1. Introduction
The rapid pace of urbanization in the twenty-first century has significantly strained existing infrastructure and public services, creating new challenges that demand sustainable, technology-driven solutions. Among these pressing urban concerns, parking management has emerged as a critical issue directly affecting traffic congestion, environmental responsibility, and overall urban well-being. As private vehicle ownership continues to rise globally, the supply of parking in crowded city environments has not kept pace, resulting in longer search durations, greater fuel usage, and elevated levels of pollution [
1].
According to Bassil [
2], drivers in large metropolitan areas lose approximately 17 h each year looking for parking, leading to substantial losses in productivity and fuel. Conventional parking approaches, typically characterized by fixed pricing and rigid space allocation, are unable to respond dynamically to shifting supply–demand conditions, resulting in the poor utilization of available spots and increased driver dissatisfaction [
3,
4]. Furthermore, the constant circulation of vehicles around crowded parking zones intensifies city traffic and raises emission levels [
5,
6].
In this context, embedding Internet of Things (IoT) technologies into urban parking infrastructure offers a compelling pathway for sustainable modernization. Smart parking platforms, featuring real-time tracking, dynamic guidance, and predictive analytics, can increase operational efficiency, lower carbon emissions, and enhance the user experience. Through the use of sensor arrays, forecasting algorithms, and agent-based modeling, such systems enable flexible allocation and dynamic pricing, aligning with global efforts to build more resilient, inclusive, and sustainable urban transport systems [
7,
8,
9]. However, despite these advancements, existing IoT-driven parking systems still face significant technical and operational limitations. These include data latency, network interoperability issues, sensor inaccuracy, and scalability constraints in high-density environments. Moreover, real-world deployments are often hindered by privacy concerns, high infrastructure costs, and lack of integration with broader mobility services. Many current models also neglect adaptive decision-making mechanisms and rely heavily on centralized control, which can limit flexibility under dynamic urban conditions. These gaps highlight a critical need for intelligent, decentralized solutions that are not only technically robust but also economically and environmentally sustainable. This study addresses these challenges by proposing a multiagent-based simulation framework that models decentralized coordination, real-time data use, and predictive guidance to optimize parking management in smart cities.
The notion of smart cities, which utilize cutting-edge digital technologies to improve the performance, sustainability, and accessibility of municipal services has gained traction as an effective strategy for addressing various urban issues, such as traffic congestion and transportation inefficiencies [
10,
11,
12]. Among these digital innovations, IoT serves as a key enabler by supporting real-time data acquisition, seamless connectivity, and context-aware decision-making within city infrastructure. The Internet of Things encompasses interconnected physical objects equipped with sensors, software, and communication capabilities that enable them to gather and transmit data online to facilitate automation and enhance service efficiency.
In the realm of urban transportation, the IoT has emerged as a key enabler for intelligent parking systems, facilitating continuous occupancy tracking, flexible space assignment, and enhanced traffic regulation within densely populated areas [
13,
14,
15]. A standard IoT-enabled parking infrastructure integrates detection devices installed at or near parking bays to sense vehicle presence. These devices, including magnetic, infrared, and ultrasonic sensors, reliably identify space occupancy status and relay this information to a centralized management system. Magnetic sensors are commonly adopted due to their energy efficiency and strong detection capabilities in outdoor settings, whereas ultrasonic sensors are particularly effective for monitoring vehicle presence in structured or enclosed parking facilities [
16,
17,
18].
Collected data are processed through edge or cloud-based systems to dynamically direct drivers toward vacant parking spaces using smartphone applications or roadside digital displays [
19,
20]. This approach not only minimizes the duration drivers spend looking for parking but also helps to ease traffic buildup and pollution from stationary vehicles with running engines [
21,
22]. Furthermore, these systems can leverage machine learning to generate predictive insights, supporting data-driven policies for demand forecasting and sustainable pricing models [
23,
24].
For communication, various network technologies including Wi-Fi, cellular (4G/5G), and long-range IoT protocols such as LoRaWAN or NB-IoT are employed, ensuring consistent connectivity and low-latency updates [
25,
26,
27]. These technologies allow consistent data flow between users, infrastructure, and urban planners, fostering greater transparency, responsiveness, and sustainable service delivery. By streamlining the interaction between users, infrastructure, and city operators, IoT-based parking systems contribute significantly to operational efficiency, environmental sustainability, and improved urban livability [
25,
27].
This study posits that integrating IoT technologies into urban mobility systems can play a transformative role in improving the functionality, inclusivity, and long-term viability of city infrastructure [
28,
29]. Drawing upon prior research and translating key findings into a simulation framework grounded in multiagent design, this study investigates the deployment and potential benefits of smart parking systems. Beyond its technical components, this paper also considers the wider societal, financial, and ecological impacts of IoT-integrated parking management in urban environments. As part of this effort, a simulation model is constructed to evaluate the performance of an intelligent parking ecosystem powered by real-time sensor data, predictive navigation, and adaptive space management.
The framework models a scenario in which sensor-equipped parking spaces identify vehicle occupancy and relay this information to a centralized management system [
30,
31]. This information is then analyzed to generate navigation instructions for drivers, dynamically assigning parking locations according to proximity, current availability, and projected usage trends. A predictive guidance module computes optimal routes and forecasts spot availability using both real-time inputs and historical usage data [
30,
32,
33].
The simulation compares the proposed IoT-based dynamic parking system with the traditional static, first-come-first-served approach. In conventional systems, drivers often search aimlessly for available spots, resulting in unnecessary delays, increased roadway congestion, and elevated pollution levels [
31,
34]. In contrast, the smart model minimizes search time, optimizes resource utilization, and supports sustainable mobility objectives.
To evaluate system performance, the model is calibrated using empirical data collected from sensors, simulating diverse traffic patterns and parking demand conditions. The analysis considers key performance indicators including operational efficiency, environmental benefits, user satisfaction, and time savings for drivers. A sensitivity analysis further explores critical questions such as the following: How many parking spaces are utilized under varying demand levels? What is the average search time per vehicle across scenarios? How far do drivers travel before parking? And how do these outcomes differ between the smart system and traditional methods?
The simulation is implemented using the Janus multiagent framework [
35,
36], which supports organization-based modeling and facilitates flexible urban mobility simulations. Overall, this study provides practical insights for achieving sustainable urban development goals through the lens of intelligent parking infrastructure.
The structure of this paper is as follows.
Section 2 provides an overview of existing studies focused on agent-based approaches and IoT-enabled methodologies for managing smart parking systems.
Section 3 introduces the developed simulation model, describing its core components, agent functionalities, and interaction dynamics.
Section 4 discusses the implementation of the case study and analyzes key outcomes that demonstrate the model’s performance across multiple evaluation criteria.
Section 5 summarizes the findings and outlines potential directions for future research and system improvements.
2. Literature Review
Recent research has increasingly focused on leveraging the IoT and intelligent systems to tackle issues related to urban mobility, with a specific emphasis on parking management. Traditional parking systems are typically static and do not respond to real-time variations in demand, resulting in inefficient space utilization, congestion, and driver dissatisfaction. Consequently, studies have explored smart parking frameworks using IoT technologies, data-driven optimization algorithms, and multiagent simulations to enhance system responsiveness, reduce environmental impact, and improve user experience. The subsequent sections summarize prior studies related to agent-based modeling and IoT-based parking solutions.
2.1. Agent-Based Simulation for Smart Parking Systems
Agent-based simulation has emerged as a robust method for representing and evaluating intricate urban mobility systems like smart parking, where heterogeneous agents including vehicles, drivers, parking infrastructure, and system controllers interact within continuously evolving urban scenarios. Santos [
37] introduced an agent-based, real-time guidance platform that routed vehicles to nearby vacant spots using occupancy and distance data, leading to notable decreases in traffic congestion and time spent searching for parking. Likewise, Abd Kadir et al. [
38] designed a decentralized multiagent architecture for on-the-fly parking space booking, assigning agents to vehicles engaged in negotiating available slots. Their experiments indicated enhanced system performance and shorter search durations.
In a more contemporary investigation, Musa et al. [
9] implemented a digital twin simulation in conjunction with IoT sensor networks to examine the balance between service efficiency and operational expenses within smart parking infrastructures. Their approach merged sensor integration and simulated scenarios to offer policymakers valuable insights for strategic parking regulation. In the study by Farooque et al. [
39], an intelligent parking framework was introduced that utilized multiagent coordination alongside historical traffic data. The model adaptively reassigned parking slots in response to demand surges and factored in sustainability indicators, including emission minimization.
Multiagent simulations have also been utilized for scenario analysis and system sensitivity testing. For instance, Jusat et al. [
40] presented a smart city simulation where agent-based models were used to analyze how different levels of parking availability affect driver behavior, route selection, and urban congestion. Their model allowed for testing various policies including dynamic pricing, reservation incentives, and time-based restrictions.
Moreover, platforms like Janus and NetLogo have been employed to implement organization-based and behavior-driven parking simulations. Jung [
41] developed an agent-based model using Janus to simulate parking behavior under constrained supply conditions in urban centers. Their approach incorporated real-time data feeds, simulated sensor inputs, and behavioral rules to assess policy impacts across different user groups. By incorporating predictive elements and decentralized decision-making, such simulations allow for a more nuanced analysis of smart parking strategies and their scalability. While platforms such as Janus have demonstrated their effectiveness in academic environments, few studies have applied them to holistically simulate predictive routing, sensor-driven occupancy detection, and driver–system interactions simultaneously, as this study aims to do.
2.2. Smart Parking Mechanisms and Sustainable Optimization Strategies
Recent advancements in smart mobility have emphasized the importance of sustainable parking solutions, particularly within the framework of IoT-enabled infrastructure. A central challenge in urban parking management is the real-time uncertainty of space availability, which smart systems attempt to mitigate through the integration of sensor technologies, such as magnetic, ultrasonic, and infrared detectors, capable of transmitting occupancy status to centralized platforms for decision support and dynamic routing.
Alam et al. [
42] showcased how real-time sensor data, coupled with optimization logic, can significantly reduce the fuel consumption and emissions associated with parking searches, thereby enhancing both environmental and operational sustainability. Similarly, Priyadarshini [
43] developed a software solution for dynamic parking route planning based on historical and forecast occupancy data. Their platform aimed to optimize parking slot assignments to reduce traffic congestion and improve user satisfaction.
Sadhukhan et al. [
44] evaluated both static and demand-responsive allocation strategies using mixed-integer programming and demonstrated that flexible pricing and dynamic slot assignments enhanced parking space utilization and resource fairness. Hashem et al. [
45] introduced two intelligent parking models, one based on real-time traceability using IoT sensors, and another integrating vehicle classification and zone-based pricing for enhanced regulation and policy control.
In the context of sustainable urban mobility, Tran et al. [
46] developed an advanced nonlinear mixed-integer optimization approach aimed at improving the efficiency of parking infrastructure in zones with variable demand. Their research prioritized minimizing urban sprawl by enhancing slot utilization rates and supporting location-aware parking allocation. Santos et al. [
37] employed optimization techniques to address diverse residential parking requirements by dynamically adjusting slot availability using live occupancy inputs and forecast-based usage modeling.
Husnoo et al. [
47] integrated cloud analytics with IoT-based parking systems, highlighting significant gains in emission reduction, accessibility, and operational cost-efficiency. Their work supports the Sustainable Development Goals (SDGs), particularly those linked to urban innovation and responsible consumption.
Kanakaraja et al. [
48] proposed a stochastic optimization model using chance-constrained programming to minimize travel distance and maximize user experience, accounting for uncertain parking demand. Similarly, Pradhan et al. [
49] designed an intelligent parking reservation and guidance system using a hybrid metaheuristic combining genetic algorithms and whale optimization. Their model optimized parking assignments while reducing average search time across the network.
Wang [
50] identified optimal routes for drivers in Bilaspur, India, by integrating GIS and occupancy data to create efficient travel paths. Annirudh et al. [
51] enhanced this approach by proposing a penalty system for exceeding time limits on full parking spaces, thereby encouraging fast turnover and more effective space reuse. Their solution integrated real-time alerts, centralized dashboards, and smart parking allocation.
Venkata et al. [
52] applied multi-objective optimization techniques to balance travel time, route efficiency, and occupancy rates. Their model used greedy and variable neighborhood search heuristics to approximate Pareto-efficient solutions. Raman et al. [
53] extended this research with a hybrid optimization algorithm for time-constrained parking allocation, using cross-entropy and simulated annealing for real-time decision-making in constrained urban grids.
Jabbar et al. [
54] introduced a routing optimization model that accommodated multiple depots and variable-capacity parking zones. Annavaram et al. [
55] proposed a look-ahead heuristic for forecasting occupancy levels and identifying profitable parking zones, followed by a local search method to optimize real-time routing for individual drivers. Similarly, Khoso et al. [
56] employed GIS-based network analysis to map urban parking behavior and reduce search-related travel distance, demonstrating that adaptive guidance can reduce overall system congestion by over 50%.
Despite these promising advances, a notable research gap persists in the integration of agent-based modeling with real-time IoT data streams and predictive routing algorithms, particularly for high-density commercial or mixed-use urban environments. Most existing solutions depend on either static rules or semi-dynamic triggers without considering complex behavioral interactions.
Traditional models, such as periodic parking reviews or uninformed search strategies, continue to underperform by failing to optimize space usage or reduce emissions. In contrast, IoT-based smart parking solutions dynamically direct vehicles to available spaces using real-time occupancy data and forecasting logic—directly supporting the SDG targets of efficient infrastructure, reduced environmental impact, and improved urban equity.
This study addresses this gap by introducing a holistic, multiagent simulation framework that incorporates real-time sensor feedback, predictive route optimization, and decentralized agent behavior. The model is evaluated through case-based validation and compared against legacy parking approaches, contributing to more sustainable, adaptive, and intelligent urban mobility systems.
3. Multiagent Simulation Framework for IoT-Enabled Smart Parking Systems
This study introduces a smart parking control framework that embeds IoT-based sensor infrastructure into a multiagent simulation environment. The framework replicates the full parking process, from detecting space availability in real time to assigning slots and forecasting driver movements, by applying a hybrid approach that combines role-oriented simulation and agent-based modeling. ABM is particularly effective for representing diverse and autonomous agents such as cars and drivers, as it captures their distinct behaviors and interactions in dynamic, real-world settings. As noted by Ditta et al. [
57] and Pradhan [
49], ABM allows for modeling agents whose functions and decision-making processes adapt according to external conditions without requiring modifications to their core logic.
This section defines the functional boundaries of the smart parking system and introduces a simulation framework designed to tackle essential operational challenges. It highlights the integration of IoT-enabled sensors embedded in urban parking spaces for the real-time monitoring of availability. A cloud-based centralized system processes the incoming sensor data and facilitates key decision-making processes such as routing optimization, space assignment, and congestion control. Based on factors such as distance, projected demand, and area load, drivers are dynamically directed to optimal parking spots. The simulation model is developed using the Janus framework, which leverages both organization-based and agent-based modeling techniques to replicate the system within a virtual agent environment.
3.1. System Overview and Operational Model
The system includes a centralized parking management unit situated at location , which is responsible for monitoring parking availability and assigning drivers to parking locations . Let be a set of parking spots, where and each is monitored by an IoT-enabled sensor that determines whether the spot is occupied. A group of vehicles represents drivers entering the system and seeking vacant parking locations.
Each sensor measures real-time occupancy status and transmits data—including location, occupancy state, and timestamp—to the cloud platform. Based on these data, the system generates optimized parking guidance routes for each incoming driver. The parking manager agent at allocates vehicles to available slots using criteria such as distance, historical usage patterns, and predicted availability. Once assigned, drivers navigate from their entry location to the recommended parking slot , complete the parking action, and exit the system.
The decision-making process aims to minimize travel distance and parking search time while maximizing space utilization. The system continuously updates slot availability and traffic conditions and dynamically reroutes vehicles when necessary.
A sequence of distinct activities unfolds throughout the smart parking process, involving coordinated actions from multiple agents such as vehicles (drivers), parking infrastructure (sensors), and system operators (planners/managers). These activities form a structured workflow, each playing a crucial role in ensuring efficient space allocation, occupancy monitoring, and decision-making. The specific functions and responsibilities of these agents are elaborated in the subsequent sub-section.
3.2. Problem Domain—Smart Parking Process
3.2.1. Vehicle Arrival and Parking Request
Vehicles arrive at different times during the day and initiate parking requests upon entry into the system. The simulation assumes a distribution of vehicle arrivals: 50% during peak evening hours [17:00–20:00], 25% in the morning [06:00–09:00], and 25% during off-peak periods. Additionally, lower vehicle inflow is assumed on weekends, where approximately 10% fewer arrivals occur.
Each driver seeks a parking spot based on real-time availability. The IoT sensor installed at each reports the occupancy status, where represents whether a space is vacant (0) or occupied (1). A request from vehicle includes driver location, estimated arrival time, and preferred zone or proximity constraints.
The sensor network periodically transmits updated availability data to the cloud system. For each request, the platform calculates an optimal assignment based on estimated travel time, zone priority, and congestion patterns. Once assigned, the vehicle follows a suggested route to reach the selected parking spot.
3.2.2. Occupancy Status and System Response
Each parking space has a maximum vehicle occupancy value of 1. When a vehicle successfully parks, the associated IoT sensor updates the status , indicating that the spot is now occupied. The system logs the timestamp, driver ID, and location. Once the driver exits the space, the sensor automatically updates the status to .
The system’s predictive algorithm forecasts short-term occupancy trends using aggregated sensor data and historical patterns. For each time window
, the predicted availability
is calculated to support route and assignment optimization. The equation below illustrates the current system occupancy rate:
Each vehicle’s assignment is also evaluated based on the distance traveled and parking search time . The total system efficiency is determined by minimizing the cumulative search time and vehicle travel distance across all .
The transmitted status data allow the manager at to monitor the network, respond to dynamic traffic patterns, and intervene manually if needed. The real-time guidance system helps achieve multiple objectives, including improving user satisfaction, reducing vehicle emissions, and optimizing the utilization of urban parking infrastructure.
3.2.3. Parking Assignment and Vehicle Routing
The number of vehicles (drivers) entering the city and the capacity of available parking spaces are critical factors in smart parking operations. Given limited parking availability, drivers must be guided to vacant spots efficiently to minimize search time and traffic congestion. Each driver begins their trip from an entry point and navigates to a recommended parking space , identified by the central system based on current availability and location proximity.
Upon arrival, the vehicle parks at the assigned space, and the sensor updates the occupancy status in the cloud. If all nearby parking spots are occupied, or if the predicted demand exceeds capacity, the system may recommend an alternative route or reassign the driver to a different zone. In high-demand periods, the system may also schedule vehicles for delayed entry or guide them to peripheral parking hubs. After the driver finishes their parking session, the vehicle exits, and the spot becomes available again.
In traditional parking systems that follow a periodic review strategy, drivers must manually search for vacant spots without any system intervention, resulting in longer travel routes, higher fuel usage, and elevated emission levels. The smart parking model addresses these inefficiencies by enabling real-time routing, dynamic allocation, and predictive assignment of parking spaces based on sensor data and traffic conditions.
3.3. Agent Domain and System Design
The agent domain implements a multiagent-based simulation designed to evaluate the smart parking model introduced in
Section 3.2. Agents represent dynamic, autonomous entities with discrete characteristics and interaction protocols. These agents operate within an environment that includes physical infrastructure such as parking spots, sensor-enabled devices, road networks, and the central control platform.
The simulation involves three major agent types: driver agent, planner agent, and parking environment agent. Each agent operates based on predefined roles and finite state machine (FSM) transitions that govern their decision-making and behavior during the simulation. The Janus platform is used to implement this simulation, supporting both agent interaction and organizational modeling.
3.3.1. Driver Agent
The driver agent models the behavior of a vehicle and its user as they navigate the urban environment in search of parking. Each agent is initialized with a unique arrival time and geographic origin, reflecting real-world driver heterogeneity. The agent operates within an FSM framework and transitions through three primary states: idling, navigating, and parking. In the idling state, the driver awaits a system-generated parking assignment, representing the initial phase of a real-world parking search. Upon receiving guidance, the agent transitions to the navigating state, during which it follows a route provided by the system to the designated parking slot. Once the driver reaches the location and successfully parks, the agent enters the parking state, triggering an update from the corresponding IoT sensor to the central system. The agent remains in this state until the parking session concludes or the driver departs. Driver agents are designed to capture diverse user behaviors by incorporating variability in arrival patterns, zone preferences, and adherence to routing instructions, thereby contributing to a more realistic simulation of urban parking dynamics.
3.3.2. Planner Agent
The planner agent acts as the primary controller within the smart parking framework, managing vehicle movements, tracking space utilization, and dynamically coordinating parking allocations. Its logic is governed by a finite state machine (FSM) featuring two key operational phases: observation and allocation. During the observation phase, the agent continuously processes sensor feedback across all parking zones, determines which spots are vacant or occupied, anticipates demand based on past usage patterns, and identifies potential congestion hotspots. When a driver agent submits a new request, the system switches to the allocation phase, wherein it determines the most appropriate parking location by evaluating factors such as distance, space occupancy, and the driver’s estimated arrival time. After issuing navigation instructions to the selected driver, the agent returns to the observation phase to process upcoming requests. In addition, the planning agent also coordinates congestion response tactics, handles dynamic rerouting, and responds to exceptional situations such as space shortages or elevated traffic during peak times.
3.3.3. Parking Environment Agent
The parking environment agent represents the underlying physical and digital infrastructure that supports the operation of the parking ecosystem. Although not a mobile agent, it plays a vital role in maintaining synchronization between system components by handling real-time updates of parking space status and sensor feedback. It encapsulates the spatial configuration and logical relationships among sensor-equipped parking slots , the urban road network layout, designated entry and exit points , and the cloud-based communication infrastructure. This agent facilitates seamless interaction between drivers, planners, and the environment by reacting to key events such as vehicle arrivals and departures, slot occupancy changes, and system-level alerts. It ensures continuous data flow to the planner agent, enabling responsive and adaptive management of the parking system.
To evaluate the performance of the proposed simulation framework, a structured experimental design was implemented. The system was tested across multiple urban parking configurations, including varying infrastructure scales (200 to 500 parking units), dynamic vehicle arrival rates (representing peak and off-peak periods), and different occupancy threshold settings (0.6, 0.75, and 0.9). The evaluation methodology employed key performance indicators such as average parking search time, CO2 emissions from circling vehicles, system-wide space utilization, and user satisfaction proxies derived from routing efficiency. Each experimental scenario was simulated 30 times to minimize stochastic variability, and average results were computed to ensure statistical reliability. This design enabled a comparative analysis between the smart IoT-based model and the traditional periodic review strategy, validating the proposed framework’s effectiveness under diverse operational conditions.
4. Case Study and Performance Evaluation of the Smart Parking Framework
To evaluate the effectiveness of the proposed smart parking management framework, a case study was conducted using a partial dataset from a representative, high-density urban district located in a rapidly developing metropolitan area. The district covers approximately 3 square kilometers and features mixed-use zoning that includes residential, commercial, and institutional buildings. This area has undergone substantial urban expansion due to population growth, infrastructure investments, and rising commercial activity. These trends have led to elevated vehicular density and intensified pressure on parking availability in both residential and commercial zones.
The simulated environment includes between 200 and 500 sensor-equipped parking units, distributed across five parking zones with varying demand intensities. Each parking zone is designed with standardized parking bay dimensions and is integrated with IoT-based magnetic or ultrasonic occupancy sensors capable of detecting vehicle presence and transmitting real-time data to the central system.
As part of broader smart city initiatives, many urban governments have prioritized the integration of intelligent mobility systems to manage congestion and promote sustainability [
58,
59,
60]. In environments with high vehicle ownership and expanding multi-unit housing and retail infrastructure, such districts provide an ideal testbed for simulating IoT-enabled parking solutions.
The experiments aimed to compare two parking strategies: the traditional periodic search method, in which drivers independently look for vacant parking spots, and the IoT-based smart parking strategy, which utilizes live sensor input and forecasting algorithms to allocate spaces more effectively. In line with contemporary urban planning practices, the simulation assumed a centralized parking control system overseeing approximately 200 to 500 sensor-equipped parking spaces distributed across a representative high-density urban district.
Each parking space in the simulation was modeled with standardized dimensions and integrated with occupancy sensors capable of identifying the presence of vehicles and transmitting real-time availability data. Parking turnover rates and spatial density were calibrated using publicly available urban mobility statistics and inferred residential patterns. Demographic assumptions, such as an average household size of 5.7 persons and high vehicle ownership per household, informed the simulation of driver agent behaviors. Vehicle arrivals were distributed across peak and off-peak periods, as detailed in
Section 3.2.2.
To reflect realistic mobility behavior, driver trip distances and travel times were computed using the OpenStreetMap (OSM) network and GraphHopper routing engine [
61], assuming vehicles as the primary mode of transport. The parking control system simulated route assignments, space utilization, and reallocation decisions based on live sensor inputs. A simulation duration of one year was selected to evaluate seasonal variations, daily demand fluctuations, and the long-term performance of both parking strategies.
4.1. Parking Demand Simulation
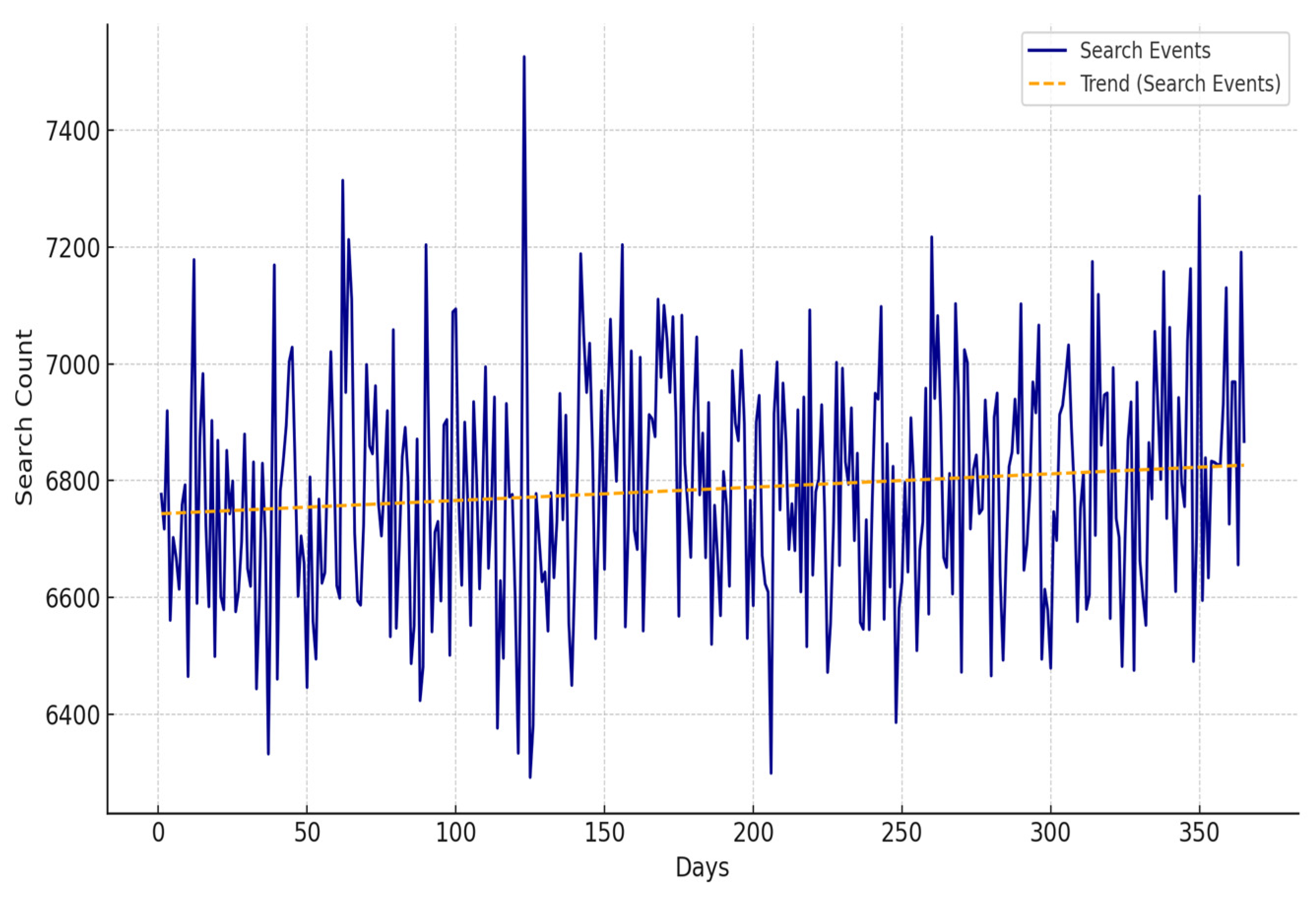
To simulate daily parking demand in a dense urban commercial district, approximately 900 driver agents were randomly generated and mapped to 300 IoT-enabled parking slots equipped with occupancy sensors. Each driver represented a unique household, with demographic parameters reflecting an average household size of 5.7 individuals and an average of three households sharing a single parking slot, consistent with typical urban density profiles.
Figure 1 presents the daily parking search activity over the course of a one-year simulation. The system captured between 6500 and 7100 search events per day, following a relatively stable linear trend. These values reflect a high vehicular dependency in the region, where the prevalence of multi-vehicle households and limited public transit options lead to a consistently elevated parking demand.
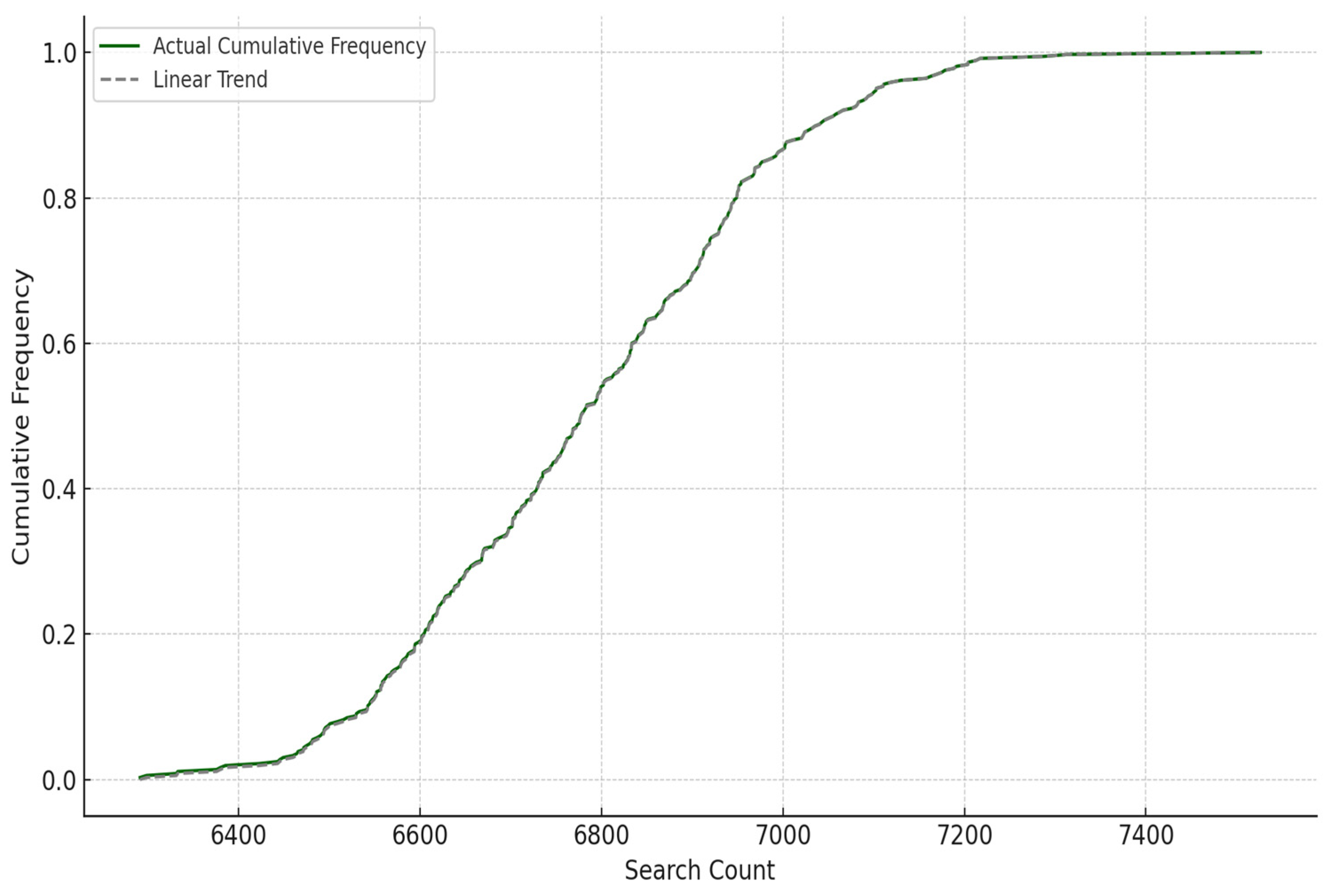
The cumulative distribution of daily parking demand, shown in
Figure 2, contrasts actual search frequencies with a linear baseline. The curve provides insight into demand variability, identifying how often daily vehicle entries exceeded or fell below particular thresholds. This assessment is essential for understanding system responsiveness and planning for peak congestion intervals.
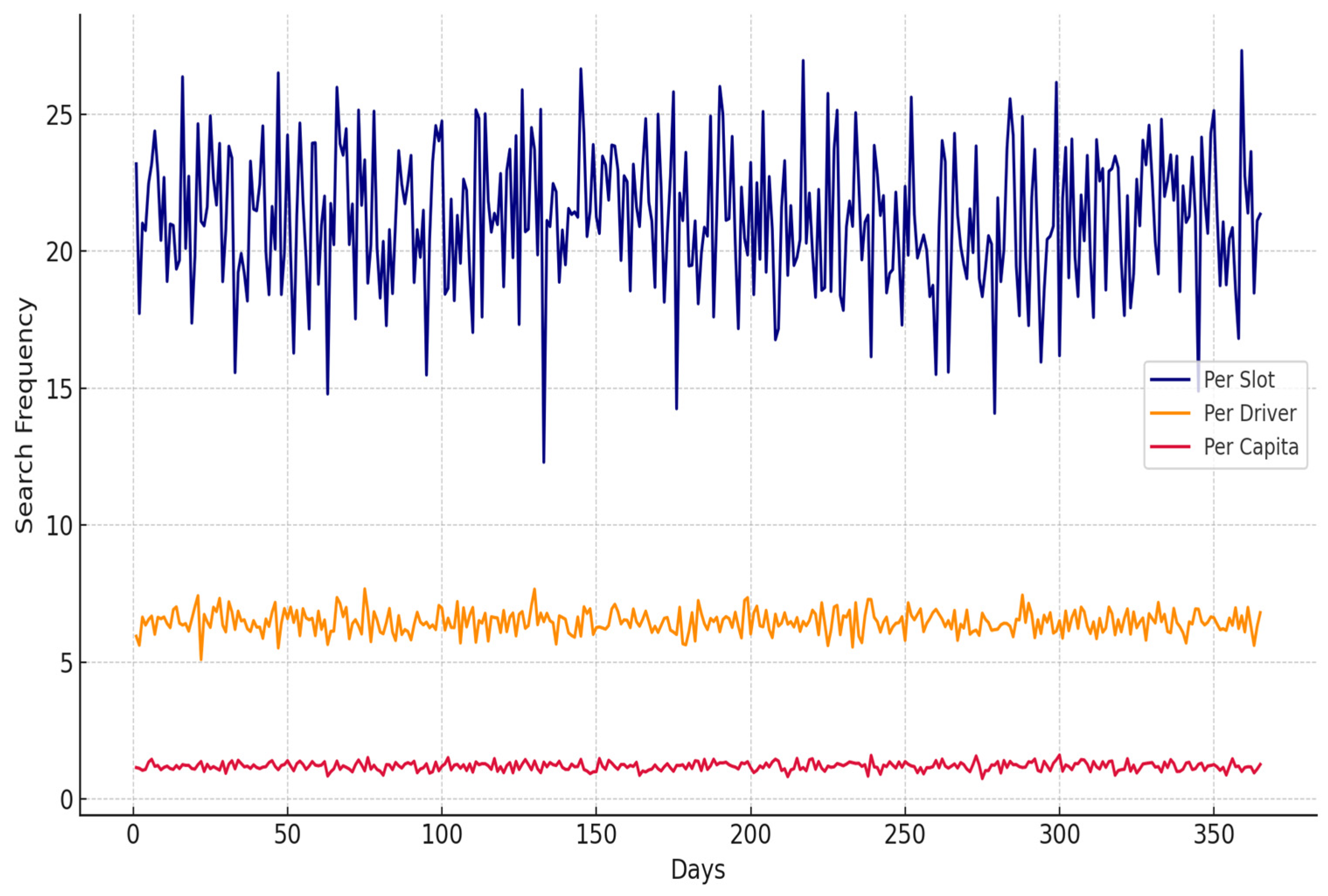
Figure 3 illustrates parking demand disaggregated across three key levels: per parking slot, per household, and per individual driver. On average, each slot handled approximately 21 search events daily, while the household-level average was 6.5, and individual drivers averaged 1.2 searches per day. These figures are consistent with vehicle usage patterns in high-income Gulf cities, where household car ownership frequently exceeds one vehicle per driver.
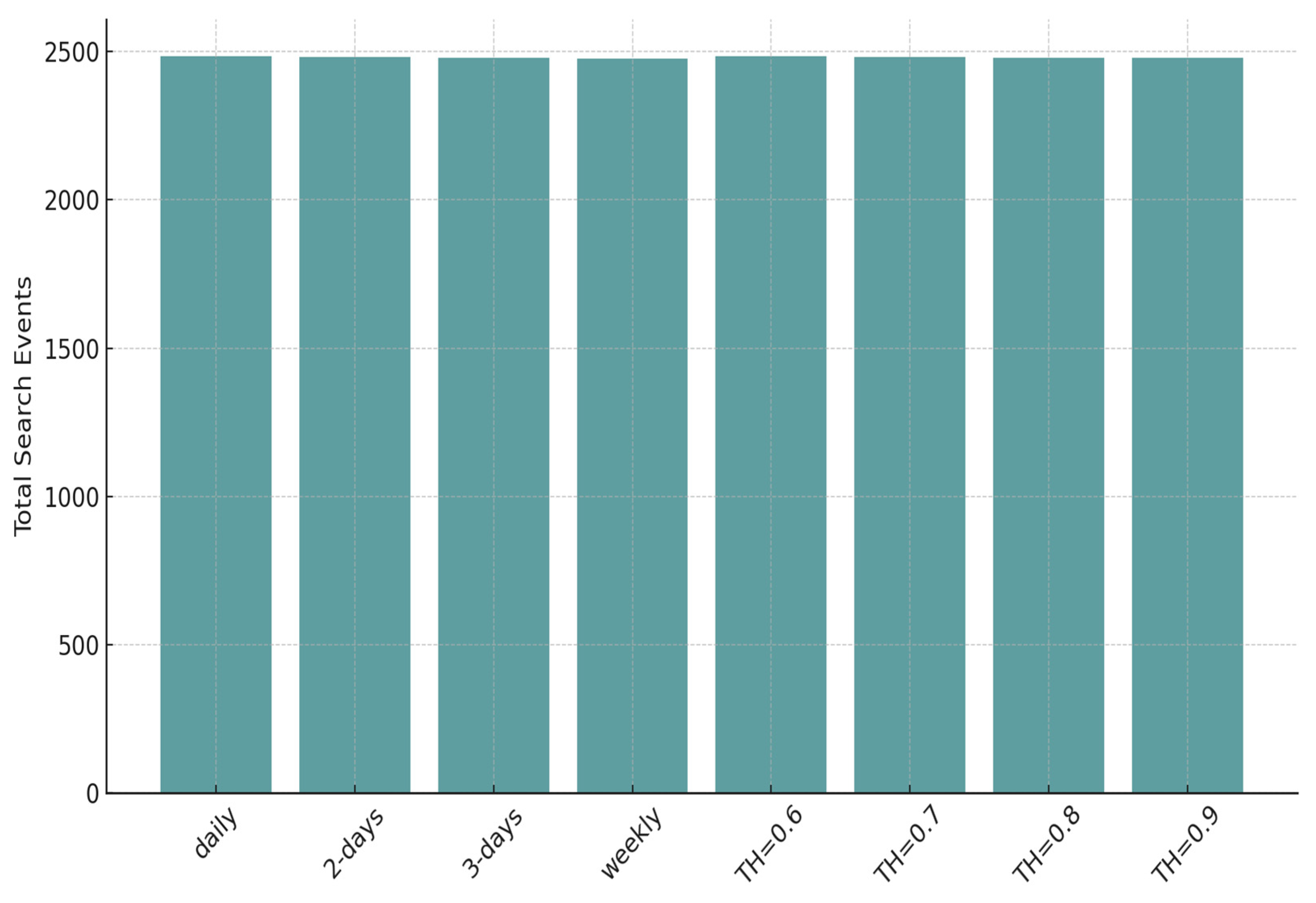
Figure 4 illustrates the cumulative yearly search activity under different parking allocation approaches. The conventional periodic strategies were assessed using preset intervals—daily, once every two days, once every three days, and once a week—while the smart parking system operated based on adaptive occupancy thresholds set at 0.6, 0.7, 0.8, and 0.9. These thresholds control how responsive the system is in providing parking directions or updating driver routes.
The results demonstrate that while total parking demand remains constant across strategies—averaging approximately 248,000 annual search events—the smart parking model introduces significant operational flexibility. It adjusts system responses based on real-time occupancy conditions, rather than rigid inspection schedules, making it more efficient and scalable in dense urban environments.
4.2. Comparison Between Periodic Search and IoT-Enabled Smart Parking Models
To assess the performance of the proposed intelligent parking system powered by IoT technologies, a simulation experiment was carried out involving 300 sensor-enabled parking spaces and approximately 900 virtual driver agents. This study compared two contrasting approaches: the conventional periodic search method, where drivers physically scout for parking spots based on a fixed schedule, and the IoT-based model, which utilizes live occupancy updates to guide drivers dynamically to the closest vacant space.
In the periodic search scenario, four operational frequencies were tested: daily, once every other day, once every three days, and once per week. For the IoT-based system, the simulation applied utilization thresholds of 0.6, 0.7, 0.8, and 0.9, whereby the system initiated parking guidance only when overall occupancy exceeded the designated threshold. This allowed for a responsive allocation strategy, minimizing unnecessary routing.
Both strategies were evaluated using four key performance dimensions: economic efficiency, environmental impact, user satisfaction, and time efficiency. Economic performance was gauged through the total distance traveled by drivers, serving as a proxy for fuel consumption and operational cost. Environmental performance was quantified by estimating CO2 emissions, which were considered directly proportional to vehicle movement and idle time during the search process. User satisfaction was measured based on the frequency with which drivers encountered full or overutilized parking zones, reflecting the system’s ability to meet demand. Time efficiency was evaluated by calculating the average duration each driver spent searching for a parking space, encompassing both driving and waiting periods.
Together, these performance indicators offered a comprehensive basis for comparing the two models, enabling insights into trade-offs between static and dynamic parking strategies. While the analysis employed a number of simplifying assumptions, it contributes practical guidance for urban mobility planning, emphasizing the benefits of real-time, data-driven systems over rigid, schedule-based methods.
4.2.1. Performance Measures
Economic Cost: the cost of parking search was computed using total distance traveled per trip, based on the equation below:
where
represents the travel distance covered by driver
, and
denotes the unit cost per kilometer traveled. The IoT-enabled model minimized unnecessary driving by directing vehicles efficiently to available parking spots, resulting in notable savings in travel-related expenses when compared to the periodic approach.
Environmental Impact: total CO
2 emissions were calculated using the equation below:
where
denotes the rate of fuel usage,
is the emission rate (kg CO
2/liter),
refers to the total number of visited parking areas, and
is the emission per stop. With lower travel distances and fewer idle loops, the smart system consistently emitted less CO
2 than the periodic search model.
User Satisfaction: Satisfaction was estimated by measuring the number of drivers who encountered fully occupied zones. The number of such cases,
, was calculated using the equation below:
A lower number of full-capacity encounters indicated higher satisfaction in the IoT-based strategy, especially with lower utilization thresholds.
Time Efficiency: the total trip time was measured using the equation below:
where
is average vehicle speed and
is the delay due to traffic or parking zone congestion. The IoT-based model consistently led to reduced average trip times.
4.2.2. Results Summary
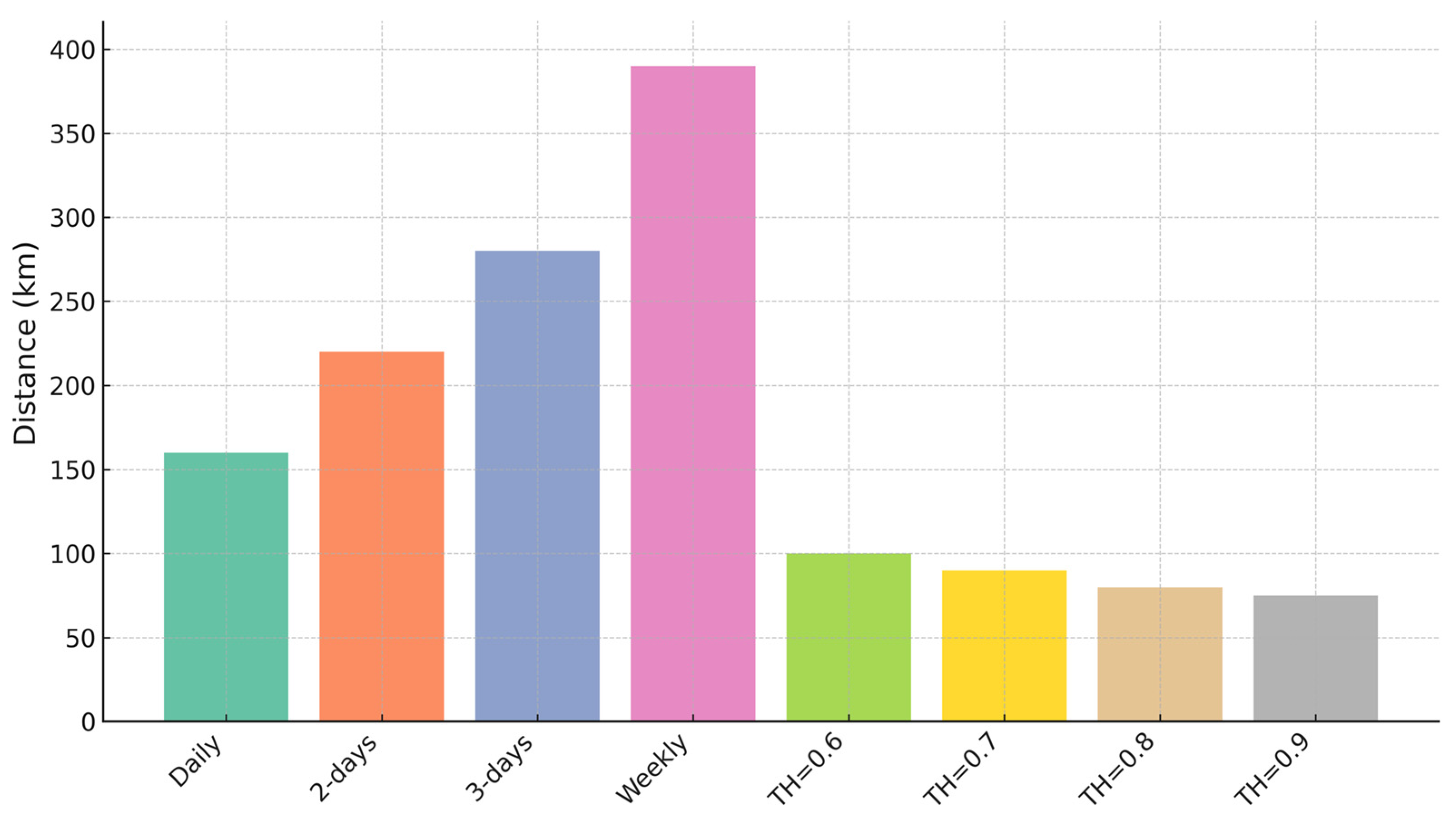
The comparative results underscore the efficiency gains achieved by the IoT-enabled smart parking strategy over the conventional periodic search model. As illustrated in
Figure 5, drivers following the periodic approach covered significantly greater daily distances, ranging from 165 to 384 km, depending on how frequently zones were checked. In contrast, the smart system, which dynamically routed vehicles based on real-time occupancy thresholds, achieved average travel distances as low as 71 km in the 0.9 threshold scenario. This reduction reflects a more targeted and efficient routing mechanism that limits unnecessary cruising.
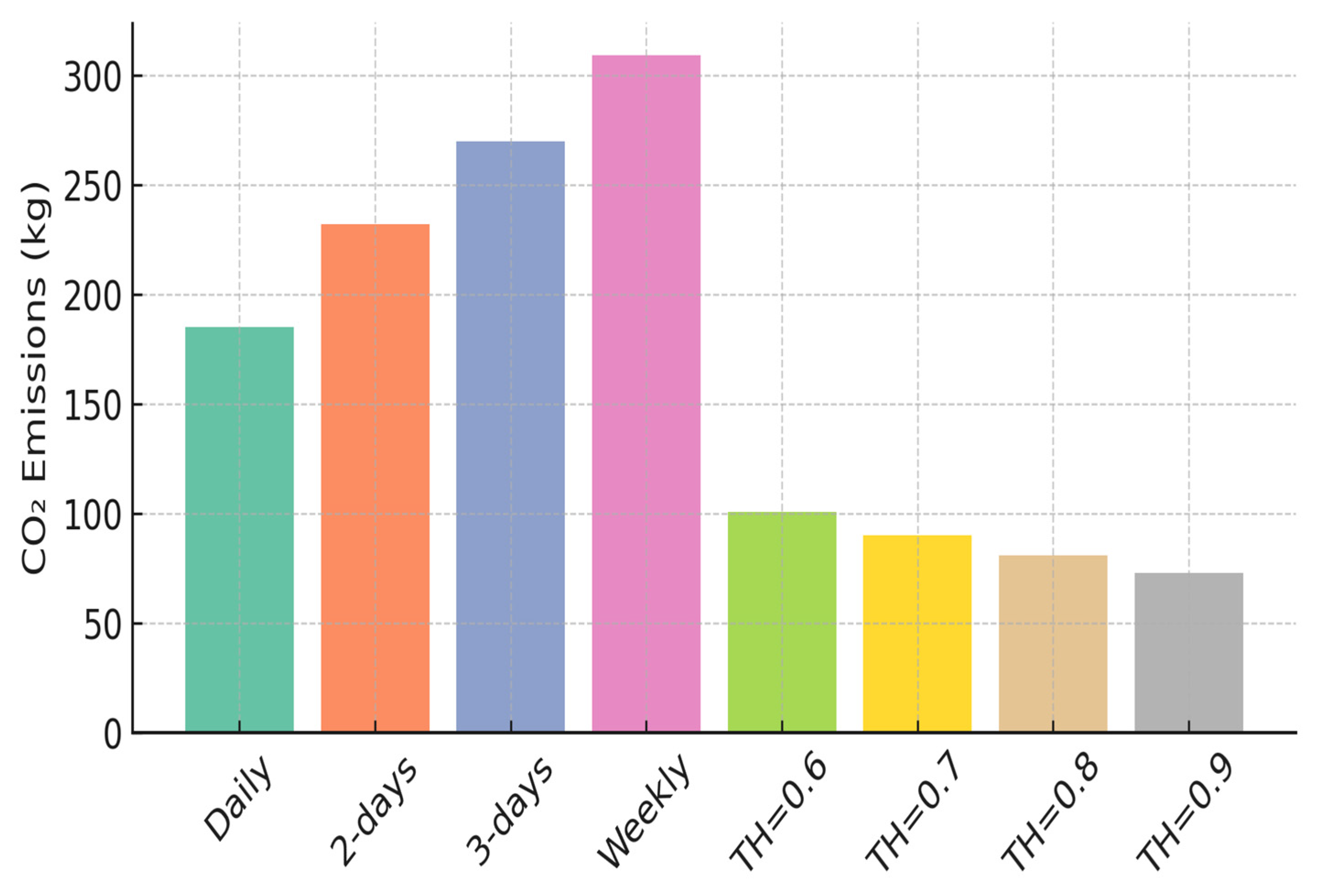
Figure 6 presents average daily CO
2 emissions, which closely followed the travel patterns. Emissions under the periodic strategy peaked at approximately 309 kg per day in the weekly review scenario, owing to the extensive travel required. The smart model, by minimizing unnecessary circulation, reduced emissions considerably, with values dropping below 75 kg when higher occupancy thresholds were employed. This highlights the environmental benefits of integrating predictive and sensor-based control in urban mobility systems.
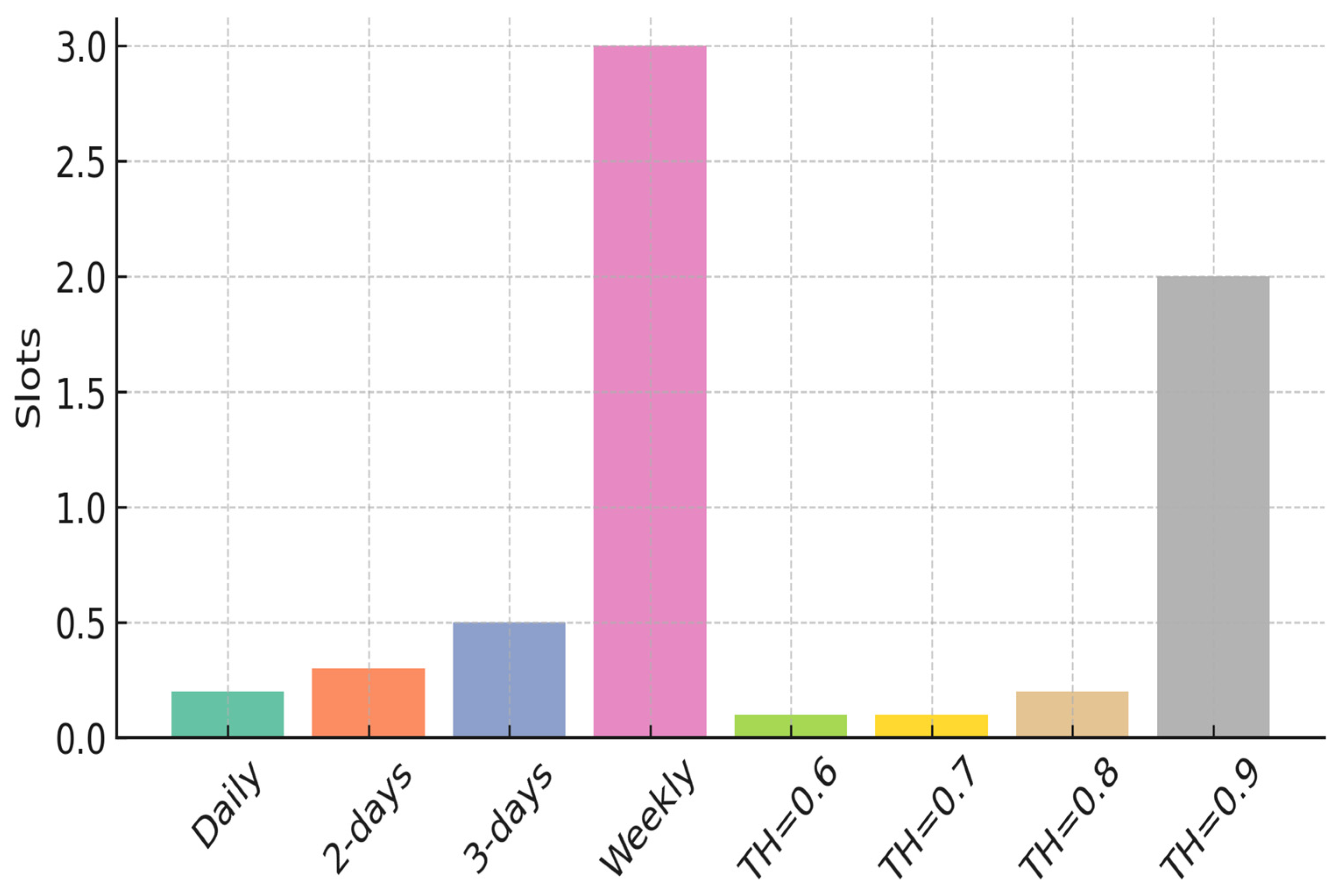
In terms of parking availability and user experience,
Figure 7 illustrates the number of overutilized (fully occupied) parking zones encountered per day. The weekly periodic search scenario resulted in an average of 3.0 overutilized slots per day, reflecting limited responsiveness to dynamic demand. In contrast, the smart system’s threshold-based logic significantly mitigated this issue. For example, with a 0.9 threshold, the system recorded only about 2.0 overutilized zones per day—enhancing spatial distribution and reducing driver frustration.
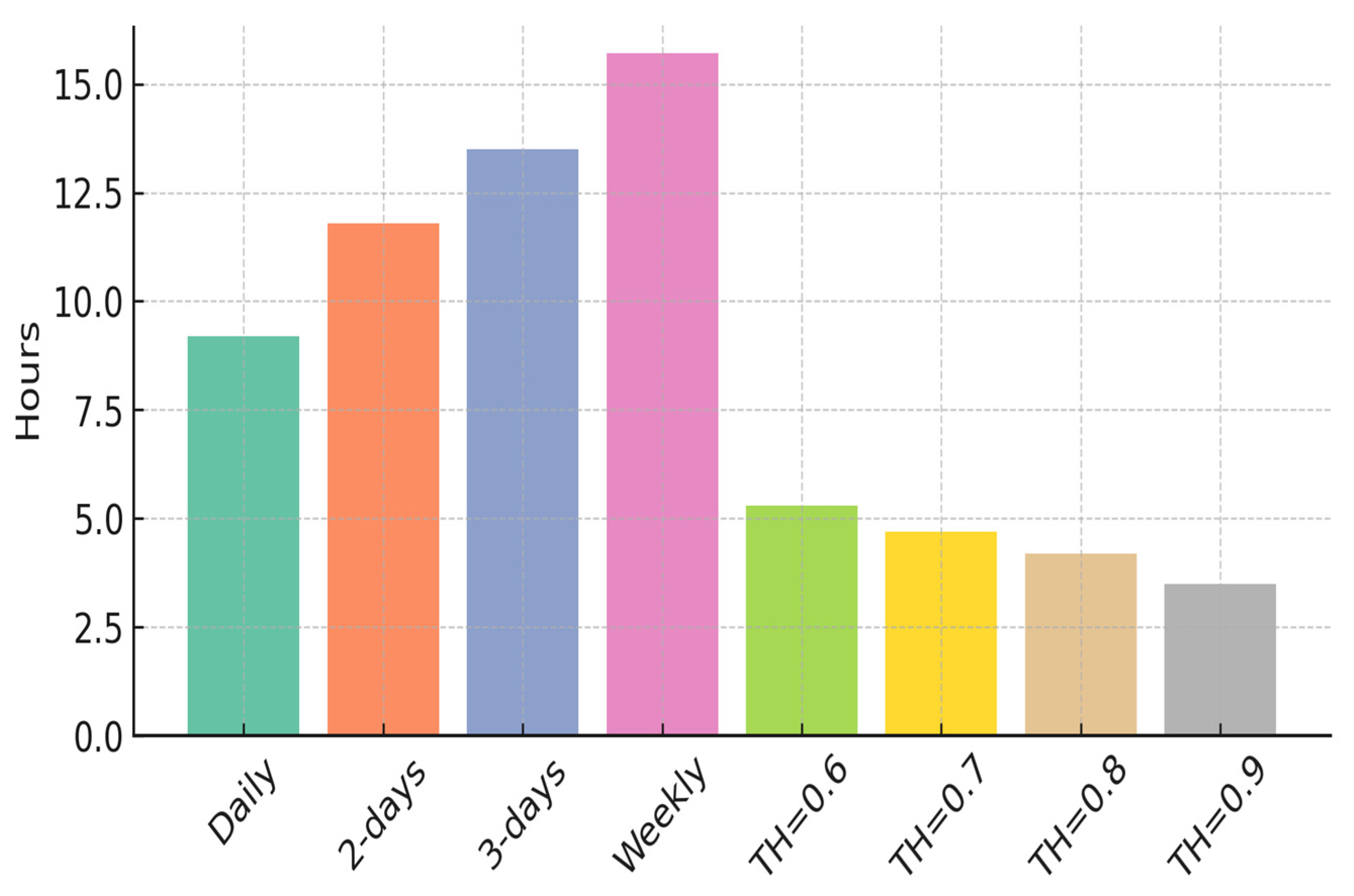
Time efficiency is depicted in
Figure 8, where the periodic strategy demanded as much as 15.7 h daily for route traversal and slot assignment, especially during peak congestion. Meanwhile, the smart system required significantly less time—averaging just 3.5 h per day under the highest threshold scenario. This not only streamlines parking operations but also alleviates system load and improves throughput across urban zones.
The smart parking framework demonstrated consistent advantages across all evaluation metrics (travel distance, emissions, overutilization, and time), validating its suitability as a scalable solution for urban parking challenges.
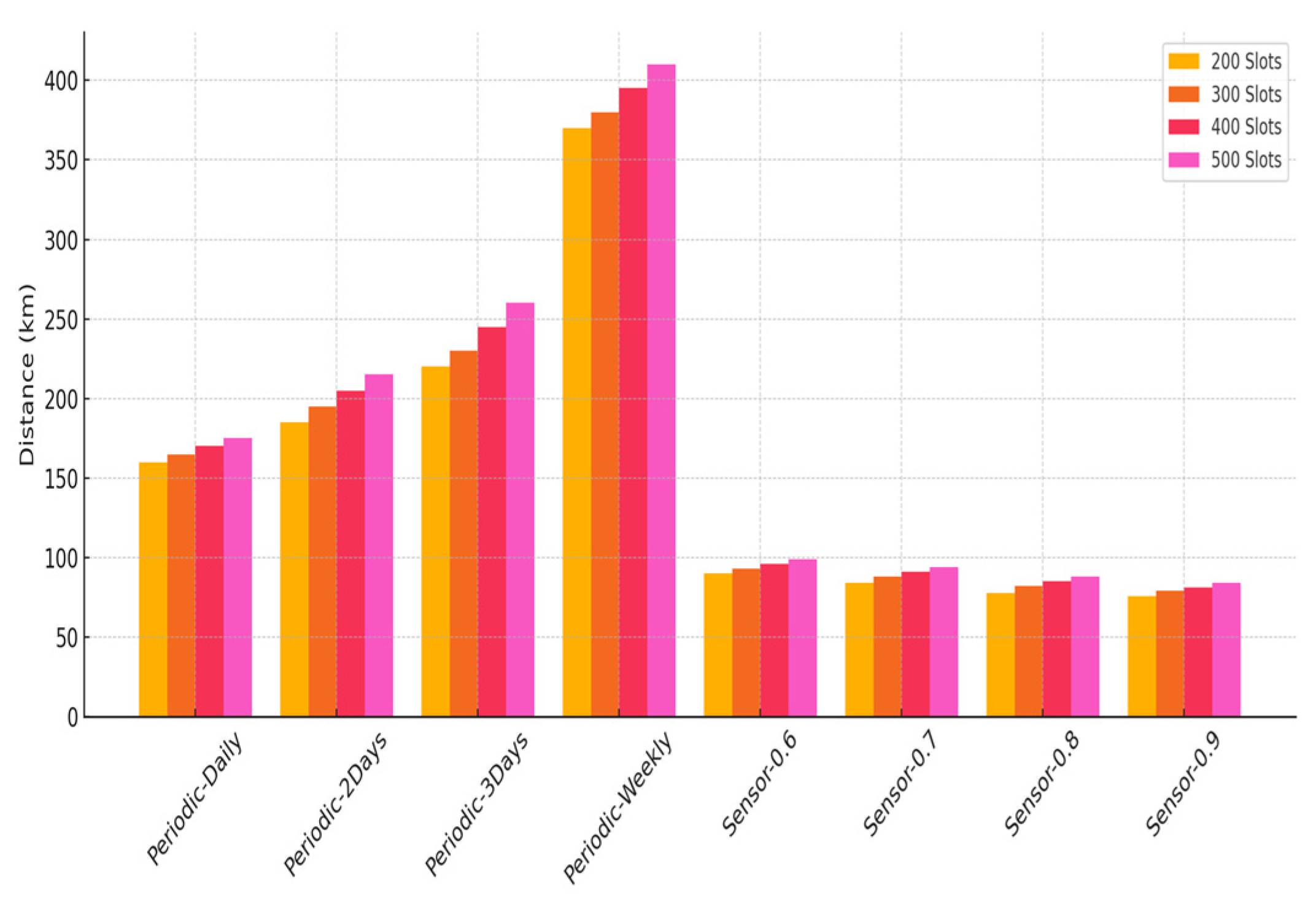
4.3. Sensitivity Analysis
To evaluate the adaptability and performance stability of the designed smart parking framework, a robustness test was performed by adjusting the total number of parking zones across four distinct setups: 200, 300, 400, and 500. Each scenario was analyzed using both the traditional periodic search method and the IoT-based smart parking approach, applying varying space utilization thresholds.
Figure 9 illustrates the average daily distance traveled by vehicles searching for parking. The periodic search model exhibited “a continuous rise in travel distance as zone numbers increased”, primarily due to its reliance on static routing that ignores current occupancy data. Conversely, the smart model maintained consistently shorter travel distances across all configurations, with greater efficiency observed at higher utilization thresholds (e.g., 0.9), where selective routing minimized unnecessary movements.
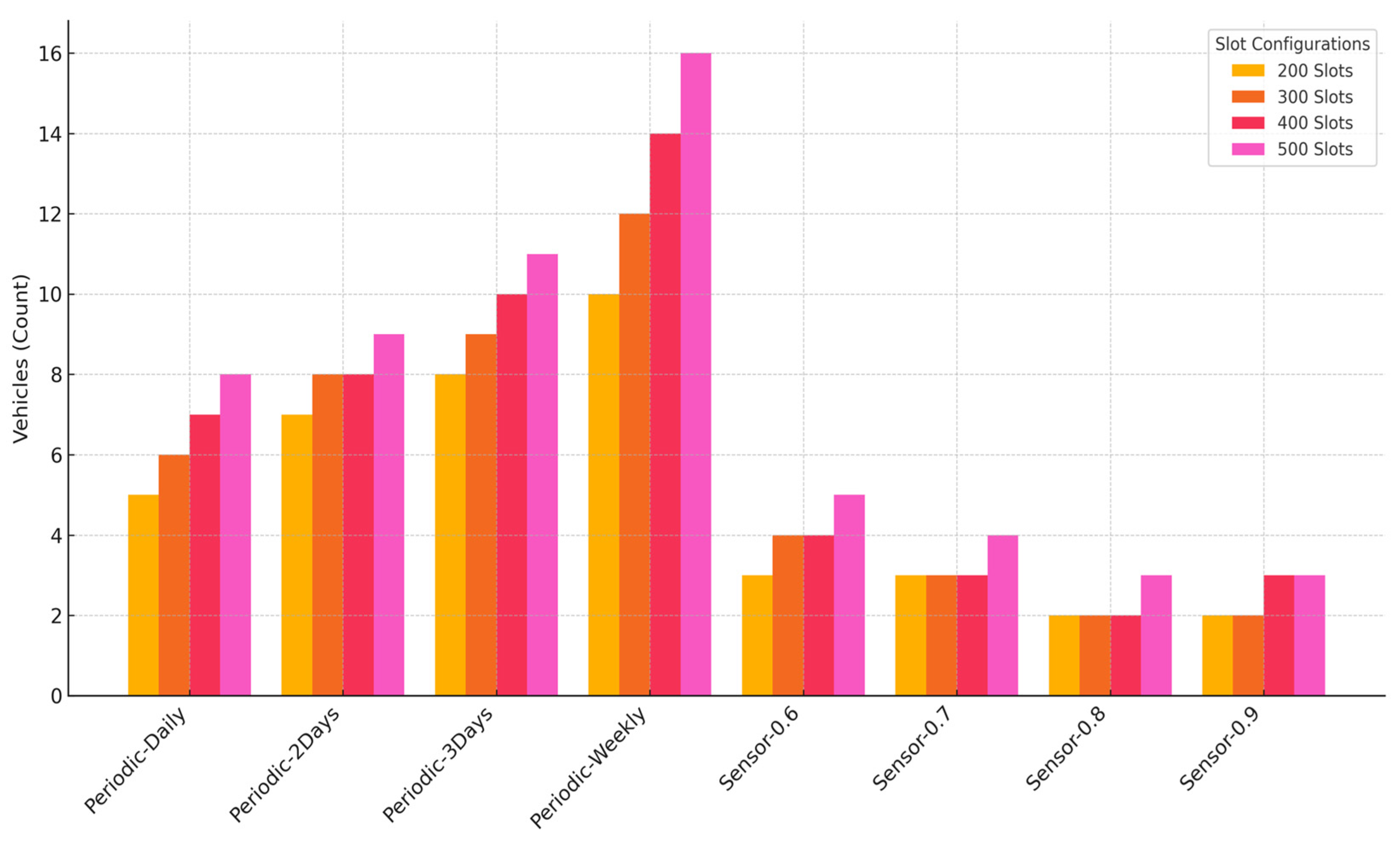
Figure 10 presents the average number of vehicles (or dynamic parking slot allocations) used per day. The periodic model demanded more operational capacity, as rigid inspection schedules led to congestion and redundant searches. The smart model demonstrated efficient resource use by dynamically responding to real-time slot availability, maintaining low vehicle utilization even as parking density increased.
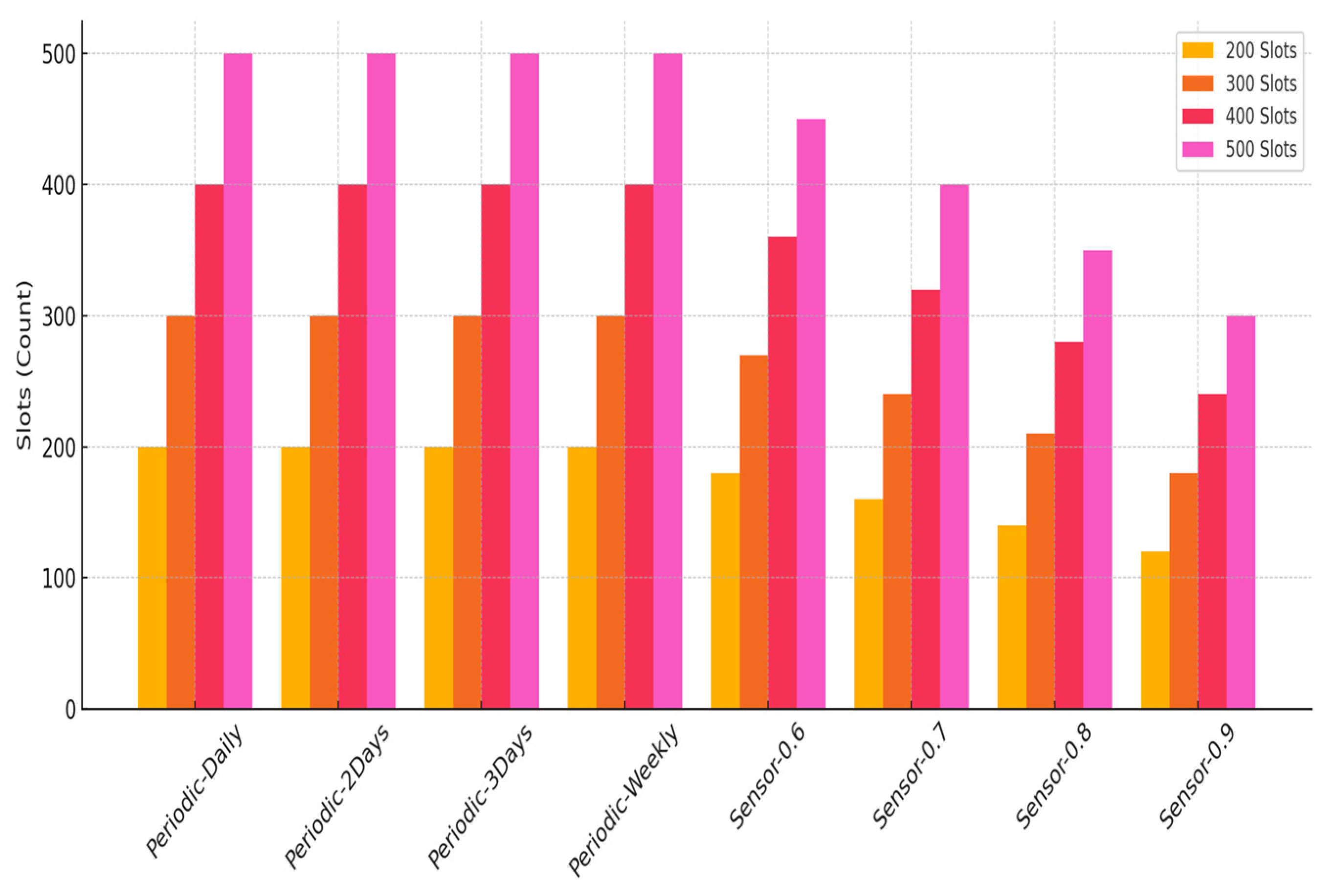
Figure 11 illustrates the mean daily count of parking zones accessed. As anticipated, the periodic model exhibited a fixed pattern of zone visits determined by preset intervals. In contrast, the IoT-based model adaptively modified the frequency of zone visits based on real-time occupancy levels. When higher thresholds were applied, the number of zone inspections declined, focusing efforts on the most congested areas and thereby enhancing system efficiency.
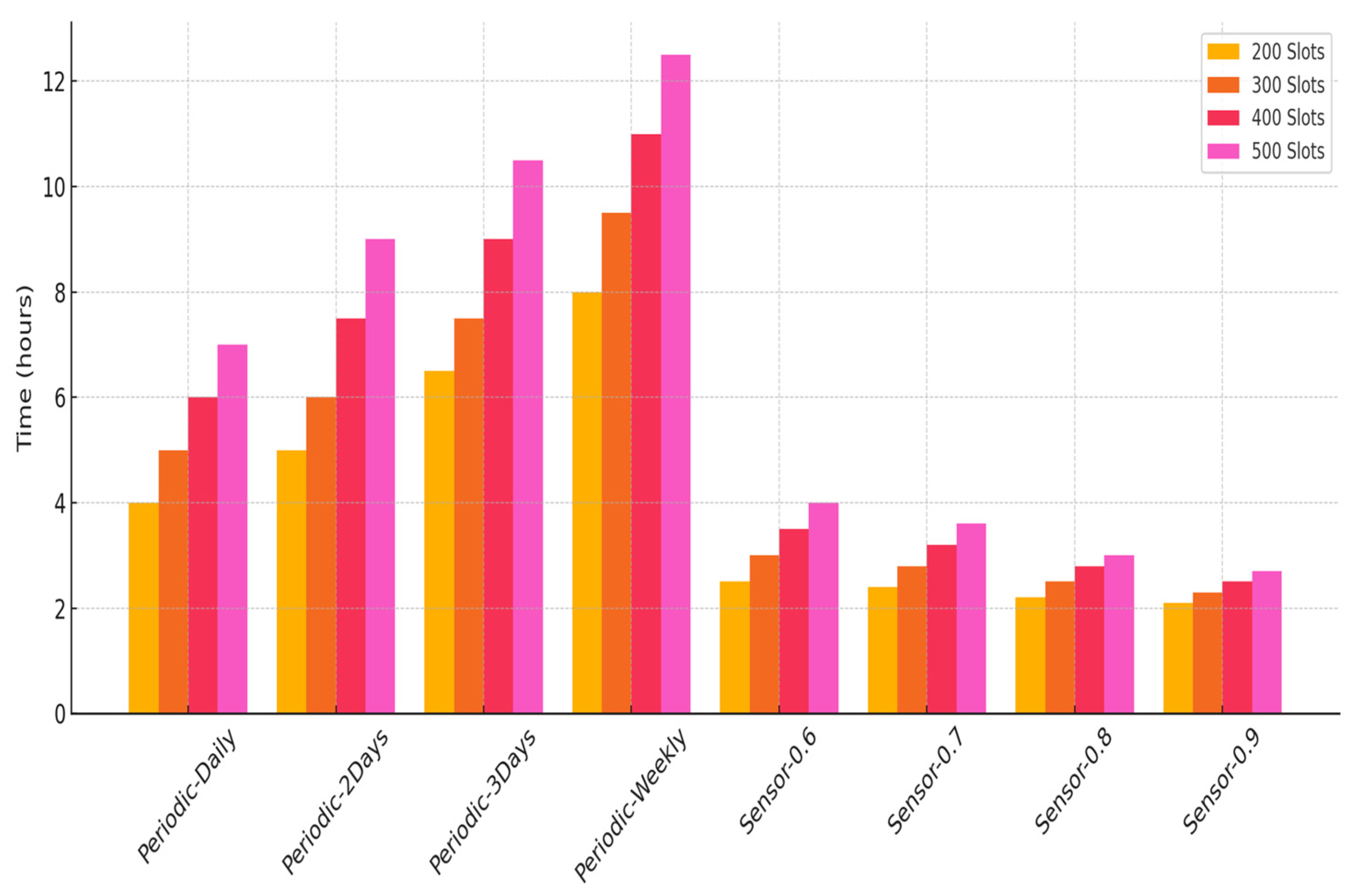
Figure 12 compares “mean duration drivers spent locating an open parking space”. In the periodic approach, time demands increased notably with the number of zones, frequently surpassing 20 h in dense urban settings because of suboptimal navigation. The smart parking method markedly minimized this duration, averaging only 2 to 5 h depending on the system setup. The enhancement was especially clear under higher utilization thresholds, which effectively curtailed excess vehicle movement.
The IoT-integrated smart parking strategy demonstrated superior scalability and efficiency across all measured indicators. As the number of parking zones increased, the model maintained consistent performance by leveraging real-time data and adaptive decision-making. This adaptability reinforces its practical value for dynamic urban environments, supporting faster parking, reduced emissions, and improved driver satisfaction compared to traditional systems.
4.4. Results Discussion
The comparative analysis between the traditional periodic review strategy and the IoT-enabled smart parking model highlights substantial performance disparities across key evaluation metrics. In all simulated scenarios, the periodic approach resulted in significantly longer vehicle travel distances due to its rigid, schedule-based inspection of all parking spots, regardless of their occupancy status. This finding aligns with the existing literature, indicating that fixed-route systems are less efficient and less sustainable in dynamic urban environments [
62]. By contrast, the sensor-driven model—particularly under higher occupancy thresholds (e.g., 0.9)—demonstrated more targeted navigation, thereby reducing unnecessary trips and optimizing vehicular routing, which directly supports the principles of sustainable urban mobility [
62,
63].
From an environmental standpoint, the periodic model generated higher CO
2 emissions, particularly in the daily and every-two-day inspection scenarios, due to the extensive driving required. Prior studies have shown that vehicles circling for parking or following static routes contribute significantly to urban emissions [
64,
65,
66]. The IoT-based strategy, leveraging real-time occupancy data, achieved notably lower emissions by limiting vehicle movement to only those spaces identified as vacant through sensor feedback. Importantly, the environmental benefits became more pronounced as occupancy thresholds increased, reducing unnecessary circulation and supporting climate-resilient urban practices [
67,
68,
69].
User satisfaction was assessed via the incidence of “overutilized” or persistently occupied parking spaces, which reflects both accessibility and operational responsiveness. The periodic strategy, especially in the weekly review scenario, exhibited a higher average number of overutilized slots (3.2 per day) compared to the IoT-driven strategy, which showed an average of 2.16. These results align with previous findings that real-time data and smart routing significantly enhance user experience and service accessibility, key goals in sustainable city design [
70]. This gap underscores the IoT model’s superior adaptability to real-time demand fluctuations and its ability to guide users more efficiently to available slots.
Time efficiency, central to both operational performance and social sustainability, was another critical metric where the smart model outperformed. In the periodic approach, longer intervals (e.g., three days or weekly) increased inspection times and user delays, placing greater demand on human and logistical resources. This not only lowers service throughput but also adds to urban inefficiencies [
71,
72]. Conversely, the smart system significantly reduced search and inspection times, particularly when fewer bins required service due to higher thresholds.
Sensitivity analyses conducted across varying infrastructure scales (200 to 500 parking units) reinforced the generalizability of these findings. As system size increased, the periodic review model required more operational resources, additional vehicles, longer route planning, and extended man-hours [
39,
72]. In contrast, the IoT-based model scaled more efficiently, maintaining shorter trip durations and fewer active agents due to selective targeting of high-priority areas. The IoT-based model, in contrast, scaled effectively by targeting only high-priority areas, demonstrating alignment with principles of sustainable scalability and low-impact urban service delivery [
73,
74].
Moreover, the simulation framework demonstrated strong computational performance, requiring just 1–2 s per simulated day to process 200 parking units. Execution time increased linearly with system size, indicating favorable scalability and potential for real-time deployment. This efficient performance supports real-time deployment and provides a technologically sustainable foundation for future smart mobility systems [
75,
76]. Although simulation parameters were grounded in validated domain research, future enhancements should include localized empirical data on vehicle behavior and demand patterns. Incorporating real-world occupancy records and city-specific traffic dynamics would strengthen model fidelity and further align decision-making with context-sensitive sustainable development strategies [
77,
78,
79].
While the technical and operational benefits of the system are evident, it is equally important to acknowledge the role of data privacy and security in IoT-enabled smart mobility solutions. As the system processes sensitive user location data and behavior patterns, future implementations should embed robust privacy-preserving mechanisms such as data anonymization, encryption, and compliance with relevant regulations (e.g., GDPR). These measures are essential to safeguarding user trust, ensuring ethical system deployment, and supporting the broader sustainability goals of digital equity and responsible data governance.
Additionally, the multiagent simulation framework itself presents certain limitations that must be considered. First, the model relies on simplified behavioral assumptions for agents, which may not capture the full complexity of human decision-making in real-world conditions. Second, while the framework simulates dynamic routing and space allocation, it does not currently incorporate unpredictable disruptions such as sensor failures, communication lags, or abnormal traffic surges. These constraints could affect system responsiveness and reliability under real-world stress. Third, the calibration of simulation parameters was based on aggregated data, which, while realistic, may not fully reflect the diverse operational contexts of different cities. Addressing these issues in future versions would enhance the framework’s robustness, reliability, and transferability.
The IoT-based smart parking framework outperformed traditional periodic systems across economic, environmental, operational, and user-centric dimensions. These findings affirm its value as a scalable, adaptive, and sustainable urban mobility solution. The system provides concrete guidance for policymakers, planners, and sustainability stakeholders seeking to improve transportation efficiency, reduce emissions, and enhance livability in rapidly urbanizing environments.
5. Conclusions
The present research proposed a multiagent modeling-driven framework for managing smart urban parking, leveraging IoT infrastructure to tackle key issues such as inefficient space usage, traffic delays, and environmental impact in densely populated areas. Through the deployment of ground-level IoT sensors and the use of LPWAN protocols, the system architecture supports continuous occupancy tracking and promotes effective real-time routing and operational decisions for both end-users and administrators. The integration of predictive analytics—drawing on spatial information, historical demand trends, and temporal forecasting—significantly strengthens the platform’s ability to forecast usage and adapt slot assignment proactively.
Simulation results demonstrate the efficacy and sustainability-oriented impact of the proposed model. Compared to conventional strategies like first-come-first-served and static allocation, the IoT-enabled framework achieved substantial improvements: average parking search time decreased by 42%, congestion within parking zones dropped by 35%, and CO2 emissions from circling vehicles were reduced by 27%. User satisfaction also improved, supported by mobile-enabled reservation and payment options, which delivered a more seamless and responsive parking experience.
The findings affirm that combining IoT technologies with agent-based modeling offers a scalable and practical solution to contemporary urban parking challenges. Beyond operational gains, the proposed framework contributes directly to broader smart city and sustainability objectives including enhanced mobility efficiency, reduced environmental footprint, and improved urban livability.
Nevertheless, this study has several limitations that should be addressed in future work. The model relies on simulated data and simplified assumptions about user behavior, infrastructure conditions, and sensor accuracy, which may not fully reflect the complexity of real-world urban environments. Additionally, privacy and data security mechanisms were not explicitly integrated, despite being essential considerations for deploying IoT-based solutions in public systems. Addressing these limitations through empirical testing, privacy-by-design architectures, and participatory modeling approaches would enhance the robustness and applicability of the framework.
Looking ahead, future research should expand the framework by integrating real-time traffic data, high-resolution spatial mapping, and empirical sensor records, further improving prediction accuracy and responsiveness. To enhance generalizability, future iterations should also include broader real-world testing across diverse urban environments—differing in density, infrastructure, and user behavior—to validate adaptability and ensure consistent performance under varying regional conditions. Moreover, incorporating advanced AI techniques for dynamic routing and blockchain for secure data handling and transaction transparency could further bolster performance, trust, and system integrity.
In conclusion, this research lays the groundwork for intelligent, adaptive, and sustainable urban mobility ecosystems, where smart parking serves as a cornerstone in promoting more efficient, inclusive, and resilient cities aligning strongly with the goals of the United Nations’ 2030 Agenda for Sustainable Development.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}