

Underground Logistics Network Design for Large-Scale Municipal Solid Waste Collection: A Case Study of Nanjing, China



Abstract
:1. Introduction
2. Literature Review
2.1. MSW Underground Collection System
2.2. MSW Collection System Network Planning
3. Prototyping UWCS Network
3.1. UWCS Physical Components
3.1.1. Node Facilities
- (1)
- Underground collection point (UCP)
- (2)
- Concentrated collection point (CCP)
- (3)
- Underground transfer station (UTS)
- (4)
- Processing plants
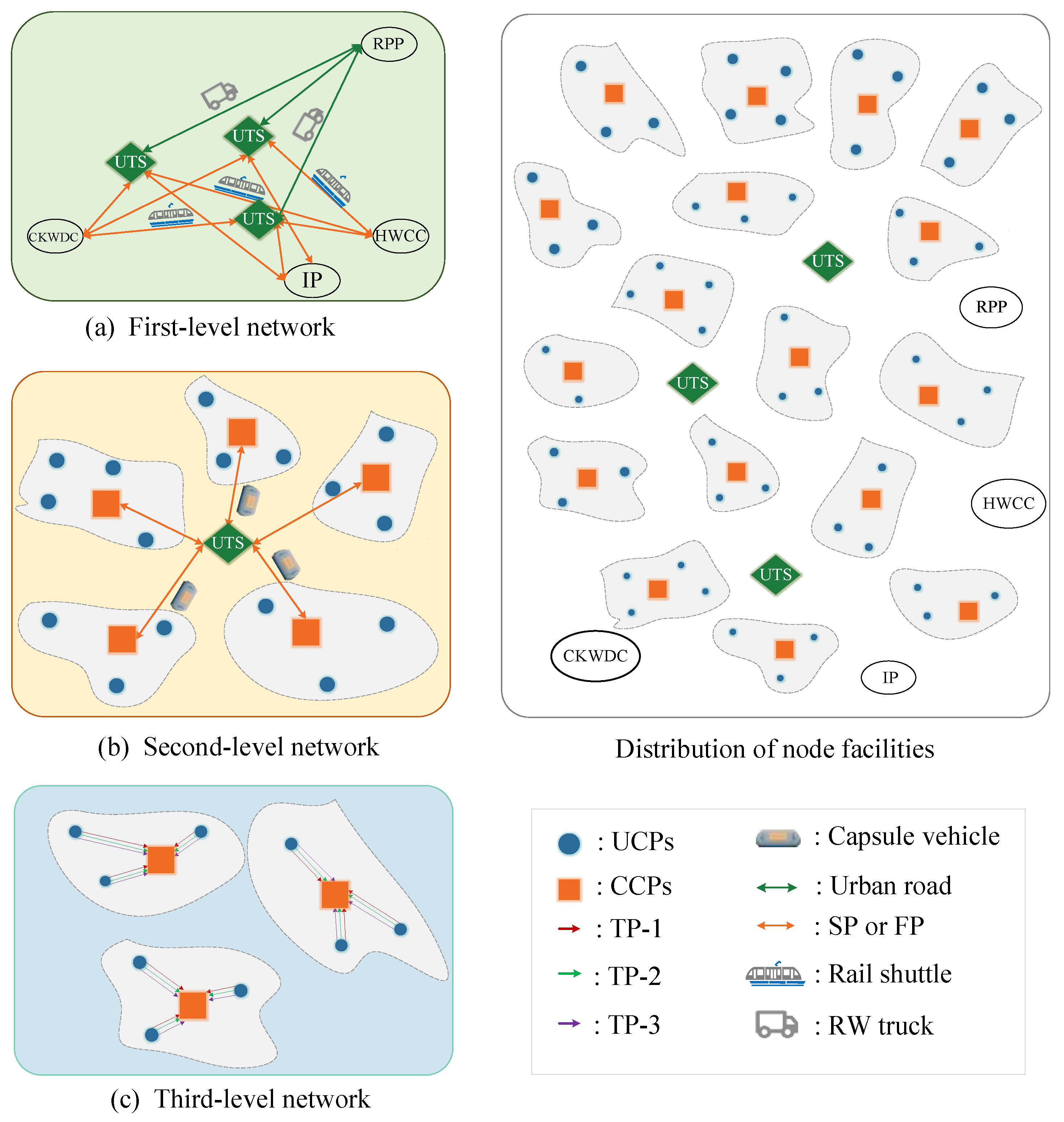
3.1.2. Network Topology
3.2. UWCS Technology Components
3.3. Modeling Boundary and Hypotheses
- (i)
- The amount and location of the waste at each demand point are known, and it remains stable and will not increase or decrease at different times within one year.
- (ii)
- The location of the processing plant is known, the processing capacity meets the needs, and the transportation capacity of FPs is not limited.
- (iii)
- In order to improve transportation efficiency, any two CCPs are not connected to each other, and any two UTSs are not connected to each other. The capacity of each CCP and each UTS is the same.
- (iv)
- The maintenance and installation costs of the pipeline and vehicle purchase costs are calculated into the fixed cost of the pipeline. The transportation cost of pneumatic pipelines is calculated into their fixed cost.
- (v)
- The driving distance between the nodes is straight, and it remains unchanged.
- (vi)
- Assuming that KW pre-processing, RW, OW, and HW collect transportation, it will not damage their quality.
4. Model Development
4.1. E-Topsis for Evaluating the Importance of Demand Points
- (1)
- Demand quantity (DQ). Because the amount of MSW at each demand point will affect the flow of garbage transportation, the candidate locations of nodes at each level should be those with the highest possible generation:where qi is the quantity of MSW generated per day at the demand point i.
- (2)
- Regional accessibility (RA). RA is defined as the convenience of MSW transportation from demand point i to processing plant n [46]. Regionally accessible indicator available time-distance function representation:where tin is the average transport time from the demand point i to the processing plant n, S is the transport distance within the region, and ∈(0, 1) is a time-sensitive factor.
- (3)
- Transportation cost (TC). TC is an important factor affecting the total cost of UWCS network construction. Therefore, the transportation path should be optimized to the maximum extent in the network design to minimize its transportation cost.where Qin is the amount of waste transported from demand point i to the processing plant n for each type of waste, din is the transportation distance from demand point i to the processing plant n, L1, L2, and L3 are the unit transportation costs (determined according to the local level).
4.2. MILP Model
4.2.1. Symbol Definition
4.2.2. Derivation of Objective Functions
4.2.3. Derivation of Constraints
4.2.4. Complexity Analyses
4.3. Quantifying UWCS Benefits
5. Solution Approaches
5.1. GGA
5.2. GVNS
5.2.1. Initial Value and Fitness Function
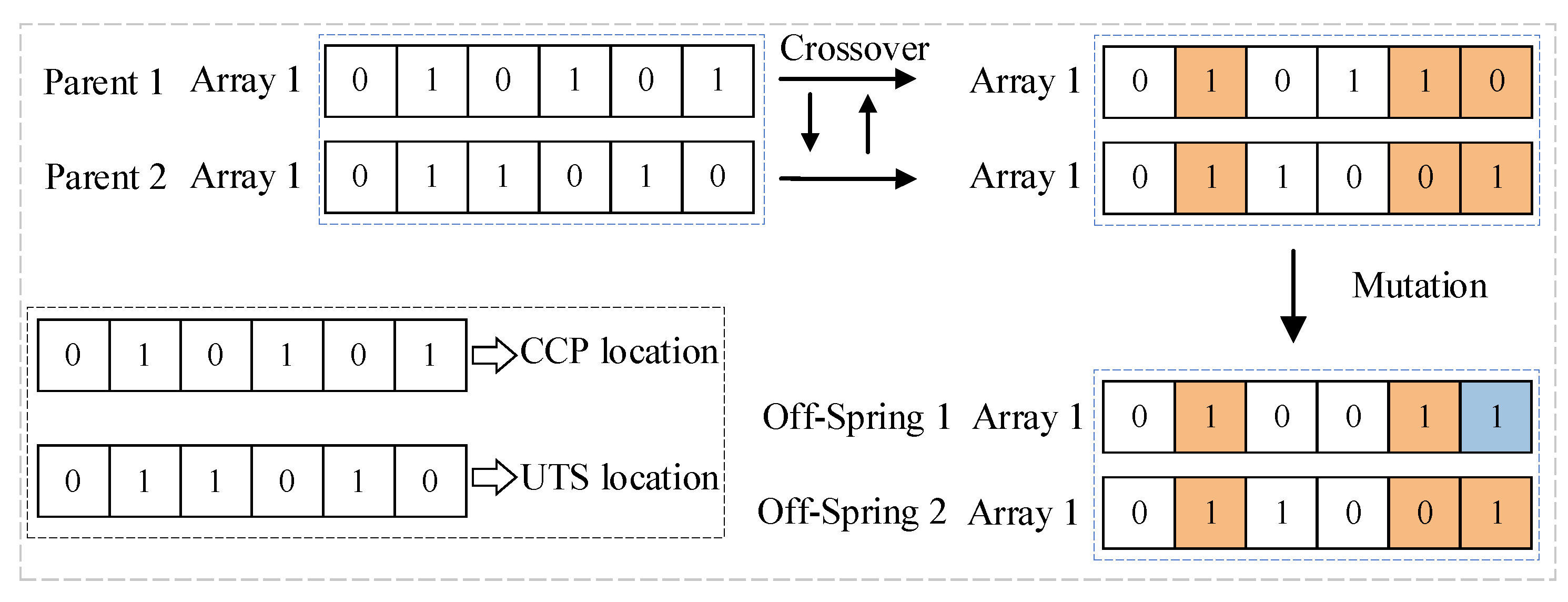
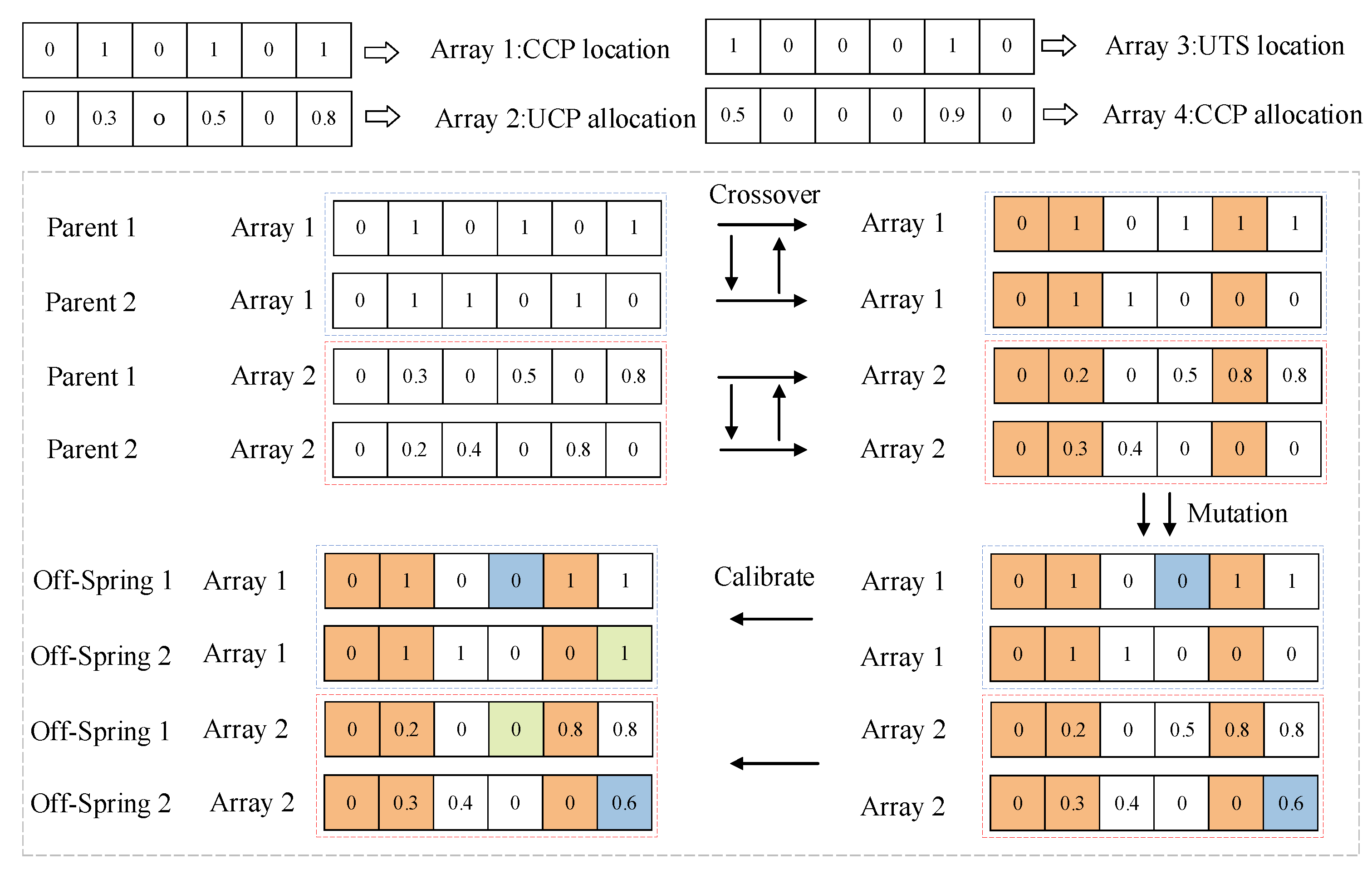
5.2.2. Genetic Operations
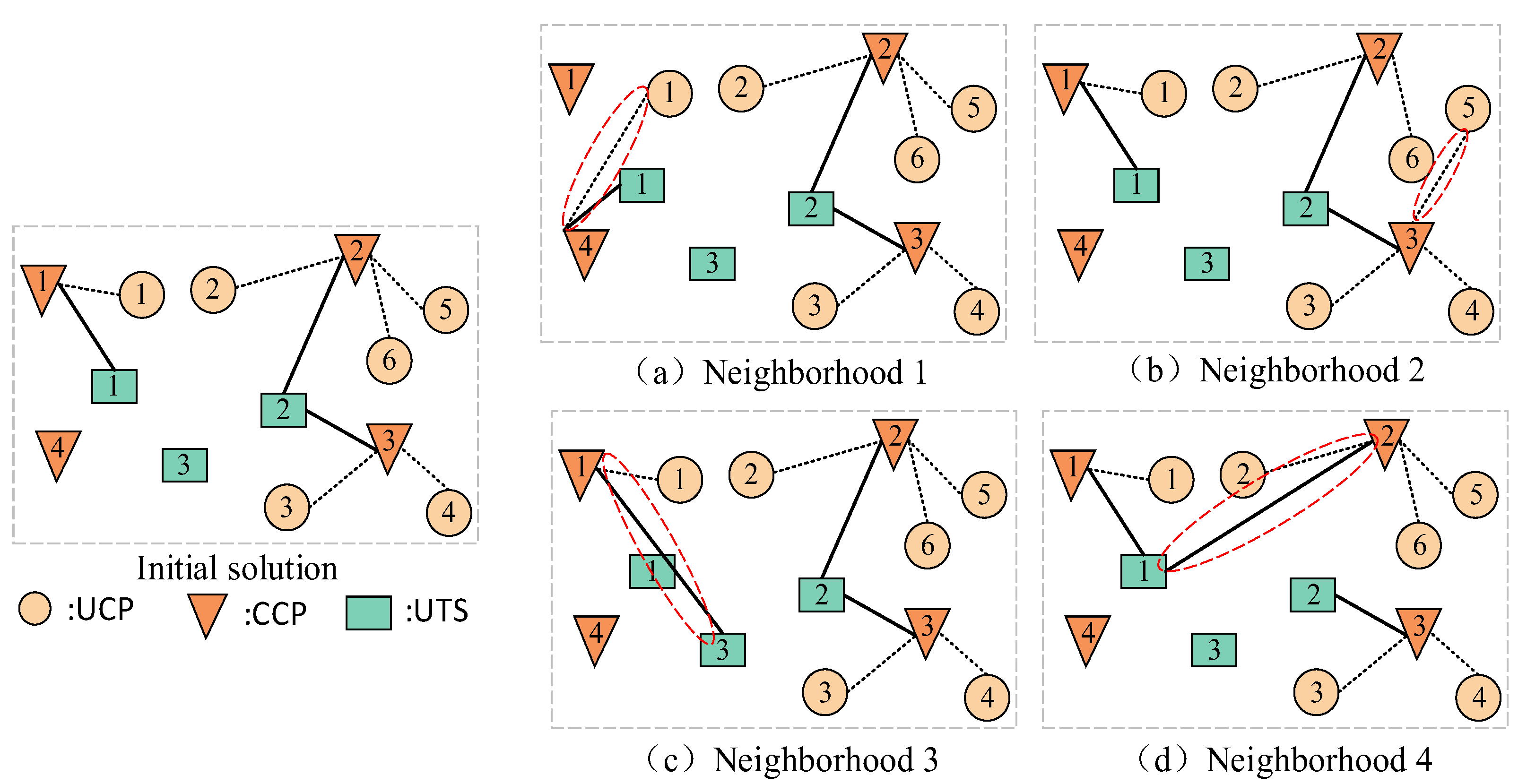
5.2.3. VNS
6. Case Study
6.1. Small-Sized Experiments
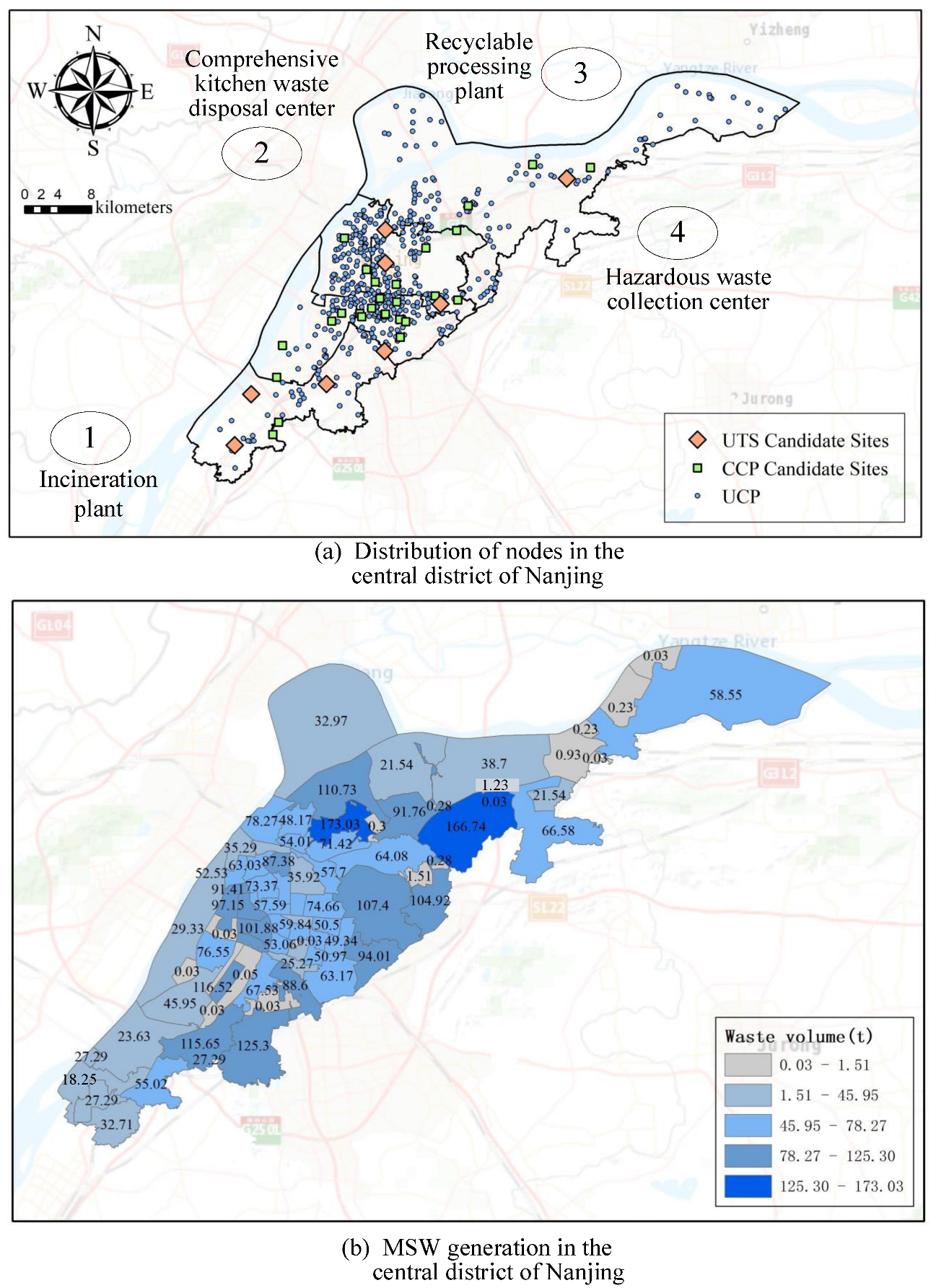
6.2. Background and Data
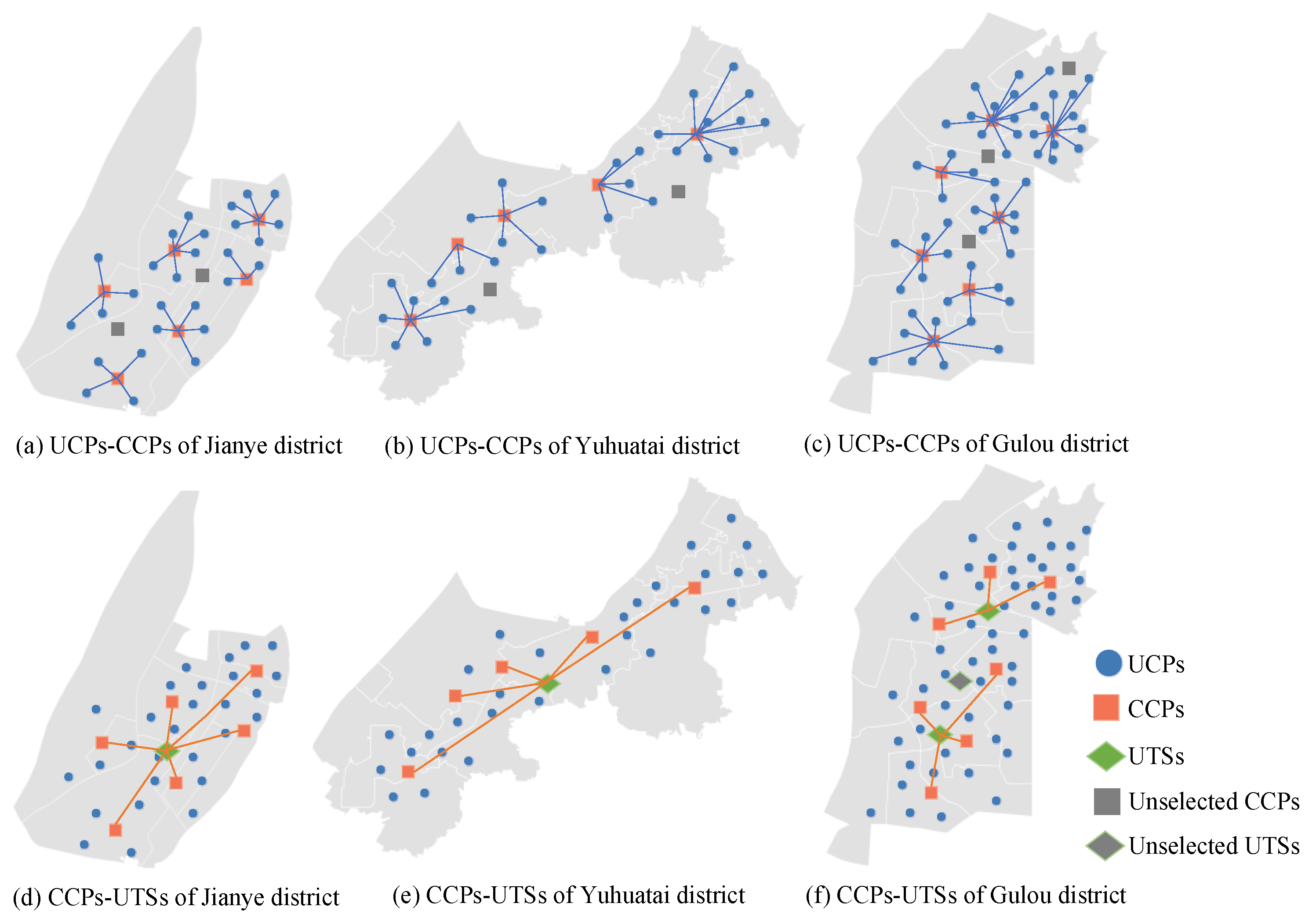
6.3. Results Analysis
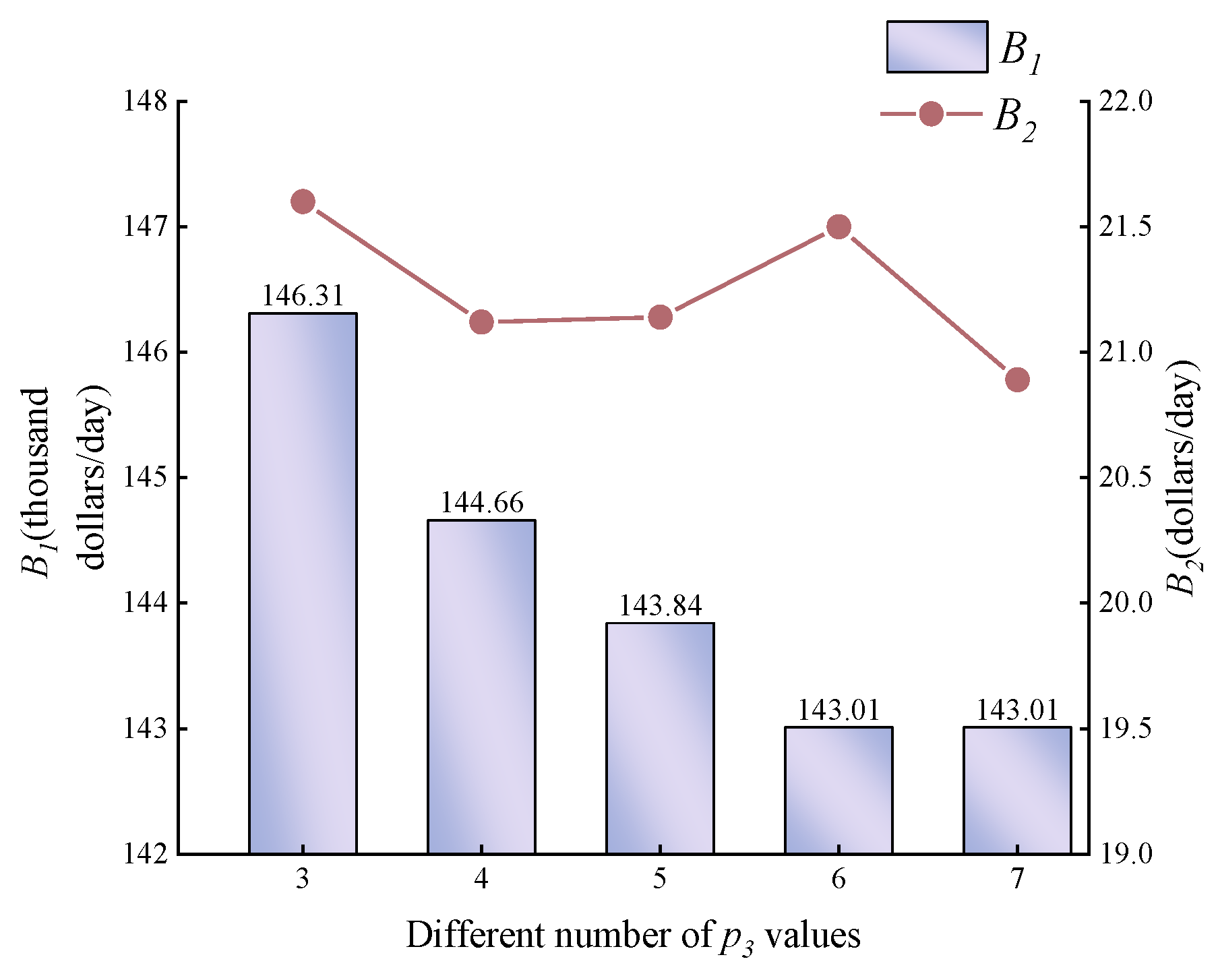
6.4. Sensitivity Analysis
- (1)
- Due to the disparate distribution of geography and waste volumes, the utilization rate of nodes and pipelines in various urban sectors may exhibit substantial disparities, thereby diminishing the economies of scale impact of the Underground Waste Collection System (UWCS). As cities progress and UWCS implementation unfolds, it becomes imperative for the government to provide policy support for subterranean transportation, thereby nurturing an optimal environment for the design of the UWCS network.
- (2)
- From an external perspective, the networked development of UWCS can bring significant social and environmental benefits, along with advantages from automated operations and economies of scale. It is anticipated that the advantages ushered in by UWCS at this juncture can significantly diminish the government’s financial outlay on the management, operation, and maintenance of MSW.
- (3)
- From the perspective of urban development, UWCS emerges as a potent strategy for propelling sustainable aspirations. By seamlessly melding a specialized subterranean infrastructure network, the management of MSW and subterranean transportation coalesce synergistically into a cohesive system committed to intelligent and sustainable MSW management endeavors. The automated categorization of MSW and the provision of real-time information updates during transportation confer considerable convenience upon residents in waste disposal, concurrently refining MSW management operations for governmental authorities.
7. Conclusions and Future Research
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. E-Topsis Computational Procedures
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables Constraints | Number at Most | Case |
|---|---|---|
| Variables xj, ym, ηj | 2 × |J| + |M| | 62 |
| Variables Zij, Sjm | |I| • |J| + |J| • |M| | 12,231 |
| Variables Zij, Sjm, Wmnu, Qiju, Pmnu, Rmnu | 2 × |U| • |M| • |N| + |U| • |I| • |J|+|U| • |J| • |M| | 49,180 |
| Cons. (5), (11), (13), (14), (16), (17) | |I| + 7 × |I| + 5 × |M| | 674 |
| Cons. (6), (7), (8), (9), (18) | |I| • |J| • (|U| + 2) | 72,090 |
| Cons. (10), (12), (19), (23) | 3 × |J| • |M| + 2 | 650 |
| Cons. (15), (20), (21), (22), (24), (25) | 2 × |J| + |M| + |I| • |J| • (3 × |U| + 1) + |J| • |M| • (3 × |U| + 1) + 4 × |U| • |M| • |N| | 159,577 |
| All | / | 294,464 |
| No | Hypothetical Instance | p1, p2, p3 | Approach | F1 | F2 | F3 | F | CPU Time (s) | Gap (%) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 50 UCPs, 3 CCPs, 2 UTSs | 2, 1, 1 | GGA-GVNS | 69.1190 | 0.0071 | 19.6226 | 88.7488 | 23.3045 | 0.0% |
| CPLEX | 69.1150 | 0.0071 | 19.6219 | 88.7440 | 0.4600 | ||||
| 2 | 50 UCPs, 5 CCPs, 3 UTSs | 5, 3, 2 | GGA-GVNS | 66.4527 | 0.0071 | 19.4427 | 85.9025 | 22.8315 | 0.3% |
| CPLEX | 66.6635 | 0.0071 | 19.5044 | 86.1750 | 0.4800 | ||||
| 3 | 100 UCPs, 5 CCPs, 3 UTSs | 5, 3, 2 | GGA-GVNS | 130.4497 | 0.0142 | 37.1766 | 167.6406 | 33.3904 | 1.2% |
| CPLEX | 132.0655 | 0.0142 | 37.6373 | 169.7170 | 14.4300 | ||||
| 4 | 100 UCPs, 10 CCPs, 5 UTSs | 10, 5, 3 | GGA-GVNS | 71.8308 | 0.0142 | 37.4301 | 109.2752 | 35.5050 | 0.0% |
| CPLEX | 71.8301 | 0.0142 | 37.4297 | 109.2740 | 47.7300 | ||||
| 5 | 150 UCPs, 10 CCPs, 5 UTSs | 10, 5, 3 | GGA-GVNS | 85.0939 | 0.0142 | 65.0640 | 150.1721 | 45.7244 | 0.0% |
| CPLEX | 85.0933 | 0.0142 | 65.0635 | 150.1710 | 80.3400 | 0.0% |
| Nomenclature of System Components | |
| UWCS | underground waste collection system |
| MSW | municipal solid waste |
| KW | kitchen waste |
| OW | other waste |
| RW | recyclable waste |
| HW | hazardous waste |
| UCP | underground collection point |
| CCP | concentrated collection point |
| UTS | underground transfer station |
| CKWDC | kitchen waste disposal center |
| IP | incineration plant |
| RPP | recyclable processing plant |
| HWCC | hazardous waste collection center |
| TP-1, TP-2, TP-3 | third-level pipelines (three types) |
| SP | second-level pipeline |
| FP | first-level pipeline |
References
- Farre, J.A.; Salgado-Pizarro, R.; Martin, M.; Zsembinszki, G.; Gasia, J.; Cabeza, L.F.; Barreneche, C.; Fernandez, A.I. Case study of pipeline failure analysis from two automated vacuum collection system. Waste Manag. 2021, 126, 643–651. [Google Scholar] [CrossRef]
- Khan, A.H.; Lopez-Maldonado, E.A.; Khan, N.A.; Villarreal-Gomez, L.J.; Munshi, F.M.; Alsabhan, A.H.; Perveen, K. Current solid waste management strategies and energy recovery in developing countries—State of art review. Chemosphere 2021, 291, 133088. [Google Scholar] [CrossRef] [PubMed]
- Sajid, M.; Raheem, A.; Ullah, N.; Asim, M.; Ur Rehman, M.S.; Ali, N. Gasification of municipal solid waste: Progress, challenges, and prospects. Renew. Sust. Energ. Rev. 2022, 168, 112815. [Google Scholar] [CrossRef]
- Saadatlu, E.A.; Barzinpour, F.; Yaghoubi, S. A sustainable model for municipal solid waste system considering global warming potential impact: A case study. Comput. Ind. Eng. 2022, 169, 108127. [Google Scholar] [CrossRef]
- Lino, F.A.; Ismail, K.A.; Castañeda-Ayarza, J.A. Municipal solid waste treatment in Brazil: A comprehensive review. Energy Nexus 2023, 11, 2772–4271. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Z.; Shan, W.; Yu, B. A stabilized branch-and-price-and-cut algorithm for the waste transportation problem with split transportation. Comput. Ind. Eng. 2023, 178, 109143. [Google Scholar] [CrossRef]
- Ding, Y.; Zhao, J.; Liu, J.-W.; Zhou, J.; Cheng, L.; Zhao, J.; Shao, Z.; Iris, Ç.; Pan, B.; Li, X.; et al. A review of China’s municipal solid waste (MSW) and comparison with international regions: Management and technologies in treatment and resource utilization. J. Clean Prod. 2021, 293, 126144. [Google Scholar] [CrossRef]
- Xiao, W.; Liu, T.; Tong, X. Assessing the carbon reduction potential of municipal solid waste management transition: Effects of incineration, technology and sorting in Chinese cities. Resour. Conserv. Recycl. 2023, 188, 106713. [Google Scholar] [CrossRef]
- Guo, S.; Chen, L. Why is China struggling with waste classification? A stakeholder theory perspective. Resour. Conserv. Recycl. 2022, 183, 106312. [Google Scholar] [CrossRef]
- Rathore, P.; Sarmah, S.P. Modeling transfer station locations considering source separation of solid waste in urban centers: A case study of Bilaspur city, India. J. Clean. Prod. 2019, 211, 44–60. [Google Scholar] [CrossRef]
- Wang, Y.; Shou, R.; Lee, L.H.; Chew, E.P. A case study on sample average approximation method for stochastic supply chain network design problem. Front. Eng. Manag. 2017, 4, 338–347. [Google Scholar] [CrossRef]
- Miller, B.; Spertus, J.; Kamga, C. Costs and benefits of pneumatic collection in three specific New York City cases. Waste Manag. 2014, 34, 1957–1966. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Dong, J.; Hwang, B.-G.; Ren, R.; Chen, Z. Hybrid optimization procedures applying for two-echelon urban underground logistics network planning: A case study of Beijing. Comput. Ind. Eng. 2020, 144, 106452. [Google Scholar] [CrossRef]
- Hu, W.; Dong, J.; Xu, N. Multi-period planning of integrated underground logistics system network for automated construction-demolition-municipal waste collection and parcel delivery: A case study. J. Clean. Prod. 2022, 330, 129760. [Google Scholar] [CrossRef]
- Popa, C.; Carutasu, G.; Cotet, C.; Carutasu, N.; Dobrescu, T. Smart City Platform Development for an Automated Waste Collection System. Sustainability 2017, 9, 2064. [Google Scholar] [CrossRef]
- Fen, B.; Ye, Q. Operations management of smart logistics: A literature review and future research. Front. Eng. Manag. 2020, 8, 344–355. [Google Scholar] [CrossRef]
- Jiang, Z.Z.; Feng, G.; Yi, Z.; Guo, X. Service-oriented manufacturing_ A literature review and future research directions. Front. Eng. Manag. 2022, 9, 71–88. [Google Scholar] [CrossRef]
- Chàfer, M.; Sole-Mauri, F.; Solé, A.; Boer, D.; Cabeza, L.F. Life cycle assessment (LCA) of a pneumatic municipal waste collection system compared to traditional truck collection. Sensitivity study of the influence of the energy source. J. Clean. Prod. 2019, 231, 1122–1135. [Google Scholar] [CrossRef]
- Hidalgo, D.; Martín-Marroquín, J.M.; Corona, F.; Juaristi, J.L. Sustainable vacuum waste collection systems in areas of difficult access. Tun. Under Space Technol. 2018, 81, 221–227. [Google Scholar] [CrossRef]
- Nakou, D.; Benardos, A.; Kaliampakos, D. Assessing the financial and environmental performance of underground automated vacuum waste collection systems. Tun. Under. Space Technol. 2014, 41, 263–271. [Google Scholar] [CrossRef]
- Jiawei, M.; Han, Y.; Li, L.; Liu, J. Distribution characteristics and potential risks of bacterial aerosol in waste transfer station. J Environ. Manag. 2023, 326, 116599. [Google Scholar] [CrossRef] [PubMed]
- Son Le, H.; Louati, A. Modeling municipal solid waste collection: A generalized vehicle routing model with multiple transfer stations, gather sites and inhomogeneous vehicles in time windows. Waste Manag. 2016, 52, 34–49. [Google Scholar] [CrossRef] [PubMed]
- Ye, Q.; Umer, Q.; Zhou, R.; Asmi, A.; Asmi, F. How publications and patents are contributing to the development of municipal solid waste management: Viewing the UN Sustainable Development Goals as ground zero. J. Environ. Manag. 2023, 325, 116496. [Google Scholar] [CrossRef] [PubMed]
- Pouriani, S.; Asadi-Gangraj, E.; Paydar, M.M. A robust bi-level optimization modelling approach for municipal solid waste management; a real case study of Iran. J. Clean Prod. 2019, 240, 118125. [Google Scholar] [CrossRef]
- Riaz, M.; Farid, H.M.A. Enhancing Green Supply Chain Efficiency Through Linear Diophantine Fuzzy Soft-Max Aggregation Operators. J. Ind. Intell. 2023, 1, 8–29. [Google Scholar] [CrossRef]
- Wu, T.-W.; Zhang, H.; Peng, W.; Lv, F.; He, P.-J. Applications of convolutional neural networks for intelligent waste identification and recycling: A review. J. Environ. Manag. 2023, 190, 106813. [Google Scholar] [CrossRef]
- Fernández, C.; Manyà, F.; Mateu, C.; Sole-Mauri, F. Approximate dynamic programming for automated vacuum waste collection systems. Environ. Modell. Soft. 2015, 67, 128–137. [Google Scholar] [CrossRef]
- Li, H.Q.; Fan, Y.Q.; Yu, M.J. Deep Shanghai project—A strategy of infrastructure integration for megacities. Tun. Under. Space Technol. 2018, 81, 547–567. [Google Scholar] [CrossRef]
- Tsydenova, N.; Becker, T.; Walther, G. Optimized design of concrete recycling networks: The case of North Rhine-Westphalia. Waste Manag. 2021, 135, 309–317. [Google Scholar] [CrossRef]
- Oyola-Cervantes, J.; Amaya-Mier, R. Reverse logistics network design for large off-the-road scrap tires from mining sites with a single shredding resource scheduling application. Waste Manag. 2019, 100, 219–229. [Google Scholar] [CrossRef]
- Trochu, J.; Chaabane, A.; Ouhimmou, M. A two-stage stochastic optimization model for reverse logistics network design under dynamic suppliers’ locations. Waste Manag. 2019, 95, 569–583. [Google Scholar] [CrossRef] [PubMed]
- Govindan, K.; Nosrati-Abarghooee, S.; Nasiri, M.M.; Jolai, F. Green reverse logistics network design for medical waste management: A circular economy transition through case approach. J. Environ. Manag. 2022, 322, 115888. [Google Scholar] [CrossRef]
- Yousefloo, A.; Babazadeh, R.; Mohammadi, M.; Pirayesh, A.; Dolgui, A. Design of a robust waste recycling network integrating social and environmental pillars of sustainability. Comput. Ind. Eng. 2023, 176, 108970. [Google Scholar] [CrossRef]
- Blazquez, C.; Paredes-Belmar, G. Network design of a household waste collection system: A case study of the commune of Renca in Santiago, Chile. Waste Manag. 2020, 116, 179–189. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Pu, X.; Han, X. Sustainable smart waste classification and collection system: A bi-objective modeling and optimization approach. J. Clean. Prod. 2020, 276, 124183. [Google Scholar] [CrossRef]
- Shang, X.; Yang, K.; Jia, B.; Gao, Z. The stochastic multi-modal hub location problem with direct link strategy and multiple capacity levels for cargo delivery systems. Transp. A Transp. Sci. 2020, 17, 380–410. [Google Scholar] [CrossRef]
- Hashemi-Amiri, O.; Mohammadi, M.; Rahmanifar, G.; Hajiaghaei-Keshteli, M.; Fusco, G.; Colombaroni, C. An allocation-routing optimization model for integrated solid waste management. Expert Syst. Appl. 2023, 227, 0957–4174. [Google Scholar] [CrossRef]
- Enevo. 2022. Available online: https://enevo.com/ (accessed on 12 July 2022).
- Envac. 2022. Available online: https://cleanrobotics.com/ (accessed on 12 July 2022).
- Zhao, L.; Zhou, J.; Li, H.; Yang, P.; Zhou, L. Optimizing the design of an intra-city metro logistics system based on a hub-and-spoke network model. Tun. Under. Space Technol. 2021, 116, 104086. [Google Scholar] [CrossRef]
- Dai, L.; Wang, J. Evaluation of the Profitability of Power Listed Companies Based on Entropy Improved TOPSIS Method. Procedia Eng. 2011, 15, 4728–4732. [Google Scholar] [CrossRef]
- Eftihia Nathanaila, G.A.M.G. A novel approach for assessing sustainable city logistics. Transp. Res. Procedia 2016, 25, 1036–1045. [Google Scholar] [CrossRef]
- Sengupta, D.; Das, A.; Bera, U.K. A sustainable green reverse logistics plan for plastic solid waste management using TOPSIS method. Environ. Sci. Pollut Res. 2023, 30, 97734–97753. [Google Scholar] [CrossRef] [PubMed]
- Sagnak, M.; Berberoglu, Y.; Memis, I.; Yazgan, O. Sustainable collection center location selection in emerging economy for electronic waste with fuzzy Best-Worst and fuzzy TOPSIS. Waste Manag. 2021, 127, 37–47. [Google Scholar] [CrossRef] [PubMed]
- Petrović, N.; Živojinović, T.; Mihajlović, J. Evaluating the Annual Operational Efficiency of Passenger and Freight Road Transport in Serbia Through Entropy and TOPSIS Methods. J. Eng. Manag. Syst. Eng. 2023, 2, 204–211. [Google Scholar] [CrossRef]
- Dong, J.; Hu, W.; Yan, S.; Ren, R.; Zhao, X. Network Planning Method for Capacitated Metro-Based Underground Logistics System. Adv. Civ. Eng. 2018, 2018, 6958086. [Google Scholar] [CrossRef]
- Hu, W.; Dong, J.; Ren, R.; Chen, Z. Underground logistics systems: Development overview and new prospects in China. Front. Eng. Manag. 2023, 10, 354–359. [Google Scholar] [CrossRef]
- Hu, W.; Dong, J.; Yang, K.; Hwang, B.G.; Ren, R.; Chen, Z. Reliable design of urban surface-underground integrated logistics system network with stochastic demand and social-environmental concern. Comput. Ind. Eng. 2023, 181, 109331. [Google Scholar] [CrossRef]
- Hansen, N.; Mladenović, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]
- Dib, O.; Manier, M.-A.; Moalic, L.; Caminada, A. Combining VNS with Genetic Algorithm to solve the one-to-one routing issue in road networks. Comput. Oper. Res. 2017, 78, 420–430. [Google Scholar] [CrossRef]
- Lv, J.; Dong, H.; Geng, Y.; Li, H. Optimization of recyclable MSW recycling network: A Chinese case of Shanghai. Waste Manag. 2020, 102, 763–772. [Google Scholar] [CrossRef]
- Soni, A.R.; Chandel, M.K. Assessment of emission reduction potential of Mumbai metro rail. J. Clean. Prod. 2018, 197, 1579–1586. [Google Scholar] [CrossRef]
- Coulombel, N.; Dablanc, L.; Gardrat, M.; Koning, M. The environmental social cost of urban road freight: Evidence from the Paris region. Transp. Res. Part D Transp. Environ. 2018, 63, 514–532. [Google Scholar] [CrossRef]
- Hu, W.; Dong, J.; Hwang, B.G.; Ren, R.; Chen, Z. Network planning of urban underground logistics system with hub-and-spoke layout: Two phase cluster-based approach. Eng. Constr. Archit. Manag. 2020, 27, 2079–2105. [Google Scholar] [CrossRef]
- Roy, A.; Manna, A.; Kim, J.; Moon, I. IoT-based smart bin allocation and vehicle routing in solid waste management: A case study in South Korea. Comput. Ind. Eng. 2022, 171, 108457. [Google Scholar] [CrossRef]
- Tirkolaee, E.B.; Mahdavi, I.; Esfahani, M.M.S.; Weber, G.W. A robust green location-allocation-inventory problem to design an urban waste management system under uncertainty. Waste Manag. 2020, 102, 340–350. [Google Scholar] [CrossRef]
- Zhao, H.R.; Cao, Y.; Wang, X.; Li, B.K.; Wang, Y.W. Distributionally robust optimization for dispatching the integrated operation of rural multi-energy system and waste disposal facilities under uncertainties. Energy Sustain. Dev. 2023, 77, 101340. [Google Scholar] [CrossRef]



| Technical Type | Vehicle Systems Option with Packaging Mode | Pipe Diameter | Power | Capacity | Cost | Source | |
|---|---|---|---|---|---|---|---|
| Pipelines | TP | Envac | 0.6–1 m | Vacuum tube | NA | USD 0.4 (106/km) | [38] |
| NV | 0.5–1 m | Pneumatic | 0.5 t/h | USD 0.2 (106/km) | [20] | ||
| SP | PCP | 4–6 m | Pneumatic | 10 t/h | USD 4.5 (106/km) | [14] | |
| UCT | 6–8 m | Electric rail | 75 t/h | USD 7 (106/km) | [13] | ||
| FP | PCP | 4–6 m | Pneumatic | 10 t/h | USD 5 (106/km) | [14] | |
| UCT | 6–8 m | Electric rail | 75 t/h | USD 7 (106/km) | [13] | ||
| Pre-processing device | UN | Electric | 45 t | 7.8 × 103 (USD) | Local standard | ||
| Compression device | UN | Electric | 13 t | 2.2 × 103 (USD) | Local standard | ||
| Classification device | UN | Electric | 17 t | 3.0 × 103 (USD) | Local standard | ||
| Symbol Definition Indices | ||
|---|---|---|
| I | set of UCPs, indexed by i | |
| J | set of CCPs, indexed by j | |
| M | set of UTSs, indexed by m | |
| N | set of treatment plants N = {1, 2, 3, 4}, Where 1 indicates the CKWDC, 2 indicates the IP, 3 indicates the RPP, and 4 indicates the HWCC | |
| U | set of MSW U = {a, b, c, d}, where a denotes KW, b denotes OW, c denotes RW, and d denotes HW | |
| Parameters | ||
| qi | MSW quantities at i | kg |
| βa, βb, βc, βd | the proportion of KW, OW, RW, and HW, respectively | / |
| h2, h3 | fixed cost for establishing CCP and UTS, respectively | USD |
| C1, C2, C3 | fixed cost for establishing per km of FPs, SPs, TPs, respectively | USD/km |
| l | purchase cost of MSW handling equipment | USD |
| v | unit disposal cost of MSW at j | USD/t |
| dij | Euclidean distance between i and j | km |
| djm | Euclidean distance between j and m | km |
| dmn | Euclidean distance between m and n | km |
| L1, L2 | unit transport cost of MSW via SP, or TP, respectively | USD/t km |
| L3 | unit transport cost of MSW via road | USD/t km |
| cap | capacity of MSW handling equipment at j | t |
| capm | MSW handling capacity at UTS m | t |
| cap3-1, cap3-2, cap3-3 | maximal underground traffic of MSW used for TP-1, TP-2, and TP-3 | t/d |
| cap2 | maximal underground traffic of MSW used SP | t/d |
| r1 | maximal covering radius of UCP to the affiliated CCP | km |
| r2 | maximal covering radius of CCP to the affiliated UTS | km |
| p1, p2 | maximum number of CCPs or UTSs allowed to be built | / |
| p3 | maximum number of equipment allowed to be installed at CCP | / |
| T | Any large number | / |
| depreciation factor for infrastructure | / | |
| Ai, Aj, Am | the floor area of UCP, CCP, and UTS, respectively | m2 |
| Cop | urban land opportunity cost | USD/m2 year |
| fRT | average load of RT for transporting MSW | t/vehicle |
| ξcarbon, ξNOx, ξPM | average carbon, NOx, and PM emission factors of trucks (i.e., HMT, LGT, and RT), respectively | g/km truck trip |
| λcarbon, λNOx, λPM | unit treatment cost of carbon, NOx, and PM, respectively | USD/t |
| θwater, θnoise | treatment cost of the water pollution and noise caused by truck operations, respectively | USD/km truck trip |
| τ | average diesel consumption factor of HMT, LGT, and RT | L/km |
| Ψ | unit price of diesel | USD/liter |
| Decision variables | ||
| binary variable equals 1 if site j is built as CCP; 0, otherwise | ||
| binary variable equals 1 if site n is built as UTS; 0, otherwise | ||
| binary variable equals 1 if i is allocated to j and traverses Type III; 0, otherwise | ||
| binary variable equals 1 if j is allocated to m and traverses Type II; 0, otherwise | ||
| binary variable equals 1 if m is allocated to n including each type of waste U; 0, otherwise | ||
| continuous variable, the number of each type of waste U allocated from i to j | ||
| continuous variable, the number of each type of waste U allocated from j to m | ||
| continuous variable, the number of each type of waste U allocated from m to n; | ||
| integer variable, total amount of MSW handling equipment installed at j |
| Operator | Complexity of Each Optimization Step | Magnitude of Calculation |
|---|---|---|
| Neighborhood 1 operator | ||
| Neighborhood 2 operator | ||
| Neighborhood 3 operator | ||
| Neighborhood 4 operator | ||
| Shaking operator | ||
| Overall time complexity |
| Parameters | Value | Source/Reference |
|---|---|---|
| βa, βb, βc, βd | 0.55, 0.18, 0.22, 0.01 | Local standard |
| h2 | USD 2.56 × 103 | [13] |
| h3 | USD 1.2 × 104 | [13] |
| C1 | USD 1.9 × 106 per km | [14] |
| C2 | USD 1.9 × 106 per km | [14] |
| C3 | USD 0.25 × 106 per km | [14] |
| l | USD 13 × 103 | Local standard |
| v | USD 40 per t | Expert |
| L2 | USD 0.25 per t km | [27] |
| L1 | USD 0.25 per t km | [27] |
| L3 | USD 0.4624 per t km | Local standard |
| cap | 75 t | [14] |
| capm | 1 × 103 t | [14] |
| cap3-1 | 12 t/d | Expert |
| cap3-2 | 12 t/d | Expert |
| cap3-3 | 12 t/d | Expert |
| cap2 | 5.5 × 102 t/d | Expert |
| p1 | 18 | Hypothetical |
| p2 | 5 | Hypothetical |
| p3 | 3 | Hypothetical |
| T | 10,000 | Hypothetical |
| π | 1/3650 | Local standard |
| r1 | 5 km | Hypothetical |
| r2 | 20 km | Hypothetical |
| Ai, Aj, Am | 100 m2/300 m2/800 m2 | Local standard |
| Cop | USD 1000 per m2 year | Local standard |
| fRT | 6 t per vehicle | Local standard |
| ξcarbon | 286 g per km truck trip | [52] |
| ξNOX | 1 g per km truck trip | [53] |
| ξPM | 0.12 g per km truck trip | [53,54] |
| λcarbon | USD 307 per t | [55] |
| λNOx, λPM | USD 14,743 per t/USD 37,622 per t | [53] |
| θwater, | USD 0.047 per km truck trip | [14] |
| θnoise | USD 0.032 per km truck trip | [14] |
| τ | 0.125 L per km | Local standard |
| Ψ | USD 1.02 per liter | Local standard |
| Network Hierarchy | Nodes Number | Type of MSW | Load Rate of SP or TP | Total Length of ST or TP per Segment (km) | Transport Cost on ST or TP per Segment (USD) | |||
|---|---|---|---|---|---|---|---|---|
| KW (kg) | OW (kg) | RW (kg) | HW (kg) | |||||
| UCP and UTS | 3-5 | 82.30 | 26.94 | 32.92 | 1.50 | 26.12% | 11.31 | 0.41 |
| 4-5 | 31.41 | 10.28 | 12.56 | 0.57 | 9.97% | 14.22 | 0.19 | |
| 7-5 | 122.15 | 39.98 | 48.86 | 2.22 | 38.77% | 3.75 | 0.20 | |
| 8-7 | 128.09 | 41.92 | 51.24 | 2.33 | 40.65% | 3.62 | 0.20 | |
| 9-7 | 128.68 | 42.11 | 51.47 | 2.34 | 40.84% | 2.17 | 0.12 | |
| 10-7 | 128.70 | 42.12 | 51.48 | 2.34 | 40.84% | 2.41 | 0.14 | |
| 11-2 | 128.79 | 42.15 | 51.52 | 2.34 | 40.87% | 4.25 | 0.24 | |
| 13-5 | 128.37 | 42.01 | 51.35 | 2.33 | 40.74% | 4.62 | 0.26 | |
| 16-1 | 28.89 | 9.46 | 11.56 | 0.53 | 9.17% | 2.66 | 0.03 | |
| 18-5 | 127.60 | 41.76 | 51.04 | 2.32 | 40.49% | 6.21 | 0.35 | |
| 19-2 | 99.76 | 32.65 | 39.90 | 1.81 | 31.66% | 8.77 | 0.38 | |
| 20-7 | 128.86 | 42.17 | 51.54 | 2.34 | 40.89% | 2.05 | 0.12 | |
| 21-2 | 128.22 | 41.96 | 51.29 | 2.33 | 40.69% | 4.500 | 0.25 | |
| 22-2 | 87.02 | 28.48 | 34.81 | 1.58 | 27.62% | 9.612 | 0.36 | |
| 23-1 | 22.67 | 7.42 | 9.07 | 0.41 | 7.19% | 3.741 | 0.04 | |
| 24-2 | 127.69 | 41.79 | 51.08 | 2.32 | 40.52% | 7.470 | 0.42 | |
| 25-1 | 109.40 | 35.80 | 43.76 | 1.99 | 34.72% | 16.624 | 0.79 | |
| 26-5 | 80.83 | 26.45 | 32.33 | 1.47 | 25.65% | 2.156 | 0.08 | |
| 27-7 | 51.86 | 16.97 | 20.75 | 0.94 | 16.46% | 5.176 | 0.12 | |
| UTS and treatment plants | 1 | 160.96 | 52.68 | 64.38 | 2.93 | -- | 29.20 | 13.66 |
| 2 | 571.49 | 187.03 | 228.59 | 10.39 | -- | 31.35 | 4.80 | |
| 5 | 572.66 | 187.42 | 229.06 | 10.41 | -- | 36.60 | 12.67 | |
| 7 | 566.19 | 185.30 | 226.48 | 10.29 | -- | 27.45 | 0.23 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Q.; Chen, Y.; Hu, W.; Dong, J.; Sun, B.; Cheng, H. Underground Logistics Network Design for Large-Scale Municipal Solid Waste Collection: A Case Study of Nanjing, China. Sustainability 2023, 15, 16392. https://doi.org/10.3390/su152316392
Liu Q, Chen Y, Hu W, Dong J, Sun B, Cheng H. Underground Logistics Network Design for Large-Scale Municipal Solid Waste Collection: A Case Study of Nanjing, China. Sustainability. 2023; 15(23):16392. https://doi.org/10.3390/su152316392
Chicago/Turabian StyleLiu, Qing, Yicun Chen, Wanjie Hu, Jianjun Dong, Bo Sun, and Helan Cheng. 2023. "Underground Logistics Network Design for Large-Scale Municipal Solid Waste Collection: A Case Study of Nanjing, China" Sustainability 15, no. 23: 16392. https://doi.org/10.3390/su152316392
APA StyleLiu, Q., Chen, Y., Hu, W., Dong, J., Sun, B., & Cheng, H. (2023). Underground Logistics Network Design for Large-Scale Municipal Solid Waste Collection: A Case Study of Nanjing, China. Sustainability, 15(23), 16392. https://doi.org/10.3390/su152316392