Modeling Australian TEC Maps Using Long-Term Observations of Australian Regional GPS Network by Artificial Neural Network-Aided Spherical Cap Harmonic Analysis Approach




Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
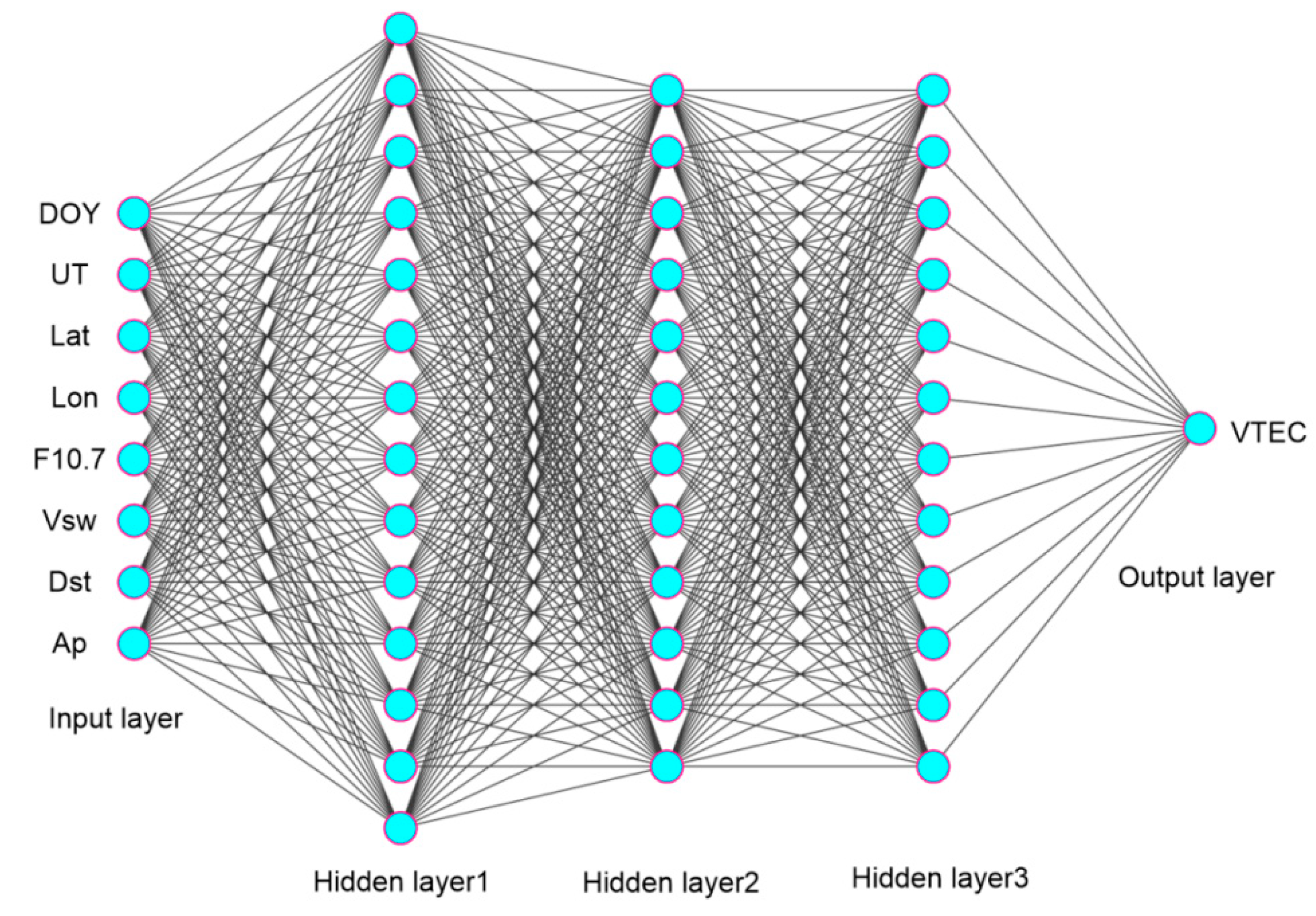
2.2. Artificial Neural Network-Based Australian TEC Model
2.3. ANN-Aided SCHA Approach for Australian VTEC Modeling
- (1)
- The slant TEC along the path from a satellite to a receiver is estimated by the dual-frequency observations using pseudo-ranges smoothed with carrier phases, and the hardware differential code biases (DCB) of GNSS satellites and receivers are also corrected, please refer to [29]. The TEC in any epoch can be computed by the linear combination of pseudo-ranges and carrier phases as follows:where and represent the TEC values derived from pseudo-range and carrier phase observations at epoch k, respectively. The subscripts r and s indicate the receiver and satellite, f1 and f2 are signal frequencies, Pi and ϕi are dual-frequency pseudo-range and carrier phase observations. λ1 and λ2 are the wavelengths of carrier phase l1 and l2, N1 and N2 are the ambiguities of carrier phase measurements (l1 and l2). and are the receiver and satellite DCBs on the pseudo-range measurements, and are the receiver and satellite DCBs on the carrier phase measurements. Usually, the receiver and satellites DCBs are regarded as stable in a few days [30], thenGenerally, the ΔTECk is stable in a day, a more precise TEC observation can be computed by a recursive smoothing process.The smoothed ionospheric TEC calculates by:
- (2)
- Convert the slant TEC (STEC) to the vertical TEC (VTEC) at a pierce point using the single-layer model function, the height of the single layer is set as 428.8 km.
- (3)
- Predict the TEC time series over the central points of the blank grid in Figure 1 using the ANN-based Australian TEC model, the blank grid means the regions where no experimental data are available.
- (4)
- Determine the pole point and the half-angle of the spherical cap to design the spherical cap coordinate system. According to the studying scope of the Australian map, the pole of the spherical cap is set as (−25°, 133°), the half-angle is determined as 20°, and the maximum order is chosen as 8.
- (5)
- Transform the coordinates of ionospheric pierce points and the central points of blank grids from the geographic coordinate system to the spherical cap coordinate system, Figure 3 illustrates the transformation relationship between the spherical cap coordinate system and the geographic coordinate system. If the geographic coordinates of the pole of the spherical cap are θP and λP, then the spherical cap coordinate (θC, λC) of any point Q (θ, λ) can be calculated using the following equations:
- (6)
- Calculate the model coefficients (, ) in Equation (1) using the least square method, and verify the performance of the estimated spherical cap model by comparing the model’s predicted TEC values with the TEC observations at the pierce points of GNSS stations.
3. Results
3.1. Comparison with the AIMSCHA Model in 2013 and 2017
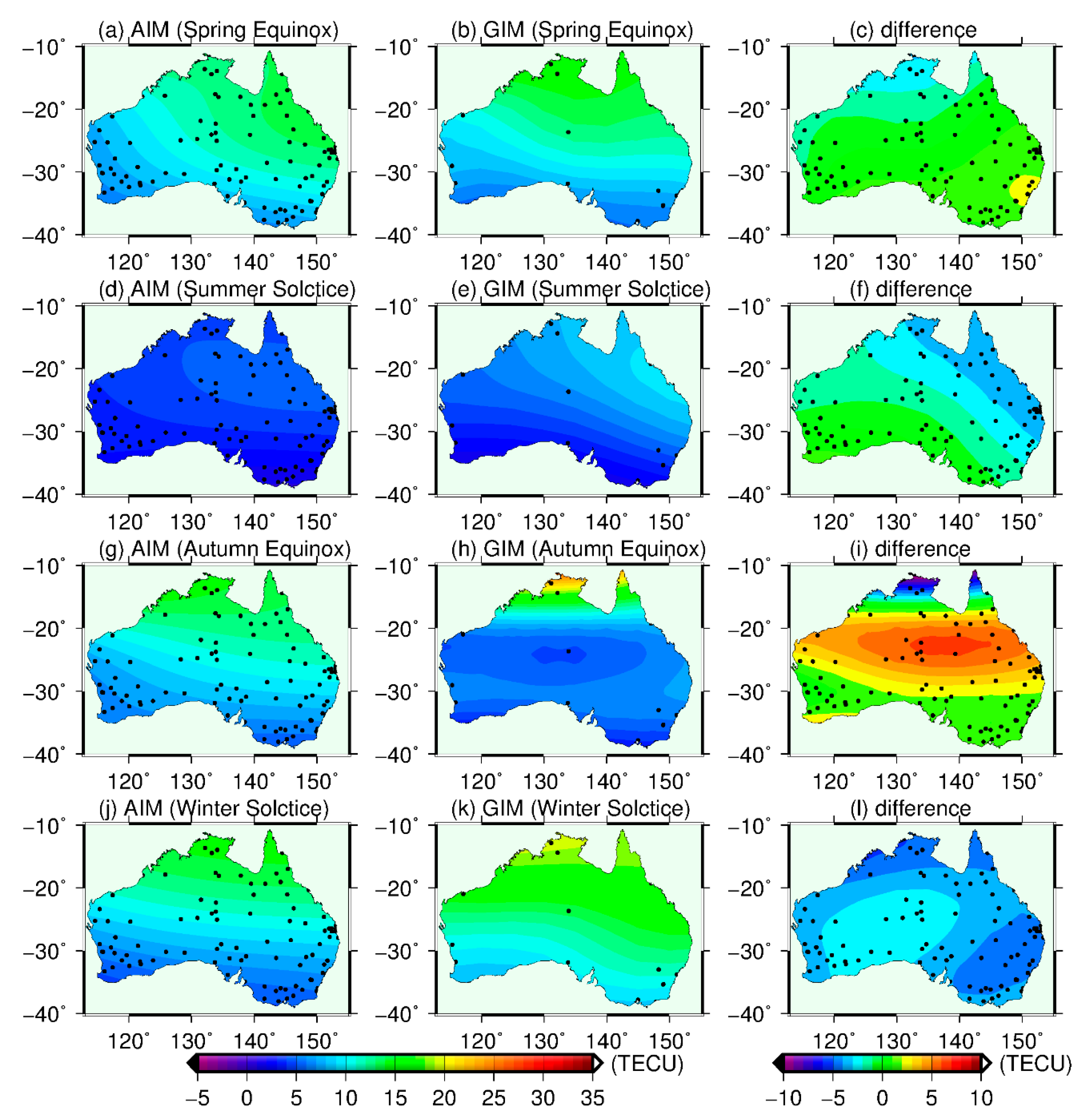
3.2. Seasonal and Hourly Features of the AIM Maps
3.3. Mapping Performance of the AIM Model under Quiet and Disturbed Geomagnetic Conditions
3.3.1. Validation of the Mapping Performance under Quiet Geomagnetic Condition
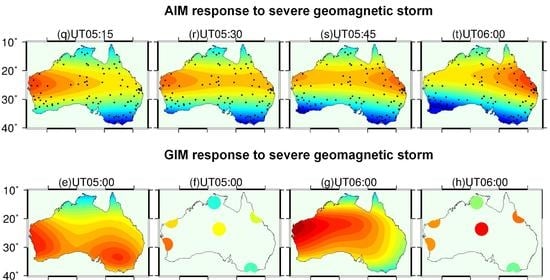
3.3.2. Validation of the Mapping Performance under the Severe Geomagnetic Condition
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Aragón-Àngel, À.; García-Rigo, A.; Salazar, D.; Escudero, M. The ionosphere: Effects, GPS modeling and the benefits for space geodetic techniques. J. Geod. 2011, 85, 887–907. [Google Scholar] [CrossRef]
- Wang, N.; Yuan, Y.; Li, Z.; Li, Y.; Huo, X.; Li, M. An examination of the Galileo NeQuick model: Comparison with GPS and JASON TEC. GPS Solut. 2017, 21, 605–615. [Google Scholar] [CrossRef]
- Hoque, M.M.; Jakowski, N.; Berdermann, J. Ionospheric correction using NTCM driven by GPS Klobuchar coefficients for GNSS applications. GPS Solut. 2017, 21, 1563–1572. [Google Scholar] [CrossRef]
- Ho, C.; Wilson, B.; Mannucci, A.; Lindqwister, U.; Yuan, D. A comparative study of ionospheric total electron content measurements using global ionospheric maps of GPS, TOPEX radar, and the Bent model. Radio Sci. 1997, 32, 1499–1512. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Truhlik, V.; Shubin, V.; Galkin, I.; Reinisch, B.; Huang, X. International Reference Ionosphere 2016: From ionospheric climate to real-time weather predictions. Space Weather 2017, 15, 418–429. [Google Scholar] [CrossRef]
- Olga Maltseva, G.G. Comparison of TEC prediction methods in mid-latitudes with GIM maps. Geod. Geodyn. 2020, 11, 174–181. [Google Scholar] [CrossRef]
- Liu, J.; Chen, R.; Wang, Z.; Zhang, H. Spherical cap harmonic model for mapping and predicting regional TEC. GPS Solut. 2011, 15, 109–119. [Google Scholar] [CrossRef]
- Ghoddousi-Fard, R.; Héroux, P.; Danskin, D.; Boteler, D. Developing a GPS TEC mapping service over Canada. Space Weather 2011, 9, 1–10. [Google Scholar] [CrossRef]
- Jiachun, A.; Zemin, W.; Xinguo, N. GPS-based regional ionospheric models and their suitability in Antarctica. Adv. Polar Sci. 2015, 25, 32–37. [Google Scholar]
- Liu, J.; Chen, R.; An, J.; Wang, Z.; Hyyppa, J. Spherical cap harmonic analysis of the Arctic ionospheric TEC for one solar cycle. J. Geophys. Res. Space Phys. 2014, 119, 601–619. [Google Scholar] [CrossRef]
- Razin, M.-R.G.; Voosoghi, B. Ionosphere tomography using wavelet neural network and particle swarm optimization training algorithm in Iranian case study. Gps Solut. 2017, 21, 1301–1314. [Google Scholar] [CrossRef]
- Li, Z.; Yuan, Y.; Wang, N.; Hernandez-Pajares, M.; Huo, X. SHPTS: Towards a new method for generating precise global ionospheric TEC map based on spherical harmonic and generalized trigonometric series functions. J. Geod. 2015, 89, 331–345. [Google Scholar] [CrossRef]
- Sivavaraprasad, G.; Deepika, V.S.; SreenivasaRao, D.; Kumar, M.R.; Sridhar, M. Performance evaluation of neural network TEC forecasting models over equatorial low-latitude Indian GNSS station. Geod. Geodyn. 2020, 11, 192–201. [Google Scholar] [CrossRef]
- Astafyeva, E.; Zakharenkova, I.; Huba, J.; Doornbos, E.; Van den IJssel, J. Global ionospheric and thermospheric effects of the June 2015 geomagnetic disturbances: Multi-instrumental observations and modeling. J. Geophys. Res. Space Phys. 2017, 122, 11716–11742. [Google Scholar] [CrossRef]
- Moses, M.; Dodo, J.D.; Ojigi, L.M.; Lawal, K. Regional TEC modelling over Africa using deep structured supervised neural network. Geod. Geodyn. 2020, 11, 367–375. [Google Scholar] [CrossRef]
- Ramazan Atıcı, S.S. Global investigation of the ionospheric irregularities during the severe geomagnetic storm on September 7–8, 2017. Geod. Geodyn. 2020, 11, 211–221. [Google Scholar] [CrossRef]
- Li, S.; Zhou, H.; Xu, J.; Wang, Z.; Li, L.; Zheng, Y. Modeling and analysis of ionosphere TEC over China and adjacent areas based on EOF method. Adv. Space Res. 2019, 64, 400–414. [Google Scholar] [CrossRef]
- Chang, X.; Zou, B.; Guo, J.; Zhu, G.; Li, W.; Li, W. One sliding PCA method to detect ionospheric anomalies before strong Earthquakes: Cases study of Qinghai, Honshu, Hotan and Nepal earthquakes. Adv. Space Res. 2017, 59, 2058–2070. [Google Scholar] [CrossRef]
- Zhang, Z.; Pan, S.; Gao, C.; Zhao, T.; Gao, W. Support Vector Machine for Regional Ionospheric Delay Modeling. Sensors 2019, 19, 2947. [Google Scholar] [CrossRef]
- Tulasi Ram, S.; Sai Gowtam, V.; Mitra, A.; Reinisch, B. The improved two-dimensional artificial neural network-based ionospheric model (ANNIM). J. Geophys. Res. Space Phys. 2018, 123, 5807–5820. [Google Scholar] [CrossRef]
- Okoh, D.; Seemala, G.; Rabiu, B.; Habarulema, J.B.; Jin, S.; Shiokawa, K.; Otsuka, Y.; Aggarwal, M.; Uwamahoro, J.; Mungufeni, P. A neural network-based ionospheric model over Africa from Constellation Observing System for Meteorology, Ionosphere, and Climate and Ground Global Positioning System observations. J. Geophys. Res. Space Phys. 2019, 124, 10512–10532. [Google Scholar] [CrossRef]
- Huang, Z.; Yuan, H. Ionospheric single-station TEC short-term forecast using RBF neural network. Radio Sci. 2014, 49, 283–292. [Google Scholar] [CrossRef]
- Mohammadi, B.; Linh, N.T.T.; Pham, Q.B.; Ahmed, A.N.; Vojteková, J.; Guan, Y.; Abba, S.; El-Shafie, A. Adaptive neuro-fuzzy inference system coupled with shuffled frog leaping algorithm for predicting river streamflow time series. Hydrol. Sci. J. 2020, 65, 1738–1751. [Google Scholar] [CrossRef]
- Hu, A.; Carter, B.; Currie, J.; Norman, R.; Wu, S.; Wang, X.; Zhang, K. Modeling of topside ionospheric vertical scale height based on ionospheric radio occultation measurements. J. Geophys. Res. Space Phys. 2019, 124, 4926–4942. [Google Scholar] [CrossRef]
- Takahashi, H.; Wrasse, C.; Denardini, C.; Pádua, M.; de Paula, E.; Costa, S.; Otsuka, Y.; Shiokawa, K.; Monico, J.G.; Ivo, A. Ionospheric TEC weather map over South America. Space Weather 2016, 14, 937–949. [Google Scholar] [CrossRef]
- Li, W.; Zhao, D.; He, C.; Hu, A.; Zhang, K. Advanced Machine Learning Optimized by The Genetic Algorithm in Ionospheric Models Using Long-Term Multi-Instrument Observations. Remote Sens. 2020, 12, 866. [Google Scholar] [CrossRef]
- Haines, G. Spherical cap harmonic analysis. J. Geophys. Res. Solid Earth 1985, 90, 2583–2591. [Google Scholar] [CrossRef]
- Haines, G. Computer programs for spherical cap harmonic analysis of potential and general fields. Comput. Geosci. 1988, 14, 413–447. [Google Scholar] [CrossRef]
- Sardon, E.; Rius, A.; Zarraoa, N. Estimation of the transmitter and receiver differential biases and the ionospheric total electron content from Global Positioning System observations. Radio Sci. 1994, 29, 577–586. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2009, 83, 263–275. [Google Scholar]
- Guo, J.; Li, W.; Liu, X.; Kong, Q.; Zhao, C.; Guo, B. Temporal-spatial variation of global GPS-derived total electron content, 1999–2013. PLoS ONE 2015, 10, e0133378. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.-H.; Wang, W.; Hagan, M.E.; Hsiao, C.; Immel, T.; Hsu, M.; Liu, J.; Paxton, L.; Fang, T.-W.; Liu, C. Plausible effect of atmospheric tides on the equatorial ionosphere observed by the FORMOSAT-3/COSMIC: Three-dimensional electron density structures. Geophys. Res. Lett. 2007, 34, L11112. [Google Scholar] [CrossRef]
- Li, W.; Yue, J.; Guo, J.; Yang, Y.; Zou, B.; Shen, Y.; Zhang, K. Statistical seismo-ionospheric precursors of M7. 0+ earthquakes in Circum-Pacific seismic belt by GPS TEC measurements. Adv. Space Res. 2018, 61, 1206–1219. [Google Scholar] [CrossRef]
- Li, W.; Yue, J.; Yang, Y.; He, C.; Hu, A.; Zhang, K. Ionospheric and thermospheric responses to the recent strong solar flares on 6 september 2017. J. Geophys. Res. Space Phys. 2018, 123, 8865–8883. [Google Scholar] [CrossRef]
- Bouya, Z.; Terkildsen, M.; Francis, M. Total electron content forecast model over Australia. In Proceedings of the 40th COSPAR Scientific Assembly, Moscow, Russia, 2–10 August 2014. [Google Scholar]
- Bouya Zahra, T.M.; Dave, N. Regional GPS-based ionospheric TEC model over Australia using Spherical Cap Harmonic Analysis. In Proceedings of the 38th COSPAR Scientific Assembly, Bremen, Germany, 18–15 July 2010; Volume 38, p. 4. [Google Scholar]
- Raghavarao, R.; Nageswararao, M.; Sastri, J.H.; Vyas, G.; Sriramarao, M. Role of equatorial ionization anomaly in the initiation of equatorial spread F. J. Geophys. Res. Space Phys. 1988, 93, 5959–5964. [Google Scholar] [CrossRef]
- Sai Gowtam, V.; Tulasi Ram, S. Ionospheric annual anomaly—New insights to the physical mechanisms. J. Geophys. Res. Space Phys. 2017, 122, 8816–8830. [Google Scholar] [CrossRef]
- Wang Li, J.Y.; Suqin, W.; Yang, Y.; Zhen, L.; Jingxue, B.; Kefei, Z. Ionospheric responses to typhoons in Australia during 2005–2014 using GNSS and FORMOSAT-3/COSMIC measurements. GPS Solut. 2018, 22, 61. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | 2013 (Medium) | 2017 (Minimum) | ||||||
|---|---|---|---|---|---|---|---|---|
| Season | Spring | Summer | Autumn | Winter | Spring | Summer | Autumn | Winter |
| AIMSCHA | 3.76 | 2.68 | 2.82 | 3.84 | 2.37 | 1.75 | 1.83 | 2.11 |
| AIM | 3.41 | 2.42 | 2.54 | 3.65 | 2.16 | 1.57 | 1.68 | 1.98 |
| Ratio | 9.31% | 9.70% | 9.93% | 4.95% | 8.86% | 10.28% | 8.20% | 6.16% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Zhao, D.; Shen, Y.; Zhang, K. Modeling Australian TEC Maps Using Long-Term Observations of Australian Regional GPS Network by Artificial Neural Network-Aided Spherical Cap Harmonic Analysis Approach. Remote Sens. 2020, 12, 3851. https://doi.org/10.3390/rs12233851
Li W, Zhao D, Shen Y, Zhang K. Modeling Australian TEC Maps Using Long-Term Observations of Australian Regional GPS Network by Artificial Neural Network-Aided Spherical Cap Harmonic Analysis Approach. Remote Sensing. 2020; 12(23):3851. https://doi.org/10.3390/rs12233851
Chicago/Turabian StyleLi, Wang, Dongsheng Zhao, Yi Shen, and Kefei Zhang. 2020. "Modeling Australian TEC Maps Using Long-Term Observations of Australian Regional GPS Network by Artificial Neural Network-Aided Spherical Cap Harmonic Analysis Approach" Remote Sensing 12, no. 23: 3851. https://doi.org/10.3390/rs12233851
APA StyleLi, W., Zhao, D., Shen, Y., & Zhang, K. (2020). Modeling Australian TEC Maps Using Long-Term Observations of Australian Regional GPS Network by Artificial Neural Network-Aided Spherical Cap Harmonic Analysis Approach. Remote Sensing, 12(23), 3851. https://doi.org/10.3390/rs12233851