1. Introduction
Wetlands, natural or man-made, permanent or temporary, provide essential ecosystem services all over the Earth. They contribute to improving water quality, protecting shorelines, recharging groundwater, reducing flood and drought severity and providing unique habitats for many plants and animals [
1]. The role of wetlands in maintaining the biodiversity of aquatic ecosystems has motivated several international environmental protection initiatives, such as the Ramsar Convention [
2]. Despite their recognized importance, wetlands are among the most threatened ecosystems in the world. Indeed, more than 50% of the world’s wetlands have been converted or lost in the last century [
3]. They were either completely converted to other land uses or their ecological functionality was gradually altered by changing the hydrologic regime and introducing farming and agriculture [
4]. In the Mediterranean region, approximately 80–90% of natural wetlands have disappeared and 23% of the remaining wetlands have been artificially managed as rice fields, salt pans or water storage for irrigation purposes [
5]. Many studies have speculated about the ecological value of artificial wetlands as surrogate habitats for many species of aquatic invertebrates and birds [
6,
7,
8,
9,
10]. Rice fields, currently accounting for 15% of the world’s wetlands [
11], are one of the essential artificial habitats for the conservation of many aquatic species [
12]. Aquatic habitat availability for many species depends on several factors, including the duration and extent of flooding [
13], the water depth [
14], the sediment content [
15], the water quality [
3,
16,
17,
18] and the presence of aquatic and terrestrial vegetation [
18,
19]. Wetland management practices that shorten the duration of flooding periods may significantly reduce the ecological value of rice fields and cause the decline of many aquatic species [
11,
20]. The conservation of biodiversity in artificial wetlands and rice fields requires proper duration, frequency and seasonality of flooding. Many studies have shown how the winter flooding of rice fields contributes to increase habitat availability for birds [
12,
21,
22].
Satellite-based remote sensing (RS) provides cost-effective products to monitor the extent and duration of flooding in natural and man-made wetlands [
23]. Indeed, the Ramsar Convention encouraged the development and implementation of remote sensing applications for wetland monitoring [
24]. A significant advantage of satellite remote sensing, compared to conventional mapping, is the possibility of monitoring wide areas with high spatial, temporal and spectral resolutions. Moreover, some satellite archives are distributed at no cost for the users and provide time series longer than 30 years.
Multispectral sensors acquire data with high spectral resolution in the visible and infrared range and this makes them suitable for identifying different types of land cover, such as water, vegetation and bare soil (see, e.g., [
24,
25,
26]). Their main drawback is the inability to observe the Earth’s surface in the presence of clouds; consequently, long periods without observation may occur in areas with frequent precipitation. Among freely distributed multispectral datasets, Landsat-8, provided by the joint efforts of the United States Geological Survey (USGS) and the National Aeronautics and Space Administration (NASA), and Sentinel-2, provided by the European Space Agency (ESA), are frequently employed. These datasets have high spatial resolution (starting from 10 m for some bands) and a short revisit time (up to 5 days in recent years) even if the effective time interval between two subsequent observations of the scene can be longer in the presence of clouds. Nevertheless, the joint use of the two datasets can decrease the effective revisit time. Mandanici and Bitelli [
27] showed that corresponding bands in Landsat-8 and Sentinel-2 are positively correlated. However, the impact of radiometric differences, between the images acquired by the two sensors, needs careful evaluation for each specific application. The combination of images provided by different sensors can be performed by combining the data, the indexes or the information retrieved separately from each set [
28,
29].
The practical exploitation of the high number of archive multi-temporal images depends on the possibility of automatic classification. Many methods are available in the literature, mostly exploiting the peculiar reflectivity spectrum of wetlands. Amani et al. [
30] developed an extensive analysis of Sentinel-2, Landsat-8 and other multispectral datasets, investigating the capability to distinguish soil, water and vegetation by exploiting their spectral signatures. They found that the red, red-edge (RE) and near-infrared (NIR) bands are the most appropriate for wetland classification, while the SWIR bands exhibited intermediate separability and were helpful in specific cases (e.g., for discriminating the shallow water class). In particular, the reflectance of the SWIR band decreases as the moisture content increases, allowing dry soils to be distinguished from wet soils. However, moist soils and soils covered by shallow water provide similar reflectance in the SWIR band and cannot be separated. The different spectral responses have been frequently exploited to define multispectral indices. For example, Davranche et al. [
31] combined various multispectral indices in a classification tree, in order to monitor the Camargue wetland by multispectral SPOT-5 images (10 m spatial resolution). Pernollet et al. [
12] used the Modified Normalized Difference Water Index (MNDWI), extracted from the Landsat dataset, to map open water areas in five study regions. Li et al. [
32] used multispectral indices with ALI and Landsat data (30 m spatial resolution), while Li et al. [
33] used MODIS data (250 m spatial resolution).
Supervised classification algorithms were also used by many authors (e.g., [
24,
25]). Forkuor et al. [
34] used random forest and support vector machine algorithms and showed the potentialities of multi-sensor approaches. Dronova et al. [
35] performed change detection using object-based analysis for the mapping of four wetland land cover classes (water, vegetation, sand and mud flood), by using multispectral data from the Beijing-1 microsatellite sensor, with a resolution of 30–40 m. However, the use of supervised classification methods is limited in practical application because they need a large amount of training data. A comprehensive review of remote sensing data and methods for wetland classification was provided by Mahdavi et al. [
36].
Despite many advances in RS technology, wetland land cover classification is still an unresolved problem due to the difficulties linked to their extreme heterogeneity and frequent time changes. Ozesmi and Bauer [
23] pointed out that, in the case of wetlands, satellite image classification is challenging due to fluctuating water levels, which change the spectral reflectance of vegetation, and the presence of floating masses of periphyton. Indeed, the classification of flooded areas is particularly challenging, especially when the water depth is shallow, water turbidity is high and there is emergent or submerged vegetation and a continuous succession of small emerged and submerged patches.
The main objective of this work is to develop a simple method for monitoring the wetland land cover and the temporal succession of flooding and drying. We jointly used two freely distributed datasets: Landsat-8 and Sentinel-2. In order to reduce the complexity of the processing and improve the accessibility of the information outside the circle of remote sensing experts, we chose to merge the information separately extracted from each homogeneous set of data. We developed a simple method, based on three multispectral indices, to classify open water, shallow turbid water, patches of submerged and emerged areas, vegetation and bare soil. An automatic, rule-based classification method was used to discriminate four land cover classes and monitor the evolution and duration of flooding. A specific procedure was implemented to combine the land cover maps obtained autonomously from the two datasets so as to produce winter flooding duration maps.
We calibrated and validated the classification method in the Albufera wetland, located in the western area of the Mediterranean Sea, in the Iberian Peninsula. Previous research on the satellite remote sensing of Albufera wetland had objectives other than the one presented here, such as water quality estimation [
37,
38,
39,
40]. The Albufera wetland can be used as an example of a natural wetland that was transformed into an artificially managed one over the years. It has an extensive area of approximately 220 km
2, which is now mostly dedicated to rice cultivation [
40]. Despite its transformation, Albufera was designated on 5 December 1989 as a “Wetland of International Importance” under the Ramsar Convention, because, during the winter flooding, it offers habitats for migratory birds. This work is part of a larger research project that aims to understand the relation between the dynamics of the flooding, its duration, extension and spatial continuity and the availability of habitats in the Albufera wetland.
2. Study Case
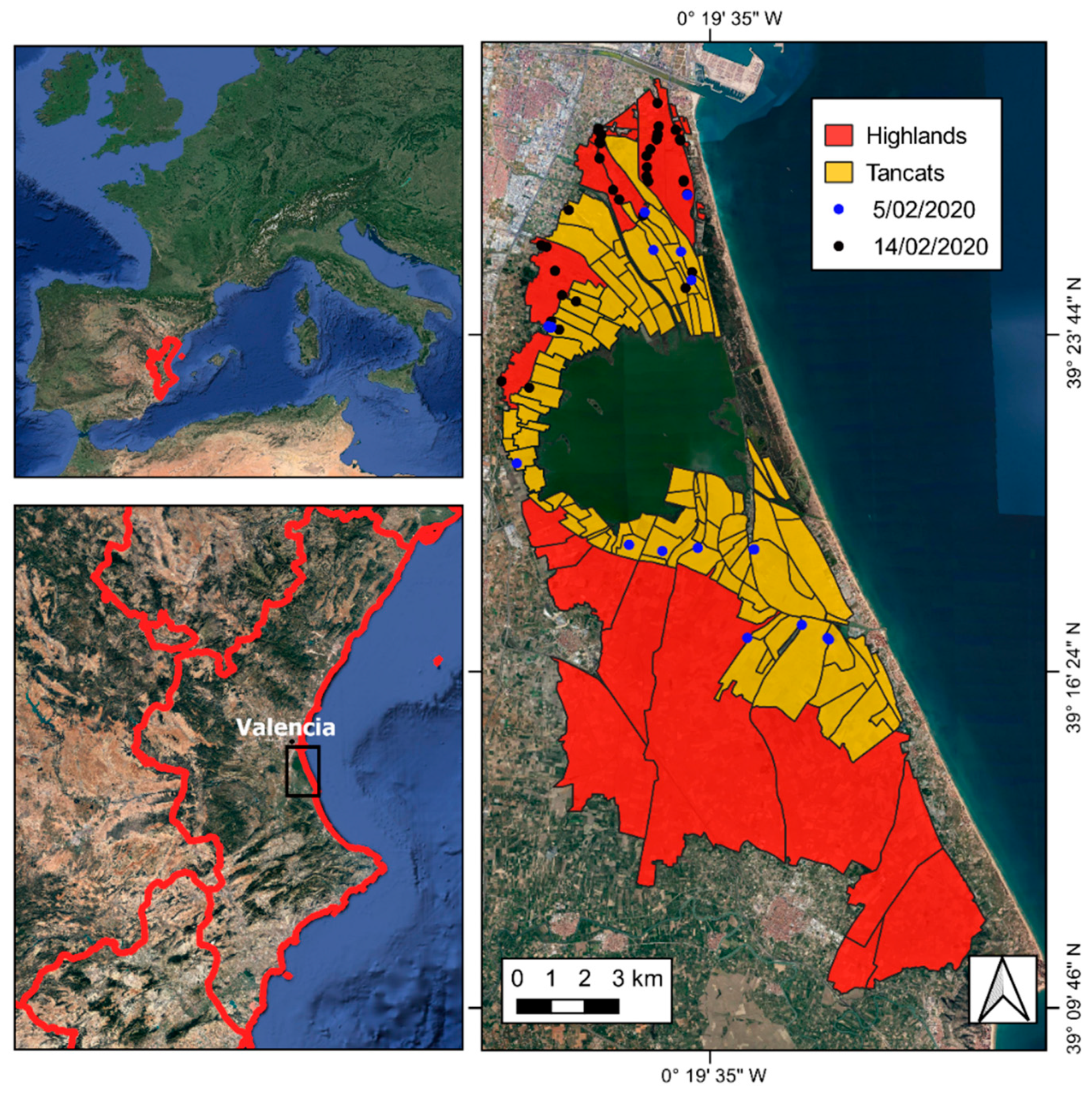
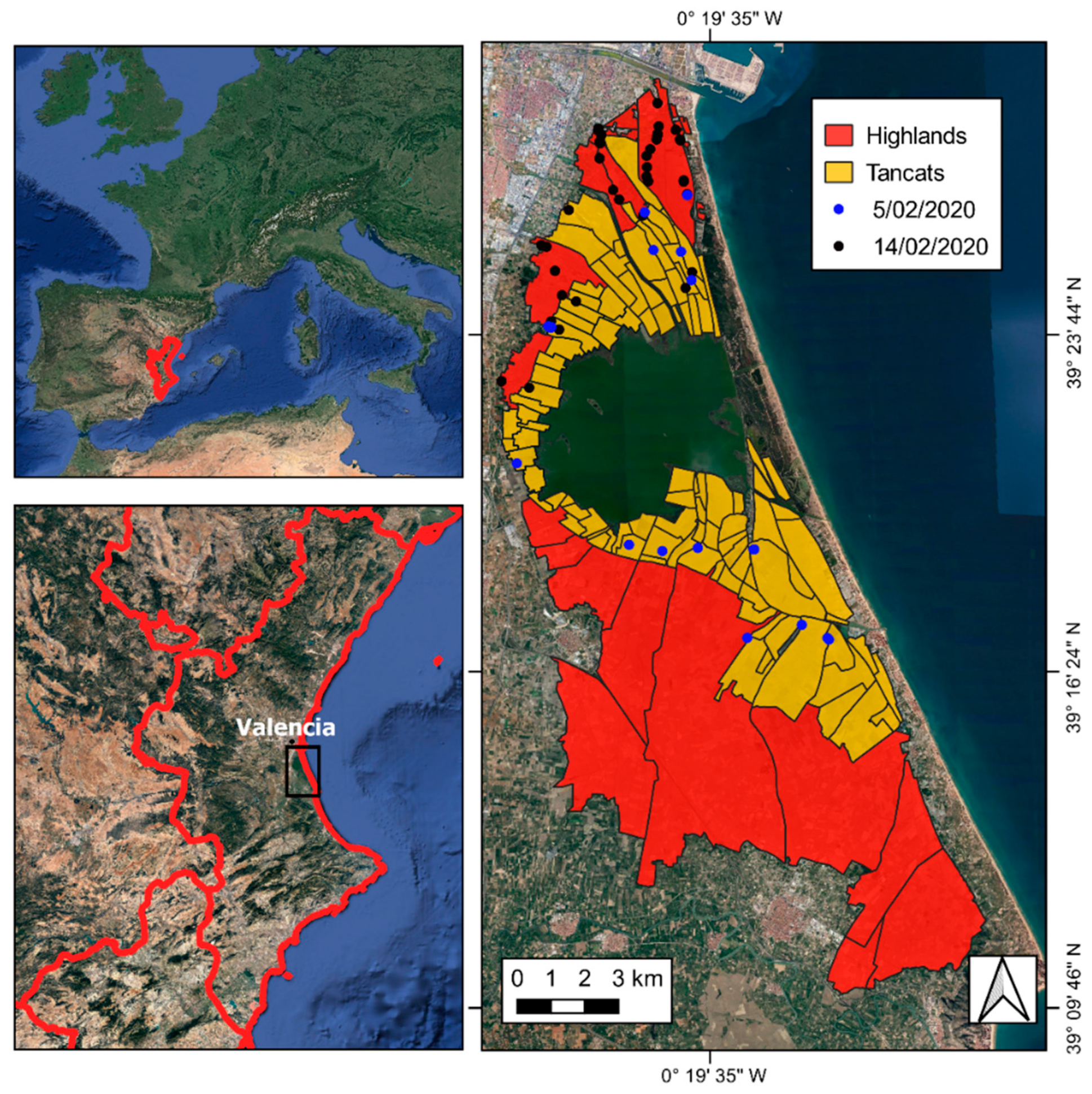
The Albufera is a Mediterranean coastal wetland located 10 km south of the city of Valencia in Spain (
Figure 1). This wetland covers an area of 210 km
2; it includes the Albufera lake, with a surface of approximately 24 km
2, and rice fields with an area of around 150 km
2.
The Albufera wetland was declared Natural Park in 1986 and was included in the Ramsar Convention on “Wetlands of International Importance” in 1989. It is also part of the Natura 2000 network as a Special Protection Area for Birds (SPA) under the Birds Directive 2009/147/EC (site code ES0000471), and a Site of Community Importance (SCI) under Habitats Directive 92/43/EEC (site code ES0000023). The SCI site hosts, in total, 115 species, referred to in Article 4 of the Birds Directive and listed in Annex II of the Habitats Directive. Among them, 64 winter and 35 reproduce in the wetland. Among protected fish species, there are the Spanish Cyprinodont, classified as endangered, and the Valencia Toothcarp, classified as critically endangered. The endangered plants Marsilea and Marsilea Quadrifolia are also present.
From a geological point of view, the site is located in a sedimentary basin of Holocene origin that includes the coastal plain of the province of Valencia. The climate is Mediterranean, with mild winters and warm to hot summers. The average annual precipitation is less than 460 mm, with a maximum in October and a minimum in July.
The Albufera lake is the largest freshwater body on the Iberian Peninsula; it is fed by irrigation channels, storm water streams and urban and industrial wastewater treatment plants. The Albufera lake is connected to the Mediterranean Sea through two natural channels and one artificial channel called “golas”, where sluice gates control the freshwater outflow towards the sea and regulate the water level of the lake. The wetland flooding is managed in two different ways (see
Figure 1). The rice fields close to the lake correspond to the traditional area previously occupied by the lake. Earth dikes and pumping stations were introduced to regulate the water level in these lowlands, which are locally called “
Tancats”. The highlands, further away from the lake and at higher elevation, are flooded from the Turia and Xuquer Rivers. In addition to these water sources, since 1990, the northern part of the wetland has been irrigated with the outlet of the wastewater treatment plant of Pinedo, located at the northern boundary of the natural park.
Water levels and the extension of the flooding area are regulated by different irrigation communities according to the needs of rice cultivation. There are two flooding periods, in winter and in summer. The summer flooding usually starts in May and ends in mid-September, when the farmers dry up the fields for harvesting. The duration of summer flooding is determined by the rice cultivation technique. Winter flooding starts around the end of October and lasts until the beginning of March. The purposes of winter flooding are to provide habitats for water-related animals and to support recreational activities such as hunting [
40]. The winter flooding is economically supported by the European Agricultural Fund for Rural Development (EAFRD). In winter periods, the
Tancats are completely flooded with the water level at the top of the dikes and the rice fields are hydraulically connected to each other. Parts of the highlands are also flooded but the water depth may be of the order of a few centimeters only. Given the unpredictability of the duration of winter flooding and its importance for maintaining biodiversity, in this work, we focused specifically on the monitoring of the winter period.
4. Methods
In this work, we jointly used the information acquired by L8 and S2 data in order to reduce the revisit time and consequently improve the temporal continuity of monitoring. The multidisciplinary nature of the project required simple, automatic and robust processing, easily employable also for non-expert users. Given the above-defined goal and constraints, we used a method based on the integration of information retrieved separately from L8 and S2 processing. This choice avoided the implementation of cross-calibration algorithms that could be challenging in the technical applications. The results and the compatibility of the information retrieved by the heterogeneous data were verified by checking the coherence of the land classification obtained by the two datasets (details are reported in
Section 4.3).
4.1. Rule-Based Classification of Land Cover Classes
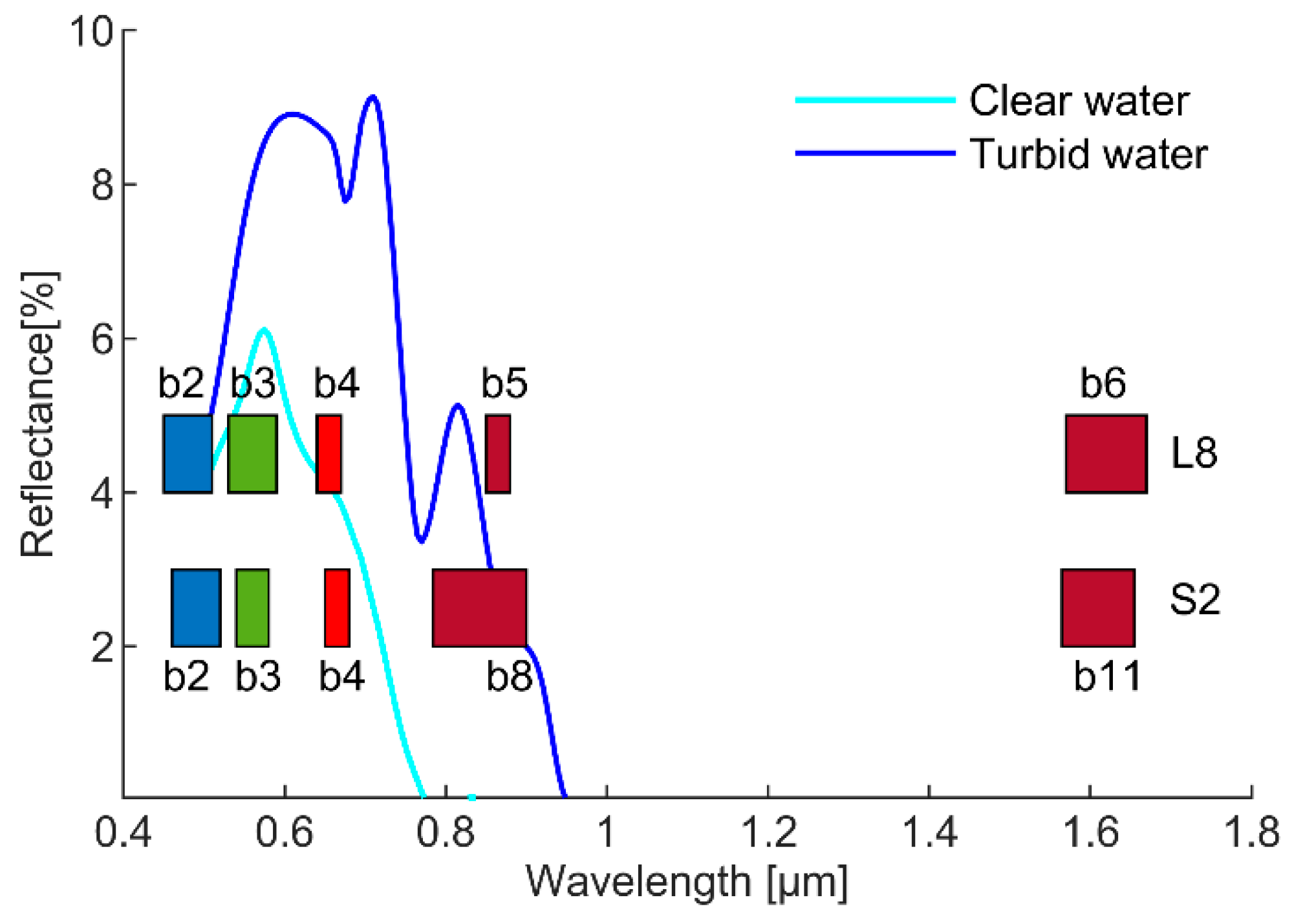
Different types of surfaces, such as water, vegetation, bare soil and urbanized areas, have different reflectivity spectra [
43]. The spectrum of water depends on its chemical and physical characteristics. Indeed, the clear water reflectance spectrum peaks in the green wavelength band (0.50–0.56 µm) and decreases against increasing wavelengths, reaching a reflectance close to zero in the near-infrared (NIR) region (0.75–1.4 µm). The turbid water reflectance spectrum exhibits higher values than clear water in the near-infrared region and approaches zero at longer wavelengths [
44]. This is due to the concentration of solutes, sediments and organic matter, whose presence reinforces the reflection in the near-infrared band. The above-described patterns are displayed in
Figure 2. Typically, the water of wetlands, lakes and rivers contains solid particles and appears not clear. In the case of shallow water, the turbidity of the surface layer can be particularly high. Furthermore, in the case of shallow transparent water, the spectral signature can be influenced by the reflectance of the bed.
The differences in spectral signatures are typically exploited for the automatic classification of land cover, defining appropriate multispectral indices. For instance, the widely used Normalized Difference Water Index (NDWI) [
45] is defined as:
where
ρgreen and
ρNIR are the reflectivity in the green and NIR bands. It can be argued from the spectra presented in
Figure 2 that areas covered with clean water will be characterized by positive values of NDWI. On the contrary, it is expected that the surfaces covered by turbid waters will manifest almost null values of NDWI. In contrast, both clean and turbid water will be characterized by positive values of MNDWI [
46], which uses the short-wavelength infrared
ρSWIR_1 (SWIR) (1.4–3 µm) in place of the NIR reflectivity:
Along with water indices, the Normalized Difference Vegetation Index (NDVI) [
47] is used to identify vegetated areas. The NDVI is defined as a combination of the NIR and visible red (
) to bring out the significant difference in the vegetation spectrum in these bands:
Following previous literature studies [
48,
49], we used a threshold of 0.3 to discriminate the presence of vegetation in the observed area. In
Table 2, the bands used to compute the NDWI, MNDWI and NDVI indices are specified for both the L8 and S2 datasets.
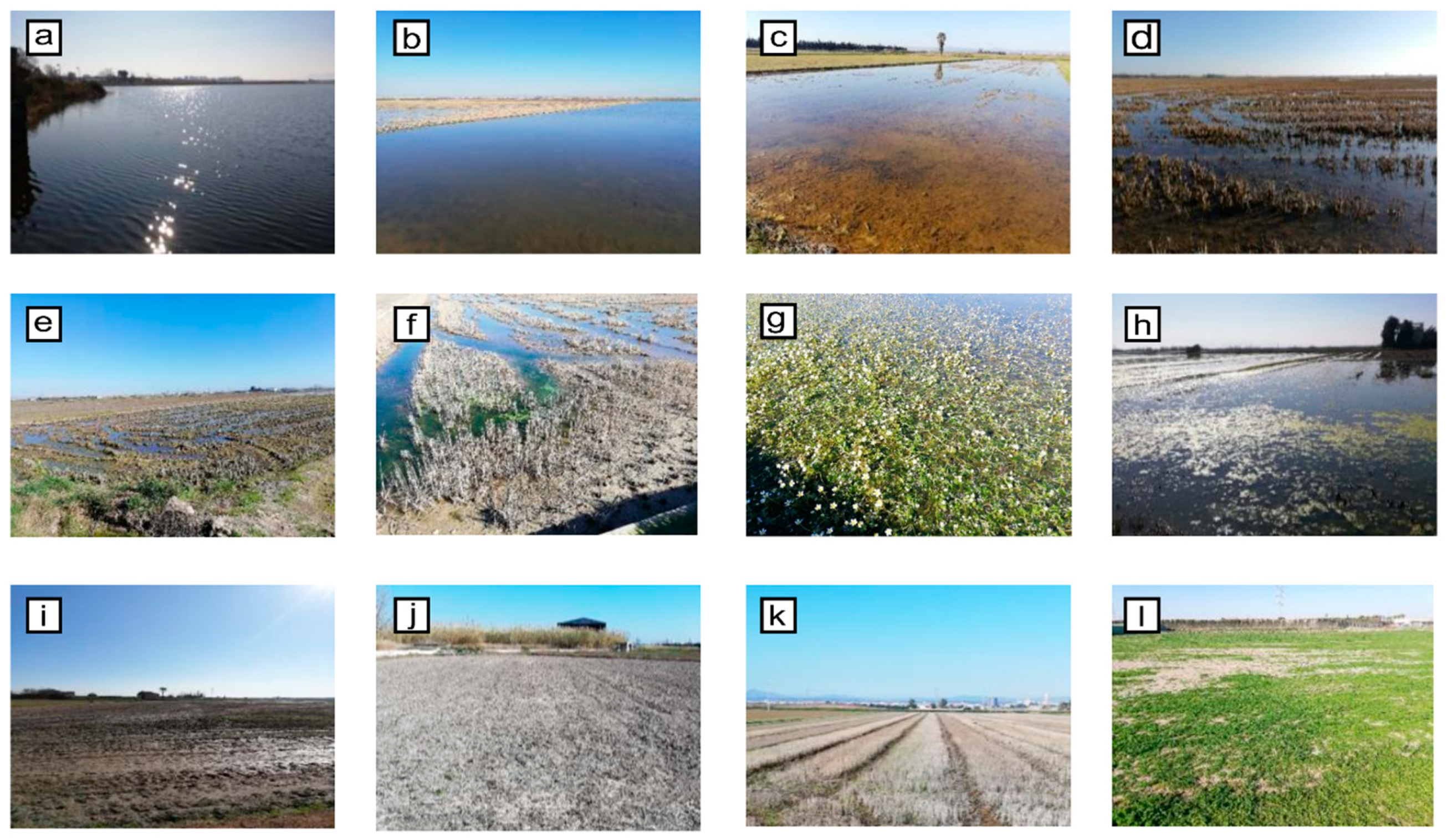
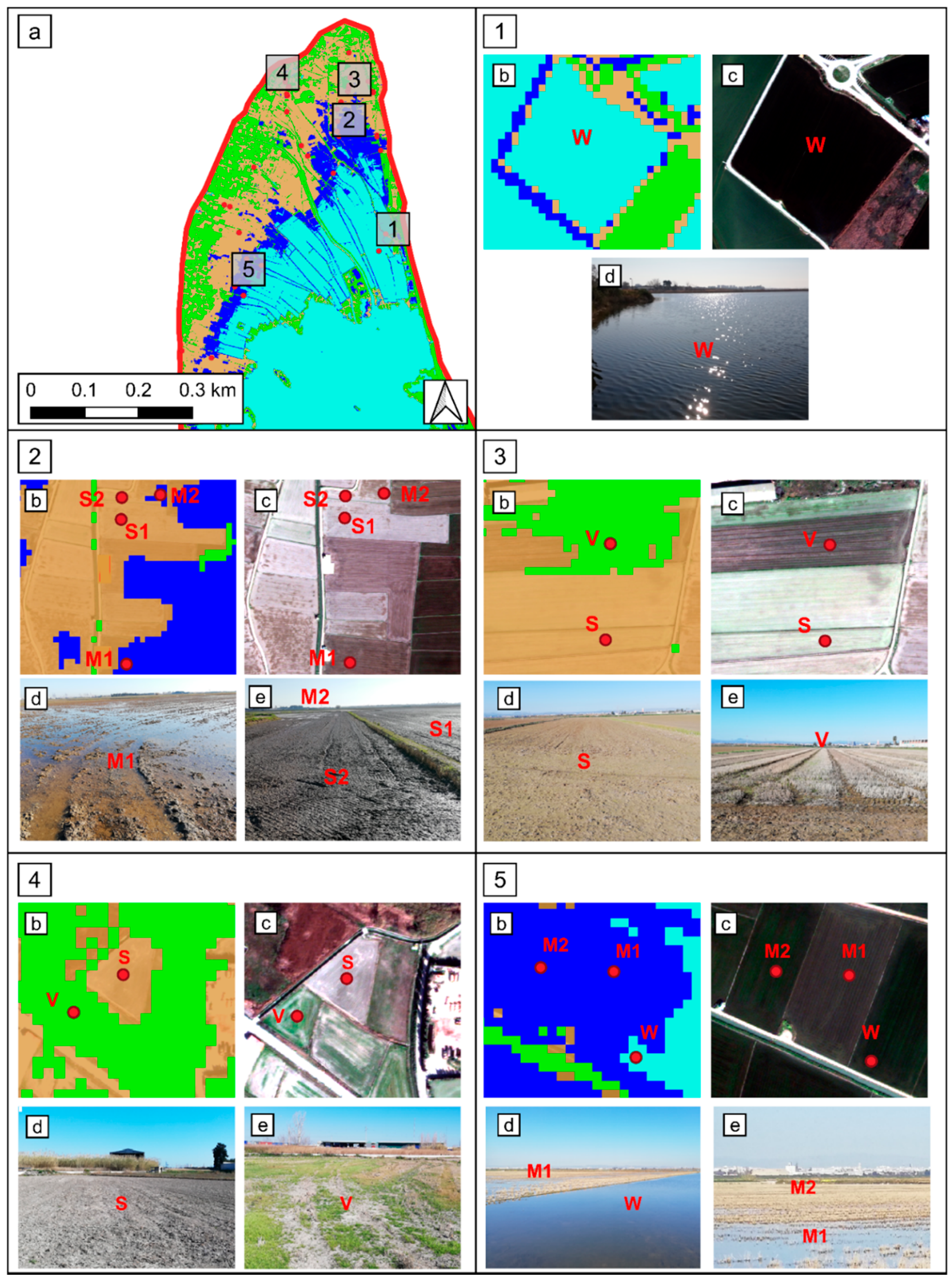
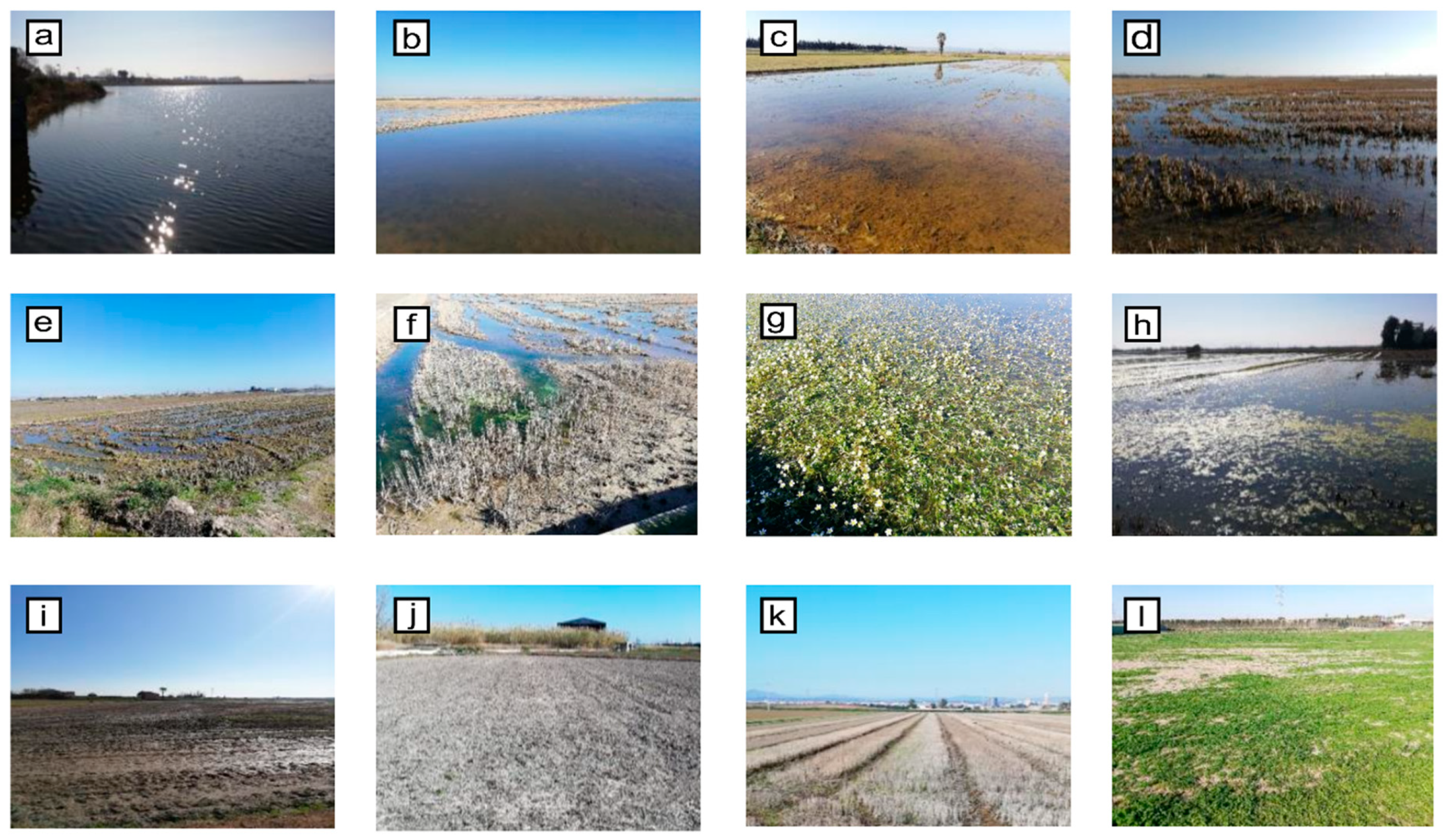
As illustrated in
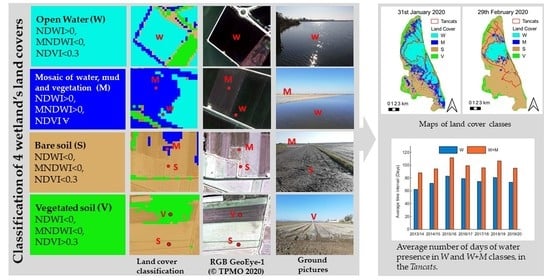
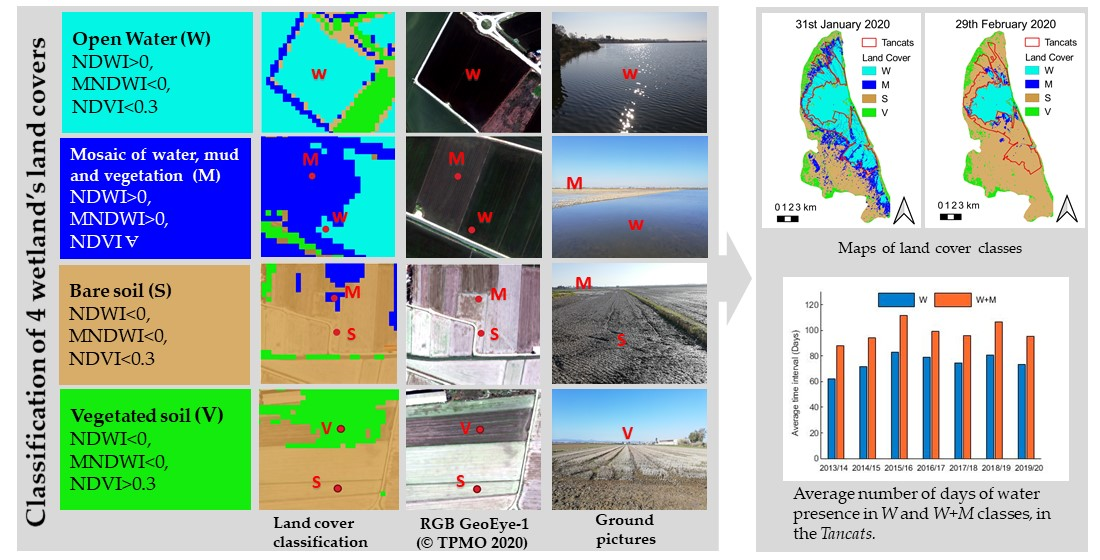
Figure 3, the Albufera wetland’s land cover, in the winter period, is extremely variegated. Considering the classification capacity of the multispectral indices, land cover types were grouped into four classes (see
Table 3). In the following, we describe these four classes and the rule-based classification method used to discriminate them.
The first class, labeled “Open water” (
W), represents the typical winter condition in the
Tancats that are flooded, with water depths ranging from around 0.5 to 1 m (see
Figure 3a,b). Note that in some
Tancats, dried rice plants could emerge from the shallow water, as shown in the background of
Figure 3b. The
W class refers to flooded areas with a smooth clear surface and significant depth (higher than approximately 20 cm). In these areas, the sediment content of the water layer close to the surface is low, as shown in the pictures in
Figure 3. As the multispectral response is determined by this surface layer, the NDWI results in a positive value. Consequently, the
W class can be identified in the satellite images because we expect that the corresponding pixels will exhibit positive values of the water indices (NDWI and MNDWI) and below-threshold values of the vegetation index (NDVI).
In the marginal areas of the wetland, patches of shallow water, mud and vegetation may coexist for transitional periods. As an example,
Figure 3e,f show ponds of shallow water surrounded by mud, grass and dead vegetation.
Figure 3c shows an area flooded with shallow and turbid water;
Figure 3d shows an area flooded with a thin layer of water, from which dry rice plants emerge;
Figure 3g,h show flooded areas partially covered with vegetation. All these situations are grouped into the second class, labeled “Mosaic of water, mud and vegetation” (
M). These areas can be identified in the satellite images because we expect that the corresponding pixels will exhibit low values of the NDWI, high values of the MNDWI and any value (the ∀ sign) assumed by the NDVI. The third class, labeled “Bare soil” (
S), represents wet and dry bare soils (see
Figure 3i,j). These areas can be identified in the satellite images because we expect that the corresponding pixels will exhibit low values of the water and vegetation indices.
The fourth class, labeled “Vegetated soil” (
V), represents soils partially or entirely covered by vegetation, in wet and dry conditions, as presented in
Figure 3k,l. These areas can be identified in the satellite images because we expect that the corresponding pixels will exhibit negative values of the water indices and above-threshold values of the vegetation index.
Based on these considerations, we developed a rule-based classification that allows to distinguish the four classes by exploiting the combination of the responses of the three multispectral indices. The adopted rule-based classification method is summarized in
Table 3. The few pixels that do not meet the adopted conditions were considered outliers and labeled as non-classified.
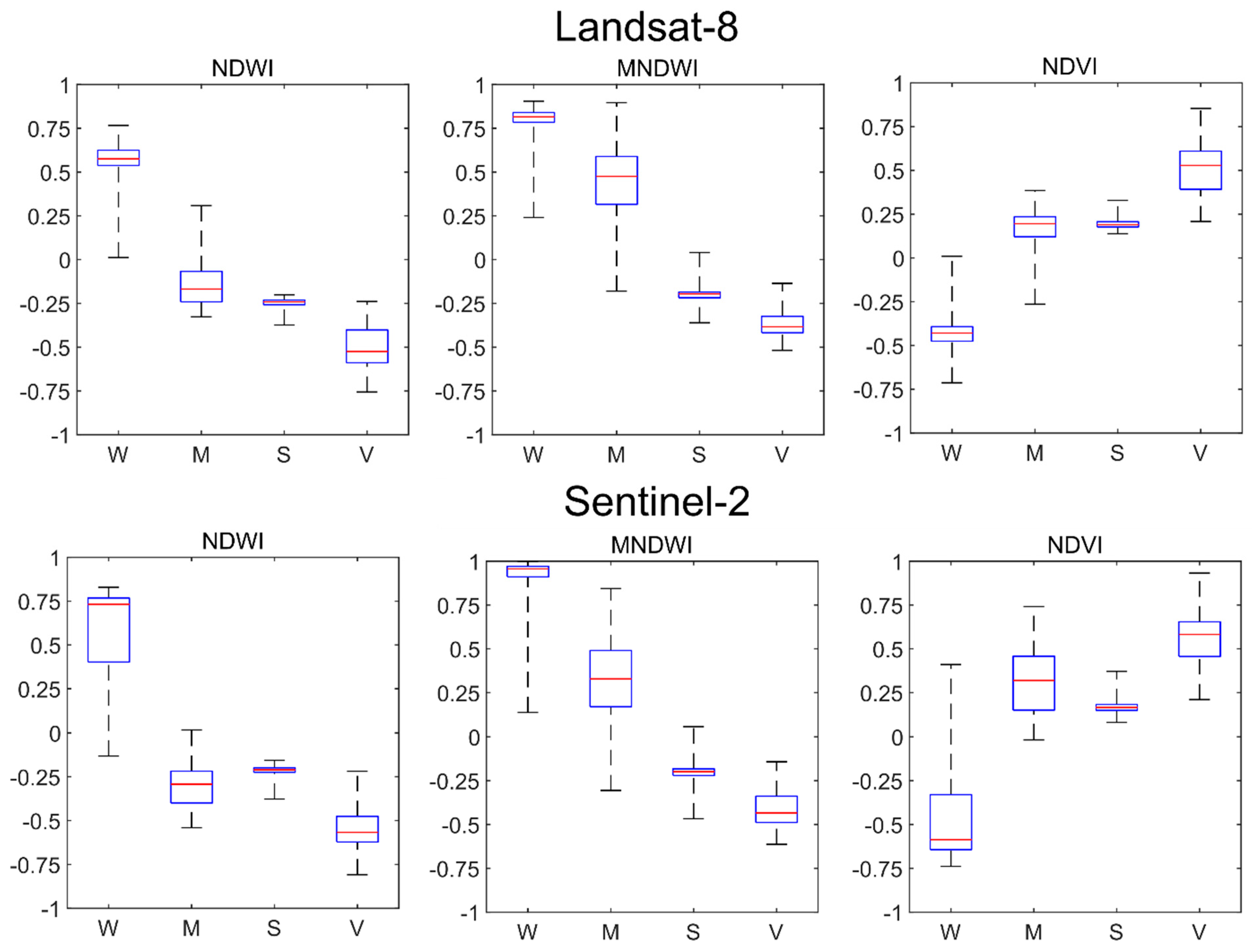
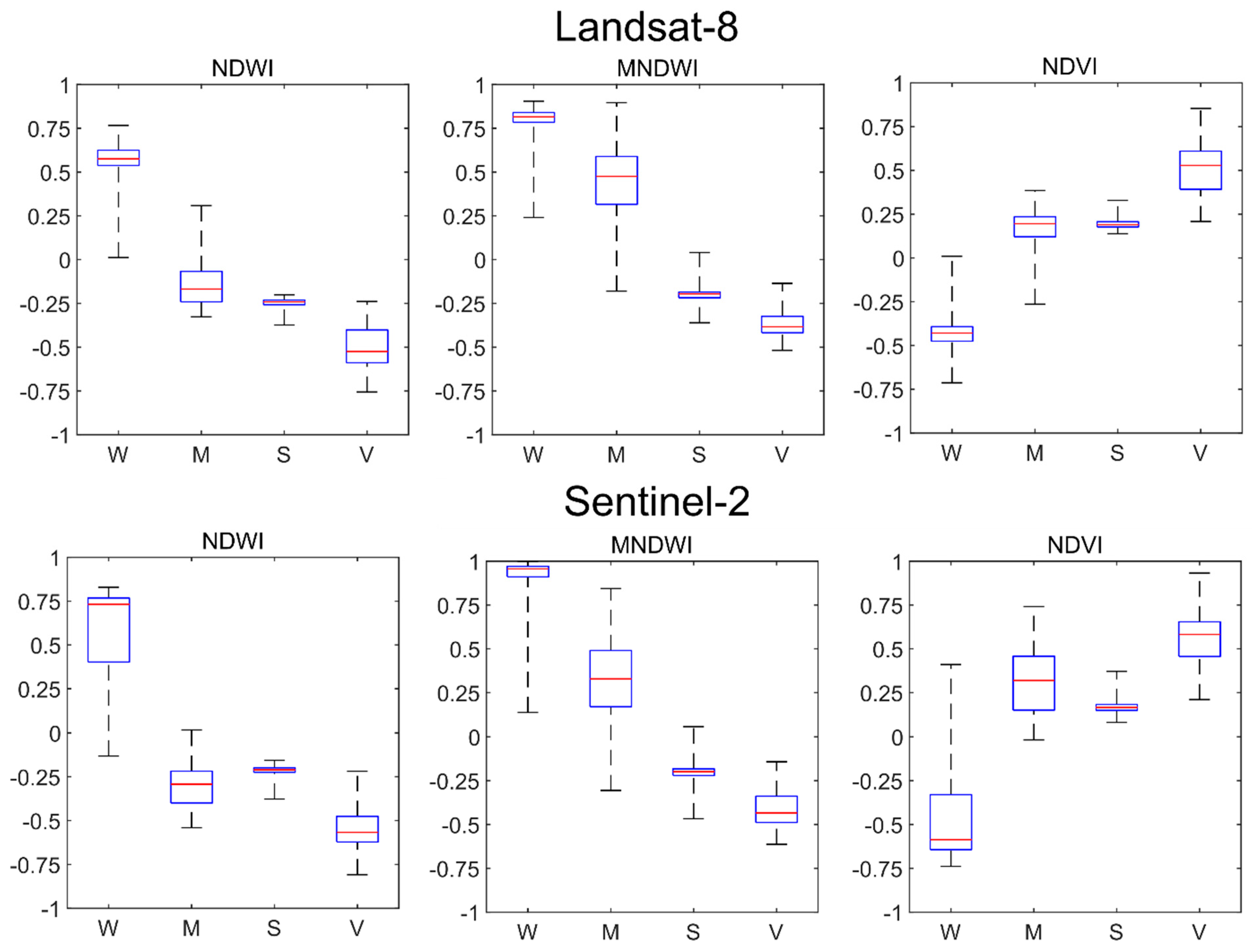
The actual possibility of identifying and distinguishing the four land cover classes was verified by calculating the values of the three multispectral indices for surfaces with known characteristics. These surfaces were mapped by the combined use of VHR images taken on the 14 of February 2020 and geo-located pictures. The detailed procedure for the generation of this ground truth is described in
Section 4.2. The results displayed in
Figure 4 show that for S2 data, pixels with positive NDWI values can be exclusively associated with the
W class. For L8 data, pixels with positive NDWI values can be mostly associated with the
W class, with a limited superposition with the
M class. Pixels with positive MNDWI values can be only associated with the
W and
M classes. Pixels with negative MNDWI values can be associated with the
V and
S classes. Despite small regions of superposition, the MNDWI seems to be able to discriminate the four classes. Pixels with values of NDVI greater than 0.3 represent areas with a significant presence of vegetation and can be mostly associated with the
V class. In the case of NDVI, the separability of classes is limited. In particular, the
S and
M classes are hardly separable with the exclusive use of the NDVI.
In synthesis, we can deduce that, although there is limited overlapping of the values of the indices if applied individually, the joint use of the three indices allows to separate the four classes fairly well.
4.2. Validation Approach
In order to validate the results of the land cover classification method, we compared the classification obtained from S2 and L8 images with the evidence extracted from the VHR images and the field data. Given the slow dynamic of the flooding, the scene can be assumed unchanged in a time interval of few days. Accordingly, we decided to accept the comparison between acquisitions with a maximum of three days of time-lapse. Such an approach led us to define 6 test cases. The acquisition dates of S2, L8, VHR images and field campaigns, of the 6 tests, are shown in
Table 4.
Given the different types and consistencies of the data available on the various cases listed in
Table 4, it was necessary to use three different validation approaches. In particular, (i) a pixel-based comparison was employable for case 1, where both VHR images and field pictures were available, (ii) an object-based comparison was possible for case 2 by using only field data as ground truth, and (iii) a more qualitative visual comparison was possible for the cases in which only VHR images were available (cases 3, 4, 5 and 6). The three validation approaches are described below.
In the pixel-based approach, we reported the point of geo-located pictures on the VHR images, and then we manually drew polygons, on the VHR images, to identify the extent of given classes. This operation is based on the visual analysis of the VHR image and therefore depends on the interpretation by the operator. However, the geo-located pictures allow us to identify the type of land use with good accuracy and, once the type is defined, it is quite clear to identify the extension of the assigned type on the VHR image. The manually generated ground truth, thus obtained, was compared on a pixel basis with the predicted land cover classification. The performances were estimated by the computation of the confusion matrix for a multi-class classification [
50]. The number of true positive (
TPi), false positive (
FPi), true negative (
TPi) and false negative (
FNi) results for the i-th class (
W,
S,
V or
M) were computed as follows:
where
Clk is the generic confusion matrix element, the index
l relates to the ground truth and the index
k refers to the predicted classification. Overall Accuracy, Precision (
Pi), Recall (
Ri) and F1 score (
F1i) were than computed by:
This approach could only be used in case 1, when we have contemporary acquisitions of VHR and ground pictures. The rule-based classification method was applied separately to the L8 image of 13 February 2020 and the S2 image of 15 February 2020, and the results were compared to the ground truth generated by the combination of ground pictures and VHR image.
The object-based approach consisted in the comparison between the predicted classification in a specific area and the land cover shown in the ground pictures for the same area. This approach was used for case 2. The acquisition points are concentrated inside the
Tancats (see
Figure 1), where water is almost always present in this period (
W and
M classes), and not enough points are available for the other two classes (
S and
V). For this reason, the comparison with the ground truth was made only for
W and
M classes. A two-class confusion matrix was computed and the classification metrics were then estimated by Equations (8)–(11).
The qualitative visual comparison is based on the simultaneous vision of the VHR image and the predicted land cover classification map. This approach is influenced to a greater extent by the interpretation made by the operator and therefore has a lower level of reliability than the other two approaches.
4.3. Consistency Check between the L8 and S2 Datasets
To evaluate the consistency between L8 and S2, the coherence of the land classification obtained by the two datasets was checked. With this aim, S2 and L8 cloud-free images, acquired on the same day, were selected. In the observation period, there are six contemporaneous S2 and L8 acquisitions. For this analysis, we resampled the L8 at the same resolution of the S2 images (10 m) using a bilinear interpolation algorithm. The performances were estimated by comparing each pixel of the so-called predicted condition (L8) with the so-called truth condition (S2). After computation of the confusion matrix, the Overall Accuracy, Precision (Pi), Recall (Ri) and F1 score (F1i) were estimated with Equations (8)–(11).
4.4. Winter Flooding Duration Maps
The winter flooding duration is key information to evaluate the habitat availability for water-related species. Given the varied management of the wetland, this duration varies from point to point and can be represented with a raster map showing, for each pixel, the number of days in which the corresponding surface was covered with water. For this purpose, we jointly used the L8 and S2 datasets in order to exploit the maximum possible frequency of observation. We first implemented a temporal gap-filling on the MNDWI and NDWI maps. The gap-filling was separately performed on the S2 and L8 datasets to obtain two separate daily series of index values. For each day, the closest S2 or L8 acquisition was identified and the corresponding synthetic map included in the merged series. When the acquisitions S2 and L8 are contemporary, the S2 map is preferred. We used the linear temporal gap-filling proposed by Inglada et al. [
51] to monitor vegetative processes and map land coverage through the NDVI on S2 data. This method has the advantage of being easily implemented and more robust than higher-order models. The temporal gap-filling is obtained by:
where
is the estimated value of the multispectral index (i.e., NDWI and MNDWI) at a specific date,
and
are the previous and the subsequent available values, and
and
are the left and right temporal gaps.
Once we had obtained the two daily series of MNDWI and NDWI maps, we applied the rule-based classification to identify the W and M classes. Finally, for each pixel, the number of days per year, in which the W or M class was present, was computed.
6. Discussion
The classification of wetland land cover from remotely sensed data is particularly complex due to the large spatial and temporal variability of water depth, water turbidity, floating or emerging vegetation and the growth and harvest of crops [
23]. Supervised algorithms have been implemented with good results for wetland land cover classification [
24,
25,
52]. In some cases, various land cover classes were identified, as in the present paper. For example, Dronova et al. [
35] mapped four land cover classes with an object-based supervised procedure. Nevertheless, the application of supervised methods seems to be limited due to the lack of local training datasets. Very high-resolution images, besides limited availability, do not provide reliable ground truth because the interpretation of the land cover types is uncertain, especially when plants are growing into the water or at the edges of submerged areas. To obtain reliable training samples, it is necessary to support the interpretation of high-resolution images with field surveys. Nevertheless, extensive field data collection is limited because it can be expensive and time-consuming. Unsupervised methods do not have these limitations and are generally characterized by higher transferability and therefore they can be implemented with less effort in different locations.
In this paper, we propose a straightforward and easily applicable, unsupervised, rule-based method for land cover classification in wetlands, exploiting the S2 and L8 datasets. The method is based on the combined use of three multispectral indices (MNDWI, NDWI and NDVI) and can be easily implemented by technicians and water managers with common GIS platforms. Another significant advantage of the proposed method is the possibility of distinguishing four land cover classes that are relevant for the evaluation of habitat availability for water-related animals and plants. The open water (
W class) is distinguished from very shallow water or from a mosaic of water pools, vegetation and mud (
M class). Adjacent non-water environments are also identified as vegetated land (
V class) and bare soil (
S class). After spectral analyses, Amani et al. [
30] concluded that the spectral indices derived from the NIR, RE and red bands (e.g., NDWI and NDVI) were the most useful spectral bands for the differentiation of wetland land cover. They also found that the SWIR bands helped to discriminate the shallow water class from other wetland classes. In this application, the distribution of index values for the four land cover classes (
W,
M,
S,
V) was computed (
Figure 4). The analysis showed that the NDWI index is useful to distinguish the open water condition, and the MNDWI allows us to classify the areas characterized by a mosaic of shallow water, mud and vegetation. Finally, the NDVI index allows us to distinguish bare soil from vegetated soil. Therefore, the proposed combination of these indices in a rule-based classification enhances the discrimination properties and reduces the ambiguity of each index. Amani et al. [
30] pointed out that the SWIR band is sensitive to the moisture content in soil and vegetation. This could lead to possible misclassification between wet soil and shallow water conditions. However, this aspect was not observed with the index combination proposed in this work (see
Figure 4 and
Figure 6 and
Table 7 and
Table 8). Considering the strong spatial and temporal variability of humidity conditions, further analysis, at different times of the year, could help to determine the possible occurrence of misclassification at particular times or locations.
The threshold values that we used for the NDVI, MNDWI and NDWI are literature values and were not calibrated against data of the specific study area. Since these literature values have been verified by different authors in different contexts, it is reasonable to suppose that they are not dependent on the specific study case. Consequently, we believe that the thresholds would still be valid and the classification rules would be applicable in other wetlands with different characteristics. Further analysis could investigate whether and to what extent the accuracy of the results may vary in different contexts. The availability of ground truths is important to relate remotely sensed data to real features and the correct land cover on the ground. The processing of the ground truth data with manual operation or a qualitative comparison by visual inspection can be influenced by the subjective interpretation of the operator. It is worth nothing that, in the present case, the ground truths were used for the validation of the method and not for calibration of the parameters. Consequently, potential subjectivity would affect the performance evaluation and not the classification results. To exploit the different types of data available, we implemented three different procedures for comparing the classification results to ground truth. Of course, different levels of objectivity and reliability correspond to each of the procedures. Undoubtedly, the most stringent validation test for the proposed classification method was the pixel-based one (case 1), in which the ground truth was obtained by the contextual use of geo-located ground pictures and VHR images. The combination of these two different types of data allowed us to obtain a more objective and reliable ground truth than the widespread practice of using only remote images. The overall accuracy was very high for both datasets (0.985 for S2 and 0.965 for L8). The F1 score values were 0.996 (0.983) for the W class, 0.970 (0.895) for the M class, 0.966 (0.946) for the S class and 0.969 (0.968) for the V class. The L8 results are reported in brackets next to the S2 ones. The identification of the M class showed the most significant difference between S2 and L8 metrics (difference between F1 scores higher than 0.02). The slightly lower performance of L8 data in M class identification could be due to the lower spatial resolution of the L8 images, which had the greatest impact when the patchiness of land cover features was higher, as in the M class. Further differences could be due to the slightly different frequency bands acquired by the two sensors. This point was further investigated by comparing L8 and S2 images acquired on the same day, which is discussed below.
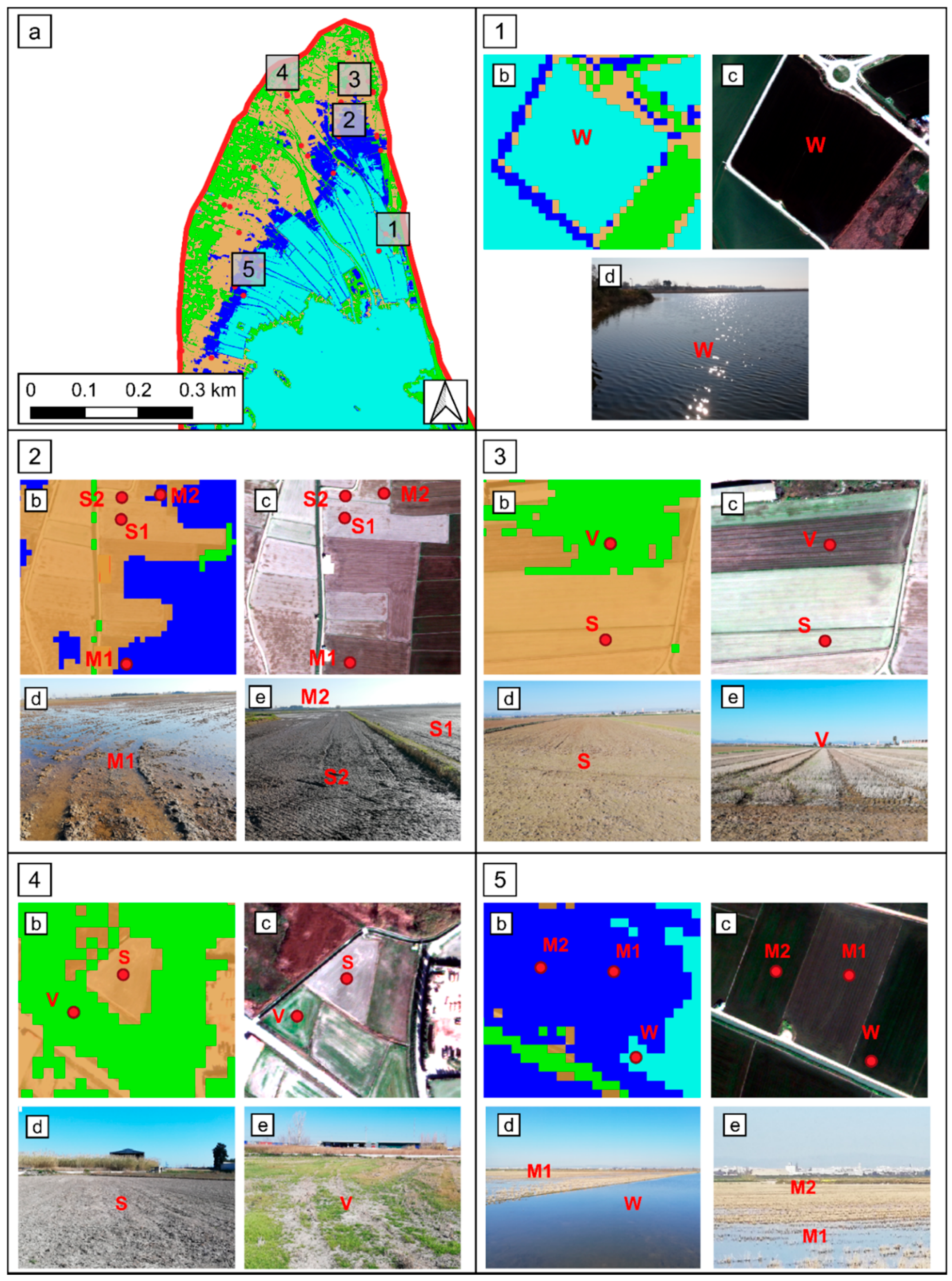
The same ground truth data of case 1 were also used for a visual inspection of the results (see the examples reported in
Figure 6). This analysis showed how the method could discriminate surfaces with similar characteristics, such as humid soil and isolated pools of water. Since wetlands are highly variable over time, with a seasonal regime, it was necessary to verify the performance of the classification tool throughout the year. This was done through qualitative validation tests of cases 3, 4, 5 and 6. These validation tests confirmed the high classification capacity of the method and allowed us to verify that the results were stable regardless of the particular conditions of the day of acquisition.
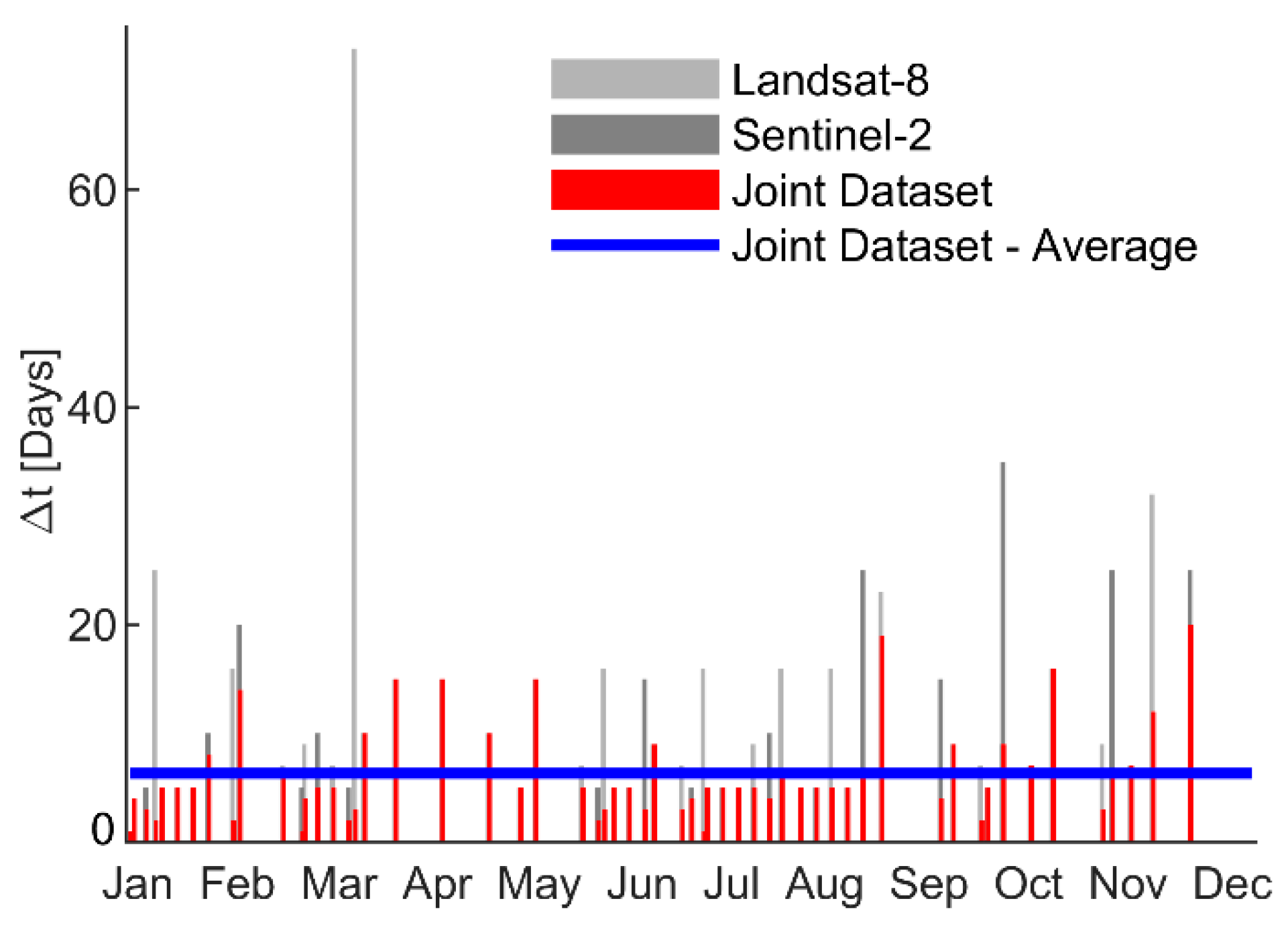
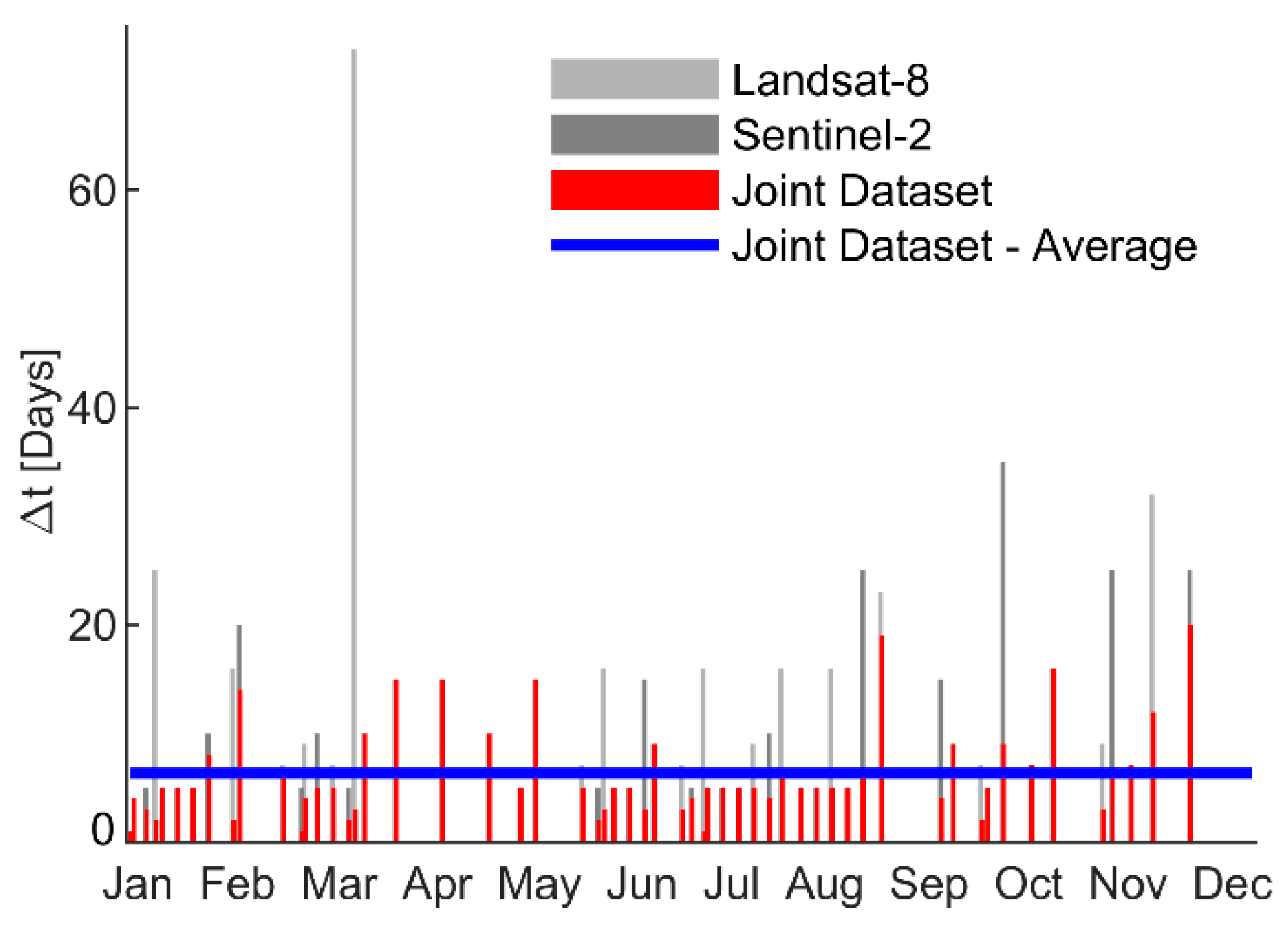
The revisit time of multispectral imagery can be highly impacted by the possible presence of the cloud cover. In order to mitigate this problem, we jointly used the two S2 and L8 datasets. In this way, the average revisit time between two cloud-free images dropped from 18 and 16 days for the L8 and S2 separate datasets to 6 days for the merged dataset. The possibility of integration of the two datasets was investigated by Mandanici and Bitelli [
27]. They performed tests on images acquired with a time gap lower than 20 min and demonstrated a good correlation between corresponding bands of the two sensors. However, the radiometric characteristics of the two sensors were not identical. The authors suggested evaluating the impact of such discrepancies for each specific application, depending on the adopted methodology and the aim of the study. In this work, with the objective of providing a tool that is extremely easy to apply, the two datasets were separately processed, and the land cover maps were obtained independently for the S2 and the L8 datasets. To verify the validity of this approach, it is sufficient to verify the coherence between the classification results obtained by the two datasets. The direct comparison of the land cover classification, derived from S2 and L8 acquisitions made on the same days, showed satisfying coherence (overall accuracy between 0.848 and 0.944). The detailed analysis of the performance for the different classes showed that, when the flooding is scarcely present and scattered, pixels classified by L8 as the
M class were placed by S2 in other classes. This is probably due to the lower spatial resolution of L8, which induces a sort of spatial average, thus shifting the response towards classes characterized by higher patchiness (i.e., the
M class). Another small discrepancy was found between the
V and
S classes. In particular, L8 tended to classify as
V class pixels that S2 classified as
S class. These discrepancies may be adjusted by calibrating the threshold of the NDVI index separately for the L8 and S2. A further confirmation of the overall coherence between S2 and L8 classifications is reported in
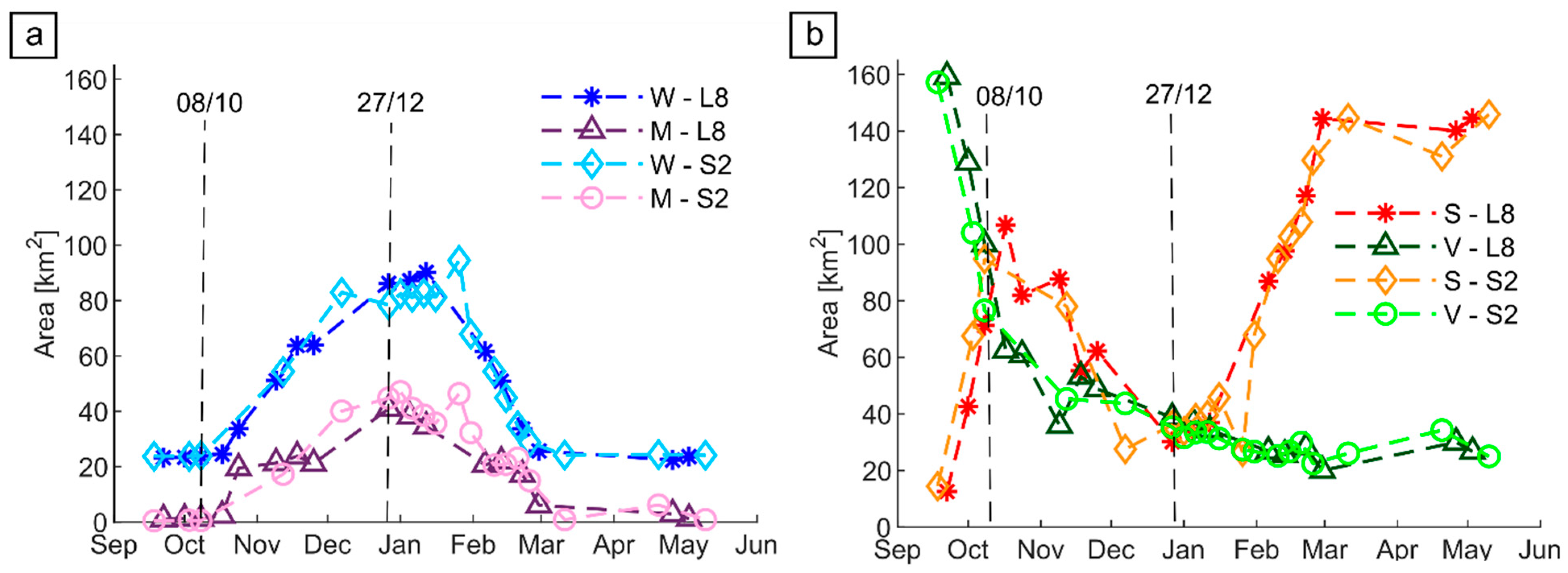
Figure 8, showing that the temporal trends of estimated areas in different classes are similar for the two datasets. This result is particularly significant because it shows how, despite the high dynamism of the wetland context, the coherence between the two datasets was quite stable over time.
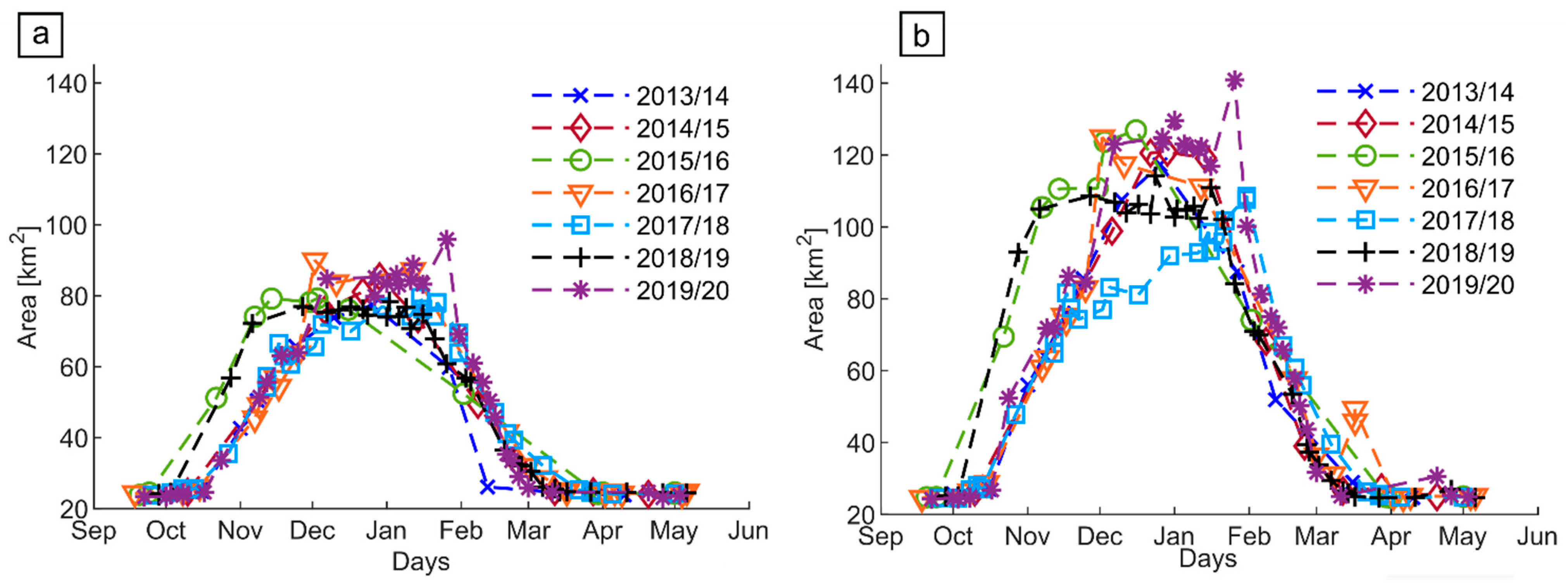
The possibility of mapping the four classes and quantifying the extent of submerged areas (
W and
M classes) showed interesting aspects of the hydrometric regime of the Albufera wetland. The spatial extension of the
W class has an approximately constant trend from year to year, while the surface in the
M class is more variable (see
Figure 10). This can be explained by the fact that the surface classified as the
W class is influenced by agricultural practices. The farmers can dry the rice fields easily and quickly by using pumps and opening the gates that connect the rice fields with the lake. The time at which the rice fields are dried up is decided by the irrigation communities and it is quite constant throughout the years. The variability of the
M class over time can be explained by the fact that it may not depend on irrigation and agricultural practices only. Indeed, a mosaic of water, mud and vegetation (
M class) can be observed also after intense precipitation or generated by high evapotranspiration.
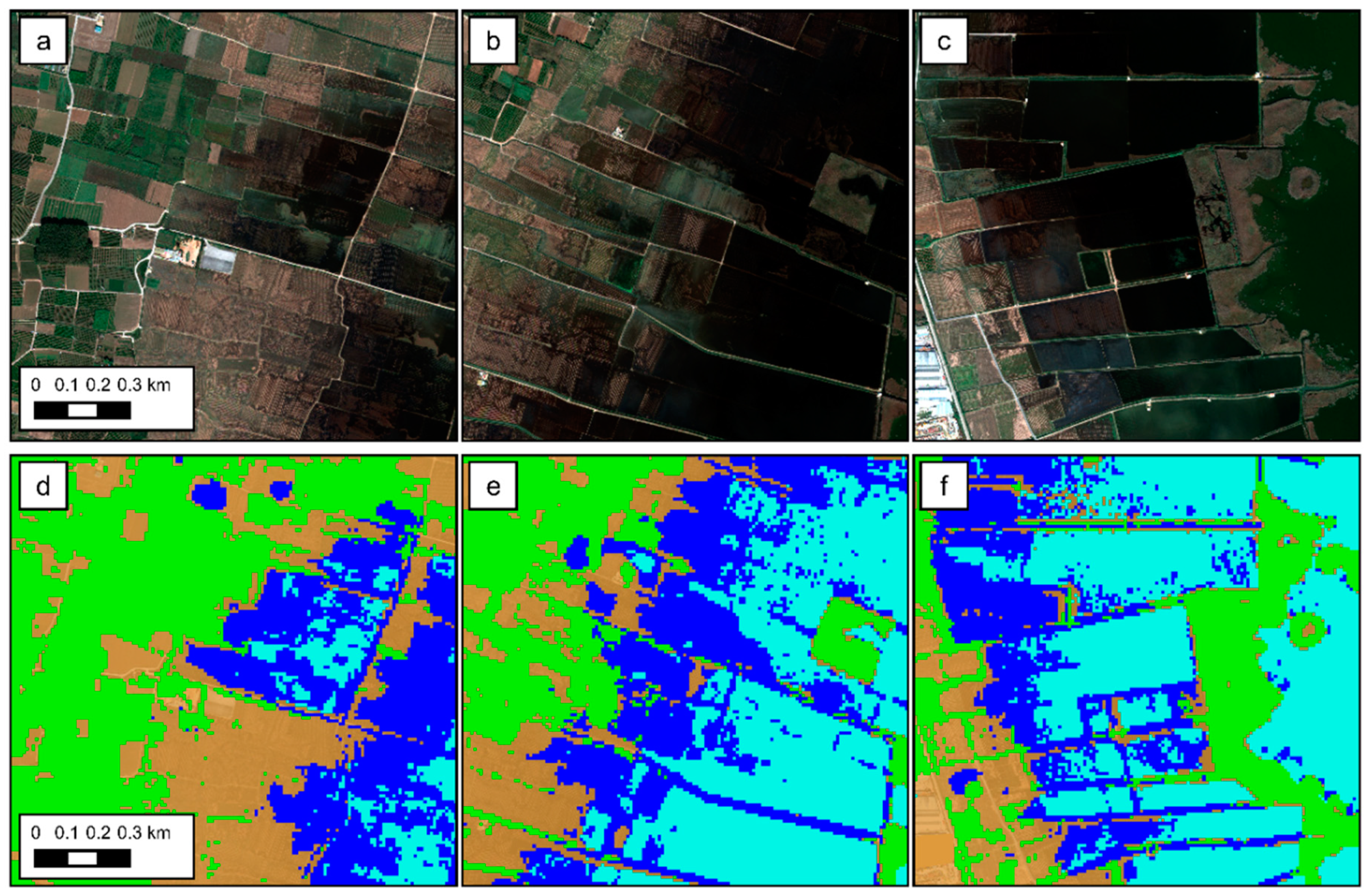
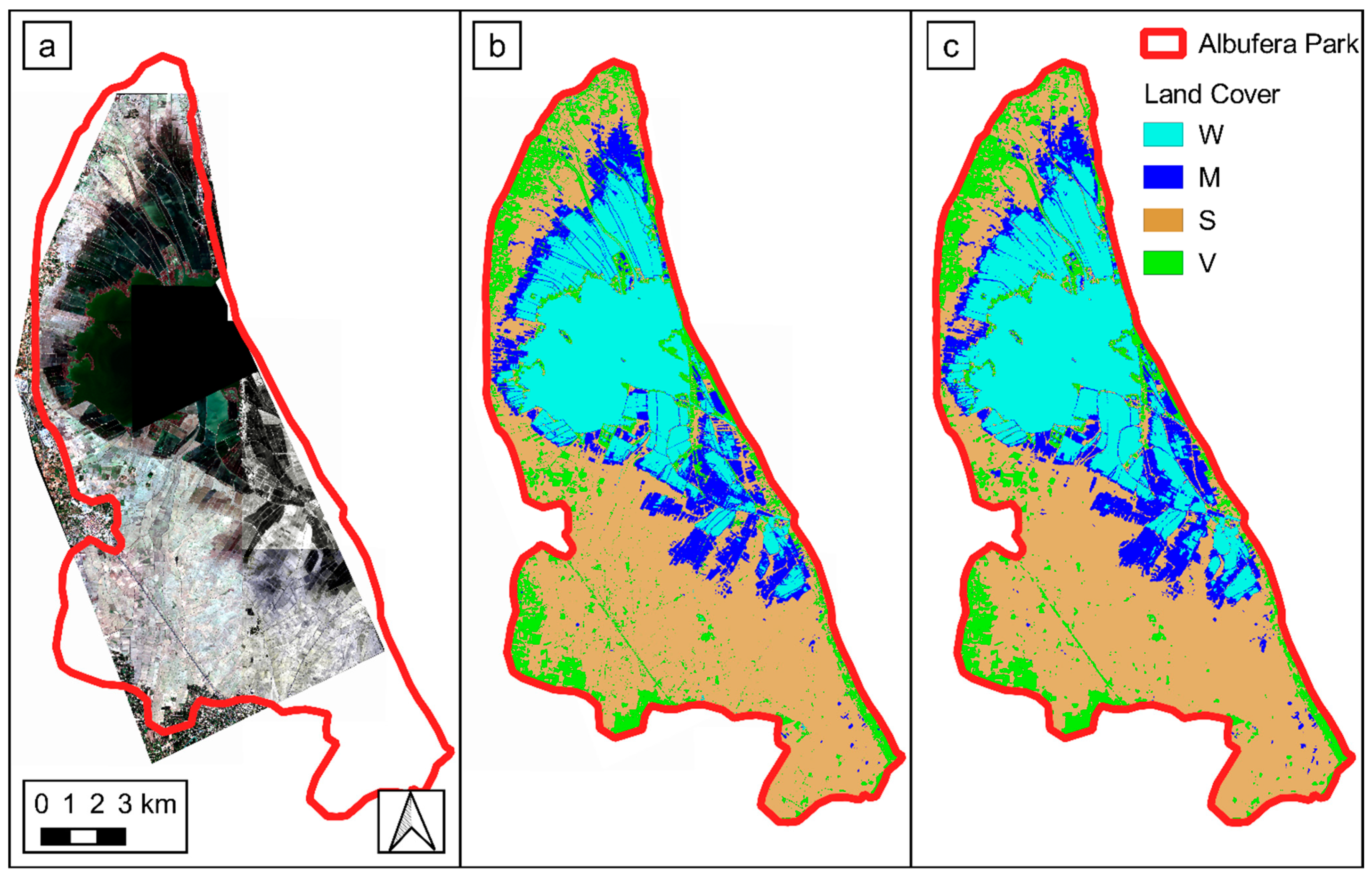
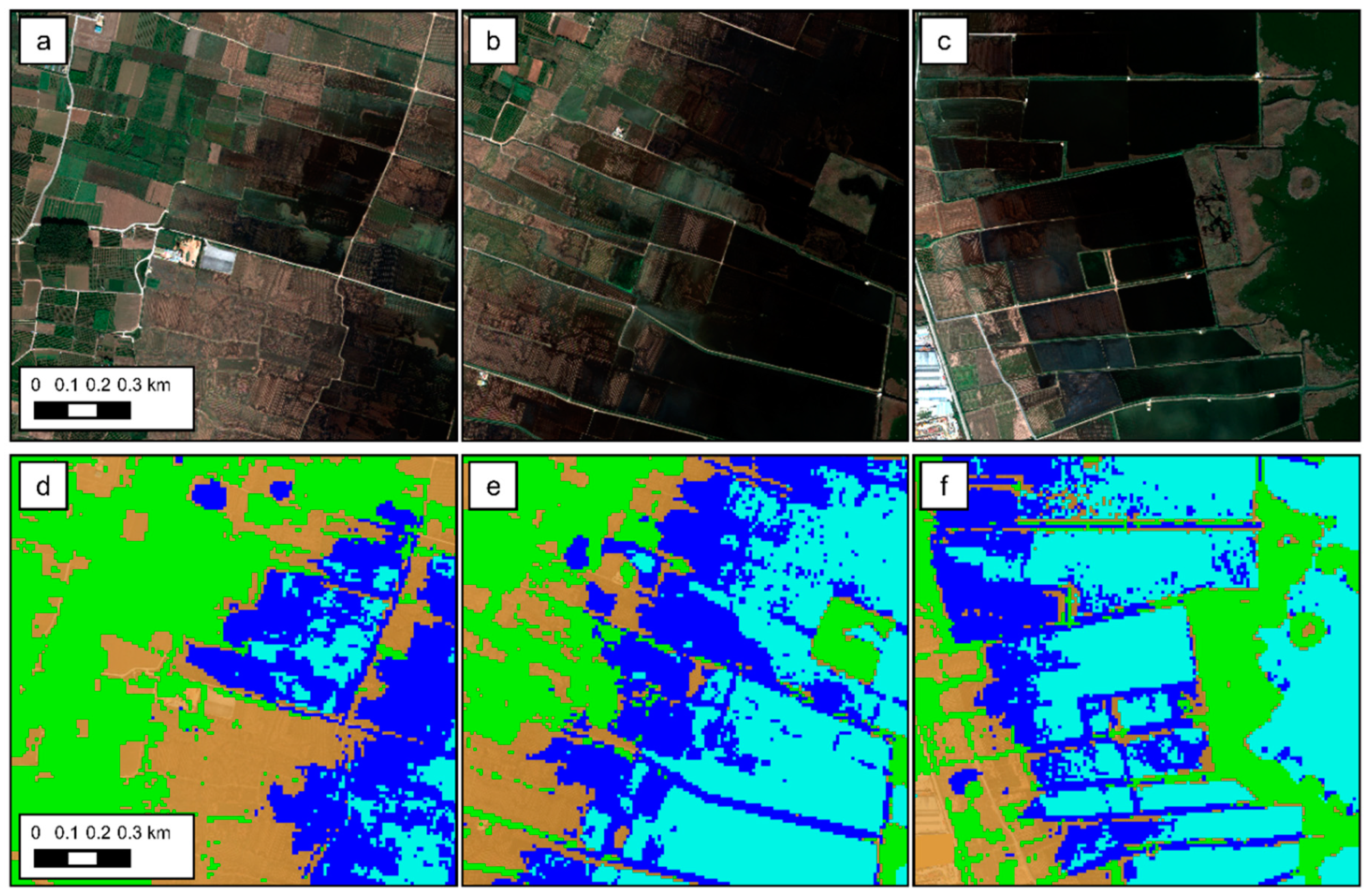
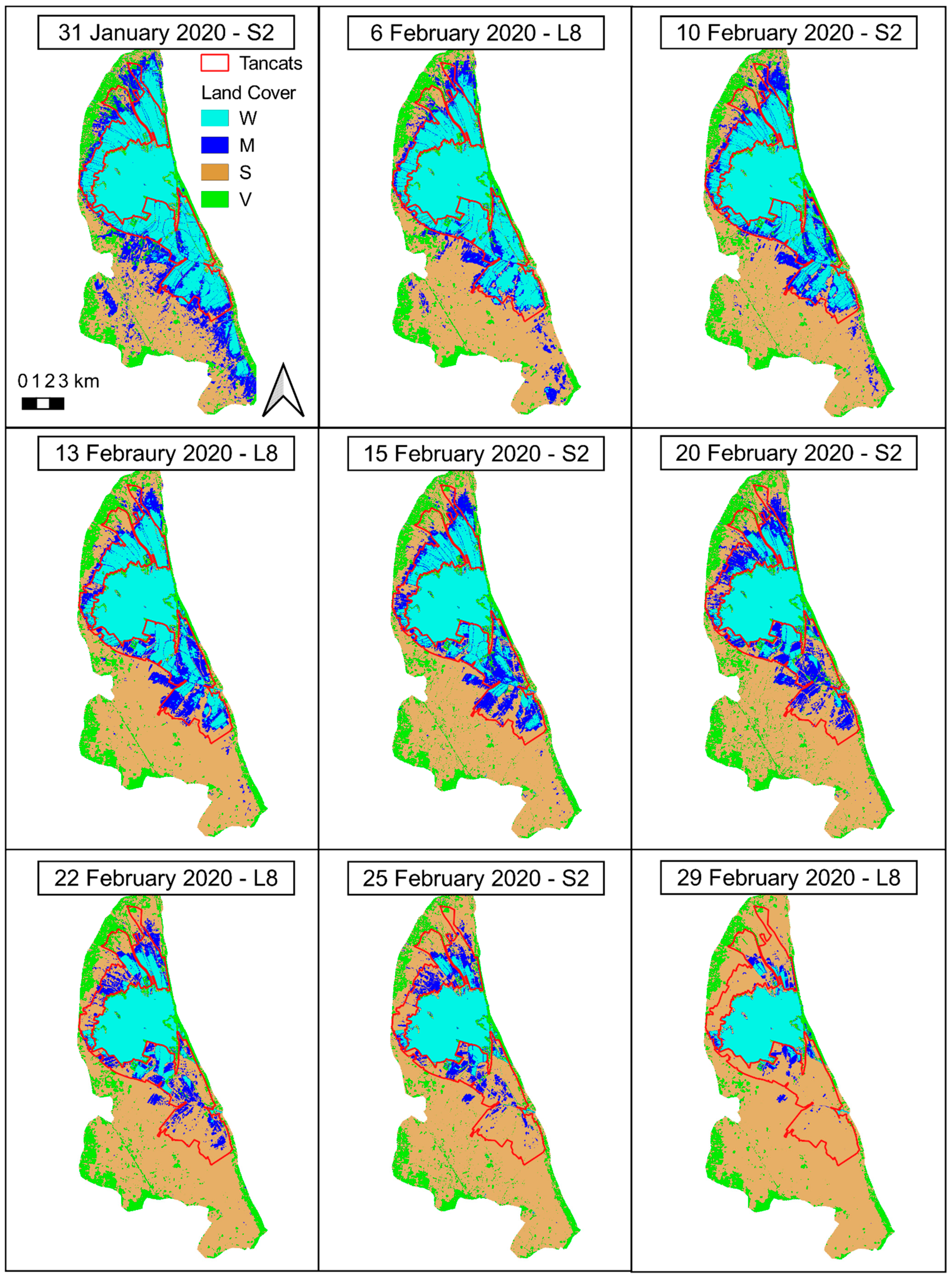
Land cover maps, such as those shown in
Figure 11, can be very useful for observing in detail the spatial distribution of the land cover and its evolution over time. For example, in 2019, the
Tancats were flooded with high water depth in January and started emptying from the middle of February. In the southern area, the water depths started decreasing first and lasted until the end of February. Meanwhile, in the northern portion, the decrease began later and was more rapid. This is probably due to the different ways in which the emptying is carried out, as pumps are sometimes used to accelerate the drying up in the
Tancats near the lake, while in the areas further away from the lake, the process takes place more slowly. Flood duration maps of the kind shown in
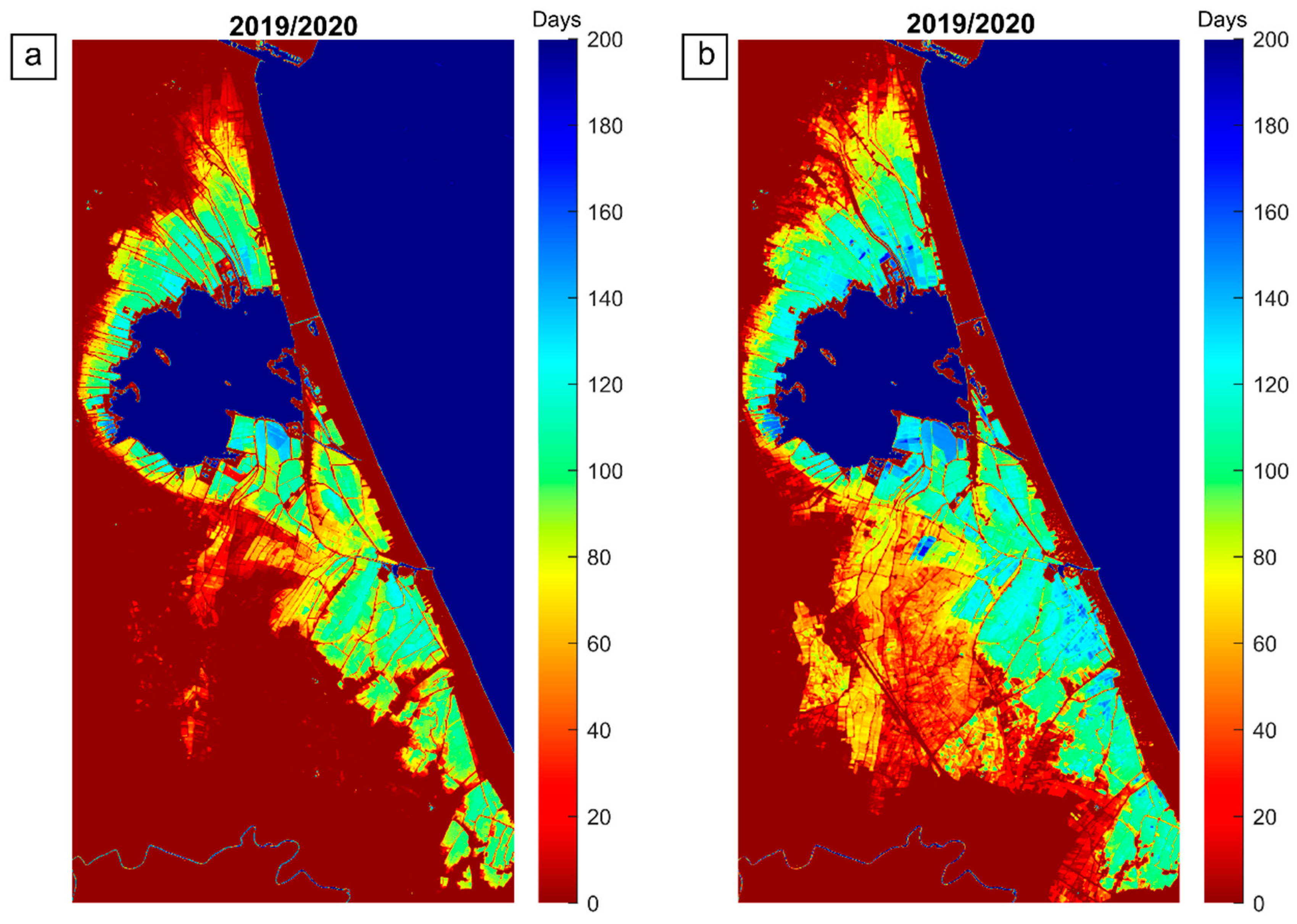
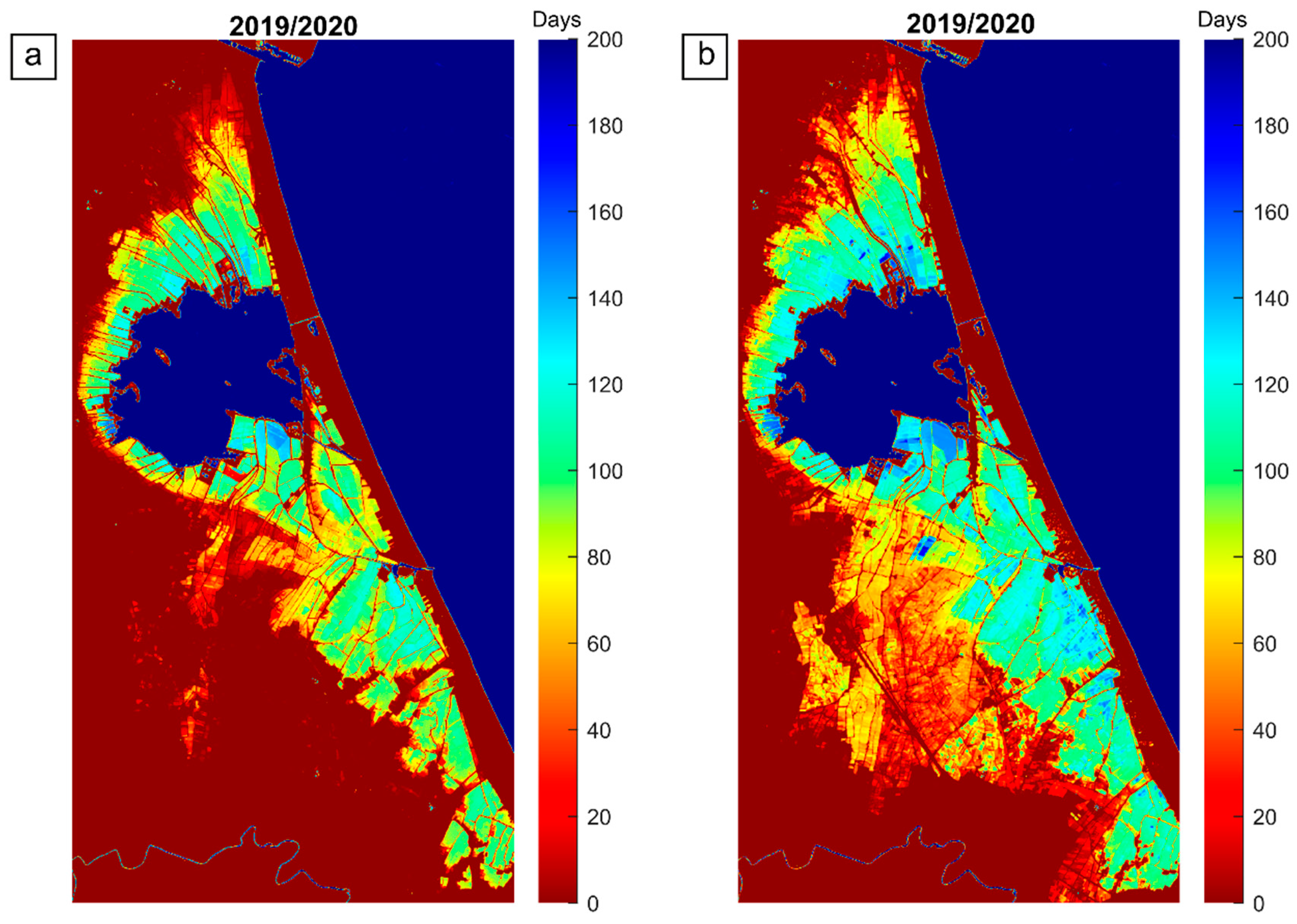
Figure 12 can be produced for all years of observation and are particularly useful for the estimation of habitat availability for water-related species. The difference between the duration of the
W and the
M conditions is particularly evident in the highlands. The occasional and sparse presence of the
M condition for short time intervals, as shown in
Figure 12b, could be due to rainfall events and it can be independent of the artificial management of the wetland.
7. Conclusions
Artificial wetlands play a key role in the strategies to limit the decline of freshwater biodiversity. The timing, duration and extension of periodical flooding are crucial for the survival of many freshwater species. For this reason, continuous monitoring is essential to optimize water resources and quantify habitat availability for water-related organisms. In this work, remote sensing Landsat-8 (L8) and Sentinel-2 (S2) multispectral images were exploited to monitor the Albufera wetland (Spain).
The combination of three multispectral indices, NDWI, MNDWI and NDVI, allowed the implementation of an unsupervised, rule-based method for the automatic classification of four land cover classes: open water (W), mosaic of water, mud and vegetation (M), bare soil (S) and vegetated soil (V). The proposed method is simple and easily usable in practical applications. The MNDWI index, which exploits the SWIR band, allowed to distinguish the M class, characterized by shallow water depths or by patches of water, mud and/or vegetation. The comparison with ground truth data showed overall good agreement (overall accuracy equal to 0.985 for S2 and 0.965 for L8). The validation tests between the L8 and S2 datasets were performed on six days on which both L8 and S2 acquisitions were available. The overall accuracy was always higher than 0.840. The difference in radiometric characteristics and spatial resolution led to small discrepancies in peculiar conditions and classes, such as the occasional overestimation of the M class by the less resolute L8 images.
The joint use of the two datasets provides the advantage of reducing the revisit time; in the analyzed period, the maximum time interval between two cloud-free images was 120 and 57 days for S2 and L8, respectively, while, for the merged dataset, the maximum revisit time was reduced to 16 days.
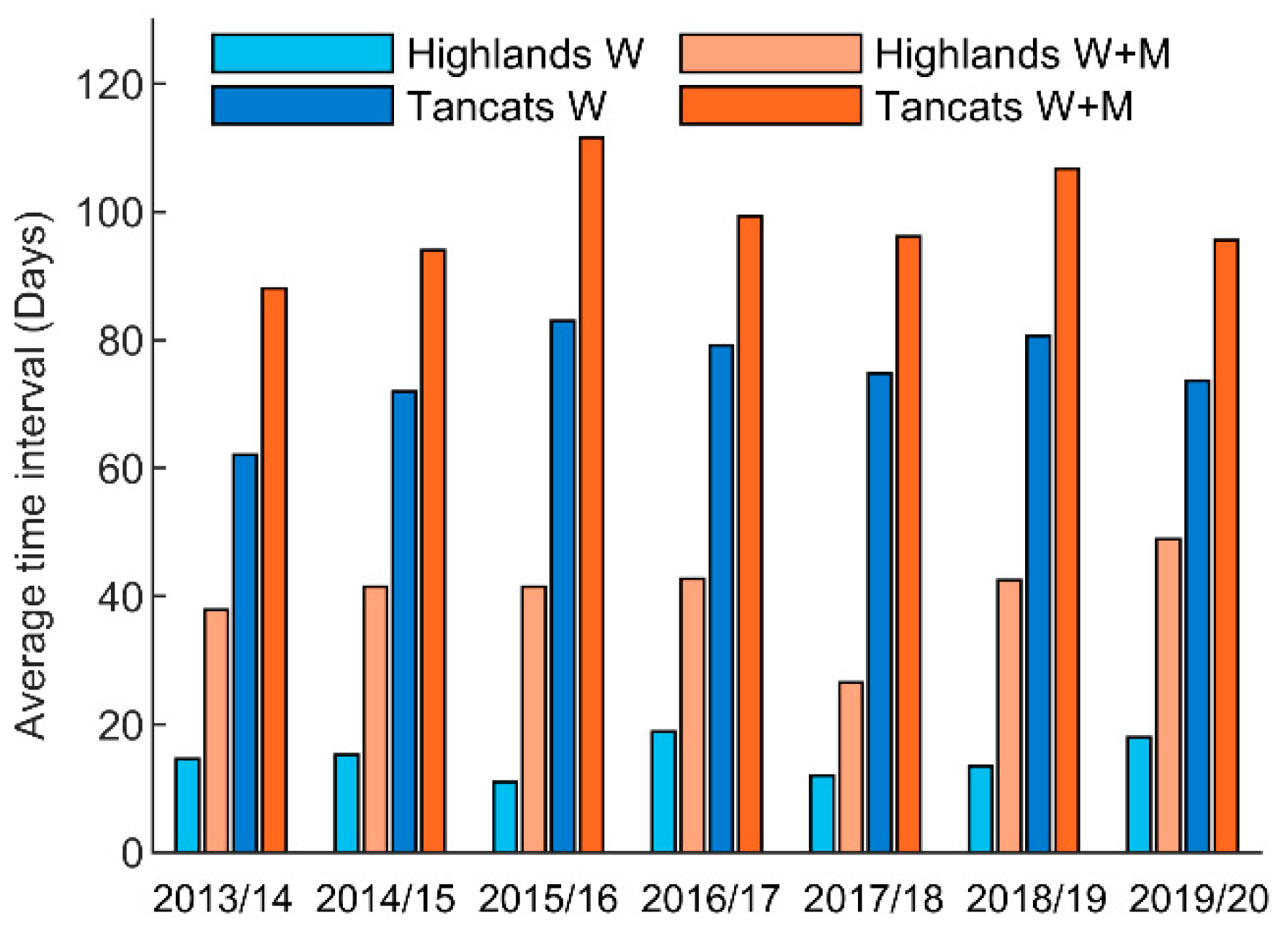
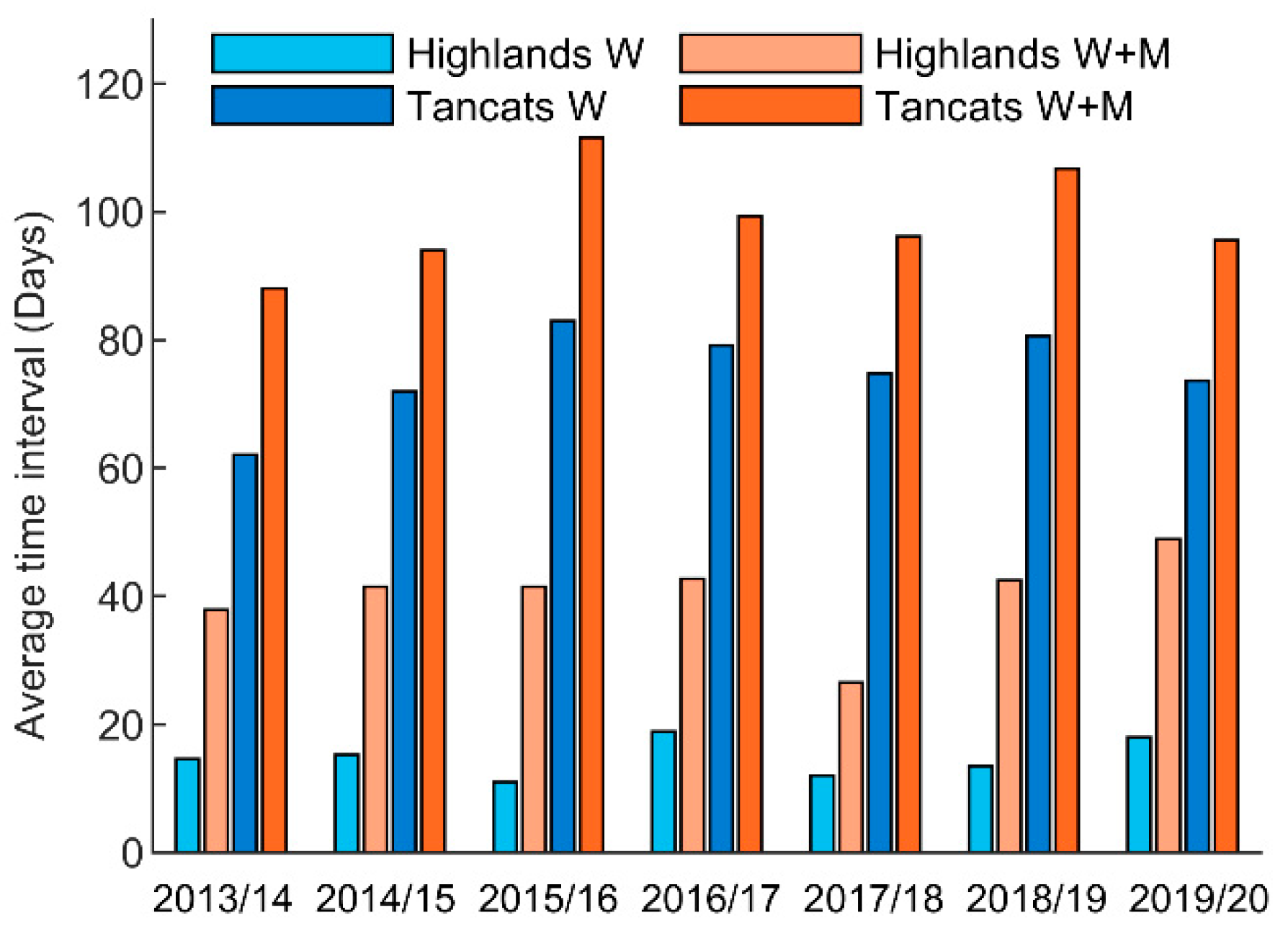
The implemented method allowed to monitor the flooding dynamics of the wetland from 2013 to the present. Both the maximum extent of the flooding and its timing and duration showed differences from year to year. The analyses of the yearly flooding duration showed that the highlands are in the W class, on average, for less than 20 days, and the Tancats are in this class for between 60 and 80 days. Given the short duration of the open water condition (W class), the duration of the time interval in which there are shallow waters or isolated pools (M class) could be crucial for habitat availability. The overall presence of water (M plus W land cover classes) lasted, on average, around 40 days in the highlands and for a period between roughly 90 and 110 days in the Tancats. The automatic land cover classification can be very useful for water management in wetland environments. Monitoring and observing in detail the spatial distribution of submerged areas and their evolution over time may provide important insights that can be used establish the proper timing and duration of flooding in order to support both rice production and habitats for water-related organisms. In wetlands, where there is significant flood risk, the method can also be used to observe the effects of extreme precipitation events and to assess their relative hazard.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}