1. Introduction
The emergence of synthetic aperture radar (SAR)-based Earth Observation (EO) satellites over the last decades has led to the development of powerful new methods for monitoring the Earth’s surface. This is particularly true in the case of monitoring and assessing the impacts of natural hazards [
1,
2,
3]. SAR satellites observe the Earth’s surface independent of weather conditions and time of day, as the active radar signal does not depend on daylight and penetrates cloud cover with minimal atmospheric interaction [
4]. This is especially an advantage in assessing natural hazards associated with heavy precipitation, such as flooding and rainfall-triggered landslides, debris flows, and mudflows, when persistent cloud-cover may render optical satellite observations of limited use [
2]. Interferometric SAR (InSAR) coherence, or the correlation between two images, is a widely used metric derived from SAR images, e.g., [
5]. Because coherence loss between two images with a similar spatial footprint collected at different times results from changes at the Earth’s surface, it is a particularly useful metric to map where potential damage has occurred following natural hazard or meteorological events [
6,
7,
8,
9].
Mapping potential damage following a natural hazard event is generally performed via a comparison of pre-event and syn-event (i.e., comparison of one SAR image before and one image after the event) coherence images. The resulting map of coherence loss provides a spatial estimate of where damage may have occurred. Coherence studies using this approach for the purpose of surface damage monitoring have typically used the longer-wavelength L-band radar systems (e.g., the Japanese ALOS satellites) [
6,
10,
11], which are less sensitive to surficial changes and partially penetrate through ephemeral and variable surface features such as vegetation cover. The shorter wavelength X-band radar systems (e.g., TerraSAR-X [
12] or COSMO-SkyMed [
13]) are sensitive SAR systems for urban or vegetation-free areas. However, access to SAR data from current X- and L-band systems is limited by availability and expense, restricting the applicability of SAR coherence estimates of areas affected following a natural hazard and are not easily accessible for continuous monitoring. Furthermore, relying on a single pre-event coherence estimate (i.e., from a single SAR pair) neglects the natural variability in the SAR coherence signal through time for different land covers or climatic regions. This is now changing following the launch in 2014 of the European Space Agency (ESA) Sentinel-1 satellites. The Sentinel-1 satellites are equipped with C-band radar and offer near global coverage with a relatively high repeat time (6–12 days). Sentinel-1 data are freely available as part of the ESA Copernicus program [
14,
15]. Despite these advantages, however, the C-band radar presents potential challenges for Earth surface observation due to its higher sensitivity to surficial changes and vegetation cover, which can provide a noisier signal, particularly in regions with high or seasonal vegetation coverage.
In this study, we present a method that takes advantage of the high accessibility and high frequency of repeated observations of Sentinel-1 radar for natural hazard monitoring and assessment, while mitigating the inherent noisiness of the C-band radar system. Following previous methods for potential damage mapping, such as the NASA Damage Proxy Map [
6] and the Earthquake Damage Visualisation method [
11], we compare syn-event coherence related to a natural hazard event to pre-event coherence. However, rather than relying on a single estimate of pre-event coherence, we take advantage of the wealth of Sentinel-1 data to characterise the statistical character of pre-event coherence through time for each pixel.
For the first time, the Sentinel-1 system allows for the construction of large time series and databases of SAR data that may not be financially feasible with costlier commercial satellite systems for many institutions. By constructing a time series of SAR coherence data for a region of interest, we suggest a methodology that focuses on three critical objectives: (1) Deriving a more complete distribution of coherence values through SAR time series analysis for each pixel to decipher more accurately anomalous events; (2) Using this distribution, to identify time periods or seasons most suitable for the detection of anomalous, landscape-changing events; (3) Based on the distribution, to derive different significance levels of coherence thresholds to identify natural hazards. Regions where coherence loss exceeds a given threshold are considered Potentially Affected Areas (PAAs). The threshold for this determination is calculated dynamically from the time series; for example, this can be set as the 5th percentile of the pixel’s coherence distribution.
We apply the method to two independent case studies: the 2017 Mw 7.2 earthquake on the Iran-Iraq border, and in the landslide-prone Quebrada del Toro in the south-central Andes in rural, northwestern Argentina. Additional data, such as settlement locations, population, and/or infrastructure, can be included to assess potential human and economic impacts from natural hazard events and prioritise potentially affected regions. Thus, we present a framework where users can create a rapid assessment of potentially affected areas and employ case-specific information to filter, rank, and interpret the potential damages following a natural hazard event.
2. Methods
2.1. InSAR Coherence Measurements
SAR systems are active radar systems in the microwave spectrum that transmit and receive reflected waves from the Earth’s surface. The SAR signal consists of an amplitude (i.e., return strength) and phase (i.e., phase offset of a sinusoidal wave). Each pixel of a SAR image is a complex number, where the wave is represented by a real and imaginary part corresponding to respective amplitude and phase values, e.g., [
16]. In order to compare two SAR scenes and calculate coherence, the scenes need to be precisely aligned to each other, where the secondary scene (date 2) is usually resampled to the primary scene (date 1). We rely on a zero-doppler scene-pair geometry and baselines of Sentinel-1 imagery are generally low (<200 m) and geared toward radar interferometry. The coherence between two SAR images is the normalised complex correlation coefficient,
where
s1,
s2 are the complex pixel values at times t = 1 and t = 2;
s* is the complex conjugate of
s; and 〈〉 is the ensemble average [
5,
17]. Coherence is a normalised metric and values range from 0 to 1, where 1 represents perfect coherence, which in reality is rarely observed. Coherence is sensitive to changes to either the phase or amplitude of a pixel. For example, change in surface elevation (e.g., destruction of a building), backscattering properties (e.g., vegetation growth or removal), or the dielectric character of the surface (e.g., wet versus dry soil) will result in coherence loss [
17]. Therefore, it is important to note that coherence values result in a spatial and temporal estimate of where and when change has occurred, but cannot constrain the type or rate of change.
We calculated the physiographic coherence between two images using the InSAR Scientific Computing Environment (ISCE) from the NASA Jet Propulsion Laboratory [
18,
19,
20]. SAR images were multi-looked to 30 × 30 m by 12 range, 2 azimuth multi-looking of ~3 × ~20 m data, and topographically corrected using the Shuttle Radar Topography Radar Mission (SRTM) 1-arcsecond (~30 m) global Digital Elevation Model (DEM) [
21]. To create the database for a region, coherence was calculated for every adjacent pair in a time series (e.g., date-1 & date-2, date-2 & date 3, …, date-n & date-n + 1) to measure the coherence with the lowest possible temporal baseline.
2.2. Algorithm for Potentially Affected Area Detection
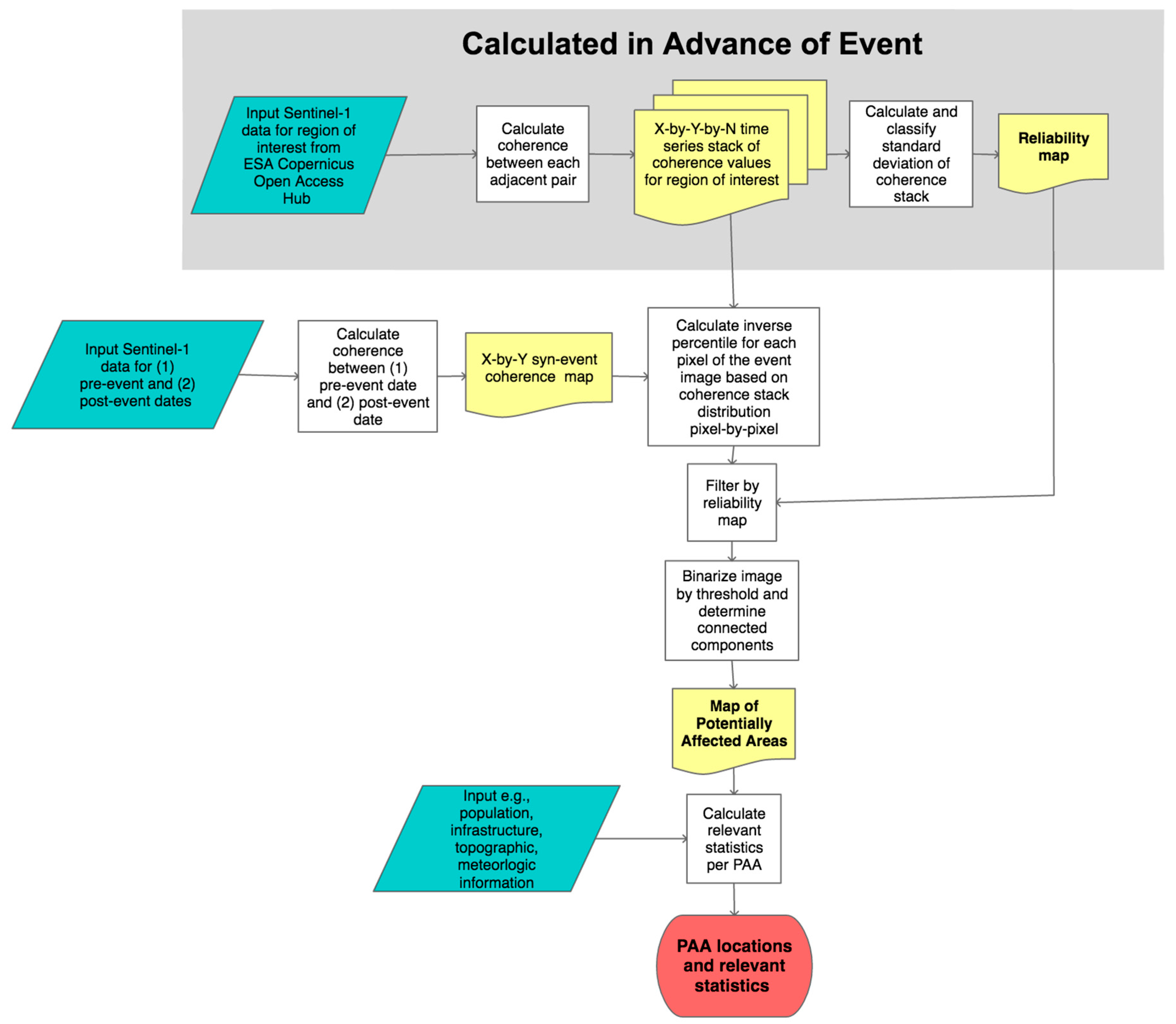
In order to identify Potentially Affected Areas (PAAs) related to a natural hazard event, we construct a simple algorithm using a time series of coherence data, summarised in
Figure 1. SAR images for at minimum one year were obtained from the ESA Copernicus Open Access Hub [
22] and coherence was calculated using ISCE following the parameters outlined in
Section 2.1 above. The coherence values were then amalgamated into a spatially referenced
x-by
-y-by
-n stack, where the spatial dimension is given by
x and
y and the temporal component by
n. This temporal coherence stack is then the basis from which we characterise pixel-by-pixel reliability, as described below, and coherence distributions through time.
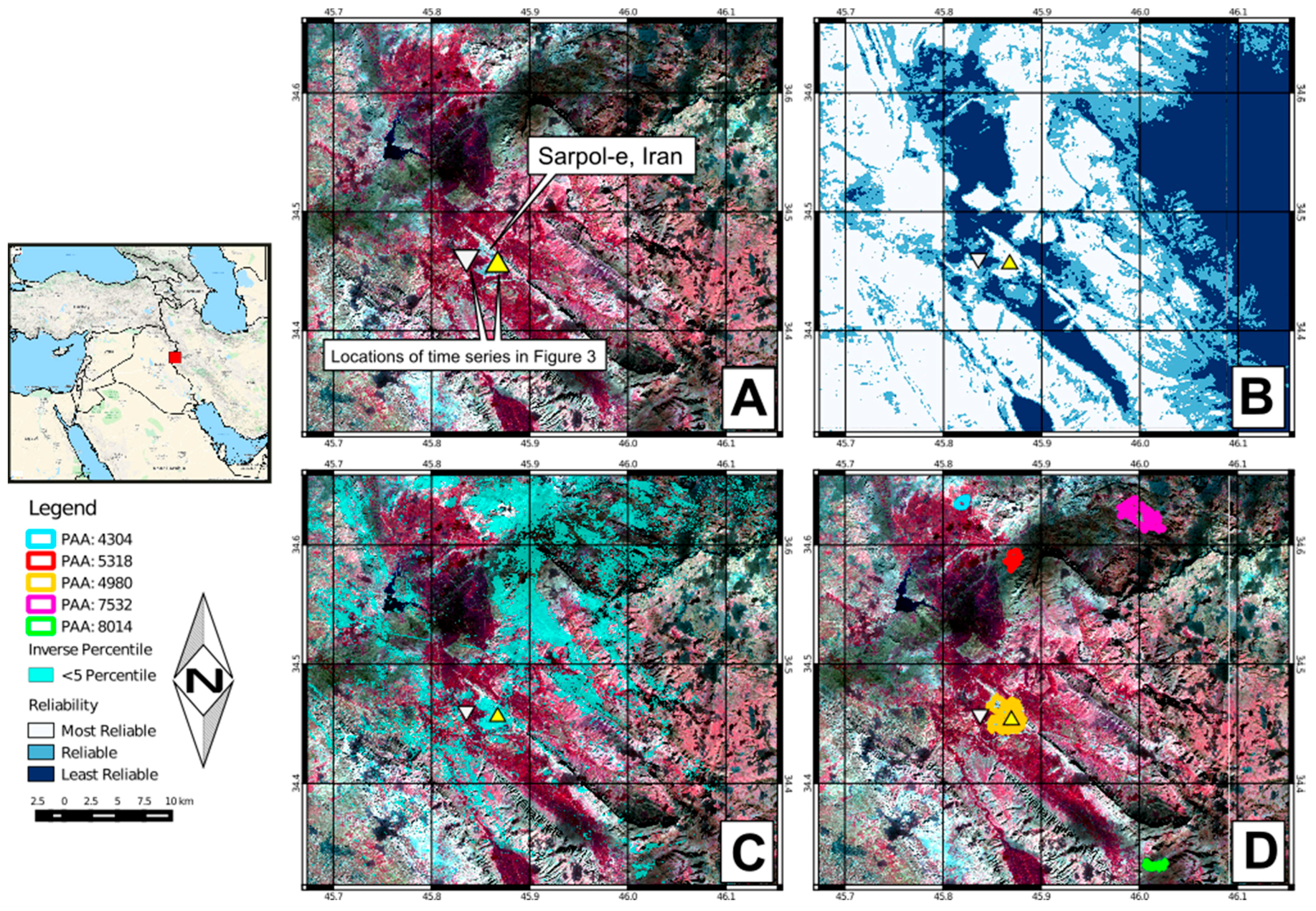
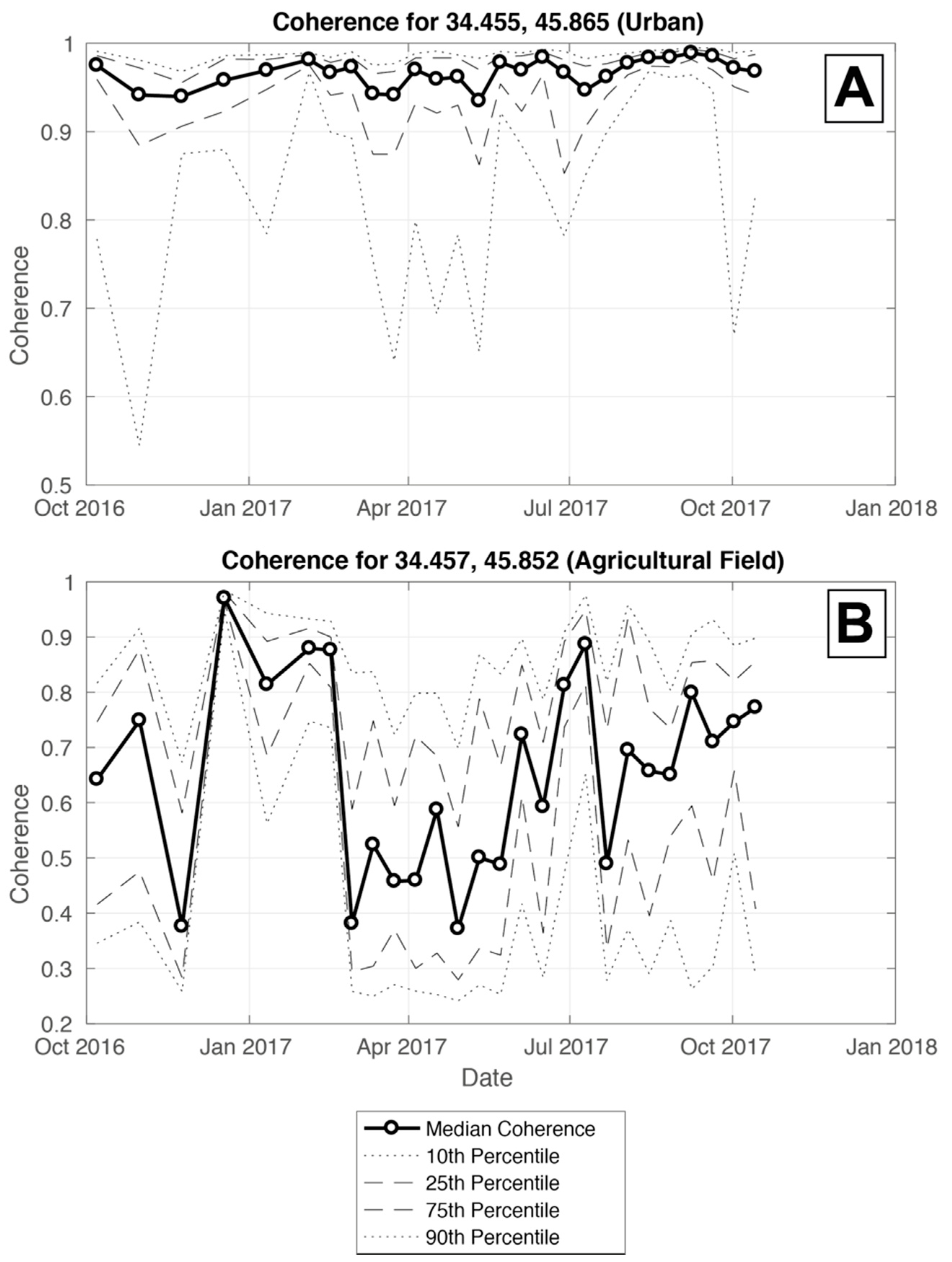
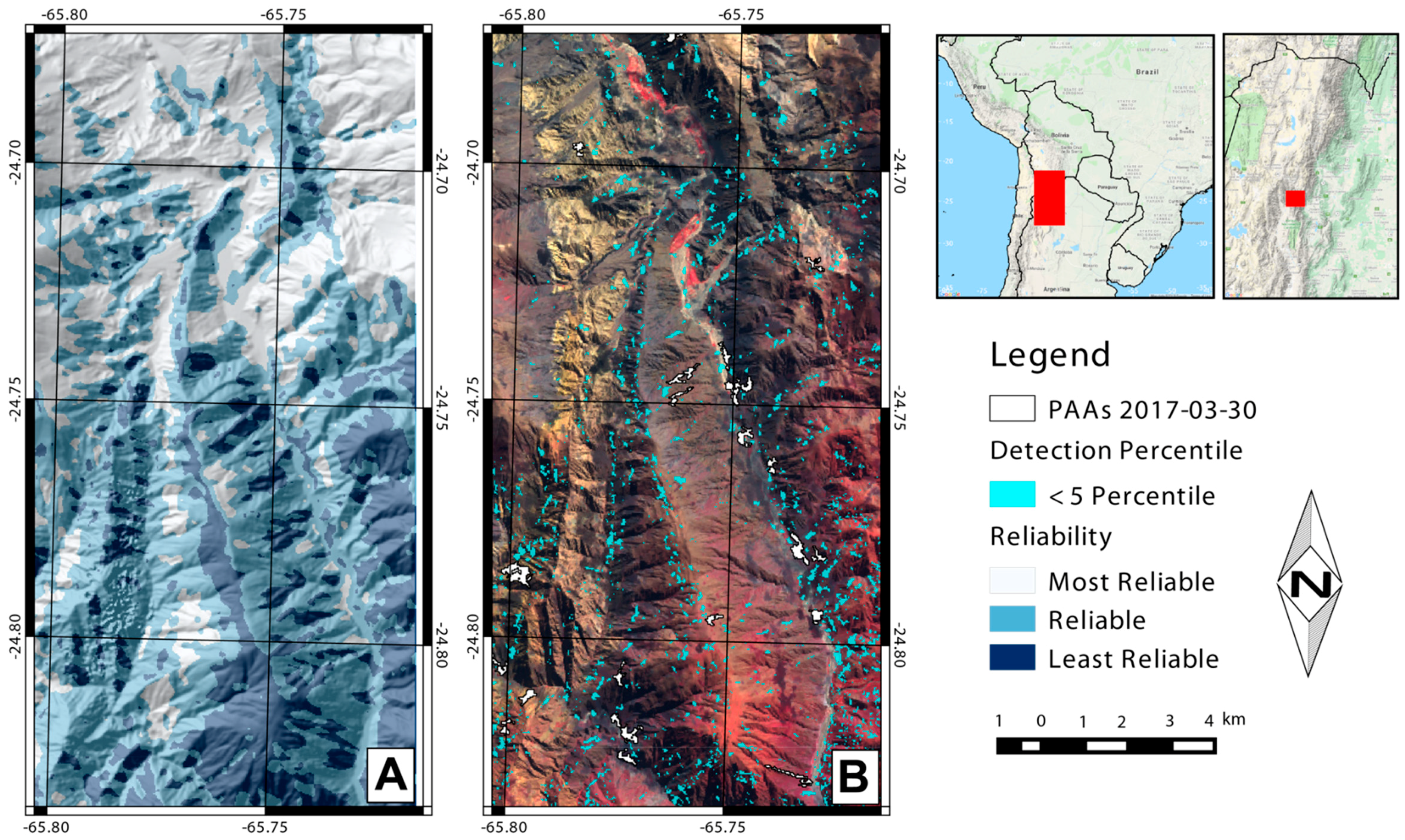
We generate a map of signal reliability derived from the standard deviation of coherence for each pixel to account for natural, non-event related coherence variability through time. In other words, a pixel that experiences considerable scatter throughout the course of a year, such as a forest or an agricultural field, will be considered less reliable when interpreting potentially affected areas than a pixel with little deviation through time, such as an urban structure. The reliability estimate is classified into three different categories: “least reliable”; “reliable”; and “most reliable”. For our case studies, we defined “most reliable” as having a standard deviation less than 0.1 (i.e., more than a ~68% of the time series varies less than a value of 0.1 as compared to a mean value), “reliable” as a standard deviation of 0.1–0.3, and “unreliable” as pixels with a standard deviation greater than 0.3. Reliability maps can also be optionally filtered to reduce noise and smooth patterns, though we did not perform this step in our case study analysis. Once produced, the reliability maps provide a basis for rapid interpretation of where coherence loss is most likely to be associated with damage from a natural hazard as opposed to natural variability.
The coherence for a single pixel is characterised over the time series in one of two ways: (1) using the entire data stack, including all times of year; or (2) using seasonally filtered stacks, depending on the timing of the event and the region of interest. If wet-dry seasonal cycles cause significant coherence variations in a time series, filtered coherence stacks, where only pre-event coherence from the wet or dry season is used, may be more appropriate for estimating PAAs (see
Section 4.3 below). Ideally, the stack should not include dates containing known events of the type that the user wishes to detect. After the coherence stack is generated, potentially affected areas (PAAs) are identified by comparing syn-event coherence from a known or possible natural hazard event to the distribution of pre-event coherence values from the coherence data stack. To characterise where coherence values are abnormally low in the syn-event coherence image, each pixel of the syn-event image is compared to the temporal distribution (either annual or seasonal) of coherence values for that pixel and the inverse percentile of the syn-event coherence is calculated and assigned. The resulting map gives the percentile for each pixel compared to the distribution of past coherence values (e.g., 1st, 10th, 70th percentile). Regions that are below a user-defined critical threshold (e.g., 5th percentile) are considered potentially affected areas.
The inverse percentile map is binarised using a critical threshold value (e.g., 1st, 5th, 10th percentile) to determine PAAs. In regions with large areas of natural variability of coherence values (e.g., agricultural fields, forests), the reliability map can be used to filter the PAA estimation. The binary image is then amalgamated into connected components, providing a single numerical designation to each contiguous PAA region. Depending on the application, regions with few connected components can be filtered out. Using the map of PAA numerical identifications, PAAs can now be characterised in terms of user-specified properties, such as size, topography, population, and infrastructure statistics, and ranked accordingly. The method can also be used as a form of possible event detection and assessment in remote areas with minimal land-based monitoring infrastructure, by creating a background stack and reliability map, then feeding new SAR images as potential events to see if PAAs are detected.
4. Discussion
4.1. Advancements and Improvements Using Time Series of Coherence Data
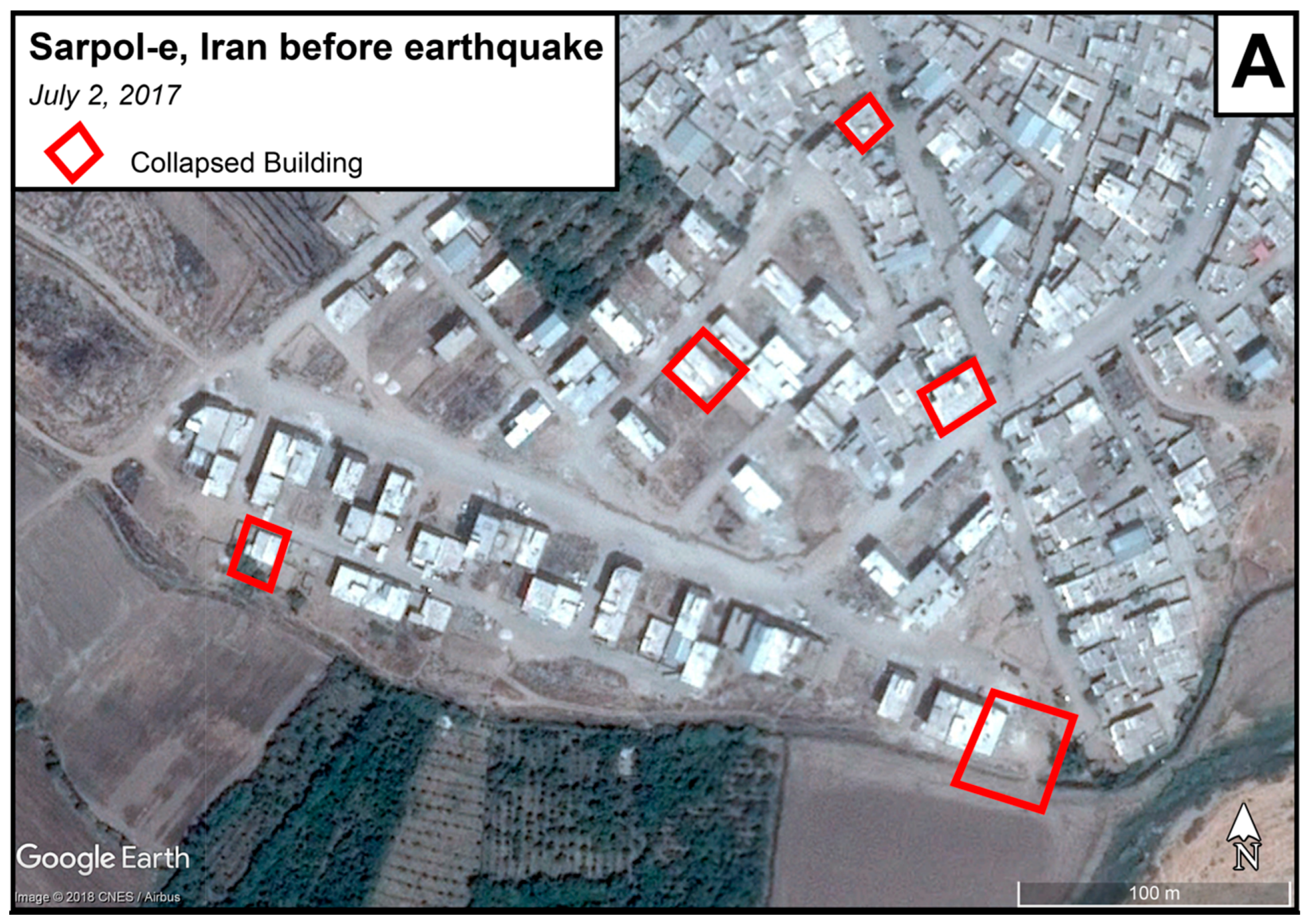
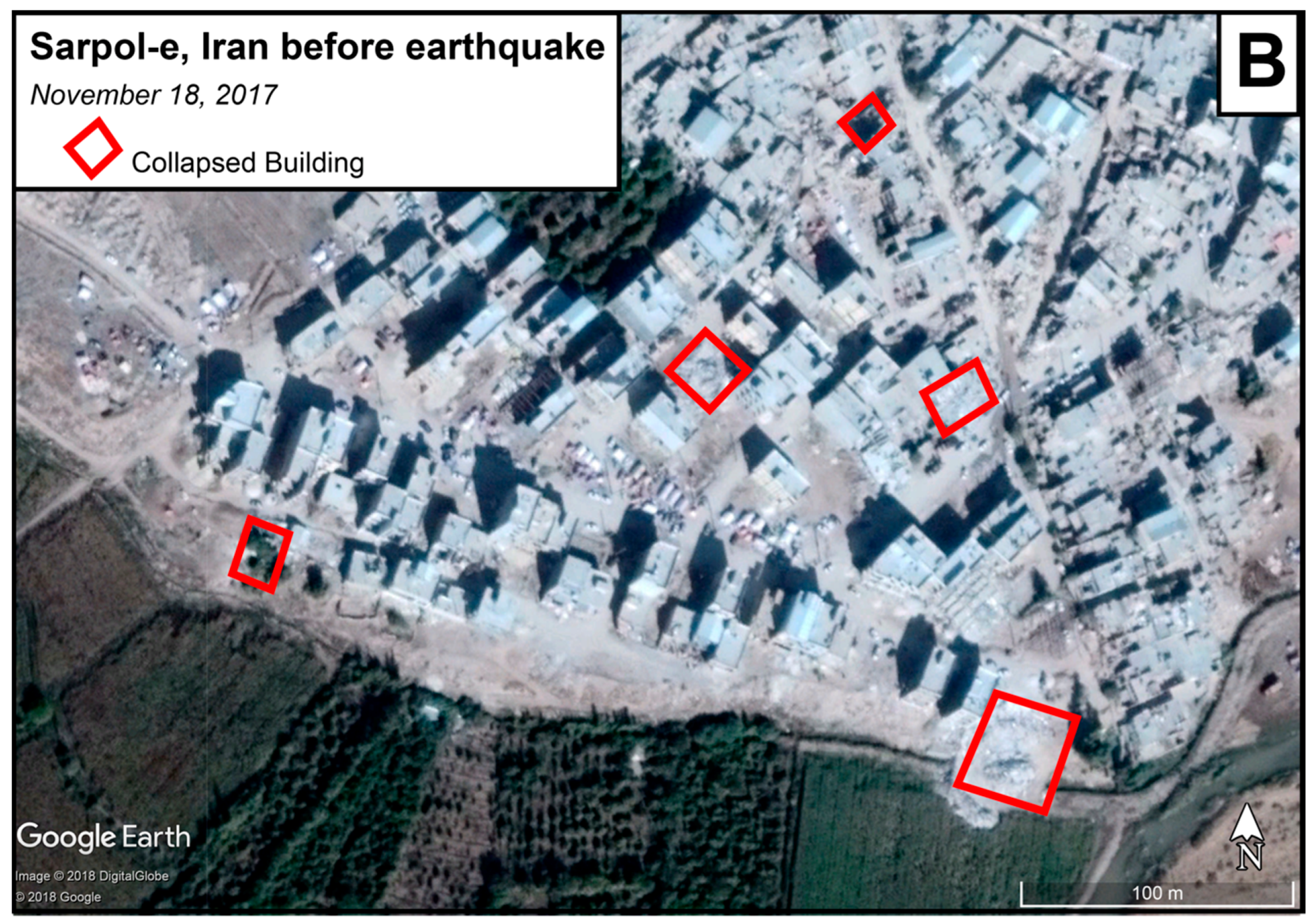
Weather- and daylight-independent, with near-global coverage and free accessibility, Sentinel-1 SAR data allows users to create robust databases of SAR values in regions of interest for natural hazard event detection and response. Using case studies from the region of Sarpol-e, Iran following the Mw 7.3 earthquake on 12 November 2017 and a major infrastructural hub for mineral resources in northwestern Argentina, we demonstrate how such databases can provide valuable insights into detecting potentially affected areas following natural hazard events.
The most important advancement of this method is the ability to create a pixel-by-pixel time series of coherence values over seasonal and meteorological cycles for a given region of interest. Variability of SAR coherence occurs due to natural cycles, such as wet-dry seasonal regional climatic patterns, but also due to anthropogenic causes, such as ploughing and growing seasons in agricultural areas. By constructing time series of each pixel’s coherence over these cycles, we determine where coherence loss is likely to be meaningful via the construction of reliability maps. These maps serve to guide user interpretation of detected PAAs. Constructing pixel-by-pixel time series of coherence allows the user to determine what magnitude of coherence loss is necessary for a given pixel in the region. For example, for a syn-event coherence value to fall below the, e.g., first percentile threshold for PAA detection, a lower coherence value will be required in regions with more inherent noise (e.g., a field or forest) than regions with less inherent noise (e.g., urban areas). This provides the user considerably more insight than a simple calculation of the coherence loss between syn-event coherence and a single pre-event coherence calculation. It also removes the need to alter the coherence data by means such as histogram matching to compare individual coherence estimates. The variability of coherence caused by atmospheric and other effects will be incorporated into the time series.
In regions where seasonal differences are important, the coherence stack can be filtered by season and the event compared directly to the range of coherence values in the appropriate season. Filtering the coherence values by season is particularly useful in regions with marked differences, e.g., rainy and dry seasons, or agricultural growing seasons. For example, meaningful coherence loss in the non-growing season may be encompassed by the inherent noisiness of the data if the growing season is included. To this end, a greater degree of coherence loss will be required during the growing season or the wet season than during times when coherence is more stable (e.g., dry season, outside of the growing season). This reduces the amount of noise during seasons with lower or more variable coherence, and ensures that event-related coherence loss during stable or high-coherence times is not missed because of a lower threshold when using the entire years’ coherence data. These subtler analyses of the syn-event coherence change are only possible by exploiting time series of pre-event coherence and cannot be gleaned from a single pre-event coherence estimate.
Multitemporal InSAR processing has been employed with high accuracy in other studies. For example, the use of persistent scatterers to track surface deformation and associated damage in urban environments, e.g., [
34]. While a multitemporal InSAR approach using methods such as persistent scatterers provides insightful and accurate results, it requires that data collection and processing be performed after the event has occurred. This makes it poorly suited to rapid damage assessment. Pre-event coherence stacks and reliability maps in our proposed method can be calculated and maintained for a region of interest before a natural hazard event has occurred, meaning that the syn-event coherence is the only interferometric processing that needs to be performed after an event. Furthermore, coherence is a relatively simple calculation (compared to multitemporal interferometric processing with phase unwrapping or persistent scatterers analysis) that can be performed on a suite of different software platforms. Therefore, while our method does not provide the quantitative estimates of damage, it is a tool that can be rapidly generated following an event to aid user interpretation of potential damages.
4.2. Challenges of Mapping Potentially Affected Areas with Radar
Though the described processes offer a powerful and robust method to estimate regions potentially affected by natural hazard events, there are nonetheless inherent limitations to the method and the use of C-band radar. Most prominent of these is the applicability of C-band radar to highly vegetated regions. Because the wavelength of the C-band radar signal interacts with the vegetation canopy, e.g., [
35,
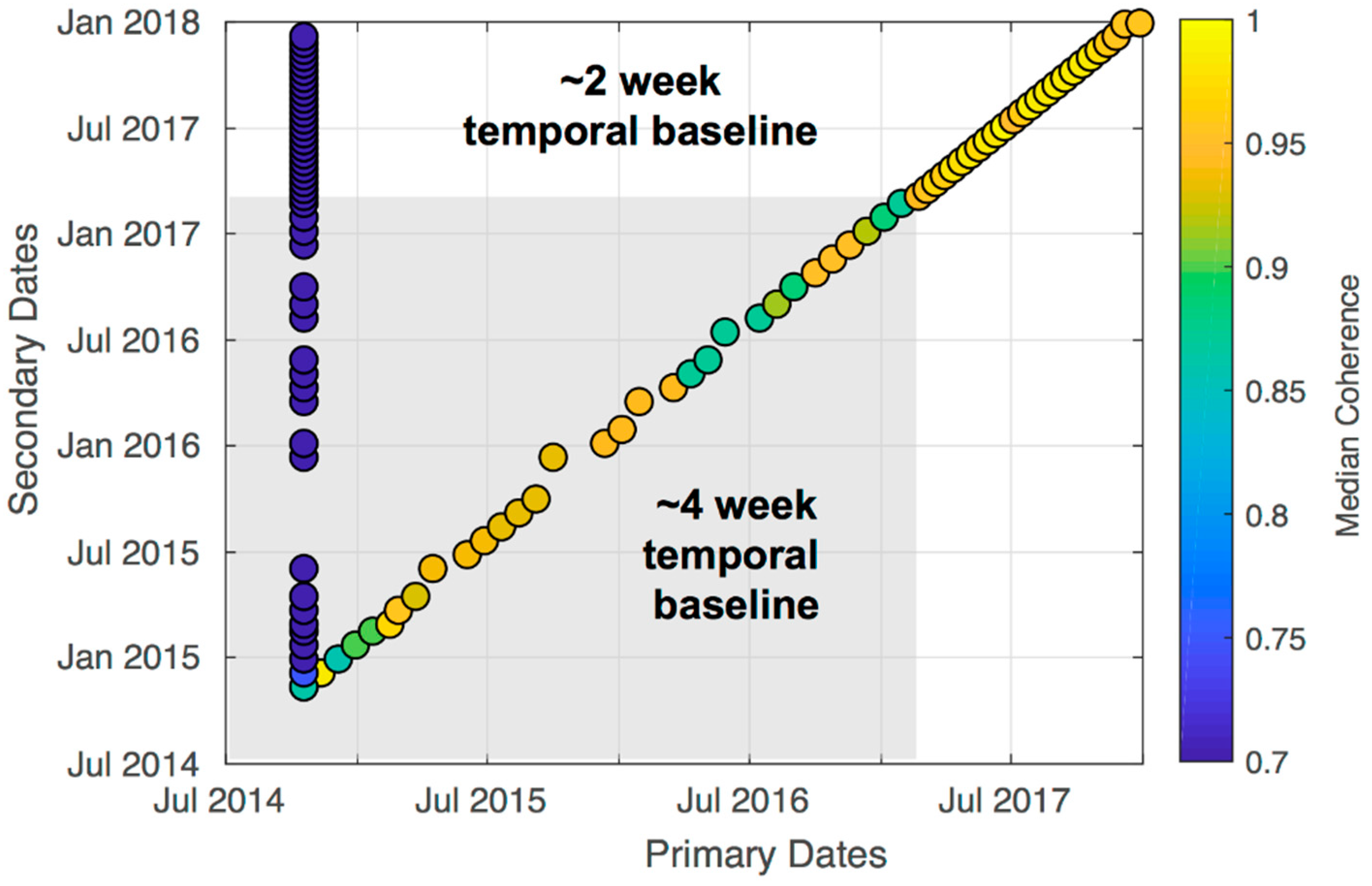
36], the coherence values of these regions may be too inherently noisy for meaningful assessment of affected areas using this method. To test the applicability of the method to densely vegetated regions, we used one year of SAR images of Freetown, Sierra Leone leading up to the large mudslides that devastated the densely populated city on 14 August 2017. No discernible patterns associated with the mudflow were detected in the event coherence image using this method. However, the launch of the Sentinel-1B satellite has increased the repeat time to 6–12 days, resulting in higher and more consistent coherence estimates between images with low temporal baseline (
Figure 8). Thus, as more data are collected and the databases become increasingly robust to allow for better estimates of natural coherence variability, this problem may be constrained in the future.
In addition to vegetation, soil moisture or standing water directly impacts the coherence of two SAR images [
37,
38,
39]. This may prove beneficial in the case of flood extent mapping [
40], for example, but could result in extensive regions being flagged as potentially affected areas that have not experienced a triggering natural hazard event. This is of greater concern when the method is employed to detect potential events in remote regions, such as in our case study in the Quebrada del Toro.
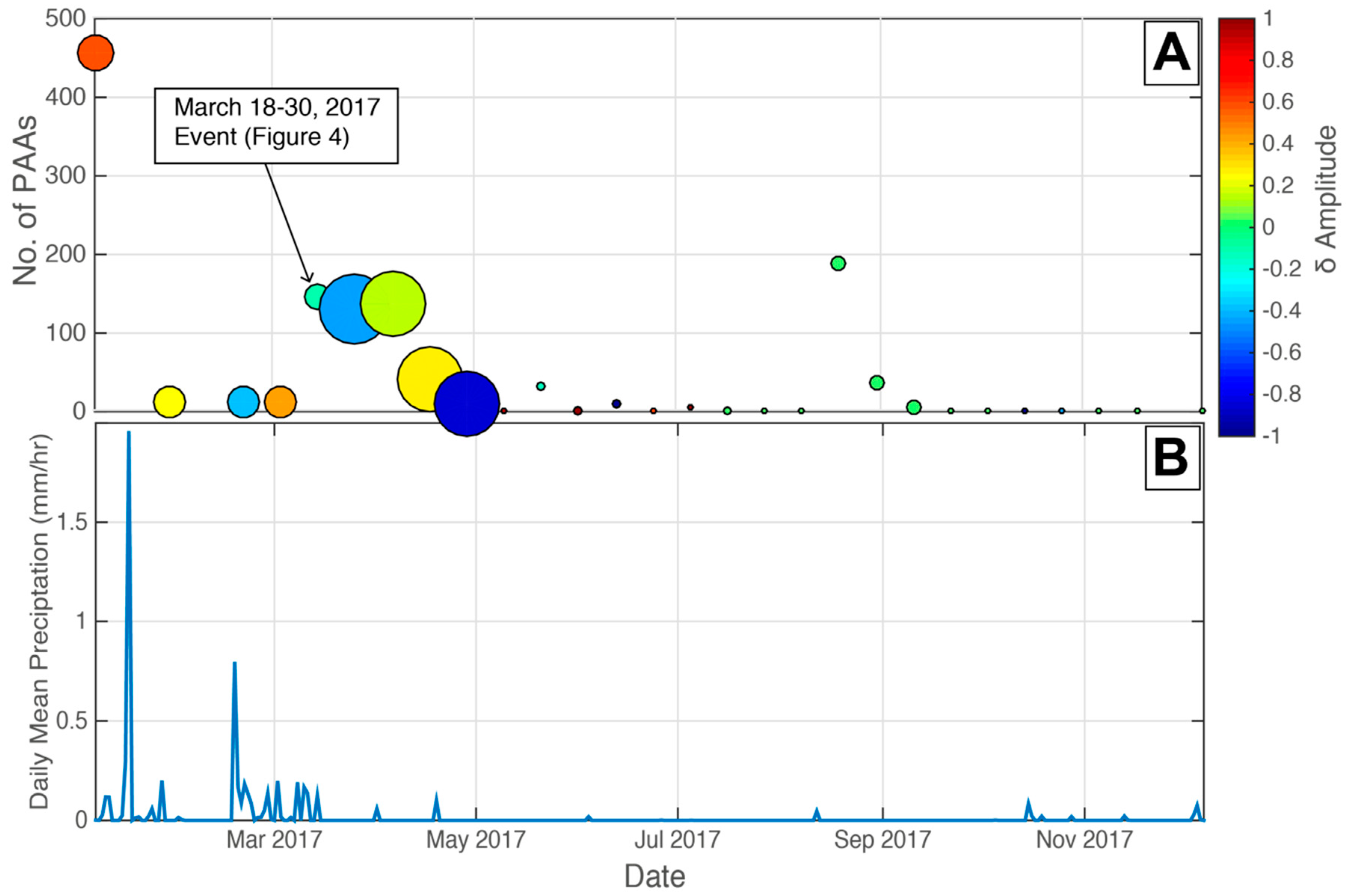
Figure 6 shows the number of PAAs detected in each coherence image and the size of the largest detected PAA compared to two indicators of potential soil moisture or standing water. The Global Precipitation Mission (GPM) precipitation records half-hour estimations of precipitation, but cannot always be directly linked to soil moisture. Therefore, we also use the change in Sentinel-1 amplitude (δAmplitude) between adjoining pairs as an additional proxy for soil moisture change. Though a limited number of independent soil moisture estimates exist (e.g., SMAP, CCI), they have proven unreliable in ground tests [
41,
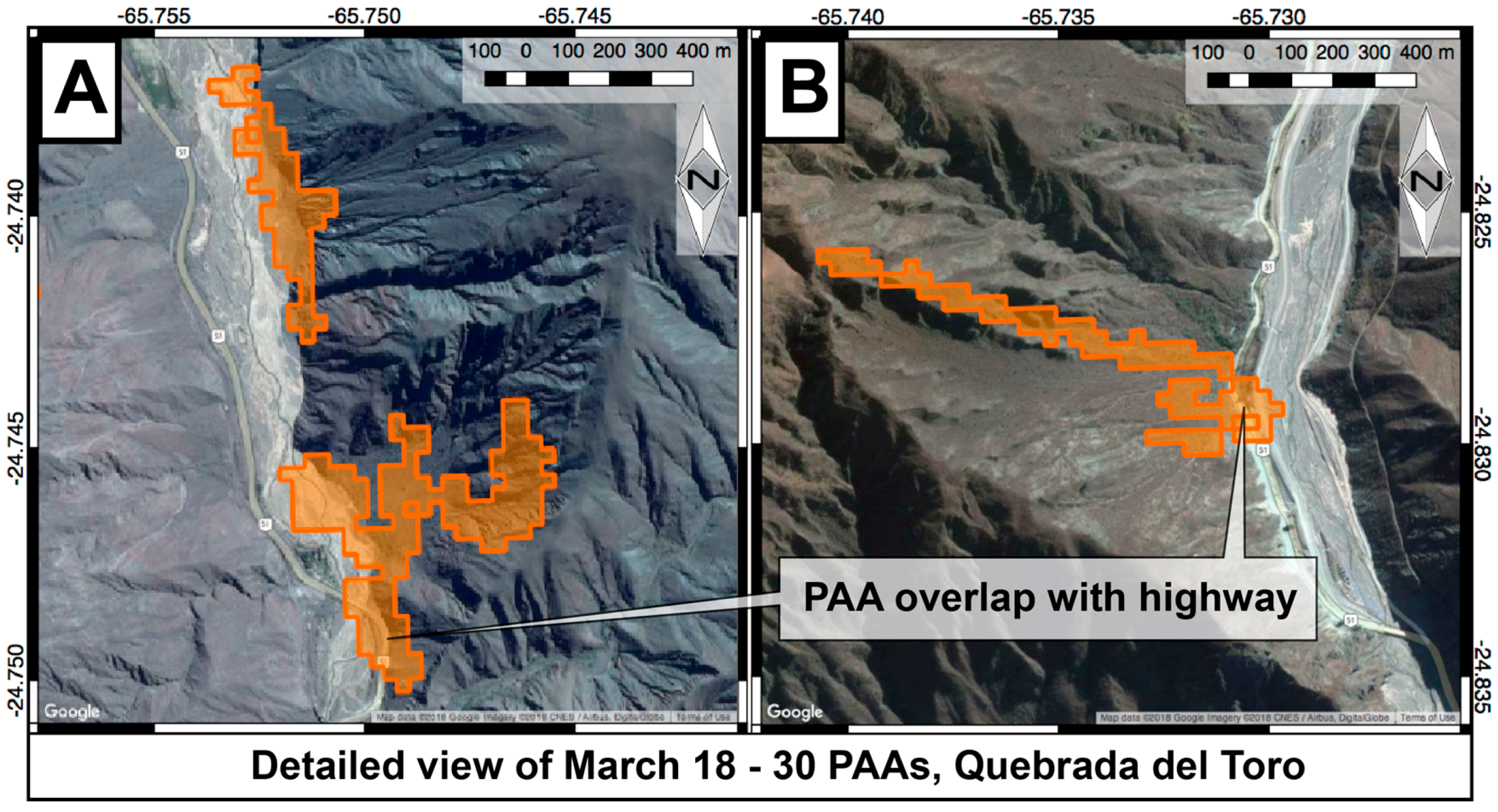
42]. Because the presence of soil moisture, and particularly standing water, will result in a decrease in received radar amplitude, a negative change in amplitude (δAmplitude) between adjacent images may indicate an increase in soil moisture. Comparing these three time series, we observe that the largest and most extensive occurrences of PAAs in this region are associated with time intervals where changes soil moisture are likely to be impacting large areas of the scene. We observe order-of-magnitude larger contiguous PAA area in time intervals with negative δAmplitude compared to, e.g., during the March 2017 example highlighted in
Section 3.2. While this does not provide a quantitative estimate of soil moisture, incorporating additional data constraints, such as GPM and soil moisture proxies, can aid in the interpretation of large and extensive PAAs to determine if a detected event is likely to be hazardous or resulting from soil moisture change.
4.3. Length and Temporal Spacing of Coherence Database
There are two main considerations when determining how large the database of coherence values should be for a given region of interest. Though larger databases will result in more robust estimates, due to storage and computing capacity issues, users may want to use the minimum database size reasonable. Therefore, users should consider: (1) how coherent a region is likely to be; and (2) are there important seasonal cycles in the region of interest? For example, in the case study in Sarpol-e, Iran, we expect generally high coherence values due to the arid nature of the region. A temperate region will require a longer time series to get accurate estimates of coherence variability. However, even in regions that are semi-arid, seasonal cycles may cause large variation in coherence values between dry and wet seasons. If the region requires separate seasonal coherence databases, a longer time series will be desirable to ensure that each seasonal database remains robust.
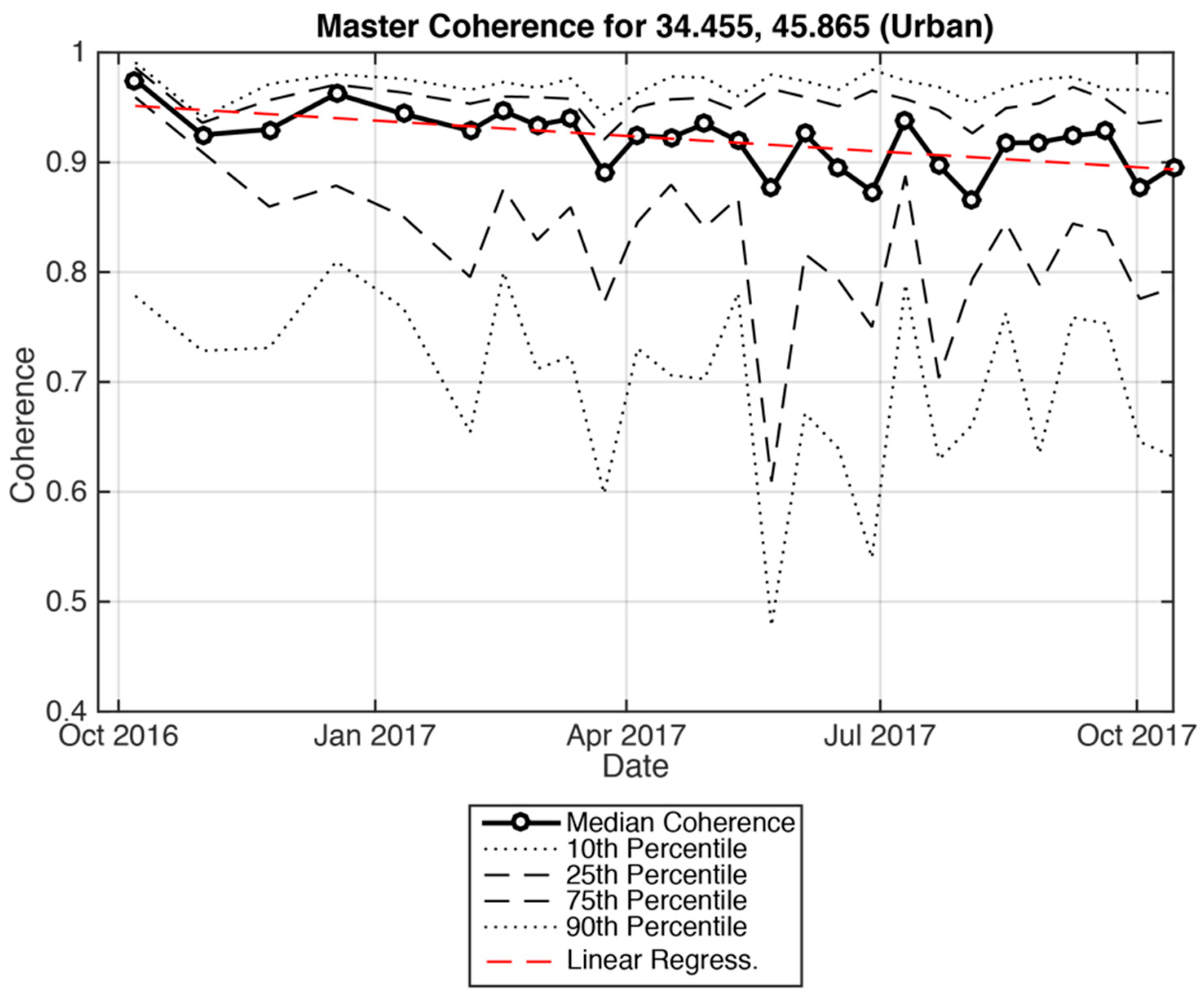
Another consideration is the temporal spacing of SAR scenes in the database. After the launch of Sentinel-1B (April 2016), the recurrence interval of SAR data collection of a region has regularised. However, users who desire longer time series may encounter the problem that the recurrence interval was longer during the period where only Sentinel-1A is available. A natural deterioration of coherence occurs with increasing temporal baseline between SAR images, even for regions that are coherent.
Figure 9 shows the decrease in coherence for a coherent urban region of Sarpol-e, Iran. Though a gradual decrease in coherence (~0.0014/week, R = −0.608) is observed with time, approximately six months are required before the coherence drops below 0.9. We therefore infer that the inherent coherence loss between two- and four-week temporal baselines should be minimal. In the case that the inherent decrease in coherence is high, a simple normalisation of values in the pre-event coherence stack by temporal baseline can be implemented. However, when possible, it is always desirable to use as consistent of temporal baseline as possible.
5. Conclusions
The open accessibility, near-global coverage, and high repeat time of Sentinel-1 C-band radar allows for new advances in monitoring natural hazards on the Earth’s surface. By constructing a database of SAR coherence values for regions of interest, where seismic or climatically triggered natural hazards are likely to occur, we can now determine where coherence loss is meaningful, and what magnitude of coherence loss related to an event is necessary to determine potentially affected areas. Though the construction of a large coherence database may be computationally expensive and time-consuming, this step can be done pre-emptively for regions of interest and maintained as new data becomes available. The temporal database of coherence values can then be rapidly employed to estimate damage following a natural hazard event. By using a time series of coherence values to characterise the pre-event coherence, we account for the natural variability of coherence inherent to different land covers across a region of interest. Furthermore, the method can be used not only for rapid response following known events (e.g., earthquakes, heavy precipitation), but as a detection tool in remote regions where events may go undetected by traditional monitoring means. Though we focus our study on C-band radar provided by ESA’s Sentinel-1 mission, due to its high accessibility, we point out that it could also improve potential damage mapping using other radar bands provided a long enough time series is acquired. This is particularly true for X-band radar systems such as COSMO-SkyMed or TerraSAR-X, where different acquisition modes have a much higher spatial resolution, but are also highly sensitive to surficial changes.
The estimation of potentially affected areas following this method, combined with pertinent local data (e.g., population, infrastructure) creates a valuable tool for identifying and interpreting regions that may be damaged following a natural hazard event. By understanding, quantifying, and mapping the natural variability of coherence in a region of interest, both scientists and response teams will be able to more effectively respond to the growing number of natural hazards posed by our increasingly changing and volatile global system.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}