Unmanned Aerial Systems (UAS)-Based Methods for Solar Induced Chlorophyll Fluorescence (SIF) Retrieval with Non-Imaging Spectrometers: State of the Art

 , ,
, ,  , ,
, ,  , ,
, ,  , and
, and
Abstract
1. Introduction
2. Previous Efforts with UAS-Mounted Spectroradiometers for Reflectance Measurements
- (a)
- Burkart et al. [38] calculated reflectance based on synchronized measurements from two, one on-board and one on-ground, equally configured and cross calibrated STS micro-spectroradiometers (STS Series Spectrometers, Ocean Optics, Dunedin, Florida, USA) under the same environmental conditions. In this case, the radiometric calibration was performed indirectly from comparisons between STS and an Analytical Spectral Device (ASD) FieldSpec 4 (Analytical Spectral Devices, Inc., Boulder, Colorado, USA) calibrated spectroradiometer. Results proved the high precision of the reasonably priced STS measurements, notwithstanding a second order effect was detected influencing NIR readings. The 338–412 nm stray light interfered with bands within 676–823 nm, especially in the O2-A band. Consequently, the authors suggested additional studies for STS-based SIF retrieval. Current investigations are focused on the use of STS micro-spectroradiometers, not for SIF measurements, but for the assessment of reflectance factors as a complementary (canopy scale) data source to leaf level spectral information acquired with an ASD spectroradiometer. The system, from the Environmental Remote Sensing and Spectroscopy Laboratory (SpecLab), included a real time optimization of the integration time, seeking to maximize signal independently of target brightness or changes in illumination. This feature was relevant considering the low signal-to-noise ratio of the STS spectrometers, and the variability of surface reflectance factors in heterogeneous Mediterranean tree-grass ecosystems, where bright dry grass is mixed with dark tree canopies during summer [39].
- (b)
- Garzonio et al. [40] realized downwelling irradiance measurements with a USB4000 spectroradiometer (Ocean Optics, Dunedin, Florida, USA) through linear interpolation of two measurements of the radiance reflected by a reference tarp, and the use of a second on-ground hand held ASD FieldSpec measuring a Lambertian surface (Spectralon®) as reference (both spectroradiometers were synchronized). The robust radiometric and spectral calibration of the instruments, despite not being temperature stabilized (e.g., the STS and the USB4000), permitted accurate radiance measurements especially at O2-A. Both approaches present a relative root mean square error lower than 10% compared with ground information.
3. Currently Operational UAS Systems for SIF Retrieval
3.1. “Piccolo-Doppio”—A Dual-Field of View (FOV) Dual Spectrometer System
- (i)
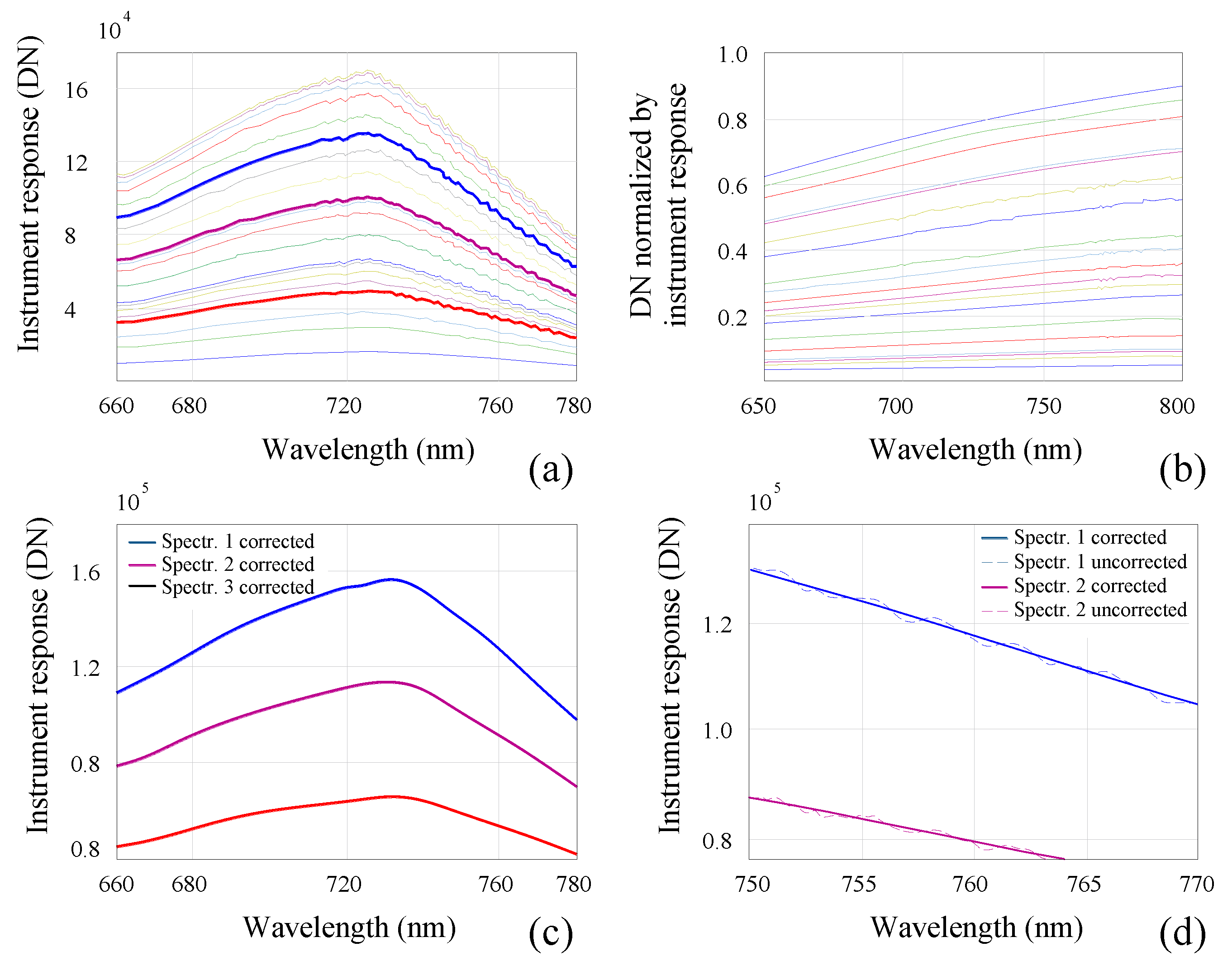
- ‘By reference’: employing etaloning correction factors obtained from the division between the measured spectra of a calibrated light source and the known outputs per wavelength. The factors were applied to tungsten halogen readings at 20 levels of intensity (Figure 2a). The instrument response was then convolved with the respective spectral measurements to obtain the spectrum with the etaloning effect corrected. A variance of ±0.7% was detected (Figure 2b) and linked to the instrument non-perfect linear response.
- (ii)
- ‘By curve-fitting and residual interpolation’: using correction coefficients obtained from the rounded residuals between actual and spline-smoothed reflectance at 17 levels of intensity of a tungsten halogen light source. A validation test performed with three additional levels of intensity demonstrated the efficiency of the method by reproducing a smooth spectrum (Figure 2c). Furthermore, the residuals of measured wavelengths were interpolated to enable the etaloning correction at unassessed ranges. The results obtained, differed by no more than 10 raw digital counts (DN) from the etaloning corrected spectra (Figure 2d), hence demonstrating higher performance in the correction of the effect compared with the ‘referencing’ method.
3.2. “AirSIF”—A UAS-Based Spectroradiometer
3.3. “AirFloX” on Board of the “FloXPlane”—Atmospheric Interference on SIF Retrieval Across a Multiple Kilometer Air Column
3.4. Summary of the UAS-Based Methods Presented
4. Remaining Challenges and Open Research Questions
5. Conclusions
- (i)
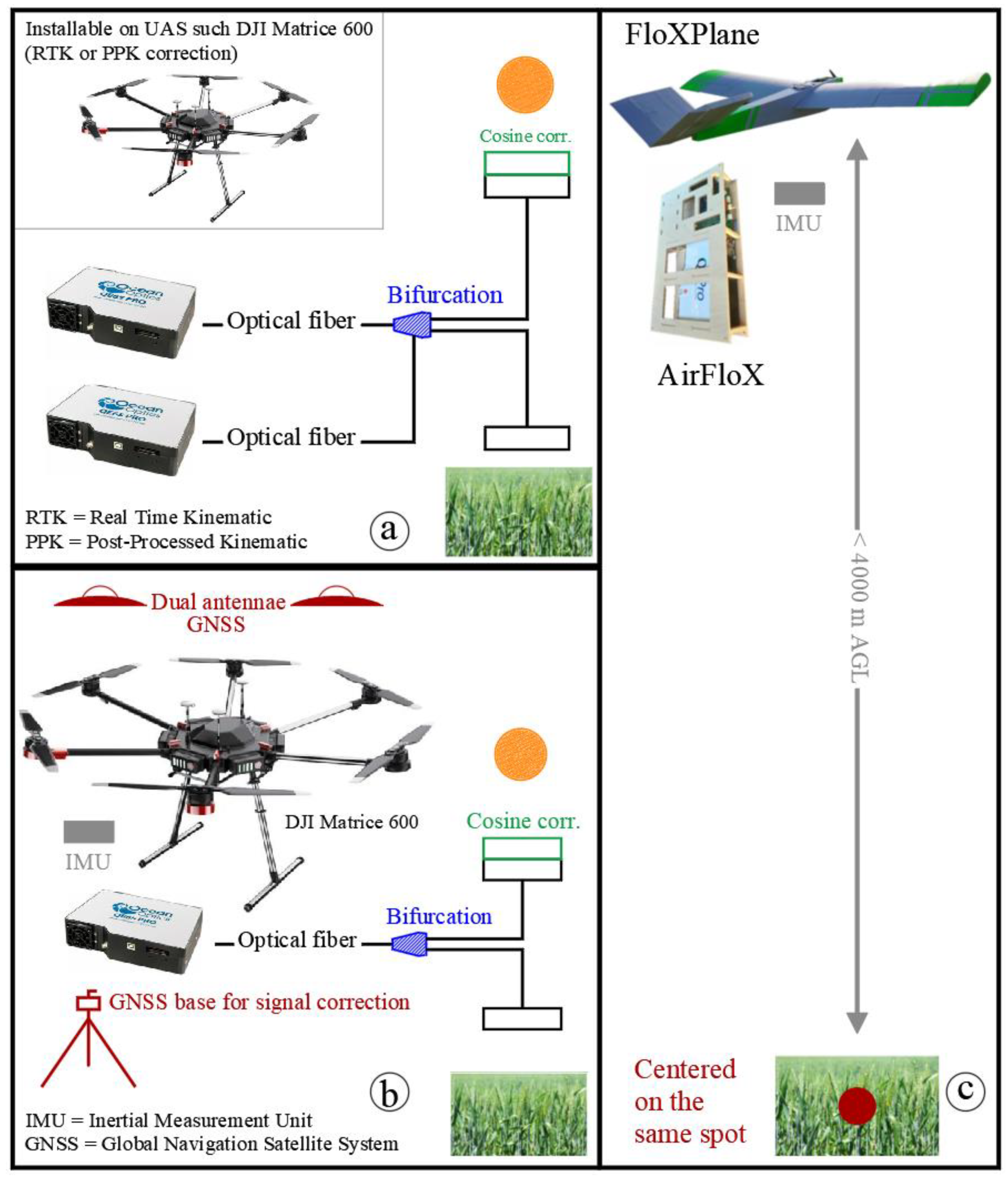
- The optical path bifurcation presented in the Piccolo-Doppio system for nearly simultaneous upwelling and downwelling measurements with two spectroradiometers, allowing synchronized VNIR and SIF measurements.
- (ii)
- The implementation of a dual GNSS antenna system and IMU placed in the correct position, alongside the appropriate flight and sensor configurations reported in the AirSIF project, for the accurate pose characterization and footprint geolocation accuracies.
- (iii)
- The development of the FloXPlane as a fixed wing UAS for very high altitude measurements, which will provide crucial information to understand the impact of large atmosphere columns on the retrieval of SIF.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AGL | Above ground level |
| ASD | Analytical spectral device |
| BRDF | Bidirectional reflectance distribution function |
| ChlF | Chlorophyll fluorescence |
| DN | Raw digital counts |
| ESA | European Space Agency |
| FLD | Fraunhofer Lines Depth |
| FLEX | FLuorescence EXplorer |
| Flox | Fluorescence box |
| FOV | Field of view |
| FWHM | Full Width at Half Maximum |
| GNSS | Global navigation satellite system |
| GOME-2 | Global Ozone Monitoring Experiment–2 |
| GOSAT | Gases Observing Satellite |
| GPP | Gross primary production |
| IMU | Inertial measurement unit |
| JSON | JavaScript Object Notation |
| LIFT | Light induced fluorescence |
| NDVI | Normalized difference vegetation index |
| NIR | Near infrared |
| O2-A | Oxygen-A band |
| O2-B | Oxygen-B band |
| OCO-2 | Orbiting Carbon Observatory-2 |
| PRI | Photochemical reflectance index |
| RGB | red-green-blue |
| SCIMACHY | Scanning Imaging Absorption Spectrometer for Atmospheric Cartography |
| SFM | Spectral fitting method |
| SIF | Solar induced chlorophyll fluorescence |
| SNR | Signal to noise ratio |
| SpecLab | Environmental Remote Sensing and Spectroscopy Laboratory |
| SVD | Singular vector decomposition |
| TanSat | Tropospheric Monitoring Instrument (TROPOMI) and the Exploratory Satellite for Atmospheric CO2 |
| TRuStEE | Training on Remote Sensing for Ecosystem Modelling |
| UAS | Unmanned aerial systems |
| VNIR | Visible and near-infrared |
References
- Kalaji, H.M.; Schansker, G.; Brestic, M.; Bussotti, F.; Calatayud, A.; Ferroni, L.; Goltsev, V.; Guidi, L.; Jajoo, A.; Li, P.; et al. Frequently asked questions about chlorophyll fluorescence, the sequel. Photosynth. Res. 2017, 132, 13–66. [Google Scholar] [CrossRef] [PubMed]
- Meroni, M.; Rossini, M.; Guanter, L.; Alonso, L.; Rascher, U.; Colombo, R.; Moreno, J. Remote sensing of solar-induced chlorophyll fluorescence: Review of methods and applications. Remote Sens. Environ. 2009, 113, 2037–2051. [Google Scholar] [CrossRef]
- Murchie, E.; Kefauver, S.; Araus-Ortega, J.L.; Muller, O.; Rascher, U.; Flood, P.; Lawson, T. Measuring the dynamic photosynthome. Ann. Bot. 2018, 122, 207–220. [Google Scholar] [CrossRef] [PubMed]
- Camino, C.; Zarco-Tejada, P.J.; Gonzalez-Dug, V. Effects of Heterogeneity within tree crowns on airborne-quantified SIF and the CWSI as indicators of water stress in the context of precision agriculture. Remote Sens. 2018, 10, 604. [Google Scholar] [CrossRef]
- Jia, M.; Zhu, J.; Ma, C.; Alonso, L.; Li, D.; Cheng, T.; Tian, Y.; Zhu, Y.; Yao, X.; Cao, W. Difference and potential of the upward and downward sun-induced chlorophyll fluorescence on detecting leaf nitrogen concentration in wheat. Remote Sens. 2018, 10, 1315. [Google Scholar] [CrossRef]
- Kalaji, H.M.; Bąba, M.; Gediga, K.; Goltsev, V.; Samborska, I.A.; Cetner, M.D.; Dimitrova, S.; Piszcz, U.; Bielecki, K.; Karmowska, K.; et al. Chlorophyll fluorescence as a tool for nutrient status identification in rapeseed plants. Photosynth. Res. 2018, 136, 329–343. [Google Scholar] [CrossRef]
- Thoren, D.; Schmidhalter, W. Nitrogen status and biomass determination of oilseed rape by laser-induced chlorophyll fluorescence. Eur. J. Agron. 2009, 30, 238–242. [Google Scholar] [CrossRef]
- Tagliabue, G.; Panigada, C.; Dechant, B.; Baret, F.; Cogliati, S.; Colombo, R.; Migliavacca, M.; Rademske, P.; Schickling, A.; Schüttemeyer, D.; et al. Exploring the spatial relationship between airborne-derived red and far-red sun-induced fluorescence and process-based GPP estimates in a forest ecosystem. Remote Sens. Environ. 2019, 231, 1–19. [Google Scholar] [CrossRef]
- Mohammed, G.H.; Colombo, R.; Middleton, E.M.; Rascher, U.; vanderTol, C.; Nedbal, L.; Goulas, Y.; Pérez-Priego, O.; Damm, A.; Meroni, M.; et al. Remote sensing of solar-induced chlorophyll fluorescence (SIF) in vegetation: 50 years of progress. Remote Sens. Environ. 2019, 231, 1–39. [Google Scholar] [CrossRef]
- Muller, O.; Keller, B.; Zimmerman, L.; Jedmowski, C.; Kleits, E.; Pingle, V.; Acebron, K.; dos Santos, N.Z.; Steier, A.; Freiwald, L.; et al. Field phenotyping and an example of proximal sensing of photosynthesis under elevated CO2. IEEE IGARSS 2018, 8252–8254. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Wang, J.; Zhao, C. Detecting solar-induced chlorophyll fluorescence from field radiance spectra based on the fraunhofer line principle. IEEE Trans. Geosci. Remote Sens. 2005, 43, 827–832. [Google Scholar] [CrossRef]
- Porcar-Castell, A.; Tyystjärvi, E.; Atherton, J.; van der Tol, C.; Flexas, J.; Pfündel, E.E.; Moreno, J.; Frankenberg, C.; Berry, J.A. Linking chlorophyll a fluorescence to photosynthesis for remote sensing applications: Mechanisms and challenges. J. Exp. Bot. 2014, 65, 4065–4095. [Google Scholar] [CrossRef] [PubMed]
- Thesien, A.F. Detecting chlorophyll fluorescence from orbit: The fraunhofer line depth model. In From Laboratory Spectroscopy to Remotely Sensed Spectra of Terrestrial Ecosystems, 1st ed.; Muttiah, R.S., Ed.; Springer: Dordrecht, The Netherlands, 2002; pp. 203–232. [Google Scholar] [CrossRef]
- Cogliati, S.; Verhoef, W.; Kraft, S.; Sabater, N.; Alonso, L.; Vicent, J.; Moreno, J.; Drusch, M.; Colombo, R. Retrieval of sun-induced fluorescence using advanced spectral fitting methods. Remote Sens. Environ. 2015, 169, 344–357. [Google Scholar] [CrossRef]
- Guanter, L.; Frankenberg, C.; Dudhia, A.; Lewis, P.E.; Gómez-Dans, J.; Kuze, A.; Suto, H.; Grainger, R.G. Retrieval and global assessment of terrestrial chlorophyll fluorescence from GOSAT space measurements. Remote Sens. Environ. 2012, 121, 236–251. [Google Scholar] [CrossRef]
- Sun, Y.; Frankenberg, C.; Jung, M.; Joiner, J.; Guanter, L.; Köhler, P.; Magney, T. Overview of Solar-Induced chlorophyll Fluorescence (SIF) from the Orbiting Carbon Observatory-2: Retrieval, cross-mission comparison, and global monitoring for GPP. Remote Sens. Environ. 2018, 209, 808–823. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiao, X.; Zhang, Y.; Wolf, S.; Zhou, S.; Joiner, J.; Guanter, L.; Verma, M.; Sun, Y.; Yang, I.; et al. On the relationship between sub-daily instantaneous and daily total gross primary production: Implications for interpreting satellite-based SIF retrievals. Remote Sens. Environ. 2018, 205, 276–289. [Google Scholar] [CrossRef]
- Ni, Z.; Lu, Q.; Huo, H.; Zhang, H. Estimation of chlorophyll fluorescence at different scales: A review. Sensors 2019, 19, 3000. [Google Scholar] [CrossRef]
- Siegmann, B.; Alonso, L.; Celesti, M.; Cogliati, S.; Colombo, R.; Damm, A.; Douglas, S.; Guanter, L.; Hanuš, J.; Kataja, K.; et al. The high-performance airborne imaging spectrometer HyPlant—From raw images to top-of-canopy reflectance and fluorescence products: Introduction of an automatized processing chain. Remote Sens. 2019, 11, 2760. [Google Scholar] [CrossRef]
- Cogliati, S.; Colombo, R.; Celesti, M.; Tagliabue, G.; Rascher, U.; Schickling, A.; Rademske, P.; Alonso, L.; Sabater, N.; Schuettemeyer, D.; et al. Red and far-red fluorescence emission retrieval from airborne high resolution spectra collected by the hyplant-fluo sensor. IEEE IGARSS 2018, 3935–3938. [Google Scholar] [CrossRef]
- Bandopadhyay, S.; Rastogi, A.; Juszczak, R.; Rademske, P.; Schickling, A.; Cogliati, S.; Julitta, T.; Mac Arthur, A.; Hueni, A.; Tomelleri, E.; et al. Examination of Sun-induced Fluorescence (SIF) signal on heterogeneous ecosystem platforms using ’HyPlant’. In Proceedings of the European Geosciences Union General Assembly (EGU), Vienna, Austria, 8–13 April 2018. [Google Scholar]
- Tagliabue, G.; Panigada, C.; Dechant, B.; Baret, F.; Cogliati, S.; Colombo, R.; Migliavacca, M.; Rademske, P.; Schickling, A.; Schuettemeyer, D.; et al. Sun-Induced Fluorescence and photosynthesis estimation in a mixed forest ecosystem using high resolution airborne imagery. In Proceedings of the American Geophysical Union, Fall Meeting, Washington, DC, USA, 12–14 December 2018. [Google Scholar]
- European Space Agency (ESA). Available online: https://earth.esa.int/web/guest/missions/esa-future-missions/flex (accessed on 9 April 2020).
- Rascher, U.; Alonso, L.; Burkart, A.; Cilia, C.; Cogliati, S.; Colombo, R.; Damm, A.; Drusch, M.; Guanter, L.; Hanus, J.; et al. Sun-induced fluorescence—A new probe of photosynthesis: First maps from the imaging spectrometer HyPlant. Glob. Change Biol. 2015, 21, 4673–4684. [Google Scholar] [CrossRef] [PubMed]
- Wieneke, S.; Ahrends, H.; Damm, A.; Pinto, F.; Stadler, A.; Rossini, M.; Rascher, U. Airborne based spectroscopy of red and far-red sun-induced chlorophyll fluorescence: Implications for improved estimates of gross primary productivity. Remote Sens. Environ. 2016, 184, 654–667. [Google Scholar] [CrossRef]
- Ni, Z.; Liu, Z.; Li, Z.L.; Nerry, F.; Huo, H.; Sun, R.; Yang, P.; Zhang, W. Investigation of atmospheric effects on retrieval of Sun-Induced Fluorescence using hyperspectral imager. Sensors 2016, 16, 480. [Google Scholar] [CrossRef] [PubMed]
- Bendig, J.; Gautam, D.; Malenovský, Z.; Lucieer, A. Influence of cosine corrector and uas platform dynamics on airborne spectral irradiance measurements. IEEE IGARSS 2018, 8822–8825. [Google Scholar] [CrossRef]
- Bandopadhyay, S.; Rastogi, A.; Juszczak, R. Review of Top-of-Canopy Sun-Induced Fluorescence (SIF) studies from ground, UAV, airborne to spaceborne observations. Sensors 2020, 20, 1144. [Google Scholar] [CrossRef]
- Zarco-Tejada, J.P.; Catalina, A.; González, M.R.; Martín, P. Relationships between net photosynthesis and steady-state chlorophyll fluorescence retrieved from airborne hyperspectral imagery. Remote Sens. Environ. 2013, 136, 247–258. [Google Scholar] [CrossRef]
- Atherton, J.; Mac Arthur, A.; Hakala, T.; Maseyk, K.; Robinson, I.; Liu, W.; Honkavaara, E.; Porcar-Castell, A. Drone measurements of solar-induced chlorophyll fluorescence acquired with a low-weight DFOV spectrometer system. IEEE IGARSS 2018, 8834–8836. [Google Scholar] [CrossRef]
- Milton, E.J.; Schaepman, M.E.; Anderson, K.; Kneubühler, M.; Fox, N. Progress in field spectroscopy. Remote Sens. Environ. 2009, 113, 92–109. [Google Scholar] [CrossRef]
- Mac Arthur, A.; Robinson, I. A critique of field spectroscopy and the challenges and opportunities it presents for remote sensing for agriculture, ecosystems, and hydrology. In Proceedings of the SPIE 9637 Remote Sensing for Agriculture, Ecosystems, and Hydrology XVII, Toulouse, France, 14 October 2015. [Google Scholar] [CrossRef]
- Mac Arthur, A.; Robinson, I.; Rossini, M.; Davis, N.; MacDonald, K. A dual-field-of-view spectrometer system for reflectance and fluorescence measurements (Piccolo Doppio) and correction of etaloning. In Proceedings of the 5th International Workshop on Remote Sensing of Vegetation Fluorescence, Paris, France, 22–24 April 2014; Available online: https://www.research.ed.ac.uk/portal/files/17385047/A_DFOV_spectrometer_system_for_reflectance_and_fluorescence_Piccolo.pdf (accessed on 9 April 2020).
- Mac Arthur, A.; Robinson, I.; Hagdorn, M.; Wood, J.; Kershaw, R.; Taylor, R. Piccolo spectrometer system for reflectance and fluorescence measurement from mobile and fixed platforms. In Proceedings of the Innovative Optical Tools for Proximal Sensing of Ecophysiological Processes (OPTIMISE), Vienna, Austria, 23–28 April 2017. [Google Scholar]
- Bendig, J.; Malenovský, Z.; Gautam, D.; Lucieer, A. Solar-induced chlorophyll fluorescence measured from an unmanned aircraft system—Sensor etaloning and platform motion correction. IEEE Trans. Geosci. Remote Sens. 2019. [Google Scholar] [CrossRef]
- JB Hyperspectral Devices. Available online: https://www.jb-hyperspectral.com/ (accessed on 7 July 2019).
- Burkart, A.; Cogliati, S.; Schickling, A.; Rascher, U. A novel UAV-based ultra-light weight spectrometer for field spectroscopy. IEEE Sens. J. 2014, 14, 62–67. [Google Scholar] [CrossRef]
- Becerra, J.; Martin, M.P.; Pacheco-Labrador, J.; Gonzalez-Cascon, R.; Melendo-Vega, J.R.; Angás, J. Chlorophyll Estimation in Mediterranean Quercus ilex tree canopies with hyperspectral vegetation indices at leaf and crown scales. In Proceedings of the IEEE YP Remote Sensing Conference, Aachen, Germany, 7–8 June 2018. [Google Scholar]
- Garzonio, R.; Di Mauro, B.; Colombo, R.; Cogliati, S. Surface reflectance and sun-induced fluorescence spectroscopy measurements using a small hyperspectral UAS. Remote Sens. 2017, 9, 472. [Google Scholar] [CrossRef]
- Cogliati, S.; Rossini, M.; Meroni, M.; Barducci, A.; Julitta, T.; Colombo, R. Unattended instruments for ground-based hyperspectral measurements: Development and application for plant photosynthesis monitoring. In Proceedings of the American Geophysical Union, Fall Meeting, San Francisco CA, USA, 5–9 December 2011. [Google Scholar]
- Anderson, K.; Rossini, M.; Pacheco-Labrador, J.; Balzarolo, M.; Mac Arthur, A.; Fava, F.; Julitta, T.; Vescovo, L. Inter-comparison of hemispherical conical reflectance factors (HCRF) measured with four fibre-based spectrometers. Opt. Express 2013, 21, 605–617. [Google Scholar] [CrossRef] [PubMed]
- Mathworks. Field Spectroscopy Facility Post Processing Toolbox—File Exchange—MATLAB Central. Available online: https://uk.mathworks.com/matlabcentral/fileexchange/31547-field-spectroscopy-facility-post-processing-toolbox (accessed on 9 April 2020).
- Maseyk, K.; Atherton, J.; Thomas, R.; Wood, K.; Tausz-Posch, S.; Mac Arthur, A.; Porcar-Castell, A.; Tausz, M. Investigating forest photosynthetic response to elevated CO2 using UAV-based measurements of Solar Induced Fluorescence. IEEE IGARSS 2018, 8830–8833. [Google Scholar] [CrossRef]
- Hart, K.M.; Curioni, G.; Blaen, P.; Harper, N.J.; Miles, P.; Lewin, K.F.; Nagy, J.; Bannister, E.J.; Cai, X.M.; Thomas, R.M.; et al. Characteristics of free air carbon dioxide enrichment of a northern temperate mature forest. Glob. Change Biol. 2019, 26, 1023–1037. [Google Scholar] [CrossRef] [PubMed]
- Mihai, L.; Mac Arthur, A.; Hueni, A.; Robinson, I.; Sporea, D. Optimized spectrometers characterization procedure for near ground Support of ESA FLEX Observations: Part 1 Spectral Calibration and Characterization. Remote Sens. 2018, 10, 289. [Google Scholar] [CrossRef]
- Herrmann, I.; Vosberg, S.K.; Townsend, P.A.; Conley, S.P. Spectral data collection by dual Field-of-View System under Changing Atmospheric Conditions—A case study of estimating early season soybean populations. Sensors 2019, 19, 457. [Google Scholar] [CrossRef]
- Bendig, J.; Malenovský, Z.; Siegmann, B.; Rademske, P.; Krause, A.; Gruenhagen, L.; Koeing, S.; Prum, M.; Gautam, D.; Rascher, U.; et al. UAS-based chlorophyll fluorescence measurements of barley canopies—Results from FLEXsense 2019. In Proceedings of the International Network on Remote Sensing of Terrestrial and Aquatic Fluorescence, Davos, Switzerland, 5–8 March 2019. [Google Scholar]
- Gautam, D.; Lucieer, A.; Bendig, J.; Malenovský, Z. Footprint determination of a spectroradiometer mounted on an unmanned aircraft system. IEEE Trans. Geosci. Remote Sens. 2019. [Google Scholar] [CrossRef]
- Gautam, D.; Lucieer, A.; Malenovskz, Z.; Watson, C. Comparison of MEMS-Based and FOG-Based IMUs TO Determine Sensor Pose on an Unmanned Aircraft System. J. Surv. Eng. 2017, 143. [Google Scholar] [CrossRef]
- Gautam, D.; Watson, C.; Lucieer, A.; Malenovský, Z. Error Budget for Geolocation of Spectroradiometer Point Observations from an Unmanned Aircraft System. Sensors 2018, 18, 3465. [Google Scholar] [CrossRef]
- Gautam, D.; Lucieer, A.; Watson, C.; McCoull. Lever-arm and boresight correction, and field of view determination of a spectroradiometer mounted on an unmanned aircraft system. ISPRS J. Photogramm. Remote Sens. 2019, 155, 25–36. [Google Scholar] [CrossRef]
- Julitta, T.; Burkart, A.; Colombo, R.; Rossini, M.; Schickling, A.; Migliavacca, M.; Cogliati, S.; Wutzler, T.; Rascher, U. Accurate measurements of fluorescence in the O2A and O2B band using the FloX spectroscopy system—Results and prospects. In Proceedings of the Potsdam GHG Flux Workshop: From Photosystems to Ecosystems, Potsdam, Germany, 24–26 October 2017. [Google Scholar]
- Cogliati, S.; Celesti, M.; Cesana, I.; Miglietta, F.; Genesio, L.; Julitta, T.; Schuettemeyer, D.; Drusch, M.; Rascher, U.; Jurado, P.; et al. A spectral fitting algorithm to retrieve the fluorescence spectrum from canopy radiance. Remote Sens. 2019, 11, 1840. [Google Scholar] [CrossRef]
- Drusch, M.; Moreno, J.; Del Bello, U.; Franco, R.; Goulas, Y.; Huth, A.; Kraft, S.; Middleton, E.; Miglietta, F.; Mohammed, G.; et al. The FLuorescence EXplorer mission concept—ESA’s Earth Explorer 8. IEEE Trans. Geosci. Remote Sens. 2018, 55, 1273–1284. [Google Scholar] [CrossRef]
- Damm, A.; Guanter, L.; Laurent, C.E.; Schaepman, M.E.; Schickling, A.; Rascher, U. FLD-based retrieval of sun-induced chlorophyll fluorescence from medium spectral resolution airborne spectroscopy data. Remote Sens. Environ. 2014, 256–266. [Google Scholar] [CrossRef]
- Sabater, N.; Vicent, J.; Alonso, L.; Verrelst, J.; Middleton, E.M.; Porcar-Castell, A.; Moreno, J. Compensation of Oxygen transmittance effects for proximal sensing retrieval of canopy–leaving sun–induced chlorophyll fluorescence. Remote Sens. 2018, 10, 1551. [Google Scholar] [CrossRef]
- Wang, N.; Bartholomeus, H.; Kooistra, L.; Suomalainen, J.; Brede, B.; Novani, M.; Masiliunas, D.; Clevers, J. Measuring temporal patterns of crop sun-induced chlorophyll fluorescence at canopy and plot scale. In Proceedings of the 11th EARSeL SIG IS Workshop, Brno, Czech Republic, 6–8 February 2019. [Google Scholar]
- Damm, A.; Erler, A.; Hillen, W.; Meroni, M.; Schaepman, M.E.; Verhoef, W.; Rascher, U. Modeling the impact of spectral sensor configurations on the FLD retrieval accuracy of sun-induced chlorophyll fluorescence. Remote Sens. Environ. 2011, 115, 1882–1892. [Google Scholar] [CrossRef]
- Alonso, L.; Sabater, N.; Vicent, J.; Mihai, N.; Moreno, J. Atmospheric and instrumental effects on the fluorescence remote sensing retrieval. IEEE IGARSS 2018. [Google Scholar] [CrossRef]
- Li, D.; Zheng, H.; Xu, X.; Lu, N.; Yao, X.; Jiang, J.; Wang, X.; Tian, Z.; Zhu, Z.; Cao, W.; et al. BRDF effect on the estimation of canopy chlorophyll content in paddy rice from UAV-based hyperspectral imagery. IEEE IGARSS 2018, 6464–6467. [Google Scholar] [CrossRef]
- Burkart, A.; Aasen, H.; Alonso, L.; Menz, G.; Bareth, G.; Rascher, U. Angular dependency of hyperspectral measurements over wheat characterized by a novel UAV based goniometer. Remote Sens. 2015, 7, 725–746. [Google Scholar] [CrossRef]
- Pinto, F.; Müller-Linow, M.; Schickling, A.; Cendrero-Mateo, M.P.; Ballvora, A.; Rascher, U. Multiangular observation of canopy sun-induced chlorophyll fluorescence by combining imaging spectroscopy and stereoscopy. Remote Sens. 2017, 9, 415. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Platform | Spectroradiometer | Additional Components | Unmanned Aerial System (UAS) | Highlights | |||
|---|---|---|---|---|---|---|---|
| Piccolo-Doppio | QEPro (Ocean Optics, Inc., USA) | Dimensions | 182 × 110 × 47 mm | Radio control for data transferring | Custom hexacopter | Tarot T910 frame KDE 4213 motors pixhawk autopilot | Can be used with two spectroradiometers |
| Spectral range (nm) | 650–800 | Battery Lithium Polymer 14.7 V, 1 A | Two independent channels | ||||
| Approximate spectral interval (nm) | 0.15 | Originally a raspberry Pi Model A. Currently updated to Pi3 | Custom quadcopter | T-motor U8 100 kv motors Pixhawk autopilot Based on a Gryphon dynamics frame | Dual FOV for NIR reflectance and SIF (O2-A/O2-B) | ||
| FWHM (nm) | 0.31 (5 μm optical slit)–0.35 (10 μm optical slit) | RTK or PPK correction | DJI Matrice 600 A3 Pro | Dimensions: 1.67 × 1.52 × 0.75 m | Upwelling and downwelling measurements near simultaneously | ||
| Digital range (analogue to digital converter; bit) | 18 | Payload 6 kg (16 min hovering) | Etaloning effect correction. | ||||
| SNR | 1000:1 | take-off weight 15 kg | Feasible installation on aerial and ground based platforms | ||||
| Dynamic range | 8.5 × 104:1 | Vertical and horizontal hovering accuracy 0.5 m and 1.5 m | |||||
| Integration time | up to 60 min | Vertical take-off and landing | DJI GNS- RTK system (3 GPS antenna) | ||||
| Has been tested with: | NIRQuest, QEPro, Flame, HR4000 and Maya | 3 GNSS antennas and IMU’s | |||||
| AirSIF | QEPro (Ocean Optics, Inc., USA) | Dimensions | 182 × 110 × 47 mm | Dual GNSS antenna | DJI Matrice 600 | Dimensions: 1.67 × 1.52 0.75 m | Adaption of the two independent channels system |
| Spectral range (nm) | 500–870 | IMU | Payload 7 kg | Characterization of cosine corrector homogeneity and linearity | |||
| Approximate spectral interval (nm) | 0.37 | Grasshopper 3 machine vision camera | take-off weight 15 kg | Upwelling and downwelling measurements near simultaneously | |||
| FWHM (nm) | 0.80 | RTK correction | Vertical and horizontal hovering accuracy 0.5 m and 1.5 m | NIR reflectance and SIF (O2-A/O2-B) | |||
| Digital range (bit) | 18 | Average flight speed: 2 m/s | Etaloning effect correction | ||||
| SNR | 1000:1 | Vertical take-off and landing | Dual GNSS antennae for accurate georeferencing in post processing | ||||
| Dynamic range | 8.5 × 104:1 | ||||||
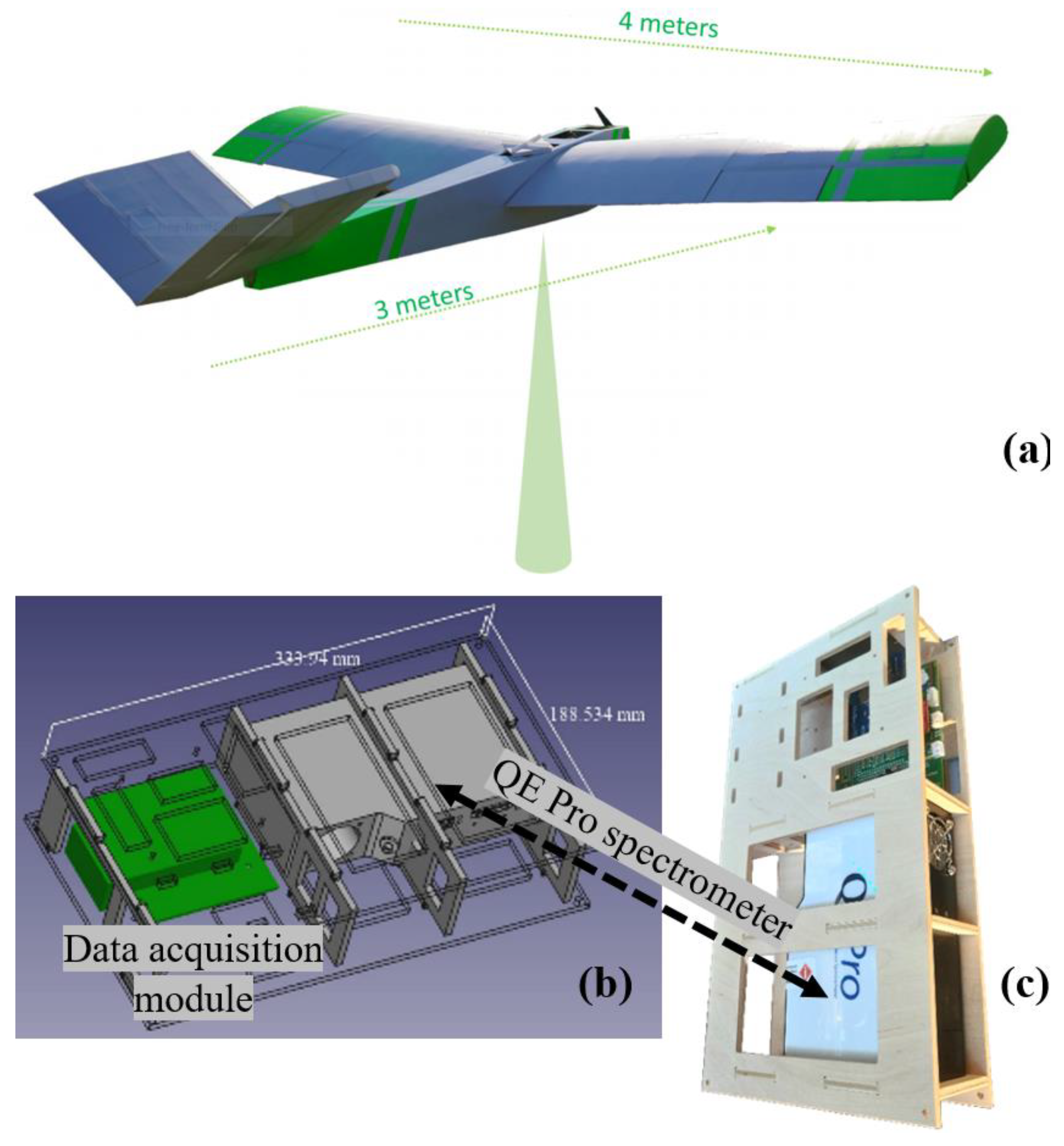
| AirFloX/FloxPlane | QEPro (Ocean Optics, Inc., USA) | Dimensions | 182 × 110 × 47 mm | Data acquisition module | FloXPlane: large fixed wing | Wingspan 4.40 m | The QEPro is integrated with a large but light UAS capable to elevate several kilometers with one spectrometer coupled |
| Spectral range (nm) | 650–800 | Length 3.32 m | |||||
| Approximate spectral interval (nm) | 0.17 | Independent battery management | take-off weight 24 kg | ||||
| FWHM (nm) | 0.30 | Stabilizing gimbal | Payload 2.5 kg | ||||
| Digital range (bit) | GPS times stamps for synchronizing | Battery weight 9 kg | |||||
| SNR | 1000:1 | Average cruise speed: 10 m/s | Single spot constant monitoring | ||||
| Dynamic range | 8.5 × 104:1 | - Endurance: 1.5 h normal cruise flight. High altitude 40 min. | Characterize SIF retrieved at very high altitude for a closer understanding of satellite-based estimations | ||||
| Runway length of about 10 m for start and landing. | |||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vargas, J.Q.; Bendig, J.; Mac Arthur, A.; Burkart, A.; Julitta, T.; Maseyk, K.; Thomas, R.; Siegmann, B.; Rossini, M.; Celesti, M.; et al. Unmanned Aerial Systems (UAS)-Based Methods for Solar Induced Chlorophyll Fluorescence (SIF) Retrieval with Non-Imaging Spectrometers: State of the Art. Remote Sens. 2020, 12, 1624. https://doi.org/10.3390/rs12101624
Vargas JQ, Bendig J, Mac Arthur A, Burkart A, Julitta T, Maseyk K, Thomas R, Siegmann B, Rossini M, Celesti M, et al. Unmanned Aerial Systems (UAS)-Based Methods for Solar Induced Chlorophyll Fluorescence (SIF) Retrieval with Non-Imaging Spectrometers: State of the Art. Remote Sensing. 2020; 12(10):1624. https://doi.org/10.3390/rs12101624
Chicago/Turabian StyleVargas, Juan Quirós, Juliane Bendig, Alasdair Mac Arthur, Andreas Burkart, Tommaso Julitta, Kadmiel Maseyk, Rick Thomas, Bastian Siegmann, Micol Rossini, Marco Celesti, and et al. 2020. "Unmanned Aerial Systems (UAS)-Based Methods for Solar Induced Chlorophyll Fluorescence (SIF) Retrieval with Non-Imaging Spectrometers: State of the Art" Remote Sensing 12, no. 10: 1624. https://doi.org/10.3390/rs12101624
APA StyleVargas, J. Q., Bendig, J., Mac Arthur, A., Burkart, A., Julitta, T., Maseyk, K., Thomas, R., Siegmann, B., Rossini, M., Celesti, M., Schüttemeyer, D., Kraska, T., Muller, O., & Rascher, U. (2020). Unmanned Aerial Systems (UAS)-Based Methods for Solar Induced Chlorophyll Fluorescence (SIF) Retrieval with Non-Imaging Spectrometers: State of the Art. Remote Sensing, 12(10), 1624. https://doi.org/10.3390/rs12101624