
Forecasting Daytime Ground-Level Ozone Concentration in Urbanized Areas of Malaysia Using Predictive Models


 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
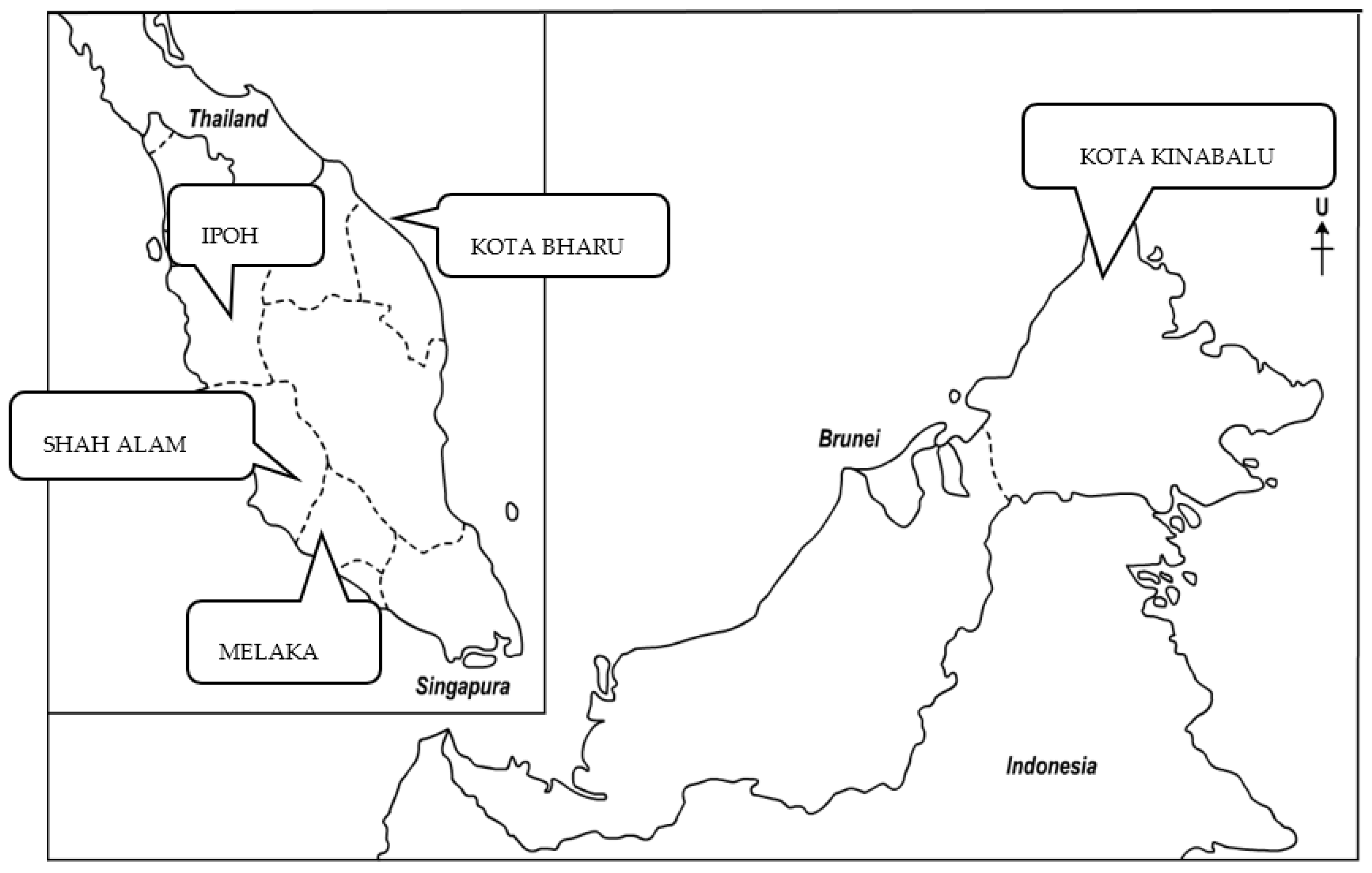
2.1. Study Area
2.2. Air Pollutant Dataset
2.3. Principle Component Analysis (PCA)
2.4. Prediction Model
2.4.1. Multiple Linear Regression (MLR)
2.4.2. Feed-Forward Artificial Neural Network Model (FFANN)
2.4.3. Radial Basis Function Artificial Neural Network (RBFANN)
2.4.4. Modified Models
2.5. Performance Indicators
3. Results
3.1. Principle Components Analysis (PCA)
3.2. Development of Ground-Level O3 Prediction Models and Their Performances
3.2.1. Multiple Linear Regression (MLR) and Its Modification (Principal Component Regression (PCR))
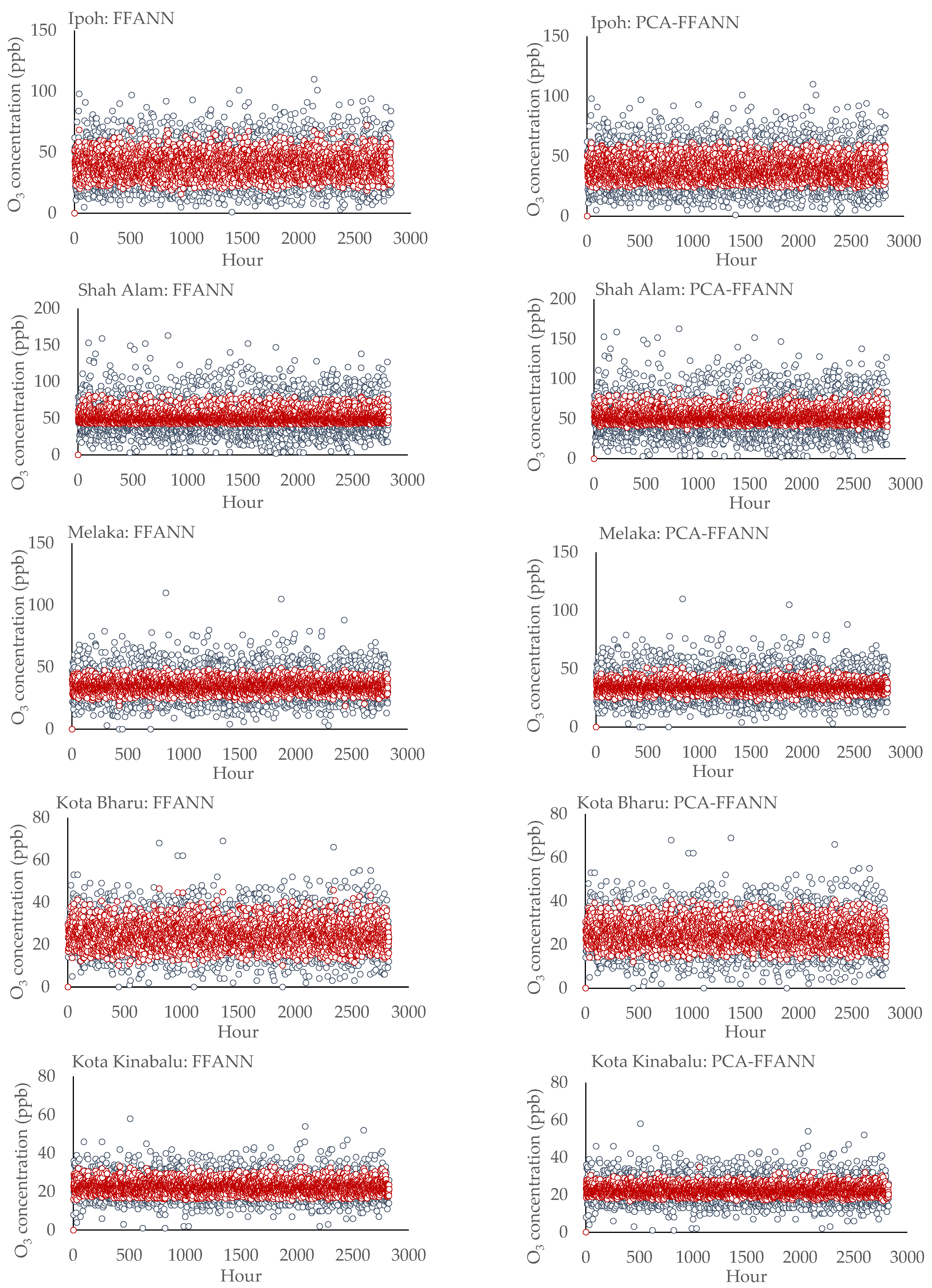
3.2.2. Artificial Neural Network (ANN) and Its Modification (PCA-FFANN)
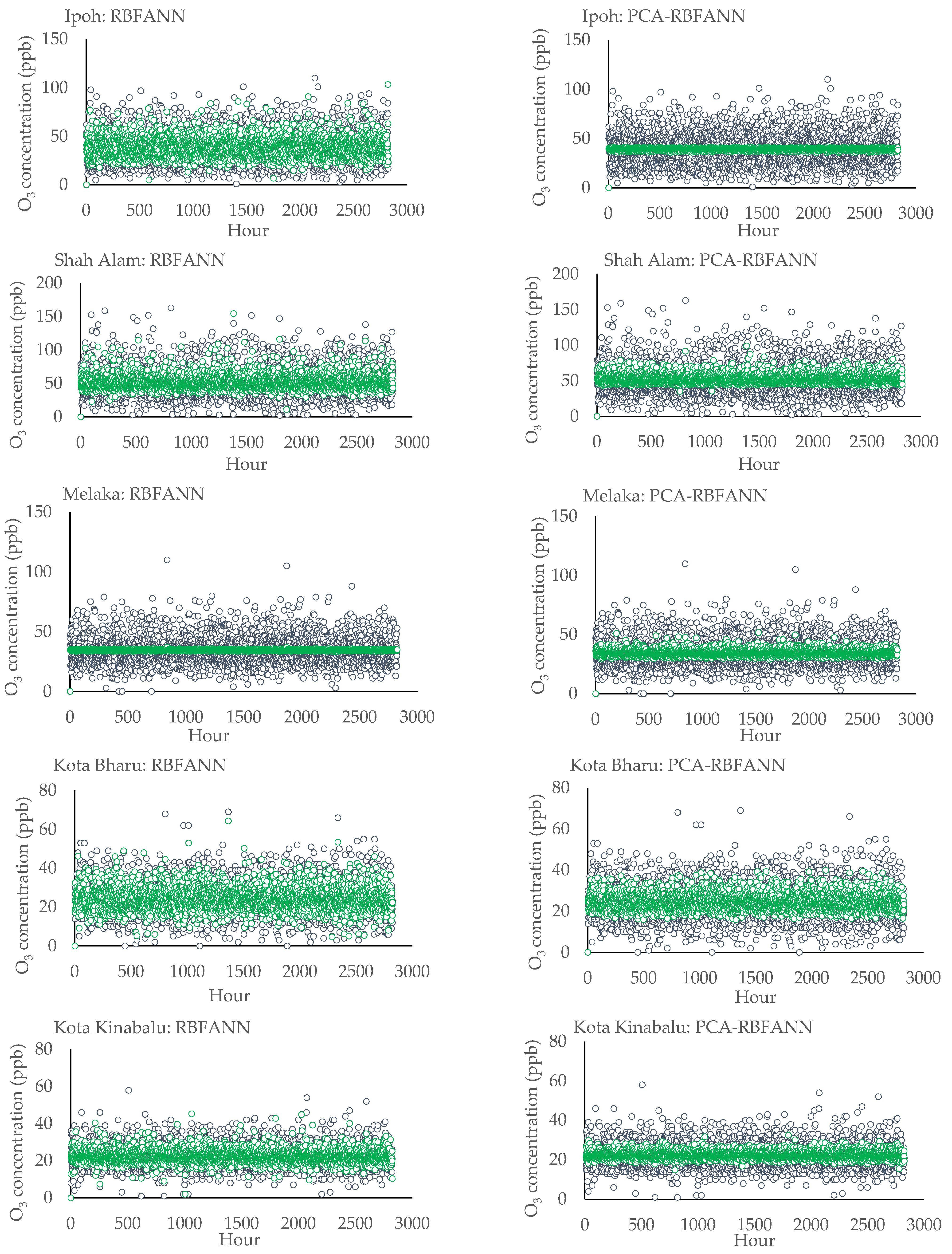
3.2.3. Radial Basis Functions (RBFANN) and Its Modification (PCA-RBFANN)
3.3. Summary
3.4. Deployment of the Best Selected Prediction Model of Ground-Level O3
4. Discussion
4.1. Performances of the Predictive Models (Basis Model)
4.2. Performances of the Modified Models
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Awang, N.R.; Elbayoumi, M.; Ramli, N.A.; Yahaya, A.S. Diurnal variations of ground-level ozone in three port cities in Malaysia. Air Qual. Atmos. Health 2015, 9, 25–39. [Google Scholar] [CrossRef]
- Yin, Y.; Fook, S.; Glasow, R.V. The influence of meteorological factors and biomass burning on surface ozone concentrations at Tanah Rata, Malaysia. Atmos. Environ. 2013, 70, 435–446. [Google Scholar]
- Tan, K.C.; Lim, H.S.; Zubir, M.; Jafri, M. Prediction of column ozone concentrations using multiple regression analysis and principal component analysis techniques: A case study in peninsular Malaysia. Atmos. Pollut. Res. 2016, 7, 533–546. [Google Scholar] [CrossRef]
- Faris, H.; Alkasassbeh, M.; Rodan, A. Artificial neural networks for surface ozone prediction: Models and analysis. Pol. J. Environ. Stud. 2014, 23, 341–348. [Google Scholar]
- Eum, J.; Kim, H. Effects on Air Pollution in Assaults: Finding from South Korea. Sustainability 2021, 13, 11545. [Google Scholar] [CrossRef]
- Department of Environment Malaysia. Environmental Quality Report 2018; Department of Environment Malaysia: Selangor, Malaysia, 2019; pp. 142–156. [Google Scholar]
- Teixeira, E.C.; de Santana, E.R.; Wiegand, F.; Fachel, J. Measurement of surface ozone and its precursors in an urban area in South Brazil. Atmos. Environ. 2009, 43, 2213–2220. [Google Scholar] [CrossRef]
- Al-Shammari, E.T. Towards an accurate ground-level ozone prediction. Int. J. Electr. Comput. Eng. 2018, 8, 1131–1139. [Google Scholar]
- Verma, N.; Kumari, S.; Lakhani, A.; Kumari, K.M. 24 Hour Advance Forecast of Surface Ozone Using Linear and Non-Linear Models at a Semi-Urban Site of Indo-Gangetic Plain. Int. J. Environ. Sci. Nat. Res. 2019, 18, 555982. [Google Scholar]
- Verma, N.; Satsangi, A.; Lakhani, A.; Kumari, K.M. Prediction of Ground level Ozone concentration in Ambient Air using Multiple Regression Analysis. J. Chem. Biol. Phys. Sci. 2015, 5, 3685–3696. [Google Scholar]
- Hassanzadeh, S.; Hosseinibalam, F.; Omidvari, M. Statistical methods and regression analysis of stratospheric ozone and meteorological variables in Isfahan. Phys. A Stat. Mech. Appl. 2008, 387, 2317–2327. [Google Scholar] [CrossRef]
- Barrero, M.A.; Grimalt, J.O.; Canto’n, L.M. Prediction of daily ozone concentration maxima in the urban atmosphere. Chemometr. Intell. Lab. Syst. 2006, 80, 67–76. [Google Scholar] [CrossRef]
- Banja, M.; Papanastasiou, D.K.; Poupkou, A.; Melas, D. Atmospheric Pollution Research Development of a short–term ozone prediction tool in Tirana area based on meteorological variables. Atmos. Pollut. Res. 2012, 3, 32–38. [Google Scholar] [CrossRef] [Green Version]
- Allu, S.K.; Srinivasan, S.; Maddala, R.K.; Reddy, A.; Anupoju, G.R. Seasonal ground level ozone prediction using multiple linear regression (MLR) model. Model. Earth Syst. Environ. 2020, 6, 1981–1989. [Google Scholar] [CrossRef]
- Azmi, S.T.; Latif, M.T.; Jemain, A.A. Trend and status of air quality at three different monitoring stations in the Klang Valley, Malaysia. Air Qual. Atmos. Health 2010, 3, 53–64. [Google Scholar] [CrossRef] [Green Version]
- Awang, M.B.; Jaafar, A.B.; Abdullah, A.M.; Ismail, M.B.; Hassan, M.N.; Abdullah, R.; Johan, S.; Noor, H. Air quality in Malaysia: Impacts, management issues and future challenges. Respirology 2000, 5, 183–196. [Google Scholar] [CrossRef] [PubMed]
- Ismail, M.; Abdullah, S.; Yuen, S.F.; Ghazali, N.A. A ten-year investigation on ozone and it precursors at Kemaman, Terengganu, Malaysia. EnvironmentAsia 2016, 9, 1–8. [Google Scholar]
- Ghazali, N.A.; Ramli, N.A.; Yahaya, A.S.; Yusof, N.F.F.M.; Sansuddin, N.; Al Madhoun, W.A. Transformation of nitrogen dioxide into ozone and prediction of ozone concentrations using multiple linear regression techniques. Environ. Monit. Assess. 2010, 165, 475–489. [Google Scholar] [CrossRef]
- Tong, W. Chapter 5-machine learning for spatiotemporal big data in air pollution. In Spatiotemporal Analysis of Air Pollution and its Application in Public Health; Li, L., Zhou, X., Tong, W., Eds.; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Dou, J.; Yunus, A.P.; Tien Bui, D.; Merghadi, A.; Sahana, M.; Zhu, Z.; Chen, C.-W.; Khosravi, K.; Yang, Y.; Pham, B.T. Assessment of advanced random forest and decision tree algorithms for modeling rainfall-induced landslide susceptibility in the Izu-Oshima Volcanic Island, Japan. Sci. Total Environ. 2019, 662, 332–346. [Google Scholar] [CrossRef]
- Ma, J.; Ding, Y.; Cheng, J.C.P.; Jiang, F.; Tan, Y.; Gan, V.J.L.; Wan, Z. Identification of high impact factors of air quality on a national scale using big data and machine learning techniques. J. Clean. Prod. 2020, 244, 118955. [Google Scholar] [CrossRef]
- Li, R.; Cui, L.; Meng, Y.; Zhao, Y.; Fu, H. Satellite-based prediction of daily SO2 exposure across China using a high-quality random forest-spatiotemporal Kriging (RF-STK) model for health risk assessment. Atmos. Environ. 2019, 208, 10–19. [Google Scholar] [CrossRef]
- Al-Alawi, S.M.; Abdul-Wahab, S.A.; Bakheit, C.S. Combining principal component regression and artificial neural networks for more accurate predictions of ground-level ozone. Environ. Model. Softw. 2008, 23, 396–403. [Google Scholar] [CrossRef]
- Padma, K.; Samuel Selvaraj, R.; Arputharaj, S.; Milton Boaz, B. Improved Artificial Neural Network Performance on Surface Ozone Prediction Using Principal Component Analysis. Int. J. Curr. Res. Rev. 2018, 6, 1–6. [Google Scholar]
- Pawlak, I.; Jarosławski, J. Forecasting of surface ozone concentration by using artificial neural networks in rural and urban areas in central Poland. Atmosphere 2019, 10, 52. [Google Scholar] [CrossRef] [Green Version]
- Aljanabi, M.; Shkoukani, M.; Hijjawi, M. Ground-level Ozone Prediction Using Machine Learning Techniques: A Case Ground-level Ozone Prediction Using Machine Learning Techniques: A Case Study in Amman, Jordan. Int. J. Autom. Comput. 2020, 17, 667–677. [Google Scholar] [CrossRef]
- Castro, M.; Pires, J.C.M. Decision support tool to improve the spatial distribution of air quality monitoring sites. Atmos. Pollut. Res. 2019, 10, 827–834. [Google Scholar] [CrossRef]
- Zhang, Y.-F.; Fitch, P.; Thorburn, P.J. Predicting the Trend of Dissolved Oxygen Based on the kPCA-RNN Model. Water 2020, 12, 585. [Google Scholar] [CrossRef] [Green Version]
- Banadkooki, F.B.; Ehteram, M.; Ahmed, A.N.; Fai, C.M.; Afan, H.A.; Ridwam, W.M.; Sefelnasr, A.; El-Shafie, A. Precipitation forecasting using multilayer neural Network and support vector machine optimization based on flow regime algorithm taking into Account uncertainties of soft computing models. Sustainability 2019, 11, 6681. [Google Scholar] [CrossRef] [Green Version]
- Ehteram, M.; Ahmed, A.N.; Ling, L.; Fai, C.M.; Latif, S.D.; Afan, H.A.; Banadkooki, F.B.; El-Shafie, A. Pipeline scour rates prediction-based model utilizing a multilayer perceptron colliding body algorithm. Water 2020, 12, 902. [Google Scholar] [CrossRef] [Green Version]
- Ul–Saufie, A.Z.; Yahaya, A.S.; Ramli, N.A.; Rosaida, N.; Hamid, H.A. Future daily PM10 concentrations prediction by combining regression models and feedforward backpropagation models with principle component analysis (PCA). Atmos. Environ. 2013, 77, 621–630. [Google Scholar] [CrossRef]
- Hashim, N.I.M.; Noor, N.M.; Annas, S. Influence of meteorological factors on variations of particulate matter (PM10) concentration during haze episodes in Malaysia. In AIP Conference Proceedings; AIP Publishing LLC: New York, NY, USA, 2018; Volume 2045. [Google Scholar]
- Thupeng, W.M.; Mothupi, T.; Mokgweetsi, B.; Mashabe, B.; Sediadie, T. A Principal Component Regression Model, For Forecasting Daily Peak Ambient Ground Level Ozone Concentrations, in The Presence Of Multicollinearity Amongst Precursor Air Pollutants And Local Meteorological Conditions: A Case Study Of Maun. Int. J. Appl. Math. Stat. Sci. 2018, 7, 1–12. [Google Scholar]
- Ismail, M.; Abdullah, S.; Jaafar, A.D.; Ibrahim, T.A.E.; Shukor, M.S.M. Statistical modeling approaches for PM10 forecasting at industrial areas of Malaysia. AIP Conf. Proc. 2018, 2020, 020044. [Google Scholar]
- Taspinar, F. Improving artificial neural network model predictions of daily average PM10 concentrations by applying principle component analysis and implementing seasonal models. J. Air Waste Manag. Assoc. 2015, 65, 800–809. [Google Scholar] [CrossRef] [PubMed]
- Bekesiene, S.; Meidute-kavaliauskiene, I. Accurate Prediction of Concentration Changes in Ozone as an Air Pollutant by Multiple Linear Regression and Artificial Neural Networks. Mathematics 2021, 9, 356. [Google Scholar] [CrossRef]
- Lu, W.-Z.; Wang, W.-J.; Wang, X.-K.; Yan, S.-H.; Lam, J.C. Potential assessment of a neural model PCA/RBF approach for forecasting pollution trends in Mongkok urban air, Hong Kong. Environ. Res. 2004, 96, 79–87. [Google Scholar] [CrossRef] [PubMed]
- Tikhamarine; Yazid; Souag-Gamane, D.; Najah Ahmed, A.; Kisi, O.; El-Shafie, A. Improving artificial intelligence models accuracy for monthly streamflow forecasting using grey Wolf optimization (GWO) algorithm. J. Hydrol. 2020, 582, 124435. [Google Scholar] [CrossRef]
- Abobakr Yahya, A.S.; Ahmed, A.N.; Othman, F.B.; Ibrahim, R.K.; Afan, H.A.; El-Shafie, A.; Fai, C.M.; Hossain, M.S.; Ehteram, M.; Elshafie, A. Water quality prediction model based support vector machine model for ungauged river catchment under dual scenarios. Water 2019, 11, 1231. [Google Scholar] [CrossRef] [Green Version]
- Balogun, A.-L.; Tella, A. Modelling and investigating the impacts of climatic variables on ozone concentration in Malaysia using correlation analysis with random forest, decision tree regression, linear regression, and support vector regression. Chemosphere 2022, 299, 134250. [Google Scholar] [CrossRef]
- Ayman, Y.; AlDahoul, N.; Birima, A.H.; Ahmed, A.N.; Sherif, M.; Sefelnasr, A.; Allawi, M.F.; Elshafie, A. Comprehensive comparison of various machine learning algorithms for short-term ozone concentration prediction. Alex. Eng. J. 2022, 61, 4607–4622. [Google Scholar]
- Kaiser, H.F. An index of factorial simplicity. Psychometrika 1974, 39, 31–36. [Google Scholar] [CrossRef]
- Brūmelis, G.; Brown, D.H.; Nikodemus, O.; Tjarve, D. The monitoring and risk assessment of Zn deposition around metal smelter in Latvia. Environ. Monit. Assess. 1999, 58, 201–212. [Google Scholar] [CrossRef]
- Juahir, H.; Zain, S.M.; Yusoff, M.K.; Tengku Hanidza, T.I.; Mohd Armi, A.S.; Toriman, M.E.; Mokhtar, M. Spatial water quality assessment of Langat River Basin (Malaysia) using environmetric techniques. Environ. Monit. Assess. 2011, 173, 625–641. [Google Scholar] [CrossRef] [Green Version]
- Azid, A.; Juahir, H.; Latif, M.T.; Zain, S.M. Feed-Forward Artificial Neural Network Model for Air Pollutant Index Prediction in the Southern Region of Peninsular Malaysia. J. Environ. Prot. Sci. 2013, 4, 40509. [Google Scholar] [CrossRef]
- Azid, A.; Juahir, H.; Toriman, M.E.; Kamarudin, M.K.A.; Saudi, A.S.M.; Hasnam, C.N.C.; Aziz, N.A.A.; Azaman, F.; Latif, M.T.; Zainuddin, S.F.M.; et al. Prediction of the Level of Air Pollution Using Principal Component Analysis and Artificial Neural Network Techniques: A Case Study in Malaysia. Water Air Soil. Pollut. 2014, 225, 2063. [Google Scholar] [CrossRef]
- Abdullah, S.; Mohd Napi, N.N.L.; Ahmed, A.N.; Wan Mansor, W.N.; Abu Mansor, A.; Ismail, M.; Abdullah, A.M.; Ramly, Z.T.A. Development of Multiple Linear Regression for Particulate Matter (PM10) Forecasting during Episodic Transboundary Haze Event in Malaysia. Atmosphere 2020, 11, 289. [Google Scholar] [CrossRef] [Green Version]
- Sun, G.; Hoff, S.J.; Zelle, B.C.; Nelson, M.A. Development and Comparison of Backpropagation and Generalized Regression Neural Network Models to Predict Diurnal and Seasonal Gas and PM10 Concentrations and Emissions from Swine Buildings. Trans. Am. Soc. Agric. Biol. Eng. 2008, 51, 685–694. [Google Scholar]
- Gvozdic, V.; Kovac-Andric, E.; Brana, J. Influence of meteorological factors NO2, SO2, CO and PM10 on the concentration of O3 in the urban atmosphere of Eastern Croatia. Environ. Model. Assess. 2011, 16, 491–501. [Google Scholar] [CrossRef]
- Ahmat, H.; Yahaya, A.S.; Ramli, N.A. PM10 Analysis for Three Industrialized Areas using Extreme Value. Sains Malays. 2015, 44, 175–185. [Google Scholar] [CrossRef]
- Ghazali, N.A.; Yahaya, A.S.; Mokhtar, M.I.Z. Predicting Ozone Concentrations Levels Using Probability Distributions. ARPN J. Eng. Appl. Sci. 2014, 9, 2089–2094. [Google Scholar]
- Ul-Saufie, A.Z.; Yahaya, A.S.; Ramli, N.A.; Hamid, H.A. Performance of Multiple Linear Regression Model for Longterm PM10 Concentration Prediction based on Gasesous and Meteorological Parameters. J. Appl. Sci. 2012, 12, 1488–1494. [Google Scholar] [CrossRef]
- Abdullah, S.; Ismail, M.; Ahmed, A.N. Multi-layer perceptron model for air quality prediction. Malays. J. Math. Sci. 2019, 13, 85–95. [Google Scholar]
- Kumar, N.; Middey, A.; Rao, P.S. Prediction and examination of seasonal variation of ozone with meteorological parameter through artificial neural network at NEERI, Nagpur, India. Urban Clim. 2017, 20, 148–167. [Google Scholar] [CrossRef]
- Abdullah, A.; Ismail, M.; Fong, S.Y. Multiple Linear Regression (MLR) Models for Long Term PM10 Concentration Forecasting During Different Monsoon Seasons. J. Sustain. Sci. Manag. 2017, 12, 60–69. [Google Scholar]
- Hair, J.F.; Anderson, R.E.; Tatham, R.L.; Black, W.C. Multivariate Data Analysis with Reading, 4th ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Elbayoumi, M.; Yahaya, A.S.; Ramli, N.A.; Noor Md Yusof, N.F.F.; Al Madhoun, W.; Ul-Saufie, A.Z. Multivariate methods for indoor PM10 and PM2.5 modelling in naturally ventilated schools buildings. Atmos. Environ. 2014, 94, 11–21. [Google Scholar] [CrossRef]
- Ozbay, B.; Keskin, G.A.; Dogruparmak, S.C.; Ayberk, S. Multivariate methodsforground level ozone modeling. Atmos. Res. 2011, 102, 57–65. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Monitoring Site | Latitude, Longitude | Area Description |
|---|---|---|---|
| North | Ipoh | N 4.6305, E 101.1178 | Urban area Residential area |
| Center | Shah Alam | N 3.1066, E 101.5573 | Urban area Residential area Near industrial area |
| South | Melaka | N 2.1919, E 102.2545 | Urban area Residential area Near industrial area |
| East Peninsular | Kota Bharu | N 6.1464, E 102.2481 | Urban area Residential area |
| East Malaysia | Kota Kinabalu | N 5.9532, E 116.0551 | Urban area Residential area |
| Air Pollutant/Weather Parameters | Unit |
|---|---|
| Ground-level ozone (O3) | ppb |
| Nitrogen dioxide (NO2) | ppm |
| Carbon monoxide (CO) | ppm |
| Sulphur dioxide (SO2) | ppm |
| Particulate matter (PM10) | (µg/m3) |
| Non-methane Hydrocarbon (NmHc) | ppm |
| Ambient temperature (T) | °C |
| Humidity (H) | % |
| Wind speed (WS) | km/h |
| Wind direction (WD) | degree (o) |
| Ultraviolet radiation (UVB) | W/m2 |
| Area/Parameter | Ipoh | Shah Alam | Melaka | Kota Bharu | Kota Kinabalu |
|---|---|---|---|---|---|
| Wind Speed (km/h) | 9.18 ± 2.71 | 8.75 ± 2.26 | 8.70 ± 2.77 | 8.47 ± 3.33 | 8.73 ± 2.26 |
| Temperature (°C) | 33.39 ± 2.36 | 32.81 ± 2.47 | 31.60 ± 1.74 | 30.78 ± 79.55 | 31.59 ± 2.31 |
| Solar Radiation (W/m2) | 677.27 ± 183.81 | 533.16 ± 191.70 | Not Available | 553.42 ± 215.86 | 668.93 ± 7.98 |
| Humidity (%) | 56.88 ± 8.66 | 59.37 ± 9.74 | 61.87 ± 8.50 | 63.26 ± 10.24 | 68.93 ± 7.98 |
| NmHC (ppm) | 0.13 ± 0.056 | 0.22 ± 0.12 | Not Available | 0.20 ± 0.11 | Not Available |
| SO2 (ppm) | 0.0018 ± 0.0012 | 0.0038 ± 0.0037 | 0.0022 ± 0.0021 | 0.00064 ± 0.0010 | 0.00055 ± 0.00070 |
| NO2 (ppm) | 0.0093 ± 0.0039 | 0.012 ± 0.0074 | 0.0043 ± 0.0021 | 0.0054 ± 0.0035 | 0.0022 ± 0.0019 |
| CO (ppm) | 0.43 ± 0.19 | 0.51 ± 0.34 | 0.32 ± 0.19 | 0.46 ± 0.22 | 0.23 ± 0.12 |
| PM10 (µg/m3) | 43.96 ± 19.17 | 47.23 ± 32.21 | 34.98 ± 21.25 | 35.62 ± 13.55 | 29.55 ± 12.56 |
| O3 (ppb) | 27 ± 6.1 | 31 ± 7.6 | 20 ± 6.5 | 18 ± 5.6 | 15 ± 3.9 |
| Area/Parameter | Ipoh | Shah Alam | Melaka | Kota Bharu | Kota Kinabalu |
|---|---|---|---|---|---|
| Wind Speed (km/h) | 8.38 ± 3.19 | 8.14 ± 2.81 | 8.62 ± 2.94 | 7.98 ± 3.35 | 8.82 ± 2.37 |
| Temperature (°C) | 33.37 ± 2.62 | 32.81 ± 2.63 | 31.46 ± 1.89 | 30.58 ± 2.54 | 31.97 ± 2.38 |
| Solar Radiation (W/m2) | 742.25 ± 195.66 | 592.80 ± 187.38 | Not Available | 596.79 ± 197.86 | 619.79 ± 192.54 |
| Humidity (%) | 57.67 ± 8.94 | 59.35 ± 9.99 | 62.31 ± 9.10 | 63.87 ± 11.03 | 67.64 ± 7.96 |
| NmHC (ppm) | 0.13 ± 0.06 | 0.24 ±0.12 | Not Available | 0.19 ± 0.09 | Not Available |
| SO2 (ppm) | 0.0019 ± 0.0015 | 0.0037 ± 0.004 | 0.0021 ± 0.0026 | 0.0057 ± 0.001 | 0.005 ± 0.007 |
| NO2 (ppm) | 0.0094 ± 0.0051 | 0.012 ± 0.0089 | 0.0044 ± 0.0026 | 0.005 ± 0.0038 | 0.0021 ± 0.019 |
| CO (ppm) | 0.416 ± 0.202 | 0. 535 ± 0.348 | 0.328 ± 0.193 | 0.443 ± 0.233 | 0.234 ± 0.128 |
| PM10 (µg/m3) | 45.12 ± 22.66 | 47.34 ± 32.27 | 35.02 ± 22.10 | 36.35 ± 17.18 | 29.90 ± 15.37 |
| O3 (ppb) | 39 ± 16.0 | 52 ± 32.0 | 34 ± 11.0 | 24 ± 9.0 | 22 ± 6.0 |
| Station | Kolmogorov-Smirnov a | ||
|---|---|---|---|
| Statistics | df | p-Value | |
| Ipoh | 0.163 | 14,124 | 0.200 |
| Shah Alam | 0.142 | 14,124 | 0.200 |
| Melaka | 0.154 | 14,124 | 0.200 |
| Kota Bharu | 0.170 | 14,124 | 0.200 |
| Kota Kinabalu | 0.168 | 14,124 | 0.200 |
| Performance Index | Equation | Description | |
|---|---|---|---|
| Mean Absolute Error (MAE) | (5) | Value close to zero indicates better method. | |
| Root Mean Squared Error (RMSE) | (6) | Value closer to zero indicates better method. | |
| Coefficient of determination (R2) | (7) | Value closer to one indicates better method. | |
| Index of Agreement | (8) | Value close to one indicates better method. |
| Station | KMO Measure of Sampling Adequacy | Bartlett’s Test of Sphericity | |
|---|---|---|---|
| Approximate Chi-Square | p-Value | ||
| Ipoh | 0.700 | 54,319 | <0.000 |
| Shah Alam | 0.716 | 68,026 | <0.000 |
| Melaka | 0.575 | 42,357 | <0.000 |
| Kota Bharu | 0.709 | 73,029 | <0.000 |
| Kota Kinabalu | 0.664 | 37,185 | <0.000 |
| Component | Station | Initial Eigenvalues | ||
|---|---|---|---|---|
| Total | Variance (%) | Cumulative (%) | ||
| 1 | Ipoh | 2.752 | 27.520 | 27.520 |
| 2 | 2.665 | 26.646 | 54.166 | |
| 3 | 1.248 | 12.483 | 66.649 | |
| 1 | Shah Alam | 3.221 | 32.209 | 32.209 |
| 2 | 2.607 | 26.074 | 58.283 | |
| 3 | 1.058 | 10.579 | 68.862 | |
| 1 | Melaka | 2.352 | 29.395 | 29.395 |
| 2 | 2.028 | 25.350 | 54.746 | |
| 3 | 1.212 | 15.146 | 69.891 | |
| 1 | Kota Bharu | 3.587 | 35.866 | 35.866 |
| 2 | 1.980 | 19.800 | 55.666 | |
| 3 | 1.105 | 11.051 | 66.717 | |
| 4 | 1.025 | 10.251 | 76.969 | |
| 1 | Kota Kinabalu | 2.775 | 30.838 | 30.838 |
| 2 | 1.800 | 20.004 | 50.843 | |
| 3 | 1.232 | 13.692 | 64.535 | |
| Area | Principle Components (PCs) | Sub-Model |
|---|---|---|
| Ipoh | PC1 | 0.781PM10 + 0.760CO + 0.739NO2 + 0.713NmHC |
| PC2 | −0.934H + 0.871T + 0.772UVB | |
| PC3 | 0.819 WS | |
| Shah Alam | PC1 | 0.928T − 0.923H + 0.735UVB + 0.717O3 |
| PC2 | 0.824PM10 + 0.812CO | |
| PC3 | −0.883WS | |
| Melaka | PC1 | 0.924T − 0.896H |
| PC2 | 0.880CO + 0.875PM10 | |
| PC3 | 0.907SO2 | |
| Kota Bharu | PC1 | 0.929T − 0.923H + 0.852NmHC |
| PC2 | 0.815NmHC + 0.806NO2 + 0.774CO | |
| PC3 | 0.855O3 + 0.735PM10 | |
| PC4 | 0.903WS | |
| Kota Kinabalu | PC1 | 0.900T + 0.855UVB − 0.824H |
| PC2 | 0.809PM10 + 0.758CO |
| Location | Method | Models | Range of VIF |
|---|---|---|---|
| Ipoh | MLR | O3+1 = 61.914 + (0.001 CO) − (0.387 Humidity) − (1.923 NmHC) + (0.341 NO2) + (0.41 O3) − (0.003 PM10) − (0.454 SO2) − (0.657 Temperature) − (0.002 UVB) + (0.568 Wind Speed) | 1.147–4.170 |
| PCR | O3+1 = 12.564 + (0.067 PC1) + (0.072 PC2) + (1.021 PC3) | 1.027–1.062 | |
| Shah Alam | MLR | O3+1 = 109.995 + (0.002 CO) − (0.404 Humidity) − (0.00001392 NmHC) + (0.07 NO2) + (0.351 O3) − (0.001 PM10) − (0.048 SO2) − (1.727 Temperature) + (0.002 UVB) + (0.21 Wind Speed) | 1.227–4.373 |
| PCR | O3+1 = 52.582 + (0.002 PC1) + (0.000 PC2) − (0.012 PC3) | 1.062–1.151 | |
| Melaka | MLR | O3+1 = 11.902 − (0.001 CO) + (0.033 Humidity) + (0.35 NO2) + (0.337 O3) + (0.022 PM10) − (0.148 SO2) + (0.252 Temperature) − (0.07 Wind Speed) | 1.066–4.364 |
| PCR | O3+1 = 23.715 + (0.105 PC1) + (0.003 PC2) − (1.031 PC3) | 1.032–1.061 | |
| Kota Bharu | MLR | O3+1 = 14.267 − (0.002 CO) − (0.027 Humidity) − (0.004 NmHC) + (0.127 NO2) + (0.617 O3) + (0.1 PM10) + (0.188 SO2) − (0.146 Temperature) − (0.022 Wind Speed) | 1.141–5.751 |
| PCR | O3+1 = 10.296 + (0.001 PC1) − (0.005 PC2) + (0.464 PC3) − (0.130 PC4) | 1.047–1.259 | |
| Kota Kinabalu | MLR | O3+1 = 14.267 + (0.002 CO) − (0.027 Humidity) − (0.004 NmHC) + (0.127 NO2) + (0.617 O3) + (0.1 PM10) + (0.188 SO2) − (0.146 Temperature) − (0.022 Wind Speed) | 1.153–2.799 |
| PCR | O3+1 = 16.655 − (0.013 PC1) + (0.028 PC2) − (0.333 PC3)11 | 1.052–1.205 |
| Location | Method | MAE | RMSE | IA | R2 |
|---|---|---|---|---|---|
| Ipoh | MLR | 7.055 | 8.901 | 0.874 | 0.887 |
| PCR | 8.355 | 10.692 | 0.806 | 0.694 | |
| Shah Alam | MLR | 11.59 | 15.053 | 0.757 | 0.903 |
| PCR | 13.92 | 18.482 | 0.563 | 0.531 | |
| Melaka | MLR | 5.855 | 7.737 | 0.772 | 0.952 |
| PCR | 6.969 | 9.17 | 0.636 | 0.672 | |
| Kota Bharu | MLR | 2.684 | 3.373 | 0.949 | 0.944 |
| PCR | 3.731 | 4.885 | 0.870 | 0.800 | |
| Kota Kinabalu | MLR | 3.119 | 3.779 | 0.884 | 0.866 |
| PCR | 3.597 | 4.794 | 0.658 | 0.531 |
| Location | Method | No. of Neuron | MAE | RMSE | IA | R2 |
|---|---|---|---|---|---|---|
| Ipoh | FFANN | 2 | 6.937 | 9.071 | 0.871 | 0.839 |
| PCA-FFANN | 2 | 8.402 | 10.693 | 0.804 | 0.706 | |
| Shah Alam | FFANN | 2 | 12.090 | 15.677 | 0.729 | 0.846 |
| PCA-FFANN | 6 | 13.233 | 17.534 | 0.638 | 0.576 | |
| Melaka | FFANN | 2 | 5.599 | 7.850 | 0.769 | 0.853 |
| PCA-FFANN | 6 | 6.438 | 8.816 | 0.684 | 0.647 | |
| Kota Bharu | FFANN | 2 | 2.449 | 3.519 | 0.940 | 0.949 |
| PCA-FFANN | 4 | 3.708 | 4.918 | 0.870 | 0.771 | |
| Kota Kinabalu | FFANN | 8 | 2.619 | 3.579 | 0.841 | 0.691 |
| PCA-FFANN | 4 | 3.583 | 4.779 | 0.658 | 0.540 |
| Location | Method | Smoothness Function (σ) | MAE | RMSE | IA | R2 |
|---|---|---|---|---|---|---|
| Ipoh | RBFANN | 0.2 | 8.675 | 11.118 | 0.770 | 0.558 |
| PCA-RBFANN | 0.1 | 9.148 | 11.640 | 0.746 | 0.587 | |
| Shah Alam | RBFANN | 0.1 | 12.049 | 16.418 | 0.741 | 0.531 |
| PCA-RBFANN | 0.1 | 13.941 | 18.422 | 0.567 | 0.539 | |
| Melaka | RBFANN | 0.1 | 6.247 | 8.620 | 0.710 | 0.852 |
| PCA-RBFANN | 0.1 | 7.577 | 9.977 | 0.506 | 0.649 | |
| Kota Bharu | RBFANN | 0.1 | 3.173 | 4.579 | 0.899 | 0.775 |
| PCA-RBFANN | 0.1 | 4.316 | 5.690 | 0.791 | 0.771 | |
| Kota Kinabalu | RBFANN | 0.1 | 3.036 | 4.292 | 0.783 | 0.379 |
| PCA-RBFANN | 0.1 | 3.774 | 4.990 | 0.587 | 0.483 |
| Model | Performance Indicators | |||
|---|---|---|---|---|
| MAE | RMSE | IA | R2 | |
| MLR | 6.061 | 7.769 | 0.847 | 0.905 |
| PCR | 7.314 | 9.605 | 0.707 | 0.648 |
| FFANN | 5.939 | 7.937 | 0.830 | 0.877 |
| PCA-FFANN | 7.073 | 9.348 | 0.731 | 0.641 |
| RBFANN | 6.636 | 9.009 | 0.781 | 0.619 |
| PCA-RBFANN | 7.751 | 10.144 | 0.639 | 0.606 |
| Area/Performance | MAE | RMSE | IA | R2 |
|---|---|---|---|---|
| Ipoh | 8.030 | 10.815 | 0.759 | 0.887 |
| Shah Alam | 11.470 | 14.678 | 0.736 | 0.903 |
| Melaka | 9.263 | 12.331 | 0.744 | 0.952 |
| Kota Bharu | 2.363 | 3.208 | 0.951 | 0.944 |
| Kota Kinabalu | 2.447 | 3.197 | 0.928 | 0.866 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashim, N.M.; Noor, N.M.; Ul-Saufie, A.Z.; Sandu, A.V.; Vizureanu, P.; Deák, G.; Kheimi, M. Forecasting Daytime Ground-Level Ozone Concentration in Urbanized Areas of Malaysia Using Predictive Models. Sustainability 2022, 14, 7936. https://doi.org/10.3390/su14137936
Hashim NM, Noor NM, Ul-Saufie AZ, Sandu AV, Vizureanu P, Deák G, Kheimi M. Forecasting Daytime Ground-Level Ozone Concentration in Urbanized Areas of Malaysia Using Predictive Models. Sustainability. 2022; 14(13):7936. https://doi.org/10.3390/su14137936
Chicago/Turabian StyleHashim, NurIzzah M., Norazian Mohamed Noor, Ahmad Zia Ul-Saufie, Andrei Victor Sandu, Petrica Vizureanu, György Deák, and Marwan Kheimi. 2022. "Forecasting Daytime Ground-Level Ozone Concentration in Urbanized Areas of Malaysia Using Predictive Models" Sustainability 14, no. 13: 7936. https://doi.org/10.3390/su14137936
APA StyleHashim, N. M., Noor, N. M., Ul-Saufie, A. Z., Sandu, A. V., Vizureanu, P., Deák, G., & Kheimi, M. (2022). Forecasting Daytime Ground-Level Ozone Concentration in Urbanized Areas of Malaysia Using Predictive Models. Sustainability, 14(13), 7936. https://doi.org/10.3390/su14137936