This section introduces the object-based hierarchical segmentation and morphological index and constructs the accuracy evaluation parameters and separability indexes. Hierarchical segmentation, knowledge classification rules, and accuracy evaluation were performed in eCognition Developer 9.1. Image preprocessing, sample collection, and feature statistics were conducted in ENVI 5.3. Morphological image processing was completed on MATLAB 2016b.
2.2.1. Feature Analysis and Selection
The construction waste in the study area mainly includes demolition construction waste, which is composed of roof waste and wall waste. The main components include bricks, sand, residual soil, asbestos tiles, and lime blocks. The composition of the demolition construction waste is complex, and it leads to complicated image features; this type of complexity is mainly manifested in blurred boundaries, irregular shapes, and disordered internal texture. Apparently, these properties caused the construction waste to be confused with surrounding ground objects, especially buildings and bare soil. Therefore, in this study, by comparing the differences of each feature, we try to find the optimal feature combination, which would be used to establish knowledge classification rules.
- (1)
Special Features
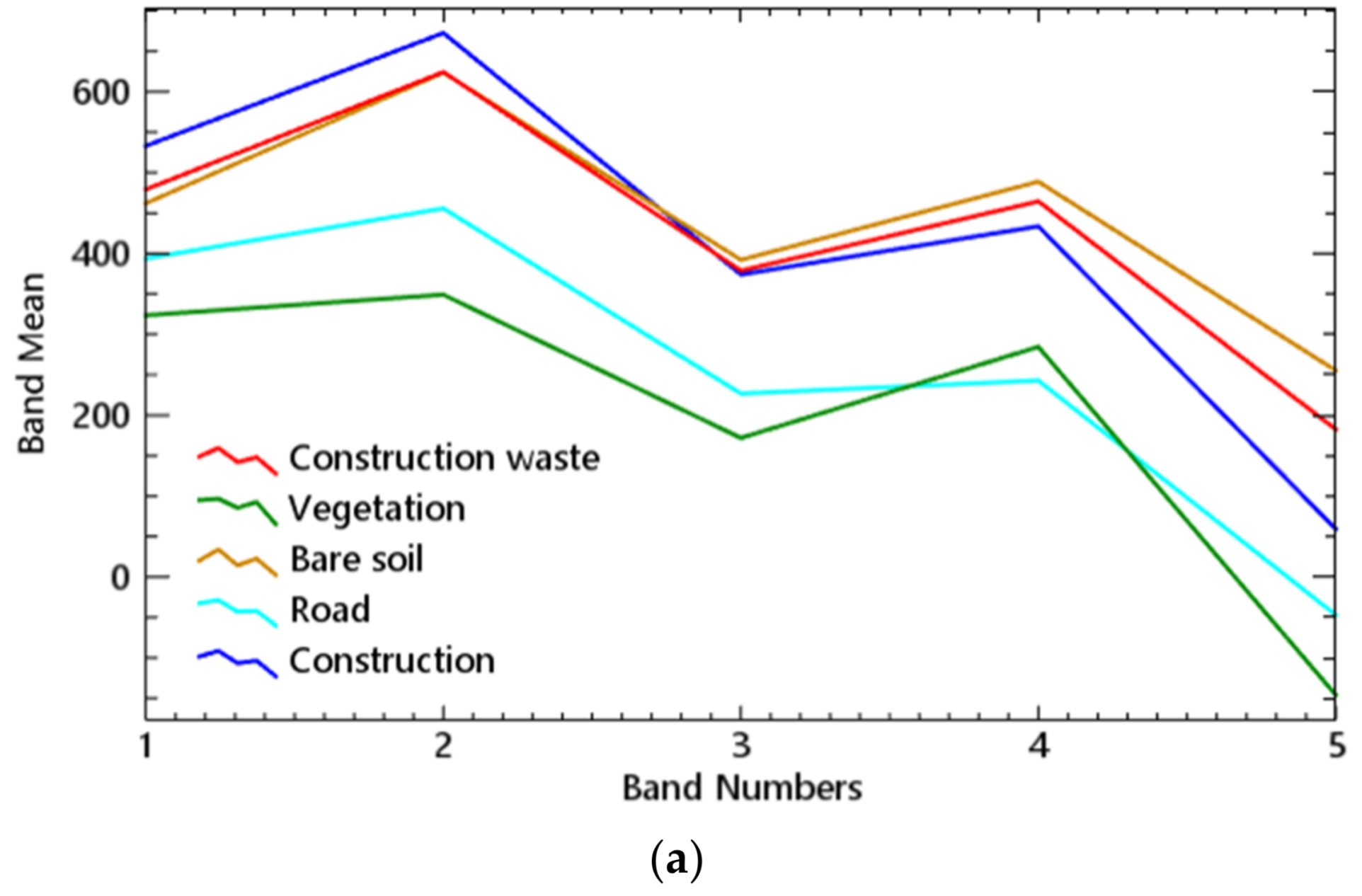
The spectral features of the construction waste are mainly related to the composition of the construction waste on the VHR remote sensing image. Different soil contents, wall, roof waste, and other components will exhibit different spectral features, which makes it more difficult to interpret the construction waste. Moreover, the surface features of the construction waste vary depending on the accumulation time. In this study, spectral mean analysis was performed on samples collected from construction waste and the surrounding ground objects in the study area, as shown in
Figure 3 and
Figure 4. The X-axis represents the image bands, which are blue, green, red, near-infrared bands, and single bands processed by the morphological index. The Y-axis represents the mean statistics of each band.
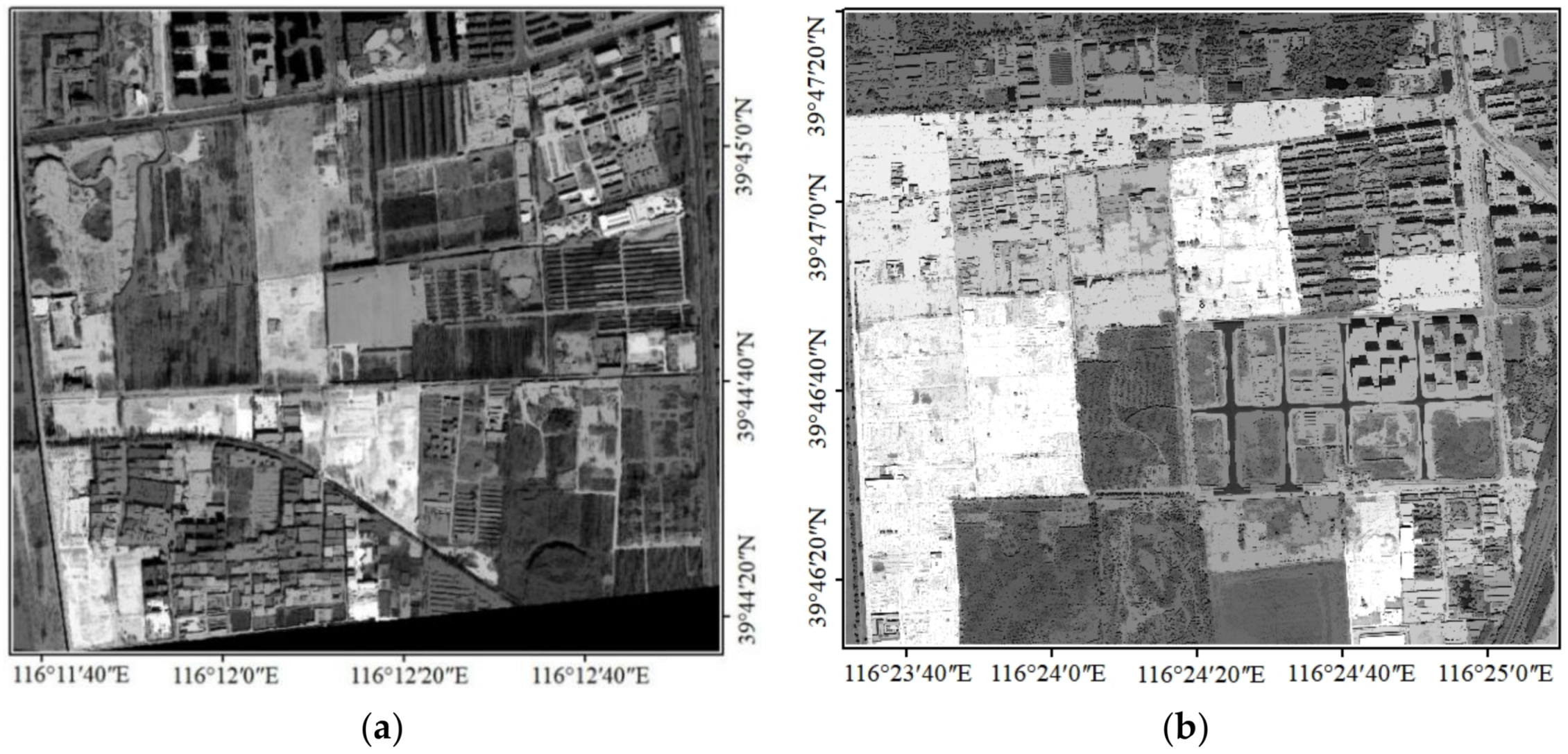
The distribution of the spectral mean value for these two study areas is obviously different, according to the different land cover types, image acquisition time and surface reflectance. However, the construction waste in these two areas is similar to the spectral mean values of the buildings and bare soil. In other words, there is a problem of confusion between the construction waste and other land features in both areas, when using only the spectral features to identify the construction waste area on the VHR remote sensing image.
In case A, vegetation and roads could significantly be separated from other land features on all of the bands, but construction waste, buildings, and bare soil are more closely distributed, especially in the third band, as shown in
Figure 3a. In other words, this type of distribution could lead to many commission classifications in the regular classification by spectral bands. It is worthwhile to note that the fifth band is the image processed by the morphological index, and construction waste, buildings and bare soil are obviously separated in terms of their spectral mean value in this band.
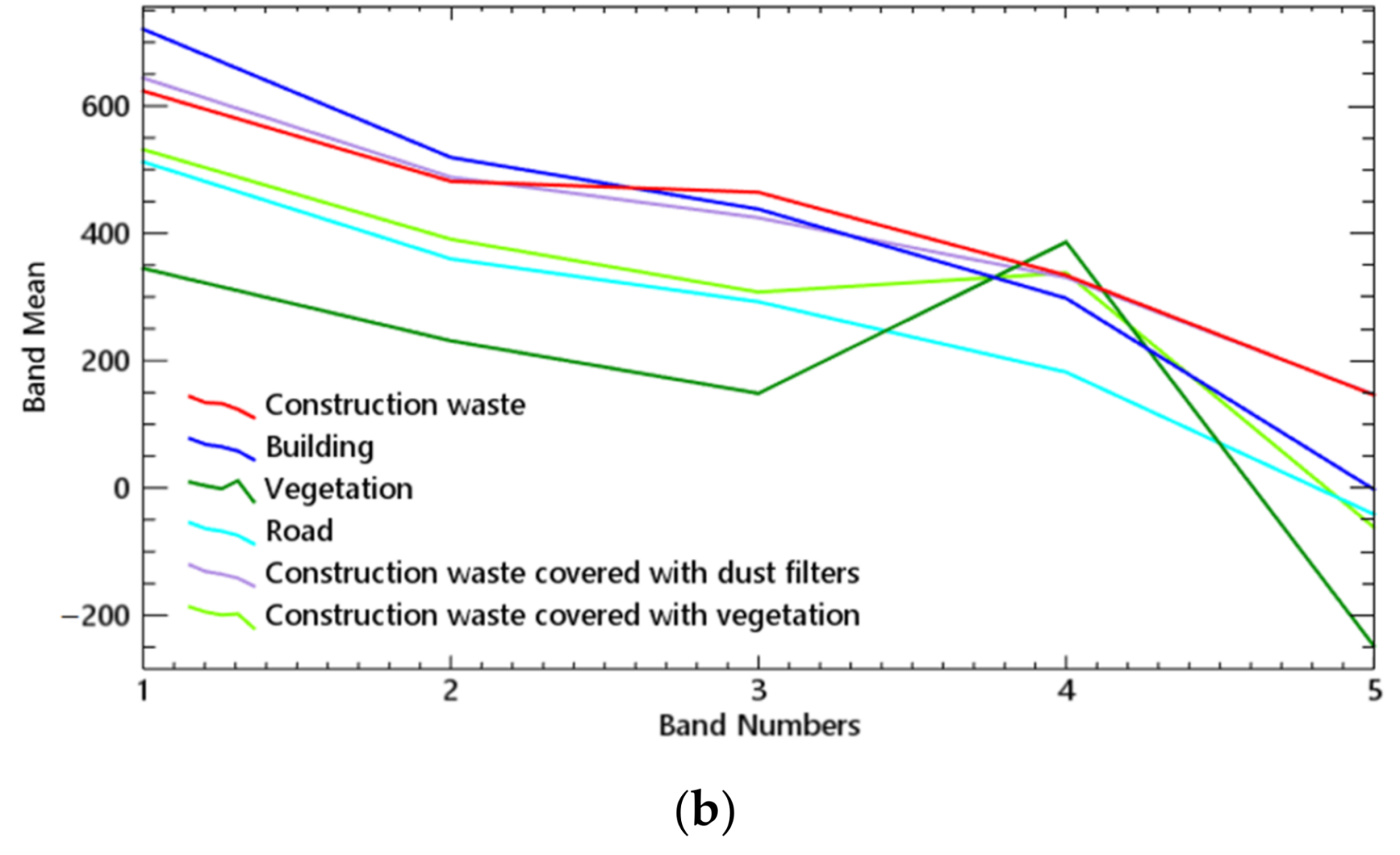
Different from case A, the construction waste area in case B has been covered by dust screen and vegetation, as shown in
Figure 3b, and the spectral distribution of the construction waste covered by dust screen and the exposed construction waste are relatively close, while the spectral distribution of the construction waste covered by vegetation and vegetation are also close. That means that it is difficult to identify the construction waste area when it has been covered by vegetation and; thus, the dust screen coverage has no particularly significant impact on the identification and extraction of the construction waste area using spectral features on a VHR remote sensing image, but vegetation does.
Considering the vegetation and bare soil with vegetation after the re-segmentation of the second layer, we applied the normalized differential vegetation index (NDVI) [
28] to separate those ground objects according to the reflection feature differences of the vegetation in the near infrared band and the red band.
where Band 3 is the spectral mean value of the image objects in the red band, and Band 4 is the spectral mean value of the image objects in the NIR band.
In this article, the third band and the fifth band were used for threshold classification to separate the vegetation, roads, and some buildings as non-construction waste. The larger the value of the vertical axis is, the more concentrated the distribution of the gray values of the ground objects that correspond to the horizontal axis. For example, in Case A, the red circle in
Figure 4a shows the junction of the vegetation road and the construction waste, and the approximate distribution range of the separated vegetation, road and other ground objects is 250~350 in
Figure 4b. Finally, the optimal threshold value could be determined through multiple experiments.
- (2)
Geometric Features
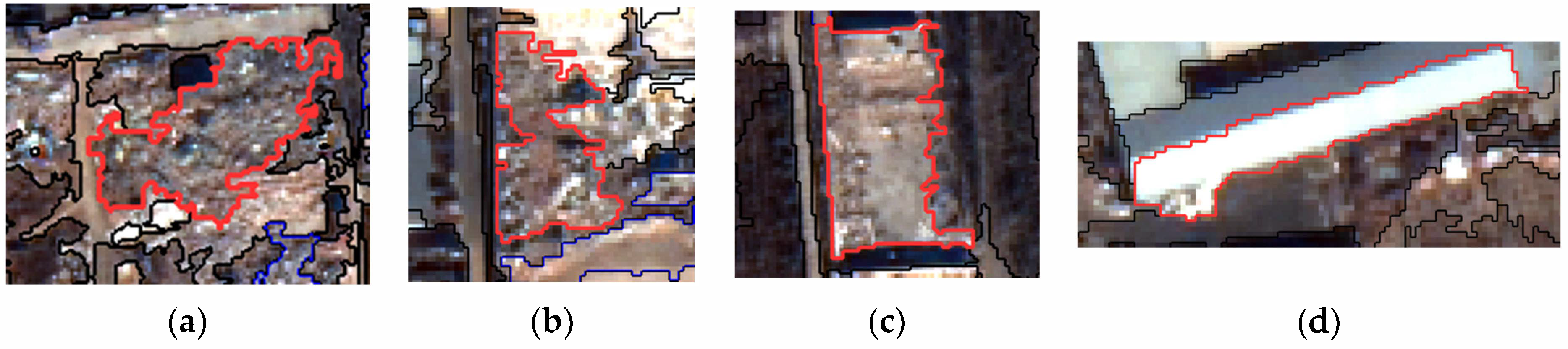
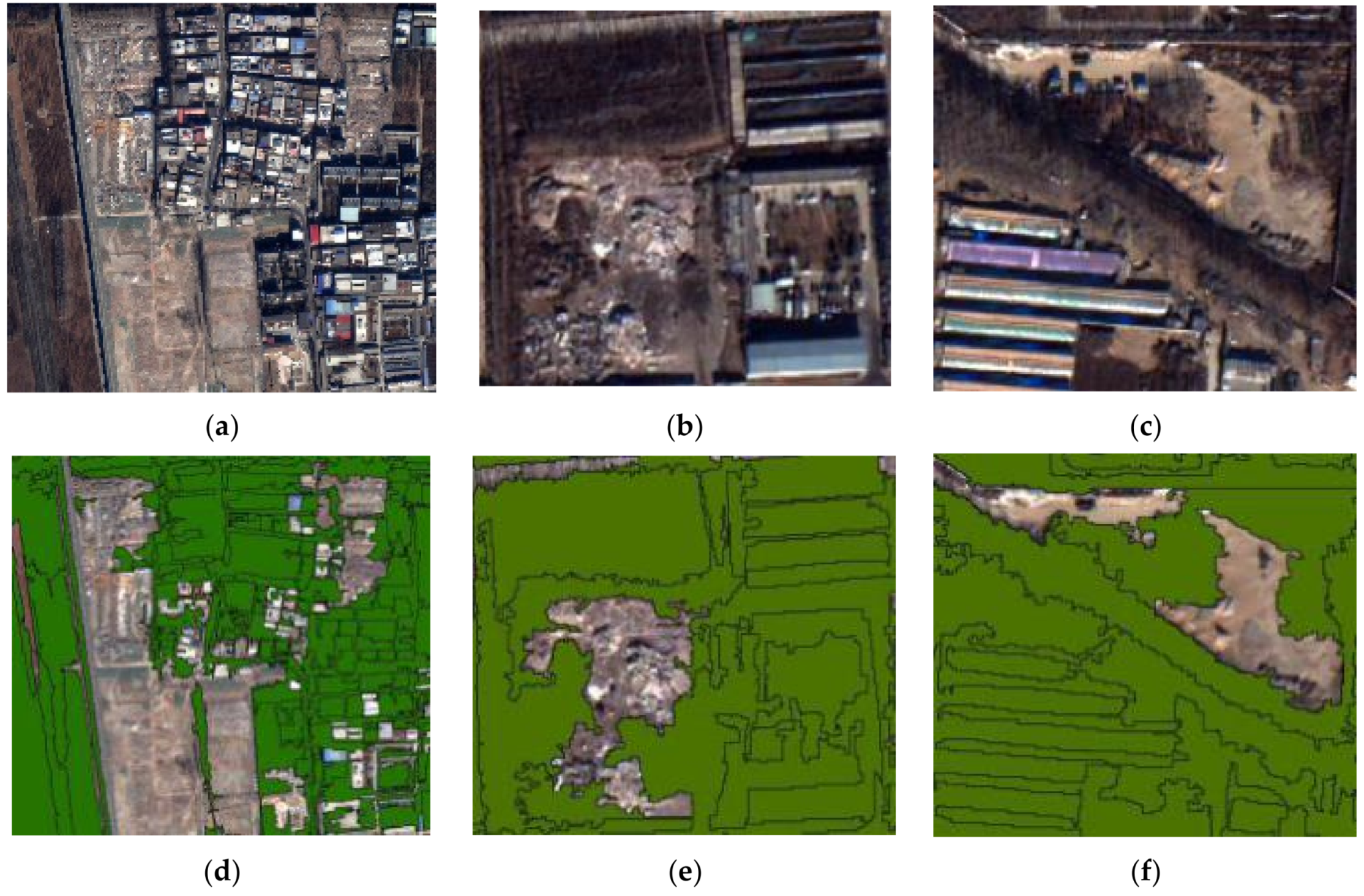
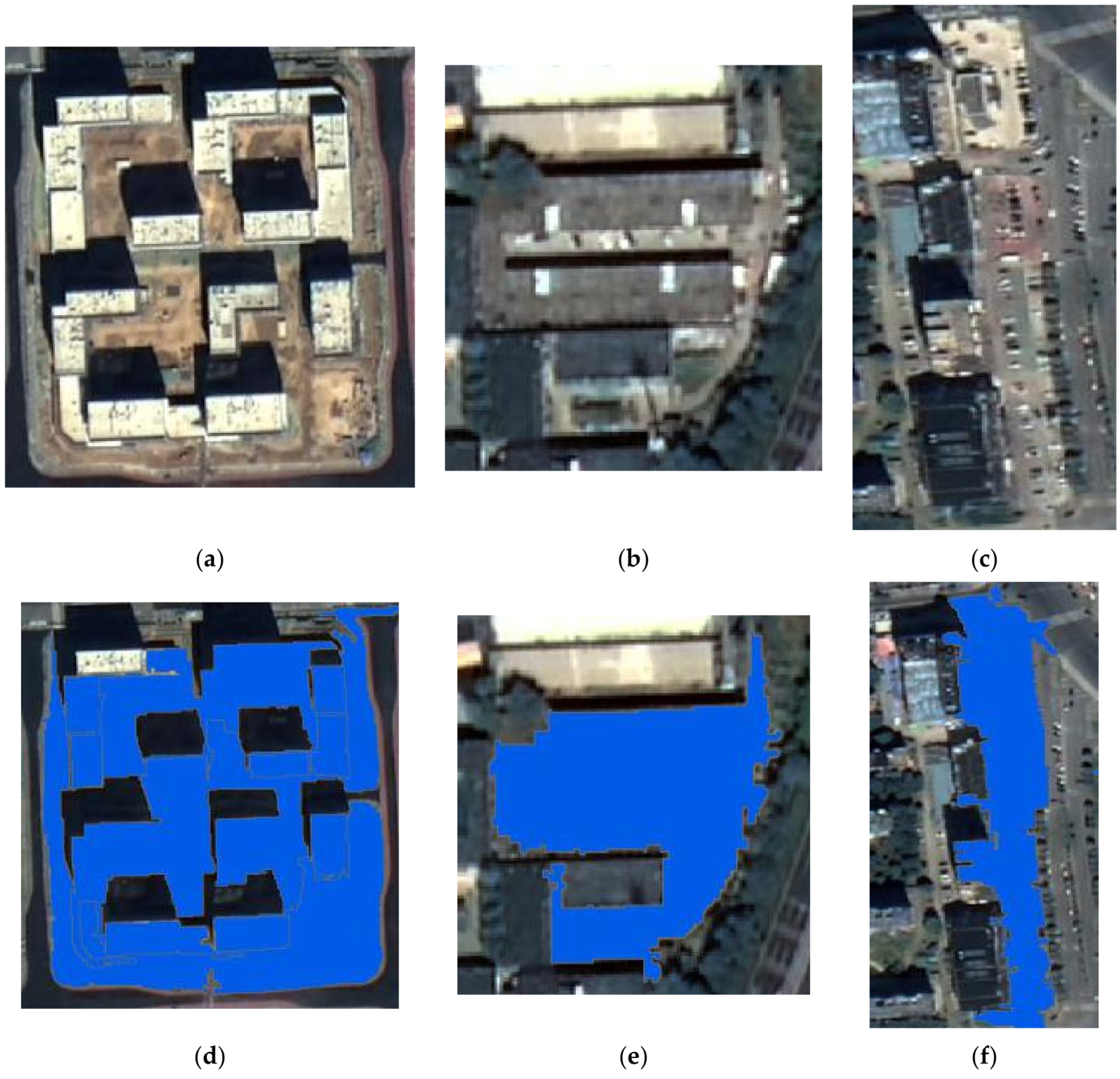
There are always many artificial ground objects around construction waste, such as buildings, farmlands, and roads, and they usually have regular shapes, while the geometry of construction waste is usually irregular (
Figure 5a,b); as a result, we can use a rectangle function to discriminate the construction waste from the other surroundings. Sometimes; however, the boundary of the construction waste accumulation is similar to the boundary of the original building (
Figure 5c,d). Thus, we need to use more geometric features to distinguish between buildings and construction waste, not only a rectangle function.
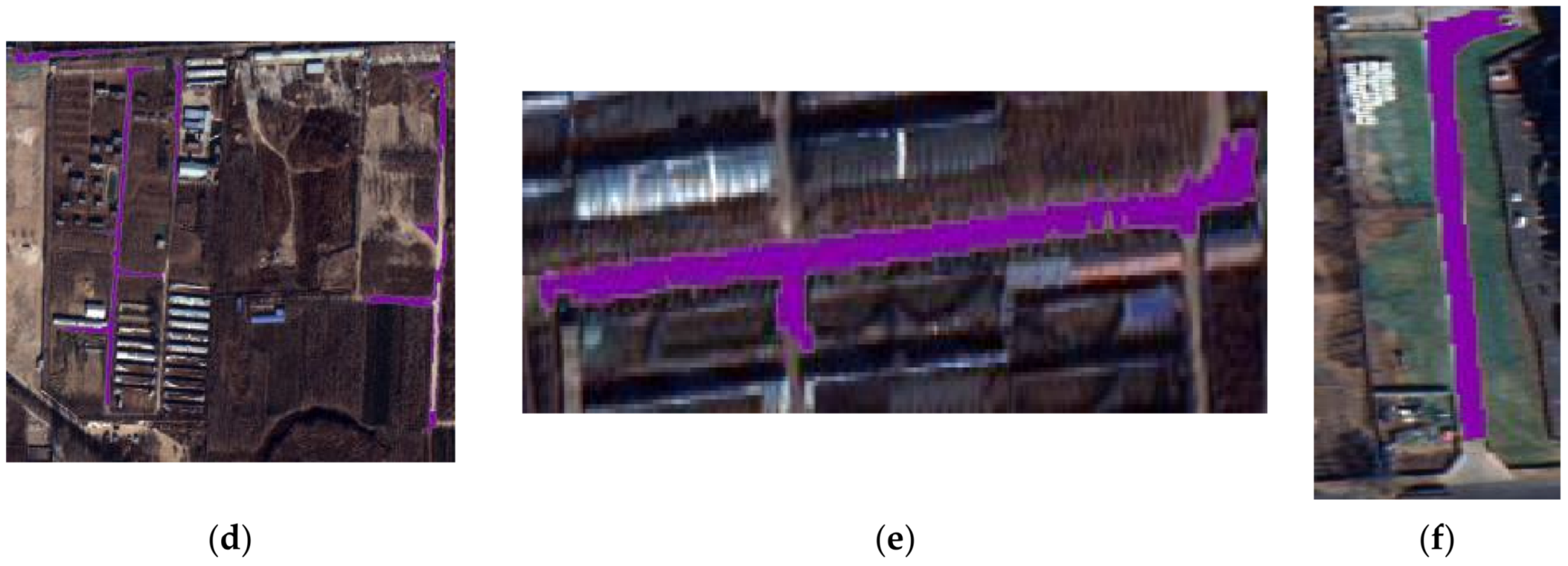
Roads always have some obvious linear features (
Figure 6a) and low compactness (
Figure 6b,c), which are significantly different from the geometric features of construction waste. According to this type of difference, we prefer to use the ratio of the length to width and polygon compactness to discriminate construction waste from roads.
The ratio of the length to the width is a common linear index parameter [
29], which is used to identify image objects with linear characteristics such as roads.
where
Length is the length of the image object, and
Width is the width of the image object.
The compactness (polygon) is the ratio of the area of a polygon to the area of a circle with the same perimeter, which is used to separate image objects with low compactness, such as rural roads, due to the large number of serrated teeth caused by segmentation.
where Area represents the area of the polygon object, and Perimeter represents the perimeter of a polygon object.
Since image segmentation objects will have small areas of patches, we divided such objects into non-construction waste by setting an area threshold.
where
Pv represents the number of pixels contained in the image object, and
u represents the pixel size of the coordinate system units.
- (3)
Texture Features
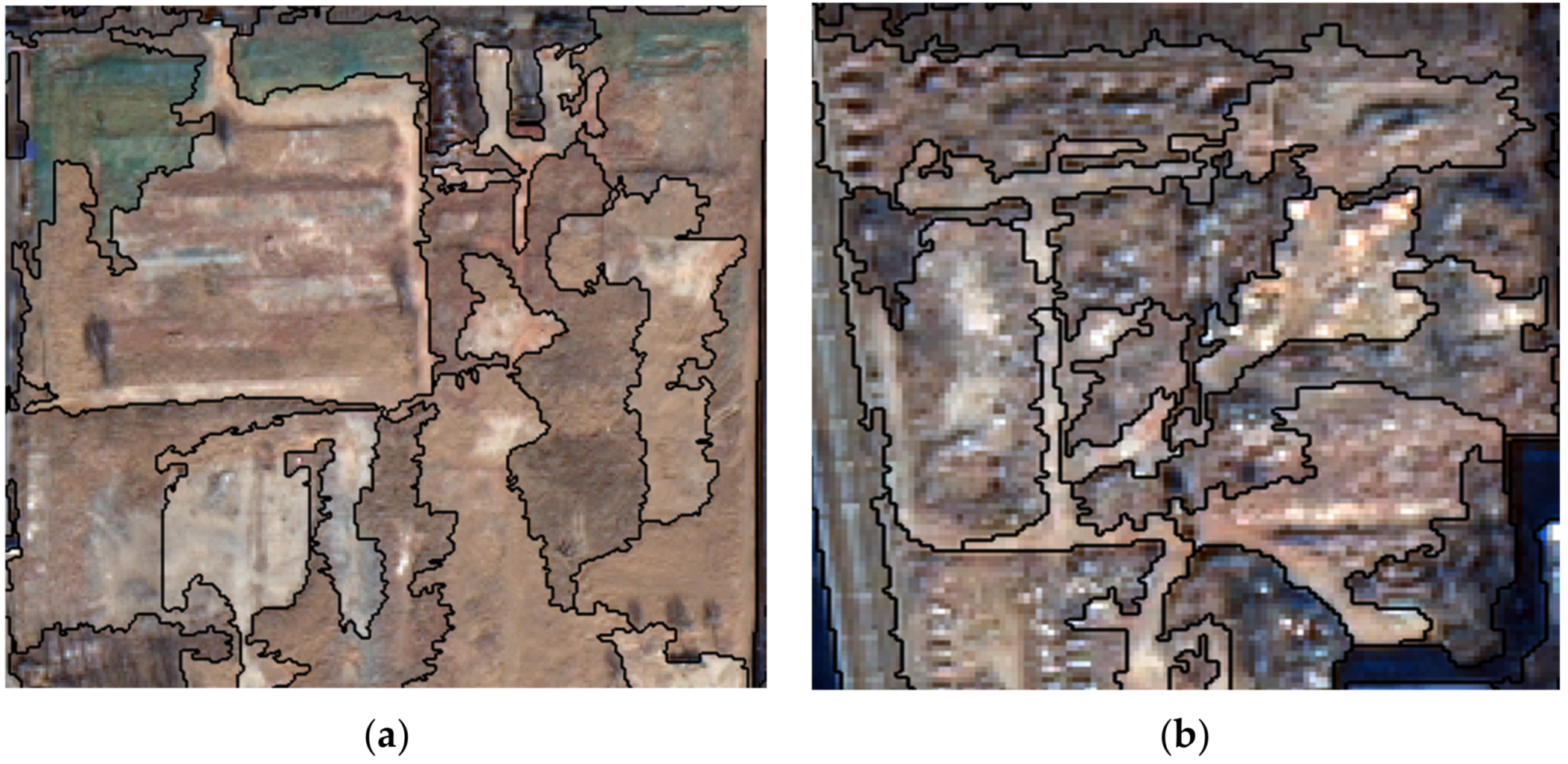
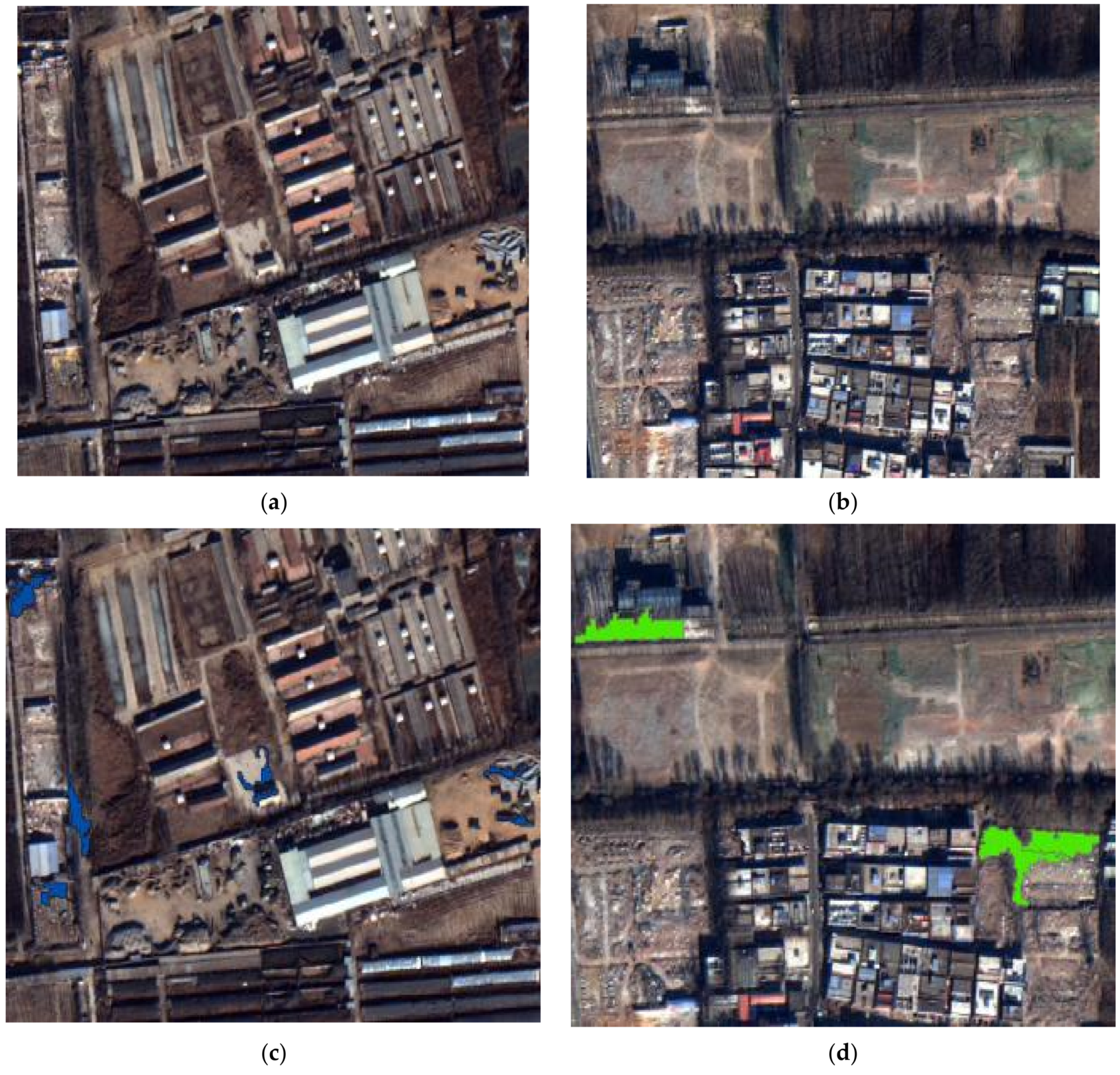
According to the field survey, we found that the differences in the image texture characteristics between construction waste and other surrounding objects are obvious in the study area (
Figure 7). We used the gray level co-occurrence matrix (GLCM) [
30] to obtain the texture features of the image objects.
where
d is the distance,
θ is the direction, and
i and
j represent the row and column numbers, respectively.
A series of statistics to describe the texture of the image object could be calculated by GLCM [
31]. Homogeneity reflects the partial texture change of the image, and it can well characterize the partial texture features of the image [
31]. The value range is [0, 1], as shown in Equation (6). For bare soil that is confused with the spectral features of the construction waste but has obvious differences in internal texture features (
Figure 7), we used homogeneity to separate it into the non-construction waste.
The demolished buildings and some urban buildings cannot be completely separated by spectral and geometric features, but their features are obvious differences from the adjacent image objects.
GLCM describes the texture by measuring the spatial correlation features of the spectrum on the image [
32]. The standard deviation is one of its statistics, which is different from the simple standard deviation of the grayscale in the image. It mainly addresses the combination of a reference pixel and adjacent pixel, and it measures the dispersion degree of the mean, as shown in Equation (7). The standard deviation is mainly used to separate the image objects that are easily confused with the construction waste in the vicinity of the vegetation and shadows in the study area.
The contrast reflects the sharpness of the image and the depth of the groove of the texture [
33]. The deeper the groove is, the greater the contrast, and the clearer the effect. On the other hand, when the contrast is small, the groove grain is shallow, and the effect is fuzzy. We used the contrast eigenfunctions to separate the confusing image objects, such as buildings near the construction waste accumulation area.
- (4)
Morphological Features
Most of the buildings around construction waste are in the process of demolition, and they do not have the regular geometric shape and texture features of undemolished buildings. Moreover, the spectral features of buildings and building waste during demolition are similar. As a result, it is difficult to separate the buildings from a demolition area because of this redundant and interfering information. In consequence, we use mathematical morphological image processing to highlight the characteristics of the buildings and to increase the differences between the construction waste and the buildings. The application of mathematical morphology in image processing can simplify image data, maintain the basic shape features of the target in the image, and eliminate any irrelevant noise structure [
34]. There are four basic operations of mathematical morphology: dilation, erosion, opening, and closing. These basic operations are based on mathematical morphology and can also be deduced and combined into various practical algorithms for mathematical morphology, such as the top-hat transformation, bot-hat transformation, opening by reconstruction, closing by reconstruction, and so on [
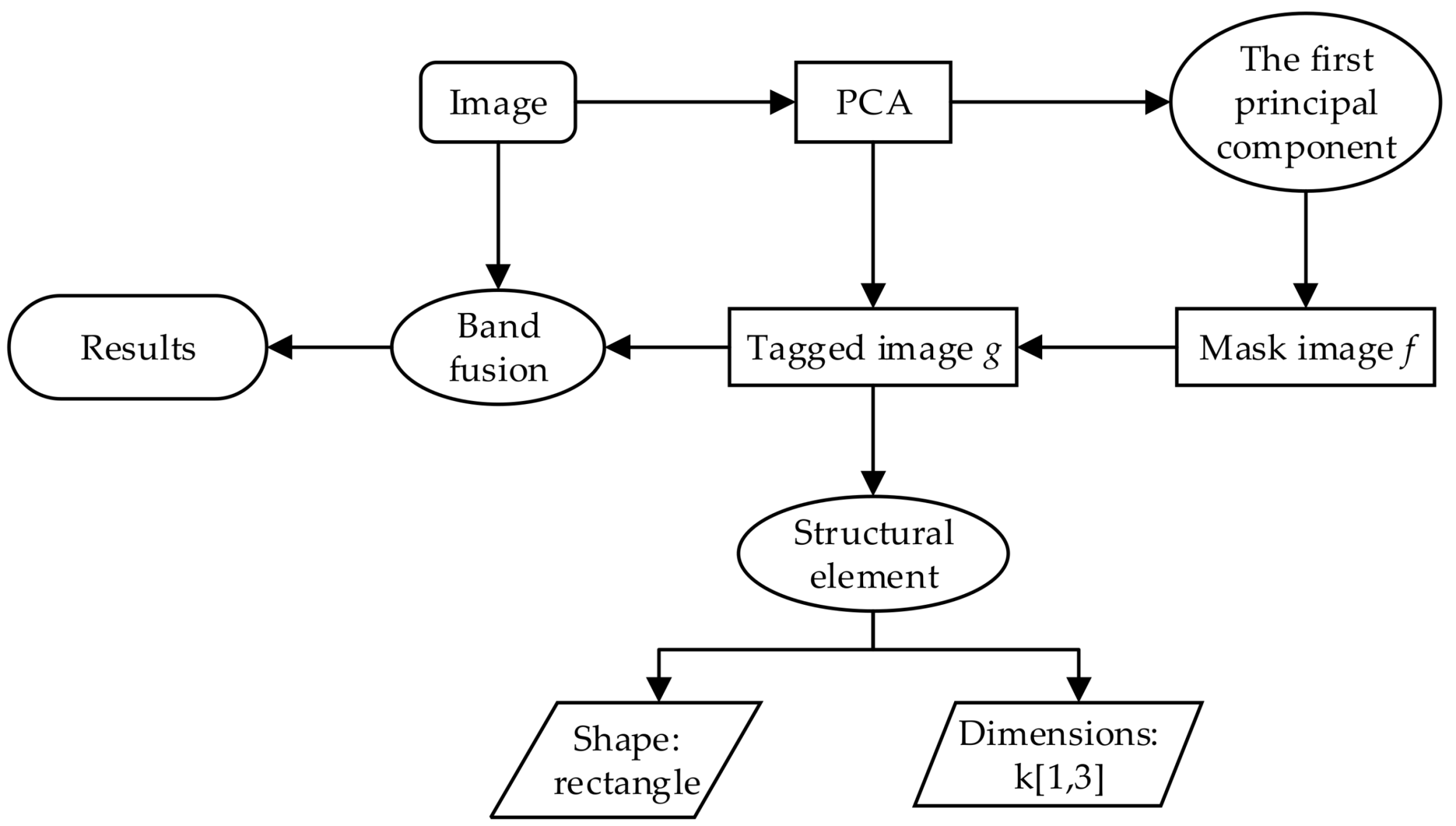
35]. The morphological reconstruction algorithm is the basis of many effective image transformation algorithms. Due to the constraints of the mask image, it solves the shortcoming that the traditional opening operation is highly dependent on accurate structural elements to correctly restore the shape. Moreover, due to its own nature, open reconstruction not only removes all of the parts that are corroded by structural elements but also spreads only at the highest level suitable for structural elements, in such a way that the contrast of bright image objects can be reduced to a certain extent. In this article, we used the opening by reconstruction algorithm to smooth the image and removed all objects that were smaller than structuring elements.
Therefore, the use of morphology not only provides morphological features for identification but also helps the higher reflectivity of construction waste to form high spatial contrast with adjacent buildings, which provides a method for the successful separation of construction waste from buildings.
Opening by reconstruction is an algebraic opening operation [
36]. The realization of morphological reconstruction requires two elements: the mask image
f and the mark image
g. The basic idea is to use the marked image
g to iteratively process the mask image
f. When the propagation of the marked image is hindered by the mask image, the iteration is stabilized, and the algorithm is automated. In other words, image
f is reconstructed with size
n.The structuring element
b is defined to erode the input image to obtain the marker image
g, and then, the original image is used as the mask image
f to reconstruct the marker image g. The opening by reconstruction of image
f at scale
n is defined as the reconstruction of the
f erosion at scale
n. The opening by reconstruction of image
f at scale
n is defined as the erosion reconstruction of
f at scale
n.
where
i is the number of cycles when
,
is the dilation reconstruction of image
g to image
f, and
is the erosion operation of mask image
f based on the structuring element
b.
Firstly, we used the principal component analysis to transform the original image, and we used the first principal component as the mask image f. Thus, we could obtain the marked image g by corroding the mask image f. Then, according to the geometric characteristics of the buildings in the study area, we used the open reconstruction operations of different scales and shapes on the marked image g, under the restriction of the mask image f, and the scales and shapes were defined by the structuring element b. Finally, we selected the optimal shape and scale to reconstruct the image as the result of the morphological index processing, and we fused the result with the original image to obtain an image with five bands, as the input data for the image segmentation and classification.
Based on the above ideas, we used the basic morphological operations in study area A to compare the effect with the reconstruction operation, as shown in
Figure 8,
Figure 9,
Figure 10 and
Figure 11.
2.2.3. Accuracy Evaluation of the Construction Waste Identification
Firstly, we used the confounding matrix method to evaluate the accuracy of the construction waste identification and extraction. Moreover, we defined the judging conditions for the separability of the construction waste, and we proposed a set of construction waste separability evaluation quality indexes to evaluate the reliability of the classification model in this paper.
- (1)
Confusion Matrix
We randomly selected from a few samples and used the evaluation model to test the accuracy of the classification results, combined with the same period of ground truth data. The following evaluation factors, including the overall accuracy, Kappa coefficient, producer accuracy, and user accuracy, are obtained based on the calculation of the confusion matrix [
39].
The confusion matrix can intuitively show the confounding ratio among the different types [
40], which has two dimensions, including the true value and the predicted value, as show in
Table 1. Each column of the confounding matrix represents the prediction category, and the total number of each column represents the number of predicted categories. Each row represents the true category of the data, and the total number of rows represents the true number of classes.
The overall accuracy (
OA) is equal to the number of correctly classified objects divided by the total number of objects. The number of correctly classified objects is distributed along the diagonal of the confusion matrix, and the total is equal to the total number of objects of all of the real reference data. We used the overall accuracy to measure the total experimental result accuracy. The Kappa coefficient (
Kappa), which uses the information in the whole error matrix, can reflect the overall classification accuracy [
41]. The Kappa coefficient is between −1 and 1, and a higher Kappa value indicates higher classification accuracy. The producer accuracy (PA) is the ratio of the number of objects correctly classified as class
i (diagonal values) to the total number of true references in class
i (the sum of columns
i in the confusion matrix). Corresponding to PA is the omission error, in other words, omission error = 1 −
PA. The user accuracy (UA) refers to the ratio between the number of objects correctly classified into class
i (diagonal value) and the total number of objects classified into class
i (the sum of the rows of class
i in the confusion matrix). The commission error corresponds to the UA, in other words, the commission error = 1 −
UA.
where
i represents the sample of class
i,
n represents the number of categories,
N represents the total number of objects (which refers to the test samples),
represents the diagonal elements of the error matrix,
represents the column sum of category
i, and
is the row sum of category
i.
- (2)
Construction Waste Separability Quality Evaluation Index
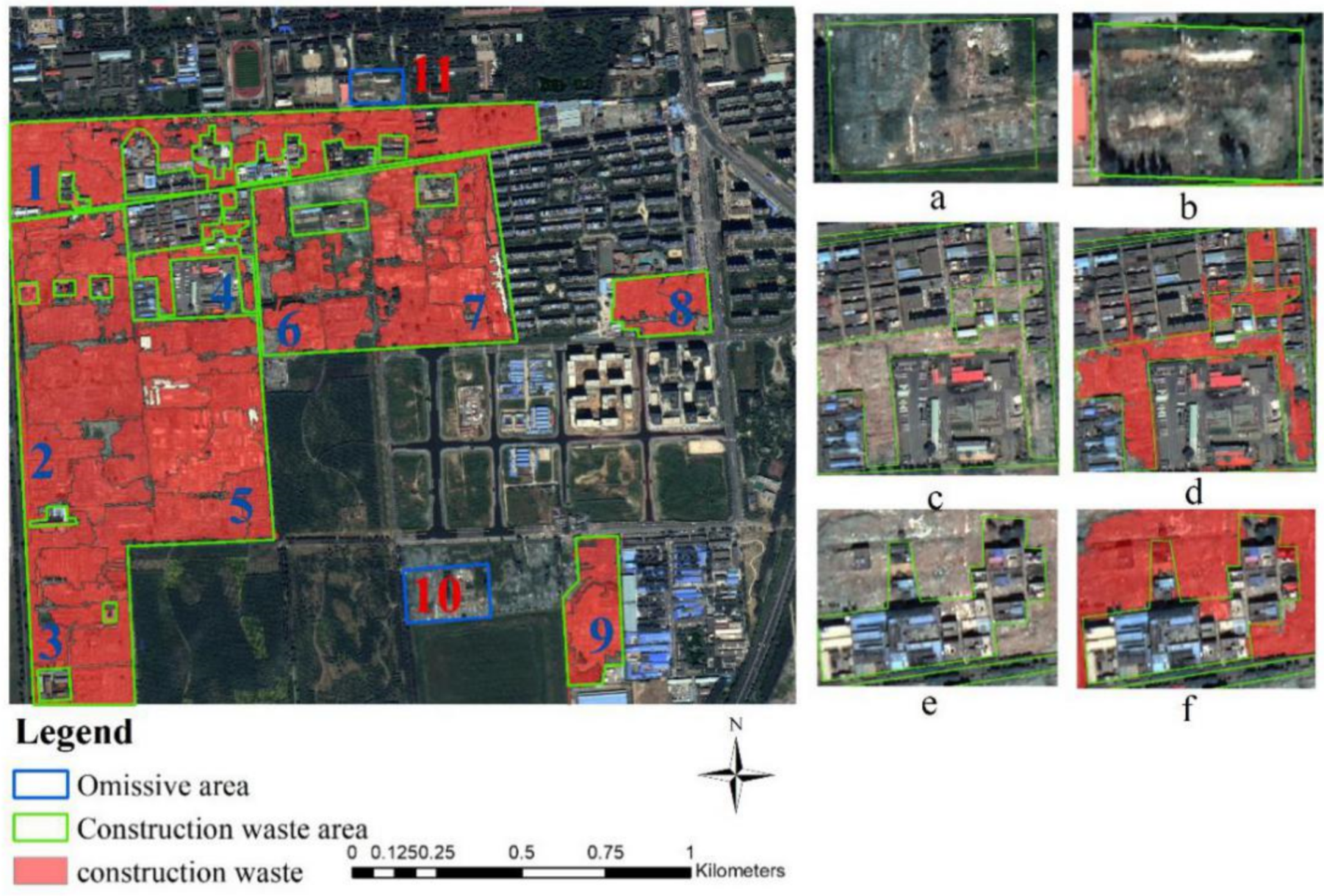
Since the construction waste is characterized by unclear edges, there is uncertainty in the extraction accuracy and separability of the construction waste measured by area, which will bring incalculable errors. However, the spatial distribution of the construction waste is visual and predictable. Therefore, we compared the spatial distribution and location of the construction waste with the classification results to evaluate the reliability of the experimental results.
We used the GPS data collected outdoors and the construction waste accumulation points obtained by visual interpretation as reference data to determine the storage location and approximate range of the construction waste.
The separability condition is the following:
- (1)
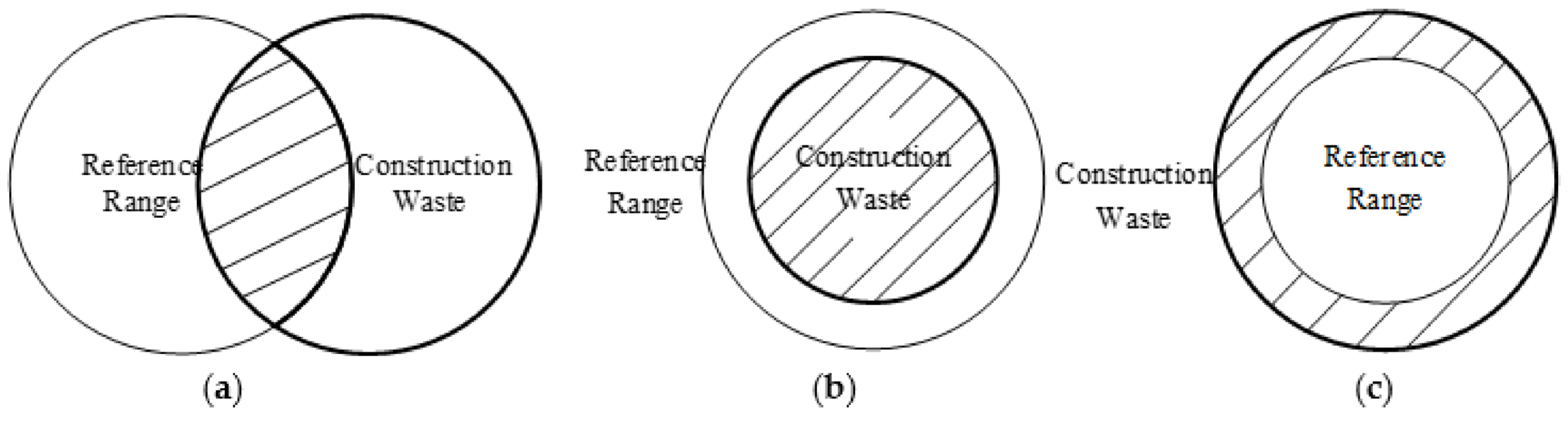
The identified construction waste object has an intersection or inclusion relationship with the reference range.
- (2)
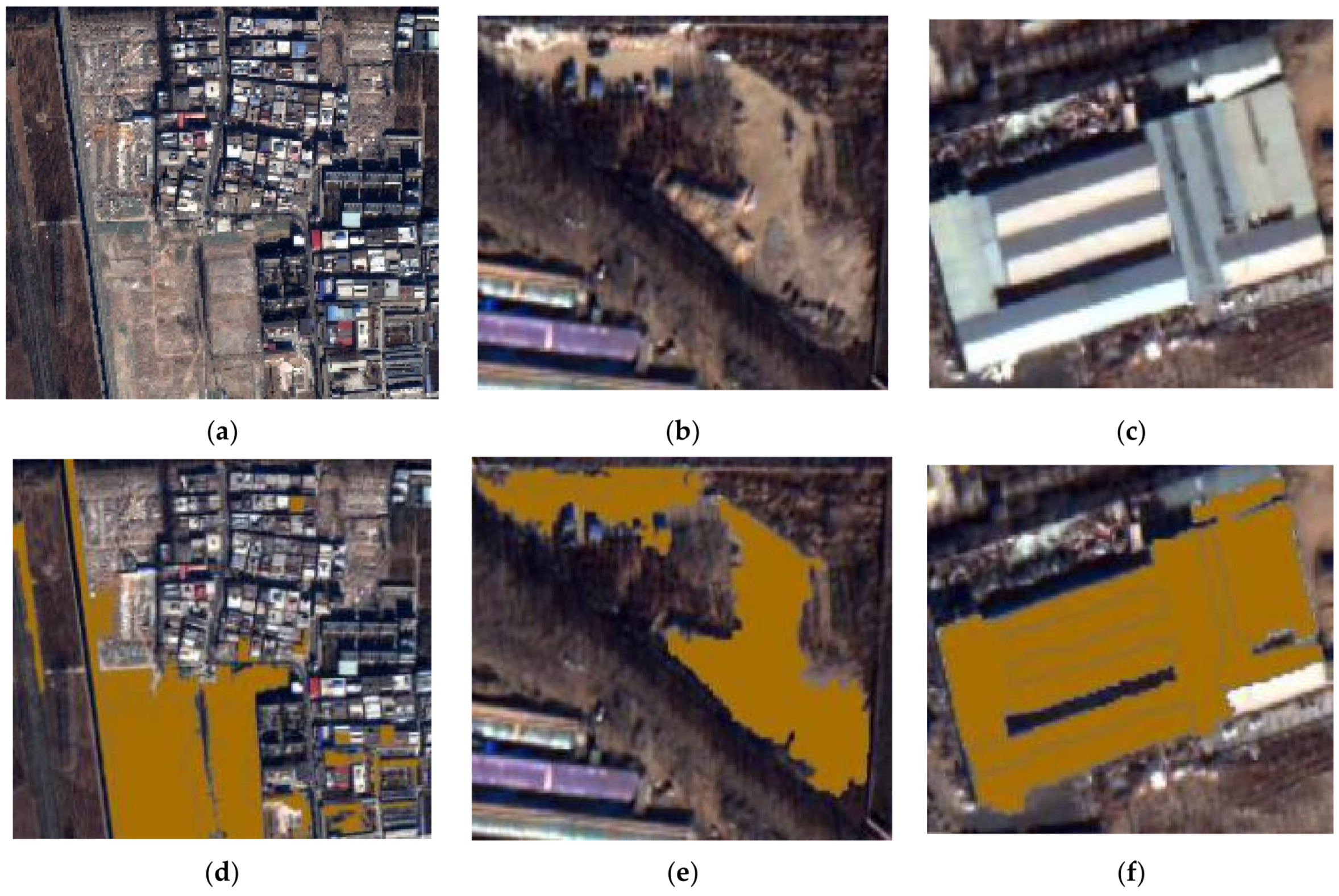
In the case of condition (1), when the intersection takes up a large proportion of the reference range, or the number of objects beyond the reference range is small, it is considered that the separability meets the requirements (
Figure 13a). When the reference range includes construction waste objects, and the proportion of the construction waste is large, the separability is considered to meet the requirements (
Figure 13b). When the construction waste contains the reference range, separability is considered to meet the requirements (
Figure 13c). The judgment of the proportion size must be analyzed according to the actual situation. We evaluated the separability by taking the proportion of greater than or equal to 50% to be a good separability standard.
Formula (15) is the overall separability evaluation index for evaluating the construction waste identification. In Equation (15), the number of construction waste areas whose separability meets the requirements is taken as the numerator, and the total number of construction waste areas whose separability meets the requirements plus the number of wrong and missing areas is taken as the denominator. Equations (16)–(18) are the separability evaluation indexes of the construction waste and bare soil, buildings, and vegetation, respectively.
where
a is the number of actual construction waste accumulation areas,
b is the number of commission classification areas,
c represents the number of omission classification areas,
d represents the number of commission classification areas between the construction waste and bare soil,
e represents the number of commission classification areas between the construction waste and the buildings, and
f represents the number of omission classification areas between the construction waste and vegetation. The value range of the separability index is between 0 and 1, and the larger the value is, the better the separability quality.





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}