1. Introduction
Mapping the distribution and quantity of vegetation is critical for managing natural resources, preserving biodiversity, estimating vegetation carbon storage, and understanding the Earth’s energy balance [
1]. Remote-sensing technology has been proven to be an efficient and economical tool for mapping vegetation types and cover at large spatial scales [
2,
3]. However, the spectral similarities among different land surface objects and different vegetation types have been a major factor influencing the accuracy of vegetation mapping [
4]. Because vegetation phenology information provided by multi-temporal images with a finer spatial resolution is beneficial for improving vegetation mapping accuracy [
5,
6], the derivation and processing of multi-temporal remote-sensing data with a high spatial resolution have been an active research area in the field of vegetation mapping.
Given the tradeoff between spatial resolution and temporal revisiting cycles [
7], current satellite images have either high spatial resolutions but low temporal resolutions (e.g., Landsat, Sentinel 2) or low spatial resolutions but high temporal resolutions (e.g., Moderate-resolution Imaging Spectroradiometer (MODIS), Sentinel-3). Moreover, cloud contaminations can further increase the fragmentation of satellite remote-sensing data [
8]. Spatiotemporal data fusion, a methodology for fusing satellite images from two different sensors, has been developed to generate data with both high spatial and temporal resolutions [
9]. Conventionally, in spatiotemporal data fusion, imagery with a high spatial resolution but low temporal resolution is called “fine imagery”, while imagery with a low spatial resolution but high temporal resolution is called “coarse imagery” [
10], which is being followed in this study.
So far, many spatiotemporal data-fusion algorithms have been developed, and they can be generally divided into five categories (i.e., unmixed-based, weight function-based, Bayesian-based, learning-based, and hybrid methods) [
11]. Nevertheless, most of these methods have a common key step, which is to find similar pixels from the fine imagery. These similar pixels from the fine imagery are used to predict the fused value and reduce the prediction uncertainty caused by noise [
12]. For example, the spatial and temporal adaptive reflectance fusion model (STARFM) uses the spectral similarity and spatial distance as constrains to select similar pixels within a defined search window and predict the reflectance value of a target pixel by using the linear weighted method [
13]. The enhanced spatial and temporal adaptive reflectance fusion model (ESTARFM) also uses spectral similarity to select initial similar pixels in two fine images acquired at different times, and further constrains the selection results by only using the similar pixels found in both images [
12]. The flexible spatiotemporal data-fusion model (FSDAF) uses auxiliary land-cover classification information to help determine the similar pixels by ensuring they have the same land cover type as the target pixel [
14]. The performance of all above-mentioned methods is highly influenced by the similar pixel selection accuracy since wrong similar pixels can lead to errors in the final spatiotemporal fusion results [
15].
Currently, the similar pixel selection methods based on spectral similarity satisfy the requirements for applications such as land-cover mapping [
16], since the spectral differences among different land cover types are observable. However, these methods may not perform well when they are used in vegetation-mapping applications. Differences in spectral reflectance are much smaller among vegetation types than among land cover types [
2], and spectral similarity-based methods (e.g., STARFM and ESTARFM) may lead to many wrong similar pixels. These misidentified similar pixels may result in blurring effects at the boundaries among vegetation types in the fused images and, therefore, cause vegetation mapping errors. Moreover, the vegetation classification map required by the methods using auxiliary classification information (e.g., FSDAF) is not available in most applications. How to accurately identify similar pixels from fine imagery is still a challenging task for spatiotemporal fusion in vegetation mapping applications.
In addition to spectral information, image textures have been shown to be another useful type of information for vegetation mapping [
17,
18]. Different compositions of vegetation types may have significant differences in textures, which can help separating adjacent vegetation types [
19,
20]. The object-based image analysis (OBIA) method is one of the several approaches utilizing image textures [
21]. OBIA incorporates texture information, spectral information and context structure to segment the image into homogeneous objects [
22]. Each segmented object from OBIA can be treated as a thematic class, e.g., vegetation type, which provides a potential candidate pool for selecting similar pixels. Therefore, using the OBIA segmented objects as a constraint beyond spectral similarity might provide a more accurate set of similar pixels that have the same vegetation type as the target pixel. However, to the best of our knowledge, the effectiveness of OBIA in similar pixel selection has not yet been tested, although the consensus for advantages of OBIA has been achieved among numerous researchers.
This study describes and tests an object-based spatiotemporal data-fusion framework that uses an additional constraint for selecting similar pixels from segmented objects. To evaluate the proposed framework, we implemented the object-based improvement in the three widely used spatiotemporal data-fusion algorithms, i.e., STARFM, ESTARFM and FSDAF and tested their performance.
2. Methodology
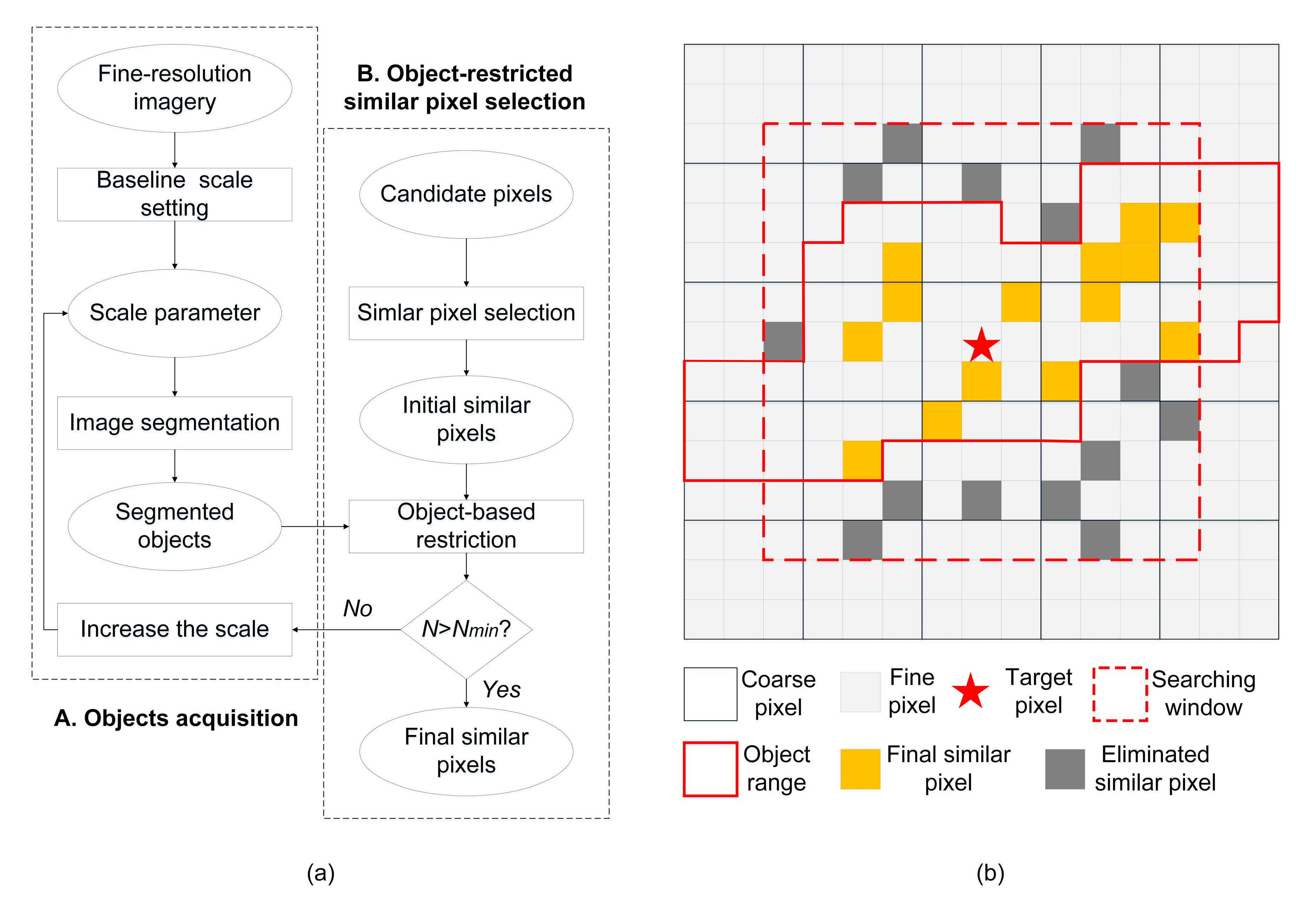
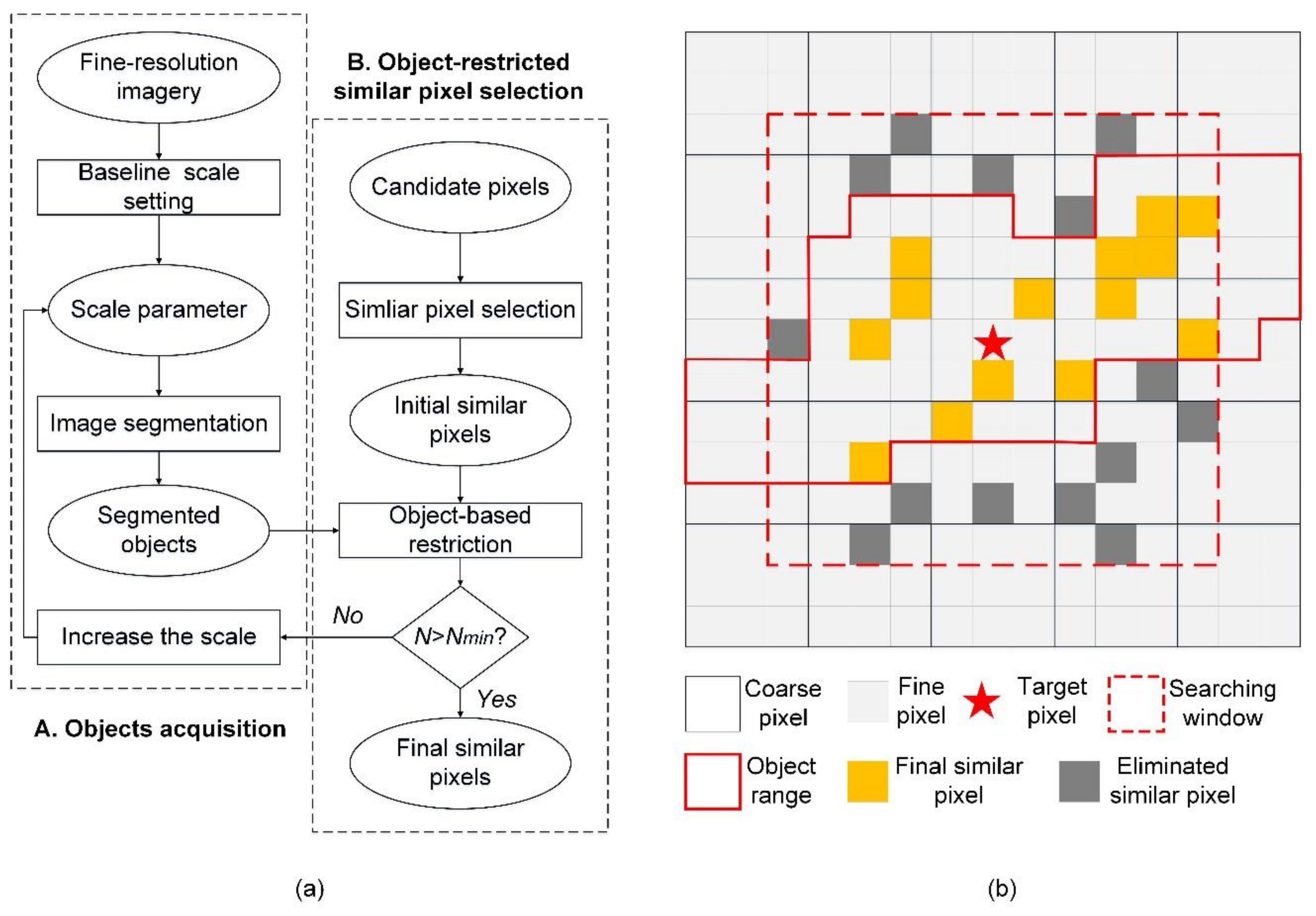
Although most current spatiotemporal fusion algorithms differ greatly in principle, they share the same four implementation steps: (i) initial prediction; (ii) selection of similar pixels; (iii) calculation of weighting coefficients of similar pixels; (iv) final prediction based on similar pixels. These steps can be described as follows: first, the value of each fine pixel is estimated at the predicted date through temporal/spatial dependence; next, pixels similar to each fine pixel are selected; then, the weight of each similar pixel is calculated based on the spectral/spatial distance; lastly, the weighted sum of similar pixels is used to predict the final value of each fine pixel. In this study, the proposed framework shares the same four steps mentioned above. To reduce the uncertainty brought by selecting the wrong similar pixels in step (ii), we integrated an object-restricted similar pixel selection method (
Figure 1). Any spatiotemporal fusion algorithms sharing the same four steps described above (e.g., STARFM, ESTARFM and FSDAF) can use this framework by replacing step (ii) with the proposed method. Details of the object-restricted similar pixel selection process are introduced as follows.
Defining objects through image segmentation is the basis of the object-restricted similar pixel selection (
Figure 1a). For the proposed framework, it is critical to set a suitable scale for the image segmentation process because too small a scale can lead to a small object size that might result in an insufficient number of similar pixels, and an excessively large scale might decrease the homogeneity within an object. To determine the optimal segmentation scale, this study uses the improved Estimation of Scale Parameter tool (ESP2) developed by Drăguţ et al. [
23], an optimal scale selection method that can simultaneously minimize the intrasegment homogeneity and maximize the intersegment heterogeneity [
24]. Three optimal segmentation scales, from small to large (i.e., Level 1, Level 2 and Level 3), are provided by the ESP2 tool, and the smallest optimal scale Level 1 is used as the baseline scale to start the similar pixel selection process.
With the determined baseline scale, the multiresolution segmentation method is used to segment the input fine image into objects. After segmentation, each pixel is exclusively assigned to an object and gets a corresponding object identification. The rule of the proposed object-restricted similar pixel selection can be described as follows:
where
F refers to the fine imagery at the input time;
refers to the
bth band; (
) indicates the locations of the candidate similar pixel within the search window;
is the size of the search window; (
) indicates the location of the target pixel, which is usually at the center of the search window;
represents the principle used by the spatiotemporal fusion algorithm to determine if the candidate pixel is a similar pixel, which could be a threshold or a prerequisite (e.g., STARFM selects similar pixels with the smallest spectral difference from the target pixel); and
O indicates the object identification. The proposed object-restricted similar pixel selection gives a further restriction to the location of similar pixels without any changes in the principle
. To be specific, if the given similar pixel is labeled with the same object identification as the target pixel, we can assume that it has the same thematic class, i.e., vegetation type in this study, as the target pixel, thus it will be retained after the object-based restriction. Otherwise, it will be removed from the set of similar pixels. As shown in
Figure 1b, the similar pixels within the search window that are located outside the object are eliminated.
Although the smallest optimal scale provided by ESP2 tool can provide highly homogeneous similar pixels within an obtained object, it may also result in an insufficient number of similar pixels required by the spatiotemporal data-fusion algorithm (e.g., FSDAF recommends selecting more than 20 similar pixels). To resolve this issue, the proposed framework further iterates the similar pixel selection process by increasing the segmentation scale until enough similar pixels are found (
Figure 1a). To be more specific, if enough similar pixels cannot be found, the next-level optimal scale (Level 2) provided by the ESP2 tool is used to segment the input fine images using the multiresolution segmentation method. The derived object(s) containing the pixel(s) are used to replace the original object(s) derived at the baseline scale. Then, the same similar pixel selection procedure described above is used to select similar pixels. If the number of similar pixels is still insufficient, the process is iterated again by replacing the segmentation scale with the Level 3 optimal scale. If the number of similar pixels is still insufficient, the object restriction process is replaced by only using the search window to find similar pixels.
3. Experiments
3.1. Test Algorithm Description
STARFM, ESTARFM and FSDAF are three widely used spatiotemporal data-fusion methods, and are usually considered as benchmarked methods to rectify the performance of spatiotemporal data fusion [
25,
26]. These three methods all rely on similar pixels within a search window for predicting the value of a target pixel, which can be improved by the proposed framework. In this study, we re-edited their pixel selection process using the proposed object-restricted similar pixel selection method to derive object-restricted STARFM (OSTARFM), object-restricted ESTARFM (OESTARFM), and object-restricted FSDAF (OFSDAF), following the methods described in
Section 2. The performances of these object-restricted models were compared with the original algorithms to validate the proposed object-based spatiotemporal data-fusion framework.
The implementation of the proposed framework to specific spatiotemporal data fusion can be coordinated with the method of similar pixel selection used by the algorithm. There are two approaches for implementing the proposed framework: “restrict-then-select” and “select-then-restrict”. Specifically, “restrict-then-select” is restricting the shape and size of the search window to segmented objects before the similar pixel selection and thereby selecting the number and location of candidate pixels. In contrast, the “select-then-restrict” is restricting the selected similar pixels after similar pixel selection. For algorithms that select N candidate pixels with the minimum spectral distance as the similar pixel, such as STARFM and FSDAF, we used the “restrict-then-select” approach to implement the proposed framework. Since with the simple discrimination criterion of minimum spectral distance it is easy to select pixels outside the objects as similar pixels, using the “restrict-then-select” approach allows obtaining enough similar pixels. For algorithms that use thresholds to select similar pixels, such as ESTARFM, the result obtained through the “restrict-then-select” approach is the same as that through the “select-then-restrict” approach. However, the “select-then-restrict” approach uses less computational time than the “restrict-then-select” approach in the iterative selection of objects at different scales when the number of similar pixels is insufficient.
It should be noted that the FSDAF method requires a pre-classified vegetation map as a prerequisite for selecting the similar pixels. The selected similar pixels should have the same vegetation class as the targeted prediction pixel. In this study, we used the ISODATA (Iterative Self-Organizing Data Analysis Technique) algorithm to classify the study area into 6–10 classes from the input fine imagery based on pre-knowledge [
27]. Moreover, considering the low vegetation mapping accuracy using unsupervised classification methods in complex vegetated environment, we further replaced the procedure of converting the temporal changes from coarse pixels to fine pixels by using segmented objects instead of vegetation classes in the OFSDAF method. The conversion principle can be found in [
14], and is not described in detail here. It should be noted that this study focuses on the changes in performance of the STARFM, ESTARFM and FSDAF algorithms by using the proposed object-based strategy, rather than on comparing these algorithms. In addition, in this study, the original and improved fusion methods were tested under the same parameter setting.
3.2. Data
We selected a study area with high vegetation coverage in Tenihe Farm (49°33′N, 120°29′E), which is located in Hulunbuir, Inner Mongolia, China (
Figure 2a). This region is characterized by a continental temperate semi-arid climate, with an average annual mean air temperature of −1.8 °C to 2.1 °C and an average annual total precipitation of 350–400 mm [
28]. The growing season is from May to September. For this study we chose a rectangular site of 18 km × 18 km, with UTM coordinates 50 N of the southeast and northwest vertexes (5,421,810, 773,070) and (5,439,810, 791,070), respectively (
Figure 2b). The average elevation of the study site is about 850 m and the elevation of the central area is higher than the surrounding (
Figure 2c). The study site is in the forest-steppe ecotone with both natural and planted vegetation. Vegetation types in the study area include food crops (e.g., wheat/
Triticum aestivum Linn and corn/
Zea mays L.), cash crops (e.g., beet/
Beta vulgaris Linn., and canola/
Brassica campestris L.), meadow steppes (e.g., Chinese leymus/
Leymus chinensis (Trin.) and stipa/
Stipa capillata Linn.), cold temperate broadleaf deciduous forests (e.g., birch/
Betula platyphylla Suk. and aspen/
Populus davidiana Dode) and cold temperate coniferous forests (e.g., larch/
Larix gmelinii (Ruprecht) Kuzeneva.). Food crops and cash crops are located in the north and south of the study site, meadow steppes and cold temperate broadleaf deciduous forests are distributed in the central area of the study site, and cold temperate coniferous forests are mainly located in the southeastern area of the study site (
Figure 2d). The complex and diverse vegetation composition provides an ideal condition for evaluating the performance of the proposed framework in vegetated areas.
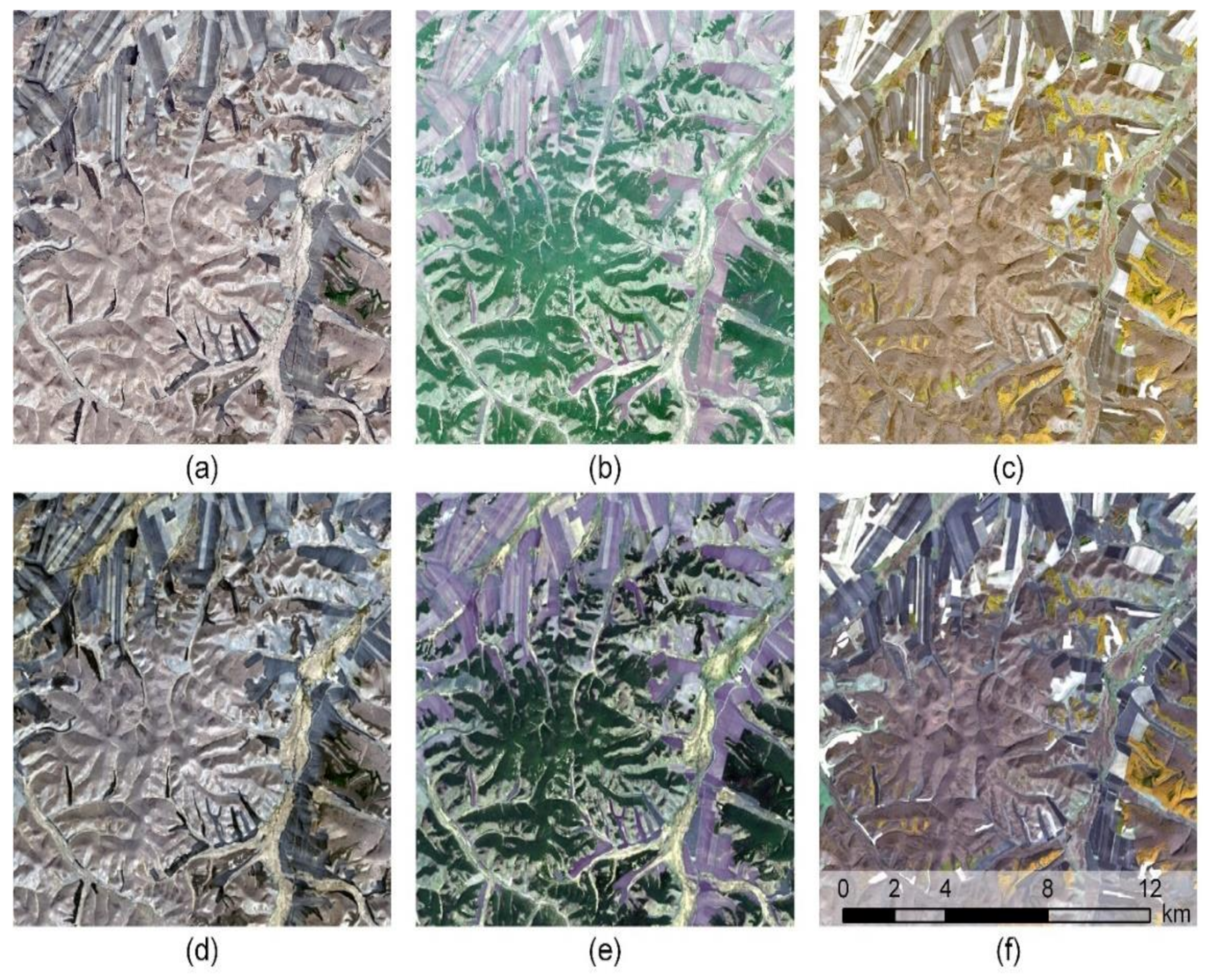
In this study, we used the 10 m resolution Sentinel 2 and 30 m resolution Landsat 8 data. As shown in
Figure 3, three sets of cloud-free Sentinel 2 and Landsat 8 images (L1 products) covering the study area were obtained from the Copernicus Open Access Hub (
https://scihub.copernicus.eu/) and the United States Geological Survey (USGS) websites (
https://earthexplorer.usgs.gov/), respectively. Sentinel 2 images have four 10 m bands (band 2, 3, 4, 8), which were treated as the fine bands to fuse with the corresponding Landsat 8 bands (band 2, 3, 4, 5). Specifically, we employed the cloud-free Sentinel 2 image on 25 April 2018 (
Figure 3a) and Landsat 8 images on 24 April 2018 and 26 May 2018 (
Figure 3d,e) to predict a Sentinel-like imagery on 26 May 2018 using original and improved STARFM, ESTARFM and FSDAF (
Table 1). These images were collected over a one-month timespan in the early growing season of the study site, during which we can clearly observe the vegetation phenological changes (
Figure 3). Since the ESTARFM algorithm requires more than one input fine image, we further collected the Sentinel 2 imagery on 2 October 2018 (
Figure 3c) and a Landsat 8 imagery on 1 October 2018 (
Figure 3f). In October, the study site is at the end of the growing season, and most vegetation has experienced dramatic phenological changes compared with the beginning of the growing season in April.
All collected L1 Sentinel 2 and Landsat 8 data were preprocessed using the Sentinel Application Platform (SNAP) and Land Surface Reflectance Code (LaSRC) to convert to land-surface reflectance products, respectively. Then, all Landsat surface reflectance products were registered to the Sentinel 2 products using the Automated Registration and Orthorectification Package (AROP) [
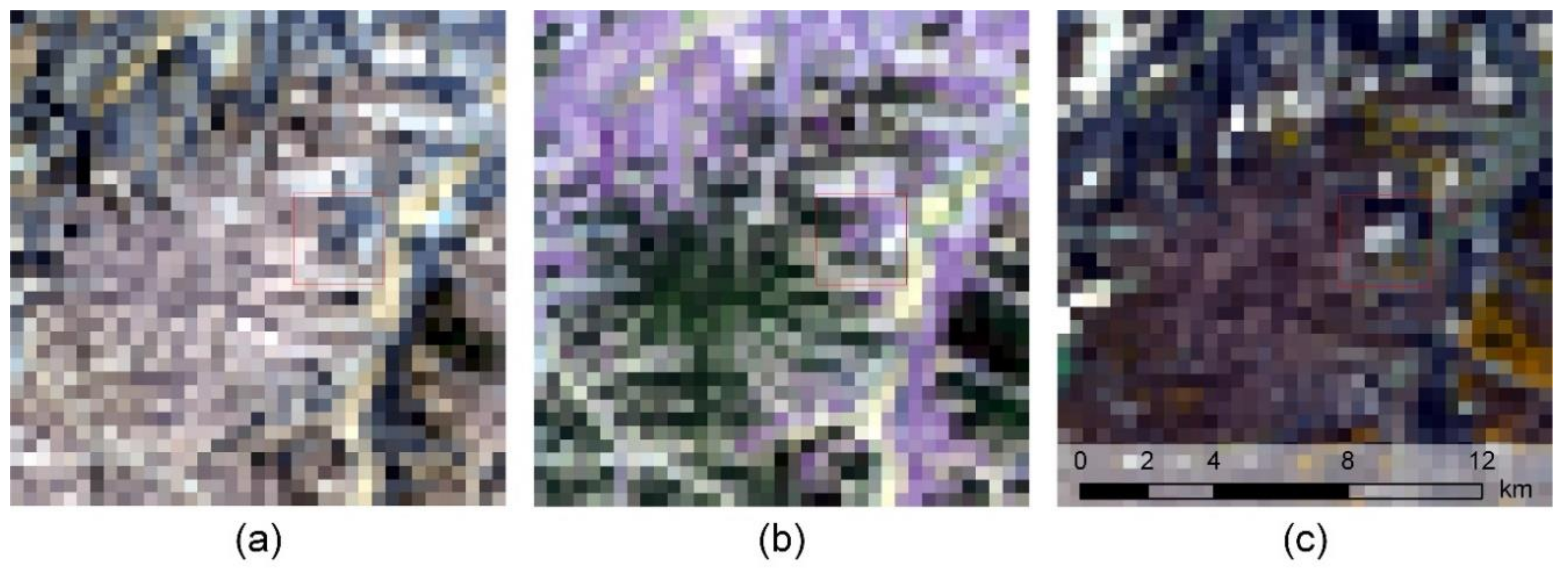
29]. Besides the aforementioned Sentinel 2 and Landsat 8 images, we further simulated a set of 480 m-resolution MODIS images by resampling the Landsat 8 images using the ENVI Software (
Figure 4). This is a commonly used method for validating spatiotemporal data-fusion algorithms, because it can avoid the registration errors brought by real images [
30]. The eCognition Developer 8.7 software was used to segment objects from the Sentinel 2 image on 25 April 2018 and the Landsat 8 image on 24 April 2018. The segmentation scales were set as the Level 1, Level 2 and Level 3 derived from the ESP 2 tool (with a step size is 1, 3 and 5) respectively. The segmented objects from the Sentinel 2 image were used as the inputs for the fusion between Sentinel 2 and Landsat 8 images and between Sentinel 2 and MODIS images, and those from Landsat 8 images were used as the inputs for the fusion between Landsat 8 and MODIS images.
3.3. Experimental Setup and Accuracy Assessment
To validate the performance of the proposed framework in the fusion of different dataset combinations, we run the STARFM, ESTARFM, FSDAF, OSTARFM, OESTARFM, and OFSDAF algorithms to fuse the Sentinel 2 data with Landsat 8 data, fuse the Landsat data with MODIS data, and fuse the Sentinel 2 data with MODIS data, respectively. For each data-fusion experiment, the search window size for the similar pixel selection was determined by a trial-and-error method [
31]. The window size was set as 4 ×
n + 1, where
n was iteratively increased from 1 to 10 with a step 1. The window size generating the highest fusion accuracy was used to run the corresponding pair of original and object-based spatiotemporal data-fusion algorithms.
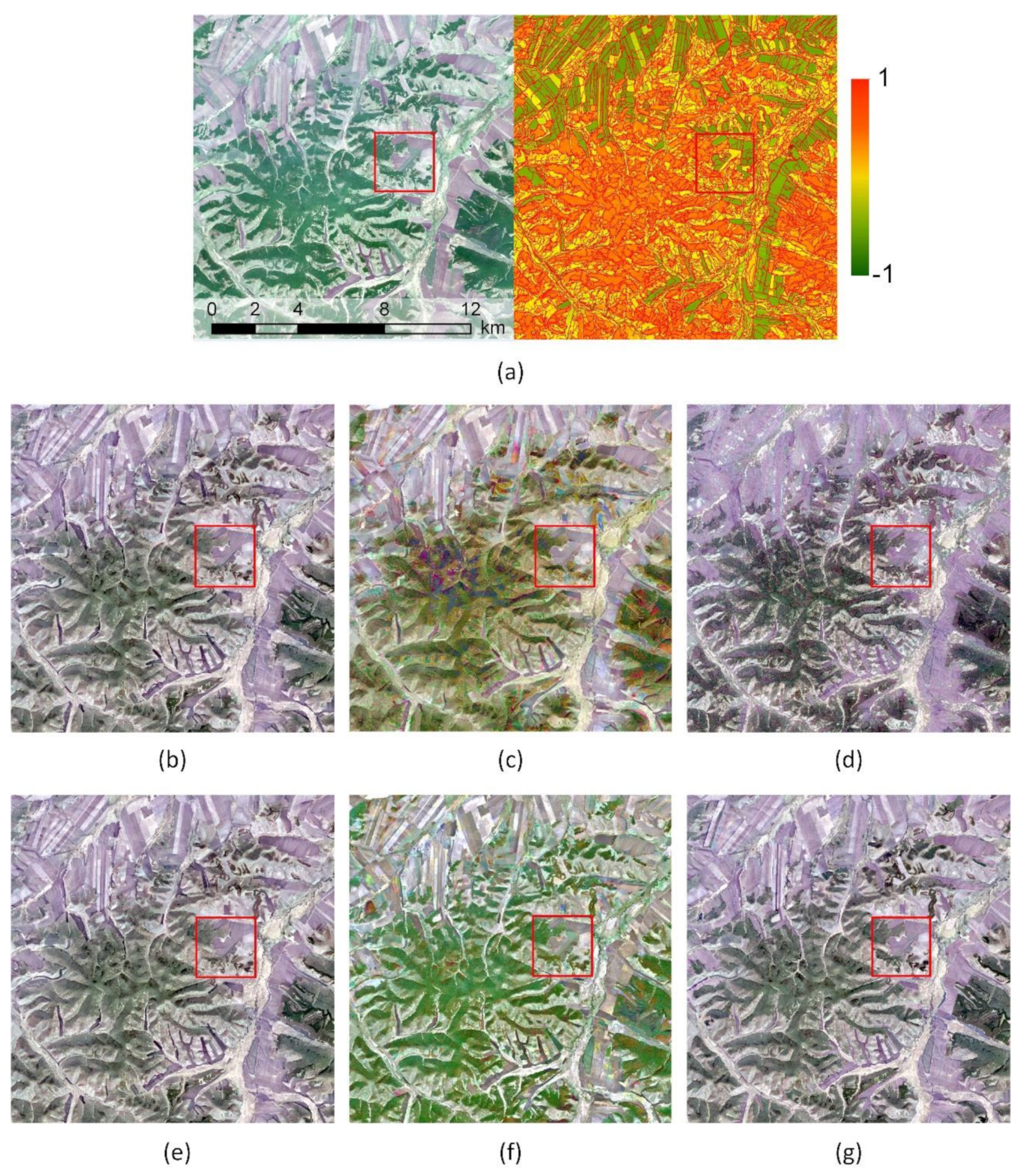
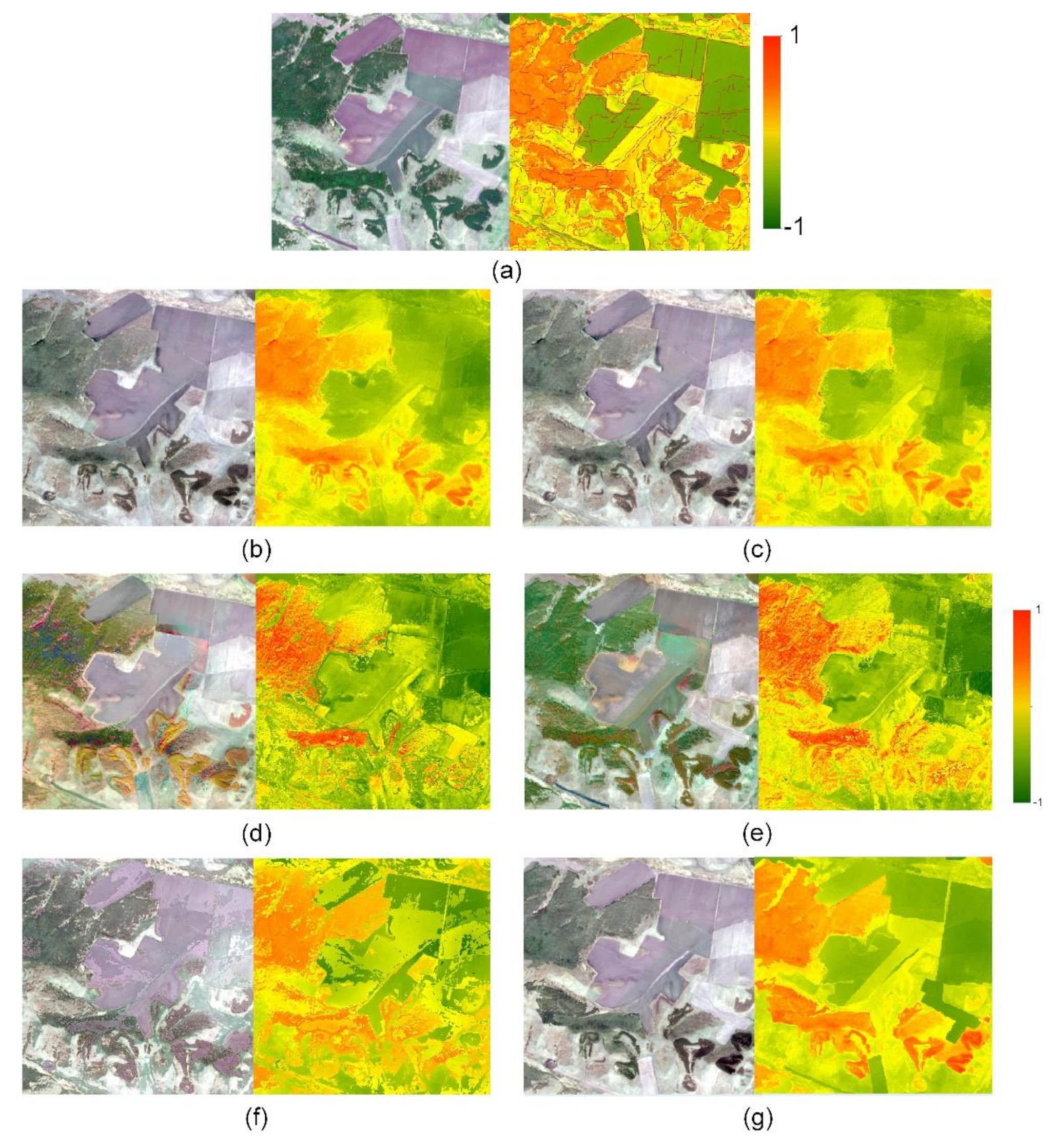
Each predicted image was visually compared to the observed image near the prediction date. Moreover, we calculated four statistics to evaluate quantitatively the fusion accuracy for each individual band (i.e., blue, green, red, and near-infrared/NIR) and normalized difference vegetation index (NDVI), namely the root-mean-square error (
RMSE), relative
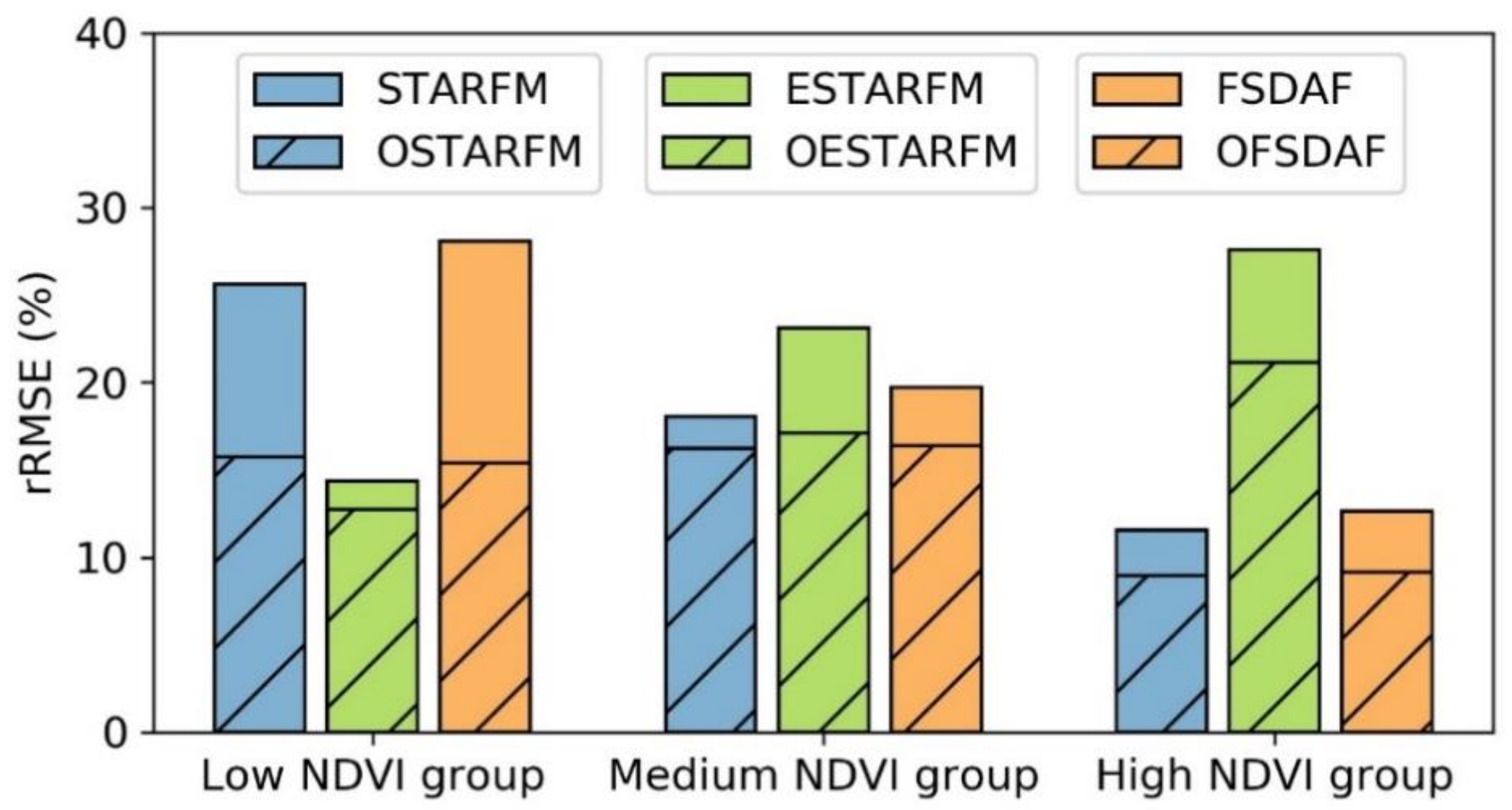
RMSE (
rRMSE), average absolute difference (
AAD), and Pearson correlation coefficient (
r). These four indices have been widely used in the previous studies [
13,
14].
RMSE and
rRMSE provide a global description of the radiometric difference between the predicted imagery and the real reference imagery,
AAD is used to measure the average bias for an individual prediction, and
r indicates the linear correlation between predicted imagery and the reference imagery. The mathematic definitions of these indices are shown in Equations (2)–(5):
where
N is the total number of pixels, and
j indicates the
band, and
and
are the values of the
pixel of
band in the predicted imagery and observed reference imagery.
3.4. Vegetation Mapping and Accuracy Assessment
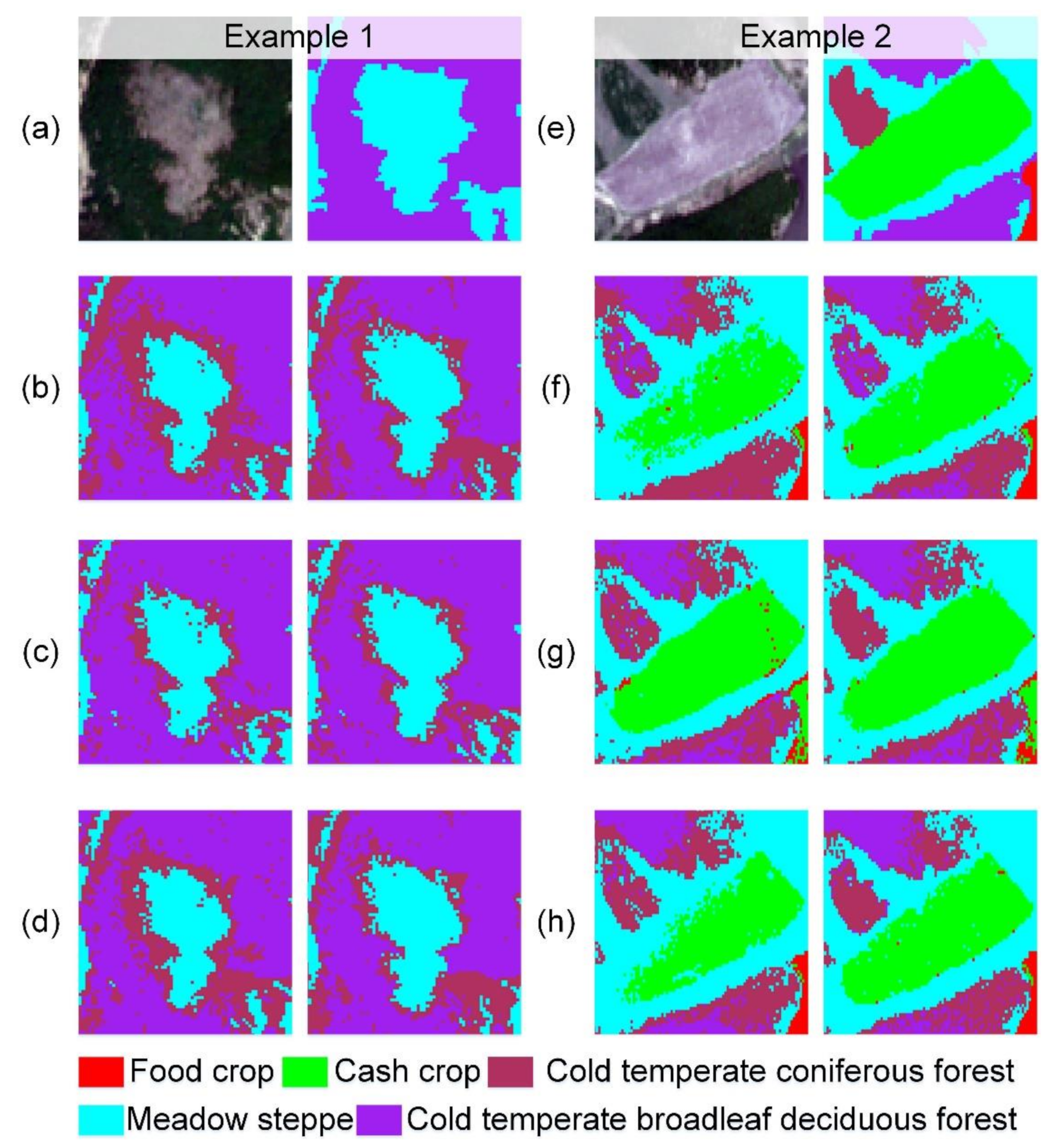
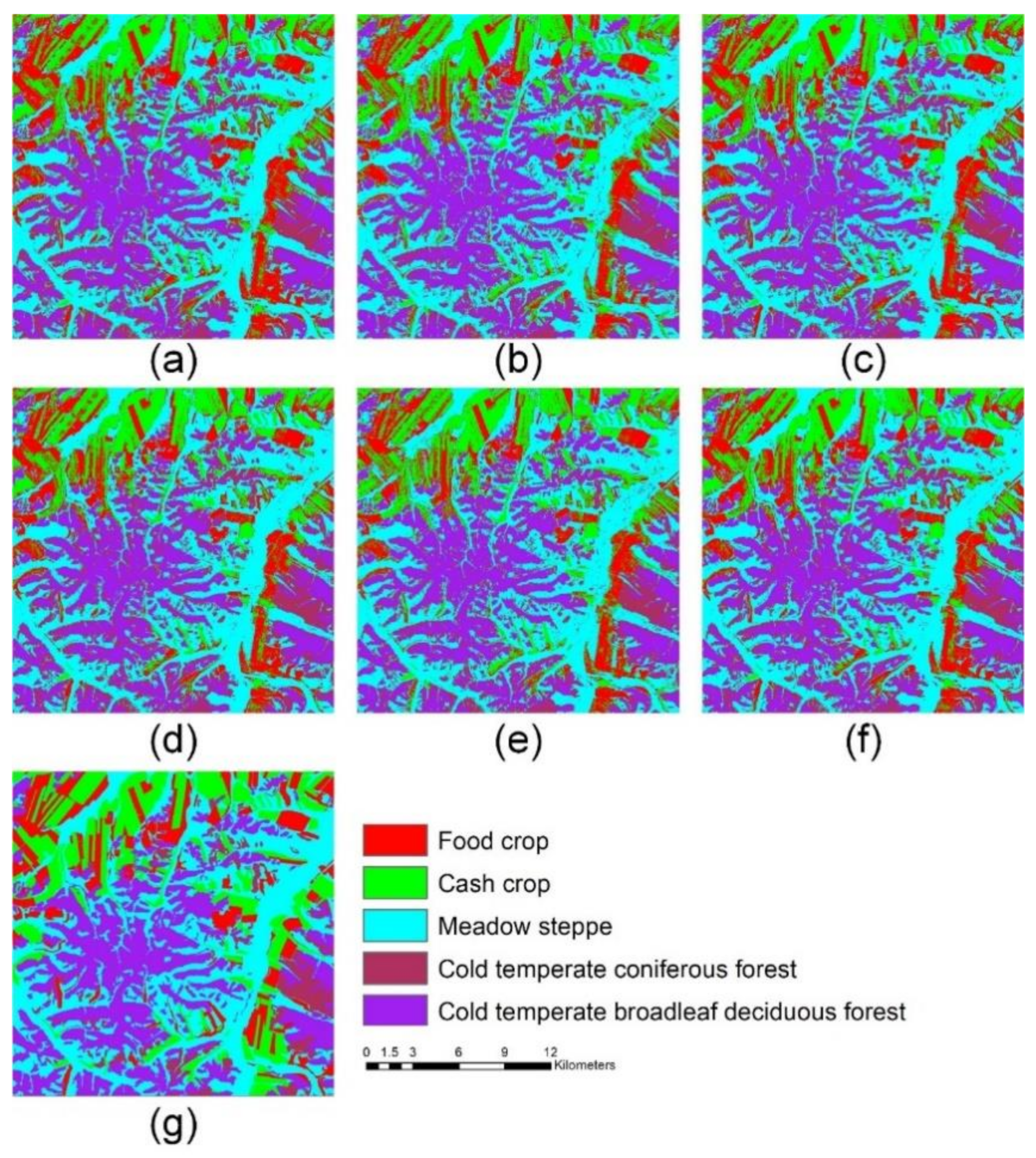
To test the potential of the proposed framework in vegetation mapping, we evaluated the performance differences on vegetation mapping using the fused Sentinel 2 images from both original and modified algorithms. The Support Vector Machine (SVM) algorithm was used to classify the study area into five vegetation types, which are food crops, cash crops, cold temperate coniferous forests, meadow steppes, and cold temperate broadleaf deciduous forests. The original Sentinel 2 image on 25 April 2018 and the fused Sentinel 2 image from Landsat 8 were used as the inputs of SVM classifier. The default SVM classifier with the radial basis function data on 26 May 2018 kernel type in the ENVI software was used here to perform all classifications.
The ground truth of vegetation map was created based on digitalization and validation process. First, we manually digitalized a vegetation map created by the local administration bureau. Then, all polygons within the digitalized map were surveyed in the field to validate its accuracy, and the final vegetation map include 572 polygons with a mean size of 0.623 km2. This vector map was then converted to a raster file with a spatial resolution of 10 m. Two thirds of pixels in the ground-truth vegetation map were used as the training samples to train the SVM classifier to generate vegetation maps from the fused images. The remaining one third of pixels were used to evaluate the accuracy of the predicted vegetation maps. Two statistical parameters, i.e., overall accuracy and kappa coefficient, were calculated to assess the accuracy of each predicted vegetation map.
6. Conclusions
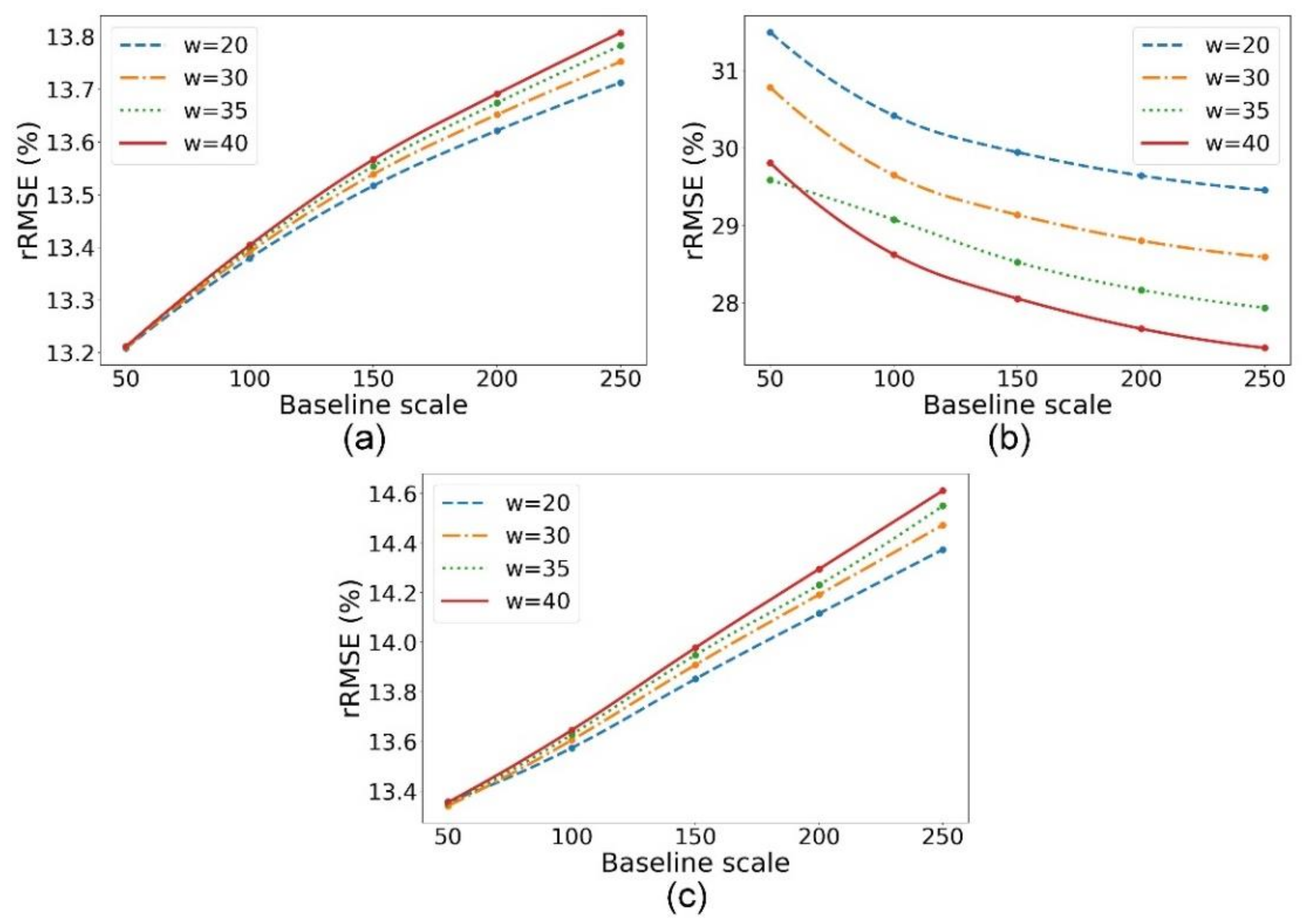
This study proposed a general object-based spatiotemporal data-fusion framework to improve the data-fusion accuracy in complex vegetated areas. It can be based on any spatiotemporal data-fusion algorithms by replacing their original similar pixel selection method with an object-restricted method. Here, we modified the STARFM, ESTARFM and FSDAF algorithms to evaluate the performance of the proposed framework. The results show that the object-based framework can improve the performance of all three methods by significantly reducing the “salt and pepper” effect in the fusion result and delineating the vegetation boundaries more clearly. Overall, the three object-based methods perform the best in the fusion of Sentinel-2 and Landsat images. The improvements in the vegetation-sensitive bands (e.g., red and NIR bands) are stronger than in other bands (e.g., blue and green bands). The baseline segmentation scale and the search window size are the two major factors influencing the performance of an object-based spatiotemporal data-fusion algorithm, and users should select the optimal values based on the similar pixel selection method. If an algorithm adopts a loose “select-and-restrict” similar pixel selection strategy, a relatively small baseline segmentation scale and search windows size should be used; if an algorithm adopts a tight “restrict-and-select” strategy, a relatively large baseline segmentation scale and search windows size should be used. Overall, the proposed object-based framework shows great potential for generating time series of remote-sensing images with high spatial resolutions in complex vegetated areas and, therefore, provides useful data sources for mapping vegetation attributes and monitoring vegetation changes accurately.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













