Water Stress Estimation in Vineyards from Aerial SWIR and Multispectral UAV Data



Abstract
1. Introduction
2. Materials and Methods
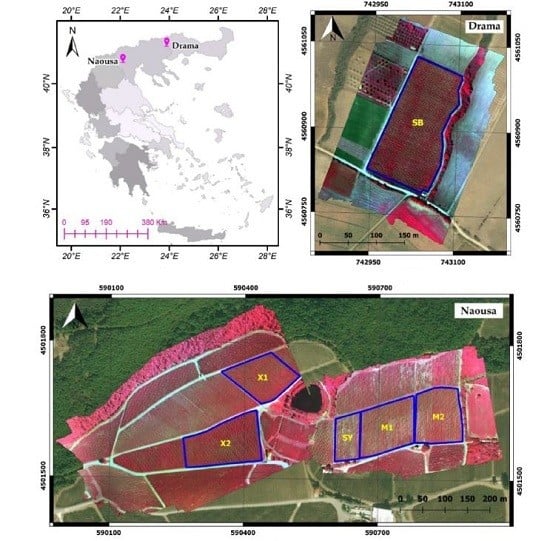
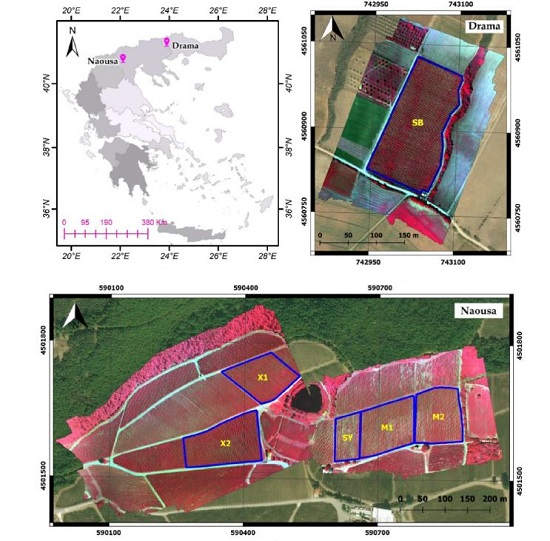
2.1. Study Areas, Vineyards and Vine Varieties
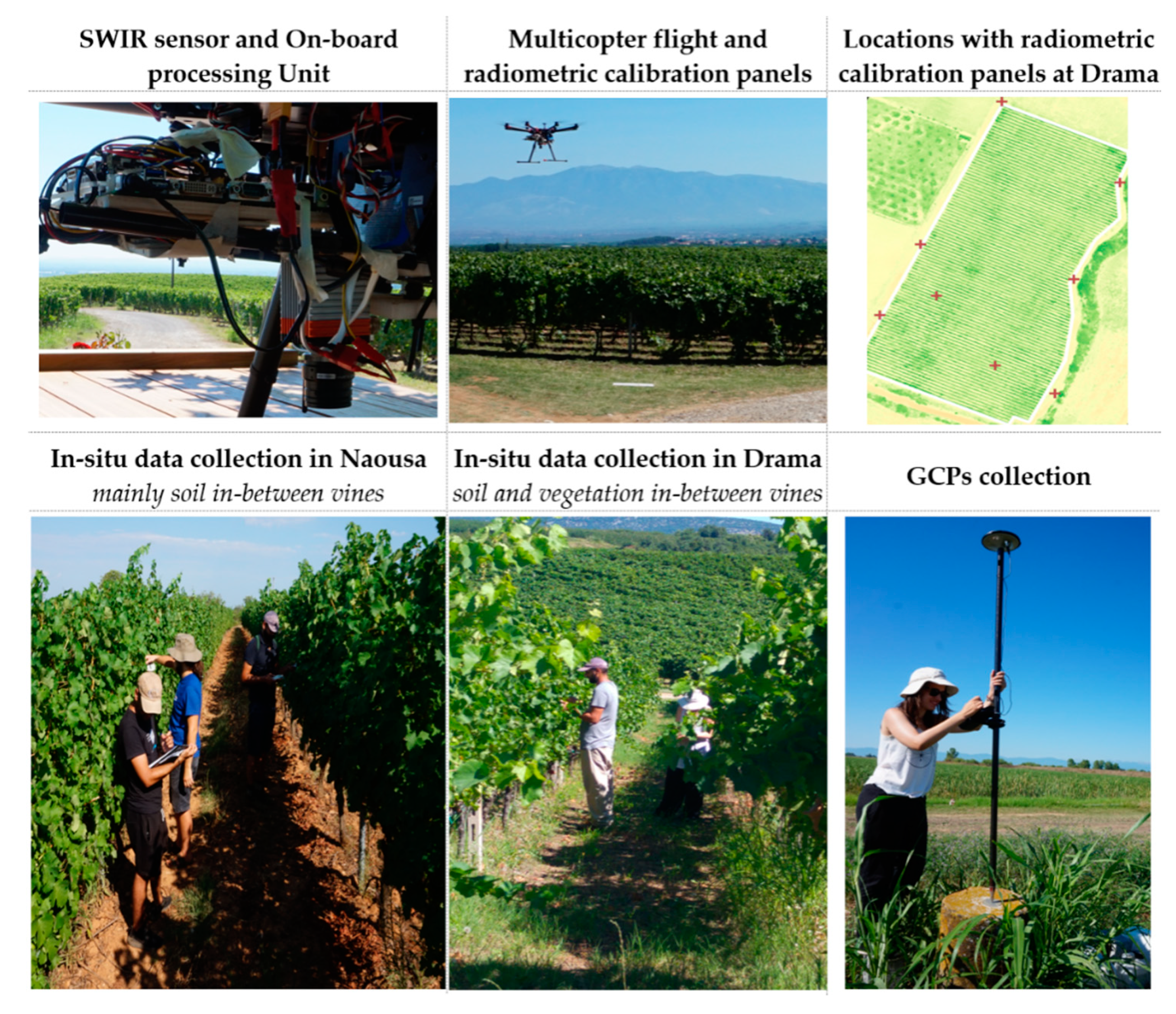
2.2. Field Campaigns
2.2.1. Leaf Porometer and GPS Field Measurements
2.2.2. UAV Imagery Acquisition
2.3. Methodology Framework
2.3.1. Co-Registration and Reflectance Calibration
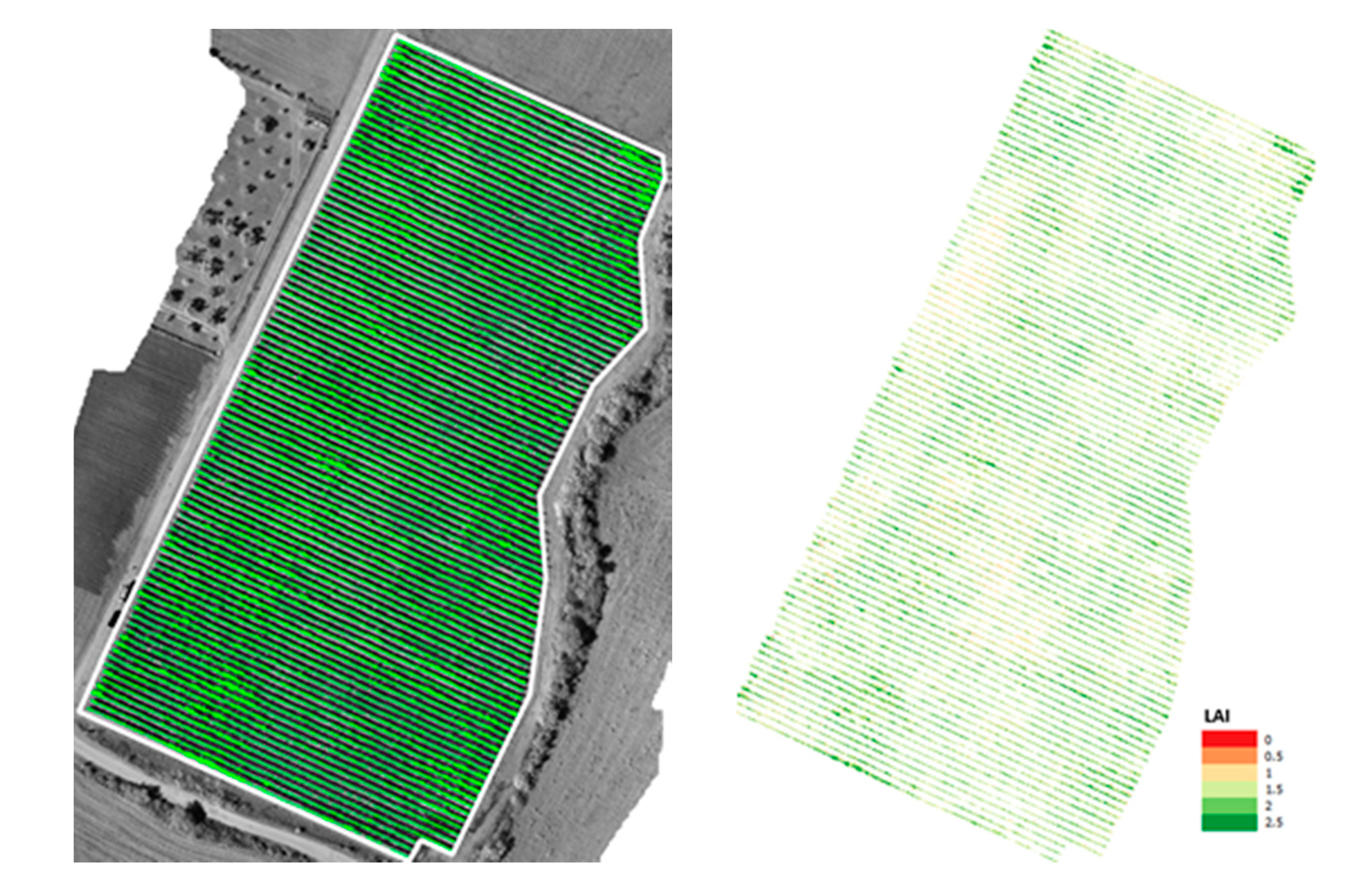
2.3.2. Spectral Indices and Canopy Extraction
2.3.3. Water Stress Modeling and Mapping
3. Experimental Results and Discussion
3.1. Regression Results
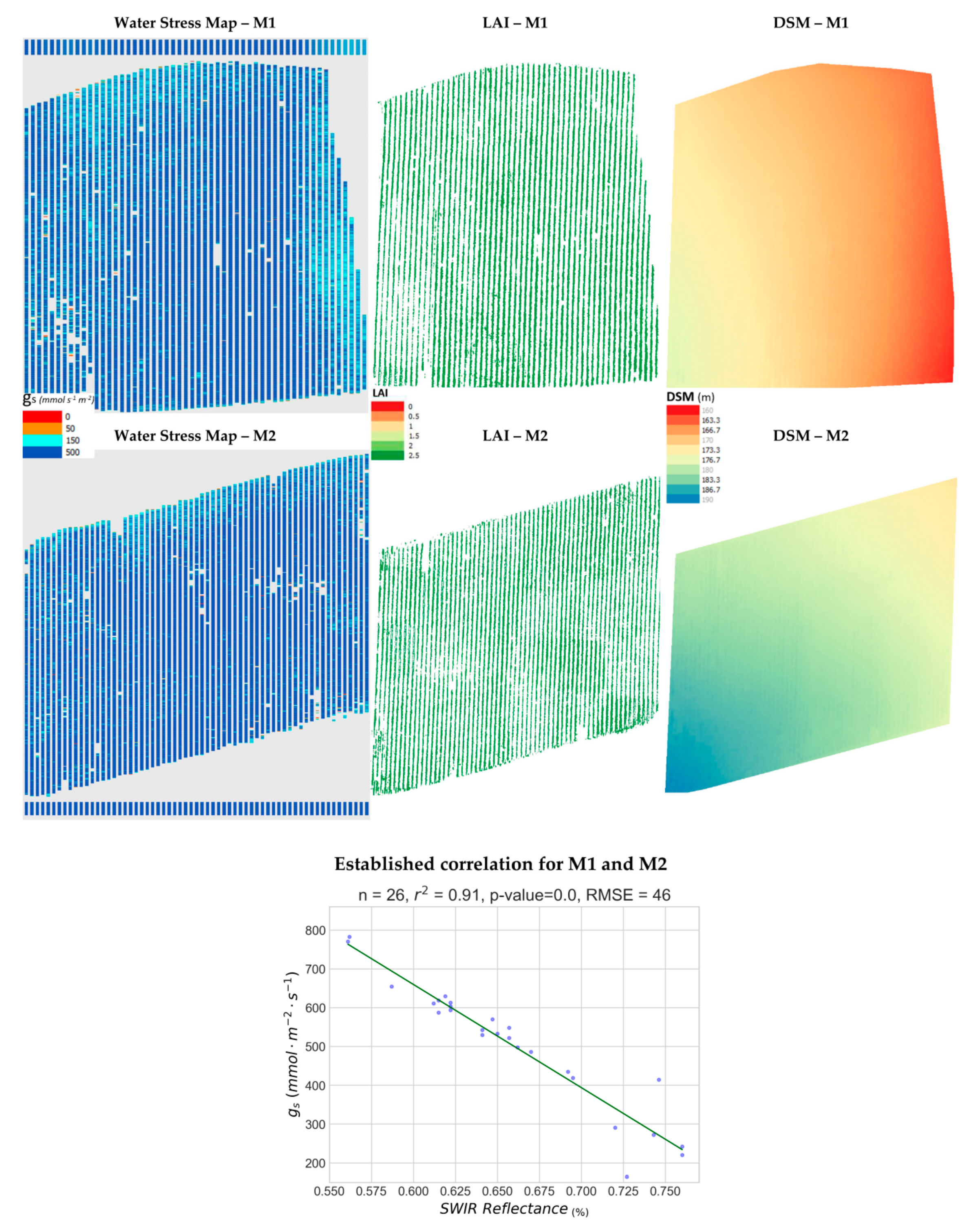
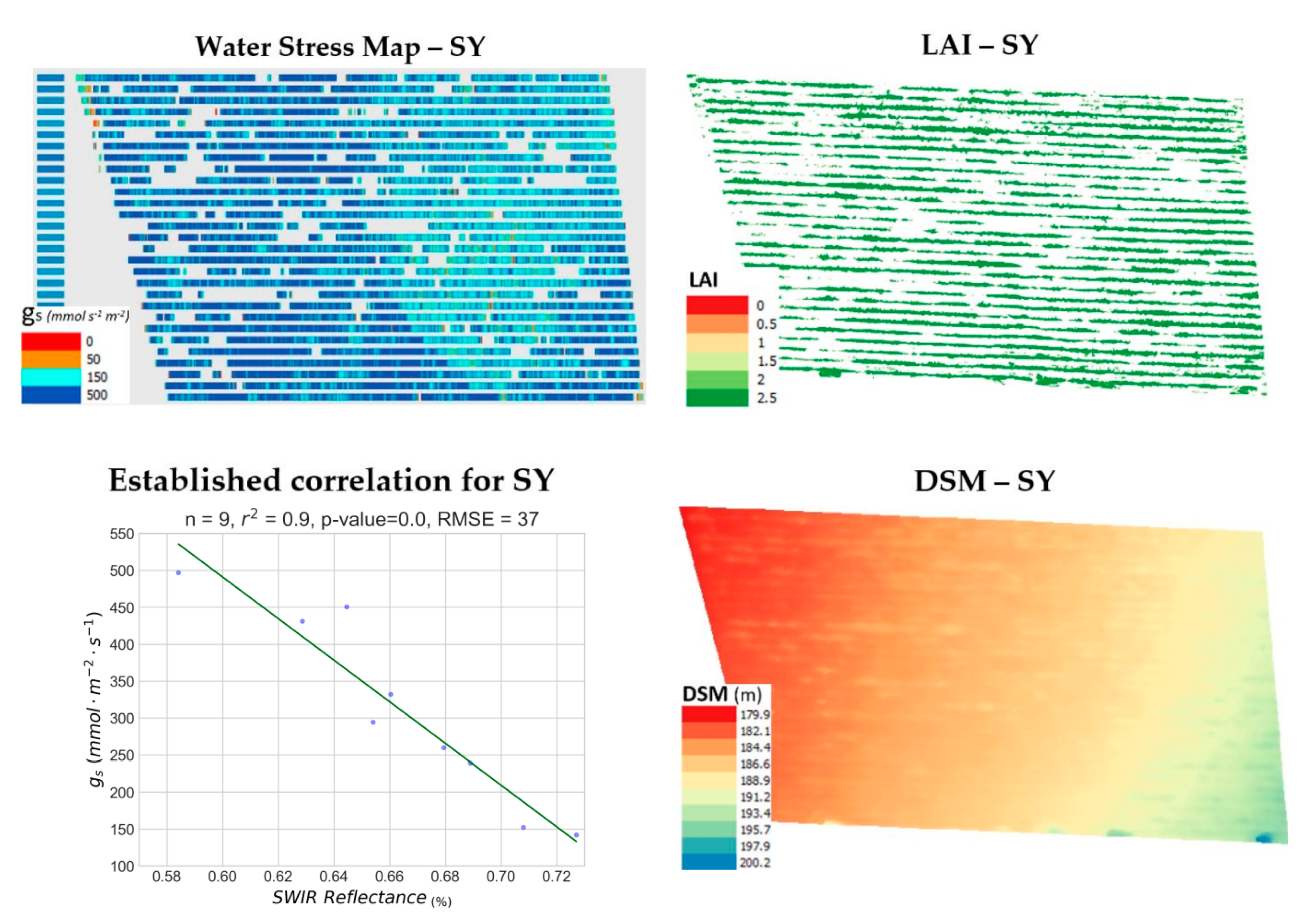
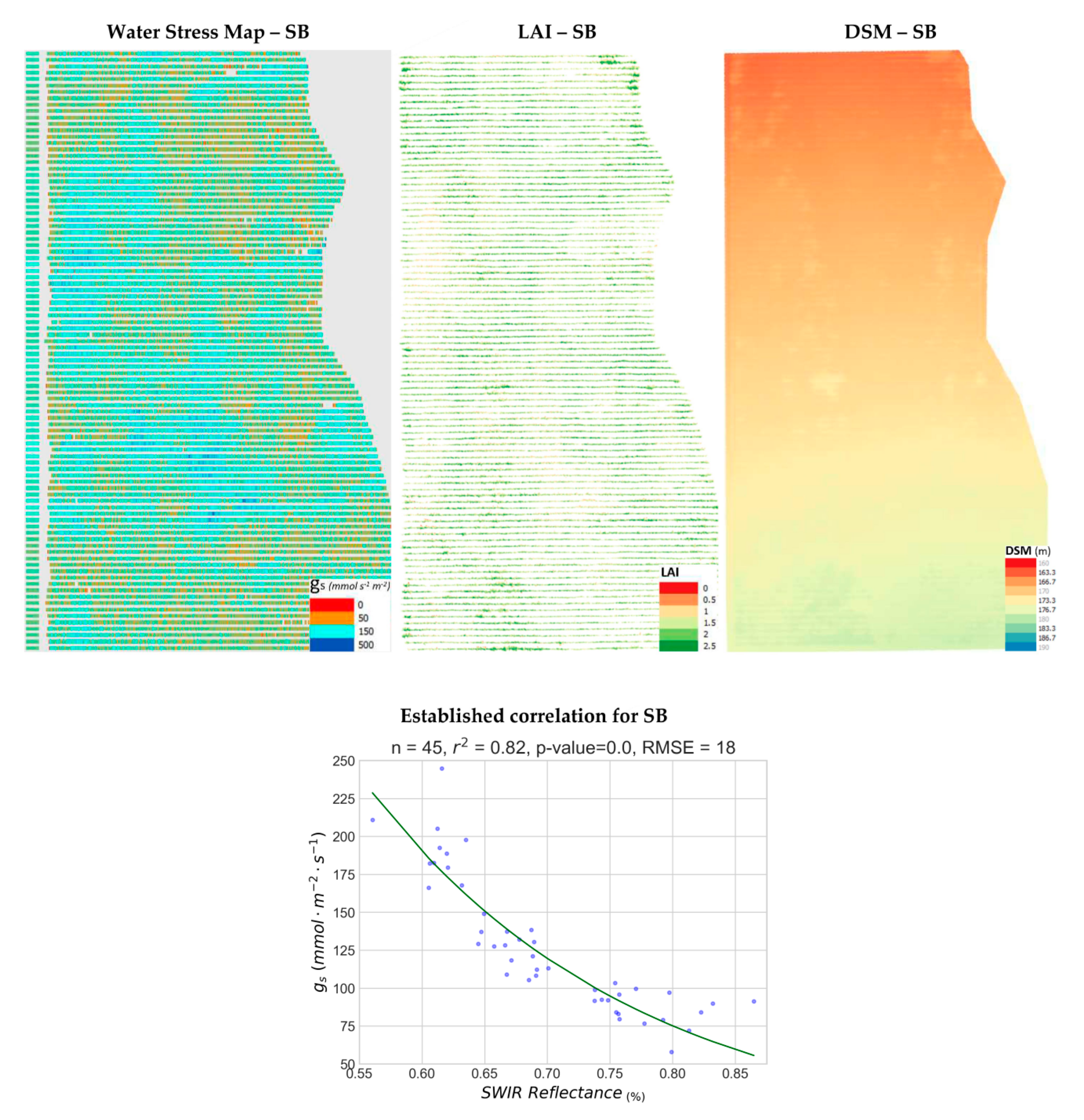
3.2. Estimated Water Stress per Variety
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day | Mean Temp | High | Time | Low | Time | Max RH | Min RH | Rain | Avg Wind Speed | High | Time | Dom Dir |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 30.1 | 40.6 | 16:30 | 19.8 | 06:00 | 87 | 27 | 0 | 3.6 | 17.7 | 18:10 | SE |
| 2 | 29.5 | 39.8 | 14:50 | 19.4 | 06:00 | 86 | 32 | 0 | 4.5 | 30.6 | 16:30 | ESE |
| 3 | 25.9 | 30.9 | 14:50 | 21.7 | 06:30 | 82 | 42 | 0.4 | 8.9 | 40.2 | 18:10 | NW |
| 4 | 25.4 | 31.1 | 16:50 | 20.5 | 04:30 | 67 | 36 | 0 | 10.5 | 40.2 | 02:50 | NW |
| 5 | 25.1 | 32.9 | 15:30 | 17.4 | 06:00 | 87 | 28 | 0 | 4.6 | 25.7 | 14:10 | SSW |
| 6 | 24.8 | 33.6 | 15:50 | 15.9 | 06:30 | 87 | 33 | 0 | 5.4 | 27.4 | 14:30 | ESE |
| 7 | 25.3 | 35.8 | 14:40 | 16.1 | 04:30 | 87 | 26 | 0 | 5.9 | 30.6 | 14:50 | ESE |
| 8 | 25.1 | 32.2 | 14:50 | 16.9 | 06:30 | 89 | 47 | 0 | 4.6 | 24.1 | 16:40 | SE |
| 9 | 27.5 | 37.8 | 16:10 | 18.2 | 06:20 | 89 | 27 | 0 | 4.2 | 27.4 | 17:40 | NNE |
| 10 | 27.1 | 35.4 | 15:40 | 20.2 | 06:30 | 83 | 36 | 1.2 | 7.2 | 46.7 | 18:20 | NW |
| 11 | 26.7 | 35.6 | 15:30 | 18.4 | 06:20 | 89 | 39 | 0 | 3.8 | 22.5 | 18:00 | SE |
| 12 | 28.1 | 40.3 | 16:20 | 19.5 | 06:50 | 86 | 22 | 0 | 5.1 | 29 | 19:20 | ESE |
| 13 | 29.3 | 39.7 | 15:40 | 20.1 | 05:20 | 86 | 27 | 0 | 6.2 | 30.6 | 15:50 | SW |
| 14 | 27.8 | 33.9 | 13:30 | 22.2 | 07:00 | 79 | 32 | 0 | 6.5 | 30.6 | 22:20 | S |
| 15 | 24.6 | 31.2 | 16:00 | 18.8 | 07:00 | 90 | 43 | 10 | 5.2 | 22.5 | 17:50 | ESE |
| 16 | 19.5 | 22.8 | 11:20 | 16.9 | 22:30 | 91 | 74 | 21.2 | 5.5 | 30.6 | 12:50 | NW |
| 17 | 18.9 | 22.2 | 14:00 | 16.7 | 01:40 | 91 | 61 | 8.6 | 7.6 | 35.4 | 11:10 | WNW |
| 18 | 21.3 | 27.7 | 15:40 | 15.9 | 06:40 | 90 | 47 | 0.2 | 3.7 | 20.9 | 17:20 | ENE |
| 19 | 23.4 | 32.5 | 16:10 | 13.9 | 06:20 | 90 | 32 | 0 | 4.5 | 27.4 | 17:40 | SSE |
| 20 | 24.6 | 33.1 | 15:40 | 16 | 06:40 | 89 | 31 | 0 | 5.1 | 27.4 | 17:00 | SE |
| 21 | 25.1 | 34.1 | 15:50 | 16.1 | 06:00 | 90 | 31 | 0 | 4.4 | 22.5 | 16:50 | S |
| 22 | 25.8 | 35.2 | 16:30 | 15.8 | 06:20 | 88 | 31 | 0 | 5.5 | 24.1 | 14:40 | SSE |
| 23 | 26.9 | 36.4 | 15:30 | 17.8 | 06:00 | 89 | 33 | 0 | 3.9 | 22.5 | 15:50 | ESE |
| 24 | 28 | 36.6 | 16:00 | 20.1 | 06:40 | 88 | 36 | 0 | 5 | 22.5 | 16:40 | SSE |
| 25 | 27.7 | 36.7 | 16:20 | 19.4 | 06:30 | 87 | 30 | 0 | 5.5 | 27.4 | 15:40 | SE |
| 26 | 27.3 | 34.8 | 16:20 | 19.7 | 06:40 | 87 | 32 | 0 | 6.2 | 29 | 18:40 | SW |
| 27 | 21.6 | 26.2 | 18:30 | 18.9 | 10:50 | 91 | 57 | 16.2 | 4.3 | 27.4 | 07:30 | SE |
| 28 | 23.6 | 31.7 | 17:20 | 15.6 | 05:30 | 92 | 32 | 0.2 | 7.8 | 32.2 | 15:50 | W |
| 29 | 24.9 | 34.5 | 17:10 | 14.9 | 06:40 | 90 | 27 | 0 | 7 | 32.2 | 16:00 | SW |
| 30 | 26.2 | 34.8 | 15:40 | 17.2 | 06:10 | 89 | 34 | 0 | 5.4 | 24.1 | 16:10 | ESE |
| 31 | 25.9 | 34.1 | 16:30 | 17.7 | 06:40 | 88 | 34 | 0 | 5.4 | 27.4 | 17:00 | SE |
| 25.6 | 40.6 | 1 | 13.9 | 19 | 87.2 | 36.1 | 58 | 5.6 | 46.7 | 10 | ESE |
| Day | Mean Temp | High | Time | Low | Time | Max RH | Min RH | Rain | Avg Wind Speed | High | Time | Dom Dir |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 31.4 | 36.8 | 17:20 | 26 | 06:10 | 53 | 30 | 0 | 1 | 25.7 | 03:00 | ENE |
| 2 | 31.9 | 37.4 | 16:00 | 27.2 | 06:10 | 51 | 27 | 0 | 2.3 | 30.6 | 00:40 | W |
| 3 | 26.1 | 30.8 | 00:00 | 21.9 | 23:40 | 48 | 34 | 0 | 10.3 | 49.9 | 18:40 | NW |
| 4 | 24.6 | 29.4 | 17:10 | 20.1 | 05:50 | 56 | 33 | 0 | 3.3 | 27.4 | 08:20 | NW |
| 5 | 24.4 | 30.1 | 16:40 | 19 | 04:40 | 65 | 33 | 0 | 1.4 | 20.9 | 19:10 | WNW |
| 6 | 25.8 | 31.2 | 18:00 | 20 | 06:30 | 60 | 30 | 0 | 1.7 | 17.7 | 22:40 | SSW |
| 7 | 28.7 | 34.9 | 17:10 | 21.6 | 03:30 | 76 | 21 | 0 | 3 | 27.4 | 12:40 | N |
| 8 | 26.6 | 32.8 | 17:40 | 20.8 | 06:50 | 68 | 40 | 0 | 1 | 14.5 | 15:20 | WNW |
| 9 | 28.1 | 34.7 | 15:10 | 22.3 | 04:10 | 78 | 32 | 0 | 0.8 | 24.1 | 22:00 | SSW |
| 10 | 28.4 | 33.2 | 15:40 | 24.1 | 05:00 | 64 | 42 | 0 | 1.2 | 17.7 | 13:50 | ESE |
| 11 | 28.1 | 33.6 | 15:50 | 22.5 | 06:40 | 68 | 46 | 0 | 1 | 12.9 | 13:20 | WNW |
| 12 | 29 | 35.7 | 17:30 | 22.5 | 06:30 | 70 | 29 | 0 | 0.9 | 22.5 | 22:20 | ENE |
| 13 | 30.3 | 36.1 | 17:10 | 24.4 | 06:40 | 55 | 27 | 0 | 1.6 | 27.4 | 01:00 | SW |
| 14 | 27 | 31.1 | 17:30 | 21.2 | 23:10 | 81 | 38 | 5.6 | 1.7 | 27.4 | 22:20 | SSW |
| 15 | 22.7 | 27.6 | 16:30 | 19.3 | 21:50 | 92 | 63 | 12 | 1.1 | 30.6 | 21:50 | WNW |
| 16 | 18.3 | 20.7 | 00:00 | 15.3 | 20:50 | 93 | 70 | 6.4 | 0.6 | 17.7 | 08:50 | SSW |
| 17 | 16.7 | 19 | 17:10 | 14.6 | 03:00 | 91 | 78 | 0.8 | 1.1 | 17.7 | 11:10 | NW |
| 18 | 22.3 | 27.1 | 17:10 | 17.7 | 03:50 | 83 | 45 | 0 | 0.5 | 19.3 | 14:10 | SW |
| 19 | 23.5 | 28.8 | 17:30 | 18.6 | 03:40 | 76 | 39 | 0 | 1.6 | 20.9 | 23:20 | SW |
| 20 | 24.6 | 29.7 | 16:40 | 20.5 | 06:50 | 66 | 47 | 0 | 2 | 29 | 01:00 | ENE |
| 21 | 25.9 | 31 | 17:00 | 21.1 | 03:40 | 72 | 41 | 0 | 1.1 | 16.1 | 05:40 | SW |
| 22 | 27 | 32.6 | 16:20 | 22.5 | 03:20 | 68 | 44 | 0 | 1.1 | 19.3 | 01:50 | ENE |
| 23 | 26.8 | 31.5 | 17:40 | 22.5 | 06:40 | 77 | 46 | 0 | 0.8 | 16.1 | 00:10 | ENE |
| 24 | 27.4 | 32.1 | 15:20 | 23.1 | 04:20 | 76 | 54 | 0 | 0.8 | 12.9 | 13:00 | ENE |
| 25 | 27.6 | 34.5 | 15:20 | 22.4 | 06:50 | 78 | 26 | 0 | 1.2 | 29 | 15:20 | ENE |
| 26 | 26.9 | 30.9 | 16:10 | 22.9 | 06:50 | 58 | 40 | 0 | 2.9 | 33.8 | 06:40 | SSW |
| 27 | 24.8 | 30.1 | 16:00 | 21.7 | 07:10 | 65 | 28 | 0 | 3.2 | 35.4 | 19:10 | WNW |
| 28 | 24.7 | 29.8 | 17:10 | 20 | 05:10 | 61 | 33 | 0 | 1.6 | 25.7 | 23:20 | SW |
| 29 | 27.2 | 32.8 | 15:20 | 22.2 | 05:20 | 46 | 27 | 0 | 1.8 | 22.5 | 02:10 | SW |
| 30 | 27.9 | 33.3 | 16:00 | 23.4 | 06:10 | 60 | 36 | 0 | 1.6 | 24.1 | 02:40 | SSW |
| 31 | 26.7 | 31.9 | 17:10 | 22.7 | 07:00 | 68 | 43 | 0 | 1 | 12.9 | 04:10 | WNW |
| 26.2 | 37.4 | 2 | 14.6 | 17 | 68.5 | 39.4 | 24.8 | 1.8 | 49.9 | 3 | ENE |



References
- Flörke, M.; Schneider, C.; McDonald, R.I. Water competition between cities and agriculture driven by climate change and urban growth. Nat. Sustain. 2018, 1, 51–58. [Google Scholar] [CrossRef]
- Keller, M. Environmental Constraints and Stress Physiology. In The Science of Grapevines: Anatomy and Physiology; Elsevier: Amsterdam, The Netherlands, 2010; pp. 227–310. ISBN 978-0-12-374881-2. [Google Scholar]
- Matese, A.; Baraldi, R.; Berton, A.; Cesaraccio, C.; Di Gennaro, S.; Duce, P.; Facini, O.; Mameli, M.; Piga, A.; Zaldei, A. Estimation of Water Stress in Grapevines Using Proximal and Remote Sensing Methods. Remote Sens. 2018, 10, 114. [Google Scholar] [CrossRef]
- Farquhar, G.D.; Sharkey, T.D. Stomatal Conductance and Photosynthesis. Annu. Rev. Plant Physiol. 1982, 33, 317–345. [Google Scholar] [CrossRef]
- Taiz, L.; Zeiger, E. Plant Physiology (Benjamin/Cummings Series in the Life Sciences); Benjamin/Cummings Pub. Co: Redwood City, CA, USA, 1991; ISBN 978-0-8053-0245-5. [Google Scholar]
- Shivers, S.W.; Roberts, D.A.; McFadden, J.P. Using paired thermal and hyperspectral aerial imagery to quantify land surface temperature variability and assess crop stress within California orchards. Remote Sens. Environ. 2019, 222, 215–231. [Google Scholar] [CrossRef]
- Liu, J.; Pattey, E.; Miller, J.R.; McNairn, H.; Smith, A.; Hu, B. Estimating crop stresses, aboveground dry biomass and yield of corn using multi-temporal optical data combined with a radiation use efficiency model. Remote Sens. Environ. 2010, 114, 1167–1177. [Google Scholar] [CrossRef]
- Kandylakis, Z.; Karantzalos, K. Precision viticulture from multitemporal, multispectral very high resolution satellite data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B8, 919–925. [Google Scholar] [CrossRef]
- Hunt, E.R.; Li, L.; Yilmaz, M.T.; Jackson, T.J. Comparison of vegetation water contents derived from shortwave-infrared and passive-microwave sensors over central Iowa. Remote Sens. Environ. 2011, 115, 2376–2383. [Google Scholar] [CrossRef]
- Javadian, M.; Behrangi, A.; Smith, W.K.; Fisher, J.B. Global Trends in Evapotranspiration Dominated by Increases across Large Cropland Regions. Remote Sens. 2020, 12, 1221. [Google Scholar] [CrossRef]
- He, M.; Kimball, J.S.; Yi, Y.; Running, S.W.; Guan, K.; Moreno, A.; Wu, X.; Maneta, M. Satellite data-driven modeling of field scale evapotranspiration in croplands using the MOD16 algorithm framework. Remote Sens. Environ. 2019, 230, 111201. [Google Scholar] [CrossRef]
- Olsen, J.L.; Stisen, S.; Proud, S.R.; Fensholt, R. Evaluating EO-based canopy water stress from seasonally detrended NDVI and SIWSI with modeled evapotranspiration in the Senegal River Basin. Remote Sens. Environ. 2015, 159, 57–69. [Google Scholar] [CrossRef]
- Acevedo-Opazo, C.; Tisseyre, B.; Guillaume, S.; Ojeda, H. The potential of high spatial resolution information to define within-vineyard zones related to vine water status. Precis. Agric. 2008, 9, 285–302. [Google Scholar] [CrossRef]
- Berni, J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and Narrowband Multispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Jackson, R.D.; Idso, S.B.; Reginato, R.J.; Pinter, P.J. Canopy temperature as a crop water stress indicator. Water Resour. Res. 1981, 17, 1133–1138. [Google Scholar] [CrossRef]
- Moller, M.; Alchanatis, V.; Cohen, Y.; Meron, M.; Tsipris, J.; Naor, A.; Ostrovsky, V.; Sprintsin, M.; Cohen, S. Use of thermal and visible imagery for estimating crop water status of irrigated grapevine. J. Exp. Bot. 2006, 58, 827–838. [Google Scholar] [CrossRef]
- Wang, S.; Garcia, M.; Ibrom, A.; Jakobsen, J.; Josef Köppl, C.; Mallick, K.; Looms, M.; Bauer-Gottwein, P. Mapping Root-Zone Soil Moisture Using a Temperature–Vegetation Triangle Approach with an Unmanned Aerial System: Incorporating Surface Roughness from Structure from Motion. Remote Sens. 2018, 10, 1978. [Google Scholar] [CrossRef]
- Ullah, S.; Skidmore, A.K.; Ramoelo, A.; Groen, T.A.; Naeem, M.; Ali, A. Retrieval of leaf water content spanning the visible to thermal infrared spectra. ISPRS J. Photogramm. Remote Sens. 2014, 93, 56–64. [Google Scholar] [CrossRef]
- Gerhards, M.; Rock, G.; Schlerf, M.; Udelhoven, T. Water stress detection in potato plants using leaf temperature, emissivity, and reflectance. Int. J. Appl. Earth Obs. Geoinformation 2016, 53, 27–39. [Google Scholar] [CrossRef]
- Susič, N.; Žibrat, U.; Širca, S.; Strajnar, P.; Razinger, J.; Knapič, M.; Vončina, A.; Urek, G.; Gerič Stare, B. Discrimination between abiotic and biotic drought stress in tomatoes using hyperspectral imaging. Sens. Actuators B Chem. 2018, 273, 842–852. [Google Scholar] [CrossRef]
- González-Fernández, A.B.; Rodríguez-Pérez, J.R.; Marcelo, V.; Valenciano, J.B. Using field spectrometry and a plant probe accessory to determine leaf water content in commercial vineyards. Agric. Water Manag. 2015, 156, 43–50. [Google Scholar] [CrossRef]
- Rapaport, T.; Hochberg, U.; Shoshany, M.; Karnieli, A.; Rachmilevitch, S. Combining leaf physiology, hyperspectral imaging and partial least squares-regression (PLS-R) for grapevine water status assessment. ISPRS J. Photogramm. Remote Sens. 2015, 109, 88–97. [Google Scholar] [CrossRef]
- Winkler, A.J. The Relation of Leaf Area and Climate to Vine Performance and Grape Quality. Am. J. Enol. Vitic. 1958, 9, 10. [Google Scholar]
- Kliewer, W.M.; Dokoozlian, N. Leaf Area/Crop Weight Ratios of Grapevines: Influence on Fruit Composition and Wine Quality. Am. J. Enol. Vitic. 2001, 56, 178–181. [Google Scholar]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correction Workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Karakizi, C.; Oikonomou, M.; Karantzalos, K. Vineyard Detection and Vine Variety Discrimination from Very High Resolution Satellite Data. Remote Sens. 2016, 8, 235. [Google Scholar] [CrossRef]
- Kalisperakis, I.; Stentoumis, Ch.; Grammatikopoulos, L.; Karantzalos, K. Leaf area index estimation in vineyards from UAV hyperspectral data, 2D image mosaics and 3D canopy surface models. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-1/W4, 299–303. [Google Scholar] [CrossRef]
- Johnson, L.F. Temporal stability of an NDVI-LAI relationship in a Napa Valley vineyard. Aust. J. Grape Wine Res. 2003, 9, 96–101. [Google Scholar] [CrossRef]
- Bellvert, J.; Zarco-Tejada, P.J.; Girona, J.; Fereres, E. Mapping crop water stress index in a ‘Pinot-noir’ vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle. Precis. Agric. 2014, 15, 361–376. [Google Scholar] [CrossRef]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Schultz, H.R. Differences in hydraulic architecture account for near-isohydric and anisohydric behaviour of two field-grown Vitis vinifera L. cultivars during drought. Plant Cell Environ. 2003, 26, 1393–1405. [Google Scholar] [CrossRef]
- Verdugo-Vásquez, N.; Acevedo-Opazo, C.; Valdés-Gómez, H.; Ingram, B.; de García Cortázar, I.; Tisseyre, B. Temporal stability of within-field variability for total soluble solids in four irrigated grapevines cultivars growing under semi-arid conditions. In Precision Agriculture ’15; Stafford, J.V., Ed.; Wageningen Academic Publishers: Wageningen, The Netherlands, 2015; pp. 471–478. ISBN 978-90-8686-267-2. [Google Scholar]












| Experiments/Established/Correlations (abbr.) | # of In-Situ Data | Linear Model (One Pixel) | Exponential Model (One Pixel) | Linear Model (9 Pixels) | Exponential Model (9 Pixels) |
|---|---|---|---|---|---|
| r2 | |||||
| (M1) Merlot #1 | 12 | 0.91 | 0.91 | 0.66 | 0.57 |
| (M2) Merlot #2 | 14 | 0.95 | 0.93 | 0.86 | 0.75 |
| (M1&M2) Merlot | 26 | 0.91 | 0.89 | 0.74 | 0.60 |
| (SB) Sauvignon Blanc | 45 | 0.75 | 0.82 | 0.66 | 0.76 |
| (SY) Syrah | 9 | 0.90 | 0.83 | 0.79 | 0.77 |
| (X1) Xinomavro #1 | 9 | 0.83 | 0.83 | 0.60 | 0.58 |
| (X2) Xinomavro #2 | 11 | 0.96 | 0.92 | 0.85 | 0.70 |
| (X1&X2) Xinomavro | 20 | 0.66 | 0.61 | 0.38 | 0.38 |
| Mean gs mmol m−2 s−1 | RMSE mmol m−2 s−1 (NRMSE) | ||||
| (M1) Merlot #1 | 524 | 36 (0.07) | 38 (0.07) | 70 (0.13) | 66 (0.13) |
| (M2) Merlot #2 | 490 | 40 (0.08) | 63 (0.13) | 68 (0.14) | 86 (0.18) |
| (M1&M2) Merlot | 506 | 46 (0.09) | 63 (0.12) | 81 (0.16) | 86 (0.17) |
| (SB) Sauvignon Blanc | 126 | 22 (0.17) | 18 (0.14) | 29 (0.23) | 24 (0.19) |
| (SY) Syrah | 311 | 37 (0.12) | 64 (0.21) | 56 (0.18) | 63 (0.20) |
| (X1) Xinomavro #1 | 131 | 18 (0.14) | 19 (0.15) | 28 (0.21) | 27 (0.21) |
| (X2) Xinomavro #2 | 234 | 21 (0.09) | 38 (0.16) | 39 (0.17) | 49 (0.21) |
| (X1&X2) Xinomavro | 188 | 56 (0.30) | 62 (0.33) | 75 (0.40) | 81 (0.43) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kandylakis, Z.; Falagas, A.; Karakizi, C.; Karantzalos, K. Water Stress Estimation in Vineyards from Aerial SWIR and Multispectral UAV Data. Remote Sens. 2020, 12, 2499. https://doi.org/10.3390/rs12152499
Kandylakis Z, Falagas A, Karakizi C, Karantzalos K. Water Stress Estimation in Vineyards from Aerial SWIR and Multispectral UAV Data. Remote Sensing. 2020; 12(15):2499. https://doi.org/10.3390/rs12152499
Chicago/Turabian StyleKandylakis, Zacharias, Alexandros Falagas, Christina Karakizi, and Konstantinos Karantzalos. 2020. "Water Stress Estimation in Vineyards from Aerial SWIR and Multispectral UAV Data" Remote Sensing 12, no. 15: 2499. https://doi.org/10.3390/rs12152499
APA StyleKandylakis, Z., Falagas, A., Karakizi, C., & Karantzalos, K. (2020). Water Stress Estimation in Vineyards from Aerial SWIR and Multispectral UAV Data. Remote Sensing, 12(15), 2499. https://doi.org/10.3390/rs12152499