Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial Images



Abstract
1. Introduction
- We address the influence of ambiguity of regression-based OBB representation methods for oriented bounding box detection, and propose a mask-oriented bounding box representation (Mask OBB). As far as we know, we are the first to treat the multi-category oriented object detection in aerial images as a problem of pixel-level classification. Extensive experiments demonstrate its state-of-the-art performance on both DOTA and HRSC2016 datasets.
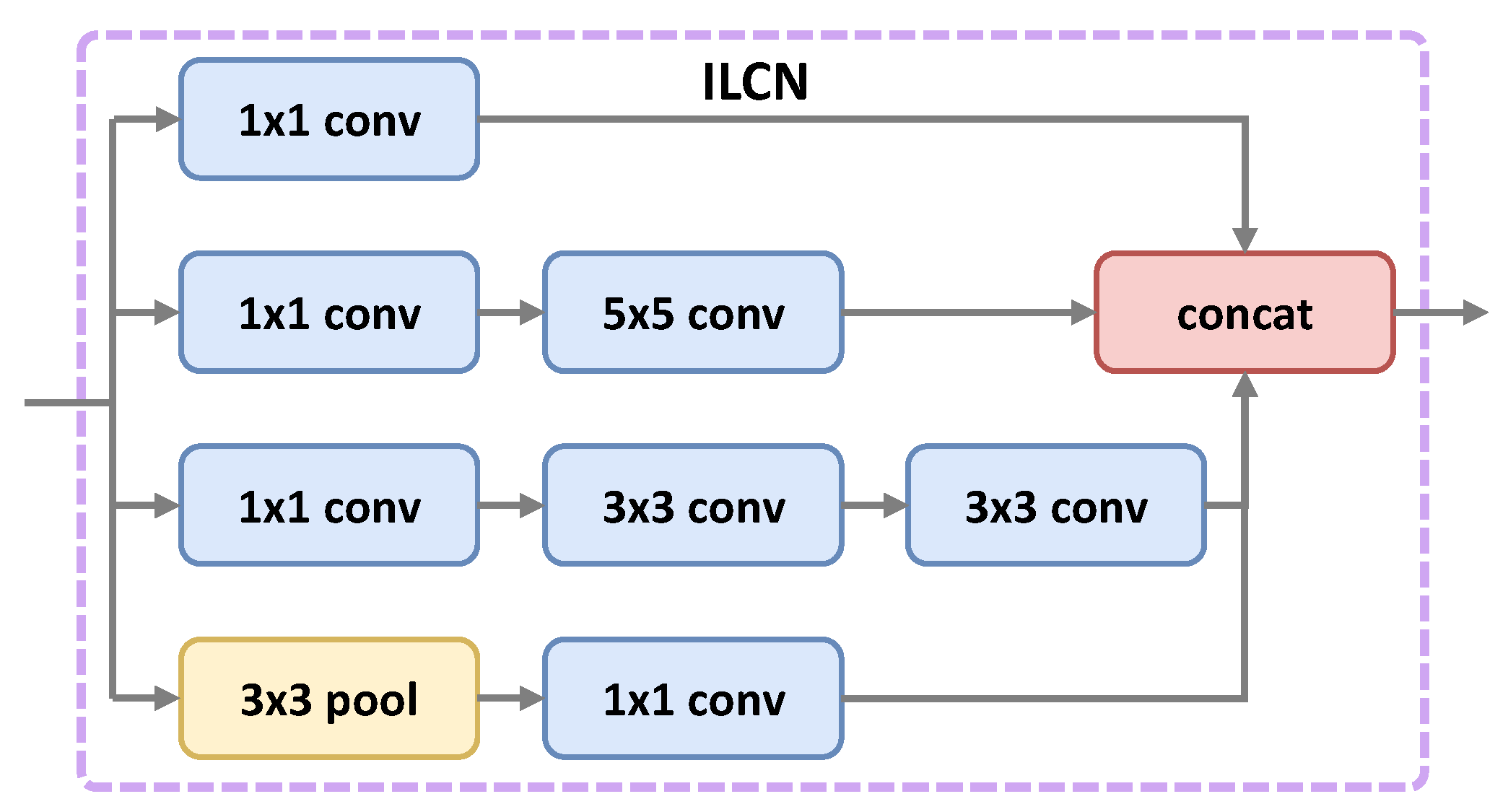
- We propose an Inception Lateral Connection Feature Pyramid Network (ILC-FPN), which can provide better features to handle huge scale changes of objects in aerial images.
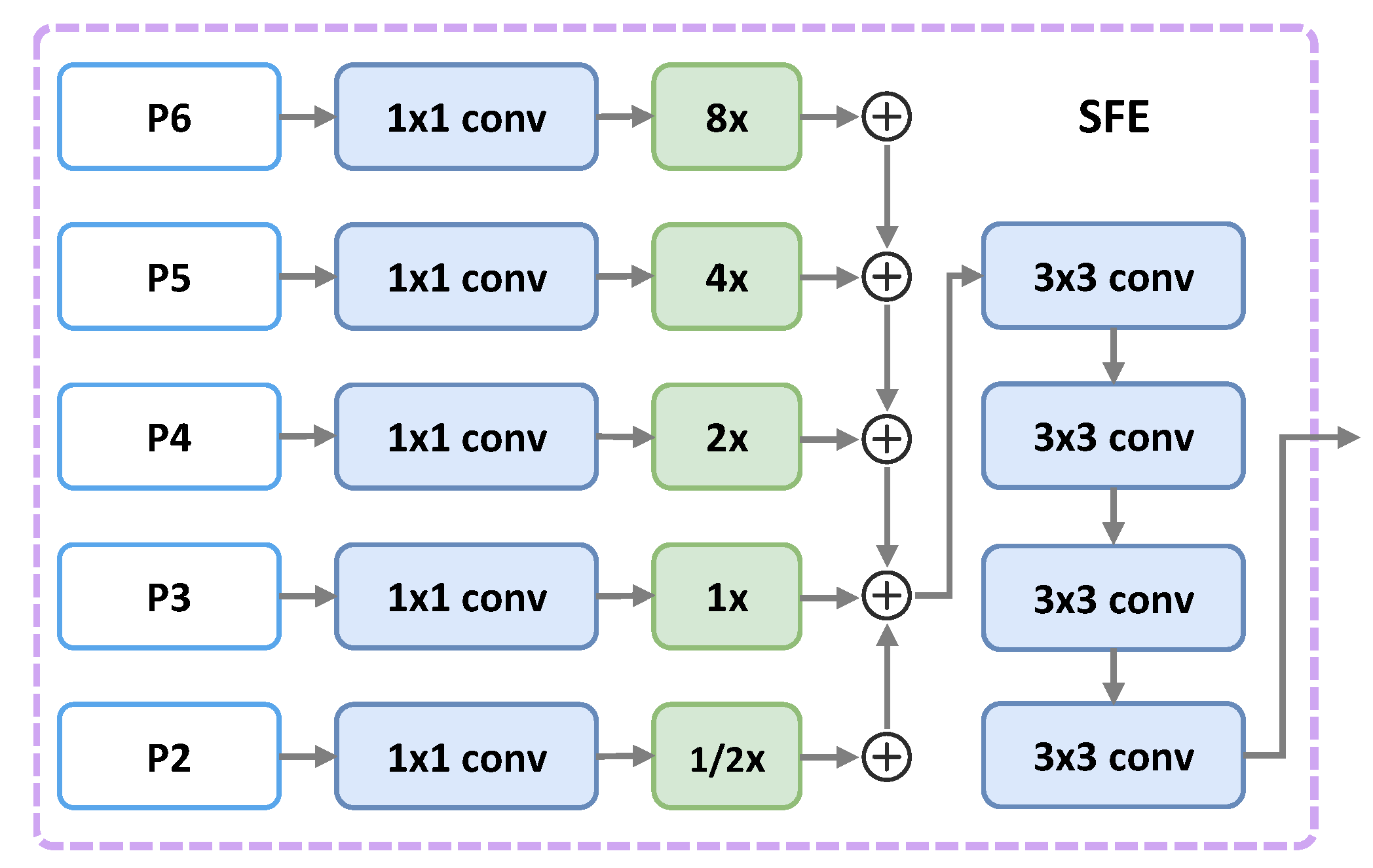
- We design a Semantic Attention Network (SAN) to distinguish interesting objects from cluttered background by providing semantic features when predicting HBBs and OBBs.
2. Methodology
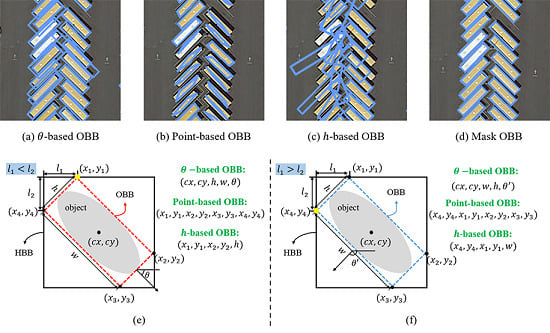
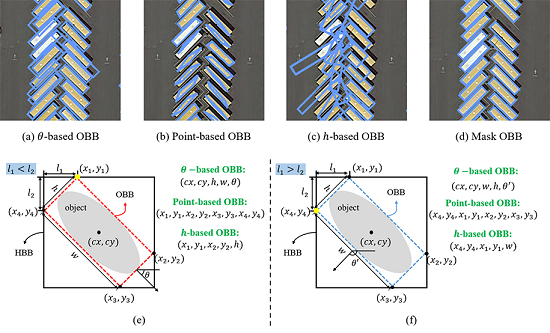
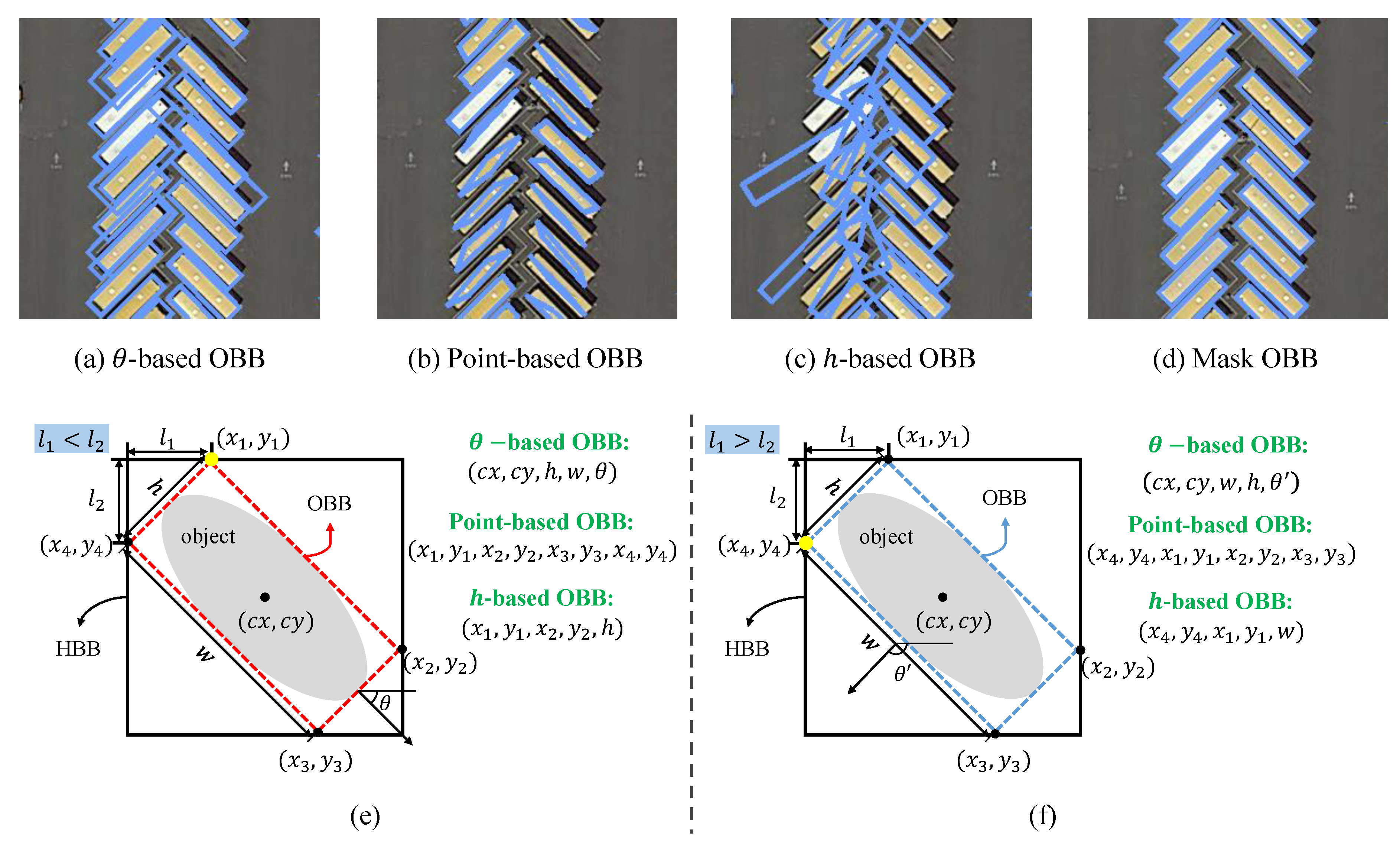
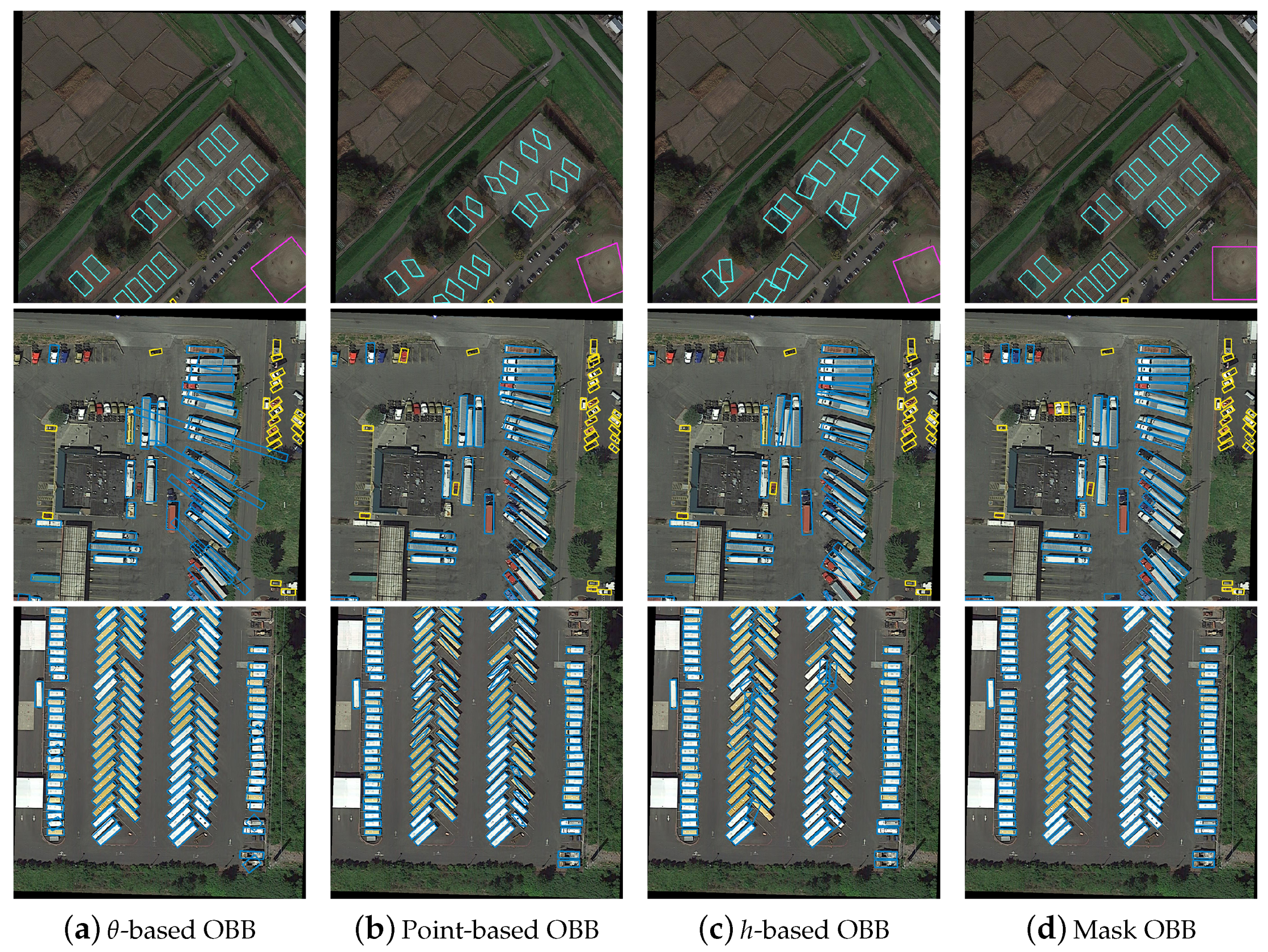
2.1. Regression-Based OBB Representations
2.2. Mask OBB Representation
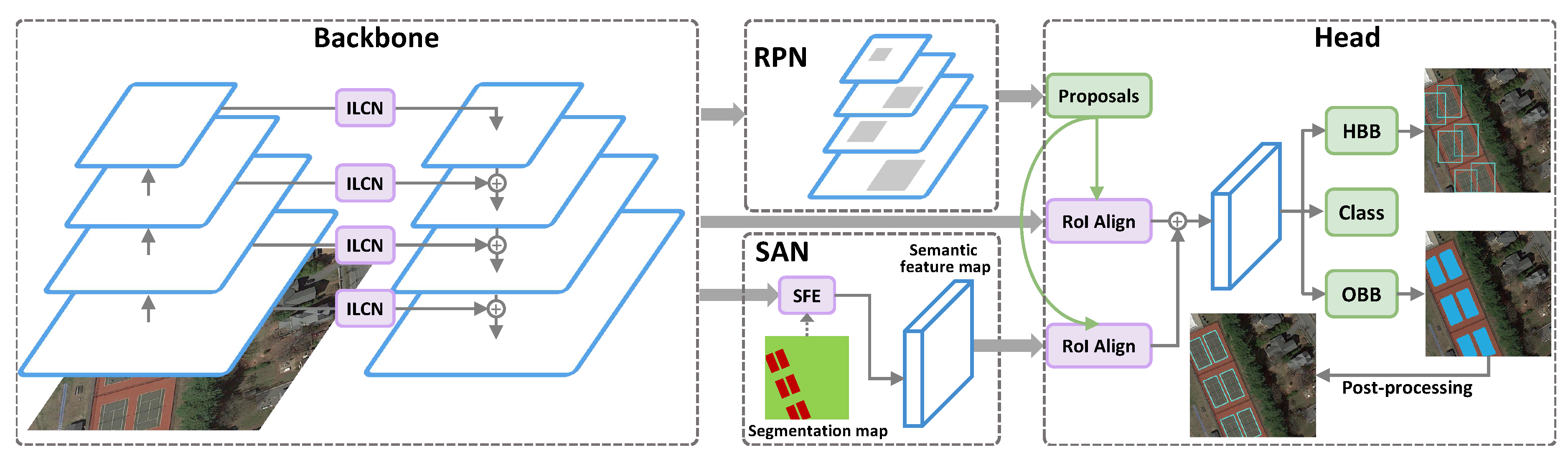
2.3. Overall Pipeline
2.4. Inception Lateral Connection Feature Pyramid Network
2.5. Semantic Attention Network
2.6. Multi-Task Learning
3. Experiments
3.1. Datasets and Evaluation Metrics
3.1.1. DOTA Dataset
3.1.2. HRSC2016 Dataset
3.1.3. Evaluation Metrics
3.2. Implementation Details
3.3. Comparison of Different OBB Representations
3.4. Comparison with State-of-the-Art Detectors
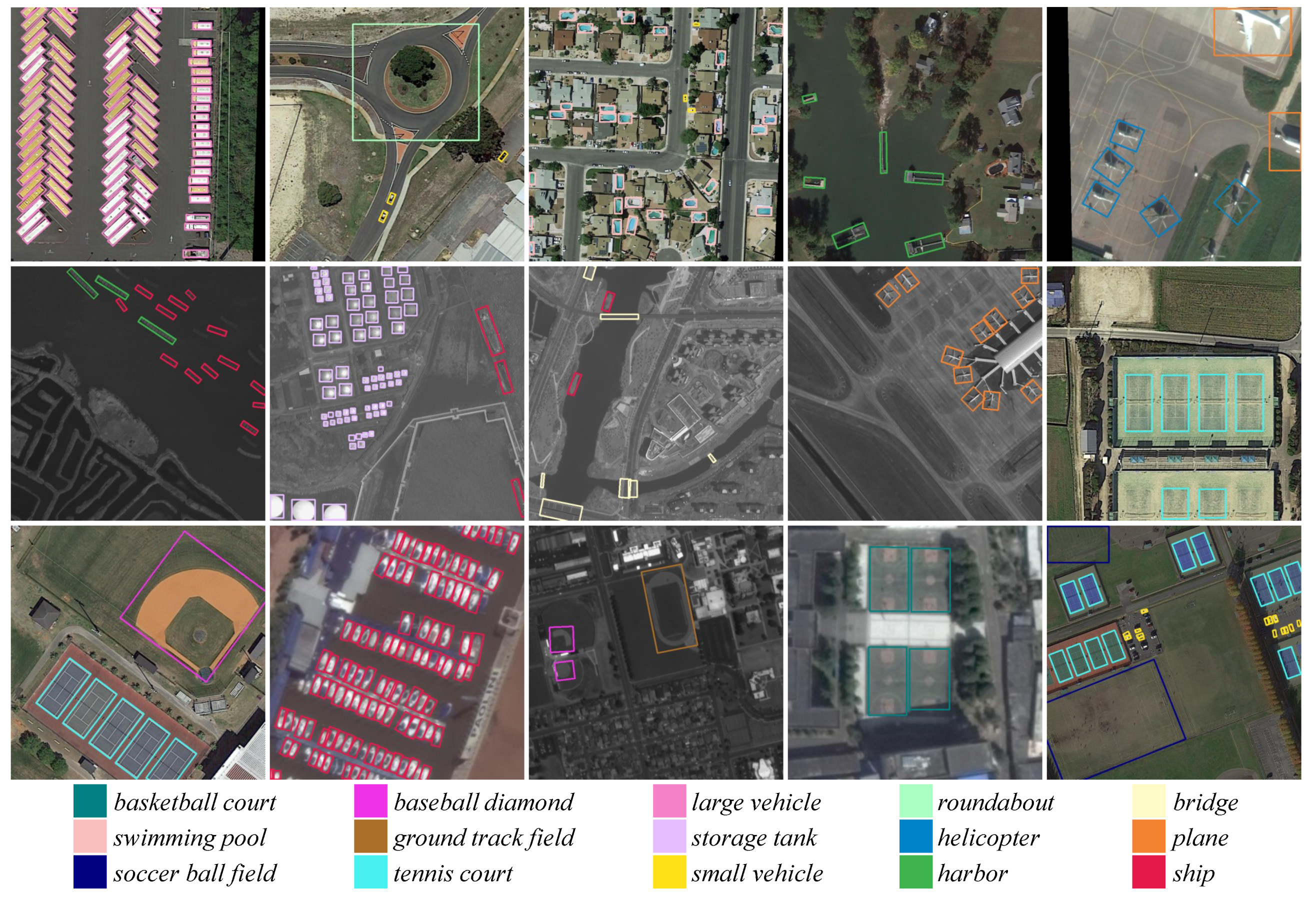
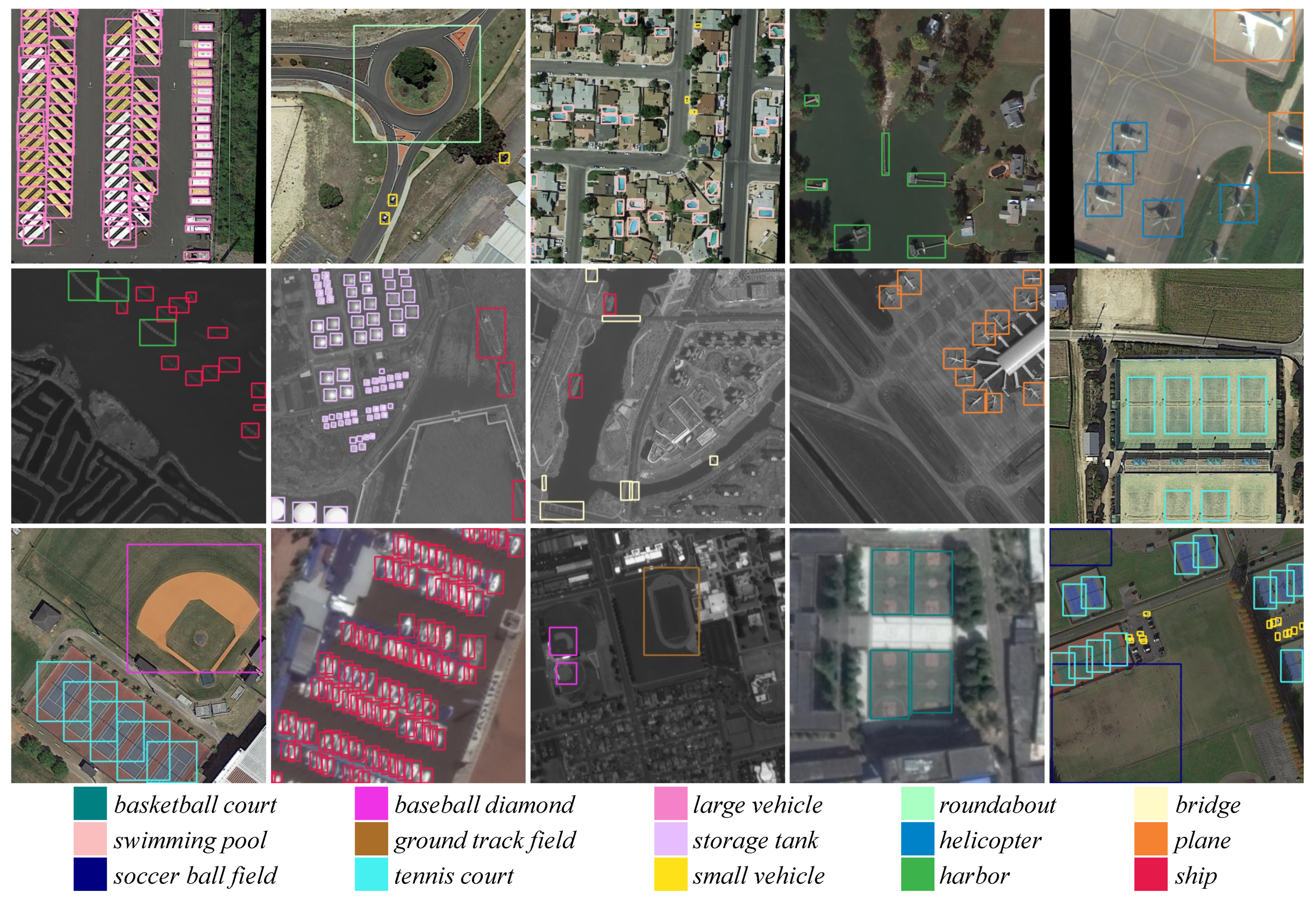
3.4.1. Results on DOTA Dataset
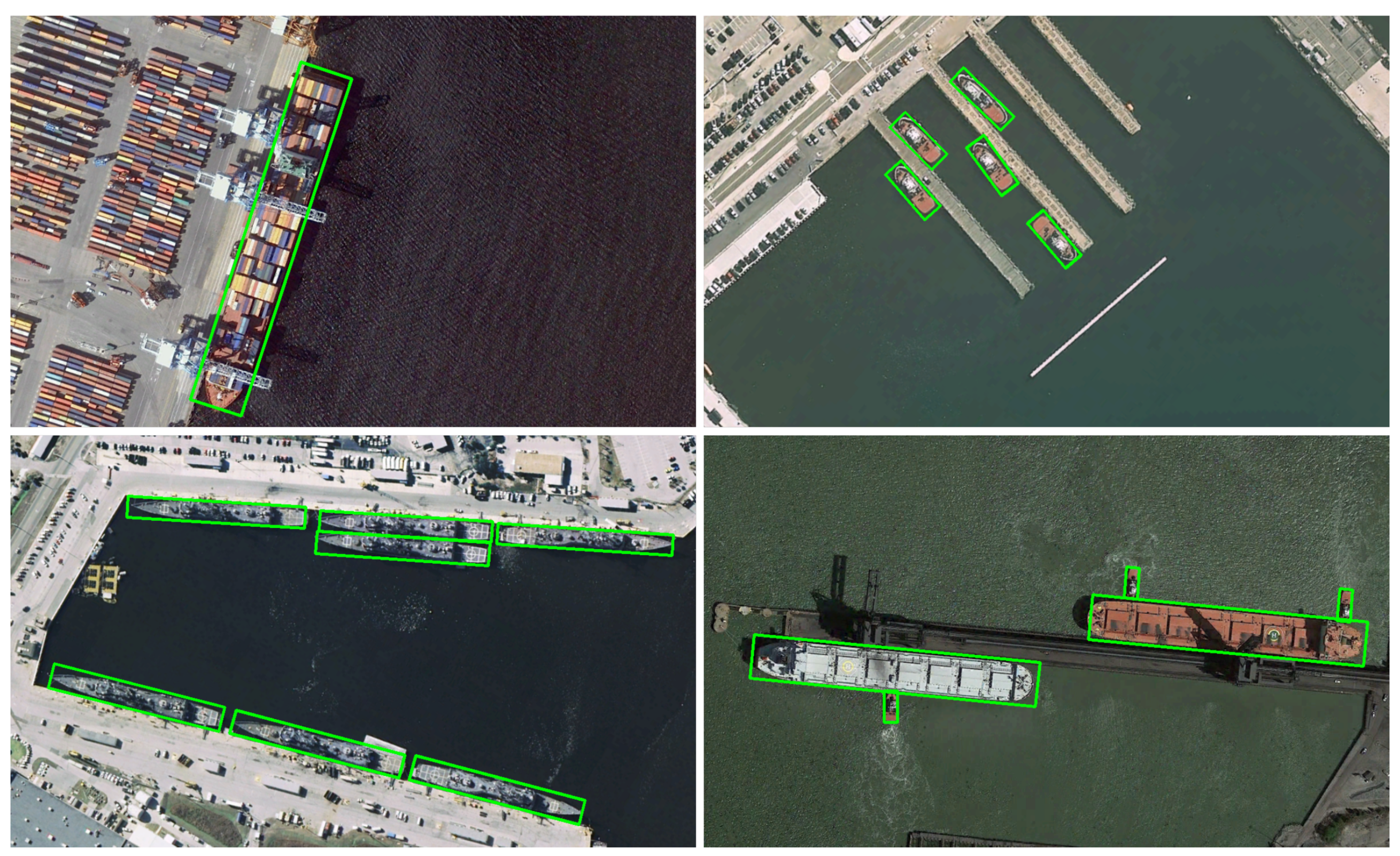
3.4.2. Results on HRSC2016 Dataset
4. Discussion
4.1. Ablation Study
4.2. Failure Cases
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ding, J.; Xue, N.; Long, Y.; Xia, G.S.; Lu, Q. Learning RoI Transformer for Detecting Oriented Objects in Aerial Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Los Angeles, CA, USA, 16–19 June 2019. [Google Scholar]
- Xia, G.S.; Bai, X.; Ding, J.; Zhu, Z.; Belongie, S.; Luo, J.; Datcu, M.; Pelillo, M.; Zhang, L. DOTA: A Large-Scale Dataset for Object Detection in Aerial Images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 3974–3983. [Google Scholar]
- Deng, Z.; Sun, H.; Zhou, S.; Zhao, J.; Lei, L.; Zou, H. Multi-scale object detection in remote sensing imagery with convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2018, 145, 3–22. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J. A survey on object detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2016, 117, 11–28. [Google Scholar] [CrossRef]
- Li, K.; Cheng, G.; Bu, S.; You, X. Rotation-insensitive and context-augmented object detection in remote sensing images. IEEE Trans. Geosci. Remote Sens. 2017, 56, 2337–2348. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Region-based convolutional networks for accurate object detection and segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 142–158. [Google Scholar] [CrossRef]
- Uijlings, J.R.; Van De Sande, K.E.; Gevers, T.; Smeulders, A.W. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 13–15 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Proceedings of the Advances in Neural Information Processing Systems (NeurIPS), Vancouver, BC, Canada, 8–14 December 2015; pp. 91–99. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. In Proceedings of the Advances in Neural Information Processing Systems (NeurIPS), Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Dai, J.; Qi, H.; Xiong, Y.; Li, Y.; Zhang, G.; Hu, H.; Wei, Y. Deformable convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 764–773. [Google Scholar]
- Li, Z.; Peng, C.; Yu, G.; Zhang, X.; Deng, Y.; Sun, J. Light-head r-cnn: In defense of two-stage object detector. arXiv 2017, arXiv:1711.07264. [Google Scholar]
- Singh, B.; Davis, L.S. An analysis of scale invariance in object detection snip. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 3578–3587. [Google Scholar]
- Singh, B.; Najibi, M.; Davis, L.S. SNIPER: Efficient multi-scale training. In Proceedings of the Advances in Neural Information Processing Systems (NeurIPS), Montréal, QC, Canada, 3–8 December 2018; pp. 9310–9320. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In European Conference on Computer Vision; Springer: Berlin, Germany, 2016; pp. 21–37. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Han, X.; Zhong, Y.; Zhang, L. An Efficient and Robust Integrated Geospatial Object Detection Framework for High Spatial Resolution Remote Sensing Imagery. Remote Sens. 2017, 9, 666. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, X.; Wang, L.; Yang, R.; Pu, F. Deformable convnet with aspect ratio constrained nms for object detection in remote sensing imagery. Remote Sens. 2017, 9, 1312. [Google Scholar] [CrossRef]
- Guo, W.; Yang, W.; Zhang, H.; Hua, G. Geospatial object detection in high resolution satellite images based on multi-scale convolutional neural network. Remote Sens. 2018, 10, 131. [Google Scholar] [CrossRef]
- Li, Q.; Mou, L.; Liu, Q.; Wang, Y.; Zhu, X.X. HSF-Net: Multiscale Deep Feature Embedding for Ship Detection in Optical Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2018, 56, 7147–7161. [Google Scholar] [CrossRef]
- Pang, J.; Li, C.; Shi, J.; Xu, Z.; Feng, H. R2-CNN: Fast Tiny Object Detection in Large-Scale Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5512–5524. [Google Scholar] [CrossRef]
- Dong, R.; Xu, D.; Zhao, J.; Jiao, L.; An, J. Sig-NMS-Based Faster R-CNN Combining Transfer Learning for Small Target Detection in VHR Optical Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8534–8545. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, H.; Weng, L.; Yang, Y. Ship rotated bounding box space for ship extraction from high-resolution optical satellite images with complex backgrounds. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1074–1078. [Google Scholar] [CrossRef]
- Razakarivony, S.; Jurie, F. Vehicle detection in aerial imagery: A small target detection benchmark. J. Vis. Commun. Image Represent. 2016, 34, 187–203. [Google Scholar] [CrossRef]
- Zhu, H.; Chen, X.; Dai, W.; Fu, K.; Ye, Q.; Jiao, J. Orientation robust object detection in aerial images using deep convolutional neural network. In Proceedings of the IEEE International Conference on Image Processing, Quebec City, QC, Canada, 27–30 September 2015; pp. 3735–3739. [Google Scholar]
- Liu, K.; Mattyus, G. Fast multiclass vehicle detection on aerial images. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1938–1942. [Google Scholar]
- Azimi, S.M.; Vig, E.; Bahmanyar, R.; Körner, M.; Reinartz, P. Towards multi-class object detection in unconstrained remote sensing imagery. arXiv 2018, arXiv:1807.02700. [Google Scholar]
- Liao, M.; Zhu, Z.; Shi, B.; Xia, G.S.; Bai, X. Rotation-Sensitive Regression for Oriented Scene Text Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2018; pp. 5909–5918. [Google Scholar]
- Li, Q.; Mou, L.; Xu, Q.; Zhang, Y.; Zhu, X.X. R3-Net: A Deep Network for Multi-oriented Vehicle Detection in Aerial Images and Videos. arXiv 2019, arXiv:1808.05560. [Google Scholar]
- Liu, L.; Pan, Z.; Lei, B. Learning a rotation invariant detector with rotatable bounding box. arXiv 2017, arXiv:1711.09405. [Google Scholar]
- Ma, J.; Shao, W.; Ye, H.; Wang, L.; Wang, H.; Zheng, Y.; Xue, X. Arbitrary-oriented scene text detection via rotation proposals. IEEE Trans. Multimed. 2018, 20, 3111–3122. [Google Scholar] [CrossRef]
- Yang, X.; Sun, H.; Fu, K.; Yang, J.; Sun, X.; Yan, M.; Guo, Z. Automatic ship detection in remote sensing images from google earth of complex scenes based on multiscale rotation dense feature pyramid networks. Remote Sens. 2018, 10, 132. [Google Scholar] [CrossRef]
- Dai, Y.; Huang, Z.; Gao, Y.; Xu, Y.; Chen, K.; Guo, J.; Qiu, W. Fused Text Segmentation Networks for Multi-oriented Scene Text Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Beijing, China, 20–24 August 2018; pp. 3604–3609. [Google Scholar]
- Lyu, P.; Liao, M.; Yao, C.; Wu, W.; Bai, X. Mask TextSpotter: An End-to-End Trainable Neural Network for Spotting Text with Arbitrary Shapes. In European Conference on Computer Vision; Springer: Berlin, Germany, 2018; pp. 71–88. [Google Scholar]
- Wang, J.; Ding, J.; Cheng, W.; Yang, W.; Xia, G. Mask-OBB: A Mask Oriented Bounding Box Representation for Object Detection in Aerial Images. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Lin, T.Y.; Dollar, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 26 June–1 July 2016; pp. 2818–2826. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, inception-resnet and the impact of residual connections on learning. In Proceedings of the National Conference on Artificial Intelligence, San Diego, CA, USA, 28–29 June 2017; pp. 4278–4284. [Google Scholar]
- Chaib, S.; Liu, H.; Gu, Y.; Yao, H. Deep Feature Fusion for VHR Remote Sensing Scene Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4775–4784. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Bell, S.; Zitnick, C.L.; Bala, K.; Girshick, R.B. Inside-Outside Net: Detecting Objects in Context with Skip Pooling and Recurrent Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 2874–2883. [Google Scholar]
- Wang, X.; Girshick, R.B.; Gupta, A.; He, K. Non-local Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7794–7803. [Google Scholar]
- Li, C.; Xu, C.; Cui, Z.; Wang, D.; Zhang, T.; Yang, J. Feature-Attentioned Object Detection in Remote Sensing Imagery. In Proceedings of the IEEE International Conference on Image Processing, Taipei, Taiwan, 22–25 September 2019; pp. 3886–3890. [Google Scholar]
- Zhang, G.; Lu, S.; Zhang, W. CAD-Net: A Context-Aware Detection Network for Objects in Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10015–10024. [Google Scholar] [CrossRef]
- Chen, J.; Wan, L.; Zhu, J.; Xu, G.; Deng, M. Multi-Scale Spatial and Channel-wise Attention for Improving Object Detection in Remote Sensing Imagery. IEEE Geosci. Remote Sens. Lett. 2019. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is All you Need. In Proceedings of the Advances in Neural Information Processing Systems (NeurIPS), Long Beach, CA, USA, 4–9 December 2017; pp. 5998–6008. [Google Scholar]
- Jiang, Y.; Zhu, X.; Wang, X.; Yang, S.; Li, W.; Wang, H.; Fu, P.; Luo, Z. R2CNN: Rotational region CNN for orientation robust scene text detection. arXiv 2017, arXiv:1706.09579. [Google Scholar]
- Suzuki, S.; Be, K.A. Topological structural analysis of digitized binary images by border following. Comput. Vis. Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Paszke, A.; Gross, S.; Chintala, S.; Chanan, G.; Yang, E.; DeVito, Z.; Lin, Z.; Desmaison, A.; Antiga, L.; Lerer, A. Automatic differentiation in PyTorch. In Proceedings of the Advances in Neural Information Processing Systems Workshop, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Girshick, R.; Iandola, F.; Darrell, T.; Malik, J. Deformable part models are convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 437–446. [Google Scholar]
- Yang, X.; Yang, J.; Yan, J.; Zhang, Y.; Zhang, T.; Guo, Z.; Sun, X.; Fu, K. SCRDet: Towards More Robust Detection for Small, Cluttered and Rotated Objects. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Bodla, N.; Singh, B.; Chellappa, R.; Davis, L.S. Soft-NMS–Improving Object Detection With One Line of Code. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 5561–5569. [Google Scholar]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated residual transformations for deep neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1492–1500. [Google Scholar]
- Yan, J.; Wang, H.; Yan, M.; Diao, W.; Sun, X.; Li, H. IoU-Adaptive Deformable R-CNN: Make Full Use of IoU for Multi-Class Object Detection in Remote Sensing Imagery. Remote Sens. 2019, 11, 286. [Google Scholar] [CrossRef]
- Liu, Z.; Hu, J.; Weng, L.; Yang, Y. Rotated region based CNN for ship detection. In Proceedings of the IEEE International Conference on Image Processing, Beijing, China, 17–20 September 2017; pp. 900–904. [Google Scholar]
- Zhang, Z.; Guo, W.; Zhu, S.; Yu, W. Toward Arbitrary-Oriented Ship Detection with Rotated Region Proposal and Discrimination Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1745–1749. [Google Scholar] [CrossRef]
- Koo, J.; Seo, J.; Jeon, S.; Choe, J.; Jeon, T. RBox-CNN: Rotated bounding box based CNN for ship detection in remote sensing image. In Proceedings of the International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 6–9 November 2018; pp. 420–423. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | First Vertex | OBB Representation | Backbone | OBB (%) | HBB (%) | Gap (%) |
|---|---|---|---|---|---|---|
| DOTA | extreme point | point-based OBB | ResNet-50-FPN | 64.40 | 68.72 | 4.32 |
| h-based OBB | ResNet-50-FPN | 62.95 | 70.73 | 7.78 | ||
| best point | point-based OBB | ResNet-50-FPN | 69.35 | 70.65 | 1.30 | |
| h-based OBB | ResNet-50-FPN | 67.36 | 70.46 | 3.10 |
| Implementations | OBB Representation | Backbone | OBB (%) | HBB (%) | Gap (%) |
|---|---|---|---|---|---|
| Ours | -based OBB | ResNet-50-FPN | 69.06 | 70.22 | 1.16 |
| point-based OBB | ResNet-50-FPN | 69.35 | 70.65 | 1.30 | |
| h-based OBB | ResNet-50-FPN | 67.36 | 70.46 | 3.10 | |
| Mask OBB | ResNet-50-FPN | 69.97 | 70.14 | 0.17 | |
| FR-O [2] | point-based OBB | ResNet-50-C4 | |||
| ICN [30] | point-based OBB | ResNet-50-FPN | |||
| SCRDet [59] | -based OBB | ResNet-101-FPN | |||
| Li et al. [49] | -based OBB | ResNet-101-FPN |
| Method | Backbone | FPN | PL | BD | BR | GTF | SV | LV | SH | TC | BC | ST | SBF | RA | HA | SP | HC | mAP |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SSD [18] | VGG-16 | - | 39.83 | 9.09 | 0.64 | 13.18 | 0.26 | 0.39 | 1.11 | 16.24 | 27.57 | 9.23 | 27.16 | 9.09 | 3.03 | 1.05 | 1.01 | 10.59 |
| YOLOv2 [16] | Darknet-19 | - | 39.57 | 20.29 | 36.58 | 23.42 | 8.85 | 2.09 | 4.82 | 44.34 | 38.35 | 34.65 | 16.02 | 37.62 | 47.23 | 25.5 | 7.45 | 21.39 |
| R-FCN [10] | ResNet-101 | - | 37.80 | 38.21 | 3.64 | 37.26 | 6.74 | 2.60 | 5.59 | 22.85 | 46.93 | 66.04 | 33.37 | 47.15 | 10.60 | 25.19 | 17.96 | 26.79 |
| FR-H [9] | ResNet-50 | - | 47.16 | 61.00 | 9.80 | 51.74 | 14.87 | 12.80 | 6.88 | 56.26 | 59.97 | 57.32 | 47.83 | 48.70 | 8.23 | 37.25 | 23.05 | 32.29 |
| FR-O [2] | ResNet-50 | - | 79.09 | 69.12 | 17.17 | 63.49 | 34.20 | 37.16 | 36.20 | 89.19 | 69.60 | 58.96 | 49.40 | 52.52 | 46.69 | 44.80 | 46.30 | 52.93 |
| R-DFPN [35] | ResNet-101 | ✓ | 80.92 | 65.82 | 33.77 | 58.94 | 55.77 | 50.94 | 54.78 | 90.33 | 66.34 | 68.66 | 48.73 | 51.76 | 55.10 | 51.32 | 35.88 | 57.94 |
| RCNN [53] | ResNet-101 | - | 80.94 | 65.67 | 35.34 | 67.44 | 59.92 | 50.91 | 55.81 | 90.67 | 66.92 | 72.39 | 55.06 | 52.23 | 55.14 | 53.35 | 48.22 | 60.67 |
| RRPN [34] | ResNet-101 | - | 88.52 | 71.20 | 31.66 | 59.30 | 51.85 | 56.19 | 57.25 | 90.81 | 72.84 | 67.38 | 56.69 | 52.84 | 53.08 | 51.94 | 53.58 | 61.01 |
| ICN [30] | ResNet-101 | ✓ | 81.40 | 74.30 | 47.70 | 70.30 | 64.90 | 67.80 | 70.00 | 90.80 | 79.10 | 78.20 | 53.60 | 62.90 | 67.00 | 64.20 | 50.20 | 68.20 |
| RoI Trans. [1] | ResNet-101 | ✓ | 88.64 | 78.52 | 43.44 | 75.92 | 68.81 | 73.68 | 83.59 | 90.74 | 77.27 | 81.46 | 58.39 | 53.54 | 62.83 | 58.93 | 47.67 | 69.56 |
| SCRDet [59] | ResNet-101 | ✓ | 89.98 | 80.65 | 52.09 | 68.36 | 68.36 | 60.32 | 72.41 | 90.85 | 87.94 | 86.86 | 65.02 | 66.68 | 66.25 | 68.24 | 65.21 | 72.61 |
| Li et al. [49] | ResNet-101 | ✓ | 90.21 | 79.58 | 45.49 | 76.41 | 73.18 | 68.27 | 79.56 | 90.83 | 83.40 | 84.68 | 53.40 | 65.42 | 74.17 | 69.69 | 64.86 | 73.28 |
| Ours | ResNet-50 | ✓ | 89.61 | 85.09 | 51.85 | 72.90 | 75.28 | 73.23 | 85.57 | 90.37 | 82.08 | 85.05 | 55.73 | 68.39 | 71.61 | 69.87 | 66.33 | 74.86 |
| Ours | ResNeXt-101 | ✓ | 89.56 | 85.95 | 54.21 | 72.90 | 76.52 | 74.16 | 85.63 | 89.85 | 83.81 | 86.48 | 54.89 | 69.64 | 73.94 | 69.06 | 63.32 | 75.33 |
| Method | Backbone | FPN | PL | BD | BR | GTF | SV | LV | SH | TC | BC | ST | SBF | RA | HA | SP | HC | mAP |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SSD [18] | VGG-16 | - | 57.85 | 32.79 | 16.14 | 18.67 | 0.05 | 36.93 | 24.74 | 81.16 | 25.10 | 47.47 | 11.22 | 31.53 | 14.12 | 9.09 | 0.00 | 29.86 |
| YOLOv2 [16] | Darknet-19 | - | 76.90 | 33.87 | 22.73 | 34.88 | 38.73 | 32.02 | 52.37 | 61.65 | 48.54 | 33.91 | 29.27 | 36.83 | 36.44 | 38.26 | 11.61 | 39.20 |
| R-FCN [10] | ResNet-101 | - | 81.01 | 58.96 | 31.64 | 58.97 | 49.77 | 45.04 | 49.29 | 68.99 | 52.07 | 67.42 | 41.83 | 51.44 | 45.15 | 53.30 | 33.89 | 52.58 |
| FR-H [9] | ResNet-50 | - | 80.32 | 77.55 | 32.86 | 68.13 | 53.66 | 52.49 | 50.04 | 90.41 | 75.05 | 59.59 | 57.00 | 49.81 | 61.69 | 56.46 | 41.85 | 60.46 |
| FPN [39] | ResNet-50 | ✓ | 88.70 | 75.10 | 52.60 | 59.20 | 69.40 | 78.80 | 84.50 | 90.60 | 81.30 | 82.60 | 52.50 | 62.10 | 76.60 | 66.30 | 60.10 | 72.00 |
| ICN [30] | ResNet-101 | ✓ | 90.00 | 77.70 | 53.40 | 73.30 | 73.50 | 65.00 | 78.20 | 90.80 | 79.10 | 84.80 | 57.20 | 62.10 | 73.50 | 70.20 | 58.10 | 72.50 |
| IoU-Adaptive [62] | ResNet-101 | ✓ | 88.62 | 80.22 | 53.18 | 66.97 | 76.30 | 72.59 | 84.07 | 90.66 | 80.95 | 76.24 | 57.12 | 66.65 | 74.08 | 66.36 | 56.85 | 72.72 |
| SCRDet [59] | ResNet-101 | ✓ | 90.18 | 81.88 | 55.30 | 73.29 | 72.09 | 77.65 | 78.06 | 90.91 | 82.44 | 86.39 | 64.53 | 63.45 | 75.77 | 78.21 | 60.11 | 75.35 |
| Li et al. [49] | ResNet-101 | ✓ | 90.15 | 78.60 | 51.92 | 75.23 | 73.60 | 71.27 | 81.41 | 90.85 | 83.94 | 84.77 | 58.91 | 65.65 | 76.92 | 79.36 | 68.17 | 75.38 |
| Ours | ResNet-50 | ✓ | 89.60 | 85.82 | 56.50 | 71.18 | 77.62 | 70.45 | 85.04 | 90.18 | 80.10 | 85.30 | 56.60 | 69.43 | 75.45 | 76.71 | 69.70 | 75.98 |
| Ours | ResNeXt-101 | ✓ | 89.69 | 87.07 | 58.51 | 72.04 | 78.21 | 71.47 | 85.20 | 89.55 | 84.71 | 86.76 | 54.38 | 70.21 | 78.98 | 77.46 | 70.40 | 76.98 |
| Method | mAP (%) |
|---|---|
| BL2 [63] | 69.6 |
| RC1 [63] | 75.7 |
| RC2 [63] | 75.7 |
| [64] | 79.6 |
| RRD [31] | 84.3 |
| RoI Trans. [1] | 86.2 |
| RBOX-CNN [65] | 91.9 |
| Ours | 96.7 |
| Dataset | Algorithm | OBB (%) | HBB (%) |
|---|---|---|---|
| DOTA | baseline | 69.97 | 70.14 |
| baseline + ILC-FPN | 71.09 () | 71.61 () | |
| baseline + SAN | 70.69 () | 72.02 () | |
| baseline + ILC-FPN + SAN | 71.43 () | 72.41 () |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Ding, J.; Guo, H.; Cheng, W.; Pan, T.; Yang, W. Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial Images. Remote Sens. 2019, 11, 2930. https://doi.org/10.3390/rs11242930
Wang J, Ding J, Guo H, Cheng W, Pan T, Yang W. Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial Images. Remote Sensing. 2019; 11(24):2930. https://doi.org/10.3390/rs11242930
Chicago/Turabian StyleWang, Jinwang, Jian Ding, Haowen Guo, Wensheng Cheng, Ting Pan, and Wen Yang. 2019. "Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial Images" Remote Sensing 11, no. 24: 2930. https://doi.org/10.3390/rs11242930
APA StyleWang, J., Ding, J., Guo, H., Cheng, W., Pan, T., & Yang, W. (2019). Mask OBB: A Semantic Attention-Based Mask Oriented Bounding Box Representation for Multi-Category Object Detection in Aerial Images. Remote Sensing, 11(24), 2930. https://doi.org/10.3390/rs11242930