
Improvement of Road Safety through Appropriate Cargo Securing Using Outliers


Abstract
1. Introduction
2. Literature Review
3. Materials and Methods
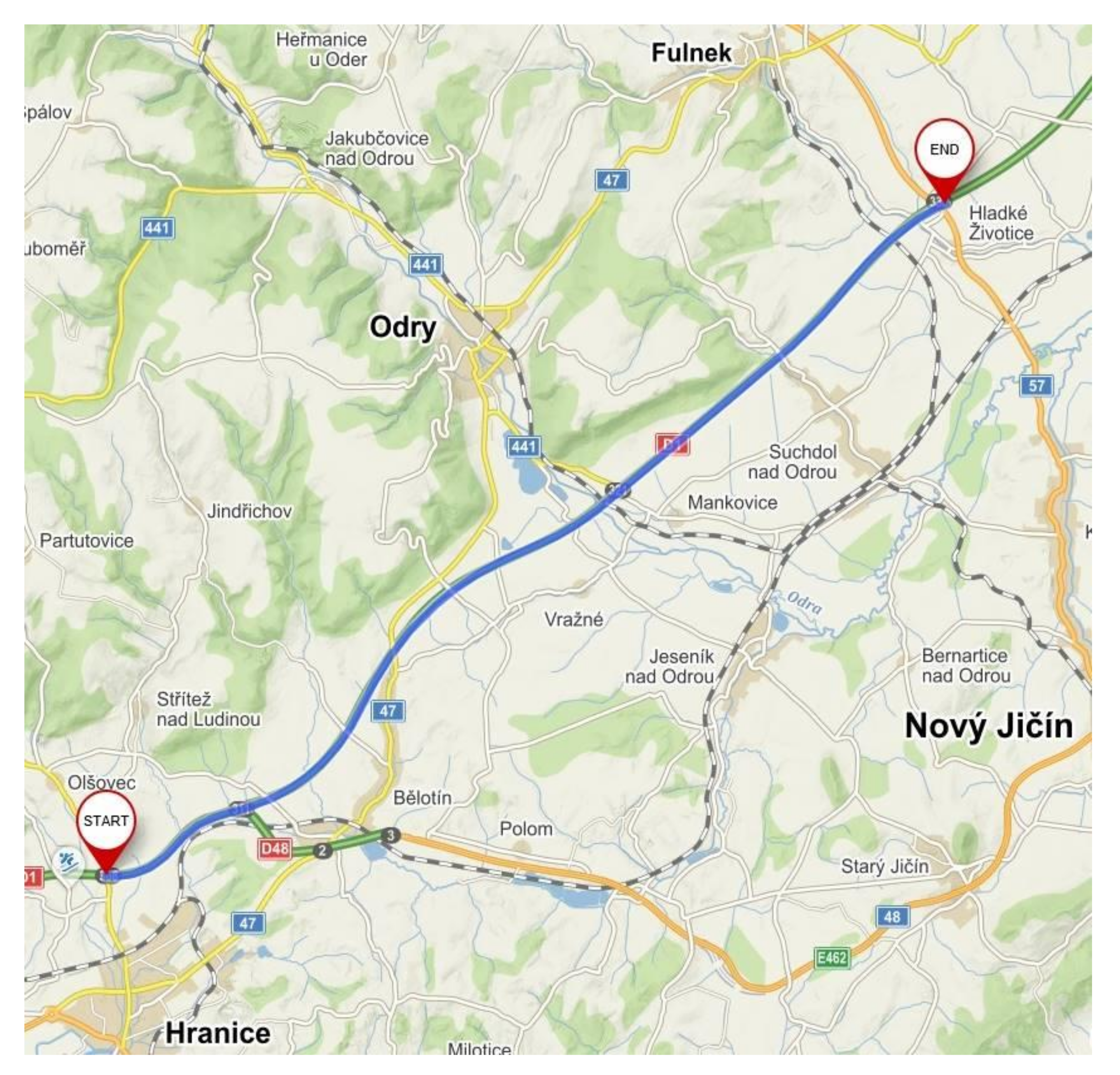
3.1. Transport Experiment–Measured Data
3.2. Methods
3.3. Hypotheses
4. Results
4.1. Results H1
4.2. Results H2
4.3. Results H3
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ministry of Transport of the Czech Republic. Transport Yearbook. 2018. Available online: https://www.sydos.cz/cs/rocenka-2018/rocenka/htm_cz/cz18_621000.html (accessed on 20 October 2020).
- Calvo-Poyo, F.; Navarro-Moreno, J.; de Oña, J. Road Investment and Traffic Safety: An International Study. Sustainability 2020, 12, 6332. [Google Scholar] [CrossRef]
- Police of the Czech Republic. Accident Statistics 2018. Available online: https://www.policie.cz/clanek/statistika-nehodovosti-900835.aspx?q=Y2hudW09Mg%3d%3d (accessed on 22 October 2020).
- European Commision—Directorate-General for Energy and Transport. European Best Practice Guidelines on Cargo Securing for Road Transport. Available online: www.uirr.com/fr/component/downloads/downloads/302.html (accessed on 22 October 2020).
- Vlkovský, M. A Comparison of Cargo Securing on Laden/Unladen Container Trucks. Int. J. Log. Syst. Manag. 2021, 67, 1015–1023. [Google Scholar]
- Vlkovsky, M.; Binar, T.; Svarc, J.; Nemec, P.; Bucsuhazy, K. Impact of Shocks on Cargo Securing during the Road Transport. In IOP Conference Series: Materials Science and Engineering—Proceedings of the 4th World Multidisciplinary Civil Engineering, Architecture and Urban Planning Symposium; IOP Publishing Ltd: Prague, Czech Republic, 2019. [Google Scholar]
- EN 12195-1. Load Restraining on Road Vehicles—Safety—Part 1: Calculation of Securing Forces; European Committee for Standardization: Brussel, Belgium, 2010.
- Nieoczym, A.; Caban, J.; Vrábel, J. The Problem of Proper Cargo Securing in Road Transport—Case Study. Transport Research Procedia. In Proceedings of the 13th International Scientific Conference on Sustainable, Modern and Safe Transport, Nový Smokovec, Slovakia, 29–31 May 2019. [Google Scholar]
- Grzesica, D. Measurement and Analysis of Truck Vibrations during Off-Road Transportation. In Proceedings of the 14th International Conference on Vibration Engineering and Technology of Machinery, Lisbon, Portugal, 10–13 September 2018. [Google Scholar]
- Cieśla, M.; Hat-Garncarz, G. The Problem of Proper Cargo Securing in Road Transport—Case Study. Transp. Prob. 2013, 8, 27–33. [Google Scholar]
- EN 12640 (F draft). Securing of Cargo on Road Vehicles—Lashing Points on Commercial Vehicles for Goods Transportation—Minimum Requirements and Testing; European Committee for Standardization: Brussel, Belgium, 2019.
- United Nations Economic Commission for Europe. IMO/ILO/UNECE Code of Practice for Packing of Cargo Transport Units (CTU Code). Available online: https://www.unece.org/fileadmin/DAM/trans/doc/2014/wp24/CTU_Code_January_2014.pdf (accessed on 28 October 2020).
- VDI 2700. Securing of Loads on Road Vehicles—Securing of Skips on Skip Loader Vehicles and their Trailers; Verlag: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Lerher, T. Cargo Securing in Road Transport Using Restraining Method with Top-Over Lashing; Nova Science Publishers: New York, NY, USA, 2015; ISBN 978-1-61122-002-5. [Google Scholar]
- Grossmann, G.; Kassmann, M. Transportsichere Verpackung und Ladungssicherung, 3rd ed.; Expert Verlag: Renningen, Germany, 2018; ISBN 978-3-8169-3334-2. [Google Scholar]
- Galor, W.; Galor, A.; Jóźwiak, Z.; Wiśnicki, B.; Woś, K.; Galor, P. Carriage and Securing of Oversize Cargo in Transport; Akademia Morska: Szczecin, Poland, 2011; ISBN 978-83-899901-59-0. [Google Scholar]
- Jagelčák, J. Equation of the standard EN 12195-1 Stipulates Unreasonable Demands for Cargo Securing. Communications 2007, 9, 30–33. [Google Scholar]
- Jagelčák, J.; Vrábel, J.; Nieuwesteeg, M. Draft for Revision of the Standards EN 12640 and EN 12641 Regarding the Securing of Cargo on Road Means of Transport. LOGI Sci. J. Transp. Log. 2017, 8, 41–46. [Google Scholar] [CrossRef][Green Version]
- Bańka, M.; Droździel, P.; Nieoczym, A. Lashing Methods—Mathematical Basis of the Process of Selecting the Number of Lashings. In Proceedings of the 23rd International Scientific Conference on Transport Means, Palanga, Lithuania, 2–4 October 2019. [Google Scholar]
- Vlkovský, M.; Veselík, P. Cargo Securing—Comparison of Different Quality Roads. Acta Univ. Agri. Silvi. Mendel. Brunensis 2019, 67, 1015–1023. [Google Scholar] [CrossRef]
- Vlkovský, M.; Koziol, P.; Grzesica, D. Wavelet Based Analysis of Truck Vibrations during Off-road Transportation. In Proceedings of the 14th International Conference on Vibration Engineering and Technology of Machinery, Lisbon, Portugal, 10–13 September 2018. [Google Scholar]
- Vlkovský, M.; Šmerek, M.; Michálek, J. Cargo Securing during Transport Depending on the Type of a Road. In Proceedings of the 2nd World Multidisciplinary Civil Engineering, Architecture and Urban Planning Symposium, Prague, Czech Republic, 12–16 June 2017. [Google Scholar]
- Vlkovský, M.; Veselík, P.; Grzesica, D. Cargo Securing and Its Economic Consequences. In Proceedings of the 22nd International Scientific Conference on Transport Means—Part I, Kaunas, Lithuania, 3–5 October 2018. [Google Scholar]
- De Oliveira, L.P.; Alonso, F.J.; da Silva, M.A.V.; de Gomes Garcia, B.T.; Lopes, D.M.M. Analysis of the Influence of Training and Feedback Based on Event Data Recorder Information to Improve Safety, Operational and Economic Performance of Road Freight Transport in Brazil. Sustainability 2020, 12, 8139. [Google Scholar] [CrossRef]
- Demasi, F.; Loprencipe, G.; Moretti, L. Road Safety Analysis of Urban Roads: Case Study of an Italian Municipality. Safety 2018, 4, 58. [Google Scholar] [CrossRef]
- Tsoutsi, V.; Dikeos, D.; Basta, M.; Papadakaki, M. Driving Behaviour in Depression: Findings from a Driving Simulator Study. Safety 2019, 5, 70. [Google Scholar] [CrossRef]
- Neumann, V. Possibilities of Vehicle Movement Evaluation. In Proceedings of the 19th International Scientific Conference on Transport Means, Kaunas, Lithuania, 22–23 October 2015. [Google Scholar]
- Zong, C.Q.; Zhang, H.W.; Huang, C.Z.; Dong, J.S. Research on the Influence of Cargo Securing Force with Typical Road Alignments and Vehicle Working Conditions. In Proceedings of the 4th International Conference on Transportation Information and Safety, Banff, AB, Canada, 8–10 August 2017. [Google Scholar]
- García, L.O.; Wilson, F.R.; Innes, J.D. Heavy Track Dynamic Rollover—Effect of Load Distribution, Cargo Type, and Road Design Characteristics. Transp. Res Rec. 2003, 1851, 25–31. [Google Scholar] [CrossRef]
- Breunig, M.M.; Kriegel, H.P.; Ng, R.T.; Sander, J. LOF: Identifying density-based local outliers. ACM Sigmoid Record 2000, 29, 93–104. [Google Scholar] [CrossRef]
- Adam, M.B.; Babura, B.I.; Gopal, K. Range-Box Plotting Relating to Discrete Distribution. Matematika 2018, 2, 187–204. [Google Scholar] [CrossRef]
- Vaghefi, M.; Mahmoodi, K.; Akbari, M. Detection of Outlier in 3D Flow Velocity Collection in an Open-Channel Bend Using Various Data Mining Techniques. Iran J. Sci. Technol. Trans. Civ. Eng. 2019, 43, 197–214. [Google Scholar] [CrossRef]
- Mahmoodi, K.; Ghassemi, H. Outlier Detection in Ocean Wave Measurements by Using Unsupervised Data Mining Methods. Polish Maritime Res. 2018, 1, 44–50. [Google Scholar] [CrossRef]
- Zmuk, B. Speeding Problem Detection in Business Surveys: Benefits of Statistical Outlier Detection Methods. Croatian Oper. Res. Rev. 2017, 8, 33–59. [Google Scholar] [CrossRef]
- Fu, W.J.; Zhao, K.L.; Zhang, C.S.; Wu, J.S.; Tunney, H. Outlier identification of soil phosphorus and its implication for spatial structure modeling. Precis. Agric. 2016, 17, 121–135. [Google Scholar] [CrossRef]
- Barbato, G.; Barini, E.M.; Genta, G.; Levi, R. Robust methods and conditional expectations for vehicular traffic count analysis. Eur. Trans. Res. Rev. 2020, 12, 10. [Google Scholar]
- Bakowski, A.; Radziszewski, L.; Skrobacki, Z. Analysis of Urban Traffic for Various Sets of Vehicles. In Proceedings of the 3rd World Multidisciplinary Civil Engineering, Architecture, Urban Planning Symposium, Prague, Czech Republic, 18–22 June 2018. [Google Scholar]
- Buendia, R.; Forcolin, F.; Karlsson, J.; Sjöqvist, B.J.; Anund, A.; Candefjord, S. Deriving Heart Rate Variability Indices from Cardiac Monitoring—An Indicator of Driver Sleepiness. Traf. Injury Prev. 2019, 20, 249–254. [Google Scholar] [CrossRef] [PubMed]
- Forcolin, F.; Buendia, R.; Candefjord, S.; Karlsson, J.; Sjöqvist, B.A.; Anund, A. Comparison of Outlier Heartbeat Identification and Spectral Transformation Strategies for Deriving Heart Rate Variability Indices for Drivers at Different Stages of Sleepiness. Traf. Injury Prev. 2019, 19, 112–119. [Google Scholar] [CrossRef]
- Staudte, R.G.; Sheather, S.J. Robust Estimation and Testing, 1st ed.; Wiley-Interscience: New York, NY, USA, 1990. [Google Scholar]
- Jurečková, J.; Picek, J.; Schindler, M. Robust Statistical Methods with R; Chapman & Hall/CRC: Boca Raton, FL, USA, 2006. [Google Scholar]
- Maps.cz. Transport Route. Available online: https://mapy.cz/zakladni?planovani-trasy&x=17.9175146&y=49.6482511&z=12&rc=9oWdWxVBCV9p2IWxVisy&rs=coor&rs=coor&ri=&ri=&mrp=%7B%22c%22%3A111%7D&xc=%5B%5D (accessed on 25 September 2020).
- Hollander, M.; Wolfe, D.A. Nonparametric Statistical Methods; John Wiley & Sons: New York, NY, USA, 1973. [Google Scholar]
- Mises, R. Mathematical Theory of Probability and Statistics; Academic Press: New York, NY, USA, 1964. [Google Scholar]
- Anderson, T.W.; Darling, D.A. A Test of Goodness of Fit. J. Amer. Stat. Assoc. 1954, 49, 765–769. [Google Scholar] [CrossRef]
- Řehák, D.; Slivkova, S.; Pittner, R.; Dvorak, Z. Integral approach to assessing the criticality of railway infrastructure element. Int. J. Crit. Infra. 2020, 16, 107–129. [Google Scholar] [CrossRef]
- Řehák, D.; Hromada, M.; Novotny, P. European Critical Infrastructure Risk and Safety Management: Directive Implementation in Practice. In Proceedings of the 15th International Symposium on Loss Prevention and Safety Promotion, Freiburg, Germany, 5–8 June 2016. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| x | y | z | |
|---|---|---|---|
| max | 1.69 | 1.74 | 4.64 |
| min | −1.30 | −1.82 | 1.41 |
| Tests | Cases | Significant Cases | |
|---|---|---|---|
| Axis x-All | 32 | 1 | 0 |
| Axis x-Right-Front | 8 | 1 | 0 |
| Axis x-Right-Rear | 8 | 0 | 0 |
| Axis x-Left-Front | 8 | 0 | 0 |
| Axis x-Left-Rear | 8 | 0 | 0 |
| Axis y-All | 32 | 20 | 18 |
| Axis y-Right-Front | 8 | 8 | 7 |
| Axis y-Right-Rear | 8 | 4 | 4 |
| Axis y-Left-Front | 8 | 5 | 4 |
| Axis y-Left-Rear | 8 | 3 | 3 |
| Axis z-All | 32 | 24 | 24 |
| Axis z-Right-Front | 8 | 8 | 8 |
| Axis z-Right-Rear | 8 | 8 | 8 |
| Axis z-Left-Front | 8 | 8 | 8 |
| Axis z-Left-Rear | 8 | 0 | 0 |
| Mean of x0.80 | Sd | Mean of Empirical x0.80 | Sd | |
|---|---|---|---|---|
| Axis x-All | 0.62898 | 0.09664 | 0.62938 | 0.09788 |
| Axis x-Right-Front | 0.74548 | 0.05544 | 0.74750 | 0.05701 |
| Axis x-Right-Rear | 0.51386 | 0.00951 | 0.51375 | 0.01188 |
| Axis x-Left-Front | 0.57569 | 0.01948 | 0.57375 | 0.01923 |
| Axis x-Left-Rear | 0.74548 | 0.05544 | 0.74750 | 0.05701 |
| Axis y-All | 0.61731 | 0.03378 | 0.61844 | 0.03264 |
| Axis y-Right-Front | 0.66319 | 0.03231 | 0.66125 | 0.03091 |
| Axis y-Right-Rear | 0.59898 | 0.01650 | 0.60125 | 0.01808 |
| Axis y-Left-Front | 0.60605 | 0.01267 | 0.60750 | 0.01389 |
| Axis y-Left-Rear | 0.66319 | 0.03231 | 0.66125 | 0.03091 |
| Axis z-All | 2.21461 | 0.18686 | 2.21406 | 0.18557 |
| Axis z-Right-Front | 2.29579 | 0.10898 | 2.29250 | 0.10951 |
| Axis z-Right-Rear | 2.34138 | 0.03978 | 2.34000 | 0.04071 |
| Axis z-Left-Front | 2.30595 | 0.04865 | 2.30625 | 0.04838 |
| Axis z-Left-Rear | 1.91531 | 0.03153 | 1.91750 | 0.03370 |
| Expected Value 1 | Sd 1 | Expected Value 2 | Sd 2 | Ratio of Outliers p2 | |
|---|---|---|---|---|---|
| Axis x-all | 0.56452 | 0.34560 | 0.89463 | 0.54579 | 0.01245 |
| Axis x-Right-Front | 0.65251 | 0.40161 | 1.09803 | 0.66673 | 0.00873 |
| Axis x-Right-Rear | 0.46645 | 0.28488 | 0.72740 | 0.44543 | 0.01463 |
| Axis x-Left-Front | 0.52168 | 0.31864 | 0.82881 | 0.50847 | 0.01744 |
| Axis x-Left-Rear | 0.61746 | 0.37727 | 0.92427 | 0.56254 | 0.00900 |
| Axis y-all | 0.55355 | 0.33862 | 0.91089 | 0.55815 | 0.02078 |
| Axis y-Right-Front | 0.58948 | 0.36125 | 0.95456 | 0.58122 | 0.01745 |
| Axis y-Right-Rear | 0.54221 | 0.33119 | 0.89838 | 0.55322 | 0.01955 |
| Axis y-Left-Front | 0.54190 | 0.33146 | 0.90178 | 0.55325 | 0.02855 |
| Axis y-Left-Rear | 0.54062 | 0.33059 | 0.88886 | 0.54492 | 0.01757 |
| Axis z-all | 2.08370 | 1.26715 | 2.64994 | 1.61213 | 0.01782 |
| Axis z-Right-Front | 2.13525 | 1.30027 | 2.56050 | 1.55425 | 0.00647 |
| Axis z-Right-Rear | 2.20397 | 1.33997 | 2.92629 | 1.78253 | 0.02334 |
| Axis z-Left-Front | 2.19647 | 1.33440 | 2.66335 | 1.61614 | 0.01478 |
| Axis z-Left-Rear | 1.79912 | 1.09395 | 2.44961 | 1.49559 | 0.02670 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vlkovský, M.; Neubauer, J.; Malíšek, J.; Michálek, J. Improvement of Road Safety through Appropriate Cargo Securing Using Outliers. Sustainability 2021, 13, 2688. https://doi.org/10.3390/su13052688
Vlkovský M, Neubauer J, Malíšek J, Michálek J. Improvement of Road Safety through Appropriate Cargo Securing Using Outliers. Sustainability. 2021; 13(5):2688. https://doi.org/10.3390/su13052688
Chicago/Turabian StyleVlkovský, Martin, Jiří Neubauer, Jiří Malíšek, and Jaroslav Michálek. 2021. "Improvement of Road Safety through Appropriate Cargo Securing Using Outliers" Sustainability 13, no. 5: 2688. https://doi.org/10.3390/su13052688
APA StyleVlkovský, M., Neubauer, J., Malíšek, J., & Michálek, J. (2021). Improvement of Road Safety through Appropriate Cargo Securing Using Outliers. Sustainability, 13(5), 2688. https://doi.org/10.3390/su13052688