


Modelling of Metaheuristics with Machine Learning-Enabled Cybersecurity in Unmanned Aerial Vehicles

 , , ,
, , ,
Abstract
1. Introduction
- An intelligent MMLCS-UAV technique encompassing QIWO-FS, a WRELM classification, and SSO-based parameter tuning is introduced to detect intrusions in a UAV network.
- A QIWO-FS technique is developed using a standard IWO algorithm and quantum computing, which helps to select the useful features from the dataset.
- SSO-based parameter tuning for the WRELM model is designed to eliminate the tedious trial and error parameter tuning process. This also helps to enhance the predictive outcomes of the proposed model for unseen data.
2. Literature Review
3. The Proposed Model
3.1. Algorithmic Design of the QIWO-FS Technique
- (1)
- Initializing Population: several seeds are partially spread in the searching space.
- (2)
- Reproduction is initiated by pouring every individual plant into the flowering plant; then, the procedure can generate seeds that are worth their proportion. Later, the quantity of the plant seeds linearly decreases from to :
- (3)
- This stage is related to determining a novel location of the seed in the search space. Here, the child seed is positioned near to the parents.
- (4)
- Competitive removal is related to generating the optimum seeds. This happens whilst the amount of seeds obtains a certain range .
- (5)
- Finally, once the criteria are fulfilled, to finish the process, the second phase is repeated; otherwise, the procedure stops.
3.2. Intrusion Detection Process
- An aimless particle ;
- A leader particle ;
- An explorer particle .
4. Performance Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G Enabled Unmanned Aerial Vehicle Traffic Management: A Perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Chien, W.C.; Lai, C.F.; Hossain, M.S.; Muhammad, G. Heterogeneous Space and Terrestrial Integrated Networks for IoT: Architecture and Challenges. IEEE Netw. 2018, 33, 15–21. [Google Scholar] [CrossRef]
- Karatas, G.; Demir, O.; Sahingoz, O.K. Increasing the Performance of Machine Learning-Based IDSs on an Imbalanced and Up-to-Date Dataset. IEEE Access 2020, 8, 32150–32162. [Google Scholar] [CrossRef]
- Shrestha, R.; Nam, S.Y.; Bajracharya, R.; Kim, S. Evolution of V2X Communication and Integration of Blockchain for Security Enhancements. Electronics 2020, 9, 1338. [Google Scholar] [CrossRef]
- Leevy, J.L.; Khoshgoftaar, T.M. A survey and analysis of intrusion detection models based on CSE-CIC-IDS2018 Big Data. J. Big Data 2020, 7, 104. [Google Scholar] [CrossRef]
- Ferrag, M.A.; Maglaras, L. DeliveryCoin: An IDS and Blockchain-Based Delivery Framework for Drone-Delivered Services. Computers 2019, 8, 58. [Google Scholar] [CrossRef]
- D’hooge, L.; Wauters, T.; Volckaert, B.; De Turck, F. Inter-dataset generalization strength of supervised machine learning methods for intrusion detection. J. Inf. Secur. Appl. 2020, 54, 102564. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Kim, H.; Shim, M.; Choi, E. CNN-Based Network Intrusion Detection against Denial-of-Service Attacks. Electronics 2020, 9, 916. [Google Scholar] [CrossRef]
- Gamage, S.; Samarabandu, J. Deep learning methods in network intrusion detection: A survey and an objective comparison. J. Netw. Comput. Appl. 2020, 169, 102767. [Google Scholar] [CrossRef]
- Zhang, H.; Li, J.L.; Liu, X.M.; Dong, C. Multi-dimensional feature fusion and stacking ensemble mechanism for network intrusion detection. Future Gener. Comput. Syst. 2021, 122, 130–143. [Google Scholar] [CrossRef]
- Fotohi, R.; Abdan, M.; Ghasemi, S. A Self-Adaptive Intrusion Detection System for Securing UAV-to-UAV Communications Based on the Human Immune System in UAV Networks. J. Grid Comput. 2022, 20, 22. [Google Scholar] [CrossRef]
- Khan, A.A.; Khan, M.M.; Khan, K.M.; Arshad, J.; Ahmad, F. A blockchain-based decentralized machine learning framework for collaborative intrusion detection within UAVs. Comput. Netw. 2021, 196, 108217. [Google Scholar] [CrossRef]
- Abu Al-Haija, Q.; Al Badawi, A. High-performance intrusion detection system for networked UAVs via deep learning. Neural Comput. Appl. 2022, 34, 10885–10900. [Google Scholar] [CrossRef]
- Basan, E.; Lapina, M.; Mudruk, N.; Abramov, E. Intelligent intrusion detection system for a group of UAVs. In International Conference on Swarm Intelligence; Springer: Cham, Switzerland, 2021; pp. 230–240. [Google Scholar]
- Whelan, J.; Almehmadi, A.; El-Khatib, K. Artificial intelligence for intrusion detection systems in unmanned aerial vehicles. Comput. Electr. Eng. 2022, 99, 107784. [Google Scholar] [CrossRef]
- Wang, C.N.; Yang, F.C.; Nguyen, V.T.T.; Nguyen, Q.M.; Huynh, N.T.; Huynh, T.T. Optimal Design for Compliant Mechanism Flexure Hinges: Bridge-Type. Micromachines 2021, 12, 1304. [Google Scholar] [CrossRef]
- Radanliev, P.; De Roure, D.; Maple, C.; Ani, U. Super-forecasting the ‘technological singularity’risks from artificial intelligence. Evol. Syst. 2022, 13, 747–757. [Google Scholar] [CrossRef]
- Radanliev, P.; De Roure, D.; Maple, C.; Santos, O. Forecasts on Future Evolution of Artificial Intelligence and Intelligent Systems. IEEE Access 2022, 10, 45280–45288. [Google Scholar] [CrossRef]
- Wang, C.N.; Yang, F.C.; Nguyen, V.T.T.; Vo, N.T. CFD analysis and optimum design for a centrifugal pump using an effectively artificial intelligent algorithm. Micromachines 2022, 13, 1208. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Huynh, N.T.; Vu, N.C.; Kieu, V.N.; Huang, S.C. Optimizing compliant gripper mechanism design by employing an effective bi-Algorithm: Fuzzy logic and ANFIS. Microsyst. Technol. 2021, 27, 3389–3412. [Google Scholar] [CrossRef]
- Shrestha, R.; Omidkar, A.; Roudi, S.A.; Abbas, R.; Kim, S. Machine-learning-enabled intrusion detection system for cellular connected UAV networks. Electronics 2021, 10, 1549. [Google Scholar] [CrossRef]
- Basavaraj, D.; Tayeb, S. Towards a Lightweight Intrusion Detection Framework for In-Vehicle Networks. J. Sens. Actuator Netw. 2022, 11, 6. [Google Scholar] [CrossRef]
- Zhang, R.; Condomines, J.P.; Lochin, E. A Multifractal Analysis and Machine Learning Based Intrusion Detection System with an Application in a UAS/RADAR System. Drones 2022, 6, 21. [Google Scholar] [CrossRef]
- Tan, X.; Su, S.; Zuo, Z.; Guo, X.; Sun, X. Intrusion detection of UAVs based on the deep belief network optimized by PSO. Sensors 2019, 19, 5529. [Google Scholar] [CrossRef]
- Praveena, V.; Vijayaraj, A.; Chinnasamy, P.; Ali, I.; Alroobaea, R.; Alyahyan, S.Y.; Raza, M.A. Optimal deep reinforcement learning for intrusion detection in UAVs. CMC-Comput. Mater. Contin. 2022, 70, 2639–2653. [Google Scholar] [CrossRef]
- Masadeh, A.E.; Alhafnawi, M.; Salameh, H.A.B.; Musa, A.; Jararweh, Y. Reinforcement Learning-Based Security/Safety UAV System for Intrusion Detection Under Dynamic and Uncertain Target Movement. IEEE Trans. Eng. Manag. 2022, 1–11. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, R.; Kumar, A.; Franklin, A.A.; Jolfaei, A. Blockchain and deep learning empowered secure data sharing framework for softwarized uavs. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 770–775. [Google Scholar]
- Misaghi, M.; Yaghoobi, M. Improved invasive weed optimization algorithm (IWO) based on chaos theory for optimal design of PID controller. J. Comput. Des. Eng. 2019, 6, 284–295. [Google Scholar] [CrossRef]
- Razmjooy, N.; Razmjooy, S. Skin melanoma segmentation using neural networks optimized by quantum invasive weed optimization algorithm. In Metaheuristics and Optimization in Computer and Electrical Engineering; Springer: Cham, Switzerland, 2021; pp. 233–250. [Google Scholar]
- Alizadeh, A.; Rajabi, A.; Shabanlou, S.; Yaghoubi, B.; Yosefvand, F. Modeling long-term rainfall-runoff time series through wavelet-weighted regularization extreme learning machine. Earth Sci. Inform. 2021, 14, 1047–1063. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, G. The Novel Successive Variational Mode Decomposition and Weighted Regularized Extreme Learning Machine for Fault Diagnosis of Automobile Gearbox. Shock. Vib. 2021, 2021, 5544031. [Google Scholar] [CrossRef]
- Maimaitiyiming, M.; Sagan, V.; Sidike, P.; Kwasniewski, M.T. Dual activation function-based Extreme Learning Machine (ELM) for estimating grapevine berry yield and quality. Remote Sens. 2019, 11, 740. [Google Scholar] [CrossRef]
- Poongodi, K.; Kumar, D. Mining serial positioning episode rules by natural exponent inertia weight based swallow swarm optimization algorithm with constraint based event sequences. J. Intell. Fuzzy Syst. 2021, 40, 4599–4615. [Google Scholar] [CrossRef]
- Neshat, M.; Sepidnam, G.; Sargolzaei, M. Swallow swarm optimization algorithm: A new method to optimization. Neural Comput. Appl. 2013, 23, 429–454. [Google Scholar] [CrossRef]
- Hodashinsky, I.; Sarin, K.; Shelupanov, A.; Slezkin, A. Feature selection based on swallow swarm optimization for fuzzy classification. Symmetry 2019, 11, 1423. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | MCC | ||||
|---|---|---|---|---|---|
| Training Phase (80%) | |||||
| Botnet | 99.24 | 97.01 | 98.40 | 97.70 | 97.25 |
| Dos | 99.69 | 99.25 | 98.92 | 99.09 | 98.90 |
| Web | 99.42 | 98.09 | 98.42 | 98.26 | 97.91 |
| Infilteration | 99.25 | 97.41 | 98.07 | 97.74 | 97.29 |
| BruteForce | 99.22 | 97.79 | 97.46 | 97.62 | 97.16 |
| DDos | 99.40 | 99.09 | 97.41 | 98.24 | 97.89 |
| Average | 99.37 | 98.11 | 98.11 | 98.11 | 97.73 |
| Testing Phase (20%) | |||||
| Botnet | 99.50 | 98.10 | 99.04 | 98.56 | 98.26 |
| Dos | 99.72 | 98.98 | 99.32 | 99.15 | 98.98 |
| Web | 99.44 | 98.00 | 98.66 | 98.33 | 98.00 |
| Infilteration | 99.50 | 98.71 | 98.39 | 98.55 | 98.24 |
| BruteForce | 99.50 | 99.06 | 98.13 | 98.59 | 98.29 |
| DDos | 99.78 | 99.62 | 98.87 | 99.25 | 99.12 |
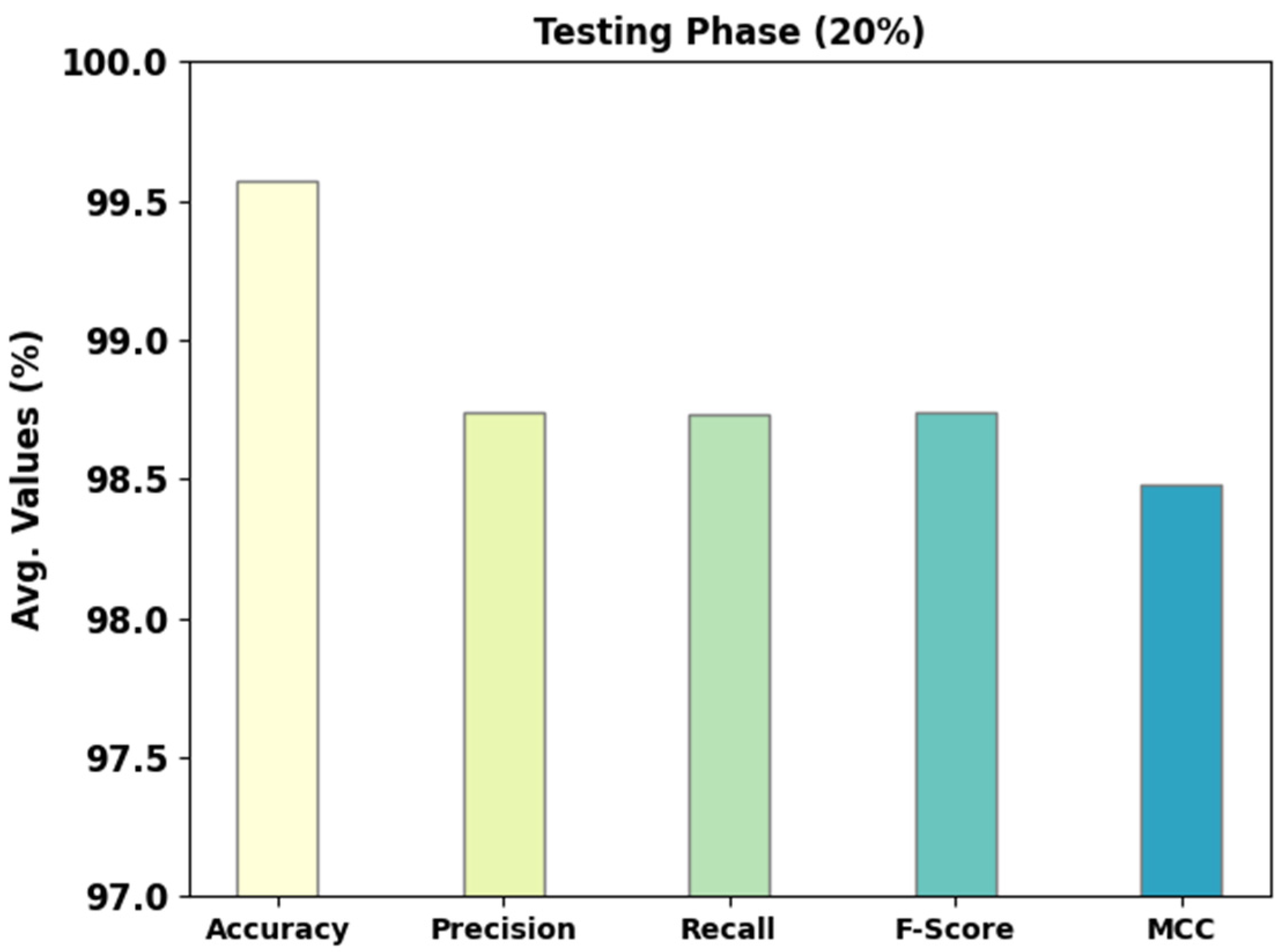
| Average | 99.57 | 98.74 | 98.73 | 98.74 | 98.48 |
| Class | MCC | ||||
|---|---|---|---|---|---|
| Training Phase (70%) | |||||
| Botnet | 99.37 | 97.98 | 98.17 | 98.07 | 97.69 |
| Dos | 99.32 | 98.08 | 97.79 | 97.94 | 97.53 |
| Web | 99.38 | 98.36 | 97.89 | 98.12 | 97.75 |
| Infilteration | 99.44 | 97.97 | 98.79 | 98.38 | 98.05 |
| BruteForce | 99.44 | 98.17 | 98.45 | 98.31 | 97.98 |
| DDos | 99.65 | 99.25 | 98.69 | 98.97 | 98.76 |
| Average | 99.43 | 98.30 | 98.30 | 98.30 | 97.96 |
| Testing Phase (30%) | |||||
| Botnet | 99.70 | 99.14 | 99.14 | 99.14 | 98.96 |
| Dos | 99.52 | 98.90 | 98.25 | 98.57 | 98.28 |
| Web | 99.78 | 98.92 | 99.78 | 99.35 | 99.22 |
| Infilteration | 99.48 | 98.12 | 98.58 | 98.35 | 98.04 |
| BruteForce | 99.59 | 99.35 | 98.29 | 98.82 | 98.57 |
| DDos | 99.48 | 98.15 | 98.61 | 98.38 | 98.07 |
| Average | 99.59 | 98.76 | 98.77 | 98.77 | 98.52 |
| Methods | ||||
|---|---|---|---|---|
| MMLCS-UAV | 99.59 | 98.76 | 98.77 | 98.77 |
| GA-DBN | 91.76 | 90.28 | 98.14 | 98.02 |
| BOA-DBN | 91.13 | 89.70 | 98.47 | 97.86 |
| LR Model | 91.65 | 90.51 | 98.63 | 96.33 |
| LDA Model | 92.00 | 90.89 | 98.41 | 97.19 |
| KNN Model | 97.80 | 97.85 | 95.34 | 95.39 |
| DT Model | 95.70 | 95.60 | 97.34 | 96.77 |
| GNB Model | 96.50 | 96.56 | 98.15 | 96.40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rizwanullah, M.; Mengash, H.A.; Alamgeer, M.; Tarmissi, K.; Aziz, A.S.A.; Abdelmageed, A.A.; Alsaid, M.I.; Eldesouki, M.I. Modelling of Metaheuristics with Machine Learning-Enabled Cybersecurity in Unmanned Aerial Vehicles. Sustainability 2022, 14, 16741. https://doi.org/10.3390/su142416741
Rizwanullah M, Mengash HA, Alamgeer M, Tarmissi K, Aziz ASA, Abdelmageed AA, Alsaid MI, Eldesouki MI. Modelling of Metaheuristics with Machine Learning-Enabled Cybersecurity in Unmanned Aerial Vehicles. Sustainability. 2022; 14(24):16741. https://doi.org/10.3390/su142416741
Chicago/Turabian StyleRizwanullah, Mohammed, Hanan Abdullah Mengash, Mohammad Alamgeer, Khaled Tarmissi, Amira Sayed A. Aziz, Amgad Atta Abdelmageed, Mohamed Ibrahim Alsaid, and Mohamed I. Eldesouki. 2022. "Modelling of Metaheuristics with Machine Learning-Enabled Cybersecurity in Unmanned Aerial Vehicles" Sustainability 14, no. 24: 16741. https://doi.org/10.3390/su142416741
APA StyleRizwanullah, M., Mengash, H. A., Alamgeer, M., Tarmissi, K., Aziz, A. S. A., Abdelmageed, A. A., Alsaid, M. I., & Eldesouki, M. I. (2022). Modelling of Metaheuristics with Machine Learning-Enabled Cybersecurity in Unmanned Aerial Vehicles. Sustainability, 14(24), 16741. https://doi.org/10.3390/su142416741