
Evaluation of Elastic Filament Velocimetry (EFV) Sensor in Ventilation Systems: An Experimental Study

Abstract
1. Introduction
2. Materials and Methods
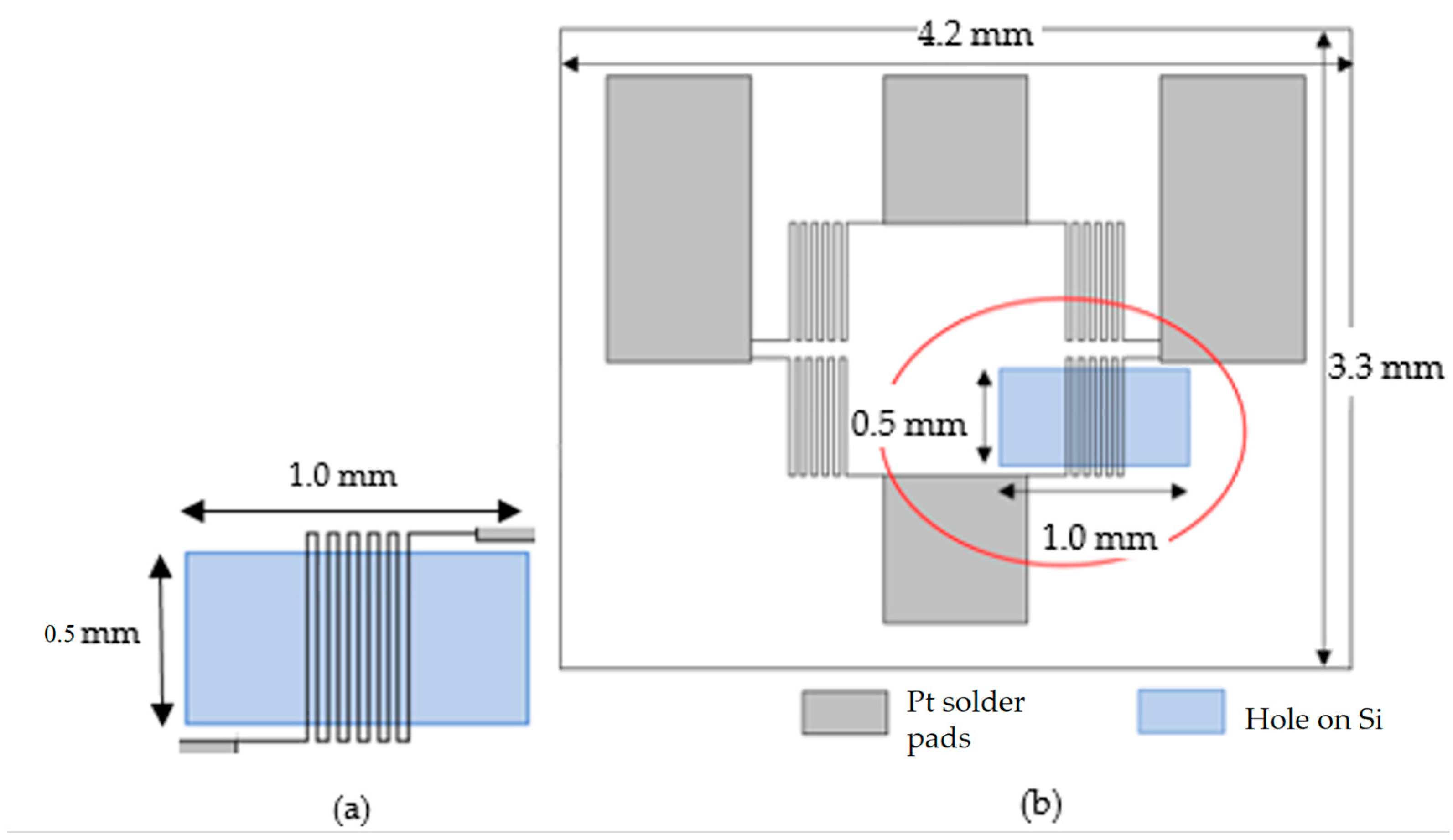
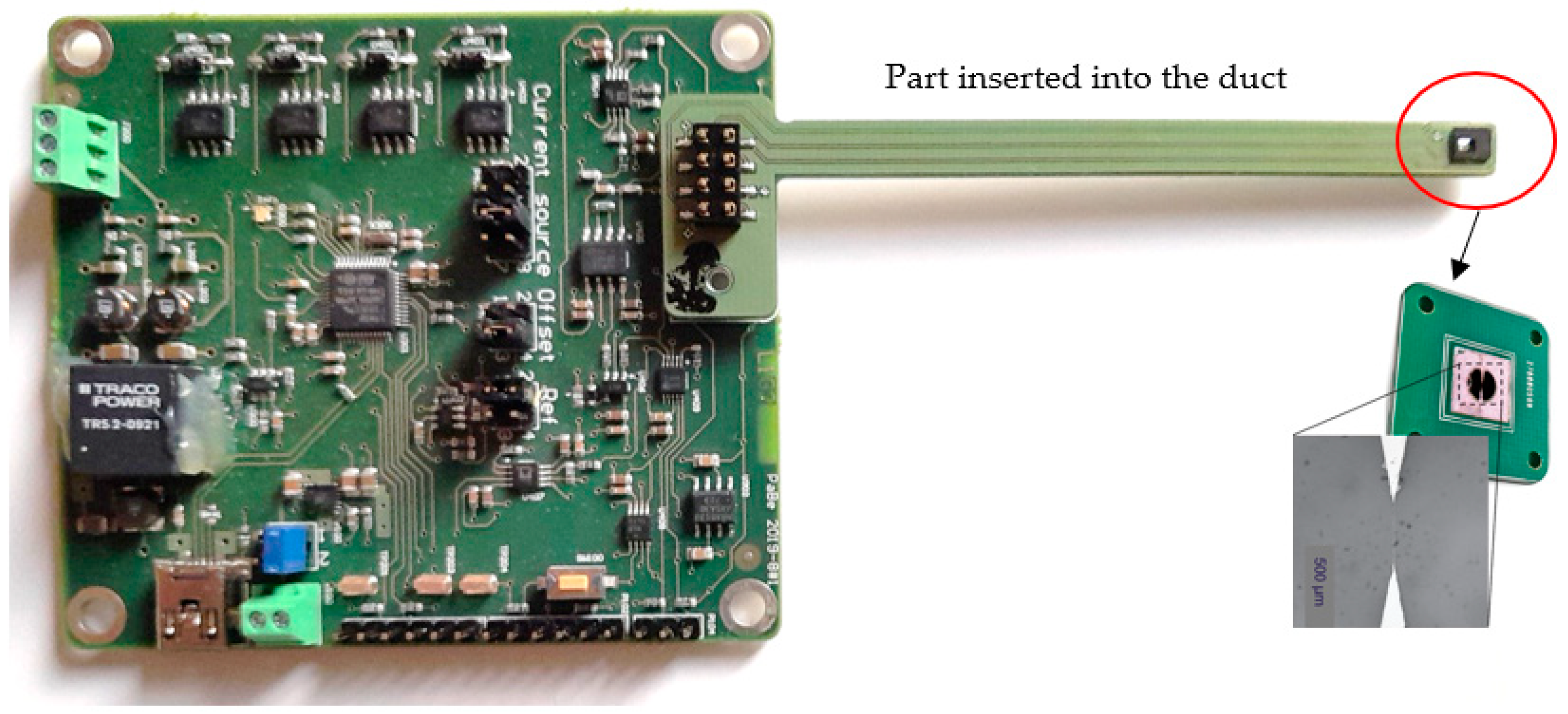
2.1. EFV Sensor
2.2. Laboratory Studies
2.2.1. EFV Sensor Characterization
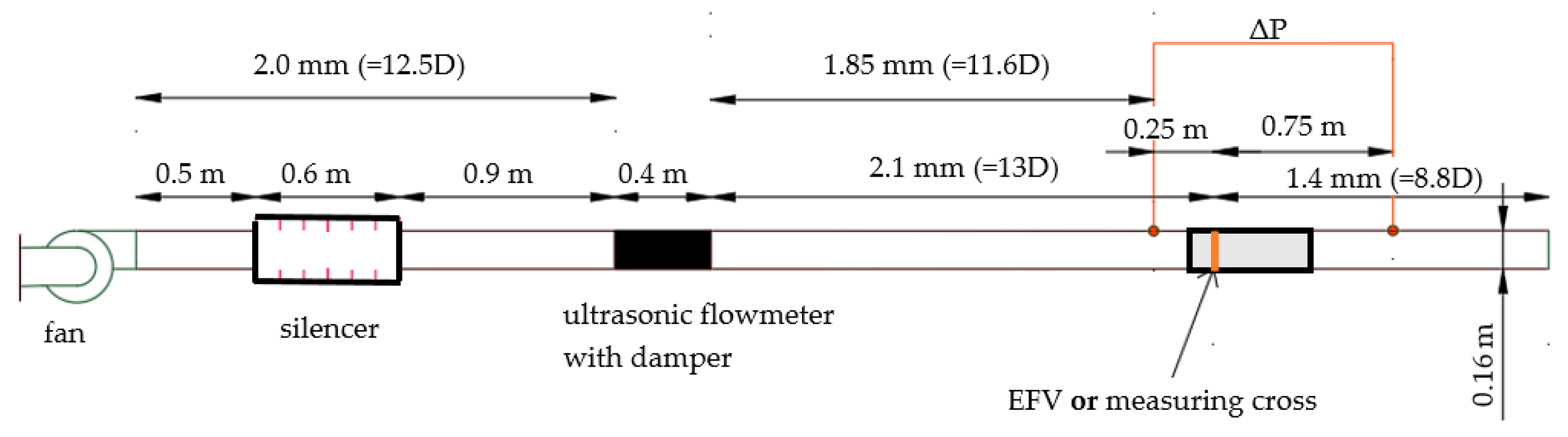
2.2.2. Airflow Disturbance Studies
3. Results and Discussion
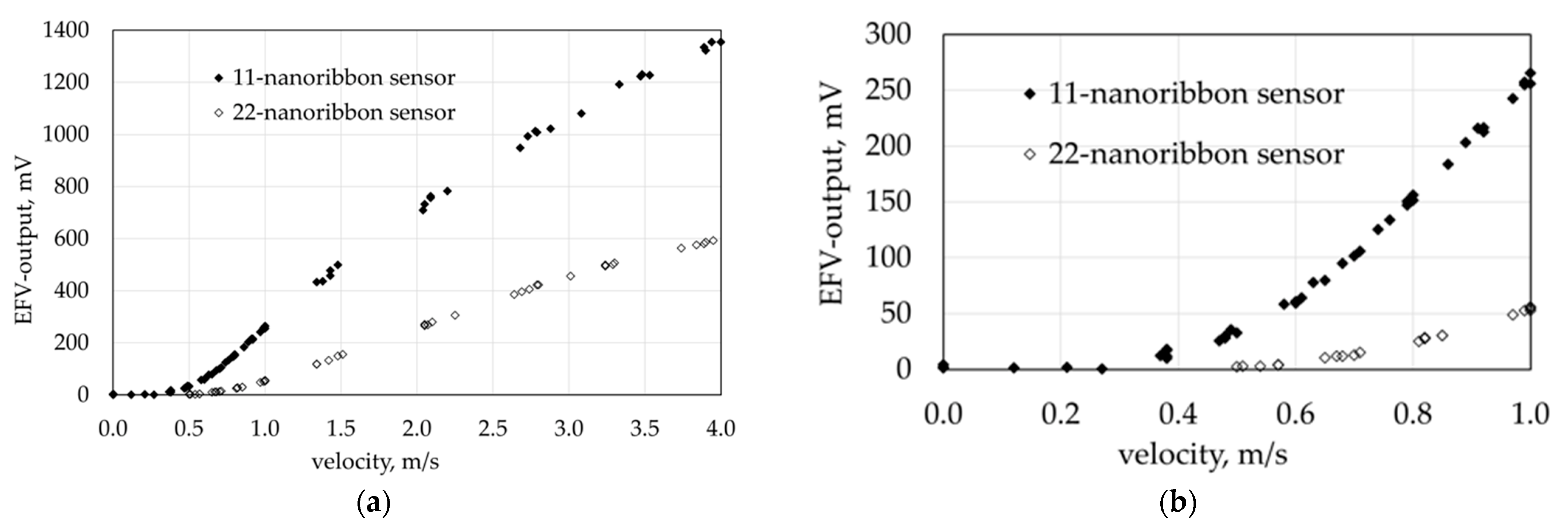
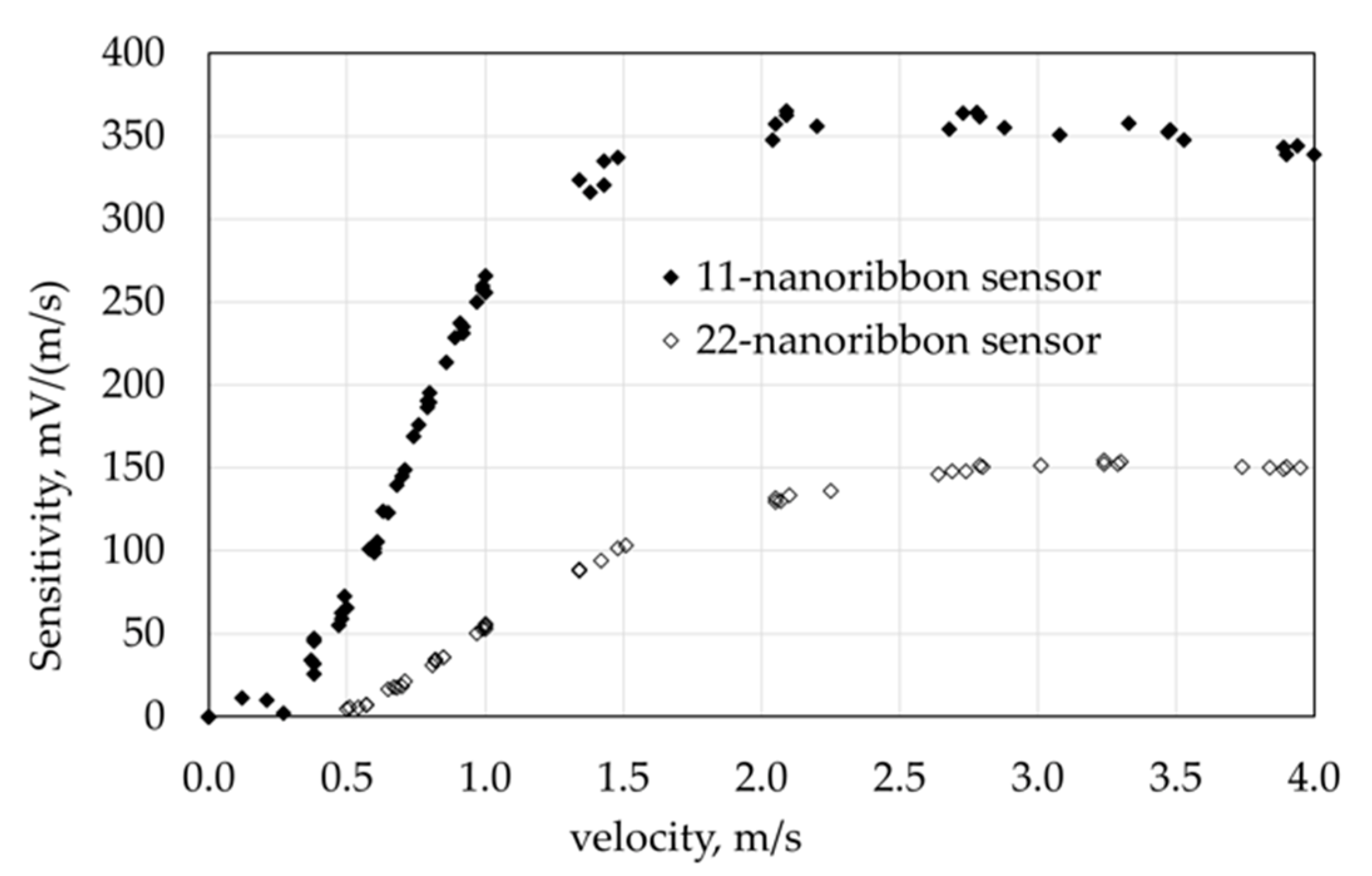
3.1. EFV Sensor Response to Air Velocity
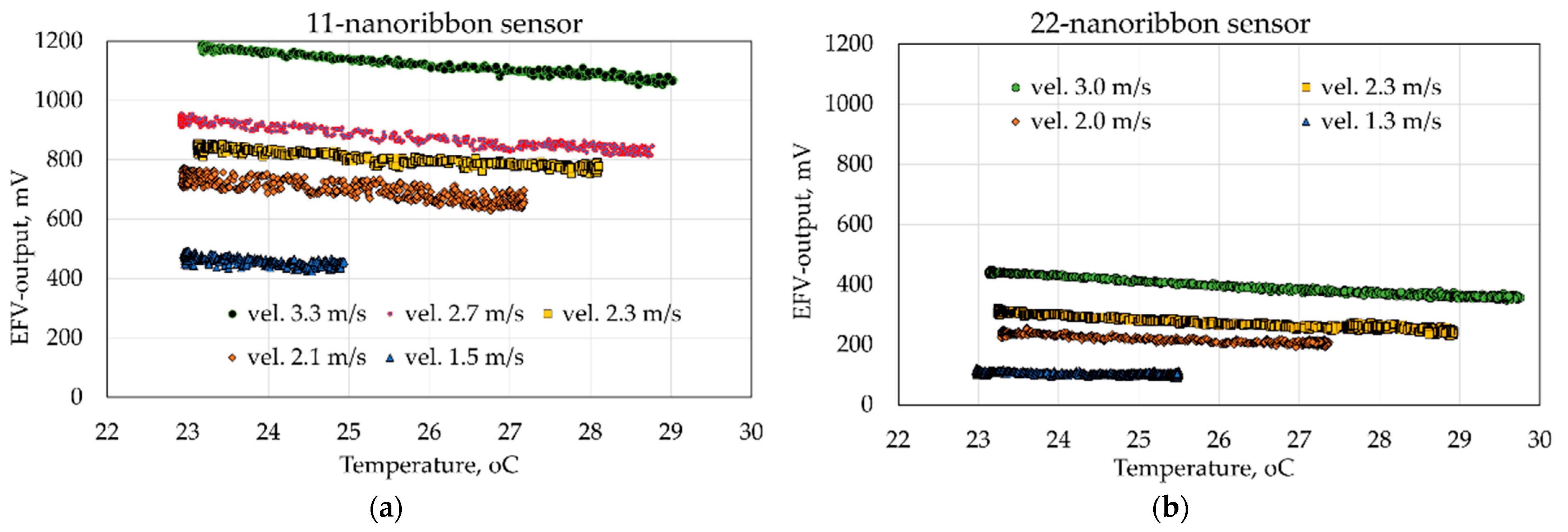
3.2. EFV Sensor Response to Temperature
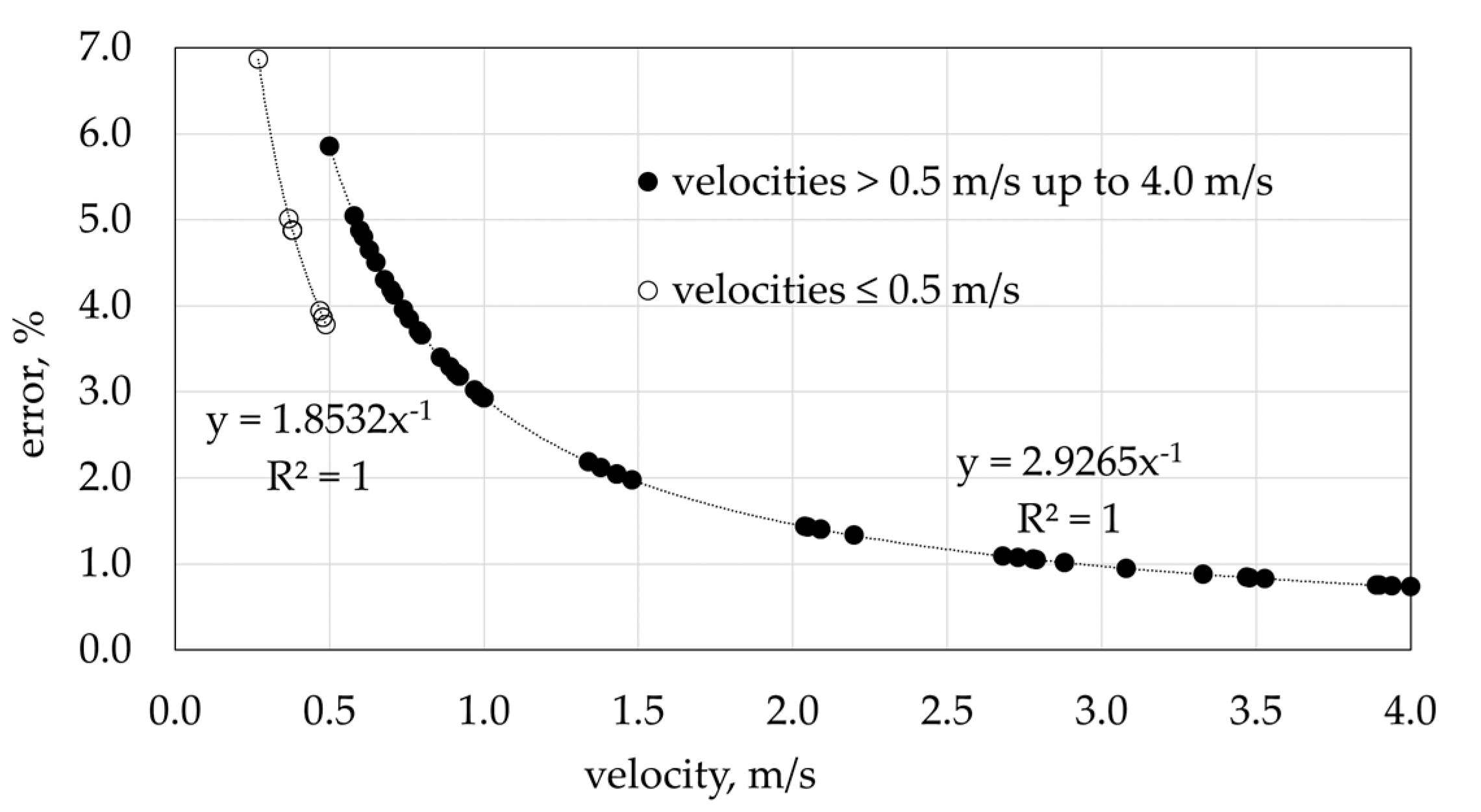
3.3. Development of Calibration Models
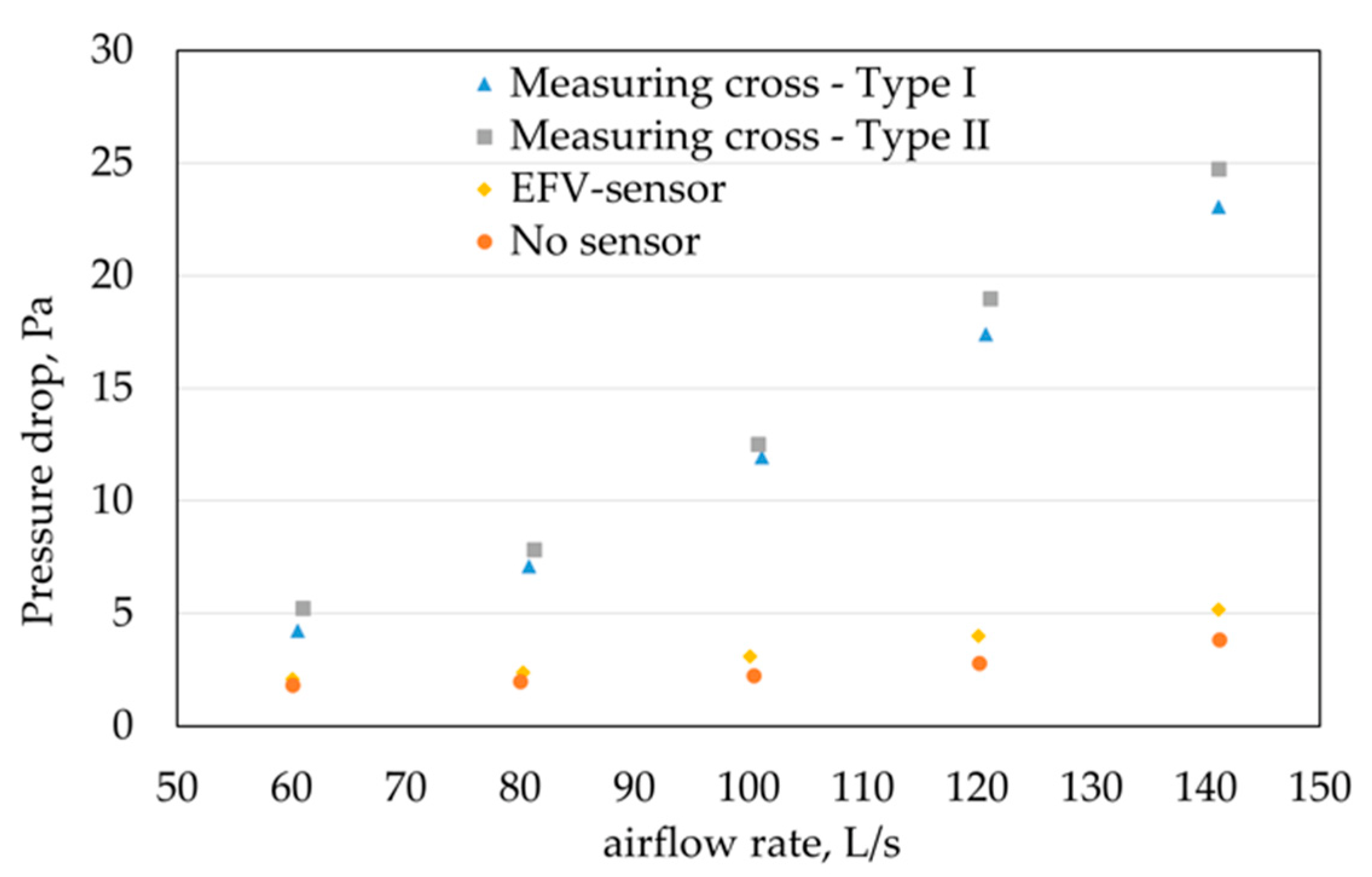
3.4. Airflow Disturbance in Duct Due to the EFV Sensor
3.5. Comparison between EFV Sensor and Ultrasonic Flowmeters and APTs
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wouters, P.; Delmotte, C.; Faÿsse, J.-C.; Barles, P.; Bulsing, P.; Filleux, C.; Hardegger, P.; Blomsterberg, Å.; Pennycook, K.; Jackman, P.; et al. Towards Improved Performances of Mechanical Ventilation Systems; Tip-Vent Project. EC Joule; ALDES Aeraulique S.A.: Vénissieux, France, 2001. [Google Scholar]
- Ren, C.; Cao, S.-J. Development and application of linear ventilation and temperature models for indoor environmental prediction and HVAC systems control. Sustain. Cities Soc. 2019, 51, 101673. [Google Scholar] [CrossRef]
- Markusson, C. Efficiency of Building Related Pump and Fan Operation: Application and System Solutions. Ph.D. Thesis, Chalmers University of Technology, Göteborg, Sweden, 2011. Available online: https://publications.lib.chalmers.se/records/fulltext/146513.pdf (accessed on 12 May 2022).
- Terkildsen, S. Development of Mechanical Ventilation System with Low Energy Consumption for Renovation of Buildings. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2013. Available online: http://orbit.dtu.dk/en/publications/development-of-mechanical-ventilation-system-with-low-energy-consumption-for-renovation-of-buildings(17b183b1-e48c-4ebe-880a-af3e0f4c6906).html (accessed on 12 May 2022).
- Gunner, A.; Afshari, A.; Bergsøe, N.C.; Vorre, A.; Hultmark, G. Energy savings and manifold supply ventilation systems. J. Build. Eng. 2016, 7, 71–77. [Google Scholar] [CrossRef]
- Rahnama, S.; Afshari, A.; Bergsøe, N.C.; Sadrizadeh, S. Experimental study of the pressure reset control strategy for energy-efficient fan operation: Part 1: Variable air volume ventilation system with dampers. Energy Build. 2017, 139, 72–77. [Google Scholar] [CrossRef]
- Dexter, A.; Pakanen, J. Demonstrating Automated Fault Detection and Diagnosis Methods in Real Buildings: International Energy Agency. Energy Conservation in Buildings and Community Systems ANNEX 34; VTT Technical Research Center of Finland: Espoo, Finland, 2001; Available online: https://publications.vtt.fi/pdf/symposiums/2001/S217.pdf (accessed on 15 May 2022).
- Yu, Y.; Woradechjumroen, D.; Yu, D. A review of fault detection and diagnosis methodologies on air-handling units. Energy Build. 2014, 82, 550–562. [Google Scholar] [CrossRef]
- Cory, W. Fans and Ventilation: A Practical Guide; Elsevier Science: Oxford, UK, 2005. [Google Scholar] [CrossRef]
- Liu, R.; Wen, J.; Zhou, X.; Klaassen, C. Stability and accuracy of variable air volume box control at low flows. Part 1: Laboratory test setup and variable air volume sensor test. HVAC R Res. 2014, 20, 3–18. [Google Scholar] [CrossRef]
- Klaczek, W.; Ackerman, M.; Fleming, P.H.; Fleck, B. VAV airflow sensor response in relation to ‘poor’ upstream duct geometry. ASHRAE Trans. 2006, 112 Pt 1, 202–213. [Google Scholar]
- Seshadri, V.; Gandhi, B.K.; Singh, S.N.; Pandey, R.K. Analysis of the effect of body shape on annubar factor using CFD. Measurement 2004, 35, 25–32. [Google Scholar] [CrossRef]
- Wecel, D.; Chmielniak, T.; Kotowicz, J. Experimental and numerical investigations of the averaging Pitot tube and analysis of installation effects on the flow coefficient. Flow Meas. And. Instrum. 2008, 19, 301–306. [Google Scholar] [CrossRef]
- Kabaciński, M.; Pospolita, J. Experimental research into a new design of flow-averaging tube. Flow Meas. Instrum. 2011, 22, 421–427. [Google Scholar] [CrossRef]
- Sanderson, M.L.; Yeung, H. Guidelines for the use of ultrasonic non-invasive metering techniques. Flow Meas. Instrum. 2002, 13, 125–142. [Google Scholar] [CrossRef]
- Mahadeva, D.V.; Baker, R.C.; Woodhouse, J. Studies of the Accuracy of Clamp-on Transit Time Ultrasonic Flowmeters. In Proceedings of the 2008 IEEE Instrumentation and Measurement Technology Conference, Victoria, BC, Canada, 12–15 May 2008. [Google Scholar] [CrossRef]
- Mahadeva, D.V.; Baker, R.C.; Woodhouse, J. Further Studies of the Accuracy of Clamp-on Transit-Time Ultrasonic Flowmeters for Liquids. IEEE Trans. Instrum. Meas. 2009, 58, 1602–1609. [Google Scholar] [CrossRef]
- Rajita, G.; Mandal, N. Review on transit time ultrasonic flowmeter. In Proceedings of the 2016 2nd International Conference on Control, Instrumentation, Energy and Communication (CIEC), Kolkata, India, 28–30 January 2016. [Google Scholar] [CrossRef]
- Wang, X.F.; Tang, Z.A. Note: Ultrasonic gas flowmeter based on optimized time-of-flight algorithms. Rev. Sci. Instrum. 2011, 82, 46109. [Google Scholar] [CrossRef]
- Iooss, B.; Lhuillier, C.; Jeanneau, H. Numerical simulation of transit-time ultrasonic flowmeters: Uncertainties due to flow profile and fluid turbulence. Ultrasonics 2002, 40, 1009–1015. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.-G.; Du, G.-S.; Shao, Z.-F.; He, Q.-R.; Zhou, C.-L. Measurement of transitional flow in pipes using ultrasonic flowmeters. Fluid Dyn. Res. 2014, 46, 55501. [Google Scholar] [CrossRef]
- Zhang, H.; Guo, C.; Lin, J. Effects of Velocity Profiles on Measuring Accuracy of Transit-Time Ultrasonic Flowmeter. Appl. Sci. 2019, 9, 1648. Available online: https://www.mdpi.com/2076-3417/9/8/1648 (accessed on 2 May 2022). [CrossRef]
- Shikida, M.; Yoshikawa, K.; Iwai, S.; Sato, K. Flexible flow sensor for large-scale air-conditioning network systems. Sens. Actuators A Phys. 2012, 188, 2–8. [Google Scholar] [CrossRef]
- Shikida, M.; Yamazaki, Y.; Yoshikawa, K.; Sato, K. A MEMS flow sensor applied in a variable-air-volume unit in a building air-conditioning system. Sens. Actuators A Phys. 2013, 189, 212–217. [Google Scholar] [CrossRef]
- Glatzl, T.; Cerimovic, S.; Steiner, H.; Talic, A.; Beigelbeck, R.; Jachimowicz, A.; Sauter, T.; Keplinger, F. Hot-film and calorimetric thermal air flow sensors realized with printed board technology. J. Sens. Sens. Syst. 2016, 5, 283–291. [Google Scholar] [CrossRef]
- Xu, W.; Wang, X.; Wang, R.; Izhar; Xu, J.; Lee, Y.-K. CMOS MEMS Thermal Flow Sensor with Enhanced Sensitivity for Heating, Ventilation, and Air Conditioning Application. IEEE Trans. Ind. Electron. 2021, 68, 4468–4476. [Google Scholar] [CrossRef]
- Ejeian, F.; Azadi, S.; Razmjou, A.; Orooji, Y.; Kottapalli, A.; Warkiani, M.E.; Asadnia, M. Design and applications of MEMS flow sensors: A review. Sens. Actuators A Phys. 2019, 295, 483–502. [Google Scholar] [CrossRef]
- Fu, M.K.; Fan, Y.; Byers, C.P.; Chen, T.-H.; Arnold, C.B.; Hultmark, M. Elastic filament velocimetry (EFV). Meas. Sci. Technol. 2017, 28, 025301. [Google Scholar] [CrossRef]
- Byers, C.P.; Fu, M.K.; Fan, Y.; Kokmanian, K.; Hultmark, M. Advancements in measuring the wall-normal velocity fluctuations in a turbulent boundary layer. In Proceedings of the 10th International Symposium on Turbulence and Shear Flow Phenomena (TSFP), Chicago, IL, USA, 6–9 July 2017. [Google Scholar]
- Byers, C.P.; Fu, M.K.; Fan, Y.; Hultmark, M. Development of instrumentation for measurements of two components of velocity with a single sensing element. Meas. Sci. Technol. 2018, 29, 025304. [Google Scholar] [CrossRef]
- Joint Committee for Guides in Metrology. JCGM 100: Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement; JCGM: Sèvres, France, 2008. [Google Scholar]
- Furness Control, Low Pressure Microprocessor Micromanometer FC0510. Available online: https://www.bissistem.com/furness/files/FCO510-Laboratuvar-Tipi-Akis-Olcer.pdf (accessed on 15 June 2022).
- Mensor, Operation Manual, Digital Pressure Gauge, Series 2100. Available online: https://fr.shop.wika.com/upload/DPG2100_31281.pdf (accessed on 15 June 2022).
- Lindab, Lindab Ultralink Controller FTCU. Available online: https://itsolution.lindab.com/LindabWebProductsDoc/PDF/Documentation/ADS/DK/Technical/Technical-FTCU.pdf (accessed on 15 June 2022).
- Testo, Testo 480 Digital Temperature, Humidity and Air Flow Meter. Available online: https://www.testo.com/en-TH/testo-480/p/0563-4800#tab-technicalData (accessed on 15 June 2022).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FCO510 Micromanometer [32] | |
| Measuring range: | 0 Pa to 200 Pa |
| Accuracy: | ±0.25% of reading value between 20 Pa and 200 Pa |
| Resolution: | 0.001 Pa |
| Mensor Digital pressure gauge [33] | |
| Calibrated range: | 10.8 psia to 16.7 psia |
| Temperature compensated: | 15 °C to 45 °C |
| Accuracy: | ±0.01% of reading value |
| Resolution: | 1 Pa |
| Thin thermocouple (TT) | |
| Accuracy: | ±0.05 °C |
| Resolution: | 0.01 °C |
| UltraLink FTCU [34] | |
| Airflow rate measuring range: | 4 L/s to 302 L/s |
| Airflow rate accuracy: | ±5% of reading value OR±1.6 L/sbased on which of these two values is the greatest |
| Temperature measuring range: | −10 °C to 50 °C |
| Temperature accuracy: | ±1 °C |
| Testo 480 [35] | |
| Measuring range: | −100 hPa to 100 hPa |
| Accuracy: | ±(0.3 Pa + 1% of reading value) |
| Resolution: | 0.1 Pa |
| Airflow Rate, L/s | Temperature, °C | Pressure Drop, Pa | |
|---|---|---|---|
| No sensor | 60.1 ± 4.5 | 26.6 ± 1.5 | 1.8 ± 0.5 |
| 80.0 ± 5.9 | 26.5 ± 1.5 | 2.0 ± 0.5 | |
| 100.4 ± 7.5 | 26.1 ± 1.5 | 2.3 ± 0.5 | |
| 120.1 ± 8.9 | 25.9 ± 1.5 | 2.8 ± 0.5 | |
| 141.2 ± 10.5 | 25.9 ± 1.5 | 3.8 ± 0.5 | |
| EFV-sensor | 60.0 ± 4.5 | 26.7 ± 1.5 | 2.1 ± 0.5 |
| 80.2 ± 6.0 | 26.4 ± 1.5 | 2.4 ± 0.5 | |
| 100.1 ± 7.4 | 26.1 ± 1.5 | 3.1 ± 0.5 | |
| 120.1 ± 8.9 | 25.9 ± 1.5 | 4.0 ± 0.5 | |
| 141.1 ± 10.5 | 25.9 ± 1.5 | 5.2 ± 0.6 | |
| Measuring cross, Type I | 60.5 ± 4.5 | 24.8 ± 1.5 | 4.2 ± 0.6 |
| 80.8 ± 6.0 | 24.3 ± 1.5 | 7.1 ± 0.6 | |
| 101.2 ± 7.5 | 24.1 ± 1.5 | 11.9 ± 0.7 | |
| 120.8 ± 9.0 | 24.0 ± 1.5 | 17.4 ± 0.7 | |
| 141.1 ± 10.5 | 23.9 ± 1.5 | 23.0 ± 0.8 | |
| Measuring cross, Type II | 61.0 ± 4.5 | 23.7 ± 1.5 | 5.2 ± 0.5 |
| 81.2 ± 6.0 | 23.4 ± 1.5 | 7.8 ± 0.6 | |
| 100.8 ± 7.5 | 23.3 ± 1.5 | 12.5 ± 0.7 | |
| 121.1 ± 9.0 | 23.2 ± 1.5 | 19.0 ± 0.8 | |
| 141.1 ± 10.5 | 23.2 ± 1.5 | 24.7 ± 1.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keli, A.; Rahnama, S.; Hultmark, G.; Hultmark, M.; Afshari, A. Evaluation of Elastic Filament Velocimetry (EFV) Sensor in Ventilation Systems: An Experimental Study. Sustainability 2023, 15, 1955. https://doi.org/10.3390/su15031955
Keli A, Rahnama S, Hultmark G, Hultmark M, Afshari A. Evaluation of Elastic Filament Velocimetry (EFV) Sensor in Ventilation Systems: An Experimental Study. Sustainability. 2023; 15(3):1955. https://doi.org/10.3390/su15031955
Chicago/Turabian StyleKeli, Athanasia, Samira Rahnama, Göran Hultmark, Marcus Hultmark, and Alireza Afshari. 2023. "Evaluation of Elastic Filament Velocimetry (EFV) Sensor in Ventilation Systems: An Experimental Study" Sustainability 15, no. 3: 1955. https://doi.org/10.3390/su15031955
APA StyleKeli, A., Rahnama, S., Hultmark, G., Hultmark, M., & Afshari, A. (2023). Evaluation of Elastic Filament Velocimetry (EFV) Sensor in Ventilation Systems: An Experimental Study. Sustainability, 15(3), 1955. https://doi.org/10.3390/su15031955