
Wheat Yield Prediction Based on Unmanned Aerial Vehicles-Collected Red–Green–Blue Imagery

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Trial Site and Experimental Setup
2.2. Field Data Collection
2.3. Image Acquisition and Processing
2.3.1. Image Data Acquisition and Processing
2.3.2. Data Analysis and Modelling Method
2.4. Model Evaluation
3. Results and Discussion
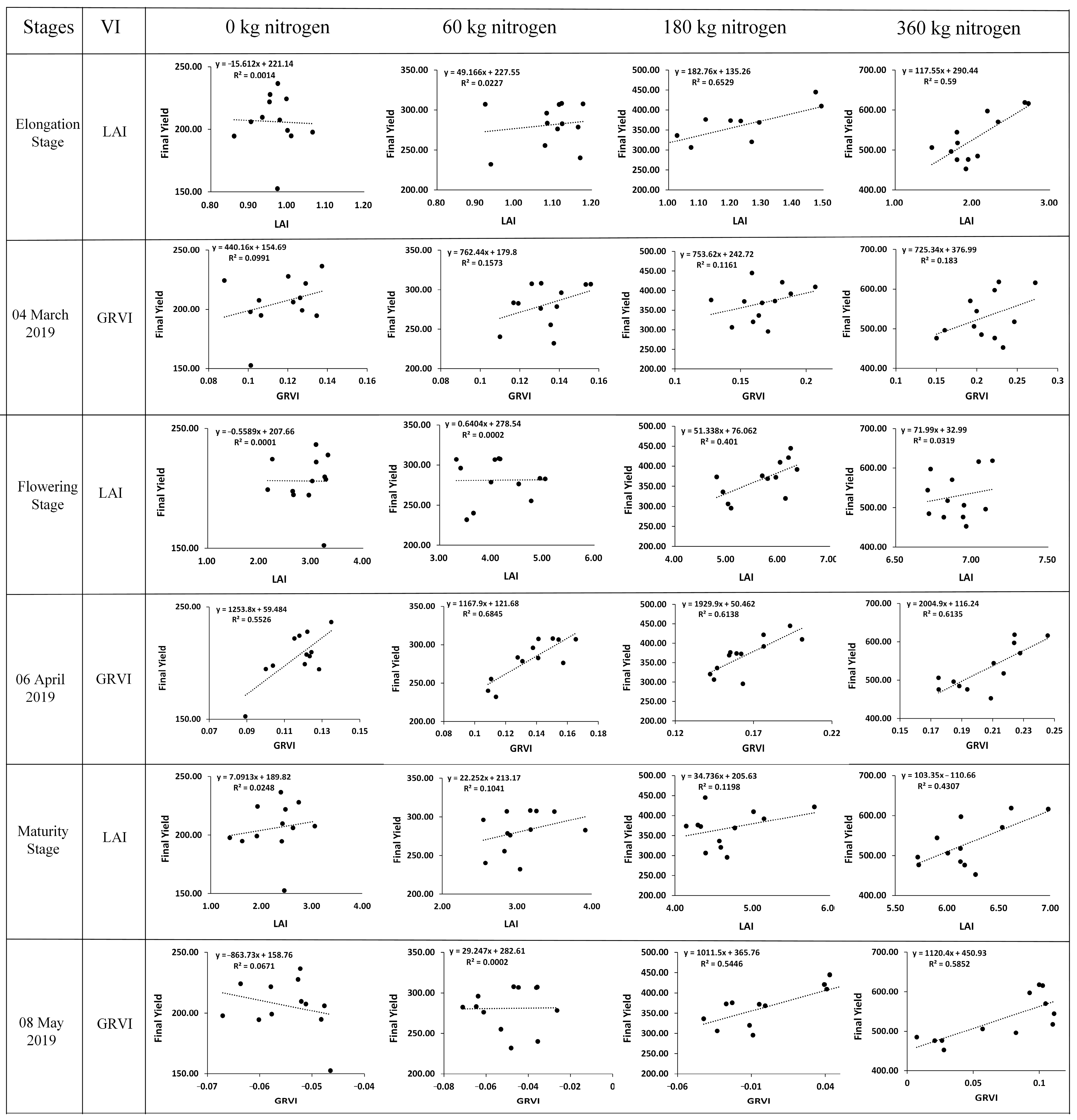
3.1. Relationships between Grain Yield and Color Indices at a Single Stage
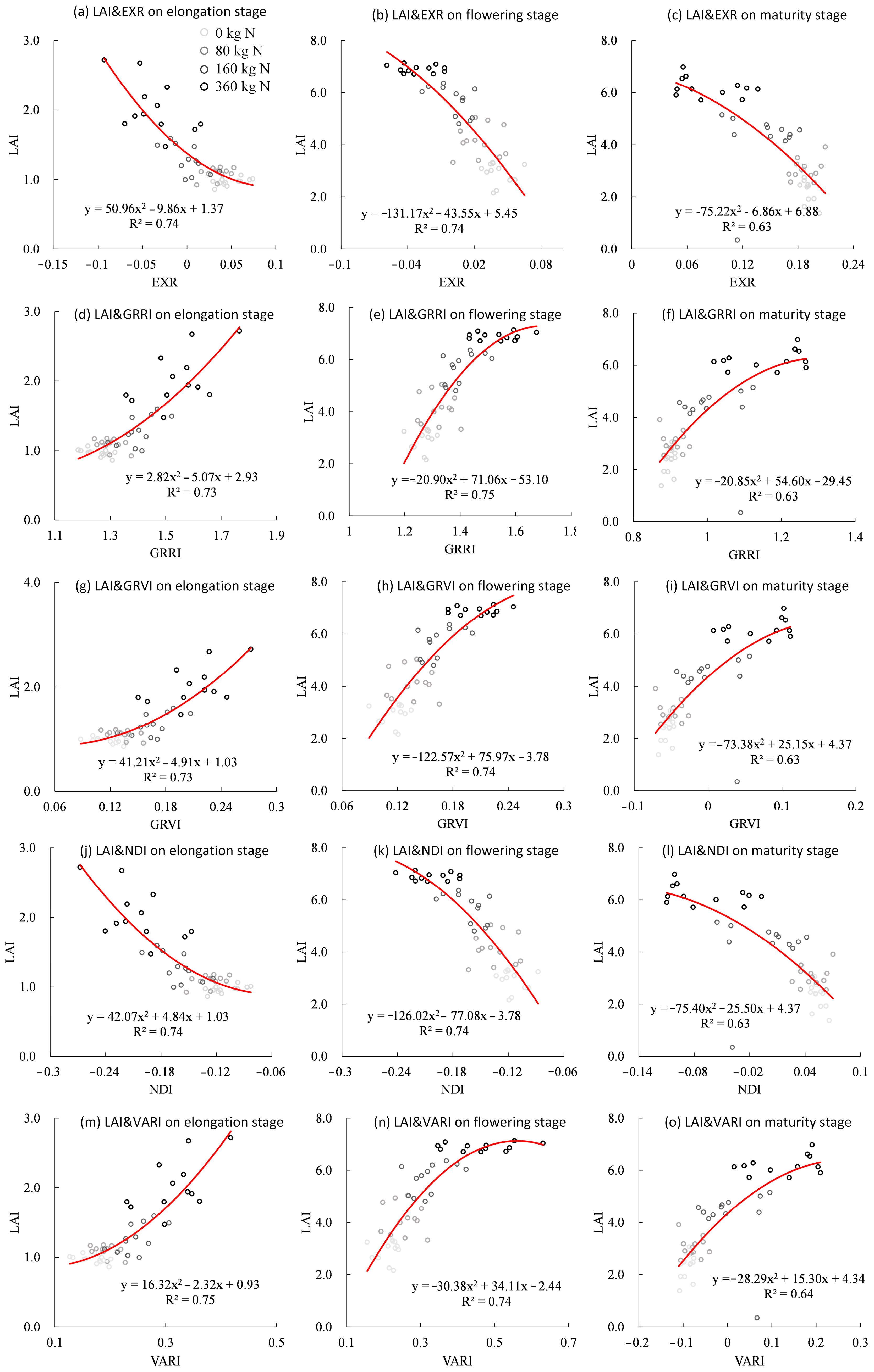
3.2. Relationship between LAI and Color Indices
3.3. Relationships between Grain Yield and Thermal, Structure, and Volumetric Metrics at a Single Stage
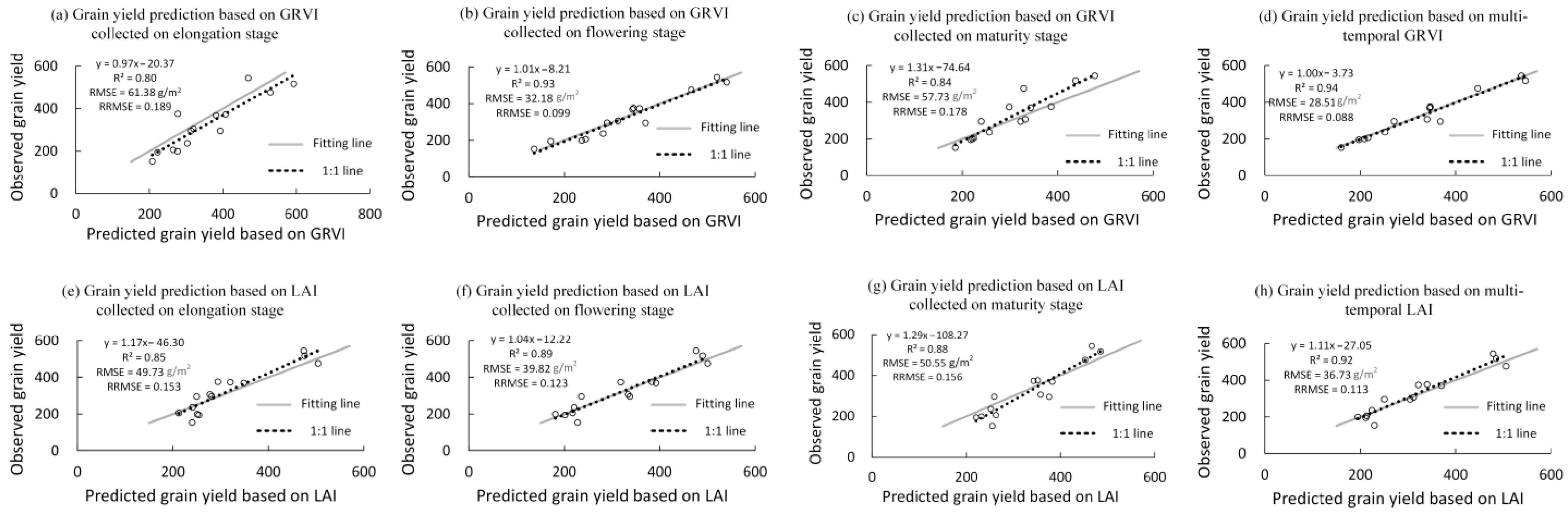
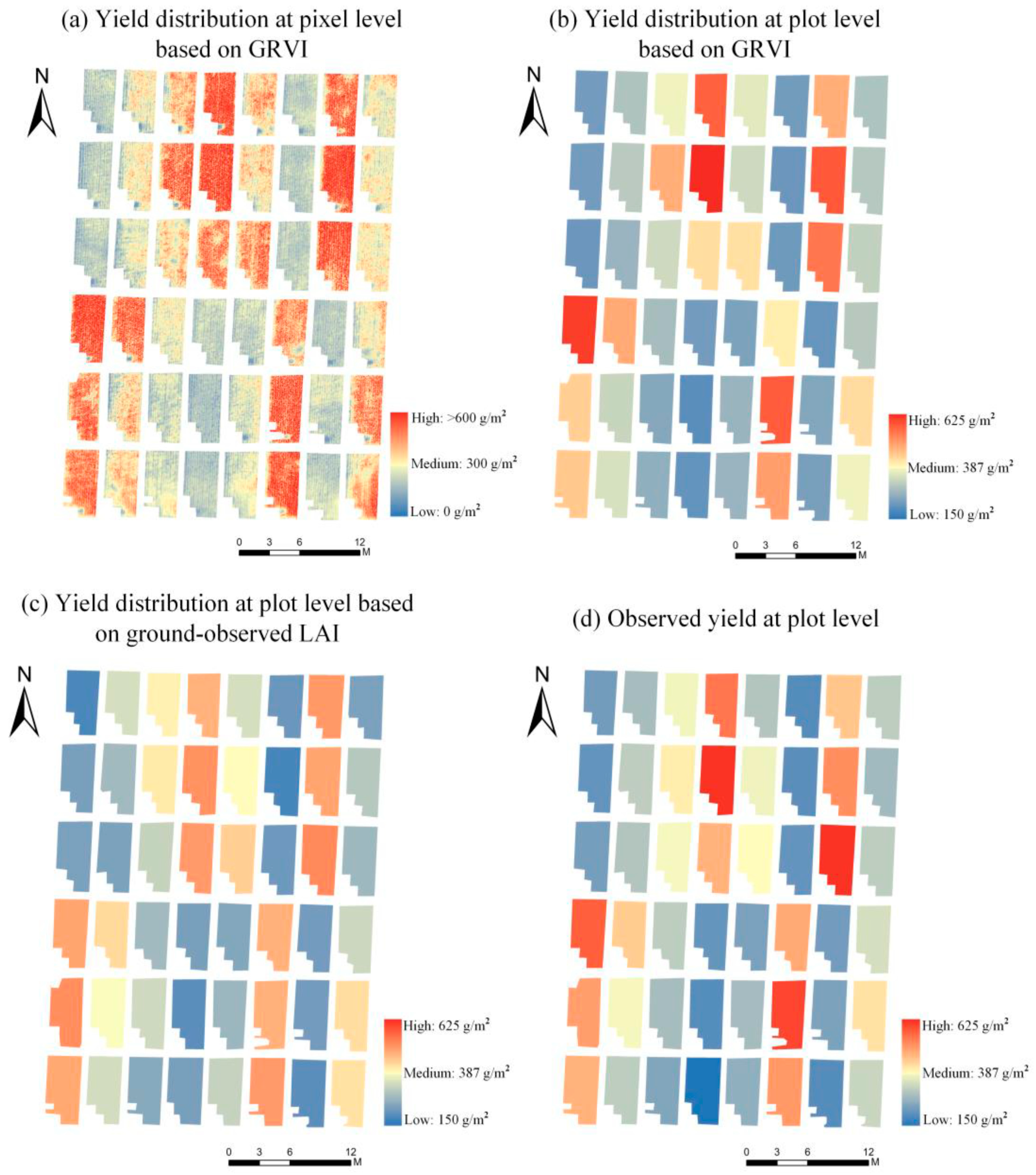
3.4. Grain Yield Estimation Based on LAI and GRVI
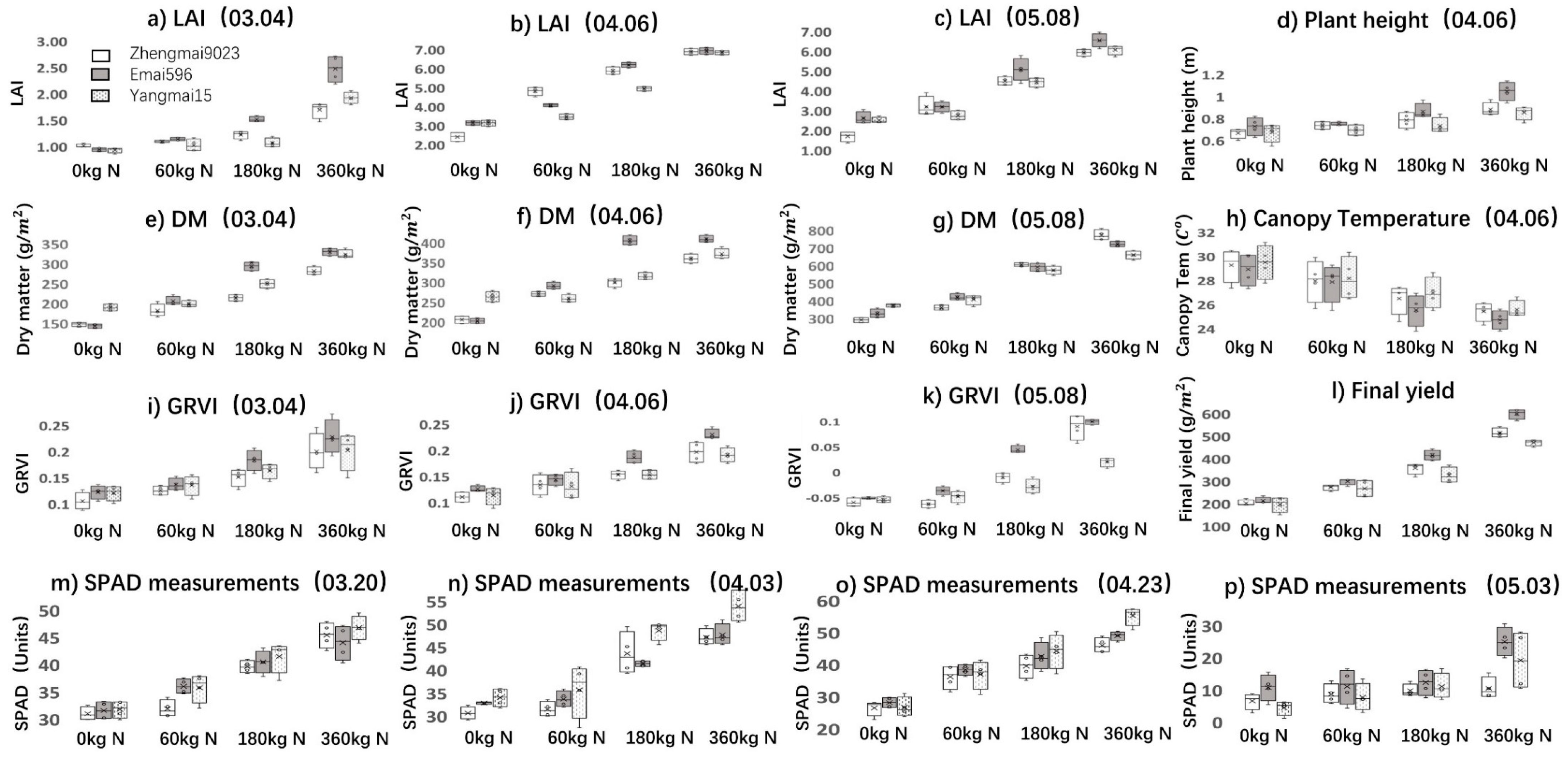
3.5. Relationship between Grain Yield and LAI, DM, Chlorophyll Content, and Color Indices under Different Genotypes and Nitrogen Fertilizations
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, X.; Zheng, H.B.; Xu, X.Q.; He, J.Y.; Ge, X.K.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.X.; Tian, Y.C. Predicting grain yield in rice using multi-temporal vegetation indices from UAV-based multispectral and digital imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 246–255. [Google Scholar] [CrossRef]
- Han, J.; Zhang, Z.; Cao, J.; Luo, Y.; Zhang, L.; Li, Z.; Zhang, J. Prediction of winter wheat yield based on multi-source data and machine learning in China. Remote Sens. 2020, 12, 236. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; Shi, L.; Han, J.; Zha, Y.; Zhu, P. Deep convolutional neural networks for rice grain yield estimation at the ripening stage using UAV-based remotely sensed images—ScienceDirect. Field Crop. Res. 2019, 235, 142–153. [Google Scholar] [CrossRef]
- Wang, L.; Tian, Y.; Yao, X.; Zhu, Y.; Cao, W. Predicting grain yield and protein content in wheat by fusing multi-sensor and multi-temporal remote-sensing images. Field Crop. Res. 2014, 164, 178–188. [Google Scholar] [CrossRef]
- Reynolds, C.A.; Yitayew, M.; Slack, D.C.; Hutchinson, C.F.; Huete, A.; Petersen, M.S. Estimating crop yields and production by integrating the FAO Crop Specific Water Balance model with real-time satellite data and ground-based ancillary data. Int. J. Remote Sens. 2000, 21, 3487–3508. [Google Scholar] [CrossRef]
- Ren, J.; Chen, Z.; Zhou, Q.; Tang, H. Regional yield estimation for winter wheat with MODIS-NDVI data in Shandong, China. Int. J. Appl. Earth Obs. Geoinf. 2008, 10, 403–413. [Google Scholar] [CrossRef]
- Schut, A.G.T.; Traore, P.C.S.; Blaes, X.; De By, R.A. Assessing yield and fertilizer response in heterogeneous smallholder fields with UAVs and satellites. Field Crop. Res. 2018, 221, 98–107. [Google Scholar] [CrossRef]
- Sakamoto, T.; Gitelson, A.A.; Arkebauer, T.J. MODIS-based corn grain yield estimation model incorporating crop phenology information. Remote Sens. Environ. 2013, 131, 215–231. [Google Scholar] [CrossRef]
- Xue, L.H.; Cao, W.X.; Yang, L.Z. Predicting grain yield and protein content in winter wheat at different N supply levels using canopy reflectance spectra. Pedosphere 2007, 17, 646–653. [Google Scholar] [CrossRef]
- Becker-Reshef, I.; Vermote, E.; Lindeman, M.; Justice, C. A generalized regression-based model for forecasting winter wheat yields in Kansas and Ukraine using MODIS data. Remote Sens. Environ. 2010, 114, 1312–1323. [Google Scholar] [CrossRef]
- Kanning, M.; Kühling, I.; Trautz, D.; Jarmer, T. High-resolution UAV-based hyperspectral imagery for LAI and chlorophyll estimations from wheat for yield prediction. Remote Sens. 2018, 10, 2000. [Google Scholar] [CrossRef] [Green Version]
- Pantazi, X.E.; Moshou, D.; Alexandridis, T.; Whetton, R.L.; Mouazen, A.M. Wheat yield prediction using machine learning and advanced sensing techniques. Comput. Electron. Agric. 2016, 121, 57–65. [Google Scholar] [CrossRef]
- Cai, Y.; Guan, K.; Lobell, D.; Potgieter, A.B.; Wang, S.; Peng, J.; Xu, T.; Asseng, S.; Zhang, Y.; You, L.; et al. Integrating satellite and climate data to predict wheat yield in Australia using machine learning approaches. Agric. For. Meteorol. 2019, 274, 144–159. [Google Scholar] [CrossRef]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; Mcmurtrey, J.E.; Walthall, C.L. Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Ghulam, A.; Sidike, P.; Hartling, S.; Maimaitiyiming, M.; Peterson, K.; Shavers, E.; Fishman, J.; Peterson, J.; Kadam, S. Unmanned Aerial System (UAS)-based phenotyping of soybean using multi-sensor data fusion and extreme learning machine. ISPRS J. Photogramm. Remote Sens. 2017, 134, 43–58. [Google Scholar] [CrossRef]
- Schirrmann, M.; Giebel, A.; Gleiniger, F.; Pflanz, M.; Lentschke, J. Monitoring agronomic parameters of winter wheat crops with low-cost UAV imagery. Remote Sens. 2016, 8, 706. [Google Scholar] [CrossRef] [Green Version]
- Gracia-Romero, A.; Kefauver, S.; Vergara Diaz, O.; Zaman-Allah, M.; Prasanna, B.; Cairns, J.; Araus, J. comparative performance of ground vs. aerially assessed RGB and multispectral indices for early-growth evaluation of maize performance under phosphorus fertilization. Front. Plant Sci. 2017, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Casadesús, J.; Kaya, Y.; Bort, J.; Nachit, M.; Araus, J.; Slama, A.; Ferrazzano, G.; Maalouf, F.; Maccaferri, M.; Martos, V.; et al. Using vegetation indices derived from conventional digital cameras as selection for wheat breeding in water-limited environments. Ann. Appl. Biol. 2007, 150, 227–236. [Google Scholar] [CrossRef]
- Zhou, B.; Elazab, A.; Bort, J.; Vergara, O.; Araus, J.L. Low-cost assessment of wheat resistance to yellow rust through conventional RGB images. Comput. Electron. Agric. 2015, 116, 20–29. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef] [Green Version]
- Harkel, J.T.; Bartholomeus, H.; Kooistra, L. Biomass and crop height estimation of different crops using UAV-based lidar. Remote Sens. 2019, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Raeva, P.L.; Šedina, J.; Dlesk, A. Monitoring of crop fields using multispectral and thermal imagery from UAV. Eur. J. Remote Sens. 2019, 52, 192–201. [Google Scholar] [CrossRef] [Green Version]
- Andrade-Sanchez, P.; Gore, M.A.; Heun, J.T.; Thorp, K.R.; Carmo-Silva, A.E.; French, A.N.; Salvucci, M.E.; White, J.W. Development and evaluation of a field-based high-throughput phenotyping platform. Funct. Plant Biol. 2013, 41, 68–79. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sankaran, S.; Quirós, J.J.; Miklas, P.N. Unmanned aerial system and satellite-based high resolution imagery for high-throughput phenotyping in dry bean. Comput. Electron. Agric. 2019, 165, 104965. [Google Scholar] [CrossRef]
- Yan, G.; Li, L.; Coy, A.; Mu, X.; Zhou, H. Improving the estimation of fractional vegetation cover from UAV RGB imagery by colour unmixing. ISPRS J. Photogramm. Remote Sens. 2019, 158, 23–34. [Google Scholar] [CrossRef]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: Current status and perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef] [PubMed]
- Fernandez-Gallego, J.A.; Kefauver, S.C.; Vatter, T.; Gutiérrez, N.A.; Nieto-Taladriz, M.T.; Araus, J.L. Low-cost assessment of grain yield in durum wheat using RGB images. Eur. J. Agron. 2019, 105, 146–156. [Google Scholar] [CrossRef]
- Córcoles, J.I.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle. Biosyst. Eng. 2013, 115, 31–42. [Google Scholar] [CrossRef]
- Kim, D.; Yun, H.; Jeong, S.; Kwon, Y.; Kim, S.; Lee, W.; Kim, H. Modeling and testing of growth status for Chinese cabbage and white radish with UAV-based RGB imagery. Remote Sens. 2018, 10, 563. [Google Scholar] [CrossRef] [Green Version]
- Su, J.; Coombes, M.; Liu, C.; Zhu, Y.; Chen, W.H. Machine learning based crop drought mapping system by UAV remote sensing RGB imagery. Unmanned Syst. 2020, 8, 71–83. [Google Scholar] [CrossRef]
- Vergara-Díaz, O.; Zaman-Allah, A.M.; Masuka, B.; Hornero, A.; Tejada-Pablo, Z.; Prasanna, M.B.; Cairns, E.J.; Araus, L.J. A novel remote sensing approach for prediction of maize yield under different conditions of nitrogen fertilization. Front. Plant Sci. 2016, 7, 666. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- FAO. The State of Food Insecurity in the World 2015. World’s Agriculture, Forestry and Fisheries: FAO News. 2015, Volume 316, pp. 3–8. Available online: http://www.fao.org/3/i4646e/i4646e.pdf (accessed on 10 July 2021).
- Bashir, M.T.; Ali, S.; Izni, A.; Harun, R.; Salmiaton, A. Impact of excessive nitrogen fertilizers on the environment and associated mitigation strategies. Asian J. Microbiol. Biotechnol. Environ. Sci. 2013, 15, 213–221. [Google Scholar]
- Lu, R.K. Analysis Methods of Soil Agro-Chemistrical; China Agriculture and Technology Press: Beijing, China, 2020; pp. 109, 147, 150, 180, 194. (In Chinese) [Google Scholar]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Maimaitiyiming, M.; Hartling, S.; Peterson, K.T.; Maw, M.J.W.; Shakoor, N.; Mockler, T.; Fritschi, F.B. Vegetation Index Weighted Canopy Volume Model (CVM VI) for soybean biomass estimation from Unmanned Aerial System-based RGB imagery. ISPRS J. Photogramm. Remote Sens. 2019, 151, 27–41. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Woebbecke, D.M.; Meyer, G.E.; Bargen, K.V.; Mortensen, D.A. Color indices for weed identification under various soil, residue, and lighting conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Kawashima, S.; Nakatani, M. An algorithm for estimating chlorophyll content in leaves using a video camera. Ann. Bot. 1998, 81, 49–54. [Google Scholar] [CrossRef] [Green Version]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially located platform and aerial photography for documentation of grazing impacts on wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Meyer, G.E.; Neto, J.O.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Mao, W.; Wang, Y.; Wang, Y. Real-time detection of between-row weeds using machine vision. In Proceedings of the 2003 ASAE Annual Meeting, Las Vegas, NV, USA, 27–30 July 2003. [Google Scholar]
- Saberioon, M.M.; Amin, M.S.M.; Anuar, A.R.; Gholizadeh, A.; Wayayok, A.; Khairunniza-Bejo, S. Assessment of rice leaf chlorophyll content using visible bands at different growth stages at both the leaf and canopy scale. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 35–45. [Google Scholar] [CrossRef]
- Kataoka, T.; Kaneko, T.; Okamoto, H.; Hata, S. Crop growth estimation system using machine vision. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003. [Google Scholar]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Buchaillot, M.; Romero, A.; Diaz, O.; Zaman-Allah, M.; Tarekegne, A.; Cairns, J.; Prasanna, B.; Araus, J.; Kefauver, S. Evaluating maize genotype performance under low nitrogen conditions using RGB UAV phenotyping techniques. Sensors 2019, 19, 1815. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shi, P.; Wang, Y.; Xu, J.; Zhao, Y.; Yuan, Z.; Sun, Q. Rice nitrogen nutrition estimation with RGB images and machine learning methods—ScienceDirect. Comput. Electron. Agric. 2020, 180, 105860. [Google Scholar] [CrossRef]
- Guo, Z.C.; Wang, T.; Liu, S.L.; Kang, W.P.; Zhi, Y. Biomass and vegetation coverage survey in the Mu Us sandy land-based on unmanned aerial vehicle RGB images. Int. J. Appl. Earth Obs. Geoinf. 2021, 94, 102239. [Google Scholar] [CrossRef]
- Bai, G.; Ge, Y.; Hussain, W.; Baenziger, P.S.; Graef, G. A multi-sensor system for high throughput field phenotyping in soybean and wheat breeding. Comput. Electron. Agric. 2016, 128, 181–192. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Peng, S.; Dionisio-Sese, M.L.; Laza, R.C.; Visperas, R.M. Grain filling duration, a crucial determinant of genotypic variation of grain yield in field-grown tropical irrigated rice. Field Crop. Res. 2008, 105, 221–227. [Google Scholar] [CrossRef]
- Verger, A.; Vigneau, N.; Chéron, C.; Gilliot, J.; Comar, A.; Baret, F. Green area index from an unmanned aerial system over wheat and rapeseed crops. Remote Sens. Environ. 2014, 152, 654–664. [Google Scholar] [CrossRef]
- Zhang, Q.; Schaaf, C.; Seto, K.C. The vegetation adjusted NTL urban index: A new approach to reduce saturation and increase variation in nighttime luminosity. Remote Sens. Environ. 2013, 129, 32–41. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide dynamic range vegetation index for remote quantification of biophysical characteristics of vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [Green Version]
- Jannoura, R.; Brinkmann, K.; Uteau, D.; Bruns, C.; Joergensen, R.G. Monitoring of crop biomass using true colour aerial photographs taken from a remote controlled hexacopter. Biosyst. Eng. 2015, 129, 341–351. [Google Scholar] [CrossRef]
- Gamon, J.A.; Field, C.B.; Goulden, M.L.; Griffin, K.L.; Hartley, A.E.; Joel, G.; Penuelas, J.; Valentini, R. Relationships between NDVI, canopy structure, and photosynthesis in three Californian vegetation types. Ecol. Appl. 1995, 5, 28–41. [Google Scholar] [CrossRef] [Green Version]
- Goel, N.S.; Qin, W. Influences of canopy architecture on relationships between various vegetation indices and LAI and Fpar: A computer simulation. Remote Sens. Rev. 1994, 10, 309–347. [Google Scholar] [CrossRef]
- Baret, F.; Guyot, G. Potentials and limits of vegetation indices for LAI and APAR assessment. Remote Sens. Environ. 1991, 35, 161–173. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Biju, S.; Fuentes, S.; Gupta, D. The use of infrared thermal imaging as a non-destructive screening tool for identifying drought-tolerant lentil genotypes. Plant Physiol. Biochem. 2018, 127, 11–24. [Google Scholar] [CrossRef]
- Monteith, J.; Unsworth, M. Principles of Environmental Physics, 4th ed.; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Frederick, J.R.; Camberato, J.J. Water and nitrogen effects on winter wheat in the southeastern Coastal Plain: II. Physiological responses. Agron. J. 1995, 87, 527–533. [Google Scholar] [CrossRef]
- Khan, E.A. Wheat response to application methods and levels of nitrogen fertilizer: I. Phenology, growth indices and protein content. Pak. J. Nutr. 2013, 12, 365–370. [Google Scholar]
- Ma, B.L.; Biswas, D.K.; Zhou, Q.P.; Ren, C.Z. Comparisons among cultivars of wheat, hulled and hulless oats: Effects of N fertilization on growth and yield. Can. J. Plant Sci. 2012, 92, 1213–1222. [Google Scholar] [CrossRef]
- Yue, X.; Hu, Y.; Zhang, H.; Schmidhalter, U. Evaluation of both SPAD reading and SPAD index on estimating the plant nitrogen status of winter wheat. Int. J. Plant Prod. 2019, 14. [Google Scholar] [CrossRef]
- Dunn, B.L.; Singh, H.; Goad, C. Relationship between chlorophyll meter readings and nitrogen in poinsettia leaves. J. Plant Nutr. 2018, 1–10. [Google Scholar] [CrossRef]
- Ravier, C.; Quemada, M.; Jeuffroy, M. Use of a chlorophyll meter to assess nitrogen nutrition index during the growth cycle in winter wheat. Field Crop. Res. 2017, 214, 73–82. [Google Scholar] [CrossRef]
- Le Bail, M.; Jeuffroy, M.; Bouchard, C.; Barbottin, A. Is it possible to forecast the grain quality and yield of different varieties of winter wheat from Minolta SPAD meter measurements? Eur. J. Agron. 2005, 23, 379–391. [Google Scholar] [CrossRef]
- Monostori, I.; Árendás, T.; Hoffman, B.; Galiba, G.; Gierczik, K.; Szira, F.; Vágújfalvi, A. Relationship between SPAD value and grain yield can be affected by cultivar, environment and soil nitrogen content in wheat. Euphytica 2016, 211, 103–112. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Meng, R.; Morrison, B.D.; McMahon, A.; Hantson, W.; Hayes, D.J.; Breen, A.L.; Salmon, V.G.; Serbin, S.P. A Multi-Sensor Unoccupied Aerial System Improves Characterization of Vegetation Composition and Canopy Properties in the Arctic Tundra. Remote Sens. 2020, 12, 2638. [Google Scholar] [CrossRef]
- Lv, Z.; Meng, R.; Man, J.; Zeng, L.; Wang, M.; Xu, B.; Gao, R.; Sun, R.; Zhao, F. Modeling of winter wheat fAPAR by integrating Unmanned Aircraft Vehicle-based optical, structural, and thermal measurement. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102407. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Growth Stage | Measurements |
|---|---|---|
| 24–20 March 2019 | Jointing | LAI*; Dry matter * |
| 20 March 2019 | Jointing | Chlorophyll # |
| 3 April 2019 | Flowering | Chlorophyll # |
| 6 April 2019 | Flowering | Canopy height # |
| 6–11 April 2019 | Flowering | LAI*; Dry matter * |
| 16 April 2019 | 13 days after Flowering | Chlorophyll # |
| 23 April 2019 | 20 days after Flowering | Chlorophyll # |
| 27 April–1 May 2019 | Maturity | LAI*; Dry matter * |
| 3 May 2019 | Maturity | Chlorophyll # |
| 14–18 May 2019 | Harvest | LAI*; Dry matter *; Final yield * |
| Date | Growth Stage | Images |
|---|---|---|
| 4 March 2019 | Elongation | RGB |
| 6 April 2019 | Flowering | RGB, thermal |
| 11 April 2019 | Flowering | RGB |
| 19 April 2019 | Grain-Filling | RGB |
| 8 May 2019 | Maturity | RGB |
| 14 May 2019 | Harvest | RGB |
| Spectral Indices | Include Blue Band? | Acronym | Definition | References |
|---|---|---|---|---|
| Green chromatic coordinate | No | GCC | G/(R + G + B) | / |
| Red chromatic coordinate | No | RCC | R/(R + G + B) | / |
| Bule chromatic coordinate | Yes | BCC | B/(R + G + B) | / |
| Green–red ratio index | No | GRRI | G/R | / |
| Green–blue ratio index | Yes | GBRI | G/B | / |
| Red–blue ratio index | Yes | RBRI | R/B | / |
| Green–red vegetation index | No | GRVI | (G−R)/(G + R) | [38] |
| Normalized difference index | No | NDI | (RCC−GCC)/(RCC + GCC + 0.01) | [39] |
| Woebbecke index | Yes | WI | (G − B)/(R − G) | [39] |
| Kawashima index | Yes | IKAW | (R − B)/(R + B) | [40] |
| Green leaf index | Yes | GLI | (2 × G − R − B)/(2 × G + R + B) | [41] |
| Visible atmospherically resistance index | No | VARI | (G − R)/(G + R − B) | [42] |
| Excess red vegetation index | No | EXR | 1.4 × RCC − GCC | [39] |
| Excess green vegetation index | Yes | EXG | 2 × GCC − RCC − BCC | [43] |
| Excess blue vegetation index | Yes | EXB | 1.4 × BCC − GCC | [44] |
| Principal component analysis index | Yes | IPCA | 0.994 × |R − B|+ 0.961 × |G − B|+ 0.914 × |G − R| | [45] |
| Color index of vegetation | Yes | CIVE | 0.441 × R − 0.881 + 0.385 × B + 18.78745 | [46] |
| VIs | Include Blue Band? | Observation Dates (2019) | Mean Value | |||||
|---|---|---|---|---|---|---|---|---|
| 0304 | 0406 | 0411 | 0419 | 0508 | 0514 | |||
| GCC | No | 0.72 | 0.87 | 0.45 | 0.43 | 0.74 | 0.15 | 0.56 |
| RCC | No | 0.77 | 0.80 | 0.94 | 0.78 | 0.75 | 0.00 | 0.67 |
| BCC | Yes | 0.00 | 0.27 | 0.88 | 0.58 | 0.08 | 0.04 | 0.31 |
| GRRI | No | 0.76 | 0.90 | 0.93 | 0.78 | 0.84 | 0.00 | 0.70 |
| GBRI | Yes | 0.41 | 0.57 | 0.74 | 0.30 | 0.13 | 0.09 | 0.37 |
| RBRI | Yes | 0.57 | 0.83 | 0.90 | 0.69 | 0.36 | 0.02 | 0.56 |
| GRVI | No | 0.76 | 0.90 | 0.92 | 0.78 | 0.85 | 0.00 | 0.70 |
| NDI | No | 0.76 | 0.90 | 0.92 | 0.78 | 0.85 | 0.00 | 0.70 |
| WI | Yes | 0.22 | 0.90 | 0.80 | 0.56 | 0.71 | 0.03 | 0.54 |
| IKAW | Yes | 0.10 | 0.84 | 0.92 | 0.72 | 0.71 | 0.02 | 0.55 |
| GLI | Yes | 0.72 | 0.26 | 0.44 | 0.43 | 0.74 | 0.16 | 0.46 |
| VARI | No | 0.78 | 0.88 | 0.92 | 0.78 | 0.85 | 0.00 | 0.70 |
| EXR | No | 0.78 | 0.90 | 0.92 | 0.78 | 0.84 | 0.00 | 0.70 |
| EXG | Yes | 0.72 | 0.26 | 0.45 | 0.43 | 0.74 | 0.15 | 0.46 |
| EXB | Yes | 0.48 | 0.63 | 0.72 | 0.26 | 0.74 | 0.08 | 0.48 |
| IPCA | Yes | 0.28 | 0.02 | 0.72 | 0.35 | 0.17 | 0.00 | 0.26 |
| CIVE | Yes | 0.55 | 0.52 | 0.45 | 0.05 | 0.62 | 0.01 | 0.36 |
| Mean value | 0.55 | 0.66 | 0.77 | 0.56 | 0.63 | 0.04 | 0.53 | |
| Observations | Observation Dates (2019) | ||
|---|---|---|---|
| 0406 | 0419 | 0514 | |
| Tcanopy | 0.66 | - | - |
| CVMH | 0.67 | 0.64 | 0.57 |
| GRVI | 0.90 | 0.78 | 0.00 |
| CSMGRVI | 0.85 | 0.77 | 0.00 |
| Observations | Observation Dates (2019) | ||||
|---|---|---|---|---|---|
| 0320 | 0403 | 0416 | 0423 | 0503 | |
| SPAD | 0.73 | 0.61 | 0.52 | 0.83 | 0.69 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, L.; Peng, G.; Meng, R.; Man, J.; Li, W.; Xu, B.; Lv, Z.; Sun, R. Wheat Yield Prediction Based on Unmanned Aerial Vehicles-Collected Red–Green–Blue Imagery. Remote Sens. 2021, 13, 2937. https://doi.org/10.3390/rs13152937
Zeng L, Peng G, Meng R, Man J, Li W, Xu B, Lv Z, Sun R. Wheat Yield Prediction Based on Unmanned Aerial Vehicles-Collected Red–Green–Blue Imagery. Remote Sensing. 2021; 13(15):2937. https://doi.org/10.3390/rs13152937
Chicago/Turabian StyleZeng, Linglin, Guozhang Peng, Ran Meng, Jianguo Man, Weibo Li, Binyuan Xu, Zhengang Lv, and Rui Sun. 2021. "Wheat Yield Prediction Based on Unmanned Aerial Vehicles-Collected Red–Green–Blue Imagery" Remote Sensing 13, no. 15: 2937. https://doi.org/10.3390/rs13152937
APA StyleZeng, L., Peng, G., Meng, R., Man, J., Li, W., Xu, B., Lv, Z., & Sun, R. (2021). Wheat Yield Prediction Based on Unmanned Aerial Vehicles-Collected Red–Green–Blue Imagery. Remote Sensing, 13(15), 2937. https://doi.org/10.3390/rs13152937