

Passive Exoskeletons to Enhance Workforce Sustainability: Literature Review and Future Research Agenda


Abstract
1. Introduction
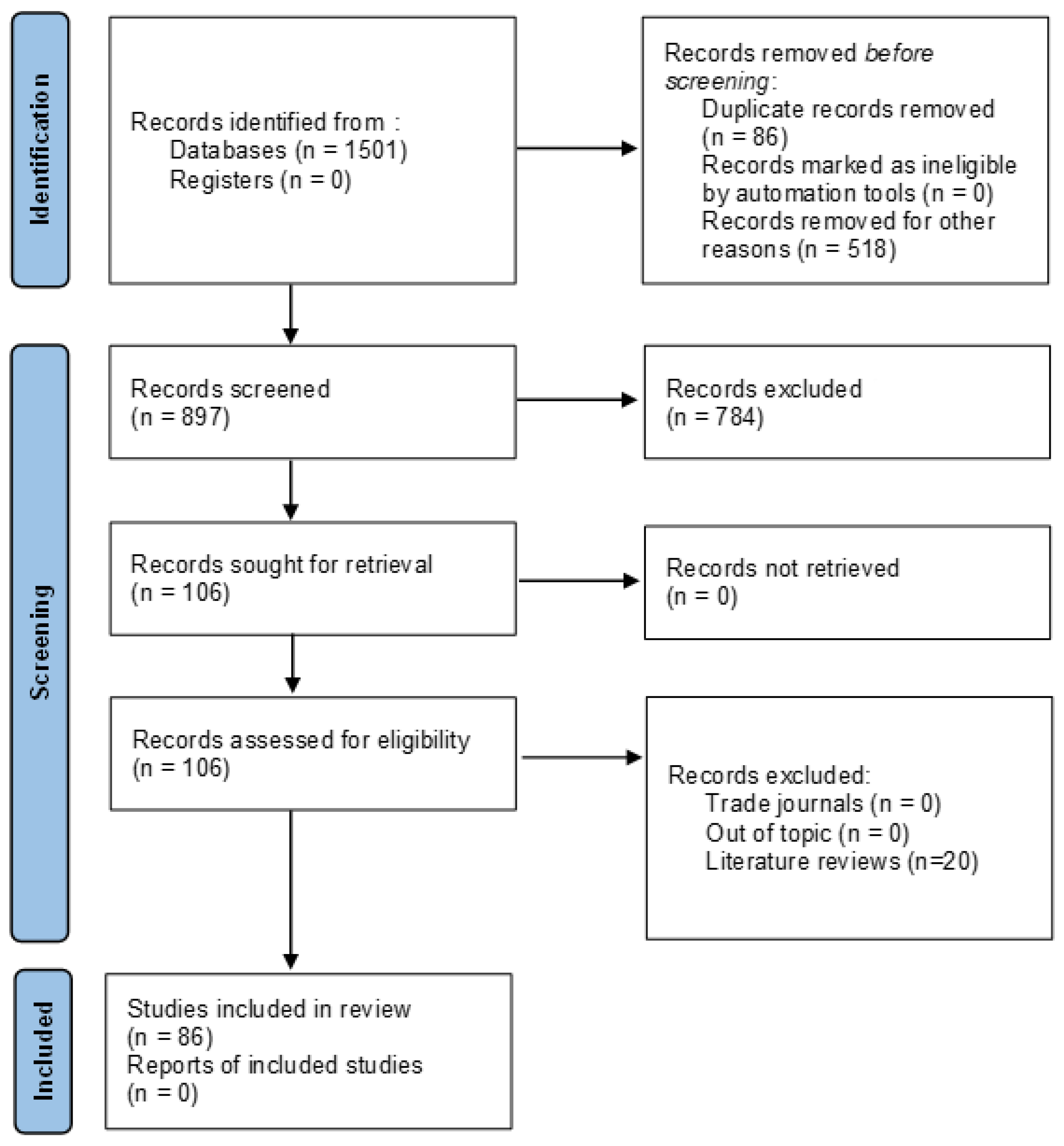
2. Methodology
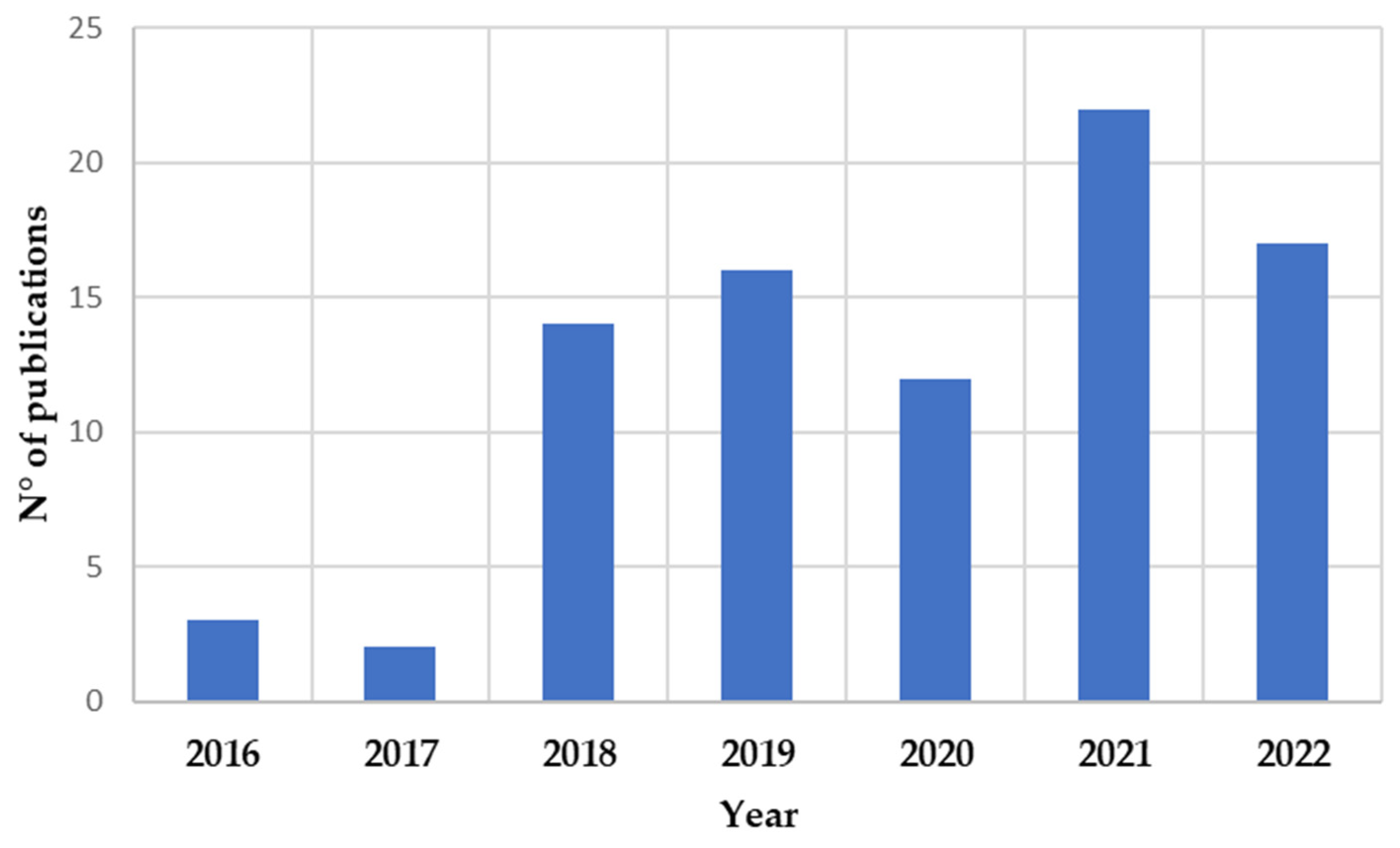
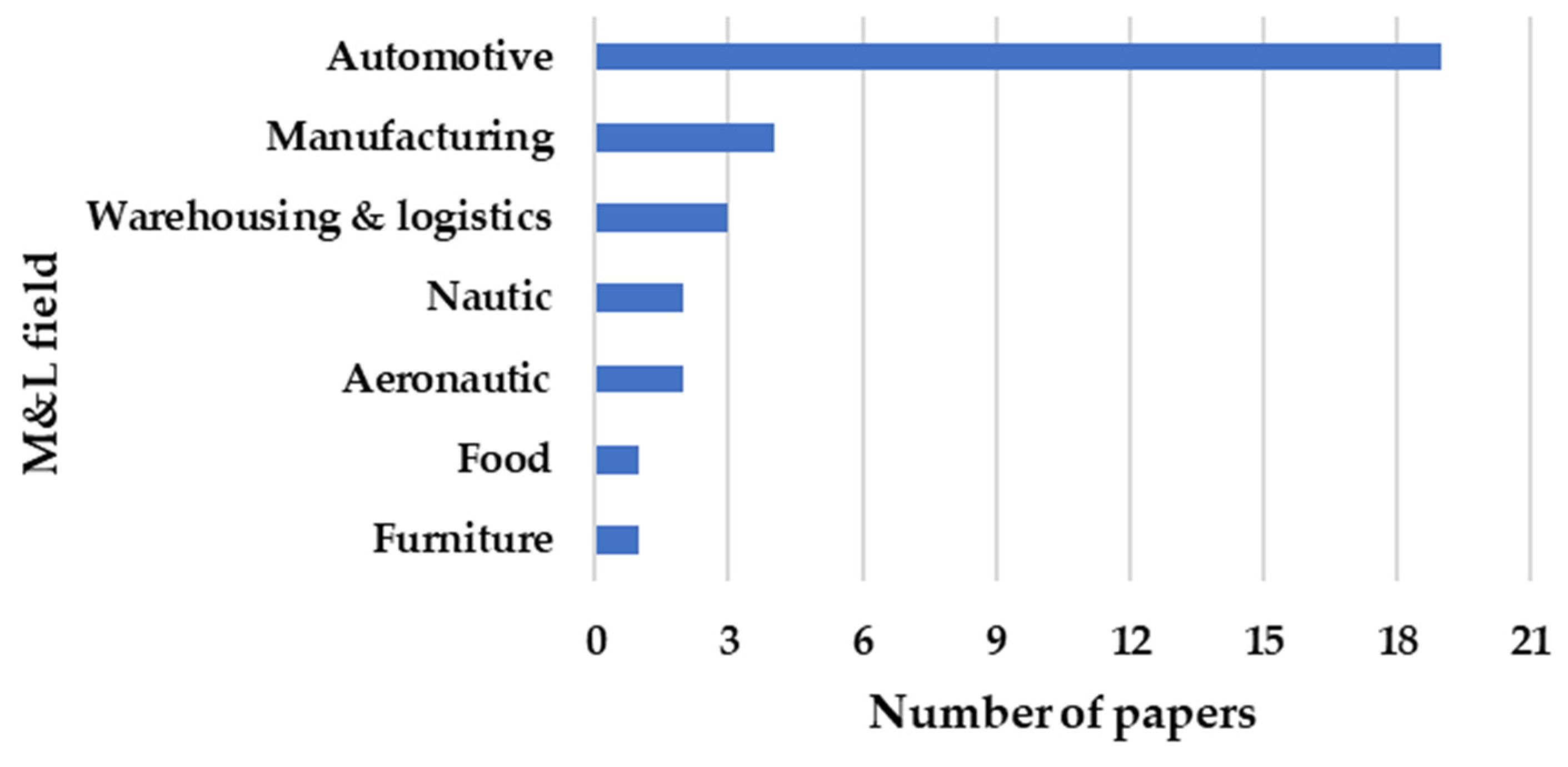
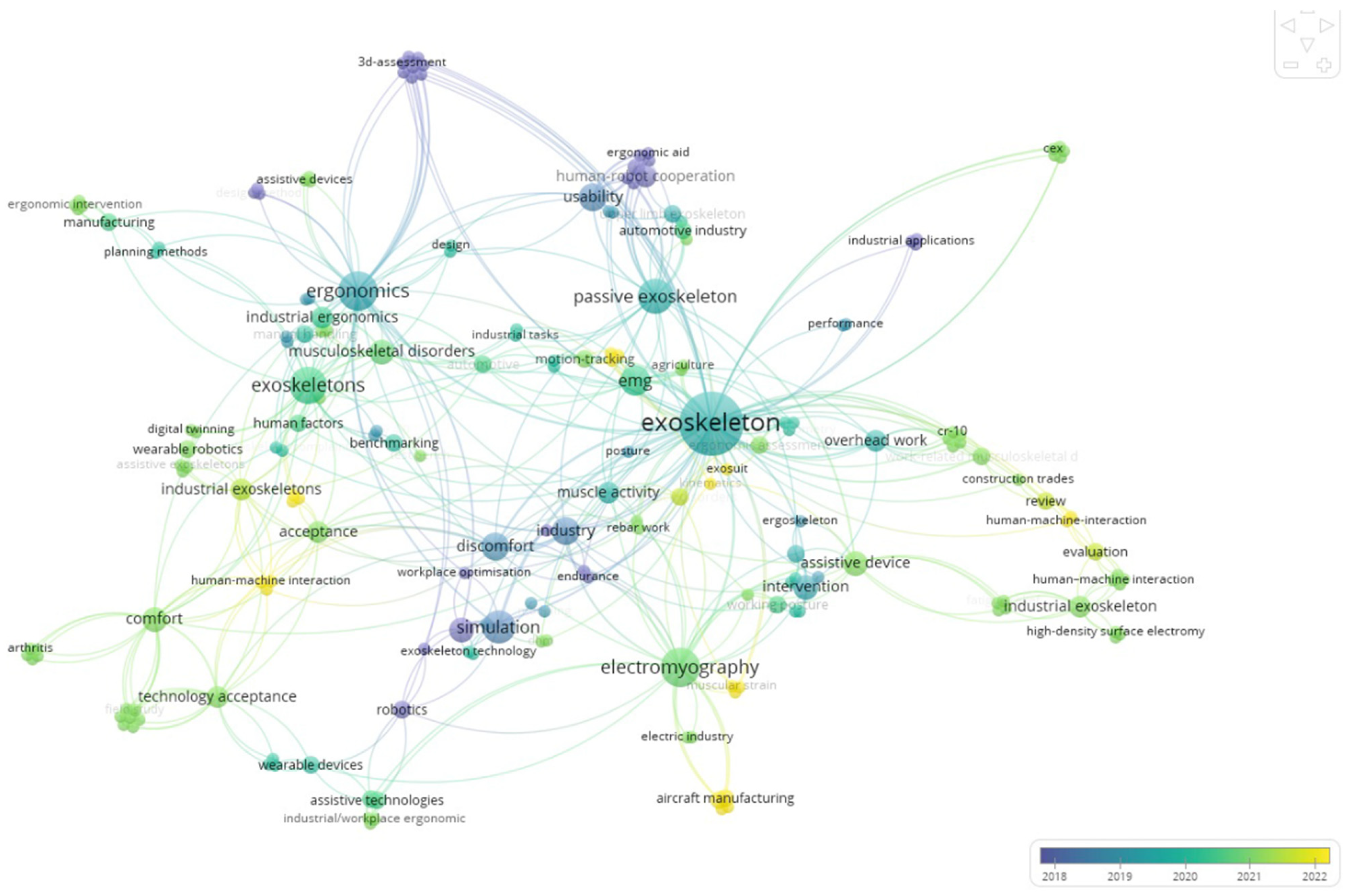
3. Descriptive Analysis
4. Content Analysis
4.1. Task-Based Categorization
4.1.1. No-Overhead Assembly
4.1.2. Overhead Assembly Tasks
4.1.3. Manufacturing Tasks
4.1.4. Material Handling Tasks
4.1.5. Order Picking Tasks
4.1.6. Motion-Related Tasks
4.2. Guidelines and Methodological Criteria
4.3. Simulation Studies
4.4. Framework and Survey
5. Discussion and Future Research Agenda
5.1. RQ1: Which Manual Tasks Can Be Supported by Passive Exoskeletons and Which Methods Have Been Applied to Assess Their Performance?
5.2. RQ2: How the Workers’ Height and Waist Size Influence the Exoskeleton Selection Process in Industrial Contexts?
5.3. RQ3: How Do Exoskeletons Influence Production Efficiency Regarding Time and Working Quality?
5.4. Future Research Agenda
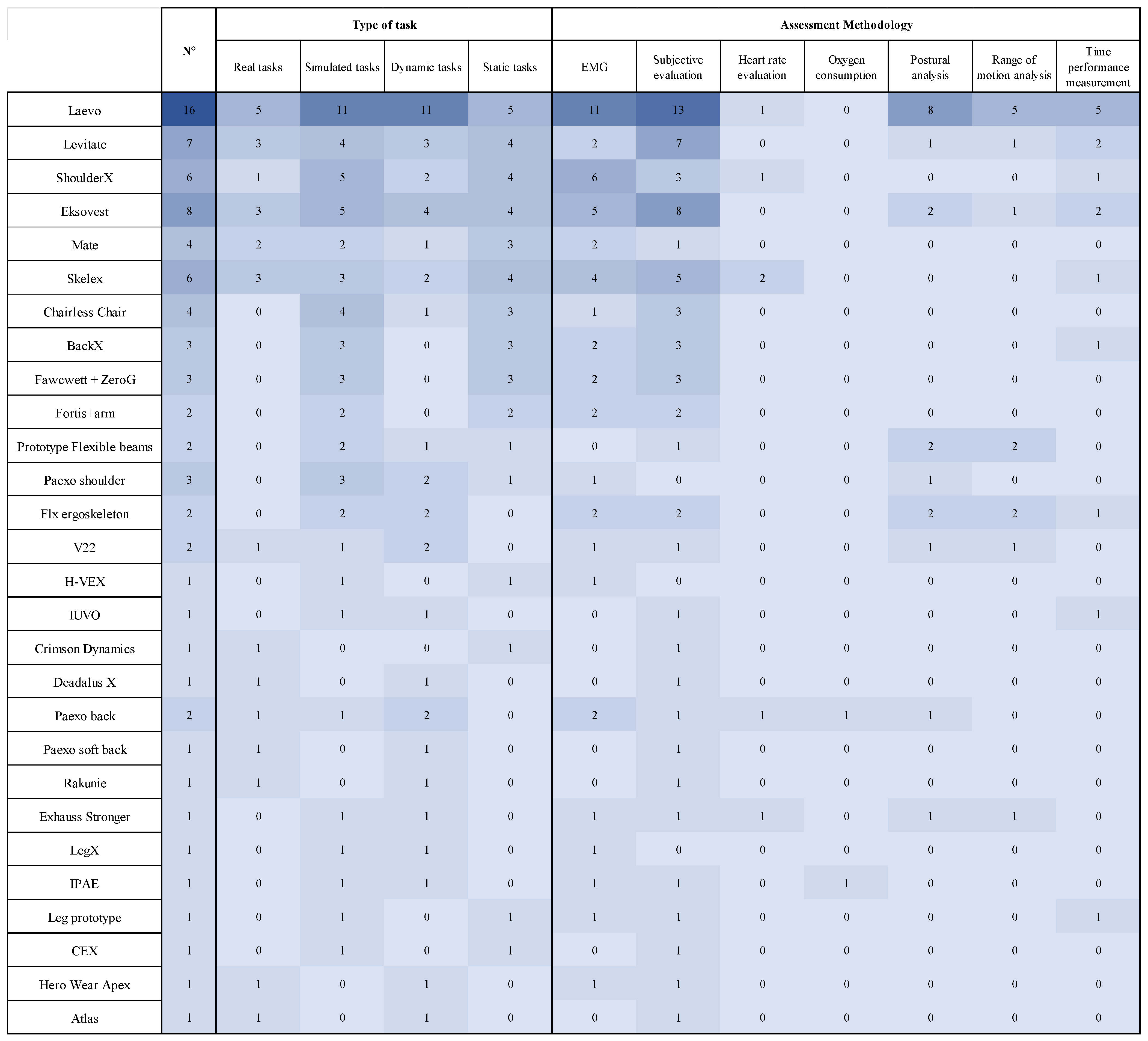
- More focus on in-field studies: The assessment studies classified in this review focused more on simulated tasks than real ones with 35 studies versus 19, respectively. More research is needed to clearly understand the impact of passive exoskeletons in the real industrial scenario. From the literature emerges a different impact of passive exoskeletons between real and laboratory-simulated tasks. In fact, Bosch et al. [35] found a 38% decrease in low back muscle activity in simulated tasks while Amandels et al. [36] recorded a 12% decrease for real tasks. This remarks that a real setting can create working conditions able to generate the natural variability of movements that cannot be captured in highly controlled laboratory settings [69].
- Production efficiency impact of exoskeletons: Only 13 studies assessed the impact of passive exoskeleton deployment on production efficiency. As emerged in Section 5.3 and Table 6, the results are contrasting (i.e., [36,37]) and not sufficient to answer this question. A challenging future research question will be the study of the effects of passive exoskeletons on production efficiency in terms of both time performances and quality variations. These parameters will be concurrent in productivity, economic evaluations, and decision making.
- Injury reduction rate estimation: Occupational injuries and WRMSDs generate absenteeism at work and all related costs for workforce management and re-scheduling and loss of productivity if shifts remain unreachable due to the lack of personnel. Managers could use these two parameters to better assess the exoskeleton deployment in factories and logistic facilities in the near future even if this approach is time-consuming and requires longer testing times and several efforts by companies. However, the literature analysis highlights the potential of passive exoskeletons to limit local muscular activations, but it is not sufficient to unreservedly promote passive exoskeletons as a WRMSD prevention technology and more research is needed in this direction [30].
- Decision support system for accelerating decision-making: From a managerial point of view, there is an urgent need to develop a decision support system to guide practitioners in selecting the appropriate exoskeleton according to the tasks the workers are asked to perform and on a robust cost/benefits analysis. Several efforts were made to provide guidelines and methodological criteria as discussed in Section 4.2, but complete industrial and cost-oriented approaches are not yet available in the literature also due to a lack of different data mentioned also in the other open point of this future research agenda.
- Predictive biomechanical models: Muscle activation variations are one of the direct effects of exoskeleton support on the human musculoskeletal system. Further research should carefully address this aspect and provide new predictive biomechanical models to enable musculoskeletal simulation for forecasting muscular effort given external load and movement as inputs instead of limiting to the EMG measurement as previously conducted by Tröster et al. [124].
- Long-term physical effects of exoskeletons: Lack of long-term testing and research is also reported by the other reviews [15,16]. Since long-term effects on the human body after prolonged use of exoskeletons are still unknown, new data on this aspect will be essential for driving future developments and implementations in industrial settings. Here, the cooperation between industry and academia will be crucial and strategic. The available testing campaigns present in the published literature consider a maximum length of exoskeleton usage of 7.7 h per day over three months of industry testing [71].
- Effect of exoskeletons on workers’ diversity, comfort and technology acceptance: There is also a need for future testing activities on balanced test samples in order to understand if there are gender-based differences and guide future design developments of exoskeletons for gender equality. In the same way, also studies over test samples that cover a broader range of experience levels and workers’ age will enable the generalization of the results to a more significant part of the working population [24]. Moreover, the integration of several key concepts from the human factors engineering discipline will be strategic to assess exoskeleton use and benefits in the context of Industry 4.0. The available literature is still not effective to demonstrate if the workforce can easily accept exoskeletons. To this purpose, the comfort level measurement needs to be better and carefully assessed by future researchThe so-called “side effects of the technology” need to be investigated also for exoskeletons since there might be side effects associated with the comfort of straps and mass of the device when worn for an entire working shift of 8 h.
- Evaluation of the return on investment in exoskeletons: On the monetary side, none of the retrieved works directly studied the return on investment (ROI). Todorovic et al. [90] showed methods for the economic evaluation of technologies in the industry that could be suitable for assessments on the introduction of exoskeletons in industrial contexts. Some relevant parameters that may affect the monetary aspect have been found by analyzing existing works classified here. Time efficiency is a key and direct parameter for evaluating the impact of exoskeletons on production efficiency. By influencing task completion times or operator endurance in demanding static positions as discussed in Section 5.3, exoskeletons could produce a tangible and measurable effect on the overall throughput of a line. Moreover, the quality (the error rate in production) could be affected by the utilization of exoskeletons and the impact on overall product quality as shown by Kim et al. [72]. The loss of quality of the production process could result in increased costs if the error rate increases and more products do not pass quality control tests, making a rework activity necessary or a complete waste of the products. Finally, the injury rate reduction will reduce absenteeism and all the related costs sustained by both the company and the collectivity, and, on the other hand, the loss of production and revenue.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
References
- Battini, D.; Berti, N.; Finco, S.; Zennaro, I.; Das, A. Towards Industry 5.0: A Multi-Objective Job Rotation Model for an Inclusive Workforce. Int. J. Prod. Econ. 2022, 250, 108619. [Google Scholar] [CrossRef]
- Berti, N.; Finco, S. Digital Twin and Human Factors in Manufacturing and Logistics Systems: State of the Art and Future Research Directions. IFAC-PapersOnLine 2022, 55, 1893–1898. [Google Scholar] [CrossRef]
- Breque, M.; De Nul, L.; Petridis, A. Industry 5.0: Towards a Sustainable, Human-Centric and Resilient European Industry; European Commission, Directorate-General for Research and Innovation: Bruxelles, Belgium, 2021. [Google Scholar]
- Daria, B.; Martina, C.; Alessandro, P.; Fabio, S.; Valentina, V.; Zennaro, I. Integrating Mocap System and Immersive Reality for Efficient Human-Centred Workstation Design. IFAC-PapersOnLine 2018, 51, 188–193. [Google Scholar] [CrossRef]
- Nasirzadeh, F.; Mir, M.; Hussain, S.; Tayarani Darbandy, M.; Khosravi, A.; Nahavandi, S.; Aisbett, B. Physical Fatigue Detection Using Entropy Analysis of Heart Rate Signals. Sustainability 2020, 12, 2714. [Google Scholar] [CrossRef]
- Battini, D.; Calzavara, M.; Otto, A.; Sgarbossa, F. The Integrated Assembly Line Balancing and Parts Feeding Problem with Ergonomics Considerations. IFAC-PapersOnLine 2016, 49, 191–196. [Google Scholar] [CrossRef]
- Lee, J.; Kim, D.; Ryoo, H.-Y.; Shin, B.-S. Sustainable Wearables: Wearable Technology for Enhancing the Quality of Human Life. Sustainability 2016, 8, 466. [Google Scholar] [CrossRef]
- Katiraee, N.; Calzavara, M.; Finco, S.; Battini, D.; Battaïa, O. Consideration of Workers’ Differences in Production Systems Modelling and Design: State of the Art and Directions for Future Research. Int. J. Prod. Res. 2021, 59, 3237–3268. [Google Scholar] [CrossRef]
- Romero, D.; Stahre, J. Towards the Resilient Operator 5.0: The Future of Work in Smart Resilient Manufacturing Systems. Procedia CIRP 2021, 104, 1089–1094. [Google Scholar] [CrossRef]
- Ashta, G.; Finco, S.; Persona, A.; Battini, D. Investigating Exoskeletons Applicability in Manufacturing and Logistics Systems: State of the Art and Future Research Directions; Summer School Francesco Turco: Riviera dei Fiori, Italy, 2022. [Google Scholar]
- De Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for Industrial Application and Their Potential Effects on Physical Work Load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef]
- De Looze, M.P.; Krause, F.; O’Sullivan, L.W. The Potential and Acceptance of Exoskeletons in Industry. In Proceedings of the 2nd International Symposium on Wearable Robotics, WeRob2016, Segovia, Spain, 18–21 October 2016; Volume 16. [Google Scholar]
- Kermavnar, T.; de Vries, A.W.; de Looze, M.P.; O’Sullivan, L.W. Effects of Industrial Back-Support Exoskeletons on Body Loading and User Experience: An Updated Systematic Review. Ergonomics 2021, 64, 685–711. [Google Scholar] [CrossRef]
- Fox, S.; Aranko, O.; Heilala, J.; Vahala, P. Exoskeletons: Comprehensive, Comparative and Critical Analyses of Their Potential to Improve Manufacturing Performance. J. Manuf. Technol. Manag. 2020, 31, 1261–1280. [Google Scholar] [CrossRef]
- Zhu, Z.; Dutta, A.; Dai, F. Exoskeletons for Manual Material Handling—A Review and Implication for Construction Applications. Autom. Constr. 2021, 122, 103493. [Google Scholar] [CrossRef]
- Kaupe, V.; Feldmann, C.; Wagner, H. Exoskeletons: Productivity and Ergonomics in Logistics—A Systematic Review. In Proceedings of the Hamburg International Conference of Logistics, Hamburg, Germany, 1 September 2021; Volume 31, pp. 527–561. [Google Scholar]
- Golabchi, A.; Chao, A.; Tavakoli, M. A Systematic Review of Industrial Exoskeletons for Injury Prevention: Efficacy Evaluation Metrics, Target Tasks, and Supported Body Postures. Sensors 2022, 22, 2714. [Google Scholar] [CrossRef] [PubMed]
- Bogue, R. Exoskeletons—A Review of Industrial Applications. Ind. Robot 2018, 45, 585–590. [Google Scholar] [CrossRef]
- Voilqué, A.; Masood, J.; Fauroux, J.C.; Sabourin, L.; Guezet, O. Industrial Exoskeleton Technology: Classification, Structural Analysis, and Structural Complexity Indicator. In Proceedings of the 2019 Wearable Robotics Association Conference, WearRAcon, Scottsdale, AZ, USA, 25–27 March 2019; pp. 13–20. [Google Scholar]
- Toxiri, S.; Näf, M.B.; Lazzaroni, M.; Fernández, J.; Sposito, M.; Poliero, T.; Monica, L.; Anastasi, S.; Caldwell, D.G.; Ortiz, J. Back-Support Exoskeletons for Occupational Use: An Overview of Technological Advances and Trends. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 237–249. [Google Scholar] [CrossRef]
- Ali, A.; Fontanari, V.; Schmoelz, W.; Agrawal, S.K. Systematic Review of Back-Support Exoskeletons and Soft Robotic Suits. Front. Bioeng. Biotechnol. 2021, 9, 765257. [Google Scholar] [CrossRef]
- Bostelman, R.; Messina, E.; Foufou, S. Cross-Industry Standard Test Method Developments: From Manufacturing to wearable Robots. Front. Inf. Technol. Electron. Eng. 2017, 18, 1447–1457. [Google Scholar] [CrossRef]
- Pesenti, M.; Antonietti, A.; Gandolla, M.; Pedrocchi, A. Towards a Functional Performance Validation Standard for Industrial Low-Back Exoskeletons: State of the Art Review. Sensors 2021, 21, 808. [Google Scholar] [CrossRef]
- Hoffmann, N.; Prokop, G.; Weidner, R. Methodologies for Evaluating Exoskeletons with Industrial Applications. Ergonomics 2022, 65, 276–295. [Google Scholar] [CrossRef]
- De Bock, S.; Ghillebert, J.; Govaerts, R.; Tassignon, B.; Rodriguez-Guerrero, C.; Crea, S.; Veneman, J.; Geeroms, J.; Meeusen, R.; De Pauw, K. Benchmarking Occupational Exoskeletons: An Evidence Mapping Systematic Review. Appl. Ergon. 2022, 98, 103582. [Google Scholar] [CrossRef]
- Kuber, P.M.; Abdollahi, M.; Alemi, M.M.; Rashedi, E. A Systematic Review on Evaluation Strategies for Field Assessment of Upper-Body Industrial Exoskeletons: Current Practices and Future Trends. Ann. Biomed. Eng. 2022, 50, 1203–1231. [Google Scholar] [CrossRef]
- Kuber, P.M.; Rashedi, E. Product Ergonomics in Industrial Exoskeletons: Potential Enhancements for Workforce Efficiency and Safety. Theor. Issues Ergon. Sci. 2020, 22, 729–752. [Google Scholar] [CrossRef]
- Massardi, S.; Rodriguez-Cianca, D.; Pinto-Fernandez, D.; Moreno, J.C.; Lancini, M.; Torricelli, D. Characterization and Evaluation of Human–Exoskeleton Interaction Dynamics: A Review. Sensors 2022, 22, 3993. [Google Scholar] [CrossRef] [PubMed]
- Bär, M.; Steinhilber, B.; Rieger, M.A.; Luger, T. The Influence of Using Exoskeletons during Occupational Tasks on Acute Physical Stress and Strain Compared to No Exoskeleton—A Systematic Review and Meta-Analysis. Appl. Ergon. 2021, 94, 103385. [Google Scholar] [CrossRef] [PubMed]
- Theurel, J.; Desbrosses, K. Occupational Exoskeletons: Overview of Their Benefits and Limitations in Preventing Work-Related Musculoskeletal Disorders. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 264–280. [Google Scholar] [CrossRef]
- Tranfield, D.; Denyer, D.; Smart, P. Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Page, M.J.; Moher, D.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. PRISMA 2020 Explanation and Elaboration: Updated Guidance and Exemplars for Reporting Systematic Reviews. BMJ 2021, 372, n160. [Google Scholar] [CrossRef] [PubMed]
- Gilotta, S.; Spada, S.; Ghibaudo, L.; Isoardi, M.; Mosso, C.O. Acceptability beyond Usability: A Manufacturing Case Study. In Proceedings of the 20th Congress of the International Ergonomics Association, Florence, Italy, 26–30 August 2018; Volume 824, ISBN 9783319960708. [Google Scholar]
- Jan, D.K.; Paul, V.; Jacqueline, S.; Georgios, R.; Martin, C.; Kees, P.; Pim, V.D.; Iñigo, I. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU; European Agency for Safety and Health at Work: Luxembourg, 2019. [Google Scholar]
- Bosch, T.; van Eck, J.; Knitel, K.; de Looze, M. The Effects of a Passive Exoskeleton on Muscle Activity, Discomfort and Endurance Time in Forward Bending Work. Appl. Ergon. 2016, 54, 212–217. [Google Scholar] [CrossRef]
- Amandels, S.; Eyndt, H.O.H.; Daenen, L.; Hermans, V. Introduction and Testing of a Passive Exoskeleton in an Industrial Working Environment. In Proceedings of the 20th Congress of the International Ergonomics Association, Florence, Italy, 26–30 August 2018; Volume 820, ISBN 9783319960821. [Google Scholar]
- Kim, S.; Madinei, S.; Alemi, M.M.; Srinivasan, D.; Nussbaum, M.A. Assessing the Potential for “Undesired” Effects of Passive Back-Support Exoskeleton Use during a Simulated Manual Assembly Task: Muscle Activity, Posture, Balance, Discomfort, and Usability. Appl. Ergon. 2020, 89, 103194. [Google Scholar] [CrossRef]
- Flor, R.; Gaspar, J.; Fujão, C.; Nunes, I.L. How Workers Perceive LAEVO Exoskeleton Use in Non-Cyclic Tasks. In Proceedings of the AHFE 2021 Virtual Conference on Human Factors and Systems Interaction, Virtual, 25–29 July 2021; Volume 265, ISBN 9783030798154. [Google Scholar]
- Luger, T.; Bär, M.; Seibt, R.; Rieger, M.A.; Steinhilber, B. Using a Back Exoskeleton During Industrial and Functional Tasks—Effects on Muscle Activity, Posture, Performance, Usability, and Wearer Discomfort in a Laboratory Trial. Hum. Factors 2021, 65, 5–21. [Google Scholar] [CrossRef]
- Luger, T.; Bär, M.; Seibt, R.; Rimmele, P.; Rieger, M.A.; Steinhilber, B. A Passive Back Exoskeleton Supporting Symmetric and Asymmetric Lifting in Stoop and Squat Posture Reduces Trunk and Hip Extensor Muscle Activity and Adjusts Body Posture—A Laboratory Study. Appl. Ergon. 2021, 97, 103530. [Google Scholar] [CrossRef] [PubMed]
- Giustetto, A.; Anjos, F.V.D.; Gallo, F.; Monferino, R.; Cerone, G.L.; Di Pardo, M.; Gazzoni, M.; Cremasco, M.M. Investigating the Effect of a Passive Trunk Exoskeleton on Local Discomfort, Perceived Effort and Spatial Distribution of Back Muscles Activity. Ergonomics 2021, 64, 1379–1392. [Google Scholar] [CrossRef] [PubMed]
- Dos Anjos, F.V.; Vieira, T.M.; Cerone, G.L.; Pinto, T.P.; Gazzoni, M. Assessment of Exoskeleton Related Changes in Kinematics and Muscle Activity. In Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Online, 13–16 October 2020; Volume 27. [Google Scholar]
- Iranzo, S.; Piedrabuena, A.; García-Torres, F.; Martinez-De-Juan, J.L.; Prats-Boluda, G.; Sanchis, M.; Belda-Lois, J.-M. Assessment of a Passive Lumbar Exoskeleton in Material Manual Handling Tasks under Laboratory Conditions. Sensors 2022, 22, 4060. [Google Scholar] [CrossRef]
- Motmans, R.; Debaets, T.; Chrispeels, S. Effect of a Passive Exoskeleton on Muscle Activity and Posture during Order Picking. In Proceedings of the 20th Congress of the International Ergonomics Association, Florence, Italy, 26–30 August 2018; Volume 820, ISBN 9783319960821. [Google Scholar]
- Kinne, S.; Kretschmer, V.; Bednorz, N. Palletising Support in Intralogistics: The Effect of a Passive Exoskeleton on Workload and Task Difficulty Considering Handling and Comfort. In Proceedings of the 2nd International Conference on Human Systems Engineering and Design (IHSED2019): Future Trends and Applications, Universität der Bundeswehr München, Munich, Germany, 16–18 September 2019; Volume 1026, ISBN 9783030279271. [Google Scholar]
- Cardoso, A.; Colim, A.; Sousa, N. The Effects of a Passive Exoskeleton on Muscle Activity and Discomfort in Industrial Tasks. In Occupational and Environmental Safety and Health II; Springer: Berlin/Heidelberg, Germany, 2020; Volume 277. [Google Scholar]
- Siedl, S.M.; Wolf, M.; Mara, M. Exoskeletons in the Supermarket: Influences of Comfort, Strain Relief and Task-Technology Fit on Retail Workers’ Post-Trial Intention to Use. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 8–11 March 2021; pp. 397–401. [Google Scholar]
- Schmalz, T.; Colienne, A.; Bywater, E.; Fritzsche, L.; Gärtner, C.; Bellmann, M.; Reimer, S.; Ernst, M. A Passive Back-Support Exoskeleton for Manual Materials Handling: Reduction of Low Back Loading and Metabolic Effort during Repetitive Lifting. IISE Trans. Occup. Ergon. Hum. Factors 2021, 10, 7–20. [Google Scholar] [CrossRef]
- Madinei, S.; Alemi, M.M.; Kim, S.; Srinivasan, D.; Nussbaum, M.A. Biomechanical Evaluation of Passive Back-Support Exoskeletons in a Precision Manual Assembly Task: “Expected” Effects on Trunk Muscle Activity, Perceived Exertion, and Task Performance. Hum. Factors 2020, 62, 441–457. [Google Scholar] [CrossRef] [PubMed]
- Gonsalves, N.J.; Ogunseiju, O.R.; Akanmu, A.A.; Nnaji, C.A. Assessment of a Passive Wearable Robot for Reducing Low Back DIsorders during Rebar Work. J. Inf. Technol. Constr. 2021, 26, 936–952. [Google Scholar] [CrossRef]
- Picchiotti, M.T.; Weston, E.B.; Knapik, G.G.; Dufour, J.S.; Marras, W.S. Impact of Two Postural Assist Exoskeletons on Biomechanical Loading of the Lumbar Spine. Appl. Ergon. 2019, 75, 1–7. [Google Scholar] [CrossRef]
- Ogunseiju, O.; Olayiwola, J.; Akanmu, A.; Olatunji, O.A. Evaluation of Postural-Assist Exoskeleton for Manual Material Handling. Eng. Constr. Archit. Manag. 2022, 29, 1358–1375. [Google Scholar] [CrossRef]
- Näf, M.B.; Koopman, A.S.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Trunk Range of Motion in the Sagittal Plane with and without a Flexible Back Support Exoskeleton. In Proceedings of the 4th International Symposium on Wearable Robotics, WeRob2018, Pisa, Italy, 16–20 October 2018; Volume 22. [Google Scholar]
- Näf, M.B.; Koopman, A.S.; Baltrusch, S.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Passive Back Support Exoskeleton Improves Range of Motion Using Flexible Beams. Front. Robot. AI 2018, 5, 72. [Google Scholar] [CrossRef]
- Qu, X.; Qu, C.; Ma, T.; Yin, P.; Zhao, N.; Xia, Y.; Qu, S. Effects of an Industrial Passive Assistive Exoskeleton on Muscle Activity, Oxygen Consumption and Subjective Responses during Lifting Tasks. PLoS ONE 2021, 16, e0245629. [Google Scholar] [CrossRef]
- Yandell, M.B.; Wolfe, A.E.; Marino, M.C.; Harris, M.P.; Zelik, K.E. Effect of a Back-Assist Exosuit on Logistics Worker Perceptions, Acceptance, and Muscle Activity. In Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Online, 13–16 October 2020; Volume 27. [Google Scholar]
- Spada, S.; Ghibaudo, L.; Gilotta, S.; Gastaldi, L.; Cavatorta, M.P. Analysis of Exoskeleton Introduction in Industrial Reality: Main Issues and EAWS Risk Assessment. In Proceedings of the AHFE 2017 International Conference on Physical Ergonomics and Human Factors, The Westin Bonaventure Hotel, Los Angeles, CA, USA, 17–21 July 2017; Volume 602, ISBN 9783319608242. [Google Scholar]
- Iranzo, S.; Piedrabuena, A.; Iordanov, D.; Martinez-Iranzo, U.; Belda-Lois, J.-M. Ergonomics Assessment of Passive Upper-Limb Exoskeletons in an Automotive Assembly Plant. Appl. Ergon. 2020, 87, 103120. [Google Scholar] [CrossRef]
- Carnazzo, C.; Spada, S.; Ghibaudo, L.; Eaton, L.; Fajardo, I.; Zhu, S.; Cavatorta, M.P. Exoskeletons in Automotive Industry: Investigation into the Applicability Across Regions. In Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), Online, 13–18 June 2021; Volume 221, ISBN 9783030746070. [Google Scholar]
- Groos, S.; Abele, N.D.; Fischer, P.; Hefferle, M.; Kluth, K. Evaluation of Physiological Costs Using Standardized Analysis Methods During Simulated Overhead Work with and Without Exoskeleton. In Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), Online, 13–18 June 2021; Volume 223, ISBN 9783030746131. [Google Scholar]
- Masood, J.; Triviño-Tonato, E.; Rivas-Gonzalez, M.D.P.; Arias-Matilla, M.D.M.; Planas-Lara, A.E. Subjective Perception of Shoulder Support Exoskeleton at Groupe PSA. In Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Online, 13–16 October 2020; Volume 27. [Google Scholar]
- Spada, S.; Ghibaudo, L.; Gilotta, S.; Gastaldi, L.; Cavatorta, M.P. Investigation into the Applicability of a Passive Upper-Limb Exoskeleton in Automotive Industry. Procedia Manuf. 2017, 11, 1255–1262. [Google Scholar] [CrossRef]
- Mouzo, F.; Michaud, F.; Lugris, U.; Masood, J.; Cuadrado, J. Evaluation of Two Upper-Limb Exoskeletons for Ceiling Welding in the Naval Industry. In Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Online, 13–16 October 2020; Volume 27. [Google Scholar]
- Van Engelhoven, L.; Poon, N.; Kazerooni, H.; Ban, A.; Rempel, D.; Harris-Adamson, C. Evaluation of an Adjustable Support Shoulder Exoskeleton on Static and Dynamic Overhead Tasks. In Proceedings of the Human Factors and Ergonomics Society, Philadelphia, PA, USA, 1–5 October 2018; Volume 2, pp. 804–808. [Google Scholar]
- Alabdulkarim, S.; Nussbaum, M.A. Influences of Different Exoskeleton Designs and Tool Mass on Physical Demands and Performance in a Simulated Overhead Drilling Task. Appl. Ergon. 2019, 74, 55–66. [Google Scholar] [CrossRef]
- Pinho, J.P.; Americano, P.P.; Taira, C.; Pereira, W.; Caparroz, E.; Forner-Cordero, A. Shoulder Muscles Electromyographic Responses in Automotive Workers Wearing a Commercial Exoskeleton. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, New Orleans, LA, USA, 4–7 November 1988; Volume 2020, pp. 4917–4920. [Google Scholar]
- Pinho, J.P.; Taira, C.; Parik-Americano, P.; Suplino, L.O.; Bartholomeu, V.P.; Hartmann, V.N.; Umemura, G.S.; Forner-Cordero, A. A Comparison between Three Commercially Available Exoskeletons in the Automotive Industry: An Electromyographic Pilot Study. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006; Volume 2020, pp. 246–251. [Google Scholar]
- De Bock, S.; Ghillebert, J.; Govaerts, R.; Elprama, S.A.; Marusic, U.; Serrien, B.; Jacobs, A.; Geeroms, J.; Meeusen, R.; De Pauw, K. Passive Shoulder Exoskeletons: More Effective in the Lab Than in the Field? IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 173–183. [Google Scholar] [CrossRef]
- Pacifico, I.; Parri, A.; Taglione, S.; Sabatini, A.M.; Violante, F.S.; Molteni, F.; Giovacchini, F.; Vitiello, N.; Crea, S. Exoskeletons for Workers: A Case Series Study in an Enclosures Production Line. Appl. Ergon. 2022, 101, 103679. [Google Scholar] [CrossRef]
- Kim, S.; Nussbaum, M.A.; Smets, M.; Ranganathan, S. Effects of an Arm-Support Exoskeleton on Perceived Work Intensity and Musculoskeletal Discomfort: An 18-Month Field Study in Automotive Assembly. Am. J. Ind. Med. 2021, 64, 905–914. [Google Scholar] [CrossRef] [PubMed]
- Smets, M. A Field Evaluation of Arm-Support Exoskeletons for Overhead Work in Automotive Assembly. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 192–198. [Google Scholar] [CrossRef]
- Kim, S.; Nussbaum, M.A.; Esfahani, M.I.M.; Alemi, M.M.; Alabdulkarim, S.; Rashedi, E. Assessing the Influence of a Passive, Upper Extremity Exoskeletal Vest for Tasks Requiring Arm Elevation: Part I—“Expected” Effects on Discomfort, Shoulder Muscle Activity, and Work Task Performance. Appl. Ergon. 2018, 70, 315–322. [Google Scholar] [CrossRef]
- Alabdulkarim, S.; Kim, S.; Nussbaum, M.A. Effects of Exoskeleton Design and Precision Requirements on Physical Demands and Quality in a Simulated Overhead Drilling Task. Appl. Ergon. 2019, 80, 136–145. [Google Scholar] [CrossRef] [PubMed]
- Jorgensen, M.J.; Hakansson, N.A.; Desai, J. The Impact of Passive Shoulder Exoskeletons during Simulated Aircraft Manufacturing Sealing Tasks. Int. J. Ind. Ergon. 2022, 91, 103337. [Google Scholar] [CrossRef]
- Jorgensen, M.J.; Hakansson, N.A.; Desai, J. Influence of Different Passive Shoulder Exoskeletons on Shoulder and Torso Muscle Activation during Simulated Horizontal and Vertical Aircraft Squeeze Riveting Tasks. Appl. Ergon. 2022, 104, 103822. [Google Scholar] [CrossRef]
- Hefferle, M.; Snell, M.; Kluth, K. Influence of Two Industrial Overhead Exoskeletons on Perceived Strain—A Field Study in the Automotive Industry. In Proceedings of the AHFE 2020 Virtual Conference on Human Factors in Robots, Drones and Unmanned Systems, Virtual, 16–20 July 2020; Volume 1210, ISBN 9783030517571. [Google Scholar]
- Moyon, A.; Poirson, E.; Petiot, J.-F. Experimental Study of the Physical Impact of a Passive Exoskeleton on Manual Sanding Operations. Procedia CIRP 2018, 70, 284–289. [Google Scholar] [CrossRef]
- Hyun, D.J.; Bae, K.H.; Kim, K.J.; Nam, S.; Lee, D.H. A Light-Weight Passive Upper Arm Assistive Exoskeleton Based on Multi-Linkage Spring-Energy Dissipation Mechanism for Overhead Tasks. Rob. Auton. Syst. 2019, 122, 103309. [Google Scholar] [CrossRef]
- Spada, S.; Ghibaudo, L.; Carnazzo, C.; Gastaldi, L.; Cavatorta, M.P. Passive Upper Limb Exoskeletons: An Experimental Campaign with Workers. In Proceedings of the 20th Congress of the International Ergonomics Association, Florence, Italy, 26–30 August 2018; Volume 825, ISBN 9783319960678. [Google Scholar]
- Latella, C.; Tirupachuri, Y.; Tagliapietra, L.; Rapetti, L.; Schirrmeister, B.; Bornmann, J.; Gorjan, D.; Camernik, J.; Maurice, P.; Fritzsche, L.; et al. Analysis of Human Whole-Body Joint Torques During Overhead Work with a Passive Exoskeleton. IEEE Trans. Hum. Mach. Syst. 2021, 52, 1060–1068. [Google Scholar] [CrossRef]
- Theurel, J.; Desbrosses, K.; Roux, T.; Savescu, A. Physiological Consequences of Using an Upper Limb Exoskeleton during Manual Handling Tasks. Appl. Ergon. 2018, 67, 211–217. [Google Scholar] [CrossRef] [PubMed]
- Luger, T.; Seibt, R.; Cobb, T.J.; Rieger, M.A.; Steinhilber, B. Influence of a Passive Lower-Limb Exoskeleton during Simulated Industrial Work Tasks on Physical Load, Upper Body Posture, Postural Control and Discomfort. Appl. Ergon. 2019, 80, 152–160. [Google Scholar] [CrossRef]
- Luger, T.; Cobb, T.J.; Seibt, R.; Rieger, M.A.; Steinhilber, B. Subjective Evaluation of a Passive Lower-Limb Industrial Exoskeleton During Simulated Assembly. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 175–184. [Google Scholar] [CrossRef]
- Groos, S.; Fuchs, M.; Kluth, K. Determination of the Subjective Strain Experiences During Assembly Using the Exoskeleton “Chairless Chair”. In Proceedings of the Advances in Human Factors in Robots and Unmanned Systems, Washington, DC, USA, 24–28 July 2019; Chen, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2020; Volume 962, pp. 72–82. [Google Scholar]
- Spada, S.; Ghibaudo, L.; Carnazzo, C.; Di Pardo, M.; Chander, D.S.; Gastaldi, L.; Cavatorta, M.P. Physical and Virtual Assessment of a Passive Exoskeleton. In Proceedings of the 20th Congress of the International Ergonomics Association, Florence, Italy, 26–30 August 2018; Volume 825, ISBN 9783319960678. [Google Scholar]
- Pillai, M.V.; Van Engelhoven, L.; Kazerooni, H. Evaluation of a Lower Leg Support Exoskeleton on Floor and Below Hip Height Panel Work. Hum. Factors 2020, 62, 489–500. [Google Scholar] [CrossRef] [PubMed]
- Chae, U.R.; Kim, K.; Choi, J.; Hyun, D.J.; Yun, J.; Lee, G.H.; Hyun, Y.G.; Lee, J.; Chung, M. Systematic Usability Evaluation on Two Harnesses for a Wearable Chairless Exoskeleton. Int. J. Ind. Ergon. 2021, 84, 103162. [Google Scholar] [CrossRef]
- Yan, Z.; Han, B.; Du, Z.; Huang, T.; Bai, O.; Peng, A. Development and Testing of a Wearable Passive Lower-Limb Support Exoskeleton to Support Industrial Workers. Biocybern. Biomed. Eng. 2021, 41, 221–238. [Google Scholar] [CrossRef]
- Tompkins, J. Facilities Planning; John Wiley & Sons: Chichester, UK, 2003; 750p. [Google Scholar]
- Todorovic, O.; Constantinescu, C.; Popescu, D. Foundations for economic evaluation of exoskeletons in manufacturing. Acta Tech. Napoc. Ser.-Appl. Math. Mech. Eng. 2018, 61, 221–230. [Google Scholar]
- Hein, C.M.; Lueth, T.C. User Acceptance Evaluation of Wearable Aids. In Developing Support Technologies; Springer: Berlin/Heidelberg, Germany, 2018; Volume 23. [Google Scholar]
- Ralfs, L.; Hoffmann, N.; Weidner, R. Approach of a Decision Support Matrix for the Implementation of Exoskeletons in Industrial Workplaces. In Annals of Scientific Society for Assembly, Handling and Industrial Robotics 2021; Schüppstuhl, T., Tracht, K., Raatz, A., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 165–176. [Google Scholar]
- De Looze, M.; de Vries, A.; Krause, F.; Baltrusch, S. Three-Stage Evaluation for Defining the Potential of an Industrial Exoskeleton in a Specific Job. In Proceedings of the 21st Congress of the International Ergonomics Association (IEA 2021), Online, 13–18 June 2021; Volume 223, ISBN 9783030746131. [Google Scholar]
- Toxiri, S.; Sposito, M.; Lazzaroni, M.; Mancini, L.; Di Pardo, M.; Caldwell, D.G.; Ortiz, J. Towards Standard Specifications for Back-Support Exoskeletons. In Proceedings of the 4th International Symposium on Wearable Robotics, WeRob2018, Pisa, Italy, 16–20 October 2018; Volume 22. [Google Scholar]
- Bostelman, R.; Li-Baboud, Y.-S.; Virts, A.; Yoon, S.; Shah, M. Towards Standard Exoskeleton Test Methods for Load Handling. In Proceedings of the 2019 Wearable Robotics Association Conference, WearRAcon 2019, Scottsdale, AZ, USA, 25–27 March 2019; pp. 21–27. [Google Scholar]
- Dahmen, C.; Hölzel, C.; Wöllecke, F.; Constantinescu, C. Approach of Optimized Planning Process for Exoskeleton Centered Workplace Design. Procedia CIRP 2018, 67, 268–273. [Google Scholar] [CrossRef]
- Dahmen, C.; Wöllecke, F.; Constantinescu, C. Challenges and Possible Solutions for Enhancing the Workplaces of the Future by Integrating Smart and Adaptive Exoskeletons. Procedia CIRP 2018, 67, 268–273. [Google Scholar] [CrossRef]
- Dahmen, C.; Constantinescu, C. Methodology of Employing Exoskeleton Technology in Manufacturing by Considering Time-Related and Ergonomics Influences. Appl. Sci. 2020, 10, 1591. [Google Scholar] [CrossRef]
- Di Pardo, M.; Monferino, R.; Gallo, F.; Tauro, F. Exoskeletons Introduction in Industry. Methodologies and Experience of Centro Ricerche Fiat (CRF). In Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Online, 13–16 October 2020; Volume 27. [Google Scholar]
- Masood, J.; Dacal-Nieto, A.; Alonso-Ramos, V.; Fontano, M.I.; Voilqué, A.; Bou, J. Industrial Wearable Exoskeletons and Exosuits Assessment Process. In Proceedings of the 4th International Symposium on Wearable Robotics, WeRob2018, Pisa, Italy, 16–20 October 2018; Volume 22. [Google Scholar]
- Grazi, L.; Chen, B.; Lanotte, F.; Vitiello, N.; Crea, S. Towards Methodology and Metrics for Assessing Lumbar Exoskeletons in Industrial Applications. In Proceedings of the 2019 IEEE International Workshop on Metrology for Industry 4.0 and IoT, MetroInd 4.0 and IoT, Naples, Italy, 4–6 June 2019; pp. 400–404. [Google Scholar]
- Hefferle, M.; Lechner, M.; Kluth, K.; Christian, M. Development of a Standardized Ergonomic Assessment Methodology for Exoskeletons Using Both Subjective and Objective Measurement Techniques. In Proceedings of the AHFE 2019 International Conference on Human Factors in Robots and Unmanned Systems, Washington, DC, USA, 24–28 July 2019; Volume 962, ISBN 9783030204662. [Google Scholar]
- Constantinescu, C.; Todorovic, O.; Ippolito, D. Comprehensive Modelling and Simulation towards the Identification of Critical Parameters for Evaluation of Exoskeleton-Centred Workplaces. Procedia CIRP 2019, 79, 176–179. [Google Scholar] [CrossRef]
- Ippolito, D.; Constantinescu, C.; Riedel, O. Holistic Planning and Optimization of Human-Centred Workplaces with Integrated Exoskeleton Technology. Procedia CIRP 2020, 88, 214–217. [Google Scholar] [CrossRef]
- Hartmann, V.N.; Rinaldi, D.M.; Taira, C.; Forner-Cordero, A. Industrial Upper-Limb Exoskeleton Characterization: Paving the Way to New Standards for Benchmarking. Machines 2021, 9, 362. [Google Scholar] [CrossRef]
- Zelik, K.E.; Nurse, C.A.; Schall, M.C.; Sesek, R.F.; Marino, M.C.; Gallagher, S. An Ergonomic Assessment Tool for Evaluating the Effect of Back Exoskeletons on Injury Risk. Appl. Ergon. 2022, 99, 103619. [Google Scholar] [CrossRef]
- Chini, G.; Di Natali, C.; Toxiri, S.; Draicchio, F.; Monica, L.; Caldwell, D.G.; Ortiz, J. Preliminary Study of an Exoskeleton Index for Ergonomic Assessment in the Workplace. In Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Online, 13–16 October 2020; Volume 27. [Google Scholar]
- Ralfs, L.; Hoffmann, N.; Weidner, R. Method and Test Course for the Evaluation of Industrial Exoskeletons. Appl. Sci. 2021, 11, 9614. [Google Scholar] [CrossRef]
- Weckenborg, C.; Thies, C.; Spengler, T.S. Harmonizing Ergonomics and Economics of Assembly Lines Using Robots and Exoskeletons. J. Manuf. Syst. 2022, 62, 681–702. [Google Scholar] [CrossRef]
- Schwerha, D.; McNamara, N.; Kim, S.; Nussbaum, M.A. Exploratory Field Testing of Passive Exoskeletons in Several Environments: Perceived Usability and User Acceptance. IISE Trans. Occup. Ergon. Hum. Factors 2022, 10, 71–82. [Google Scholar] [CrossRef]
- Constantinescu, C.; Popescu, D.; Muresan, P.-C.; Stana, S.-I. Exoskeleton-Centered Process Optimization in Advanced Factory Environments. Procedia CIRP 2016, 41, 740–745. [Google Scholar] [CrossRef]
- Constantinescu, C.; Muresan, P.-C.; Simon, G.-M. JackEx: The New Digital Manufacturing Resource for Optimization of Exoskeleton-Based Factory Environments. Procedia CIRP 2016, 50, 508–511. [Google Scholar] [CrossRef]
- Constantinescu, C.; Rus, R.; Rusu, C.-A.; Popescu, D. Digital Twins of Exoskeleton-Centered Workplaces: Challenges and Development Methodology. Proc. Procedia Manuf. 2019, 39, 58–65. [Google Scholar] [CrossRef]
- Rusu, C.-A.; Constantinescu, C.; Marinescu, S.-C. A Generic Hybrid Human/Exoskeleton Digital Model towards Digital Transformation of Exoskeletons-Integrated Workplaces. Procedia CIRP 2021, 104, 1787–1790. [Google Scholar] [CrossRef]
- Rivera, F.G.; Brolin, A.; Luque, E.P.; Högberg, D. A Framework to Model the Use of Exoskeletons in DHM Tools. In Proceedings of the AHFE 2021 Virtual Conferences on Human Factors and Simulation, and Digital Human Modeling and Applied Optimization, Virtual, 25–29 July 2021; Volume 264, ISBN 9783030797621. [Google Scholar]
- Reid, C.R.; Nussbaum, M.A.; Gregorczyk, K.; Harris-Adamson, C.; Kyte, K.; Lowe, B.; Smets, M.; Zmijewski, R. Industrial Exoskeletons: Are We Ready for Prime Time Yet? In Proceedings of the Human Factors and Ergonomics Society, Rome, Italy, 9–13 October 2017; Volume 2017, pp. 1000–1004. [Google Scholar]
- Kim, S.; Moore, A.; Srinivasan, D.; Akanmu, A.; Barr, A.; Harris-Adamson, C.; Rempel, D.M.; Nussbaum, M.A. Potential of Exoskeleton Technologies to Enhance Safety, Health, and Performance in Construction: Industry Perspectives and Future Research. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 185–191. [Google Scholar] [CrossRef]
- Schwerha, D.J.; McNamara, N.; Nussbaum, M.A.; Kim, S. Adoption Potential of Occupational Exoskeletons in Diverse Enterprises Engaged in Manufacturing Tasks. Int. J. Ind. Ergon. 2021, 82, 103103. [Google Scholar] [CrossRef]
- Karvouniari, A.; Michalos, G.; Dimitropoulos, N.; Makris, S. An Approach for Exoskeleton Integration in Manufacturing Lines Using Reality Techniques. In Proceedings of the 6th Cirp Global Web Conference—Envisaging the Future Manufacturing, Design, Technologies and Systems in Innovation Era (CIRPE 2018), Online, 23–25 October 2018; Simeone, A., Priarone, P.C., Eds.; Elsevier: Amsterdam, The Netherlands, 2018; Volume 78, pp. 103–108. Available online: https://www.sciencedirect.com/science/article/pii/S2212827118312289 (accessed on 15 March 2023).
- Elprama, S.A.; Vanderborght, B.; Jacobs, A. An Industrial Exoskeleton User Acceptance Framework Based on a Literature Review of Empirical Studies. Appl. Ergon. 2022, 100, 103615. [Google Scholar] [CrossRef]
- Laevo First PPE Certified Exoskeleton in the World! Meet the Laevo FLEX. 11 April 2022, Laevo News. Available online: https://www.laevo-exoskeletons.com/news/first-ppe-certified-exoskeleton-in-the-world-meet-the-laevo-flex (accessed on 15 March 2023).
- Peters, M.; Wischniewski, S. The Impact of Using Exoskeletons on Occupational Safety and Health; EU-OSHA: Bilbao, Spain, 2019. [Google Scholar]
- Monica, L.; Anastasi, S.; Draicchio, F. Occupational Exoskeletons: Wearable Robotic Devices to Prevent Work-Related Musculoskeletal Disorders in the Workplace of the Future; European Agency for Safety and Health in the Work. Available online: https://osha.europa.eu/en/publications/occupational-exoskeletons-wearable-robotic-devices-and-preventing-work-related (accessed on 9 September 2020).
- Tröster, M.; Budde, S.; Maufroy, C.; Andersen, M.S.; Rasmussen, J.; Schneider, U.; Bauernhansl, T. Biomechanical Analysis of Stoop and Free-Style Squat Lifting and Lowering with a Generic Back-Support Exoskeleton Model. Int. J. Environ. Res. Public Health 2022, 19, 9040. [Google Scholar] [CrossRef] [PubMed]







| Group 1 Appellative Keywords | Group 2 Field Keywords |
|---|---|
| ‘exoskeleton *’ ‘exosuit *’ ‘softsuit *’ | ‘logistic *’ ‘manufacturing’ ‘industr *’ ‘assembly’ ‘production’ ‘warehous *’ ‘pick *’ |
| Body Region Supported by the Exoskeleton | 1. No-Overhead Assembly | 2. Overhead Assembly | 3. Manufacturing | 4. Material Handling | 5. Order Picking | 6. Motion-Related Tasks |
|---|---|---|---|---|---|---|
| Back | 4 | 0 | 1 | 11 | 7 | 2 |
| Upper limb | 2 | 7 | 11 | 4 | 2 | 3 |
| Tool Support | 0 | 0 | 4 | 0 | 0 | 0 |
| Lower limb | 5 | 0 | 1 | 0 | 1 | 1 |
| Type of Task | ||||||
|---|---|---|---|---|---|---|
| Exoskeleton Name | 1. No-Overhead Assembly | 2. Overhead Assembly | 3. Manufacturing | 4. Material Handling | 5. Order Picking | 6. Motion-Related Tasks |
| Laevo | [35,36,37] | [38,39,40,41,42,43] | [44,45,46,47] | |||
| Paexo back | [48] | |||||
| BackX | [37,49] | [50] | ||||
| Flx ergoskeleton | [51,52] | |||||
| V22 | [51] | |||||
| Paexo soft back | [47] | |||||
| Rakunie | [47] | |||||
| Atlas | [47] | |||||
| Flexible prototype beams | [53,54] | |||||
| IPAE | [55] | |||||
| Hero Wear Apex | [56] | |||||
| Levitate | [57,58,59,60,61] | [33,62] | ||||
| ShoulderX | [63,64,65,66,67] | [68] | ||||
| Mate | [69] | [58] | [67] | |||
| Eksovest | [70] | [71] | [72,73,74,75] | |||
| Skelex | [76] | [63,74,75,77] | [68] | |||
| H-VEX | [78] | |||||
| IUVO | [79] | |||||
| Paexo shoulder | [67,74,75] | [80] | ||||
| Crimson Dynamics | [76] | |||||
| Exhauss Stronger | [81] | |||||
| Fawcett + ZeroG | [65,73] | |||||
| Fortis + arm | [65,73] | |||||
| Chairless chair | [82,83,84] | [85] | ||||
| LegX | [86] | |||||
| CEX | [87] | |||||
| Daedalus | [47] | |||||
| Leg prototype | [88] | |||||
| Assessment Methodology | ||||||||
|---|---|---|---|---|---|---|---|---|
| Type of task | EMG | Subjective Evaluation | Heart Rate Evaluation | Oxygen Consumption | Postural Analysis | Range-of-Motion Analysis | Time Performance Measurement | |
| 1. No-overhead assembly | 8 | 11 | 0 | 0 | 3 | 1 | 4 | |
| 2. Overhead assembly | 2 | 7 | 0 | 0 | 1 | 1 | 1 | |
| 3. Manufacturing | 15 | 10 | 1 | 0 | 0 | 0 | 3 | |
| 4. Material Handling | 8 | 9 | 2 | 2 | 6 | 4 | 5 | |
| 5. Order Picking | 3 | 5 | 1 | 0 | 1 | 0 | 0 | |
| 6. Motion-related | 1 | 1 | 0 | 0 | 3 | 1 | 0 | |
| Exoskeleton | Min. Height Size | Max. Heigh Size | Min. Waist Size | Max. Waist Size |
|---|---|---|---|---|
| Laevo (ref. to FLEX version) | 150 | 200 | 34 (hip width) | 43 (hip width) |
| Paexo back | S | XL | Adjustable | Adjustable |
| BackX | 5–95% of human dimensions | |||
| Flx ergoskeleton | 167 | 213 | 68 | 130 |
| V22 | 167 | 213 | 68 | 130 |
| Paexo soft back | NA | NA | 80 | 140 |
| Rakunie | 148 | 195 | 71 | 128 |
| Atlas | 170 | 185 | Adjustable | Adjustable |
| Flexible prototype beams | Adjustable | Adjustable | Adjustable | Adjustable |
| IPAE | Adjustable | Adjustable | Adjustable | Adjustable |
| Hero Wear Apex | 50+ module combination | |||
| Levitate | 157 | 183 | Adjustable | Adjustable |
| ShoulderX | 5–95% of human dimensions | |||
| Mate | 160 | 190 | Adjustable | Adjustable |
| Eksovest | 37 (torso length) | 59 (torso length) | 66 | 118 |
| Skelex (ref. to 1.4.2 version) | 44 (torso length) | 54 (torso length) | 84 | 124 |
| H-VEX | Adjustable | Adjustable | Adjustable | Adjustable |
| IUVO | 160 | 190 | Adjustable | Adjustable |
| Paexo shoulder | 160 | 190 | Adjustable | Adjustable |
| Crimson Dynamics | 165 | 195 | Adjustable | Adjustable |
| Exhauss stronger | Adjustable | Adjustable | S | L |
| RoboMate passive | NF | NF | NF | NF |
| Fawcett + ZeroG | Adjustable | Adjustable | Adjustable | Adjustable |
| Fortis + arm | 162 | 193 | Adjustable | Adjustable |
| Chairless chair | 150 | 200 | Adjustable | Adjustable |
| LegX | Adjustable | Adjustable | Adjustable | Adjustable |
| CEX | 160 | 195 | Adjustable | Adjustable |
| Daedalus | NF | NF | NF | NF |
| Leg prototype | 33 (thigh and leg) | 43 (thigh and leg) | Adjustable | Adjustable |
| Publication | Exoskeleton | Task Type | Findings |
|---|---|---|---|
| [35] | Laevo | Static | Endurance time increased >3×(from 3.2 to 9.7 min) |
| [41] | Laevo | Static | Endurance time increased ≈2× |
| [88] | Leg prototype | Static | Endurance time increased from 2.76 to 13.58 min |
| [62] | Levitate | Static | Endurance time increased 31.6% |
| [57] | Levitate | Static | Endurance time increased 52.5% |
| [79] | IUVO | Static | Endurance time increased 56% |
| [72] | Eksovest | Static | Completion time decreased 18.9% |
| [50] | BackX | Static | Completion time decreased up to 50% |
| [63] | ShoulderX, skelex | Static | Completion time not always decreasing |
| [36] | Laevo | Dynamic | Completion time decreased 15% |
| [49] | BackX | Dynamic | Completion time increased 7.6% for females |
| [52] | Flx Ergoskeleton | Dynamic | Completion time increased 20% |
| [39] | Laevo | Dynamic | Completion time increased 8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ashta, G.; Finco, S.; Battini, D.; Persona, A. Passive Exoskeletons to Enhance Workforce Sustainability: Literature Review and Future Research Agenda. Sustainability 2023, 15, 7339. https://doi.org/10.3390/su15097339
Ashta G, Finco S, Battini D, Persona A. Passive Exoskeletons to Enhance Workforce Sustainability: Literature Review and Future Research Agenda. Sustainability. 2023; 15(9):7339. https://doi.org/10.3390/su15097339
Chicago/Turabian StyleAshta, Gjulio, Serena Finco, Daria Battini, and Alessandro Persona. 2023. "Passive Exoskeletons to Enhance Workforce Sustainability: Literature Review and Future Research Agenda" Sustainability 15, no. 9: 7339. https://doi.org/10.3390/su15097339
APA StyleAshta, G., Finco, S., Battini, D., & Persona, A. (2023). Passive Exoskeletons to Enhance Workforce Sustainability: Literature Review and Future Research Agenda. Sustainability, 15(9), 7339. https://doi.org/10.3390/su15097339