
Bearings-Only Target Tracking with an Unbiased Pseudo-Linear Kalman Filter



Abstract
:1. Introduction
Notations
2. Materials and Methods
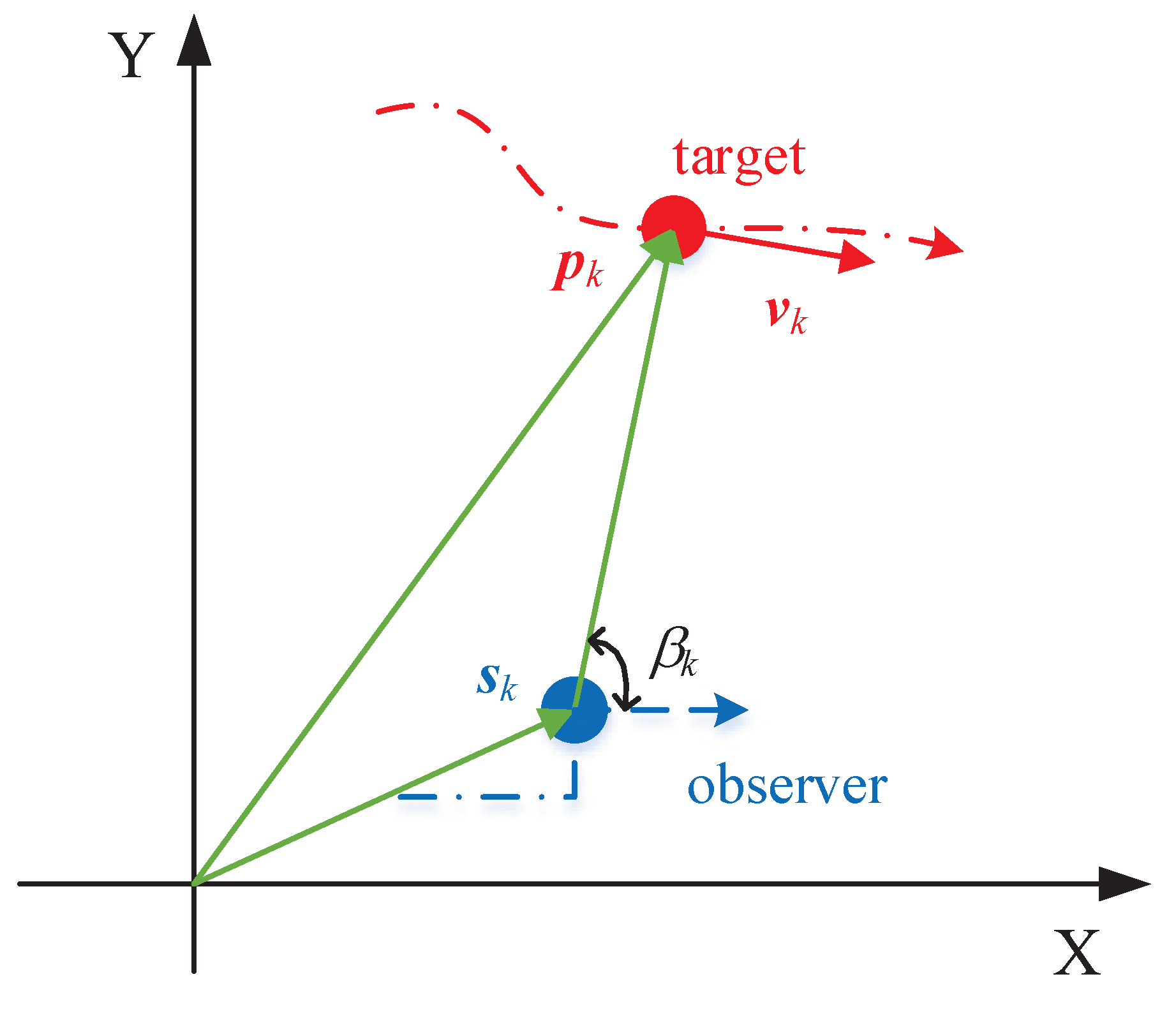
2.1. Problem Formulation
2.2. Overview of the PLKF, BC–PLKF, and IV–PLKF
2.2.1. PLKF
- step 1
- Predicting the state:
- step 2
- Predicting the covariance matrix:
- step 3
- Calculating the gain matrix:
- step 4
- Updating the state:
- step 5
- Updating the covariance matrix:where and denote, respectively, the one-step prediction and the corresponding prediction error covariance matrix, and denotes the Kalman gain, and and are, respectively, the posterior state estimate and corresponding estimation error covariance matrix. Since the true values of and are not available, the approximated values are used,
2.2.2. BC–PLKF
- step 1
- Predicting the state:
- step 2
- Predicting the covariance matrix:
- step 3
- Calculating the gain matrix:
- step 4
- Updating the state:
- step 5
- Updating the covariance matrix:
- step 6
- Bias compensation:
2.2.3. IV–PLKF
- step 1
- Predicting the state:
- step 2
- Predicting the covariance matrix:
- step 3
- Calculating the gain matrix:
- step 4
- Updating the state:
- step 5
- Updating the covariance matrix:
- step 6
- Bias compensation:
- step 7
- IV estimation:
2.3. The Proposed UB–PLKF and VC–PLKF
2.3.1. UB–PLKF
- step 1
- Predicting the state:
- step 2
- Predicting the covariance matrix:
- step 3
- Calculating the gain matrix:
- step 4
- Updating the state:
- step 5
- Updating the covariance matrix:
2.3.2. VC–PLKF
- step 1
- Predicting the state:
- step 2
- Predicting the covariance matrix:
- step 3
- Calculating the gain matrix for UB–PLKF:
- step 4
- Calculating the innovation:
- step 5
- Updating the state:
- step 6
- Updating the covariance for UB–PLKF:
- step 7
- Constructing the VC–PLKF:
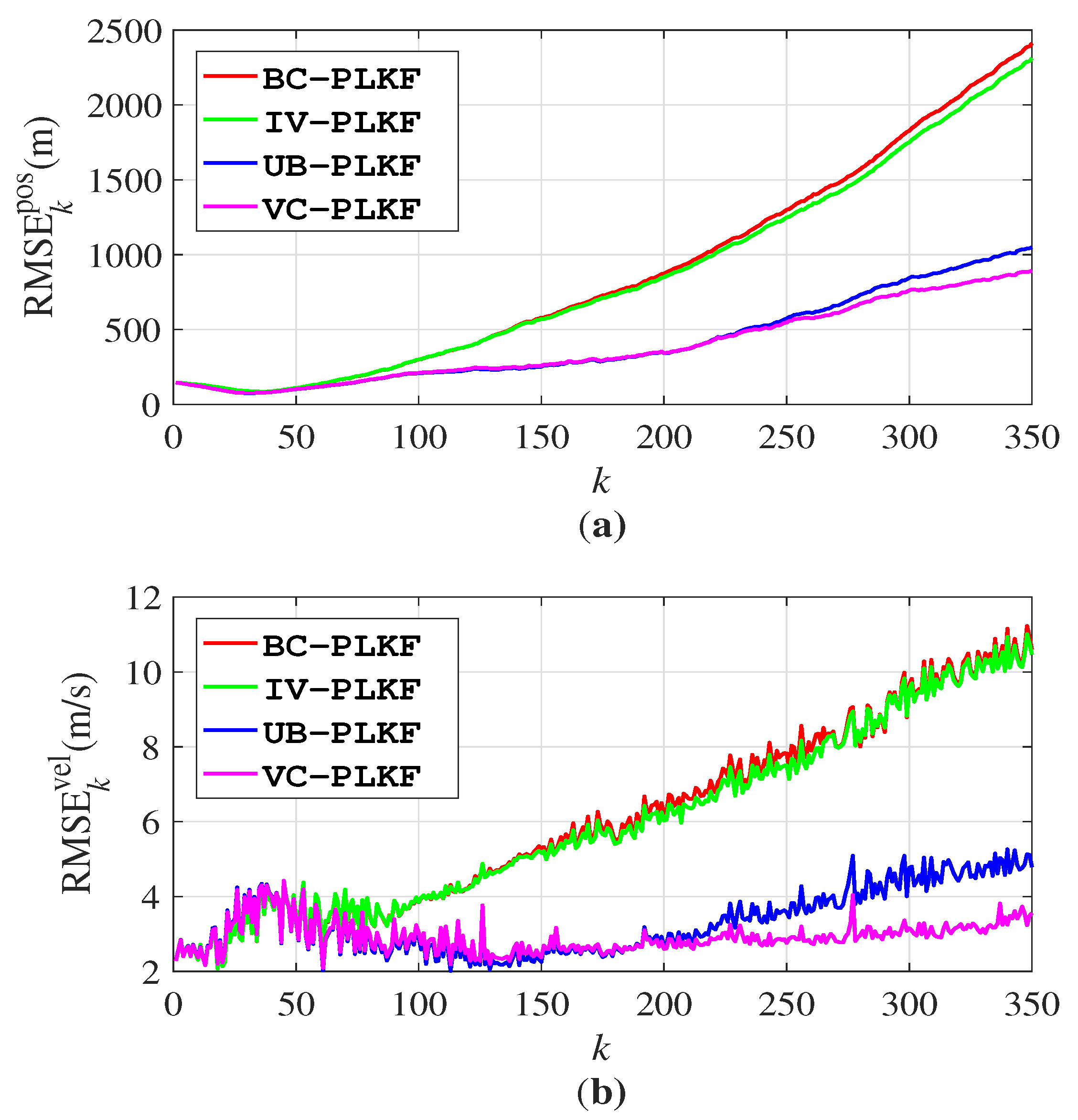
3. Results
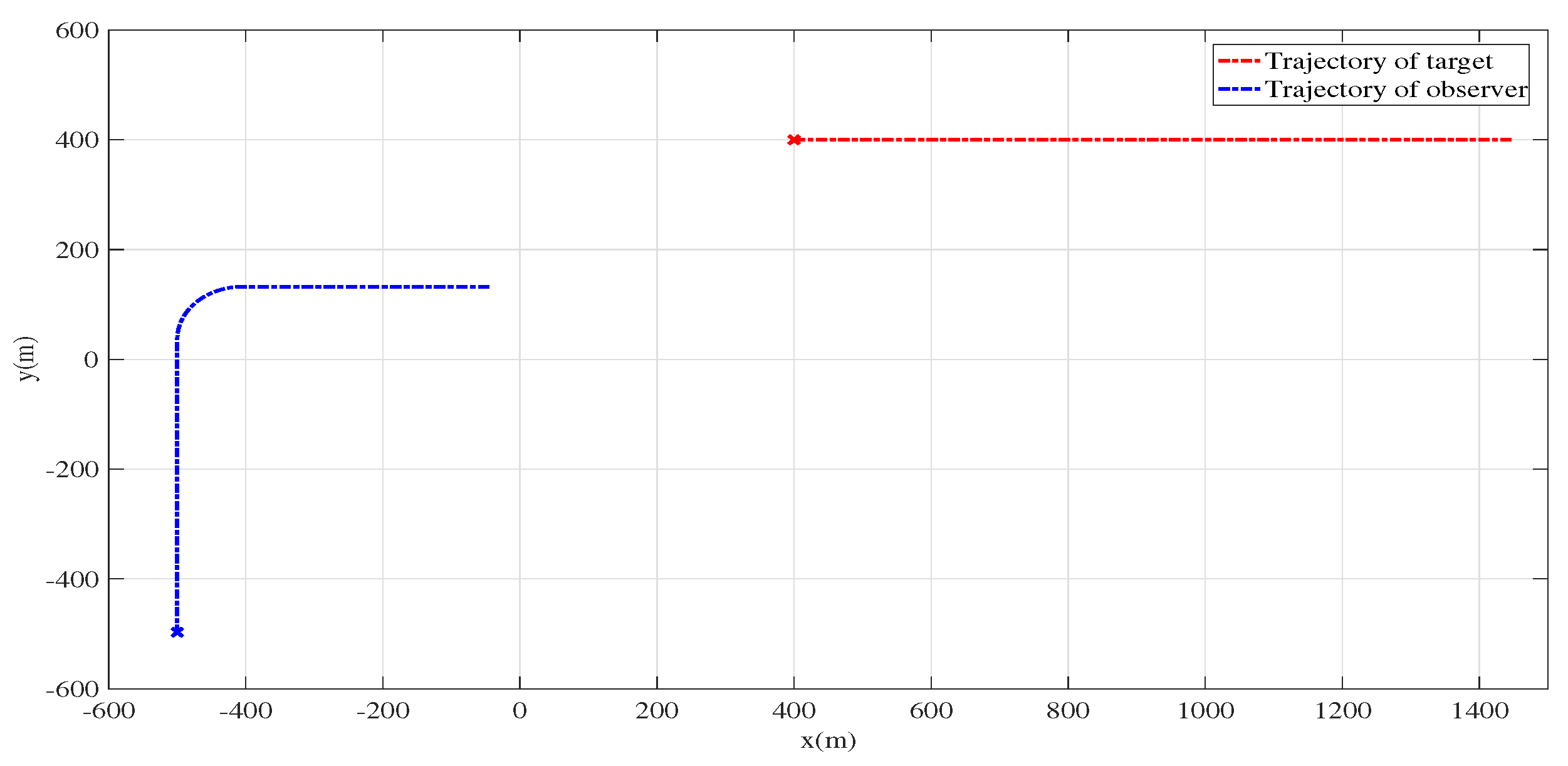
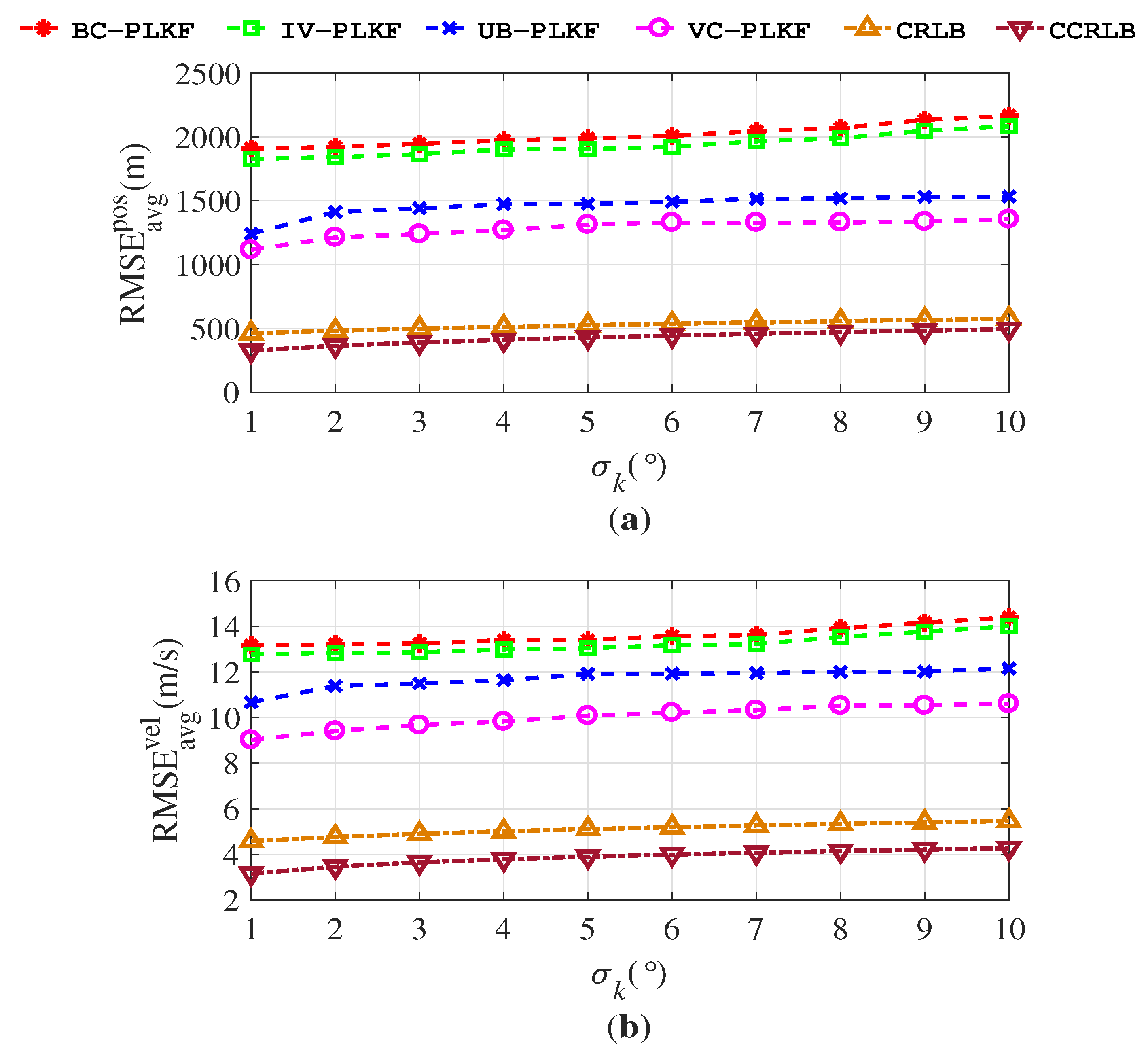
3.1. Scenario 1: Non-Manoeuvring Target Tracking
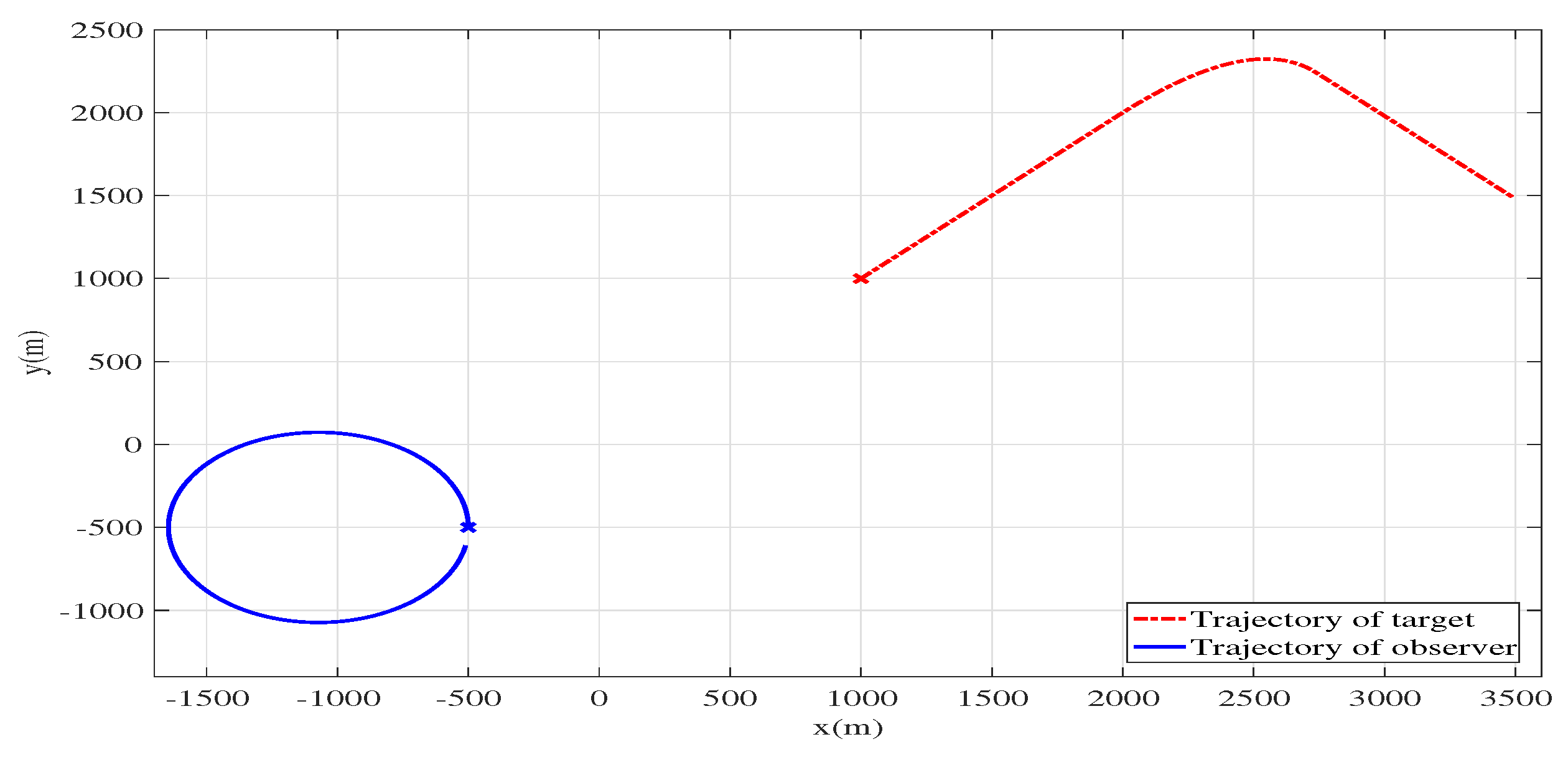
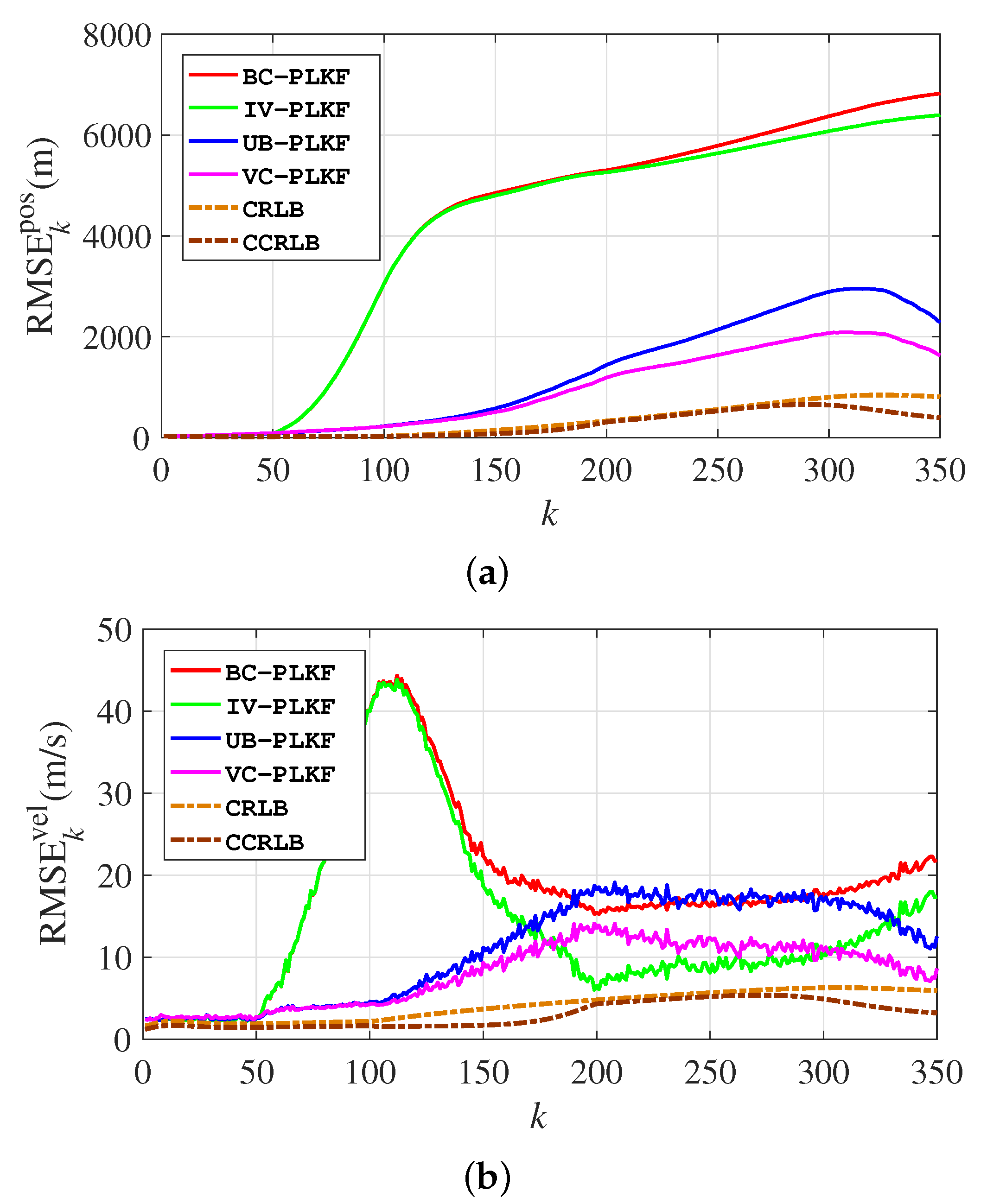
3.2. Scenario 2: Manoeuvring Target Tracking
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Lingren, A.G.; Gong, K.F. Position and Velocity Estimation Via Bearing Observations. IEEE Trans. Aerosp. Electron. Syst. 1978, AES-14, 564–577. [Google Scholar] [CrossRef]
- Nardone, S.; Lindgren, A.; Gong, K. Fundamental properties and performance of conventional bearings-only target motion analysis. IEEE Trans. Autom. Control 1984, 29, 775–787. [Google Scholar] [CrossRef]
- Jagan, B.O.L.; Rao, S.K. Underwater surveillance in non-Gaussian noisy environment. Meas. Control 2020, 53, 250–261. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Doğançay, K.; Hmam, H. 3D AOA target tracking using distributed sensors with multi-hop information sharing. Signal Process. 2018, 144, 192–200. [Google Scholar] [CrossRef]
- Su, J.; Li, Y.A.; Ali, W. Underwater angle-only tracking with propagation delay and time-offset between observers. Signal Process. 2020, 176, 107581. [Google Scholar] [CrossRef]
- Modalavalasa, N.; Rao, G.S.B.; Prasad, K.S.; Ganesh, L.; Kumar, M.N.V.S.S. A new method of target tracking by EKF using bearing and elevation measurements for underwater environment. Robot. Auton. Syst. 2015, 74, 221–228. [Google Scholar] [CrossRef]
- Liu, B.; Tang, X.; Tharmarasa, R.; Kirubarajan, T.; Jassemi, R.; Halle, S. Underwater Target Tracking in Uncertain Multipath Ocean Environments. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4899–4915. [Google Scholar] [CrossRef]
- Xu, S.; Doğançay, K.; Hmam, H. Distributed pseudolinear estimation and UAV path optimization for 3D AOA target tracking. Signal Process. 2017, 133, 64–78. [Google Scholar] [CrossRef]
- He, L.; Gong, P.; Zhang, X.; Wang, Z. The Bearing-Only Target localization via the Single UAV: Asymptotically Unbiased Closed-Form Solution and Path Planning. IEEE Access 2019, 7, 153592–153604. [Google Scholar] [CrossRef]
- Rutkowski, A.; Kawalec, A. Some of Problems of Direction Finding of Ground-Based Radars Using Monopulse Location System Installed on Unmanned Aerial Vehicle. Sensors 2018, 20, 5186. [Google Scholar] [CrossRef]
- Liao, S.L.; Zhu, R.M.; Wu, N.Q.; Shaikh, T.A.; Sharaf, M.; Mostafa, A.M. Path planning for moving target tracking by fixed-wing UAV. Def. Technol. 2019, 16, 811–824. [Google Scholar] [CrossRef]
- Pham, D.T. Some quick and efficient methods for bearing-only target motion analysis. IEEE Trans. Signal Process. 1993, 41, 2737–2751. [Google Scholar] [CrossRef]
- Aidala, V.; Hammel, S. Utilization of modified polar coordinates for bearings-only tracking. IEEE Trans. Autom. Control 1983, 28, 283–294. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Suh, T.; Ryu, J. Bearings-only target motion analysis of a highly manoeuvring target. IET Radar Sonar Navig. 2017, 11, 1011–1019. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Toloei, A.; Niazi, S. State Estimation for Target Tracking Problems with Nonlinear Kalman Filter Algorithms. Int. J. Comput. Appl. 2014, 98, 30–36. [Google Scholar] [CrossRef]
- Wu, H.; Chen, S.; Yang, B.; Chen, K. Robust Derivative-Free Cubature Kalman Filter for Bearings-Only Tracking. J. Guid. Control Dyn. 2016, 39, 1865–1870. [Google Scholar] [CrossRef]
- Ristic, B.; Houssineau, J.; Arulampalam, S. Robust target motion analysis using the possibility particle filter. IET Radar Sonar Navig. 2018, 13, 18–22. [Google Scholar] [CrossRef]
- Zhang, H.W.; Xie, W.X. Constrained auxiliary particle filtering for bearings-only maneuvering target tracking. J. Syst. Eng. Electron. 2019, 30, 684–695. [Google Scholar] [CrossRef] [Green Version]
- Ayham, Z.; Thomas, S.; Shannon, D.A. Optimal Shadowing Filter for a Positioning and Tracking Methodology with Limited Information. Sensors 2019, 19, 931. [Google Scholar] [CrossRef] [Green Version]
- Thomas, S.; Kevin, J. A guide to using shadowing filters for forecasting and state estimation. Physica D 2009, 238, 1260–1273. [Google Scholar] [CrossRef]
- Aidala, V.J. Kalman Filter Behavior in Bearings-Only Tracking Applications. IEEE Trans. Aerosp. Electron. Syst. 1979, AES-15, 29–39. [Google Scholar] [CrossRef]
- Lin, X.; Kirubarajan, T.; Bar-Shalom, Y.; Maskell, S. Comparison of EKF, pseudomeasurement, and particle filters for a bearing-only target tracking problem. In Proceedings of the Signal and Data Processing of Small Targets 2002, Orlando, FL, USA, 2–4 April 2002; International Society for Optics and Photonics: Bellingham, WA, USA, 2002; Volume 4728, pp. 240–250. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Improved Pseudolinear Kalman Filter Algorithms for Bearings-Only Target Tracking. IEEE Trans. Signal Process. 2017, 65, 6119–6134. [Google Scholar] [CrossRef]
- Zhang, Y.J.; Xu, G.Z. Bearings-Only Target Motion Analysis via Instrumental Variable Estimation. IEEE Trans. Signal Process. 2010, 58, 5523–5533. [Google Scholar] [CrossRef]
- Zanetti, R.; Majji, M.; Bishop, R.H.; Mortari, D. Norm-Constrained Kalman Filtering. J. Guid. Control Dyn. 2009, 32, 1458–1465. [Google Scholar] [CrossRef]
- Simon, D. Kalman filtering with state constraints: A survey of linear and nonlinear algorithms. IET Control Theory Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef] [Green Version]
- Badriasl, L.; Arulampalam, S.; van der Hoek, J.; Finn, A. Bayesian WIV Estimators for 3-D Bearings-Only TMA With Speed Constraints. IEEE Trans. Signal Process. 2019, 67, 3576–3591. [Google Scholar] [CrossRef]
- He, S.M.; Shin, H.S.; Tsourdos, A. Trajectory Optimization for Target Localization With Bearing-Only Measurement. IEEE Trans. Robot. 2019, 35, 653–668. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.G.; Lee, J.Y.; Kim, H.J. Look Angle Constrained Impact Angle Control Guidance Law for Homing Missiles With Bearings-Only Measurements. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 3096–3107. [Google Scholar] [CrossRef]
- Rong Li, X.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar] [CrossRef]
- Zanetti, R.; DeMars, K.J. Joseph Formulation of Unscented and Quadrature Filters with Application to Consider States. J. Guid. Control Dyn. 2013, 36, 1860–1864. [Google Scholar] [CrossRef] [Green Version]
- Schmitt, L.; Fichter, W. Globally Valid Posterior Cramer-Rao Bound for Three-Dimensional Bearings-Only Filtering. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2036–2044. [Google Scholar] [CrossRef]
- Nitzan, E.; Routtenberg, T.; Tabrikian, J. Cramer-Rao Bound for Constrained Parameter Estimation Using Lehmann-Unbiasedness. IEEE Trans. Signal Process. 2019, 67, 753–768. [Google Scholar] [CrossRef] [Green Version]
- Sarkka, S.; Nummenmaa, A. Recursive Noise Adaptive Kalman Filtering by Variational Bayesian Approximations. IEEE Trans. Autom. Control 2009, 3, 596–600. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|
| (m/s) | 21 | 19 | 17 | 16 |
| (m/s) | 1 | 3 | 5 | 7 |
| Algorithm | BC–PLKF | IV–PLKF | UB–PLKF | VC–PLKF |
|---|---|---|---|---|
| Runtime | 1.35 | 2.12 | 1 | 1.21 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Chen, S.; Hao, C.; Orlando, D. Bearings-Only Target Tracking with an Unbiased Pseudo-Linear Kalman Filter. Remote Sens. 2021, 13, 2915. https://doi.org/10.3390/rs13152915
Huang Z, Chen S, Hao C, Orlando D. Bearings-Only Target Tracking with an Unbiased Pseudo-Linear Kalman Filter. Remote Sensing. 2021; 13(15):2915. https://doi.org/10.3390/rs13152915
Chicago/Turabian StyleHuang, Zihao, Shijin Chen, Chengpeng Hao, and Danilo Orlando. 2021. "Bearings-Only Target Tracking with an Unbiased Pseudo-Linear Kalman Filter" Remote Sensing 13, no. 15: 2915. https://doi.org/10.3390/rs13152915
APA StyleHuang, Z., Chen, S., Hao, C., & Orlando, D. (2021). Bearings-Only Target Tracking with an Unbiased Pseudo-Linear Kalman Filter. Remote Sensing, 13(15), 2915. https://doi.org/10.3390/rs13152915