Efficient Marginalized Particle Smoother for Indoor CSS–TOF Localization with Non-Gaussian Errors



Abstract
1. Introduction
- Indoor RF ranging uncertainty. Wireless ranging technique is a convenient solution for indoor positioning and tracking, but suffering from severe uncertainty of radio frequency (RF) measurements. Thus, the probability density taking into account more observations may not necessarily lead to better accuracy.
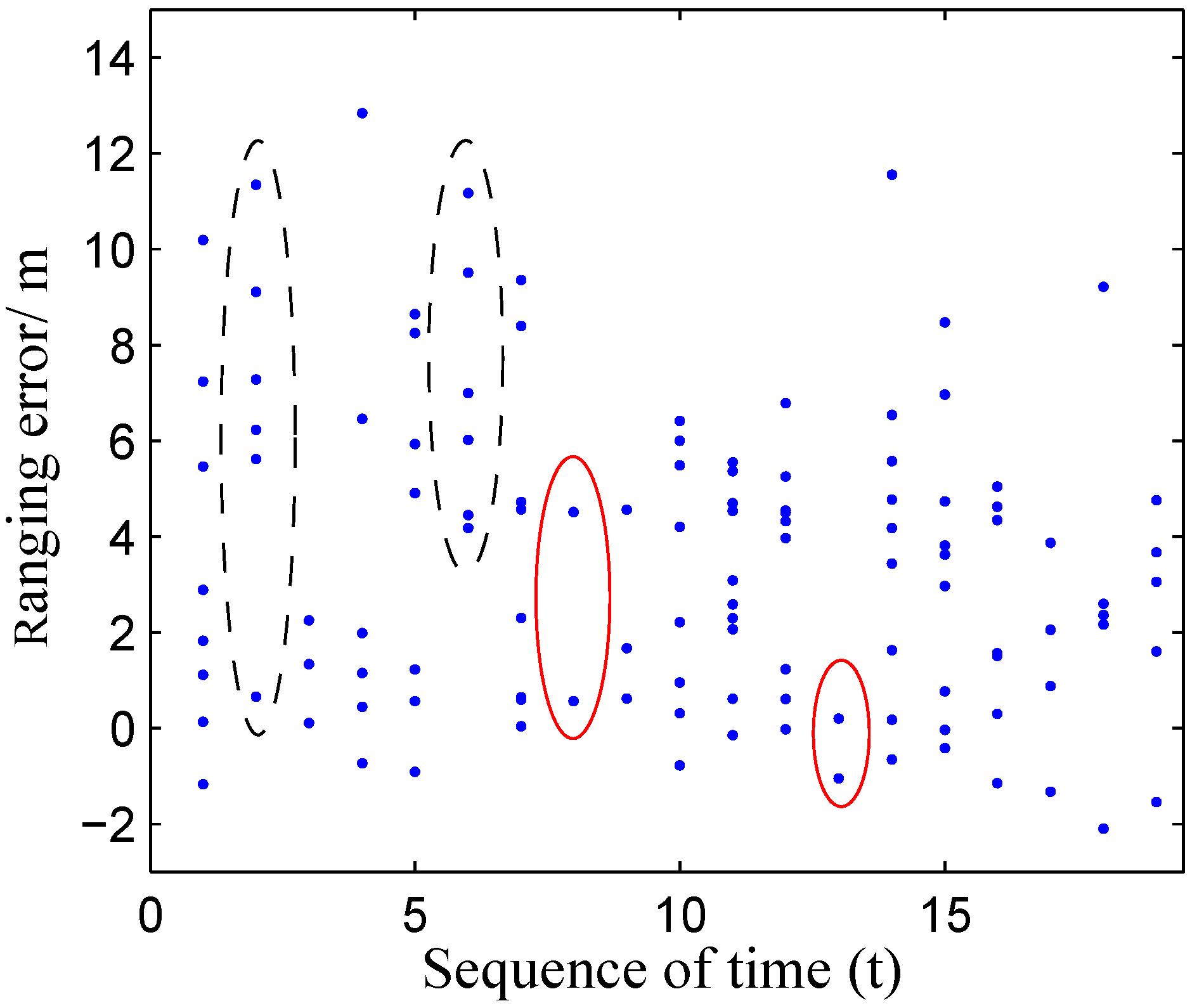
- Nonlinear/non-Gaussian dynamic. People or a mobile device can usually take non-uniform and heterogeneous motions, which are difficult to model. Furthermore, indoor RF ranging error is verified to be non-Gaussian in both simulations [6,7] and real-world experiments [8,9,10]. Hence, both the observation and state transition are prone to be nonlinear and/or non-Gaussian problems, that the closed-form solution often does not exist.
- Priori knowledge. The implementation and performance of the Bayesian framework depend on the priori knowledge of the measurement noise and process models, whereas the prior information is often not accurate.
- Computation, real-time and implementation constraints. To be practical, such a sequential tracking solution should be efficient in computation, time delay, and implementation.
- Portable devices are typically resources limited, i.e., computing, storage, and communication, etc. Hence, the problem, in using in mobile positioning, is the large storage and computation requirement. Therefore, the objective is to optimize the estimation density for continuous trajectories.
- Near real-time position tracking is imposed by a tight delay constraint in the order of milliseconds [11,12]. State estimations require to investigate the entire sequence of the observations and state, which are time-consuming; also, the performance of fixed-Lag smoothing is dependent on the size of the smoothing lag () [13].
- Instability. It is well known that wireless network resources are scarce and time-varying. Thus, the smoothed tracking has to be robust to the problems of sparse measurements, inconsistent measurements or even losing tracking.
- Implement a lightweight marginalized particle smoother (MPS) on the SMC frame, which provides a trackable solution to the nonlinear and non-Gaussian indoor range-based positioning.
- Propose the marginal smoothed smoothing that dynamically derives the posterior from a backward smoothing density in an efficient way. The virtue of MPS is that it can be applied to a very wide class of SMC methods.
- Implement two popular nonlinear smoothing solutions: Forward Filtering Backward Smoothing (FFBS) and Two-filter Smoothing (TFS).
- Combine two linear smoother (Moving Average (MA) smoother and Rauch-Tung-Striebel (RTS) smoother) with a nonlinear filtering output (Generic Particle Filter (GPF)).
- The aforementioned smoothing algorithms are evaluated over indoor CSS–TOF (Chirp-Spread-Spectrum Time-of-Flight) test-bed. Experimental results validate the effectiveness and efficiency of the MPS framework on real-world indoor position tracking.
2. Motivation and Problem Statement
2.1. Motivation
- Sparse anchors or missing measurements: the number of ranging measurements is insufficient due to the sparse anchor deployment or temporary packet loss;
- NLOS scenarios: there are enough ranging measurements, but the LOS measurements are the minority.
2.2. Problem Statement
- Problem 1: Tractable solutionFor 2D range-based positioning, it cannot typically generate an analytical solution to the nonlinear and non-Gaussian models. Particle methods (Monte Carlo methods) [50] offer an approximate solution, unfortunately, they are intractable if the sample size is large.
- Problem 2: Implementation issueIf the smoothing recursion involves the observations many time-series ahead (), it can be computation, storage, and time-consuming. In other words, it is impractical to obtain overall smoothed estimates using the observations from the beginning to the end.
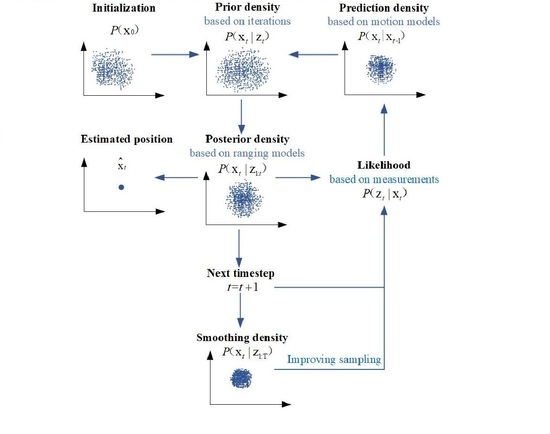
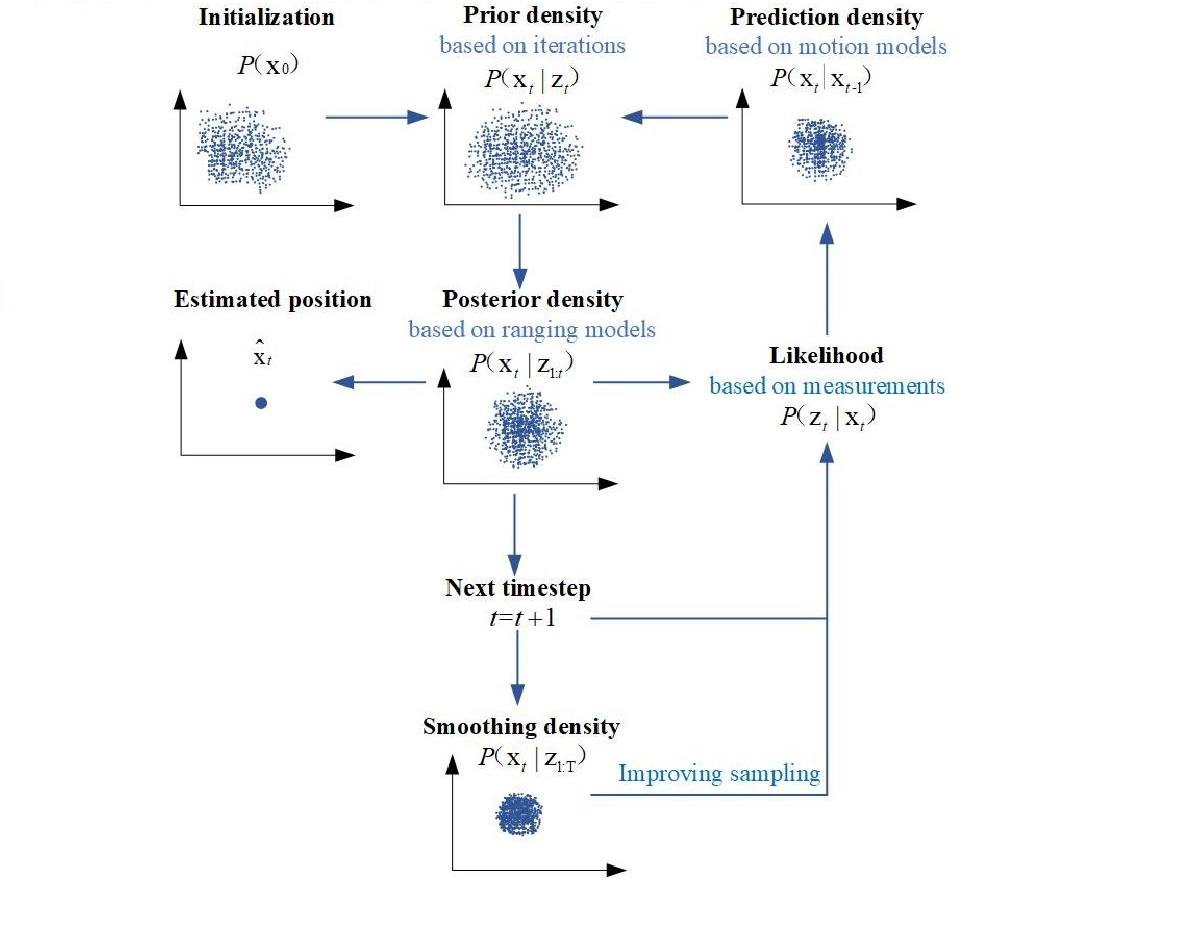
3. Filtering and Smoothing
- Filtering : to estimate the distribution of the state conditionally to the observations up to t.
- Smoothing : to estimate the distribution of the state conditionally to the observations up to T (with ).
3.1. Bayesian Filtering
3.2. Forward Filtering Backward Smoothing (FFBS)
| Algorithm 1 Forward Filtering Backward Smoothing (FFBS) |
|
3.3. Two Filter Smoothing (TFS)
3.4. Marginalized Particle Smoother (MPS)
| Algorithm 2 Two Filter Smoothing (TFS) |
|
| Algorithm 3 Marginalized Particle Smoother (MPS) |
|
4. Combine Linear Smoother with Nonlinear Filtering
4.1. Moving Average
4.2. Kalman Smoother
5. Experiment Performance and Analysis
5.1. Experiment Description
5.2. Evaluation Criteria
5.3. Positioning Accuracy
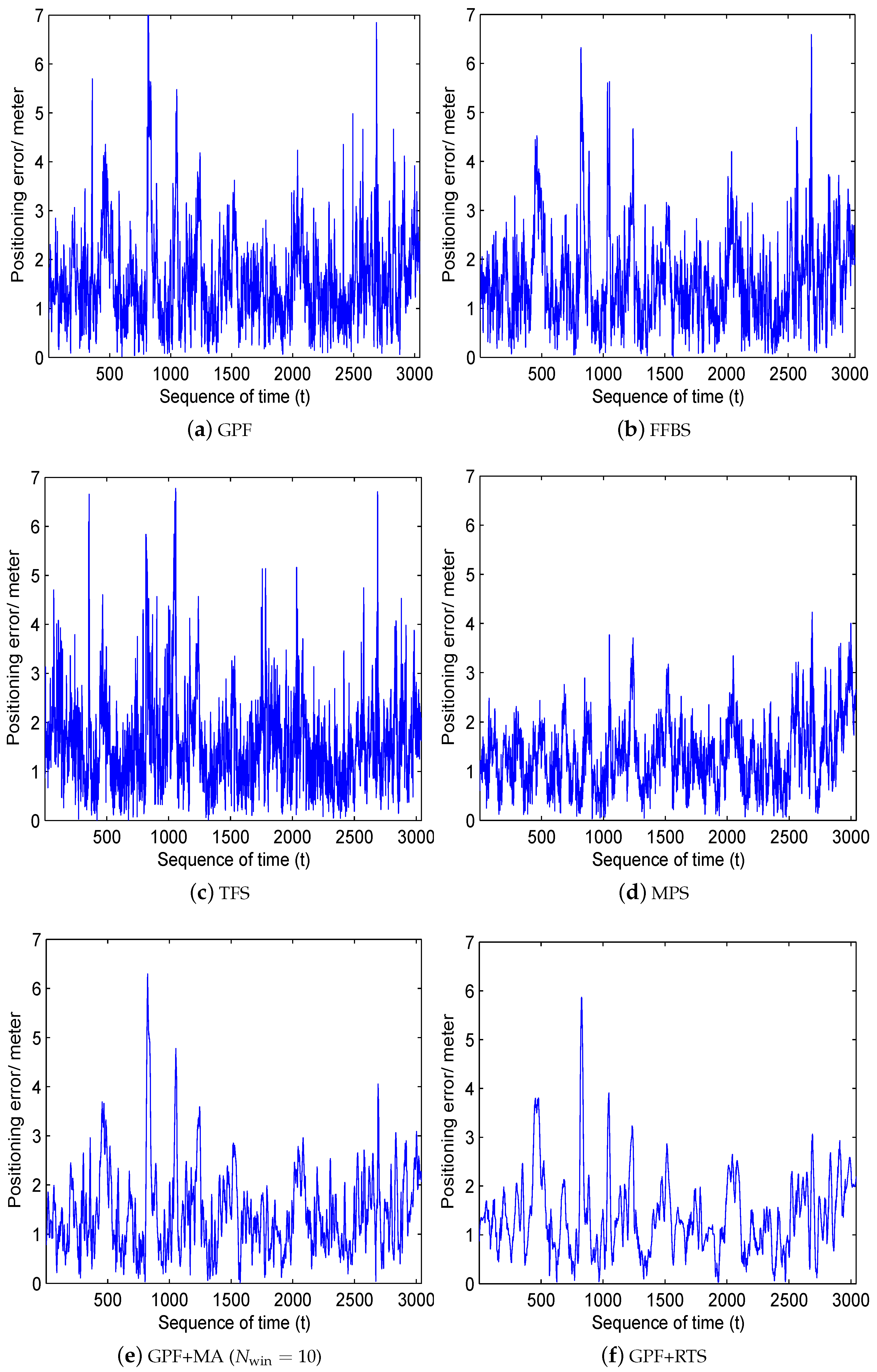
- The FFBS and TFS make almost no improvement compared with GPF, by reason that the smoothing density only influences the state estimation rather than the probability recursion; thus, FFBS and TFS cannot be expected to modify the posterior.
- The proposed MPS observes the lowest values of the MEAN, RMSE, MAX and (the standard deviation of the positioning errors indicates the estimation stability), which is a consequence that the posterior propagation is derived from the smoothing density instead of the prediction density.
- Combining the RTS smoother with the GPF output achieves better accuracy than GPF, because the GPF estimation error can be deemed as linear Gaussian models and be removed by the linear smoother. The MA also ameliorate the GPF estimation, by reason that the target’s positions at neighborhood time-series are quite nearby.
- The drawbacks of GPF + MA and GPF + RTS are that they can only achieve a good accuracy when the smooth lag or window size is sufficiently large. As setting and , the performance of GPF + MA and GPF + RTS1 significantly degrades. Furthermore, it is well known that the improvement of MA does not go infinitely by increasing the window size.
5.4. Positioning Complexity
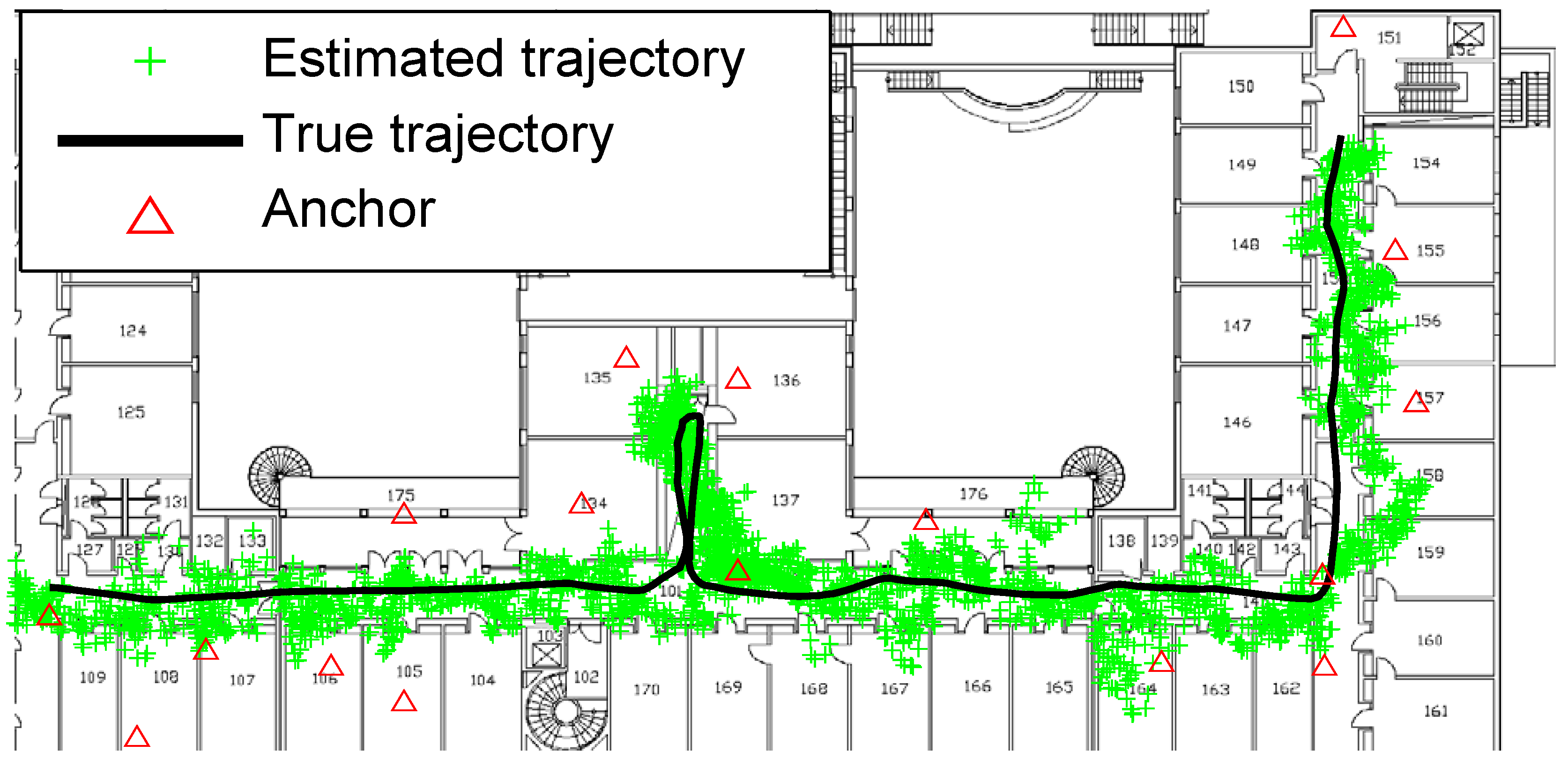
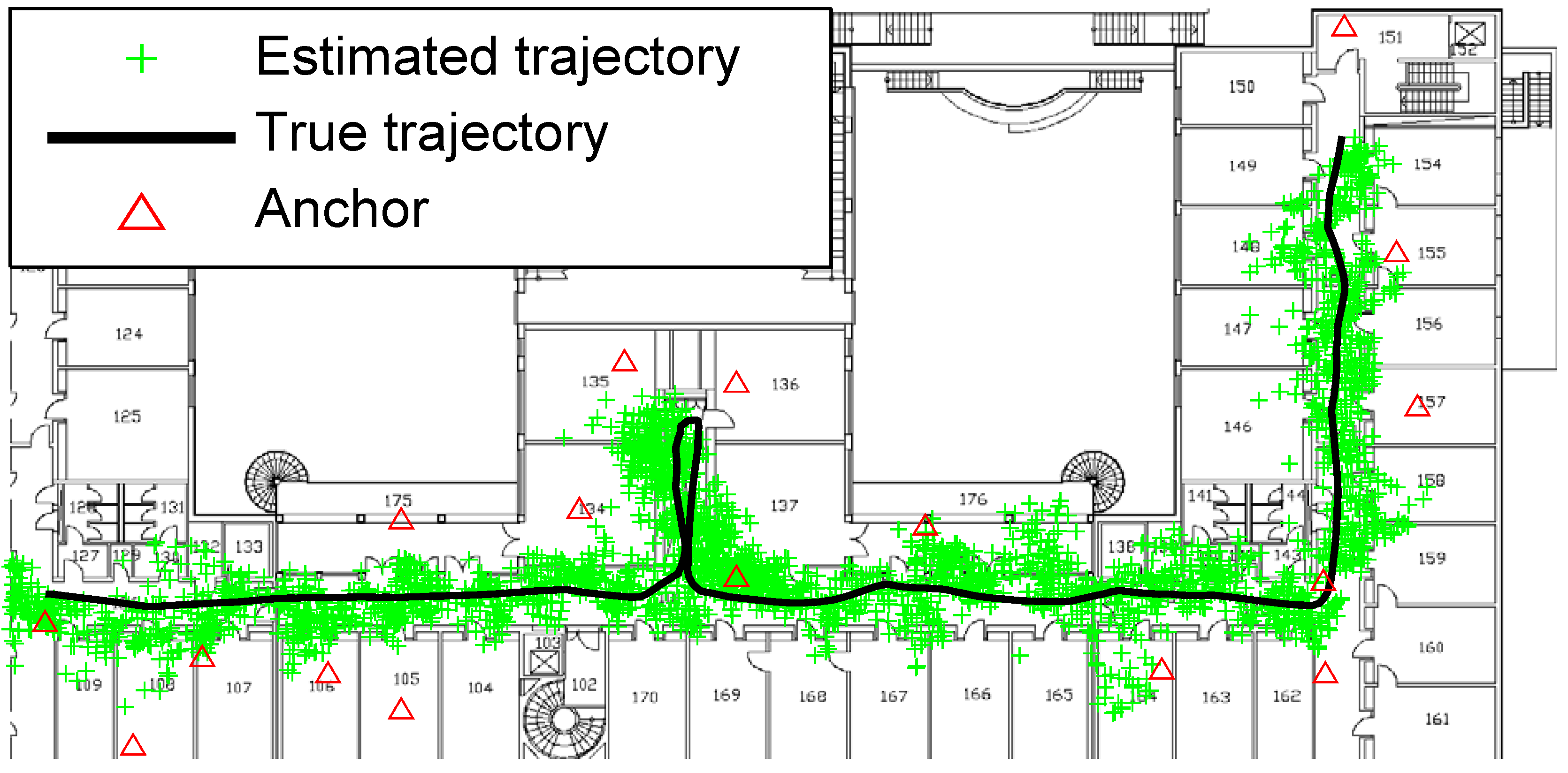
5.5. Tracking Behavior
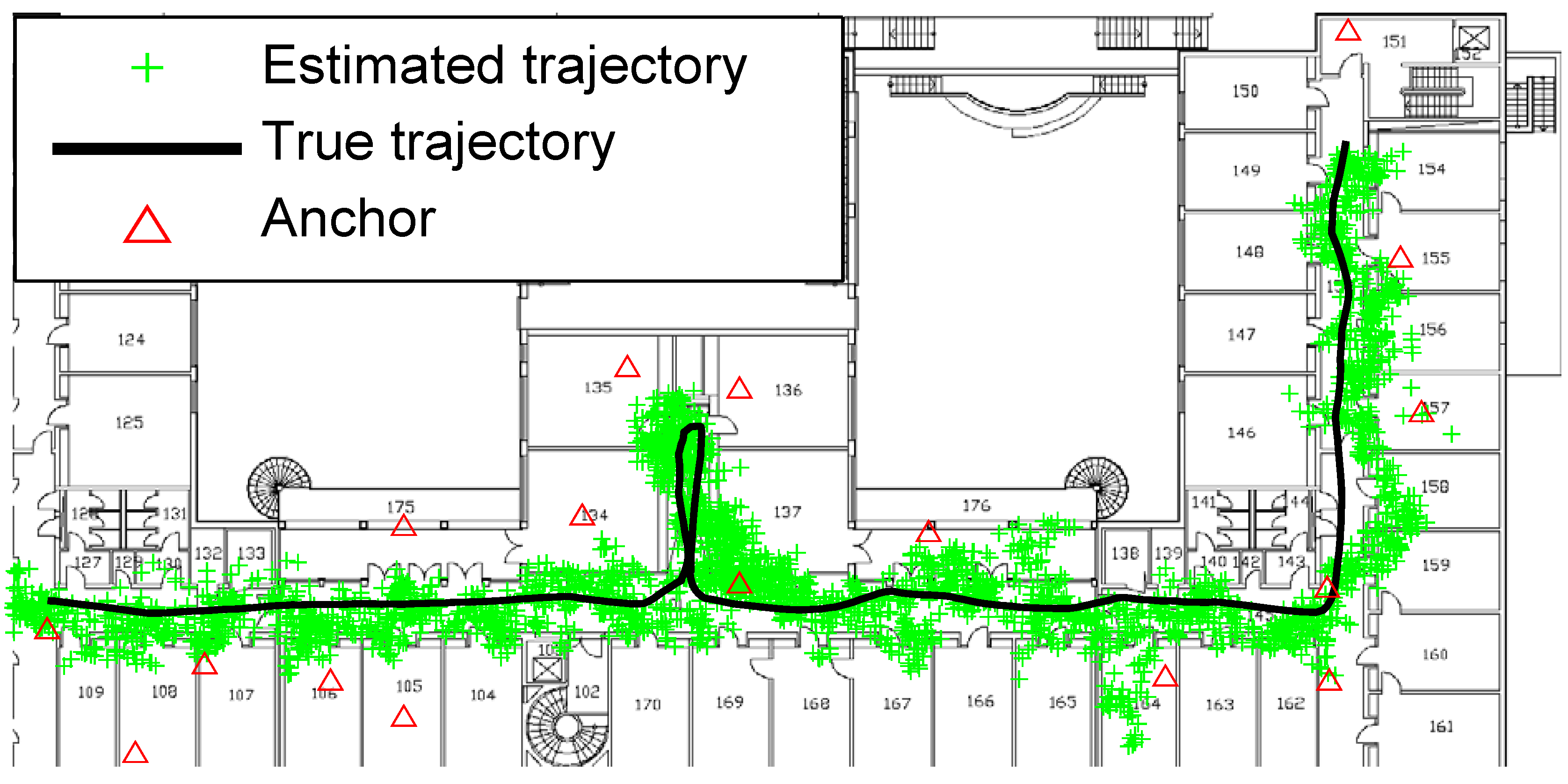
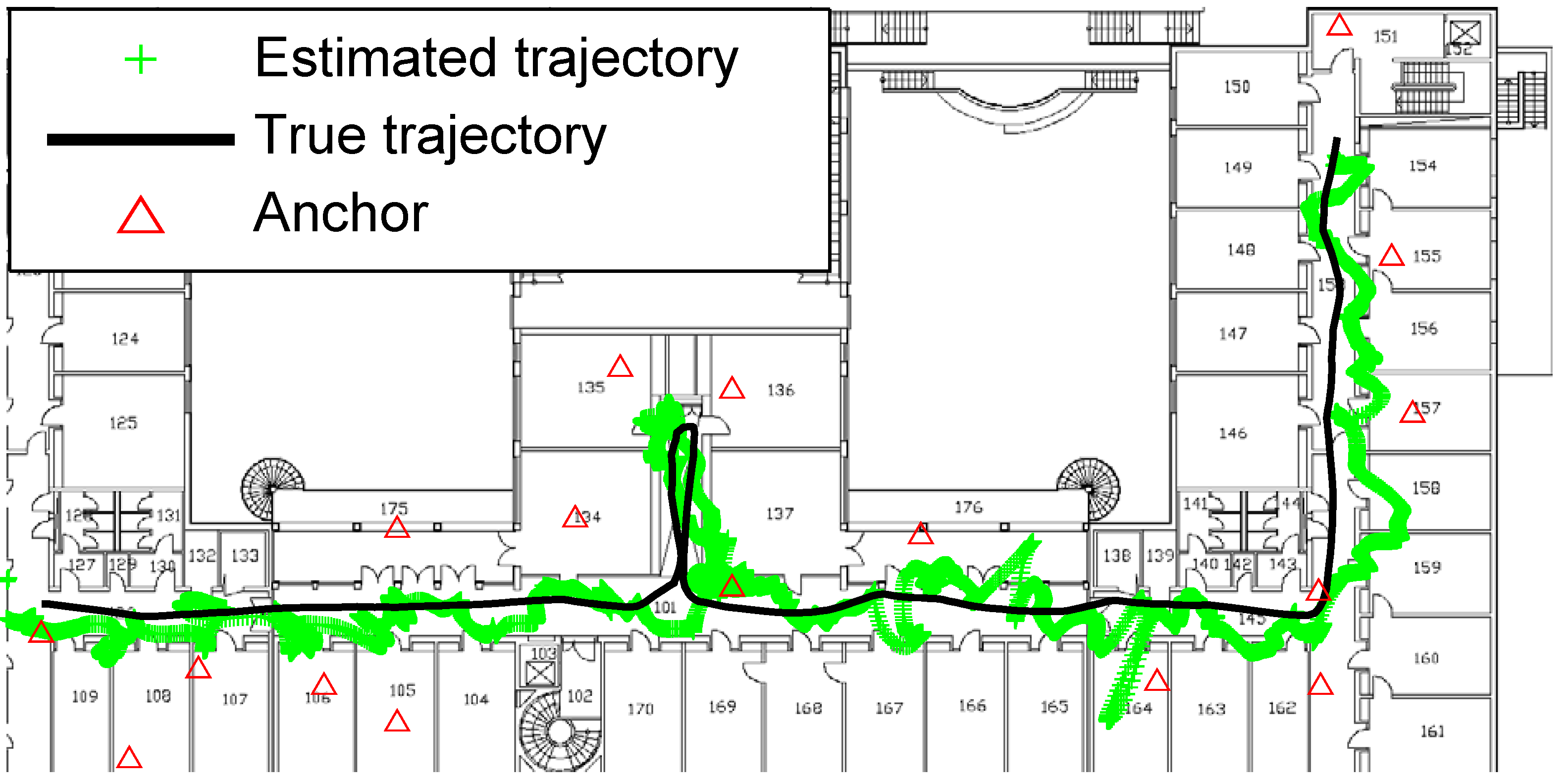
- Figure 2 shows the positioning behavior of GPF (filtering), which presents the highest deviation and divergence from the ground truth. Comparing with the smoothing methods, filtering is not qualified for indoor positioning in multipath scenarios.
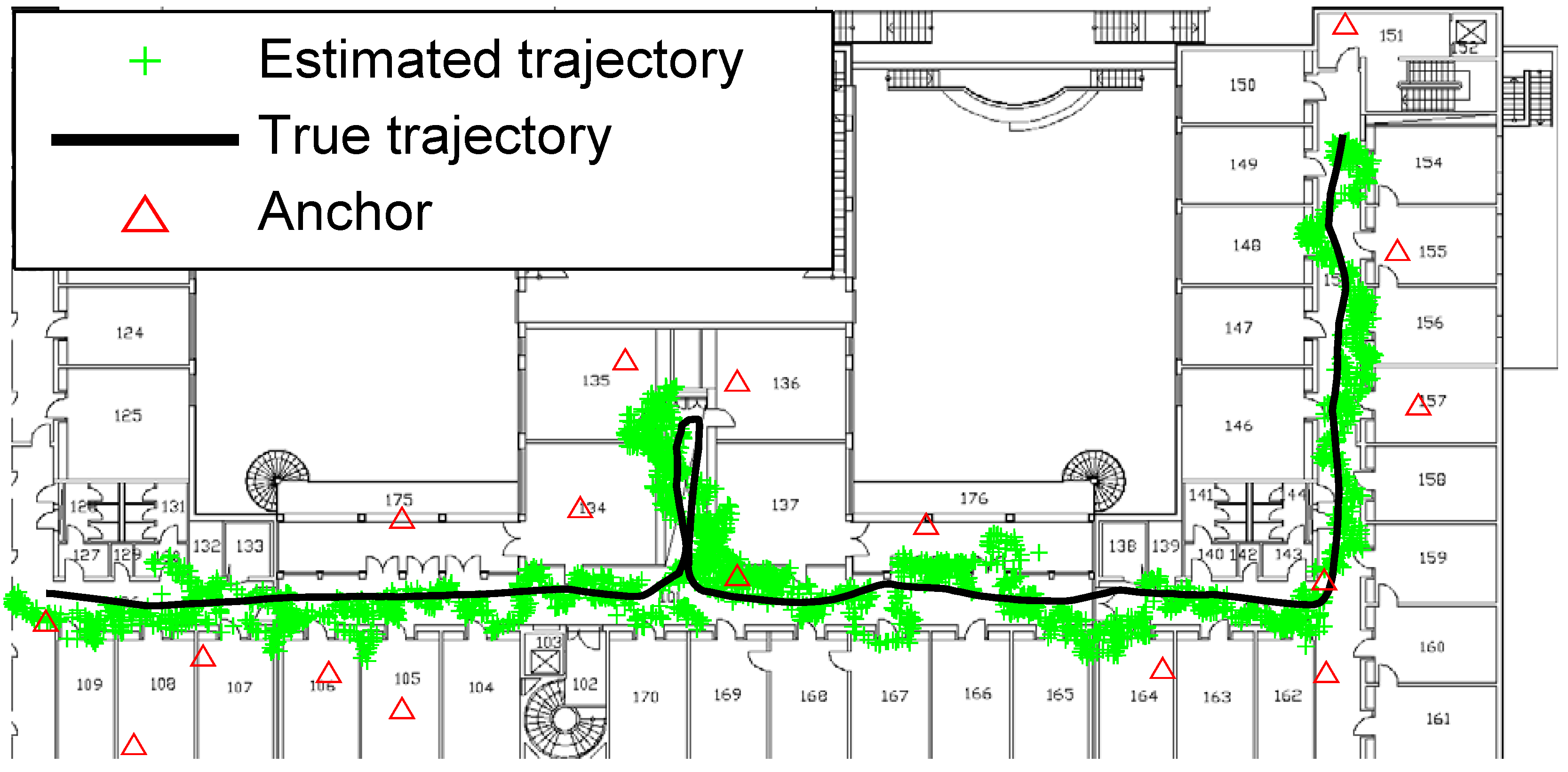
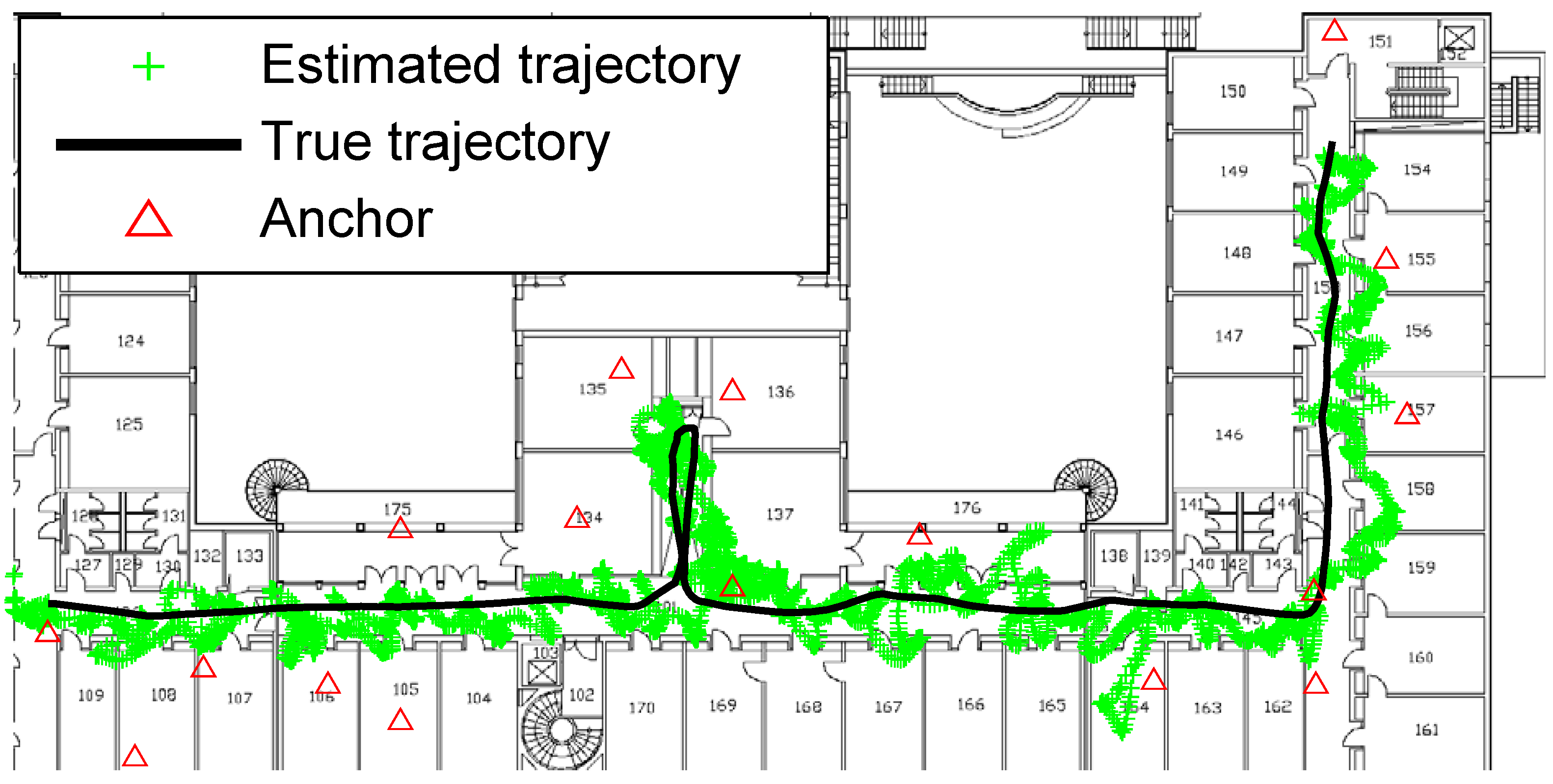
- Despite the spreading of the MPS estimation is slightly broader than that of GPF+RTS (Figure 7) and GPF+MA (Figure 6), it has a much smaller divergence to the ground truth trajectory (see Figure 5). Therefore, MPS performs the best tracking to the true trajectory, especially a better deviation and divergence when the ranging errors noise are larger (NLOS scenarios).
5.6. Tracking Smoothness
- Comparing with the filtering frame, the smoothing methods are particularly relevant for both reducing the uncertainty and smooth the representation for range-based positioning.
- The nonlinear smoothers (FFBS and TFS) are not effective, by reason that the smoothing density is not propagated into the state recursion.
- The MPS achieves much better accuracy and stability, as the smoothing density influences not only the position estimation but also the posterior recursion. In addition, its complexity is lower than the other nonlinear smoothers and remain robust against the NLOS (non-Gaussian) errors.
- The linear smoothing methods (GPF + MA and GPF + RTS) notably reduce the high-frequency fluctuation of the positioning errors, as removing the linear and Gaussian errors of the GPF estimation. However, they only work well when the smoothing lag or window size is sufficient. Moreover, they are undesirable when the target moves with a high velocity.
5.7. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| the discrete present time sequence | |
| the discrete future time sequence | |
| the number of reachable anchors at t | |
| the number of particle of MC approximations at t | |
| the hidden state of the two dimensions (2D) position at t | |
| the observed process (ranging measurements) at t | |
| Euclidean distance in 2D | |
| a Gaussian distribution with mean () and standard deviation () | |
| a set composed of N elements (form the 1th to Nth element) | |
| the estimate of the 2D position at t |
References
- Liu, F.; Li, X.; Wang, J.; Zhang, J. An Adaptive UWB/MEMS-IMU Complementary Kalman Filter for Indoor Location in NLOS Environment. Remote Sens. 2019, 11, 2628. [Google Scholar] [CrossRef]
- Li, X.; Deng, Z.D.; Rauchenstein, L.T.; Carlson, T.J. Contributed Review: Source-localization algorithms and applications using time of arrival and time difference of arrival measurements. Rev. Entific Instrum. 2016, 87, 921–960. [Google Scholar] [CrossRef]
- Zhang, S.; Yu, S.; Liu, C.; Liu, S. A miniature shoe-mounted orientation determination system for accurate indoor heading and trajectory tracking. Rev. Entific Instrum. 2016, 87. [Google Scholar] [CrossRef] [PubMed]
- Fox, V.; Hightower, J.; Liao, L.; Schulz, D.; Borriello, G. Bayesian filtering for location estimation. IEEE Pervasive Comput. 2003, 2, 24–33. [Google Scholar] [CrossRef]
- Burgard, W.; Derr, A.; Fox, D.; Cremers, A.B. Integrating global position estimation and position tracking for mobile robots: The Dynamic Markov Localization approach. In Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems, Innovations in Theory, Practice and Applications (Cat. No. 98CH36190), Victoria, BC, Canada, 17 October 1998; Volume 2, pp. 730–735. [Google Scholar]
- Alavi, B.; Pahlavan, K. Modeling of the TOA-based distance measurement error using UWB indoor radio measurements. IEEE Commun. Lett. 2006, 10, 275–277. [Google Scholar] [CrossRef]
- Yu, K.; Bengtsson, M.; Ottersten, B.; McNamara, D.; Karlsson, P.; Beach, M. Modeling of wide-band MIMO radio channels based on NLoS indoor measurements. IEEE Trans. Veh. Technol. 2004, 53, 655–665. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, Y.; Kyas, M. A non-parametric modeling of time-of-flight ranging error for indoor network localization. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 189–194. [Google Scholar]
- Nanopan 5375 RF Module Datasheet, Berlin, Germany. 2009. Available online: http://www.nanotron.com (accessed on 20 November 2020).
- Lpc2738 Datasheet, Eidhoven, Neterlands. Available online: http://www.nxp.com (accessed on 20 November 2020).
- Jennifer, H. Real-time compuall and Ogle. Transp. Res. Rec. J. Transp. Res. Board 2006, 1972, 141–150. [Google Scholar]
- Davison, A.J. Real-time simultaneous localisation and mapping with a single camera. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 1403–1410. [Google Scholar]
- Mirkin, L.; Tadmor, G. Fixed-lag smoothing as a constrained version of the fixed-interval case. In Proceedings of the IEEE 2004 American Control Conference, New York, NY, USA, 30 June–2 July 2004; Volume 5, pp. 4165–4170. [Google Scholar]
- Kitagawa, G. Monte Carlo filter and smoother for non-Gaussian nonlinear state space models. J. Comput. Graph. Stat. 1996, 5, 1–25. [Google Scholar]
- Yu, X.; Li, J. Optimal Filtering and a Smoothing Algorithm for a Singular System with a Complex Stochastic Uncertain Parameter Matrix. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 780–784. [Google Scholar] [CrossRef]
- Marchand, P.; Marmet, L. Binomial smoothing filter: A way to avoid some pitfalls of least-squares polynomial smoothing. Rev. Sci. Instrum. 1983, 54, 1034–1041. [Google Scholar] [CrossRef]
- Xiong, Y.; Zhang, Y.; Guo, X.; Wang, C.; Shen, C.; Li, J.; Tang, J.; Liu, J. Seamless global positioning system/inertial navigation system navigation method based on square-root cubature Kalman filter and random forest regression. Rev. Sci. Instrum. 2019, 90. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Feng, Q.; Li, S.; Hou, X.; Liu, S. Wavelet-Based Kalman Smoothing Method for Uncertain Parameters Processing: Applications in Oil Well-Testing Data Denoising and Prediction. Sensors 2020, 20, 4541. [Google Scholar] [CrossRef] [PubMed]
- Khalaf-Allah, M. Particle Filtering for Three-Dimensional TDoA-Based Positioning Using Four Anchor Nodes. Sensors 2020, 20, 4516. [Google Scholar] [CrossRef] [PubMed]
- Särkkä, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013; Volume 3. [Google Scholar]
- Weinert, H.L. Fixed Interval Smoothing for State Space Models; Kluwer Academic Pub: Dordrecht, The Netherlands, 2001; Volume 609. [Google Scholar]
- Doucet, A.; Johansen, A.M. A tutorial on particle filtering and smoothing: Fifteen years later. Handb. Nonlinear Filter. 2009, 12, 656–704. [Google Scholar]
- Ait-el Fquih, B.; Desbouvries, F. Exact and approximate Bayesian smoothing algorithms in partially observed Markov chains. In Proceedings of the 2006 IEEE Nonlinear Statistical Signal Processing Workshop, Cambridge, UK, 13–15 September 2006; pp. 148–151. [Google Scholar]
- Duong, T.T.; Chiang, K.W.; Le, D.T. On-line Smoothing and Error Modelling for Integration of GNSS and Visual Odometry. Sensors 2019, 19, 5259. [Google Scholar] [CrossRef] [PubMed]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef]
- Kitagawa, G. Non-Gaussian State-Space Modeling of Nonstationary Time Series. J. Am. Stat. Assoc. 1987, 82, 1032–1041. [Google Scholar]
- Fraser, D.; Potter, J. The optimum linear smoother as a combination of two optimum linear filters. IEEE Trans. Autom. Control 1969, 14, 387–390. [Google Scholar] [CrossRef]
- Yang, Y.; Wu, H.; Dai, P.; Zhang, B. One Time-step Particle Smoothing for Radio Range-based Indoor Position Tracking. Electron. Lett. 2020, 56, 360–362. [Google Scholar] [CrossRef]
- Movellan, J.; Tutorials, S.M. Discrete Time Kalman Filters and Smoothers; University of California San Diego: San Diego, CA, USA, 2011. [Google Scholar]
- Li, X.; Wang, Y.; Khoshelham, K. Comparative analysis of robust extended Kalman filter and incremental smoothing for UWB/PDR fusion positioning in NLOS environments. Acta Geod. Geophys. 2019, 54, 157–179. [Google Scholar] [CrossRef]
- Chen, X.; Xu, Y.; Li, Q. Application of Adaptive Extended Kalman Smoothing on INS/WSN Integration System for Mobile Robot Indoors. Math. Probl. Eng. 2013, 2013, 130508. [Google Scholar] [CrossRef]
- Hartikainen, J.; Solin, A.; Särkkä, S. Optimal filtering with Kalman filters and smoothers. In Department of Biomedica Engineering and Computational Sciences, Aalto University School of Science, 16th August; Department of Biomedica Engineering and Computational Sciences, Aalto University School of Science: Espoo, Finland, 2011. [Google Scholar]
- Kitagawa, G. Computational aspects of sequential Monte Carlo filter and smoother. Ann. Inst. Stat. Math. 2014, 66, 443–471. [Google Scholar] [CrossRef]
- Lindsten, F. Rao-Blackwellised Particle Methods for Inference and Identification; Linköping University Electronic Press: Linköping, Sweden, 2011. [Google Scholar]
- Fearnhead, P.; Wyncoll, D.; Tawn, J. A sequential smoothing algorithm with linear computational cost. Biometrika 2010, 97, 447–464. [Google Scholar] [CrossRef]
- Hide, C.; Moore, T. GPS and low cost INS integration for positioning in the urban environment. Proc. ION GNSS 2005, 1007–1015. [Google Scholar]
- Jun, J.; Guensler, R.; Ogle, J.H. Smoothing methods to minimize impact of Global Positioning System random error on travel distance, speed, and acceleration profile estimates. Transp. Res. Rec. J. Transp. Res. Board 2006, 1972, 141–150. [Google Scholar] [CrossRef]
- Cao, Y.; Mao, X.C. A Nonlinear Iterative Filtering-Smoothing Algorithm for GPS Positioning. J. Shanghai Jiaotong Univ. 2009, 7, 20. [Google Scholar]
- Liu, H.; Wang, Z.; Shan, R.; He, K.; Zhao, S. Research into the integrated navigation of a deep-sea towed vehicle with USBL/DVL and pressure gauge. Appl. Acoust. 2020, 159, 107052. [Google Scholar] [CrossRef]
- Nurminen, H.; Ristimaki, A.; Ali-Loytty, S.; Piché, R. Particle filter and smoother for indoor localization. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard, France, 28–31 October 2013; pp. 1–10. [Google Scholar]
- Achutegui, K.; Miguez, J.; Rodas, J.; Escudero, C.J. A multi-model sequential Monte Carlo methodology for indoor tracking: Algorithms and experimental results. Signal Process. 2012, 92, 2594–2613. [Google Scholar] [CrossRef]
- Sukreep, S.; Nukoolkit, C.; Mongkolnam, P. Indoor Position Detection Using Smartwatch and Beacons. Sens. Mater. 2020, 32, 455–473. [Google Scholar] [CrossRef]
- Radaelli, L.; Sabonis, D.; Lu, H.; Jensen, C.S. Identifying Typical Movements among Indoor Objects—Concepts and Empirical Study. In Proceedings of the IEEE International Conference on Mobile Data Management, Milan, Italy, 3–6 June 2013. [Google Scholar]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy Tarimala, K. Semi-Sequential Probabilistic Model for Indoor Localization Enhancement. IEEE Sens. J. 2020, 20, 6160–6169. [Google Scholar] [CrossRef]
- Widyawan. Learning Data Fusion for Indoor Localisation. Ph.D. Thesis, Cork Institute of Technology, Cork, Ireland, 2009. [Google Scholar]
- Alsindi, N.; Alavi, B.; Pahlavan, K. Measurement and modeling of ultrawideband TOA-based ranging in indoor multipath environments. IEEE Trans. Veh. Technol. 2009, 58, 1046–1058. [Google Scholar] [CrossRef]
- Andriyanov, N.; Vasiliev, K. Using Local Objects to Improve Estimation of Mobile Object Coordinates and Smoothing Trajectory of Movement by Autoregression with Multiple Roots. Adv. Intell. Syst. Comput. 2019. [Google Scholar]
- Kitagawa, G. The two-filter formula for smoothing and an implementation of the Gaussian-sum smoother. Ann. Inst. Stat. Math. 1994, 46, 605–623. [Google Scholar] [CrossRef]
- Kanagal, B.; Deshpande, A. Online filtering, smoothing and probabilistic modeling of streaming data. In Proceedings of the 2008 IEEE 24th International Conference on Data Engineering, Cancun, Mexico, 7–12 April 2008; pp. 1160–1169. [Google Scholar]
- Doucet, A.; Briers, M.; Sénécal, S. Efficient block sampling strategies for sequential Monte Carlo methods. J. Comput. Graph. Stat. 2006, 15, 693–711. [Google Scholar] [CrossRef]
- Fearnhead, P. Sequential Monte Carlo Methods in Filter Theory. Ph.D. Thesis, University of Oxford, Oxford, UK, 1998. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, UK, 2005; Volume 1. [Google Scholar]
- Briers, M.; Doucet, A.; Maskell, S. Smoothing algorithms for state–space models. Ann. Inst. Stat. Math. 2010, 62, 61–89. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Carter, C.K.; Kohn, R. On Gibbs sampling for state space models. Biometrika 1994, 81, 541–553. [Google Scholar] [CrossRef]
- Frühwirth-Schnatter, S. Data augmentation and dynamic linear models. J. Time Ser. Anal. 1994, 15, 183–202. [Google Scholar] [CrossRef]
- Creal, D. A survey of sequential Monte Carlo methods for economics and finance. Econom. Rev. 2012, 31, 245–296. [Google Scholar] [CrossRef]
- Aidala, V.J. Kalman filter behavior in bearings-only tracking applications. IEEE Trans. Aerosp. Electron. Syst. 1979, 29–39. [Google Scholar] [CrossRef]
- Haykin, S.S.; Haykin, S.S.; Haykin, S.S. Kalman Filtering and Neural Networks; Wiley Online Library: New York, NY, USA, 2001. [Google Scholar]
- Will, H.; Hillebrandt, T.; Kyas, M. The Geo-n Localization Algorithm. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Schmitt, S.; Will, H.; Aschenbrenner, B.; Hillebrandt, T.; Kyas, M. A reference system for indoor localization testbeds. In Proceedings of the IEEE International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, Australia, 13–15 November 2012; pp. 1–8. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Estimation Density | Calculation Cost |
|---|---|---|
| GPF [54] | calculate from | Low |
| FFBS [26] | calculate from | High |
| TFS [27] | calculate from | High |
| MPS | calculate from | Medium |
| GPF+RTS [25] | calculate and | Medium |
| GPF+MA [54] | calculate from and | High |
| Algorithms | MEAN | RMSE | MAX | Time Complexity | |
|---|---|---|---|---|---|
| GPF | 1.57 | 1.84 | 0.94 | 7.19 | |
| FFBS | 1.54 | 1.79 | 0.92 | 6.58 | |
| TFS | 1.57 | 1.83 | 0.94 | 6.77 | |
| MPS | 1.29 | 1.46 | 0.69 | 3.95 | |
| GPF + RTS | 1.37 | 1.58 | 0.78 | 5.86 | |
| GPF + RTS1 | 1.55 | 1.72 | 0.94 | 6.72 | |
| GPF + MA () | 1.42 | 1.65 | 0.84 | 6.29 | |
| GPF + MA () | 1.54 | 1.79 | 0.92 | 7.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Wang, M.; Qiao, Y.; Zhang, B.; Yang, H. Efficient Marginalized Particle Smoother for Indoor CSS–TOF Localization with Non-Gaussian Errors. Remote Sens. 2020, 12, 3838. https://doi.org/10.3390/rs12223838
Yang Y, Wang M, Qiao Y, Zhang B, Yang H. Efficient Marginalized Particle Smoother for Indoor CSS–TOF Localization with Non-Gaussian Errors. Remote Sensing. 2020; 12(22):3838. https://doi.org/10.3390/rs12223838
Chicago/Turabian StyleYang, Yuan, Manyi Wang, Yunxia Qiao, Bo Zhang, and Haoran Yang. 2020. "Efficient Marginalized Particle Smoother for Indoor CSS–TOF Localization with Non-Gaussian Errors" Remote Sensing 12, no. 22: 3838. https://doi.org/10.3390/rs12223838
APA StyleYang, Y., Wang, M., Qiao, Y., Zhang, B., & Yang, H. (2020). Efficient Marginalized Particle Smoother for Indoor CSS–TOF Localization with Non-Gaussian Errors. Remote Sensing, 12(22), 3838. https://doi.org/10.3390/rs12223838