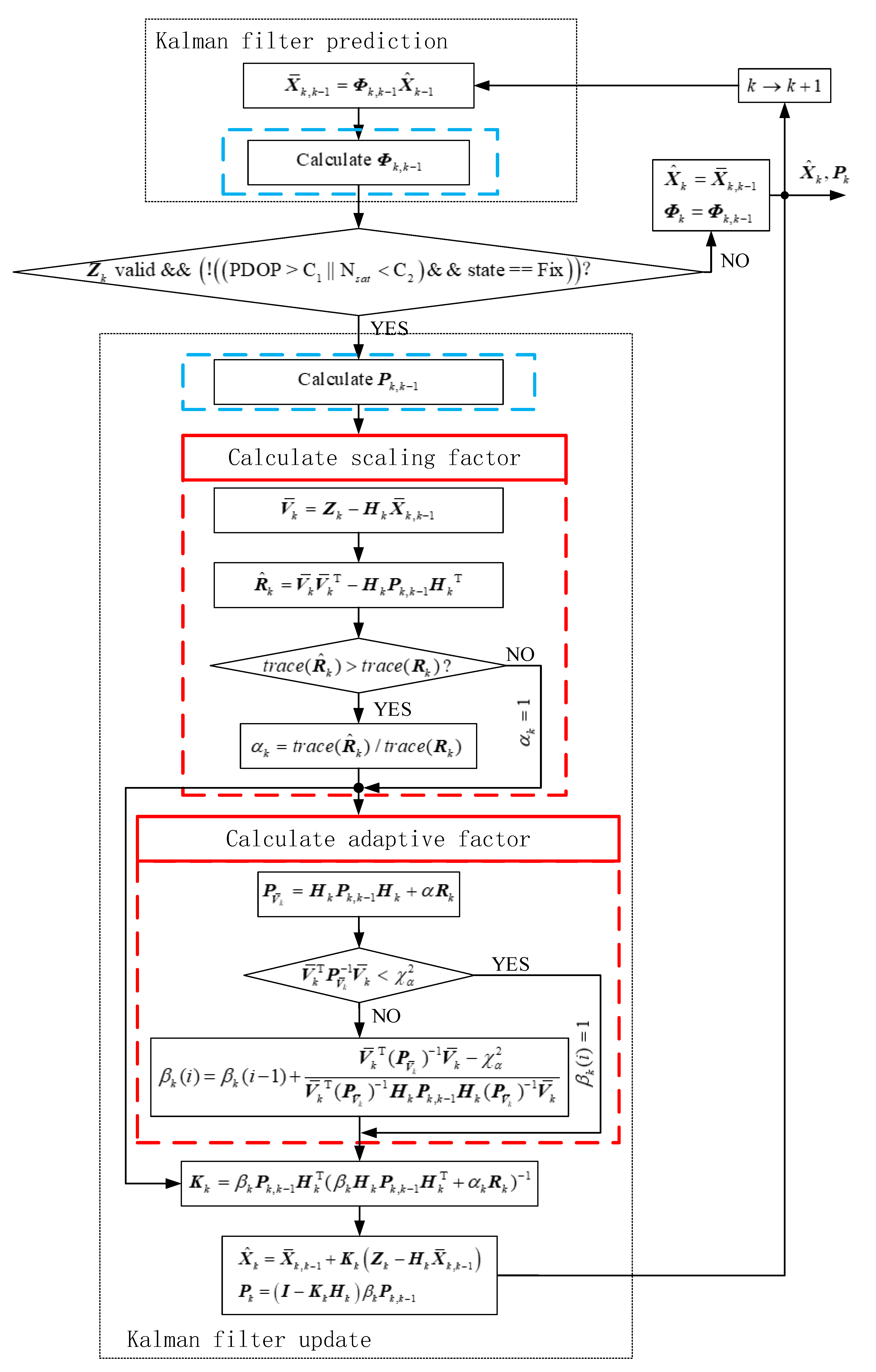
3.2.3. One-Step Prediction Kalman Filter Model
4. Experimental Route and Hardware Platform
5. Results
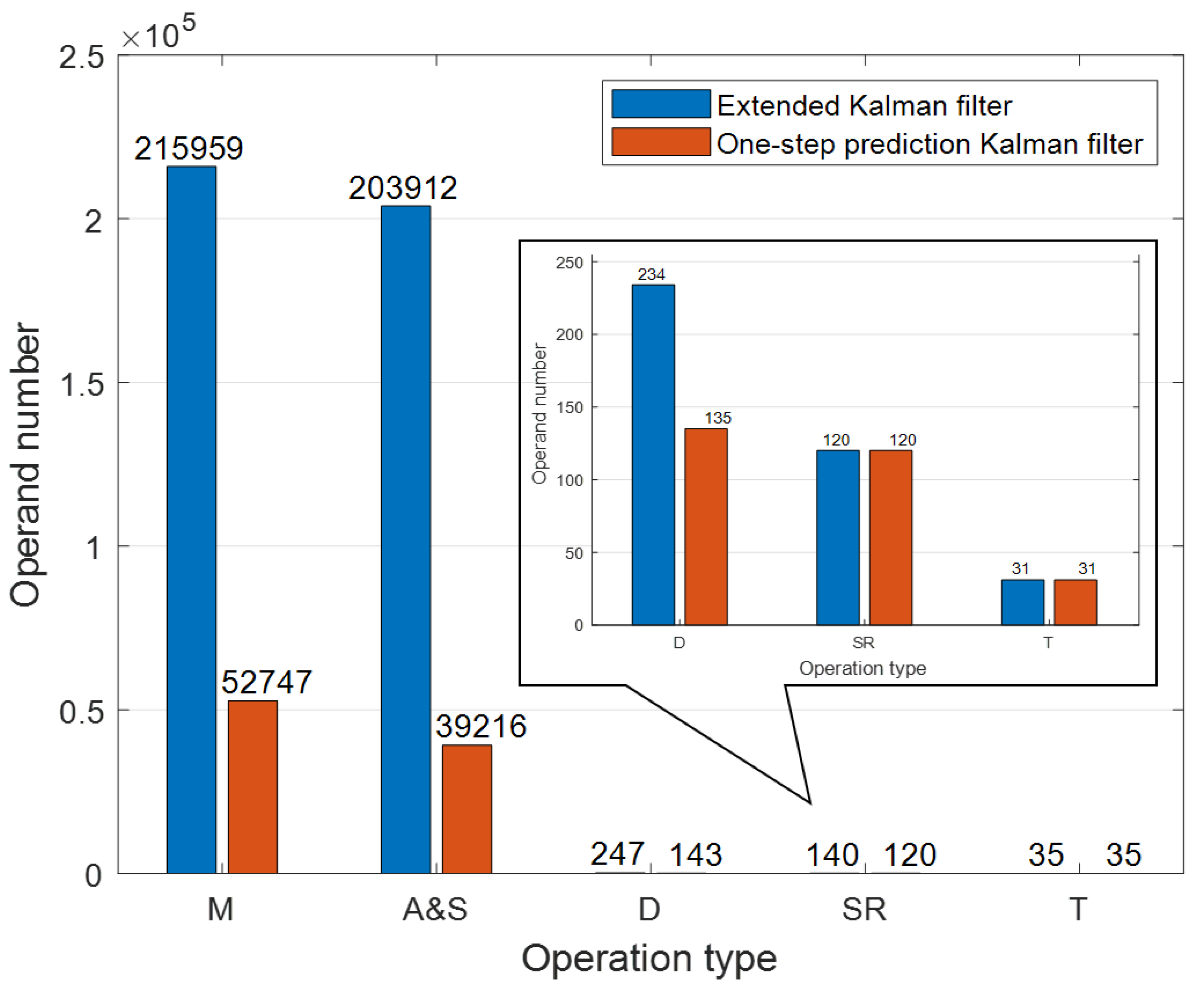
5.1. Operands Analysis and Comparison
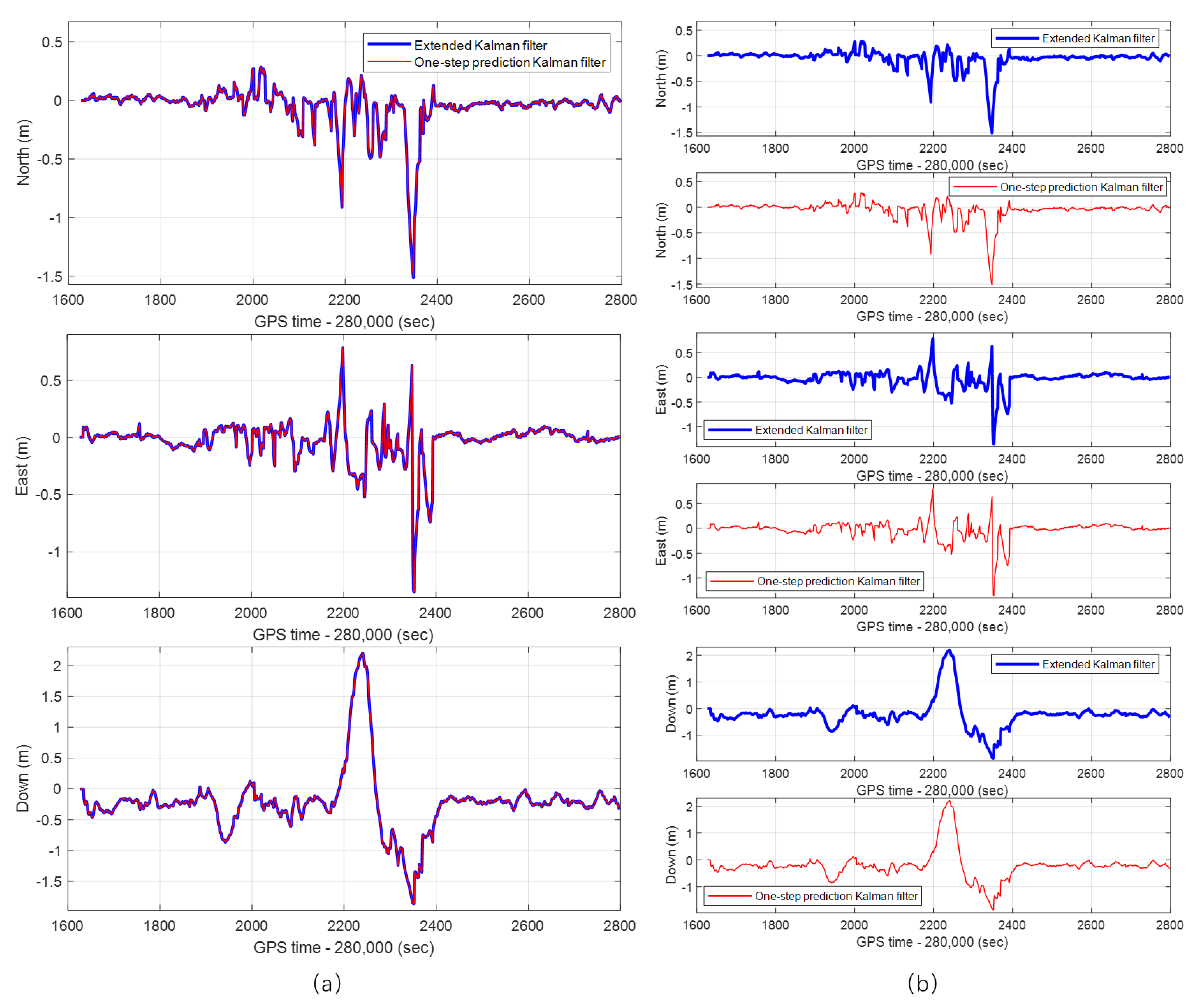
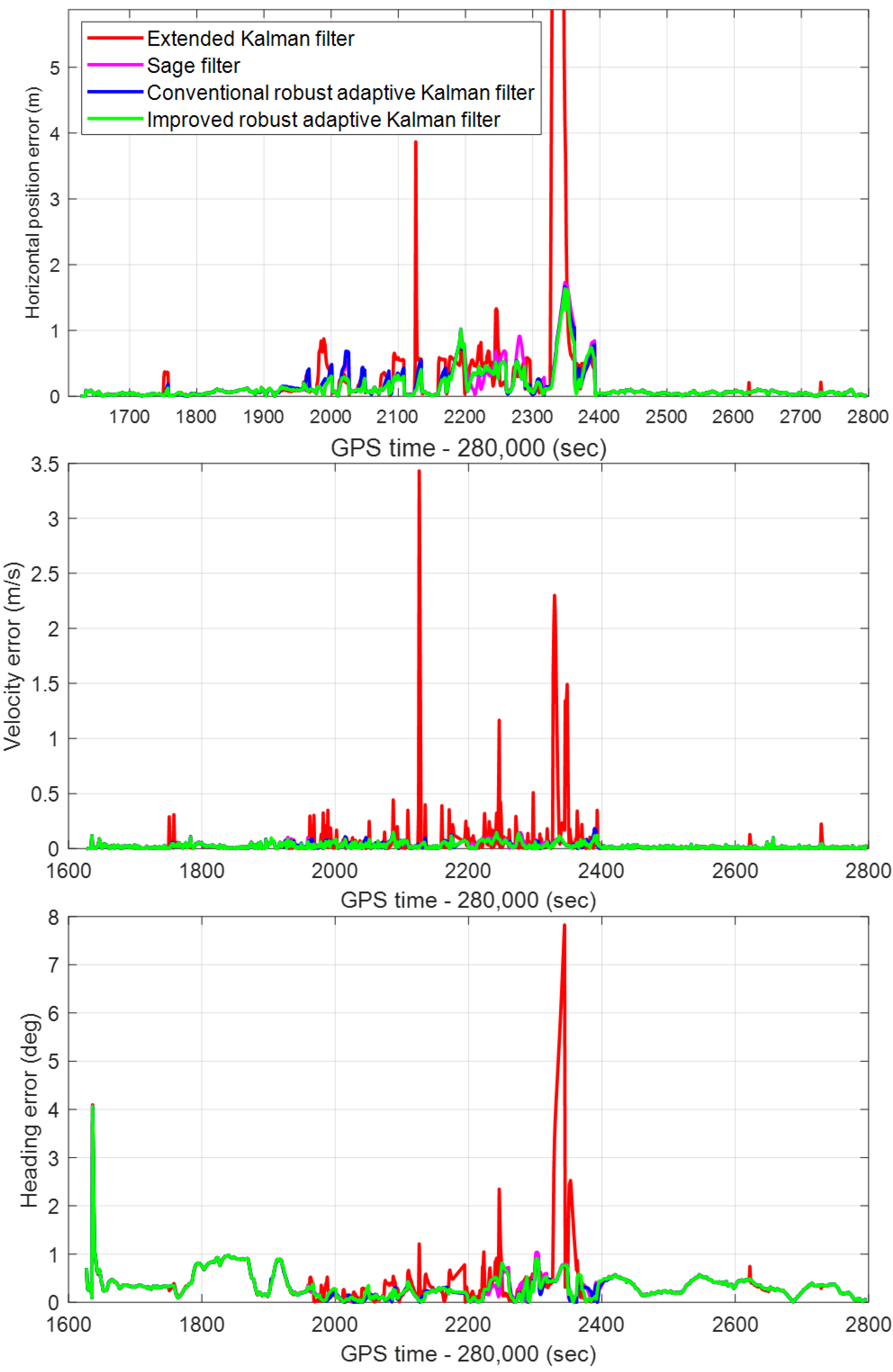
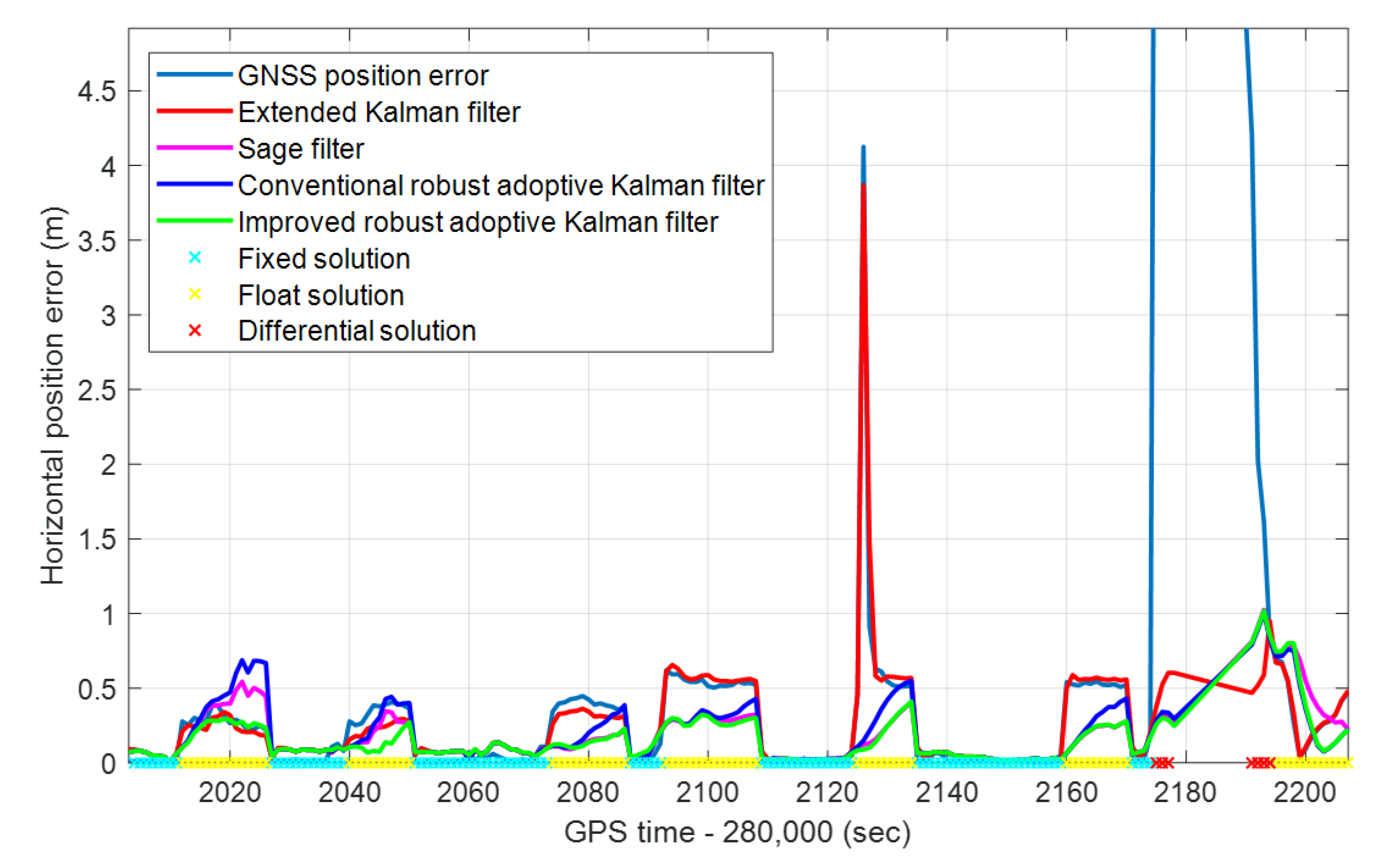
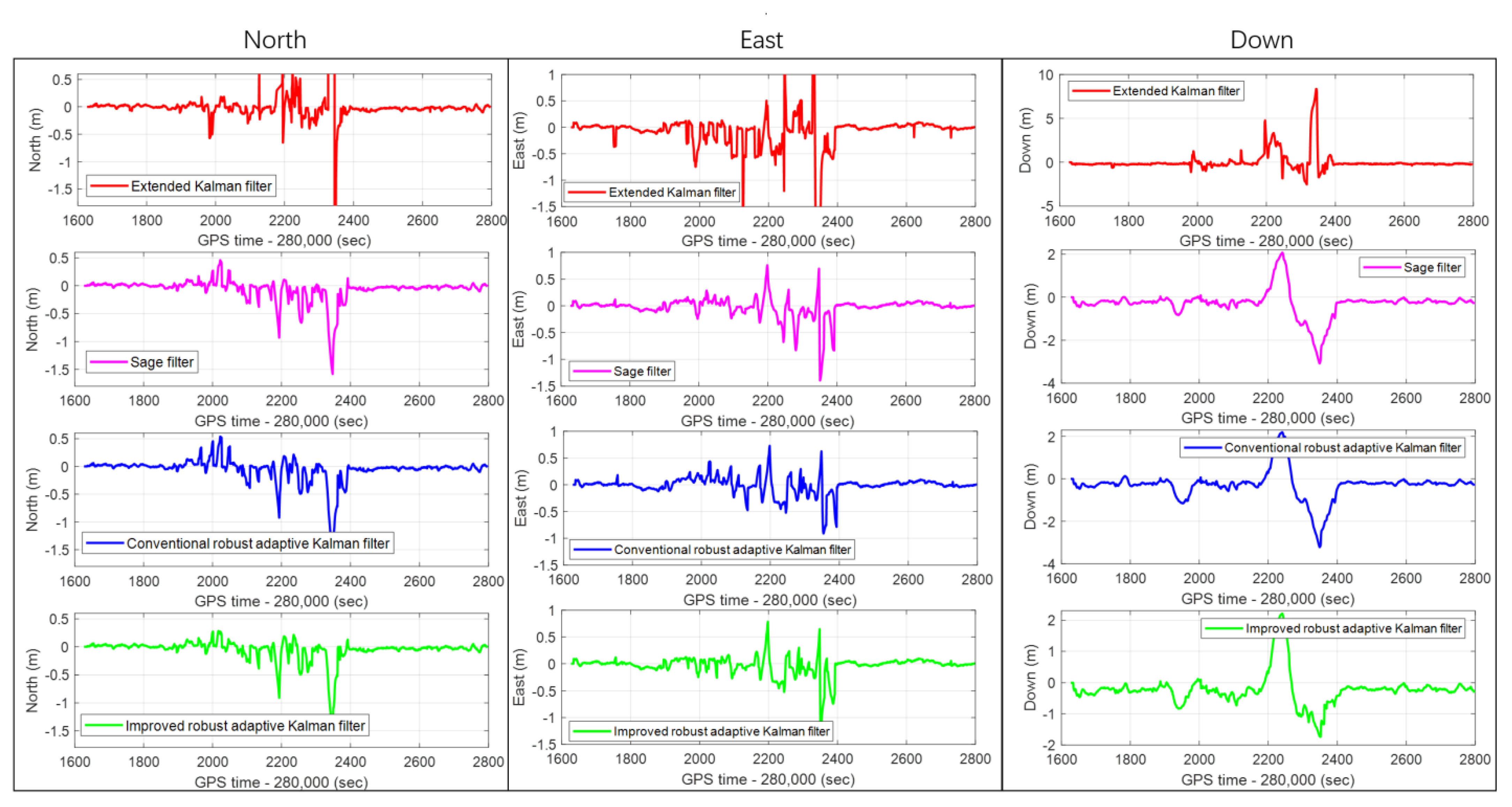
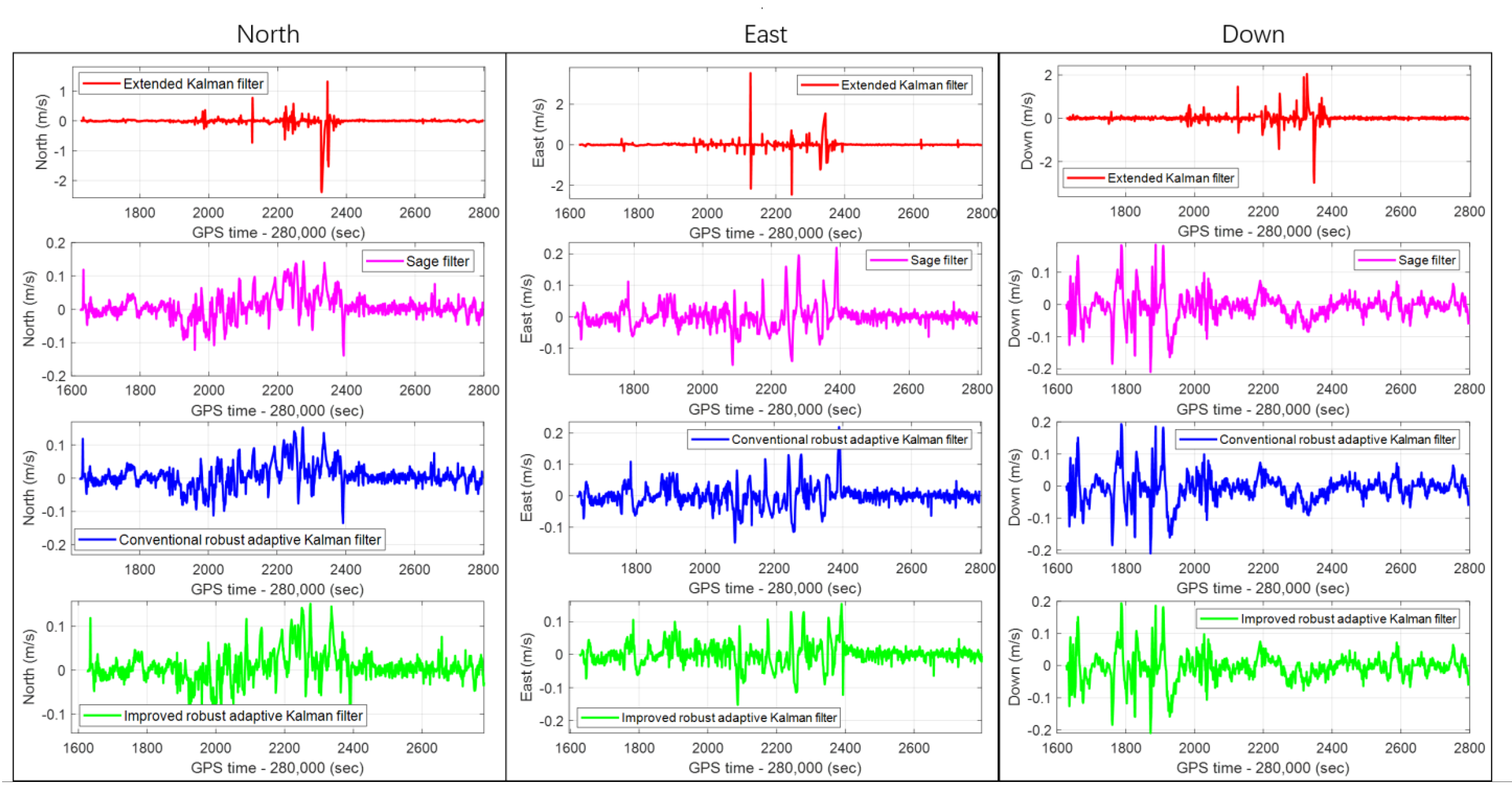
5.2. Performance Verification
5.3. Comparison with Other Filtering Algorithms
5.4. Real-Time Power Consumption Verification and Comparision
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grewal, M.; Andrews, A.; Bartone, C. Global Navigation Satellite Systems, Inertial Navigation, and Integration; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Hegarty, C. Understanding GPS Principles and Applications; Artech House Publishers: Boston, MA, USA, 2005. [Google Scholar]
- Gallon, E.; Joerger, M.; Pervan, B. Development of Stochastic IMU Error Models for INS/GNSS Integration. In Proceedings of Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MI, USA, 20–24 September 2021; pp. 2565–2577. [Google Scholar]
- Shin, E.H. Estimation Techniques for Low-Cost Inertial Navigation. Ph.D. Thesis, The University of Calgary, Calgary, AB, Canada, 2005. [Google Scholar]
- Hu, S.; Xu, S.; Wang, D.; Zhang, A. Optimization Algorithm for Kalman Filter Exploiting the Numerical Characteristics of SINS/GPS Integrated Navigation Systems. Sensors 2015, 15, 28402–28420. [Google Scholar] [CrossRef]
- Niu, X.; Zhang, Q.; Gong, L.; Liu, C.; Zhang, H.; Shi, C.; Wang, J.; Coleman, M. Development and evaluation of GNSS/INS data processing software for position and orientation systems. Surv. Rev. 2015, 47, 87–98. [Google Scholar] [CrossRef]
- Chang, G. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Zhao, L.; Qiu, H.; Feng, Y. Analysis of a robust Kalman filter in loosely coupled GPS/INS navigation system. Measurement 2016, 80, 138–147. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, S.B.; Zhang, Q.Z. A New Adaptive H-Infinity Filtering Algorithm for the GPS/INS Integrated Navigation. Sensors 2016, 16, 2127. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G. Quality control in integrated navigation systems. In Proceedings of the IEEE Symposium on Position Location and Navigation. A Decade of Excellence in the Navigation Sciences, Las Vegas, NV, USA, 20–23 March 1990; pp. 158–165. [Google Scholar]
- Jiang, C.; Zhang, S.-b.; Zhang, Q.-z. A Novel Robust Interval Kalman Filter Algorithm for GPS/INS Integrated Navigation. J. Sens. 2016, 2016, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Jiang, C.; Zhang, S.B. A Novel Adaptively-Robust Strategy Based on the Mahalanobis Distance for GPS/INS Integrated Navigation Systems. Sensors 2018, 18, 695. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.; Hu, G.; Zhu, X.; Zhong, Y. A Robust Cubature Kalman Filter with Abnormal Observations Identification Using the Mahalanobis Distance Criterion for Vehicular INS/GNSS Integration. Sensors 2019, 19, 5149. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Li, Z.; Liu, Z.; Wang, C.; Sun, Y.; Shao, K. Improved robust and adaptive filter based on non-holonomic constraints for RTK/INS integrated navigation. Meas. Sci. Technol. 2021, 32, 105110. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, T. An Adaptive Kalman Filter Based on Sage Windowing Weights and Variance Components. J. Navig. 2003, 56, 231–240. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Wang, J.; Stewart, M.P.; Tsakiri, M. Adaptive Kalman Filtering for Integration of GPS with GLONASS and INS; Springer: Berlin/Heidelberg, Germany, 2000; Volume 121, pp. 325–330. [Google Scholar]
- Gandhi, M.A.; Mili, L. Robust Kalman Filter Based on a Generalized Maximum-Likelihood-Type Estimator. IEEE Trans. Signal Process. 2010, 58, 2509–2520. [Google Scholar] [CrossRef]
- Duan, Z.; Zhang, J.; Zhang, C.; Mosca, E. Robust H2 and H∞ filtering for uncertain linear systems. Automatica 2006, 42, 1919–1926. [Google Scholar] [CrossRef]
- Zhang, L.; Viktorovich, P.A.; Selezneva, M.S.; Neusypin, K.A. Adaptive Estimation Algorithm for Correcting Low-Cost MEMS-SINS Errors of Unmanned Vehicles under the Conditions of Abnormal Measurements. Sensors 2021, 21, 623. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, J. An Improved Adaptive Filtering Algorithm with Applications in Integrated Navigation. In Proceedings of the 2012 Third International Conference on Digital Manufacturing & Automation, Guilin, China, 31 July–2 August 2012; pp. 182–185. [Google Scholar]
- Shi, E. An Improved Real-Time Adaptive Kalman Filter for Low-Cost Integrated GPS/INS Navigation. In Proceedings of the 2012 International Conference on Measurement, Information and Control, Harbin, China, 18–20 May 2012; Volume 2, pp. 1093–1098. [Google Scholar]
- Yang, Y.; He, H.B.; Xu, G. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Yang, Y.; Cui, X. Adaptively robust filter with multi adaptive factors. Surv. Rev. 2013, 40, 260–270. [Google Scholar] [CrossRef]
- Yang, Y. Adaptively Robust Kalman Filters with Applications in Navigation. In Sciences of Geodesy-I; Springer: Berlin/Heidelberg, Germany, 2010; pp. 49–82. [Google Scholar]
- Yang, Y.; Xu, T.; Xu, J. Principles and Comparisons of Various Adaptively Robust Filters with Applications in Geodetic Positioning. In Proceedings of the 1st International Workshop on the Quality of Geodetic Observation and Monitoring Systems (QuGOMS’11), Munich, Germany, 13–15 April 2011; pp. 101–105. [Google Scholar]
- Jung, S.; Hwang, S.; Shin, H.; Shim, D.H. Perception, Guidance, and Navigation for Indoor Autonomous Drone Racing Using Deep Learning. IEEE Robot. Autom. Lett. 2018, 3, 2539–2544. [Google Scholar] [CrossRef]
- Rostami, M.; Kolouri, S.; Eaton, E.; Kim, K. SAR Image Classification Using Few-Shot Cross-Domain Transfer Learning. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 16–17 June 2019; pp. 907–915. [Google Scholar]
- Abdallah, A.; Kassas, Z. Deep Learning-Aided Spatial Discrimination for Multipath Mitigation; IEEE: Piscataway, NJ, USA, 2020; pp. 1324–1335. [Google Scholar]
- Fayjie, A.; Hossain, S.; Doukhi, O.; Lee, D. Driverless Car: Autonomous Driving Using Deep Reinforcement Learning in Urban Environment. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 28 June–1 July 2018; pp. 896–901. [Google Scholar]
- Yan, P.; Jiang, J.; Tang, Y.; Zhang, F.; Xie, D.; Wu, J.; Liu, J.; Liu, J. Dynamic Adaptive Low Power Adjustment Scheme for Single-Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation in the Complex Urban Environment. Remote. Sens. 2021, 13, 3236. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Q.; Niu, X. Kinematic Measurement of the Railway Track Centerline Position by GNSS/INS/Odometer Integration. IEEE Access 2019, 7, 157241–157253. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation (Kalman, H∞, and Nonlinear Approaches)||Optimal Smoothing; John Wiley and Sons: Hoboken, NJ, USA, 2006; pp. 263–296. [Google Scholar]
- Zhu, Q.J.; Yan, G.M.; Yang, P.X.; Qin, Y.Y. A Rapid Computation Method for Kalman Filtering in Vehicular SINS/GPS Integrated System. Appl. Mech. Mater. 2012, 182–183, 541–545. [Google Scholar] [CrossRef]
- Emami, M.; Taban, M. A Low Complexity Integrated Navigation System for Underwater Vehicles. J. Navig. 2018, 71, 1–17. [Google Scholar] [CrossRef]
- Li, Q.; Ban, Y.; Niu, X.; Zhang, Q.; Gong, L.; Liu, J. Efficiency Improvement of Kalman Filter for GNSS/INS through One-Step Prediction of P Matrix. Math. Probl. Eng. 2015, 2015, 1–13. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | SPAN CPT6 | ||
|---|---|---|---|
| Gyro | Bias (deg/h) | 10 | 0.027 |
| ARW (deg/sqrt(h)) | 0.27 | 0.0667 | |
| Accelerometer | Bias (mGal) | 1800 | 50 |
| VRW (m/s/sqrt(h)) | 0.042 | 0.03 |
| CRAKF | Sage Filter | Extended Kalman Filter | IRAKF | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pos (m) | Vel (m/s) | Heading (deg) | Pos (m) | Vel (m/s) | Heading (deg) | Pos (m) | Vel (m/s) | Heading (deg) | Pos (m) | Vel (m/s) | Heading (deg) | |
| RMS | 0.26 | 0.038 | 0.44 | 0.28 | 0.039 | 0.46 | 1.3 | 0.22 | 0.77 | 0.25 | 0.035 | 0.43 |
| MAX | 1.67 | 0.18 | 4.06 | 1.7 | 0.18 | 4.1 | 17.1 | 3.4 | 7.8 | 1.65 | 0.14 | 4.06 |
| CRAKF | Sage Filter | Extended KF | IRAKF | Improvement (%) | |||
|---|---|---|---|---|---|---|---|
| horizontal position (m) | 0.15 | 0.14 | 3.8 | 0.12 | 20 | 14.3 | 96.8 |
| CRAKF | Sage Filter | Extended KF | IRAKF | Improvement (%) | |||
|---|---|---|---|---|---|---|---|
| horizontal position (m) | 0.16 | 0.165 | 2.1 | 0.14 | 12.5 | 15.2 | 93.3 |
| Position (m) | Velocity (m/s) | Attitude (deg) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| North | East | Down | North | East | Down | Roll | Pitch | Yaw | |
| CRAKF | 0.21 | 0.16 | 0.74 | 0.035 | 0.034 | 0.045 | 0.53 | 0.214 | 0.432 |
| Sage filter | 0.2 | 0.19 | 0.68 | 0.036 | 0.036 | 0.044 | 0.55 | 0.22 | 0.45 |
| Extended Kalman filter | 1.11 | 0.66 | 1.02 | 0.19 | 0.2 | 0.23 | 0.65 | 0.60 | 0.774 |
| IRAKF | 0.18 | 0.14 | 0.56 | 0.033 | 0.032 | 0.043 | 0.51 | 0.2 | 0.43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, P.; Jiang, J.; Zhang, F.; Xie, D.; Wu, J.; Zhang, C.; Tang, Y.; Liu, J. An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module. Remote Sens. 2021, 13, 4317. https://doi.org/10.3390/rs13214317
Yan P, Jiang J, Zhang F, Xie D, Wu J, Zhang C, Tang Y, Liu J. An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module. Remote Sensing. 2021; 13(21):4317. https://doi.org/10.3390/rs13214317
Chicago/Turabian StyleYan, Peihui, Jinguang Jiang, Fangning Zhang, Dongpeng Xie, Jiaji Wu, Chao Zhang, Yanan Tang, and Jingnan Liu. 2021. "An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module" Remote Sensing 13, no. 21: 4317. https://doi.org/10.3390/rs13214317
APA StyleYan, P., Jiang, J., Zhang, F., Xie, D., Wu, J., Zhang, C., Tang, Y., & Liu, J. (2021). An Improved Adaptive Kalman Filter for a Single Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation Module. Remote Sensing, 13(21), 4317. https://doi.org/10.3390/rs13214317