Automated Georectification and Mosaicking of UAV-Based Hyperspectral Imagery from Push-Broom Sensors

 , , , and
, , , and 
Abstract
1. Introduction
2. Materials and Methods
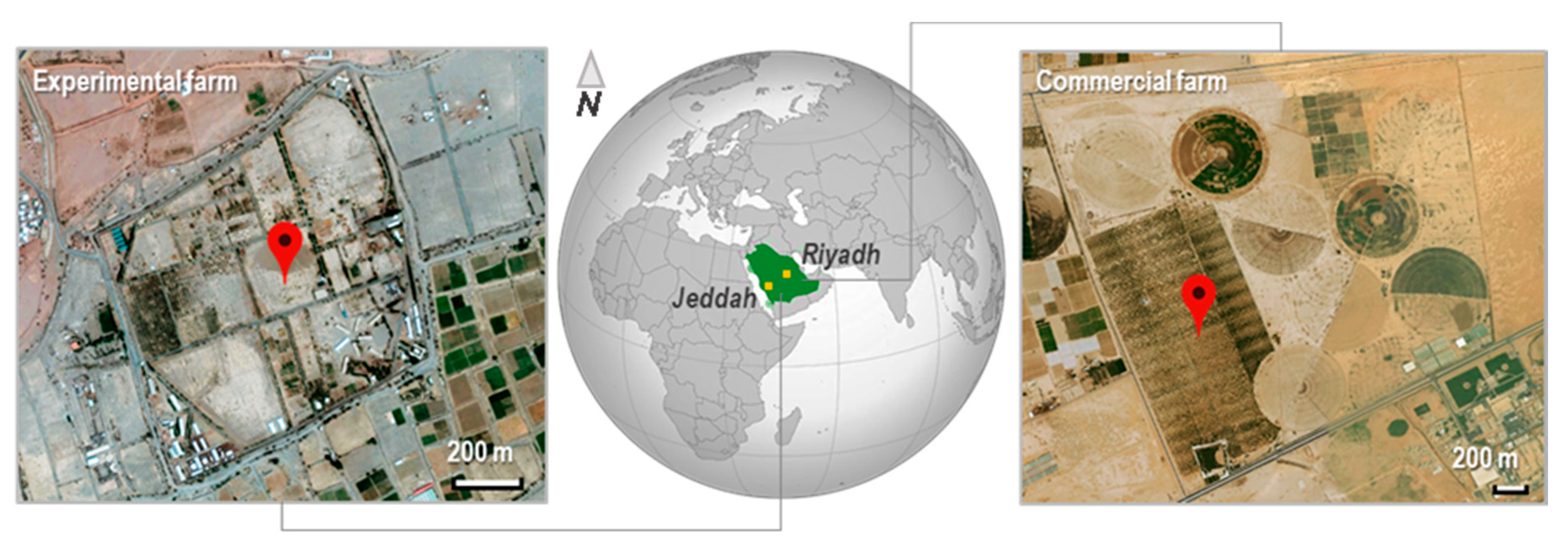
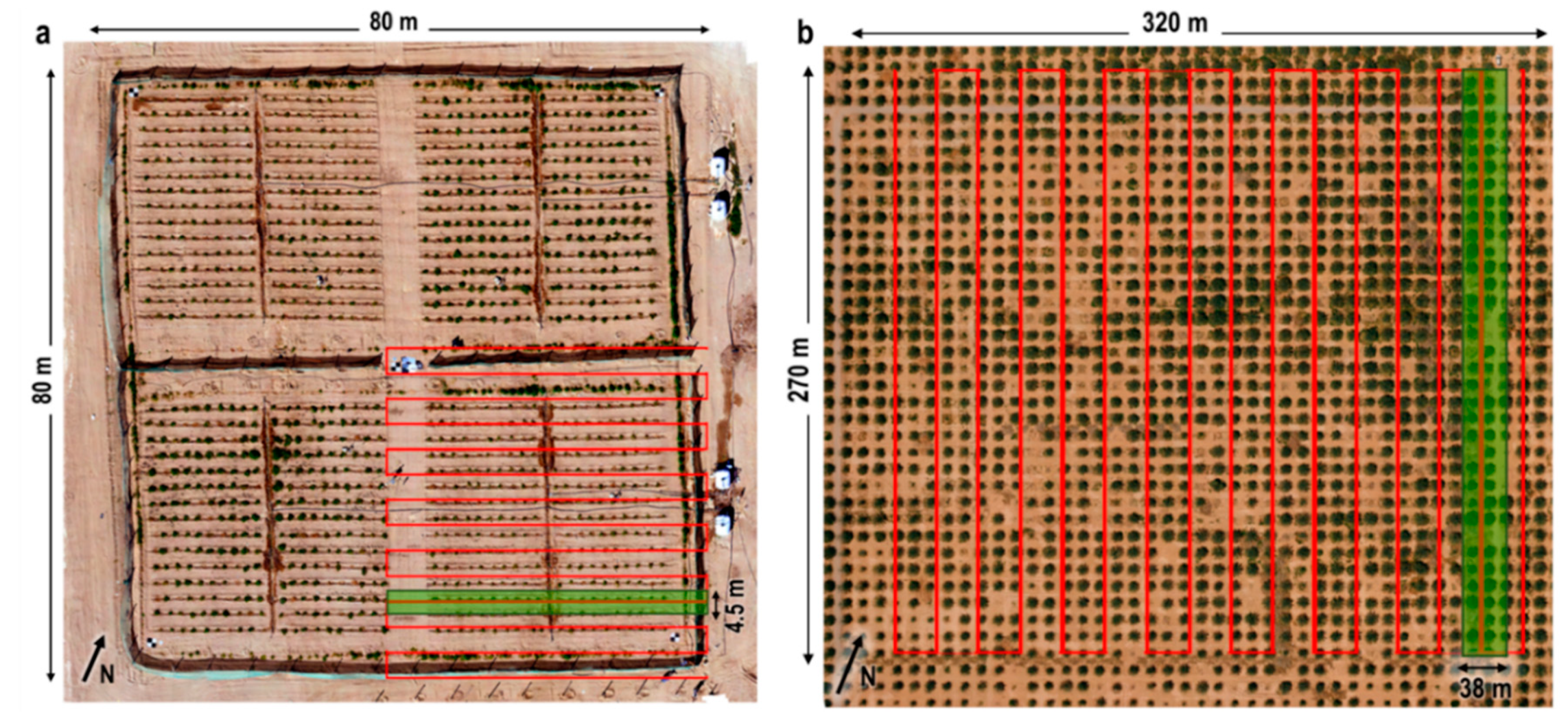
2.1. Study Area and Experimental Design
2.2. Unmanned Aerial Vehicles and Sensor Package
2.3. Flight Planning
2.4. Ground Data Collection
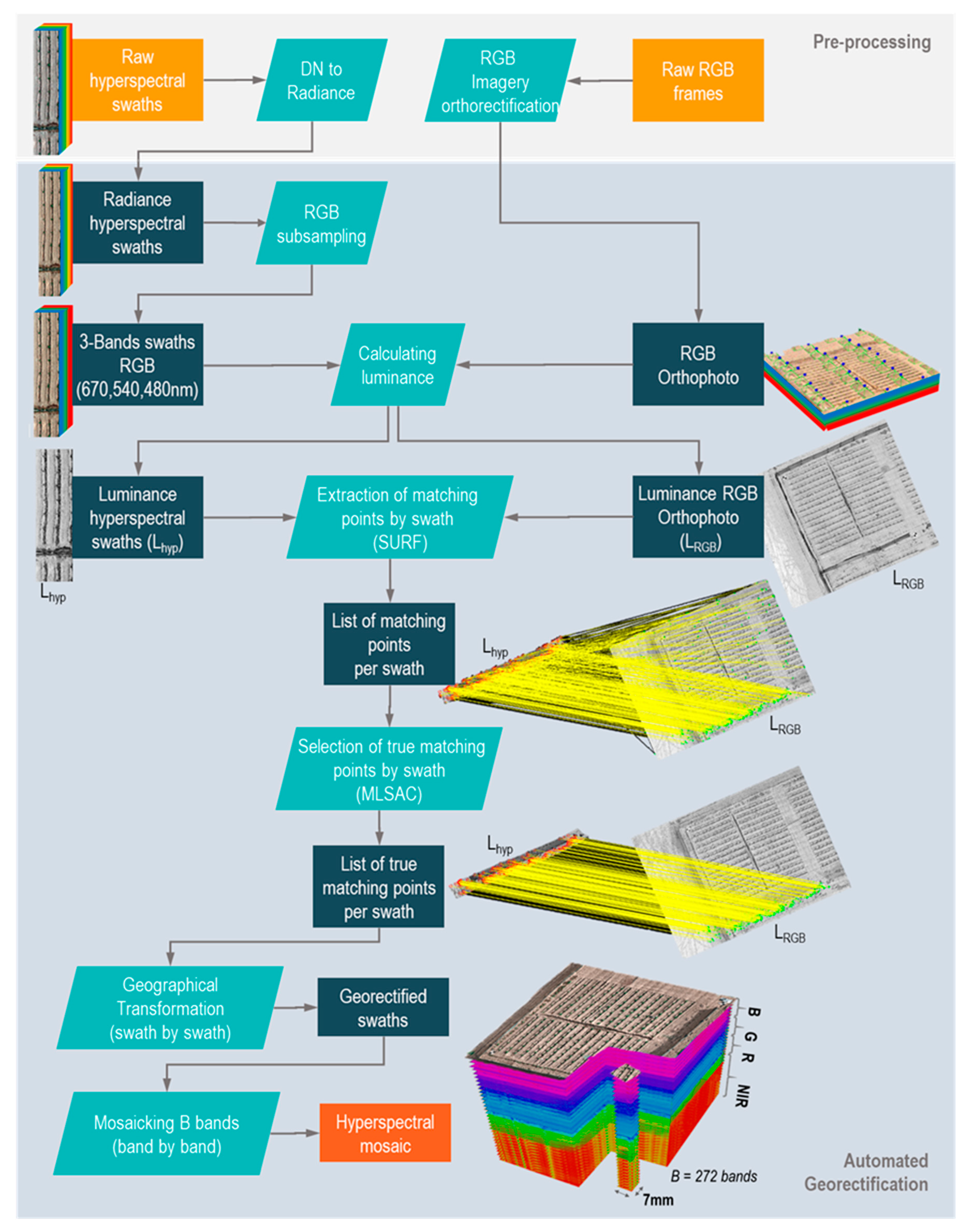
3. Methods
3.1. RGB Imagery Orthorectification
3.2. Raw Hyperspectral Data Preprocessing
3.3. Luminance Retrieval
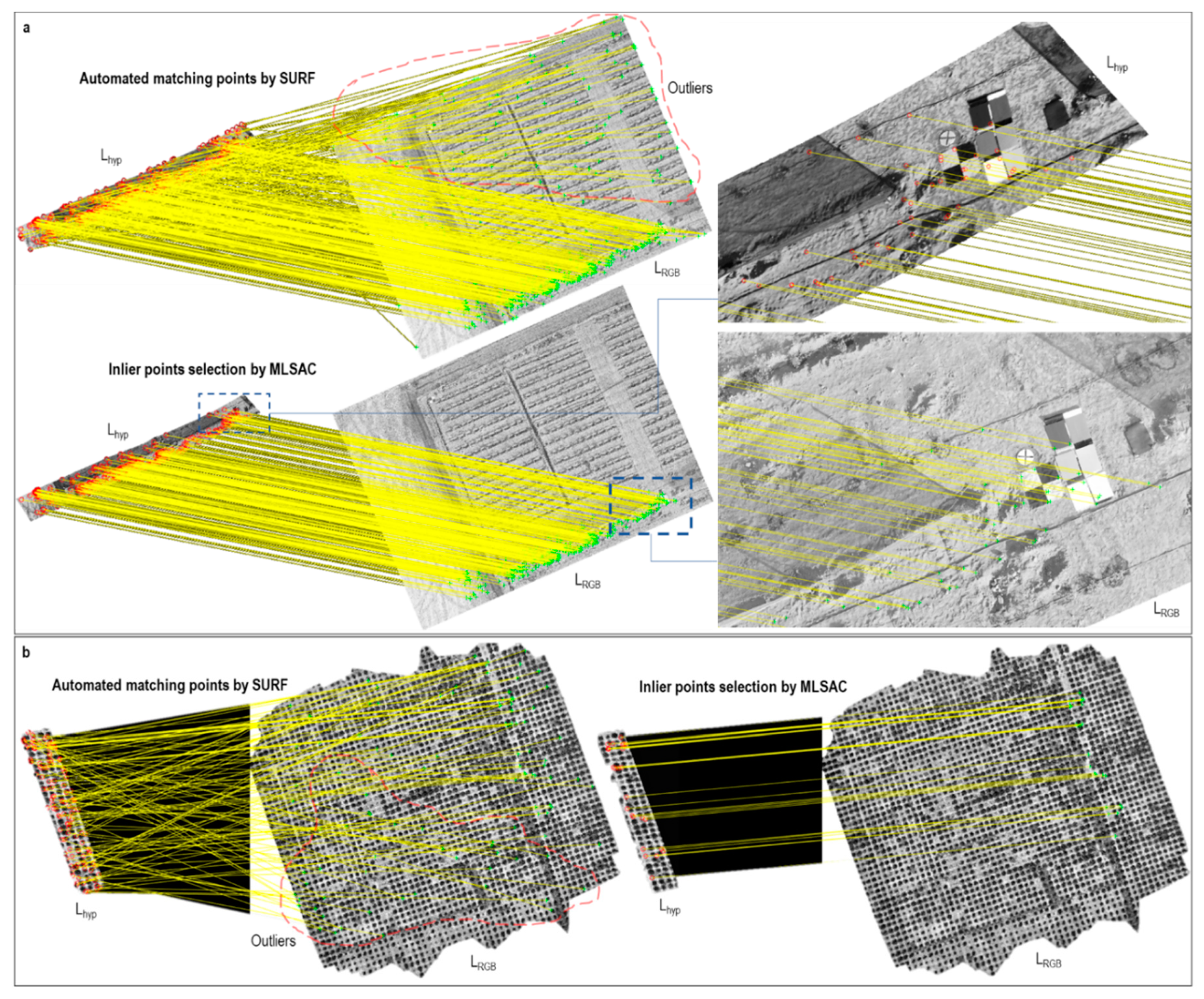
3.4. Extraction of Matching Points by SURF
3.5. Selection of True Matching Points by MLSAC
- MLSAC improves upon RANSAC by assuming the distance between paired points follows a Gaussian distribution, with a zero-mean error and a uniform standard deviation.
- A maximum likelihood cost function is evaluated in terms of finding the solution that minimizes the error.
- Since the optimal solution does not rely on a defined number of inliers, MLSAC is well suited to estimating complex geometric transformations that exist between images captured under different viewing geometries, where just a few true matches could be retrieved.
3.6. Geographical Transformation and Mosaicking
3.7. Georectification Assessment
4. Experimental Results and Analysis
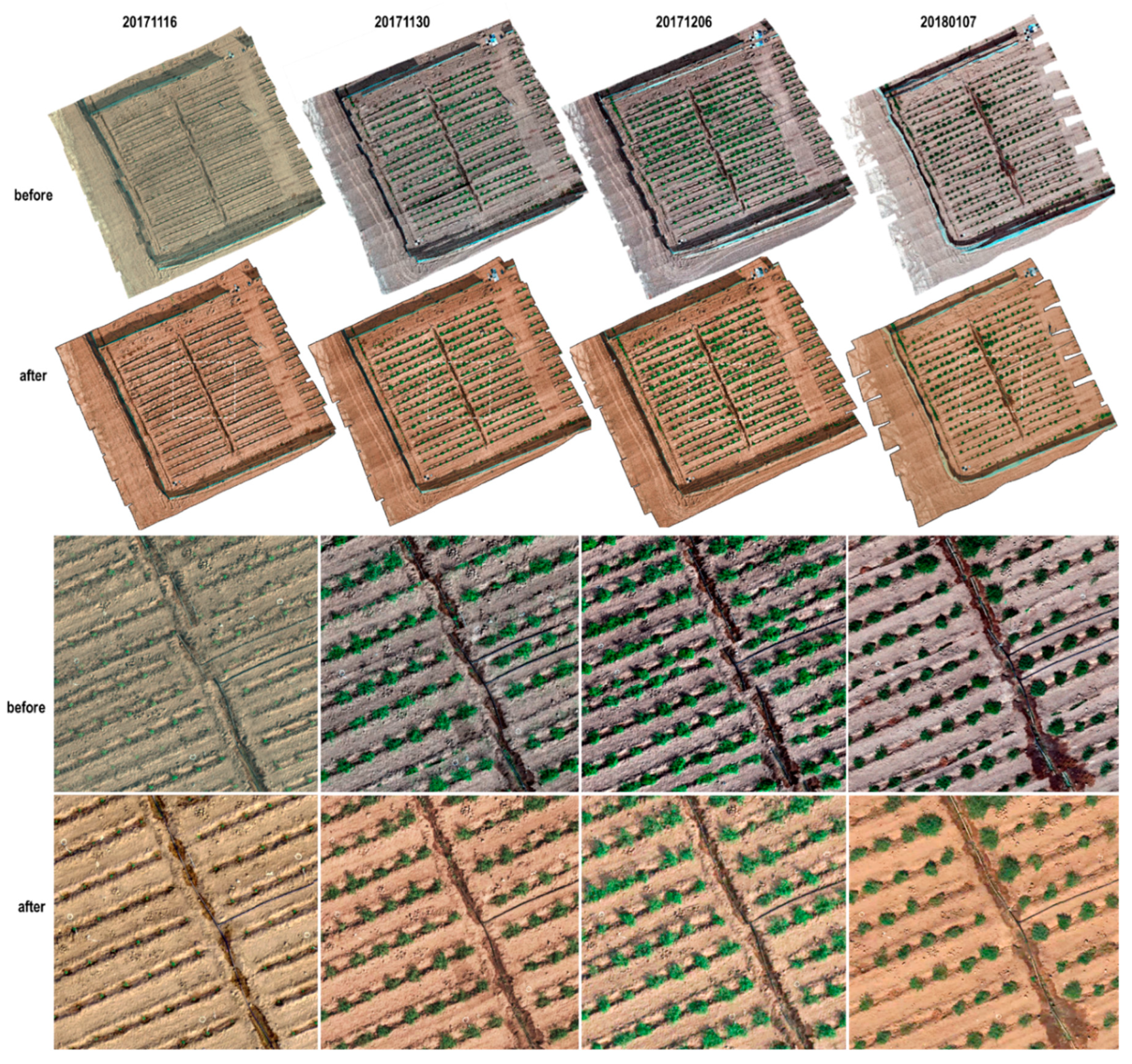
4.1. RGB Frame-Based Orthomosaic
4.2. Efficiency of the Automated Coregistration Routine
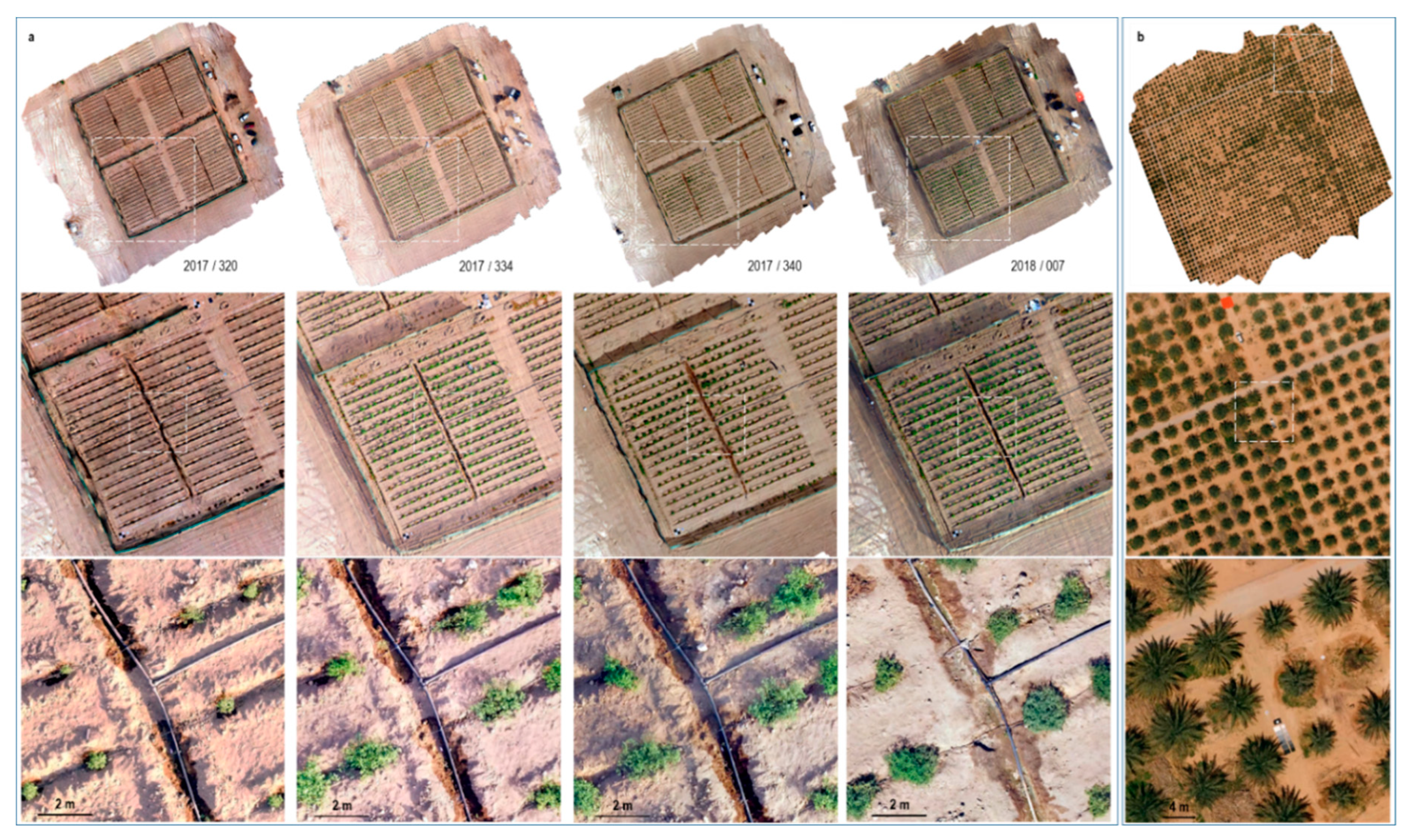
4.3. Qualitative Accuracy Assessment
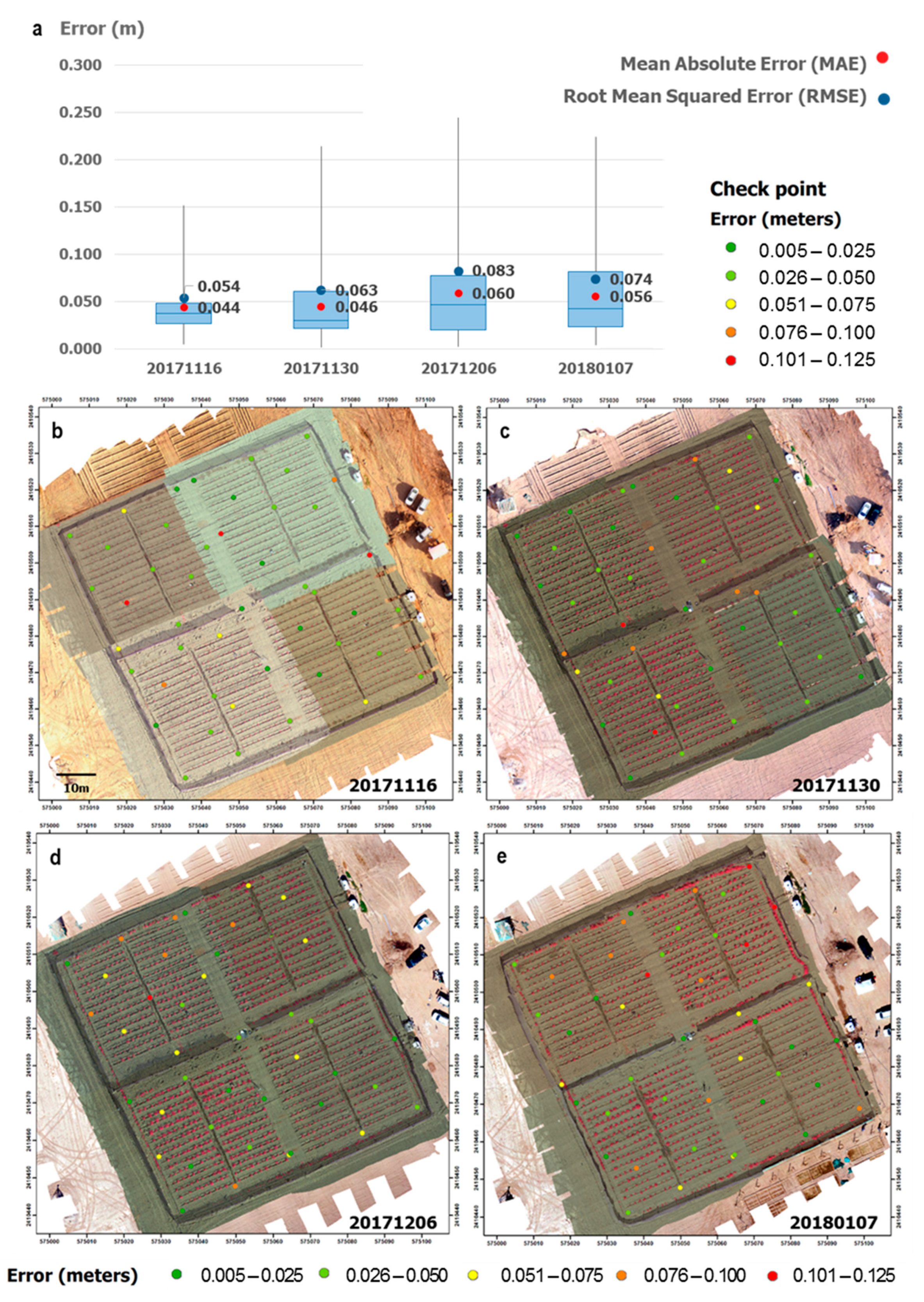
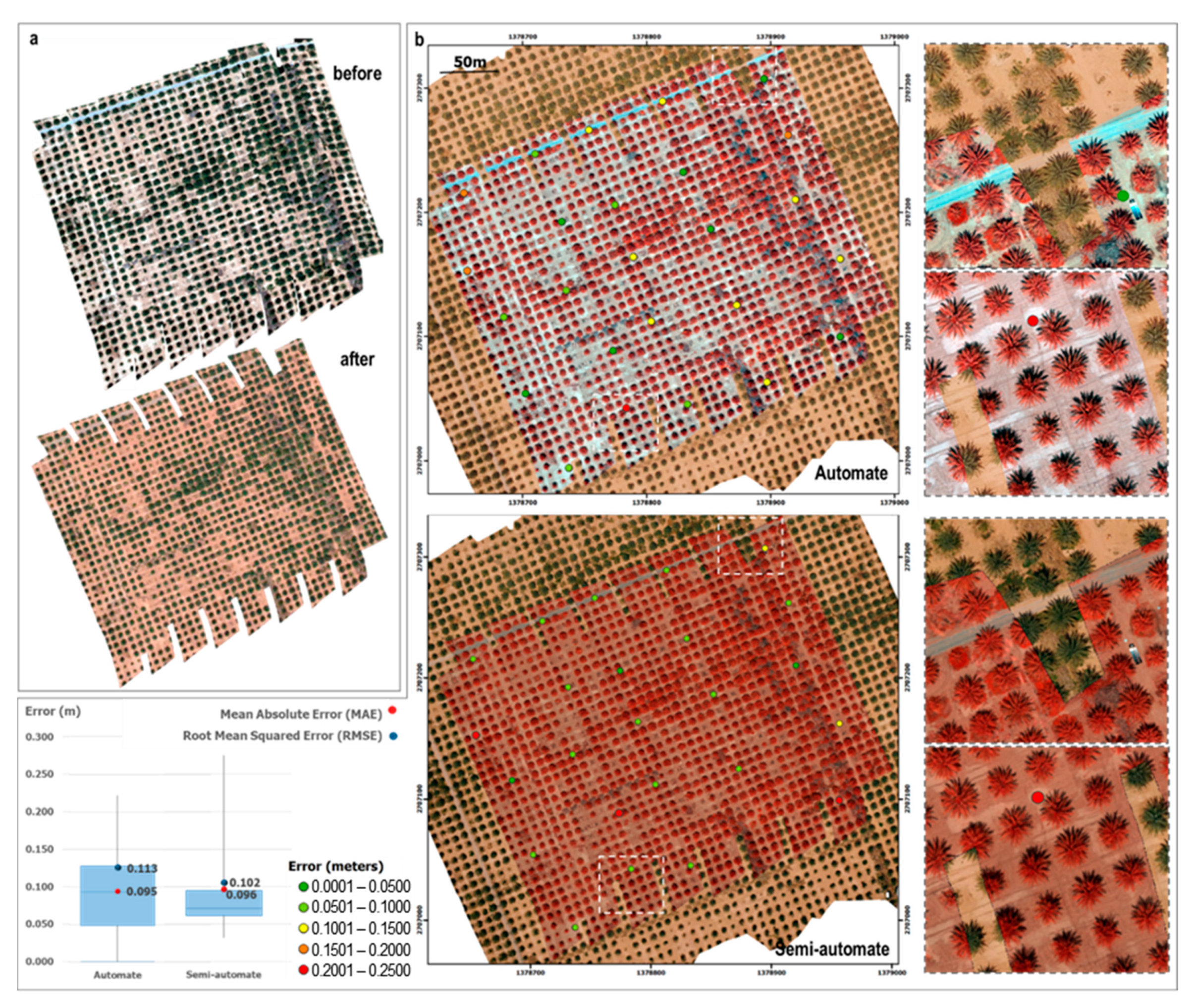
4.4. Spatial Accuracy
4.5. Processing Efficiency
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Atzberger, C. Advances in Remote Sensing of Agriculture: Context Description, Existing Operational Monitoring Systems and Major Information Needs. Remote Sens. 2013, 5, 949–981. [Google Scholar] [CrossRef]
- McCabe, M.F.; Rodell, M.; Alsdorf, D.E.; Miralles, D.G.; Uijlenhoet, R.; Wagner, W.; Lucieer, A.; Houborg, R.; Verhoest, N.E.; Franz, T.E.; et al. The future of Earth observation in hydrology. Hydrol. Earth Syst. Sci. 2017, 21, 3879–3914. [Google Scholar] [CrossRef] [PubMed]
- Warner, T.A.; Cracknell, A.P. Unmanned aerial vehicles for environmental applications. Int. J. Remote Sens. 2017, 38, 2029–2036. [Google Scholar]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correction Workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The Application of Small Unmanned Aerial Systems for Precision Agriculture: A Review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and Assessment of Spectrometric, Stereoscopic Imagery Collected using a Lightweight UAV Spectral Camera for Precision Agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef]
- Roosjen, P.P.J.; Suomalainen, J.M.; Bartholomeus, H.M.; Clevers, J.G.P.W. Hyperspectral Reflectance Anisotropy Measurements Using a Push-broom Spectrometer on an Unmanned Aerial Vehicle—Results for Barley, Winter Wheat, and Potato. Remote Sens. 2016, 8, 909. [Google Scholar] [CrossRef]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 3, 2349–2391. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The Need for Accurate Geometric and Radiometric Corrections of Drone-Borne Hyperspectral Data for Mineral Exploration: MEPHySTo—A Toolbox for Pre-Processing Drone-Borne Hyperspectral Data. Remote Sens. 2017, 9, 88. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Burkart, A.; Cogliati, S.; Schickling, A.; Rascher, U. A Novel UAV-Based Ultra-Light Weight Spectrometer for Field Spectroscopy. IEEE Sens. J. 2014, 14, 62–67. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Schickling, A.; Matveeva, M.; Damm, A.; Schween, J.; Wahner, A.; Graf, A.; Crewell, S.; Rascher, U. Combining Sun-Induced Chlorophyll Fluorescence and Photochemical Reflectance Index Improves Diurnal Modeling of Gross Primary Productivity. Remote Sens. 2016, 8, 574. [Google Scholar] [CrossRef]
- Garzonio, R.; Mauro, B.D.; Colombo, R.; Cogliati, S. Surface Reflectance and Sun-Induced Fluorescence Spectroscopy Measurements Using a Small Hyperspectral UAS. Remote Sens. 2017, 9, 472. [Google Scholar] [CrossRef]
- Zeng, C.; Richardson, M.; King, D.J. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Uto, K.; Seki, H.; Saito, G.; Kosugi, Y.; Komatsu, T. Development of a Low-Cost Hyperspectral Whiskbroom Imager Using an Optical Fiber Bundle, a Swing Mirror, and Compact Spectrometers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3909–3925. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Calderón, R.; Navas-Cortés, J.A.; Lucena, C.; Zarco-Tejada, P.J. High-resolution airborne hyperspectral and thermal imagery for early detection of Verticillium wilt of olive using fluorescence, temperature and narrow-band spectral indices. Remote Sens. Environ. 2013, 139, 231–245. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Morales, A.; Testi, L.; Villalobos, F.J. Spatio-temporal patterns of chlorophyll fluorescence and physiological and structural indices acquired from hyperspectral imagery as compared with carbon fluxes measured with eddy covariance. Remote Sens. Environ. 2013, 133, 102–115. [Google Scholar] [CrossRef]
- Hyperspectral Imaging Sensors. Available online: https://www.headwallphotonics.com/hyperspectral-sensors (accessed on 6 November 2018).
- Lucieer, A.; Malenovský, Z.; Veness, T.; Wallace, L. HyperUAS-Imaging Spectroscopy from a Multirotor Unmanned Aircraft System: HyperUAS-Imaging Spectroscopy from a Multirotor Unmanned. J. Field Robot 2014, 31, 571–590. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; McCabe, M.F.; Parkes, S.; Clarke, I. Push-broom hyperspectral imaging from an Unmanned Aircraft System (UAS)-geometric processing workflow and accuracy assessment. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W6, 379–384. [Google Scholar] [CrossRef]
- Malenovský, Z.; Lucieer, A.; King, D.H.; Turnbull, J.D.; Robinson, S.A. Unmanned aircraft system advances health mapping of fragile polar vegetation. Methods Ecol. Evol. 2017, 8, 1842–1857. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- Suomalainen, J.; Anders, N.; Iqbal, S.; Roerink, G.; Franke, J.; Wenting, P.; Hünniger, D.; Bartholomeus, H.; Becker, R.; Kooistra, L. A Lightweight Hyperspectral Mapping System and Photogrammetric Processing Chain for Unmanned Aerial Vehicles. Remote Sens. 2014, 6, 11013–11030. [Google Scholar] [CrossRef]
- HySpex Mjolnir V-1240. Available online: https://www.hyspex.no/products/mjolnir.php (accessed on 6 November 2018).
- Hruska, R.; Mitchell, J.; Anderson, M.; Glenn, N.F. Radiometric and Geometric Analysis of Hyperspectral Imagery Acquired from an Unmanned Aerial Vehicle. Remote Sens. 2012, 4, 2736–2752. [Google Scholar] [CrossRef]
- Aasen, H.; Bolten, A. Multi-temporal high-resolution imaging spectroscopy with hyperspectral 2D imagers - From theory to application. Remote Sens. Environ. 2018, 205, 374–389. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Fereres, E.; Villalobos, F. Mapping canopy conductance and CWSI in olive orchards using high resolution thermal remote sensing imagery. Remote Sens. Environ. 2009, 113, 2380–2388. [Google Scholar] [CrossRef]
- Stagakis, S.; González-Dugo, V.; Cid, P.; Guillén-Climent, M.L.; Zarco-Tejada, P.J. Monitoring water stress and fruit quality in an orange orchard under regulated deficit irrigation using narrow-band structural and physiological remote sensing indices. ISPRS J. Photogramm. Remote Sens. 2012, 71, 47–61. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Peña, J.M. An automatic object-based method for optimal thresholding in UAV images: Application for vegetation detection in herbaceous crops. Comput. Electron. Agric. 2015, 114, 43–52. [Google Scholar] [CrossRef]
- Pérez-Ortiz, M.; Peña, J.M.; Gutiérrez, P.A.; Torres-Sánchez, J.; Hervás-Martínez, C.; López-Granados, F. A semi-supervised system for weed mapping in sunflower crops using unmanned aerial vehicles and a crop row detection method. Appl. Soft Comput. 2015, 37, 533–544. [Google Scholar] [CrossRef]
- Hagen, N.; Kester, R.T.; Gao, L.; Tkaczyk, T.S. Snapshot advantage: A review of the light collection improvement for parallel high-dimensional measurement systems. Opt. Eng. 2012, 51, 111702. [Google Scholar] [CrossRef] [PubMed]
- Hagen, N.; Kudenov, M.W. Review of snapshot spectral imaging technologies. Opt. Eng. 2013, 52, 090901. [Google Scholar] [CrossRef]
- Yuan, H.; Yang, G.; Li, C.; Wang, Y.; Liu, J.; Yu, H.; Feng, H.; Xu, B.; Zhao, X.; Yang, X. Retrieving Soybean Leaf Area Index from Unmanned Aerial Vehicle Hyperspectral Remote Sensing: Analysis of RF, ANN, and SVM Regression Models. Remote Sens. 2017, 9, 309. [Google Scholar] [CrossRef]
- Ramirez-Paredes, J.P.; Lary, D.J.; Gans, N.R. Low-altitude Terrestrial Spectroscopy from a Push-broom Sensor. J. Field Robot 2015, 33, 837–852. [Google Scholar] [CrossRef]
- Habib, A.; Xiong, W.; He, F.; Yang, H.L.; Crawford, M. Improving Orthorectification of UAV-Based Push-Broom Scanner Imagery Using Derived Orthophotos from Frame Cameras. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 262–276. [Google Scholar] [CrossRef]
- Schläpfer, D.; Schaepman, M.E.; Itten, K.I. PARGE: Parametric geocoding based on GCP-calibrated auxiliary data. Proc. SPIE 3438 Imaging Spectrom. IV. 1998, 3438, 334–344. [Google Scholar]
- SpectralView. Available online: http://www.headwallphotonics.com/software (accessed on 5 May 2019).
- Habib, A.; Zhou, T.; Masjedi, A.; Zhang, Z.; Evan Flatt, J.; Crawford, M. Boresight Calibration of GNSS/INS-Assisted Push-Broom Hyperspectral Scanners on UAV Platforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1734–1749. [Google Scholar] [CrossRef]
- Chen, Y.H.; Lin, H.Y.S.; Su, C.W. Full-Frame Video Stabilization Via SIFT Feature Matching. In Proceedings of the Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Kitakyushu, Japan, 27–29 August 2014; pp. 361–364. [Google Scholar]
- Shene, T.N.; Sridharan, K.; Sudha, N. Real-Time SURF-Based Video Stabilization System for an FPGA-Driven Mobile Robot. IEEE Trans. Ind. Electron. 2016, 63, 5012–5021. [Google Scholar] [CrossRef]
- Jeon, S.; Yoon, I.; Jang, J.; Yang, S.; Kim, J.; Paik, J. Robust Video Stabilization Using Particle Keypoint Update and l1-Optimized Camera Path. Sensors 2017, 17, 337. [Google Scholar] [CrossRef]
- Anand, R.; Veni, S.; Aravinth, J. Big Data Challenges in Airborne Hyperspectral Image for Urban Landuse Classification. In Proceedings of the International Conference on Advances in Computing, Communications and Informatics (ICACCI), Udupi, India, 13–16 September 2017; pp. 1808–1814. [Google Scholar]
- Shi, Y.; Thomasson, J.A.; Murray, S.C.; Pugh, N.A.; Rooney, W.L.; Shafian, S.; Rajan, N.; Rouze, G.; Morgan, C.L.; Neely, H.L.; et al. Unmanned Aerial Vehicles for High-Throughput Phenotyping and Agronomic Research. PLoS ONE 2016, 11, e0159781. [Google Scholar] [CrossRef] [PubMed]
- Hassaballah, M.; Abdelmgeid, A.A.; Alshazly, H.A. Image Features Detection, Description and Matching. In Image Feature Detectors and Descriptors. Studies in Computational Intelligence; Awad, A., Hassaballah, M., Eds.; Springer International Publishing: Warsaw, Poland, 2016; Volume 630, pp. 11–45. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Torr, P.H.S.; Zisserman, A. MLESAC: A New Robust Estimator with Application to Estimating Image Geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Johansen, K.; Morton, M.J.; Malbeteau, Y.M.; Aragon, B.; Al-Mashharawi, S.K.; Ziliani, M.G.; Angel, Y.; Fiene, G.M.; Negrão, S.S.; Mousa, M.A.; et al. Unmanned Aerial Vehicle-based Phenotyping using Morphometric and Spectral Analysis can Quantify Responses of Wild Tomato Plants to Salinity Stress. Front. Plant Sci. 2019, 10, 370. [Google Scholar] [CrossRef] [PubMed]
- Aaftab, A.; Burhan, A.; Muhammad, N.; Ihsanullah, D.; Sidra, R. Effectiveness of silicon and irrigation scheduling for mitigating drought stress in sorghum (Sorghum bicolor L.) in arid region of Saudi Arabia. Int. J. Biosci. 2018, 12, 266–278. [Google Scholar]
- Aly, A.A.; Al-Omran, A.M.; Sallam, A.S.; Al-Wabel, M.I.; Al-Shayaa, M.S. Vegetation cover change detection and assessment in arid environment using multi-temporal remote sensing images and ecosystem management approach. Solid Earth. 2016, 7, 713–725. [Google Scholar] [CrossRef]
- Matrice 600. Available online: https://www.dji.com/matrice600 (accessed on 6 November 2018).
- Matrice 100. Available online: https://www.dji.com/matrice100 (accessed on 6 May 2019).
- Zenmuse X3. Available online: https://www.dji.com/zenmuse-x3 (accessed on 6 December 2017).
- Universal Ground Control Station. Available online: https://www.ugcs.com (accessed on 6 November 2018).
- Leica Viva GS15—Smart Antenna. Available online: https://leica-geosystems.com/products/gnss-systems/smart-antennas/leica-viva-gs15 (accessed on 17 May 2019).
- Leica AS10 GNSS—Compact Antenna. Available online: https://leica-geosystems.com/products/gnss-reference-networks/antennas/leica-as10 (accessed on 6 November 2018).
- Leica Geo Office. Available online: https://leica-geosystems.com/products/total-stations/software/leica-geo-office (accessed on 16 December 2017).
- Turner, D.; Lucieer, A.; Watson, C. An Automated Technique for Generating Georectified Mosaics from Ultra-High Resolution Unmanned Aerial Vehicle (UAV) Imagery, Based on Structure from Motion (SfM) Point Clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Agisoft PhotoScan. Available online: https://www.agisoft.com (accessed on 6 November 2018).
- Verhoeven, G. Taking computer vision aloft—Archaeological three-dimensional reconstructions from aerial photographs with photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Ziliani, M.G.; Parkes, S.D.; Hoteit, I.; McCabe, M.F. Intra-Season Crop Height Variability at Commercial Farm Scales Using a Fixed-Wing UAV. Remote Sens. 2018, 10, 2007. [Google Scholar] [CrossRef]
- Kanan, C.; Cottrell, G.W. Color-to-Grayscale: Does the Method Matter in Image Recognition? PLoS ONE 2012, 7, e29740. [Google Scholar] [CrossRef]
- Recommendation ITU-R BT.601-7. Available online: http://www.itu.int/dms_pubrec/itu-r/rec/bt/R-REC-BT.601-7201103-I!!PDF-E.pdf (accessed on 6 November 2018).
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: New York, NY, USA, 2004; pp. 25–64. [Google Scholar]
- Sammut, C.; Webb, G.I. Mean Absolute Error. In Encyclopedia of Machine Learning; Springer: Boston, MA, USA, 2011. [Google Scholar]
- Geospatial Positioning Accuracy Standards. Part 3: National Standard for Spatial Data Accuracy, FGDC-STD-007.3-1998. Available online: https://www.fgdc.gov/standards/projects/FGDC-standards-projects/accuracy/part3/chapter3 (accessed on 6 November 2018).
- ISO 19157:2013 Geographic Information-Data Quality. Available online: https://www.iso.org/standard/32575.html (accessed on 6 November 2018).
- Sedaghat, A.; Ebadi, H. Distinctive Order Based Self-Similarity descriptor for multi-sensor remote sensing image matching. ISPRS J. Photogramm. Remote Sens. 2015, 108, 62–71. [Google Scholar] [CrossRef]
- Goncalves, H.; Corte-Real, L.; Goncalves, J.A. Automatic Image Registration through Image Segmentation and SIFT. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2589–2600. [Google Scholar] [CrossRef]
- Sedaghat, A.; Ebadi, H. Remote Sensing Image Matching Based on Adaptive Binning SIFT Descriptor. IEEE Trans. Geosci. Remote Sens. 2015, 5283–5293. [Google Scholar] [CrossRef]
- Liu, J.; Gong, J.; Guo, B.; Zhang, W. A Novel Adjustment Model for Mosaicking Low-Overlap Sweeping Images. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4089–4097. [Google Scholar] [CrossRef]
- Tareen, S.A.K.; Saleem, Z. A comparative analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK. In Proceedings of the International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar]
- Oniga, V.-E.; Breaban, A.-I.; Statescu, F. Determining the Optimum Number of Ground Control Points for Obtaining High Precision Results Based on UAS Images. Proceedings 2018, 2, 352. [Google Scholar] [CrossRef]
- Schläpfer, D.; Hausold, A.; Richter, R. A Unified Approach to Parametric Geocoding and Atmospheric/Topographic Correction for Wide FOV Airborne Imagery. Part 1: Parametric Ortho-Rectification Process. In Proceedings of the EARSeL Workshop on Imaging Spectroscopy, Enschede, The Netherlands, 11–13 July 2000. [Google Scholar]
- Choi, S.; Taemin, K.; Wonpil, Y. Performance Evaluation of RANSAC Family. In Proceedings of the British Machine Vision Conference, Newcastle, UK, 3–6 September 2009; pp. 81.1–81.12. [Google Scholar]
- Mesas-Carrascosa, F.J.; Rumbao, I.C.; Berrocal, J.A.B.; Porras, A.G.F. Positional Quality Assessment of Orthophotos Obtained from Sensors Onboard Multi-Rotor UAV Platforms. Sensors 2014, 14, 22394–22407. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crop | Area (ha) | Year/DOY | RGB Frames | Hyperspectral Swaths Per Day | Hyperspectral Data Size (Gigabytes) | Ground Sampling Distance GSD (m) | GCPs |
|---|---|---|---|---|---|---|---|
| Tomato | 0.64 | 2017/320 | 196 | 56 | 232.8 | 0.007 | 5 |
| 2017/334 | 220.4 | ||||||
| 2017/340 | 202.2 | ||||||
| 2018/007 | 274.7 | ||||||
| Date Palms | 8.70 | 2018/087 | 184 | 16 | 77 | 0.06 | 3 |
| Crop | Year/DOY | RGB Features | Metrics Accounting all Swaths per Flight | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Hyperspectral Features | Matching Points | Average Inliers | Inliers/Matching | |||||||
| Min. | Aver. | Max. | Min. | Aver. | Max. | (%) | ||||
| Tomato | 2017/320 | 309461 | 37135 | 38667 | 40199 | 818 | 951 | 1083 | 757 | 80 |
| 2017/334 | 293013 | 32817 | 35161 | 37505 | 633 | 771 | 908 | 591 | 77 | |
| 2017/340 | 246575 | 29589 | 36487 | 43385 | 393 | 505 | 616 | 327 | 65 | |
| 2018/007 | 301210 | 36145 | 36798 | 37451 | 520 | 667 | 813 | 477 | 71 | |
| Date Palms | 2018/087 | 448156 | 8963 | 9750 | 10537 | 80 | 103 | 125 | 27 | 26 |
| Crop | Image (Year/DOY) | Check Points | Min. Error (m) | Max. Error (m) | MAE (m) | RMSE (m) | Accuracy 95% (m) | # Check Points Whose Error > MAE |
|---|---|---|---|---|---|---|---|---|
| Tomato | 2017/320 | 52 | 0.005 | 0.151 | 0.044 | 0.054 | 0.092 | 3 |
| 2017/334 | 52 | 0.001 | 0.214 | 0.046 | 0.063 | 0.107 | 2 | |
| 2017/340 | 52 | 0.003 | 0.289 | 0.060 | 0.083 | 0.137 | 1 | |
| 2018/007 | 52 | 0.003 | 0.224 | 0.056 | 0.074 | 0.126 | 3 | |
| Date Palms | Automated | 25 | 0.001 | 0.222 | 0.095 | 0.113 | 0.188 | 1 |
| Semi-automated | 0.032 | 0.275 | 0.096 | 0.102 | 0.167 | 3 |
| Crop | Hypers. Mosaic | Mosaic Dimension (Rows × Columns) | Mosaic Size (Giga-bytes) | Matching Points Extraction and Selection (hours) | Geographic Transforma-tion (hours) | Mosaicking Time (hours) | Net Processing Time (hours) |
|---|---|---|---|---|---|---|---|
| Toma-toes | 2017/320 | 16571 × 16429 | 220 | 0.6 | 0.6 | 5.3 | 6.5 |
| 2017/334 | 16714 × 16143 | 195 | 0.5 | 0.6 | 5.2 | 6.3 | |
| 2017/340 | 16571 × 16000 | 170 | 0.4 | 0.5 | 5.2 | 6.1 | |
| 2018/007 | 16429 × 16571 | 220 | 0.6 | 0.6 | 5.3 | 6.5 | |
| Date Palms | Automa-ted | 8588 × 7758 | 17 | 0.3 | 0.4 | 3.0 | 3.7 |
| Semiautomated | 17 | 21.6 | 25 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angel, Y.; Turner, D.; Parkes, S.; Malbeteau, Y.; Lucieer, A.; McCabe, M.F. Automated Georectification and Mosaicking of UAV-Based Hyperspectral Imagery from Push-Broom Sensors. Remote Sens. 2020, 12, 34. https://doi.org/10.3390/rs12010034
Angel Y, Turner D, Parkes S, Malbeteau Y, Lucieer A, McCabe MF. Automated Georectification and Mosaicking of UAV-Based Hyperspectral Imagery from Push-Broom Sensors. Remote Sensing. 2020; 12(1):34. https://doi.org/10.3390/rs12010034
Chicago/Turabian StyleAngel, Yoseline, Darren Turner, Stephen Parkes, Yoann Malbeteau, Arko Lucieer, and Matthew F. McCabe. 2020. "Automated Georectification and Mosaicking of UAV-Based Hyperspectral Imagery from Push-Broom Sensors" Remote Sensing 12, no. 1: 34. https://doi.org/10.3390/rs12010034
APA StyleAngel, Y., Turner, D., Parkes, S., Malbeteau, Y., Lucieer, A., & McCabe, M. F. (2020). Automated Georectification and Mosaicking of UAV-Based Hyperspectral Imagery from Push-Broom Sensors. Remote Sensing, 12(1), 34. https://doi.org/10.3390/rs12010034