Integrated Geomatic Techniques for Georeferencing and Reconstructing the Position of Underground Archaeological Sites: The Case Study of the Augustus Sundial (Rome)

 ,
,  ,
,  ,
,  , ,
, ,  ,
,  and
and
Abstract
1. Introduction
- To support with great geometric accuracy the evaluation of the feasibility of continuing the excavations, considering that a mere 5 mm inaccuracy in the positions of the visible points (that presently stretches for around seven metres) can lead to an uncertainty of about 0.4 m in the most distant part still to be discovered, which would be tens of metres from the part already excavated, so lower accuracy could be inadequate;
- To allow the reconstruction of the observable geometric characteristics of the sundial in order to evaluate the possibility of a rigorous mathematical and astronomical reconstruction of the sundial’s functioning during a subsequent phase of research.
Uniqueness and Historic Introduction of the Site
2. Materials and Methods
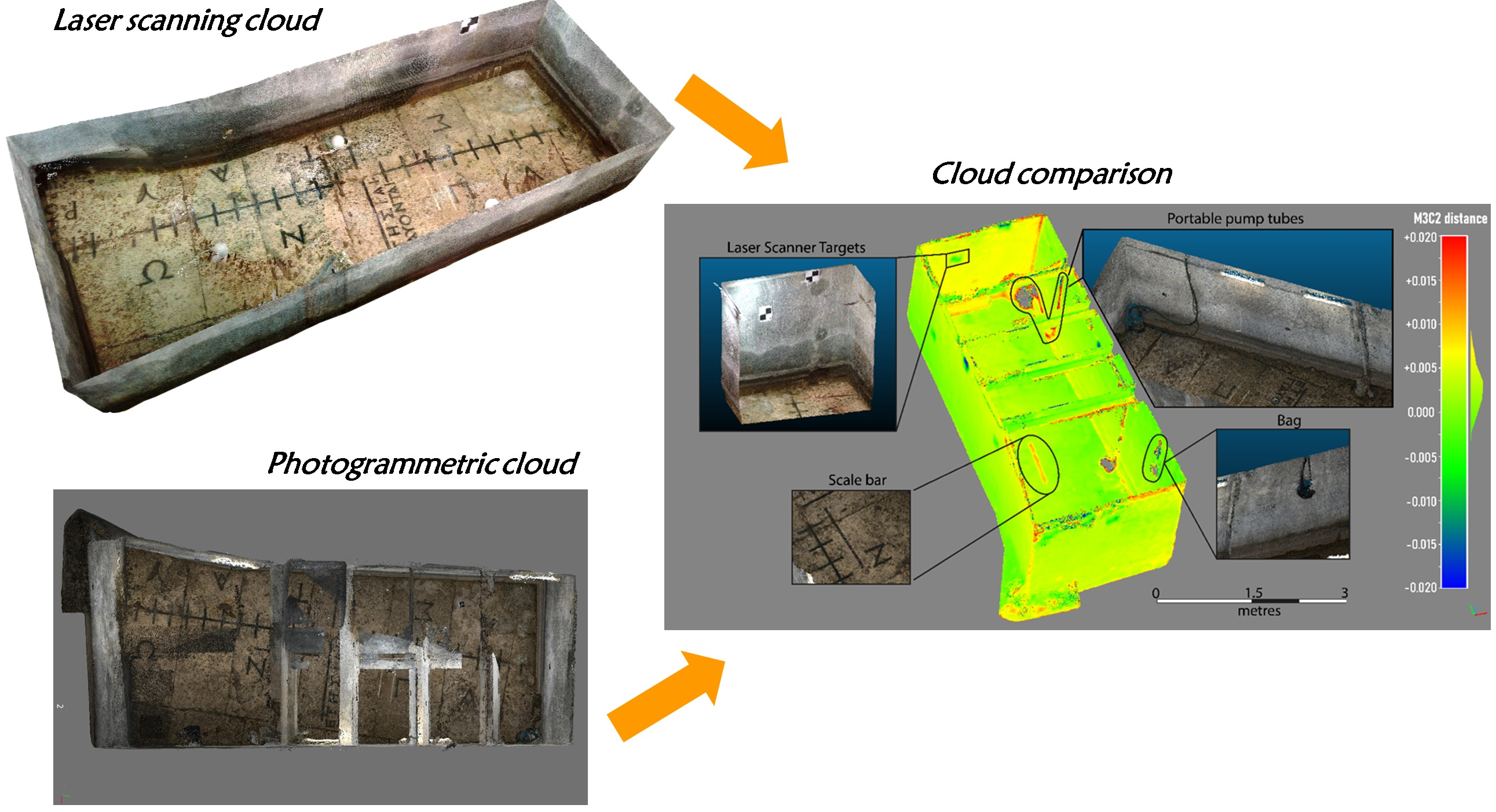
2.1. GNSS Network
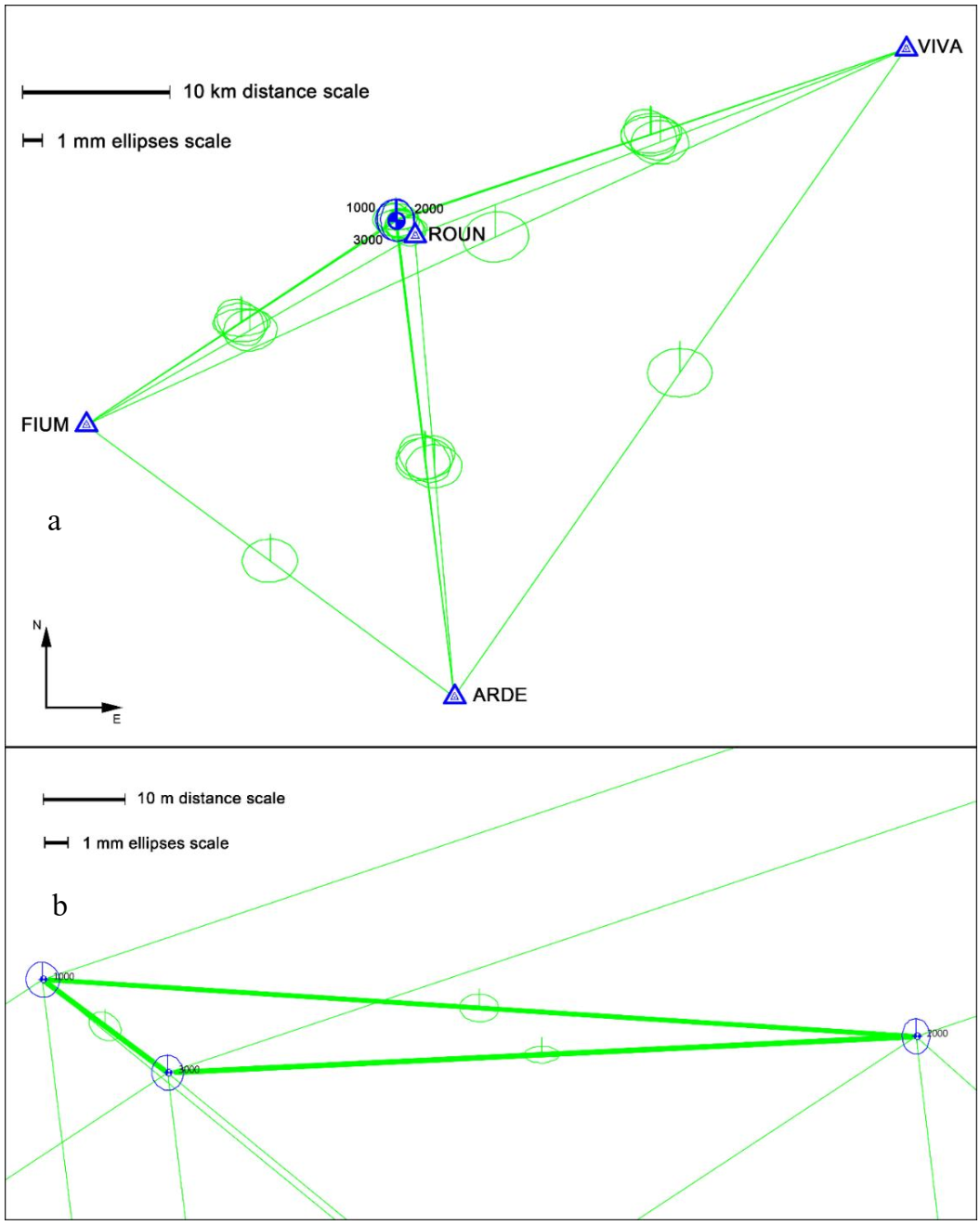
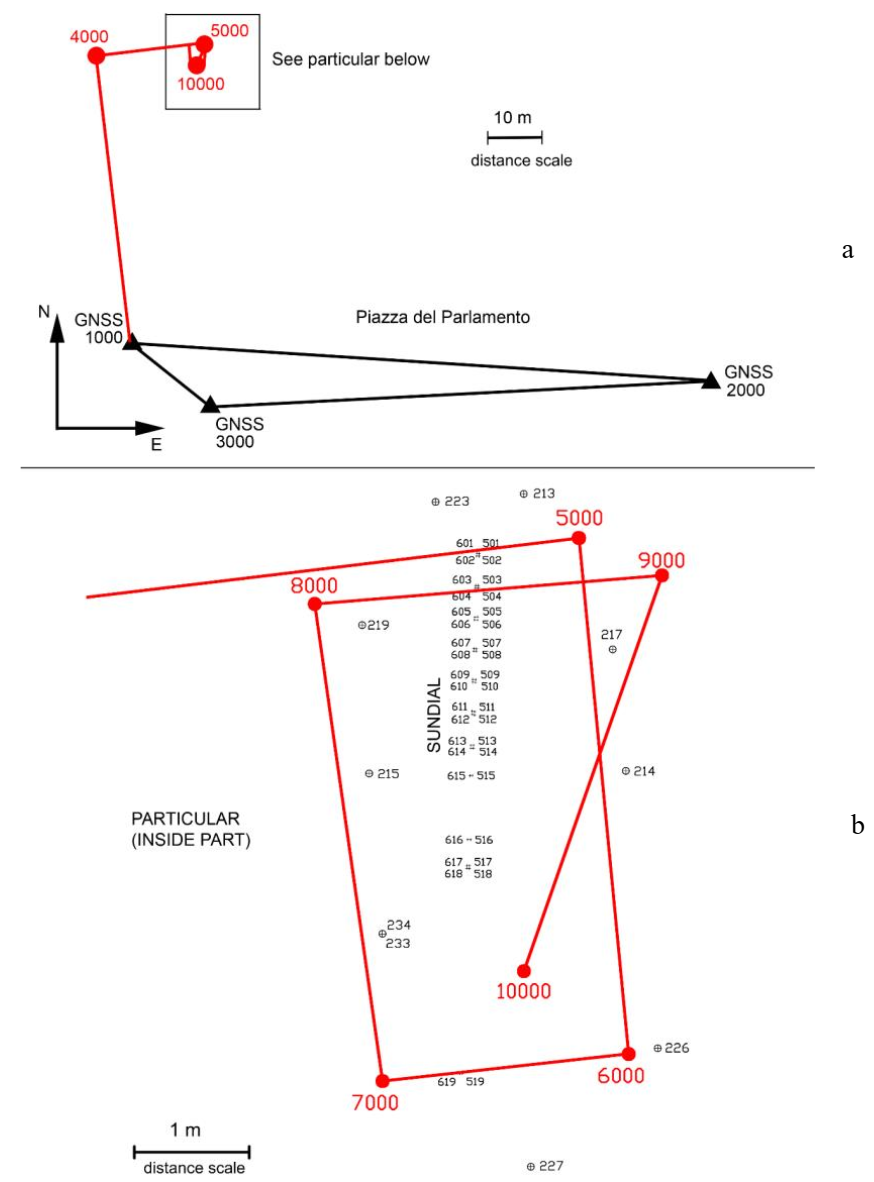
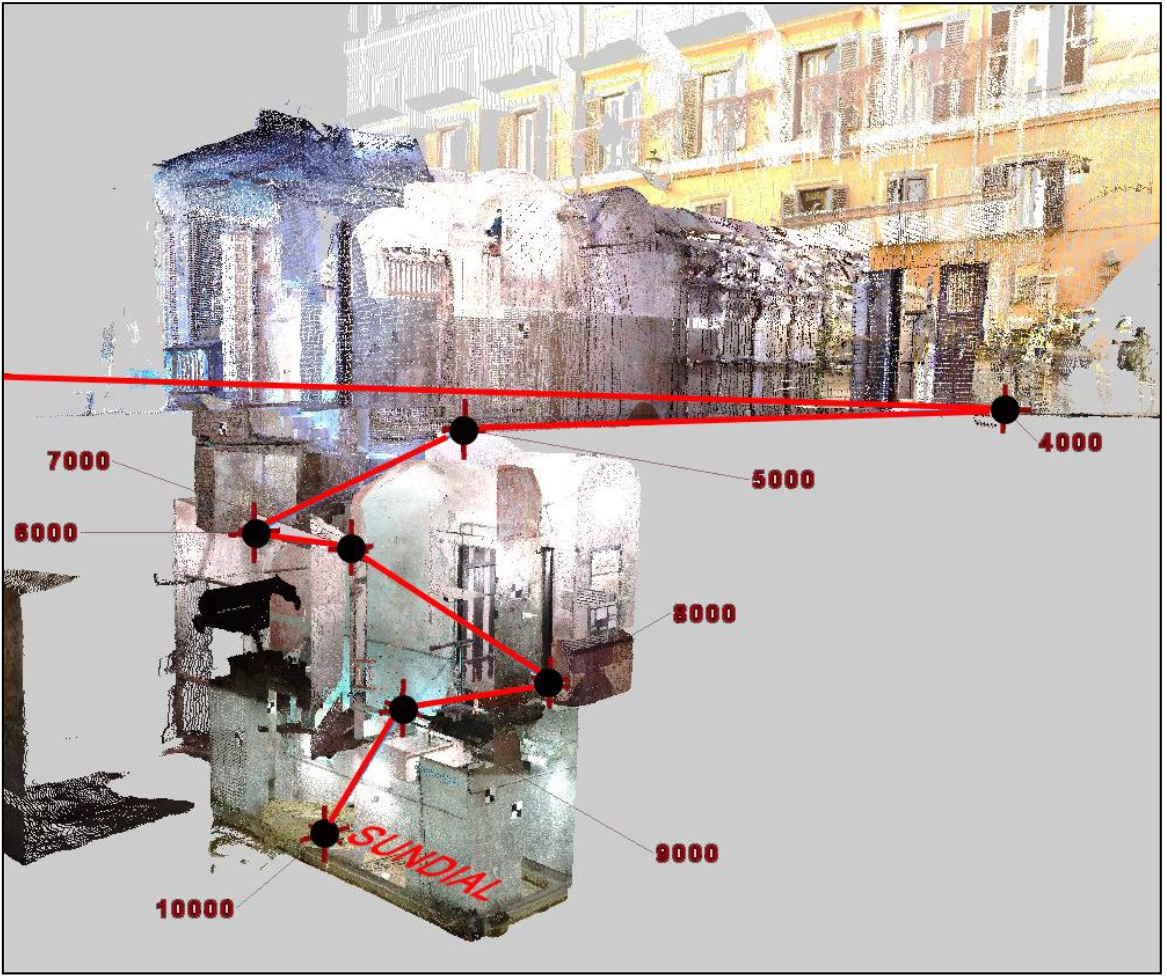
2.2. Local Geodetic Network
- 1000, 2000 and 3000 in Piazza del Parlamento (coincident with three GNSS stations).
- 4000 in front of the entrance to the building including the sundial (Via di Campo Marzio).
- 5000, 6000, 7000, 8000, 9000 and 10,000 inside the building (10,000 in the sundial room).
- The instrument used is a Leica TS06 total station, with the following specifications:
- Angular accuracy (ISO 17123-3) ± 2″ (0.6 mgon)
- Distance accuracy (ISO 17123-4) ± (1.5 mm + 2 ppm) on reflector prism± (2.0 mm + 2 ppm) on opaque surfaces
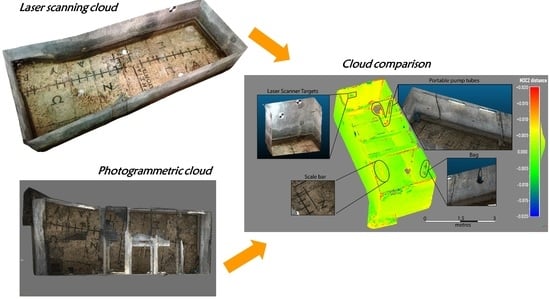
2.3. TLS Survey
2.4. Photogrammetric Survey
3. Results
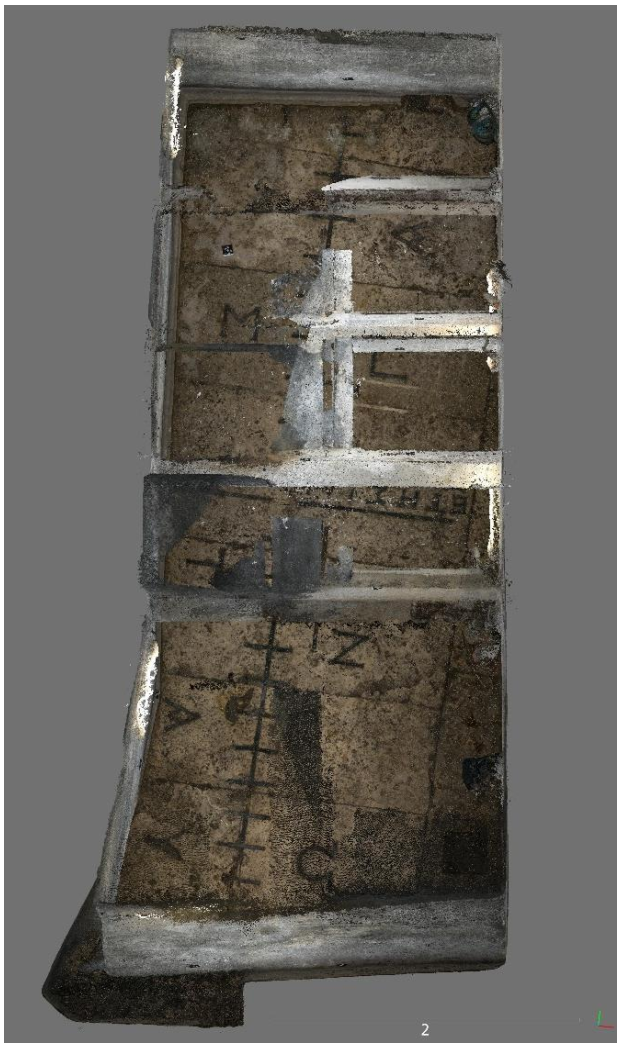
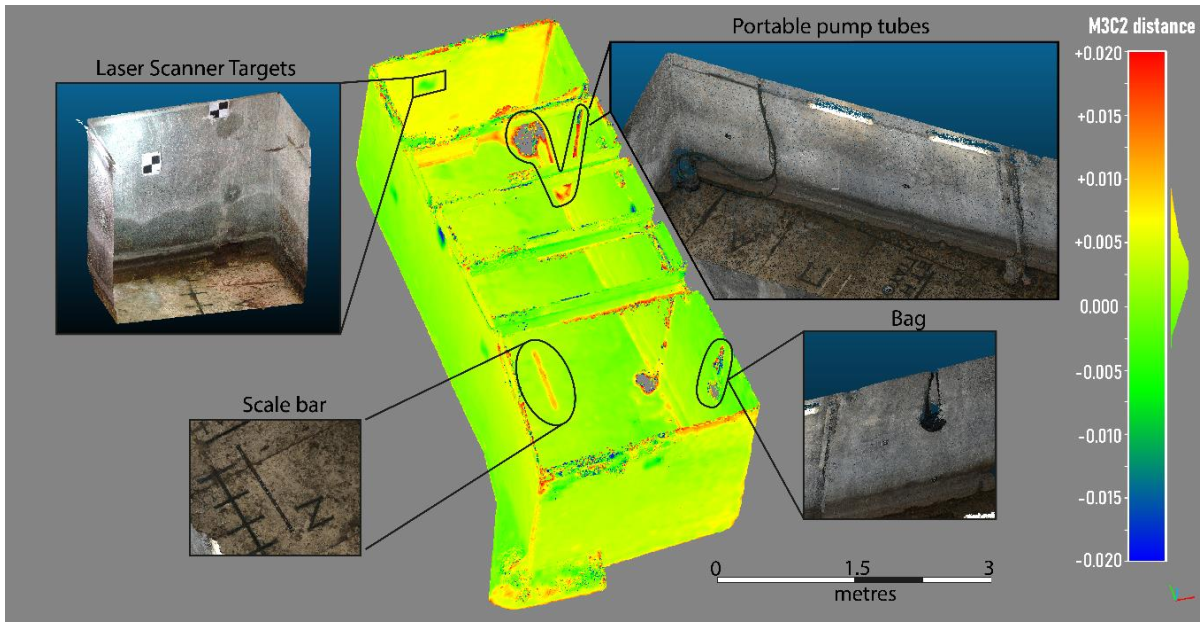
- The calibrated scale bar used for photogrammetric survey.
- The targets placed on the walls during laser scanner survey.
- The tubes of the portable pump used for drying the floor from groundwater during laser scanner survey.
- A bag hung on the eastern wall.
4. Discussion
5. Conclusions and Further Developments
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. Lond. B 1979, 203, 405–426. [Google Scholar] [CrossRef] [PubMed]
- Baiocchi, V.; Barbarella, M.; D’Alessio, M.T.; Lelo, K.; Troisi, S. The sundial of Augustus and its survey: Unresolved issues and possible solutions. Acta Geod. Geophys. 2016, 51, 527–540. [Google Scholar] [CrossRef]
- Albèri Auber, P. Reconstructing Augustus’ Montecitorio obelisk: A gnomonist’s point of view. In The Horologium of Augustus: Debate and Context; Haselberger, L., Ed.; Journal of Roman Archaeology: Portsmouth, RI, USA, 2014; pp. 62–76. [Google Scholar]
- Guarnieri, A.; Vettore, A.; Camarda, M.; Costantino, D. Automatic registration of large range datasets with spin-images. J. Cult. Herit. 2011, 12, 476–484. [Google Scholar] [CrossRef]
- McPherron, S.J.P. Artifact orientations and site formation processes from total station proveniences. J. Archaeol. Sci. 2005, 32, 1003–1014. [Google Scholar] [CrossRef]
- Dibble, H.L. Measurement of artifact provenience with an electronic theodolite. J. Field Archaeol. 1987, 14, 249–254. [Google Scholar]
- Masiero, A.; Fissore, F.; Guarnieri, A.; Pirotti, F.; Visintini, D.; Vettore, A. Performance Evaluation of Two Indoor Mapping Systems: Low-Cost UWB-Aided Photogrammetry and Backpack Laser Scanning. Appl. Sci. 2018, 8, 416. [Google Scholar] [CrossRef]
- Kersten, T.P.; Lindstaedt, M.; Starosta, D. Comparative geometrical accuracy investigations of hand-held 3D scanning systems—An update. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2018, 42, 507–514. [Google Scholar] [CrossRef]
- Barbarella, M. Digital technology and geodetic infrastructures in Italian cartography. Citta e Storia 2014, 9, 91–110. [Google Scholar]
- McPherron, S.J.; Dibble, H.L.; Goldberg, P. Z. Geoarchaeology 2005, 20, 243–262. [Google Scholar] [CrossRef]
- Nex, F.; Rinaudo, F. LiDAR or Photogrammetry? Integration is the answer. Ital. J. Remote Sens. 2011, 43, 107–121. [Google Scholar] [CrossRef]
- Baltsavias, E.P. A comparison between photogrammetry and laser scanning. ISPRS J. Photogramm. Remote Sens. 1999, 54, 83–94. [Google Scholar] [CrossRef]
- Albrecht, C.M.; Fisher, C.; Freitag, M.; Hamann, H.F.; Pankanti, S.; Pezzutti, F.; Rossi, F. Learning and Recognizing Archeological Features from LiDAR Data. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 5630–5636. [Google Scholar]
- Grussenmeyer, P.; Alby, E.; Assali, P.; Poitevin, V.; Hullo, J.F.; Smigiel, E. Accurate Documentation in Cultural Heritage by merging TLS and high resolution photogrammetric data. In Proceedings of the SPIE—The International Society for Optical Engineering, Munich, Germany, 23–26 May 2011; p. 8085. [Google Scholar] [CrossRef]
- Guidi, G.; Russo, M.; Ercoli, S.; Remondino, F.; Rizzi, A.; Menna, F. A multi-resolution methodology for the 3D modeling of large and complex archeological areas. Int. J. Archit. Comput. 2019, 7, 39–55. [Google Scholar] [CrossRef]
- Pavelka, K.; Šedina, J.K., Jr. Combined precise documentation and virtual reconstruction of Prophet Nahum shrine in Alqosh, Iraq. ISPRS-Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, 42, 909–913. [Google Scholar] [CrossRef]
- Alessandri, L.; Baiocchi, V.; Del Pizzo, S.; Di Ciaccio, F.; Onori, M.; Rolfo, M.F.; Troisi, S. A flexible and swift approach for 3D image–based survey in a cave. Appl. Geomat. 2020. [Google Scholar] [CrossRef]
- Skarlatos, D.; Menna, F.; Nocerino, E.; Agrafiotis, P. Precision potential of underwater networks for archaeological excavation through trilateration and photogrammetry. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, 42, 175–180. [Google Scholar] [CrossRef]
- Matracchi, P.; Radicioni, F.; Stoppini, A.; Tosi, G. The cathedral of s. Lorenzo in Perugia and the hypogeal spaces. Geomatic techniques for spatial investigations aimed at the knowledge and interpretation of the origin of the transept. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 849–856. [Google Scholar] [CrossRef]
- Troisi, S.; Baiocchi, V.; Del Pizzo, S.; Giannone, F. A prompt methodology to georeference complex hypogea environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 639–644. [Google Scholar] [CrossRef]
- Coarelli, F. Il Campo Marzio occidentale. Storia e topografia. MEFRA 1977, 89, 842–843. [Google Scholar] [CrossRef]
- La Rocca, E. Augustus’ Solar Meridian and the Augustan Urban Program in the northern Campus Martius: Attempt at a holistic view. Horol. Augustus Debate Context JRA 2014, 99, 121–165. [Google Scholar]
- Polverini, L. Il calendario giuliano. In L’ultimo Cesare; Urso, G., Ed.; L’Erma di Bretschneider: Roma, Italy, 2000; pp. 245–258. [Google Scholar]
- Polverini, L. Augusto e il controllo del tempo. In Studi Su Augusto. In Occasione Del XX Centenario Della Morte; Negri, G., Valvo, A.G., Eds.; Giappichelli Editore: Torino, Italy, 2016; pp. 95–113. [Google Scholar]
- Heslin, P. Augustus, Domitian and the So-called Horologium Augusti. J. Roman Stud. 2007, 97, 16–17. [Google Scholar] [CrossRef][Green Version]
- De Rossi, G.B. Note di topografia romana, in Studi e documenti di Storia e Diritto, Pubblicazione periodica dell’Accademia di Conferenze Storico-Giuridiche; Tipografia della Pace: Roma, Italy, 1882; pp. 59–60. [Google Scholar]
- Buchner, E. Solarium Augusti und Ara Pacis; Römische Mitteilungen: Berlin, Germany, 1976; p. 345. [Google Scholar]
- Leonhardt, G. Horologium and Mausoleum Augusti: An overview of the fieldwork (1979–1997) and the existing documentation. Horol. Augustus Debate Context JRA 2014, 99, 101–106. [Google Scholar]
- Schütz, M. The Horologium on the Campus Martius reconsidered. Horol. Augustus Debate Context JRA 2014, 24, 43–51. [Google Scholar]
- Ing. Paolo Albéri Auber. Available online: https://www.ingauber-meridiane.it/ (accessed on 17 November 2020).
- Portale Della Rete GNSS Regione Lazio. Available online: http://gnss-regionelazio.dyndns.org/Spiderweb/frmIndex.aspx (accessed on 17 November 2020).
- Radicioni, F.; Stoppini, A. Umbria’s new multi-constellation GNSS network. GeoMedia 2019, 23, 6–11. [Google Scholar]
- Leick, A. Statistics in Least Square Adjustment. In GPS Satellite Surveying; John Wiley & Sons: Hoboken, NJ, USA, 1990; pp. 105–126. ISBN 978047181990-5. [Google Scholar]
- Radicioni, F.; Matracchi, P.; Brigante, R.; Brozzi, A.; Cecconi, M.; Stoppini, A.; Tosi, G. The Tempio della Consolazione in Todi: Integrated geomatic techniques for a monument description including structural damage evolution in time. In Proceedings of the ISPRS-The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 27 October 2017; pp. 433–440. [Google Scholar] [CrossRef]
- Baiocchi, V.; Barbarella, M.; Del Pizzo, S.; Giannone, F.; Troisi, S.; Piccaro, C.; Marcantonio, D. Augusto’s sundial: Image-based modeling for reverse engeneering purposes. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2017, 42, 63–69. [Google Scholar] [CrossRef]
- Fraser, C.S. Digital camera self-calibration. ISPRS J. Photogramm. Remote Sens. 1997, 52, 149–159. [Google Scholar] [CrossRef]
- Baiocchi, V.; Giannone, F.; Monti, F.; Vatore, F. ACYOTB Plugin: Tool for Accurate Orthorectification in Open-Source Environments. ISPRS Int. J. Geo-Inf. 2020, 9, 11. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name | Site | Receiver/Antenna Type | Satellites | Distance (km) |
|---|---|---|---|---|
| ROUN | Rome University | LEICA GR10/LEIAR25.R4 LEIT | GPS + GLONASS | 1.6 |
| FIUM | Fiumicino | LEICA GR10/LEIAR25.R4 LEIT | GPS + GLONASS | 25.2 |
| ARDE | Ardea | LEICA GR10/LEIAR25.R4 LEIT | GPS + GLONASS | 32.6 |
| VIVA | Vicovaro | LEICA GR10/LEIAR25.R4 LEIT | GPS + GLONASS | 36.5 |
| Points | dN | dE | dH |
|---|---|---|---|
| 1000 | 0.000 | 0.000 | 0.000 |
| 2000 | 0.000 | 0.000 | 0.000 |
| 3000 | 0.000 | 0.000 | 0.000 |
| 4000 | −0.001 | 0.000 | 0.002 |
| 5000 | −0.001 | 0.002 | 0.002 |
| 6000 | −0.001 | 0.001 | 0.002 |
| 7000 | 0.003 | −0.001 | −0.003 |
| 8000 | 0.002 | 0.000 | 0.002 |
| 9000 | −0.001 | −0.001 | −0.001 |
| 10,000 | 0.001 | 0.000 | −0.001 |
| Points | Major Semiaxis | Minor Semiaxis | Azimuth |
|---|---|---|---|
| 1000 | 0.000 | 0.000 | 0.000 |
| 2000 | 0.000 | 0.000 | 0.000 |
| 3000 | 0.000 | 0.000 | 0.000 |
| 4000 | 0.005 | 0.002 | 193.772 |
| 5000 | 0.005 | 0.005 | 179.442 |
| 6000 | 0.006 | 0.005 | 186.632 |
| 7000 | 0.007 | 0.006 | 1.243 |
| 8000 | 0.008 | 0.007 | 182.303 |
| 9000 | 0.009 | 0.008 | 193.532 |
| 10,000 | 0.010 | 0.009 | 36.679 |
| Target | On/Off | dN | dE | dH |
|---|---|---|---|---|
| T221 | Off | 0.013 | 0.001 | −0.002 |
| T215 | On | 0.004 | −0.001 | 0.001 |
| T216 | On | 0.001 | 0.001 | 0.002 |
| T217 | On | −0.002 | 0.000 | 0.000 |
| T218 | Off | 0.000 | −0.010 | 0.003 |
| T201 | Off | 0.001 | −0.005 | −0.004 |
| T200 | On | 0.002 | 0.000 | −0.001 |
| T202 | On | −0.002 | 0.002 | −0.004 |
| T208 | On | 0.000 | 0.001 | 0.000 |
| T203 | Off | 0.011 | −0.008 | 0.000 |
| T209 | Off | −0.007 | 0.001 | 0.003 |
| T220 | On | 0.000 | −0.003 | 0.001 |
| T219 | On | 0.002 | 0.004 | 0.001 |
| T210 | On | −0.003 | 0.001 | 0.001 |
| T211 | Off | −0.002 | 0.006 | 0.002 |
| T212 | On | −0.001 | −0.004 | 0.001 |
| Points | dN | dE |
|---|---|---|
| 1 | −0.002 | 0.000 |
| 2 | −0.001 | 0.000 |
| 3 | −0.002 | 0.001 |
| 4 | −0.003 | 0.001 |
| 5 | −0.003 | −0.002 |
| 6 | 0.000 | −0.002 |
| 7 | 0.002 | −0.004 |
| 8 | −0.002 | −0.003 |
| 9 | −0.003 | −0.002 |
| 10 | −0.002 | −0.003 |
| 11 | −0.002 | −0.004 |
| 12 | −0.001 | −0.004 |
| 13 | −0.003 | −0.003 |
| 14 | −0.002 | −0.005 |
| 15 | −0.003 | −0.003 |
| 16 | −0.003 | −0.001 |
| 17 | 0.001 | 0.000 |
| 18 | −0.001 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baiocchi, V.; Brigante, R.; Del Pizzo, S.; Giannone, F.; Onori, M.; Radicioni, F.; Stoppini, A.; Tosi, G.; Troisi, S.; Baumgartner, M. Integrated Geomatic Techniques for Georeferencing and Reconstructing the Position of Underground Archaeological Sites: The Case Study of the Augustus Sundial (Rome). Remote Sens. 2020, 12, 4064. https://doi.org/10.3390/rs12244064
Baiocchi V, Brigante R, Del Pizzo S, Giannone F, Onori M, Radicioni F, Stoppini A, Tosi G, Troisi S, Baumgartner M. Integrated Geomatic Techniques for Georeferencing and Reconstructing the Position of Underground Archaeological Sites: The Case Study of the Augustus Sundial (Rome). Remote Sensing. 2020; 12(24):4064. https://doi.org/10.3390/rs12244064
Chicago/Turabian StyleBaiocchi, Valerio, Raffaella Brigante, Silvio Del Pizzo, Francesca Giannone, Matteo Onori, Fabio Radicioni, Aurelio Stoppini, Grazia Tosi, Salvatore Troisi, and Marta Baumgartner. 2020. "Integrated Geomatic Techniques for Georeferencing and Reconstructing the Position of Underground Archaeological Sites: The Case Study of the Augustus Sundial (Rome)" Remote Sensing 12, no. 24: 4064. https://doi.org/10.3390/rs12244064
APA StyleBaiocchi, V., Brigante, R., Del Pizzo, S., Giannone, F., Onori, M., Radicioni, F., Stoppini, A., Tosi, G., Troisi, S., & Baumgartner, M. (2020). Integrated Geomatic Techniques for Georeferencing and Reconstructing the Position of Underground Archaeological Sites: The Case Study of the Augustus Sundial (Rome). Remote Sensing, 12(24), 4064. https://doi.org/10.3390/rs12244064