Assessing On-Road Emission Flow Pattern under Car-Following Induced Turbulence Using Computational Fluid Dynamics (CFD) Numerical Simulation


Abstract
:1. Introduction
2. Methodology and Modeling
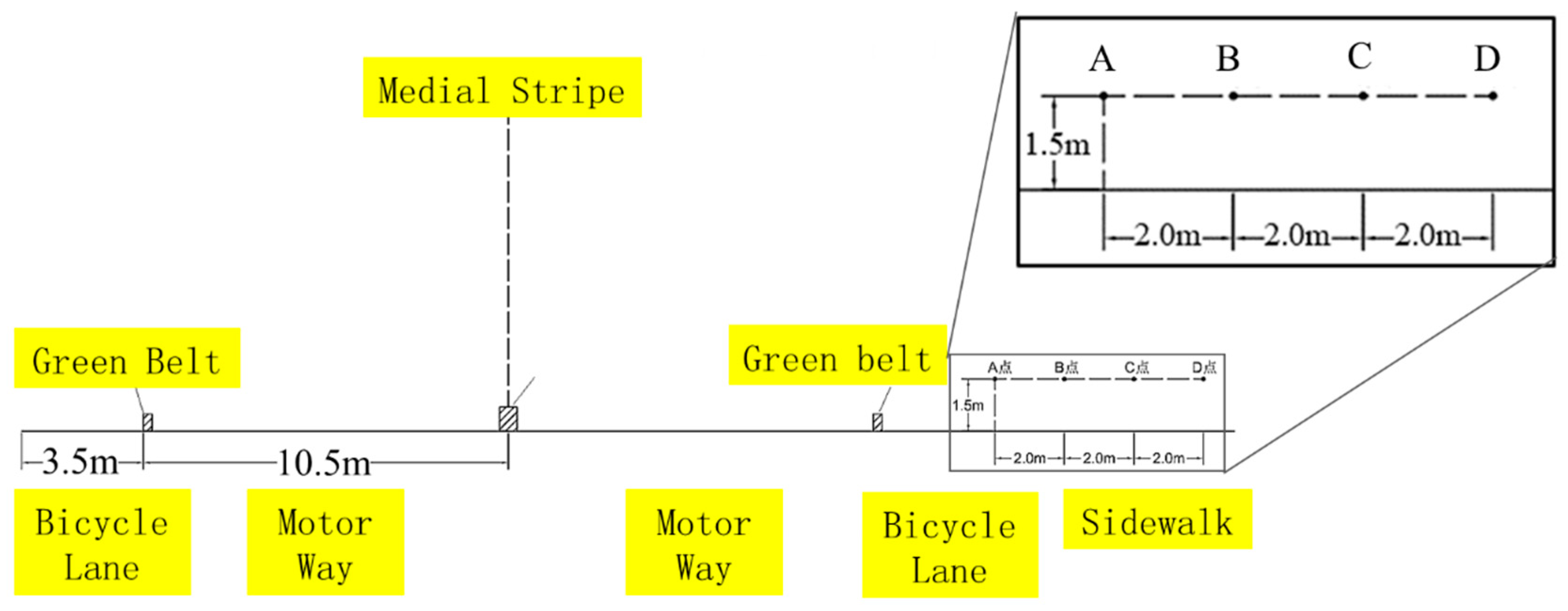
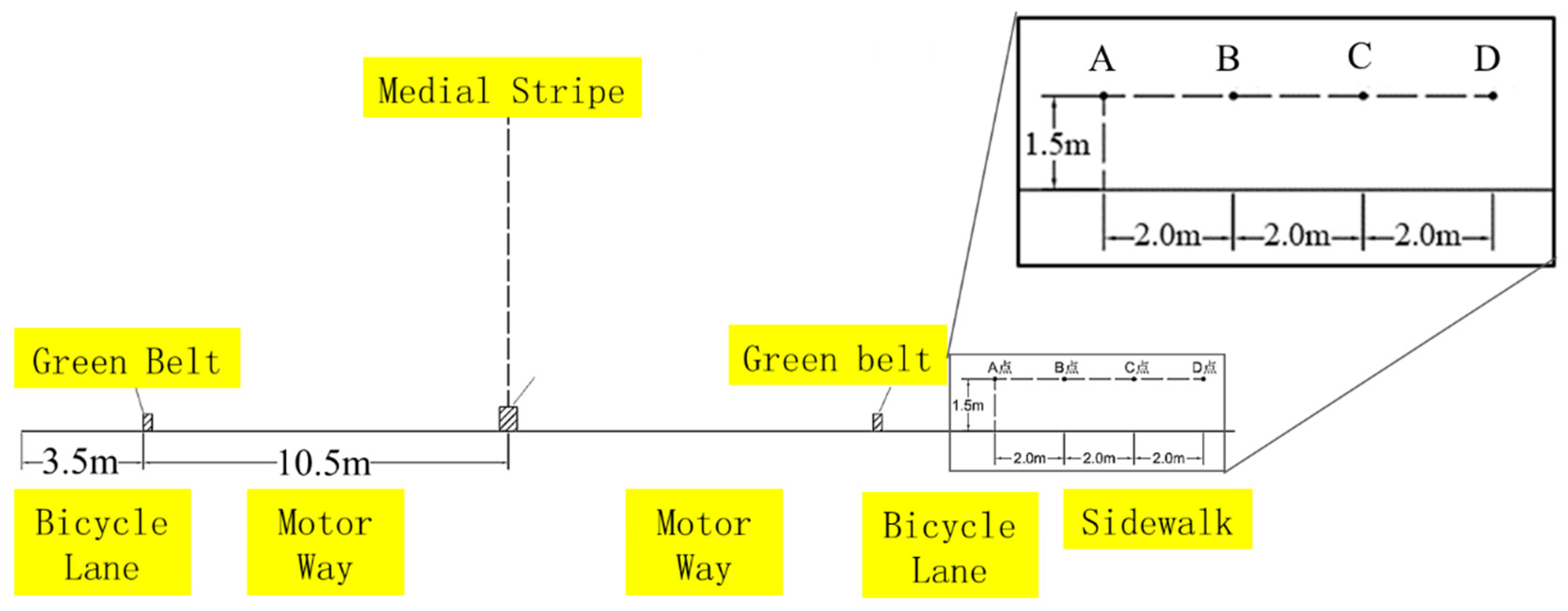
2.1. Field Measurement
2.1.1. CO Concentration
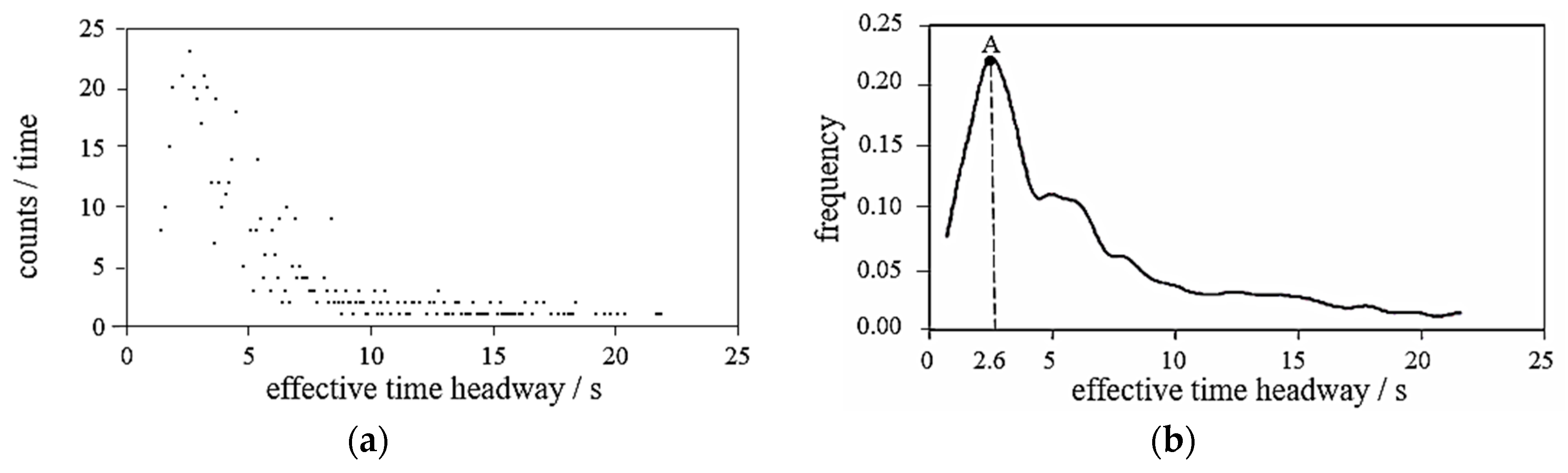
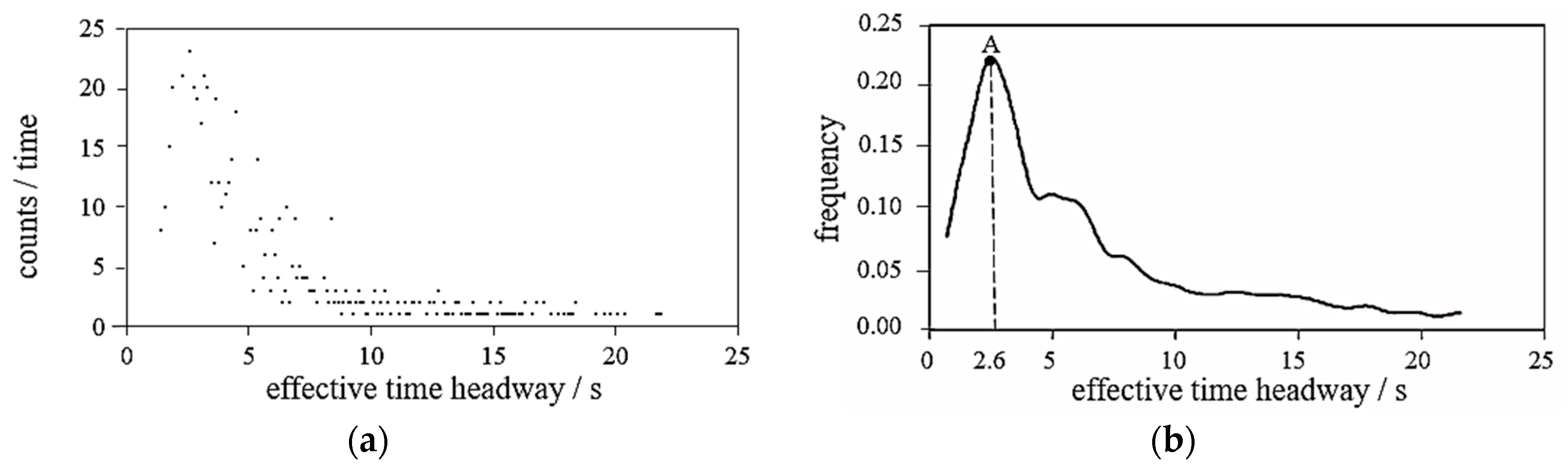
2.1.2. Traffic Flow
2.2. Numerical Approach
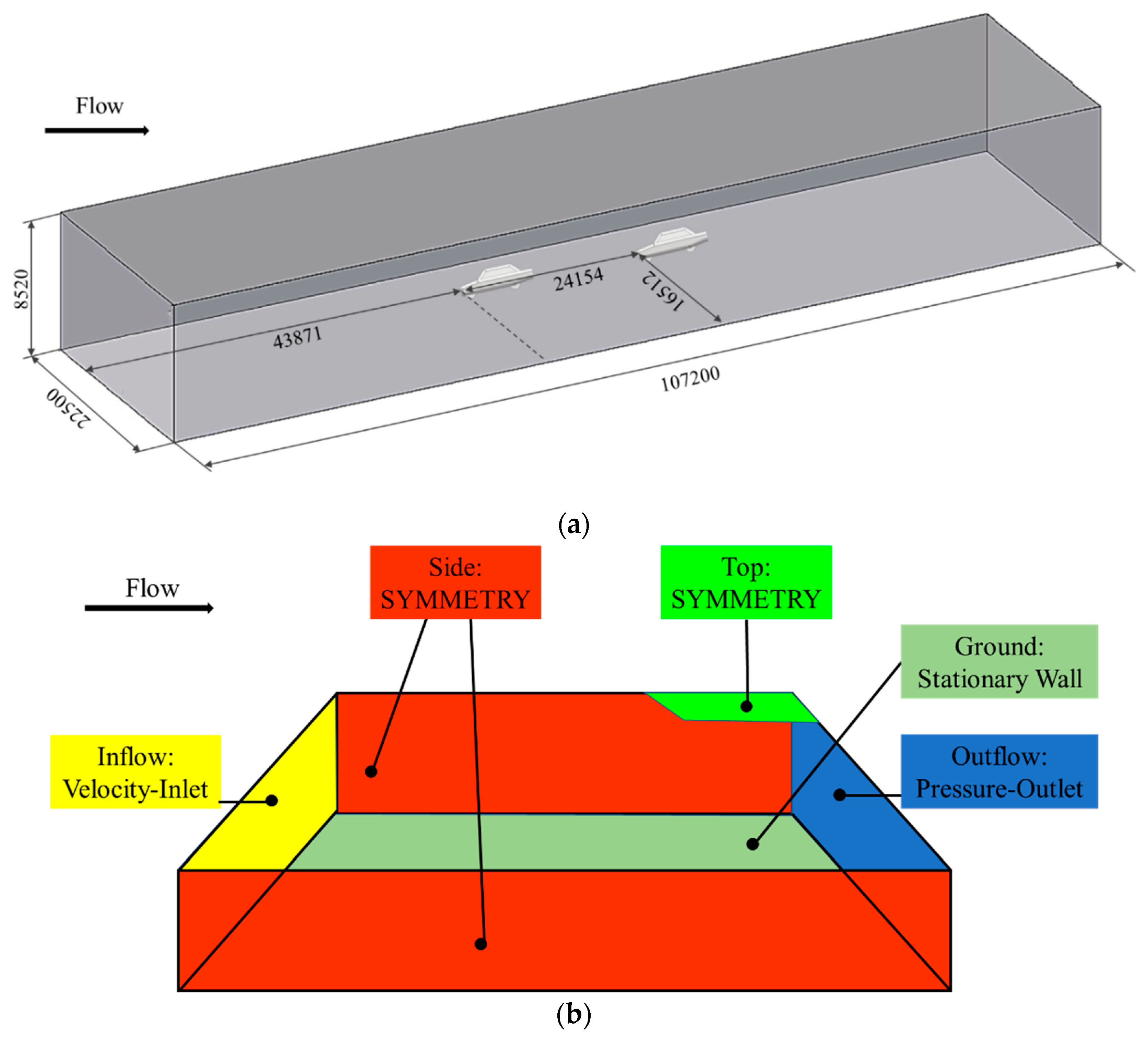
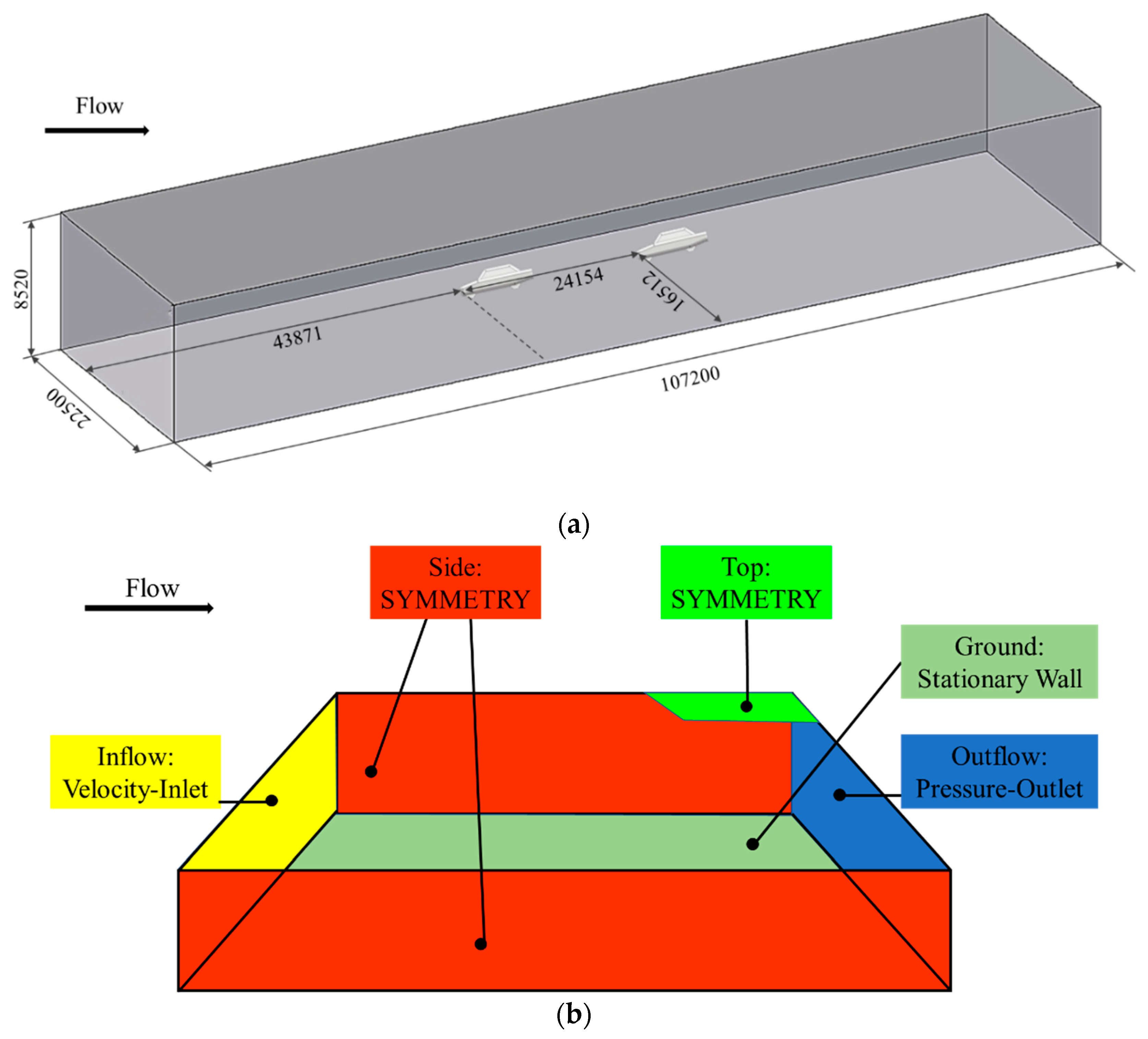
2.2.1. CFD Model Built-Up
2.2.2. Mathematical Model
2.2.3. CFD Parametrization
- Inflow boundary: Velocity-Inlet, Temperature = 300 K, CO Mass Fraction = 0.001.
- Outflow boundary: Pressure-Outlet, Static Pressure = 0.
- Ground and vehicle body surface: Stationary Wall, Roughness Height (m) = 0, Roughness Constant = 0.5.
- Top and side surfaces: SYMMETRY.
- Exhaust pipe: Velocity-Inlet (VCO = 4.8 m/s), CO Mass Fraction = 0.1.
- Flow (air): Pressure = 1.01325 × 105 Pa, Temperature = 288 K, Density = 1.225 kg/m3, Dynamic Coefficient of Viscosity , Kinematic Coefficient of Viscosity .
2.2.4. CFD Model Assumptions
2.3. Grid Sensitivity Analysis
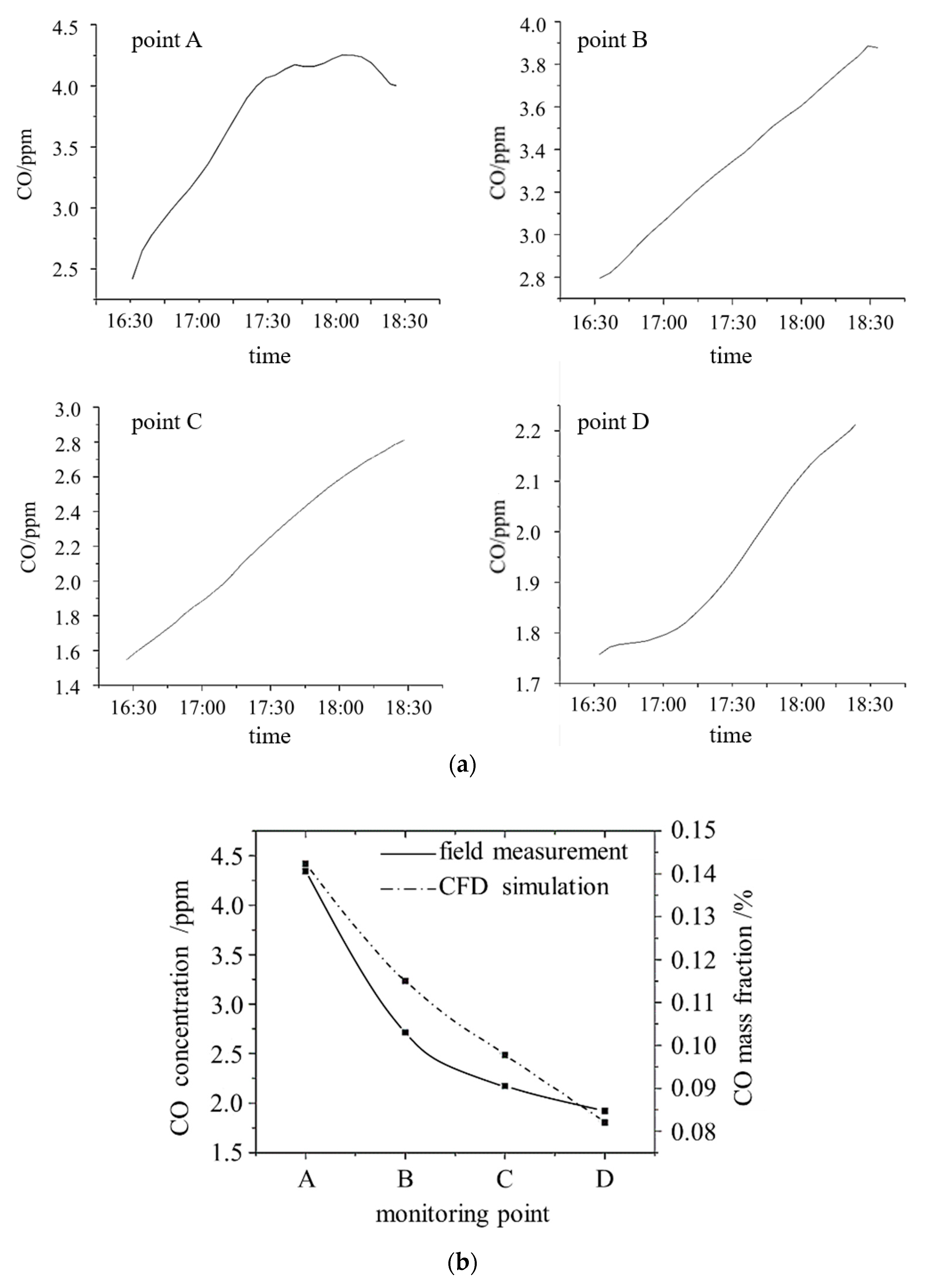
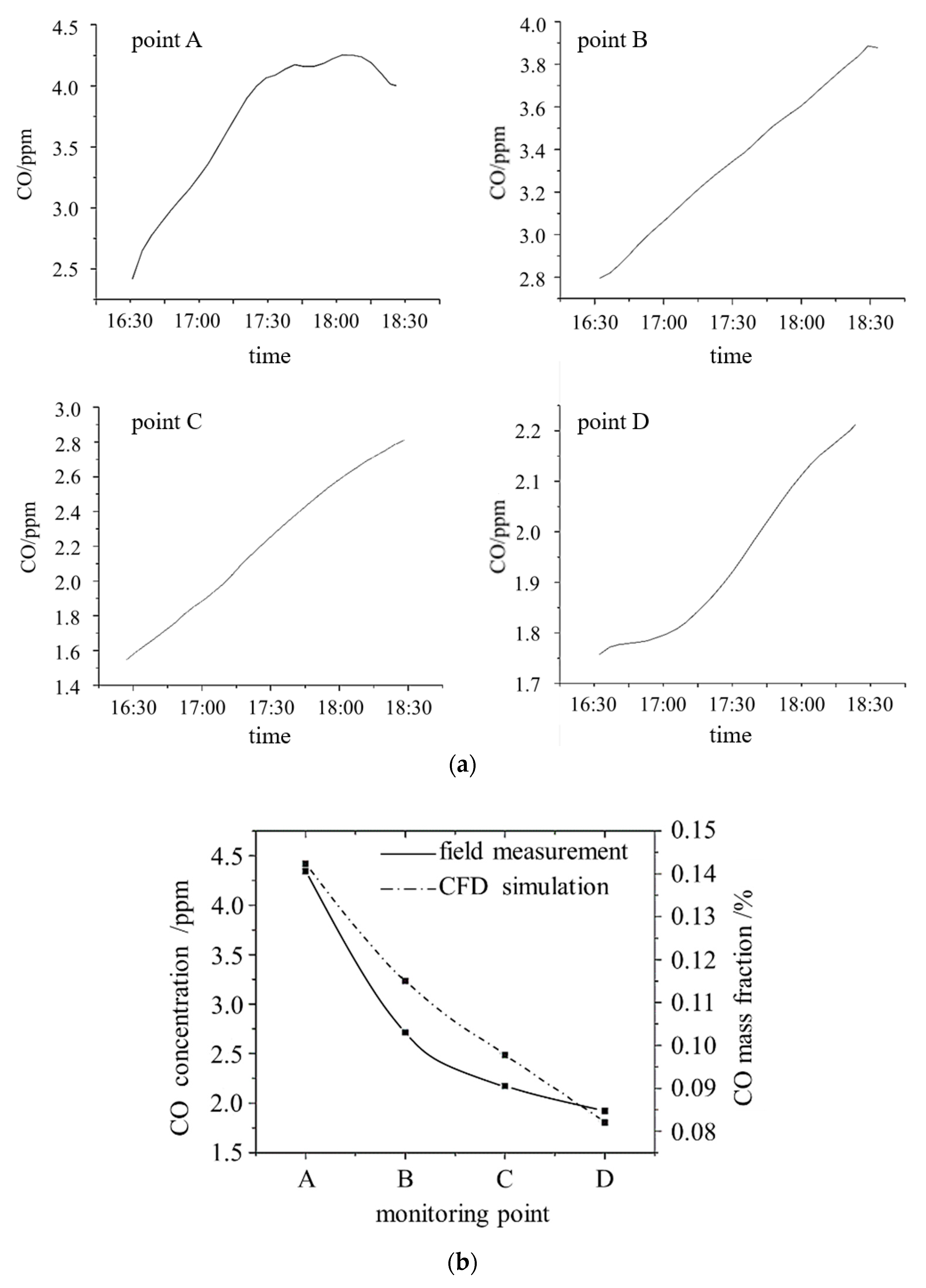
2.4. Model Calibration
- The monitoring duration was at the evening peak, with large motor vehicle flow and high CO emission intensity;
- There are tall buildings on both sides of the monitoring locations, and CO was easy to accumulate there;
- On the day of experiment, the wind speed was small, which makes it difficult for CO to enter the surrounding area.
3. Results and Discussion
3.1. Steady-State Simulation Results
3.1.1. Verification of Existence of VIT Influence
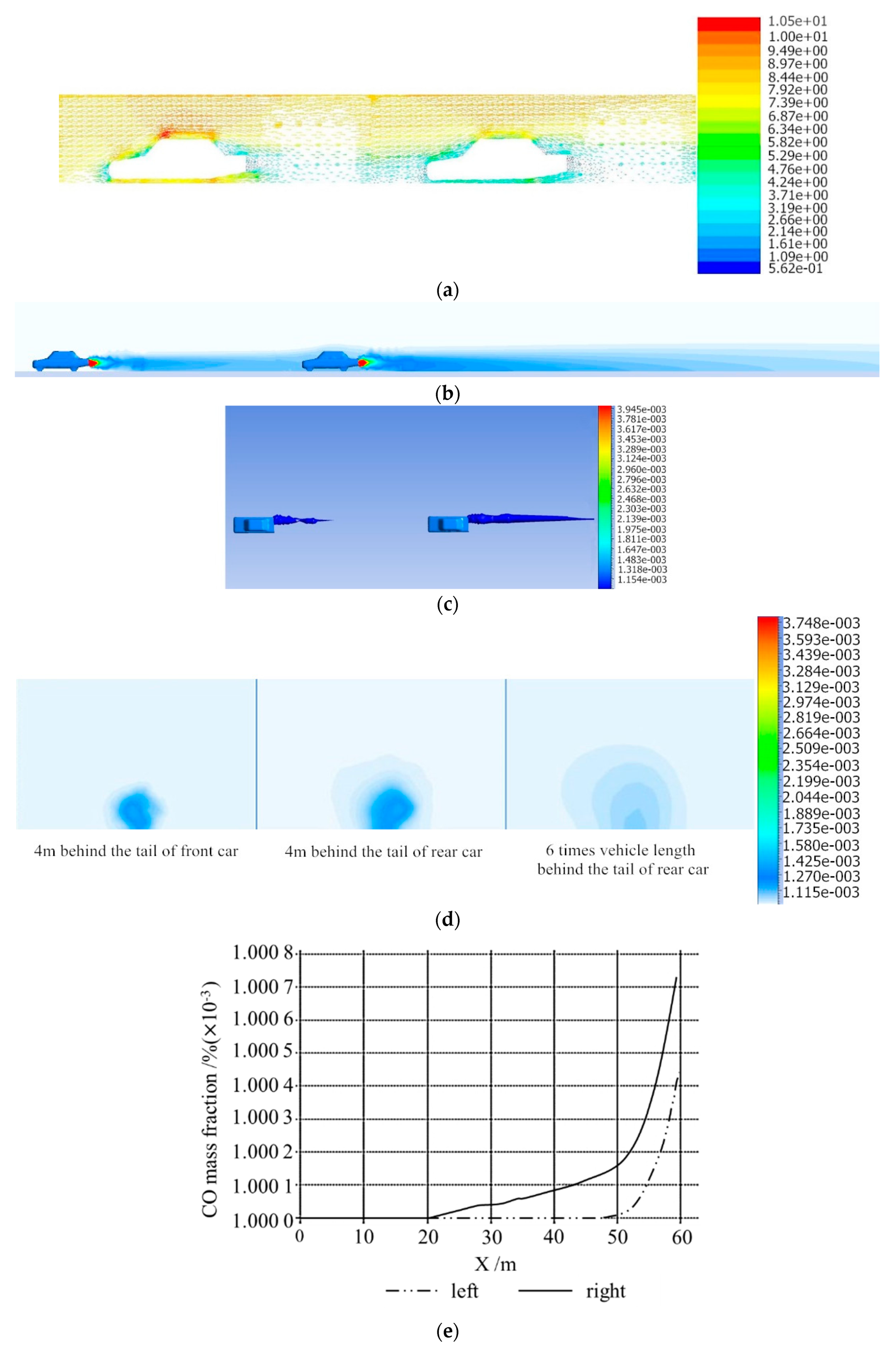
3.1.2. Influence of VIT in Direction along the Road
3.1.3. Influence of VIT in Direction Perpendicular to the Road
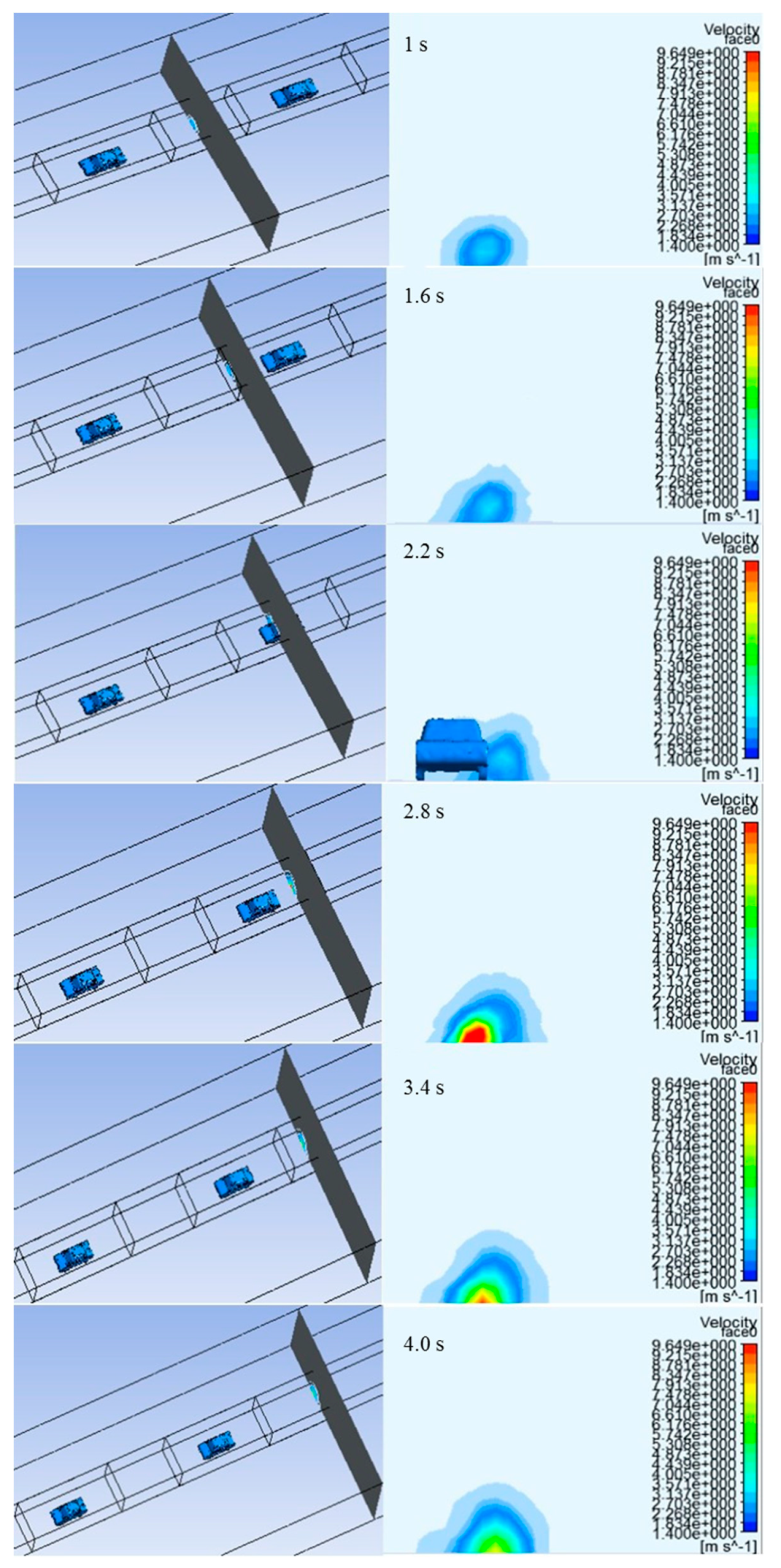
3.2. Transient Simulation Results
3.2.1. Judgment of Stable Driving State
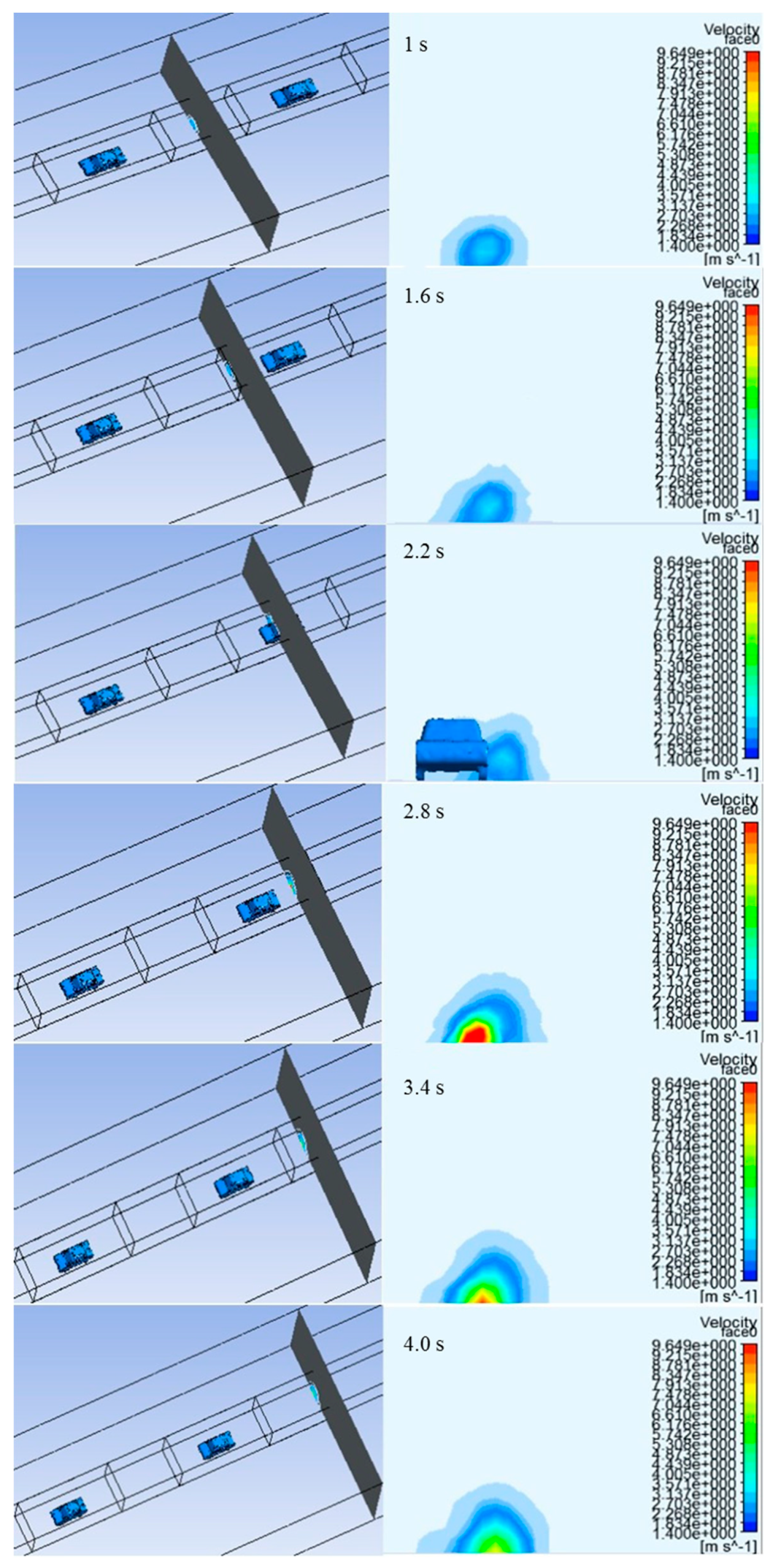
3.2.2. Influence of VIT over Time
4. Conclusions
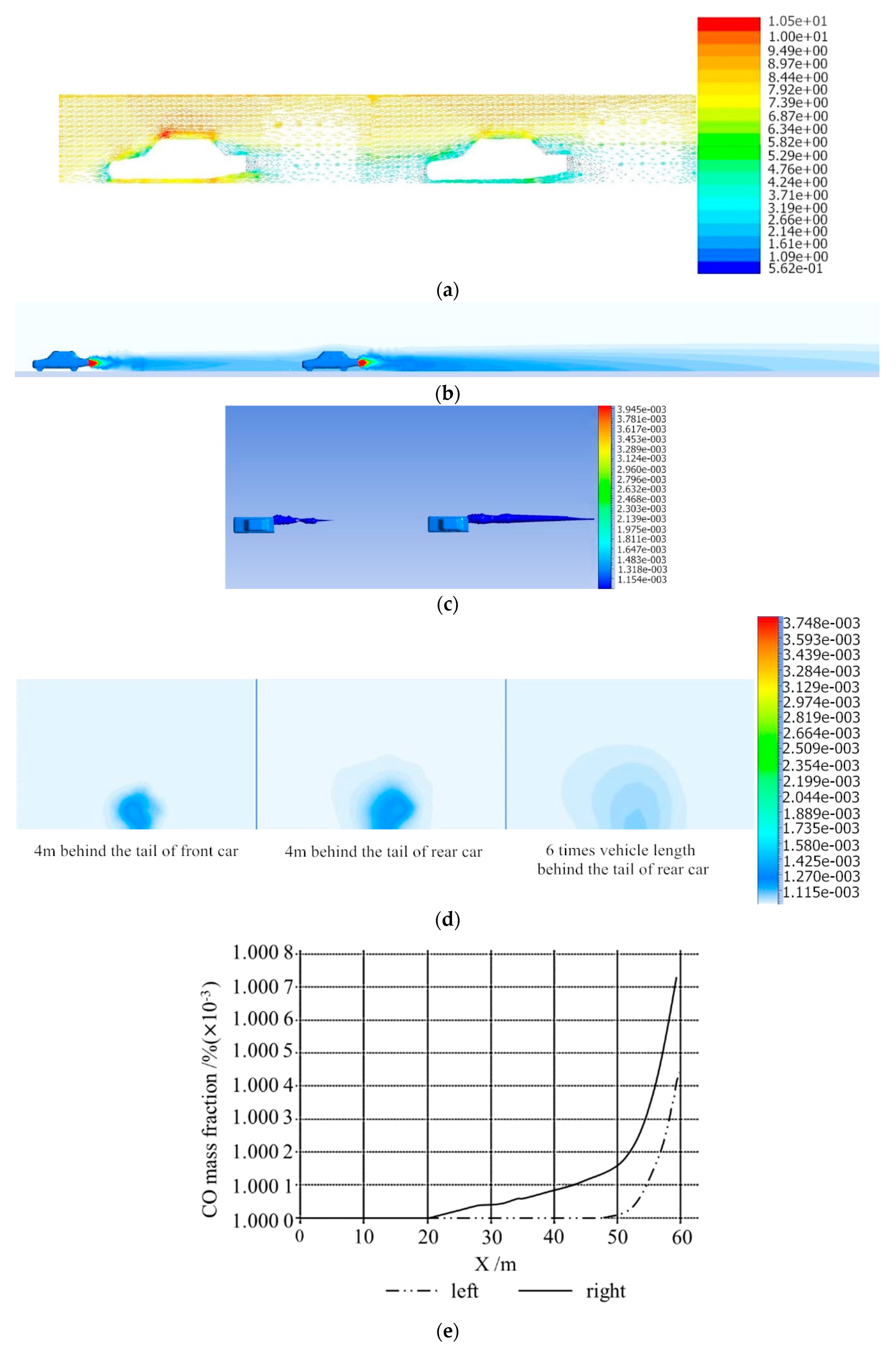
- The vehicle induced turbulence caused by front- and rear-vehicles impedes the diffusion of traffic exhaust of the front car. Until the convergence timing occurred in the steady simulation, the front-vehicle isosurface with the CO mass fraction of 0.0012 extended to 6.0 m behind the vehicle, while rear-vehicle isosurface with the CO mass fraction of 0.0012 extended to 12.7 m behind the vehicle. Thus, in the direction along the road, the dispersion speed of the rear car pollutant was about twice that of the front one. According to Wang et al. [45], the CO concentration of a single car drops to a number near the background concentration within 4 m of the vehicle rear, which is lower than the results in this paper. By comparison, we can draw the conclusion that although the emissions of the front vehicle disperse slower than that of the rear vehicle, from an overall perspective, VIT is beneficial to the diffusion of pollutants of a motorcade.
- In the direction perpendicular to the road, the VIT influence area is generally concentrated within 1 m of the vehicle side. This result is consistent with the research of Wang et al. [45], which concluded that the concentration is relatively high within the radius of the exhaust pipe from 1 m to 1.5 m. That is, within a range of 1 m on both sides of vehicle there is a large concentration gradient area, which accounts for 99.85% of the total concentration gradient between the background environment and the exhaust pipe, which contains sharp mechanical turbulence and a complex traffic exhaust flow mechanism. In the large concentration gradient region, VIT should be considered carefully since it might affect the on-road emissions concentration.
- In this research, with the fleet average speed of 9.29 m/s and the average space headway of 24.15 m, the vehicle induced turbulence zone was approximated within a range of 9 m behind the rear car, afterwards the influence of VIT weakened.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hao, H.; Wang, H.; Yi, R. Hybrid Modeling of China’s Vehicle Ownership and Projection through 2050. Energy 2011, 36, 1351–1361. [Google Scholar] [CrossRef]
- Zhang, L.; Long, R.; Chen, H.; Geng, J. A Review of China’s Road Traffic Carbon Emissions. J. Clean. Prod. 2019, 207, 569–581. [Google Scholar] [CrossRef]
- Barnes, J.H.; Chatterton, T.J.; Longhurst, J.W.S. Emissions vs Exposure: Increasing Injustice from Road Traffic-related Air Pollution in the United Kingdom. Transp. Res. Part D Transp. Environ. 2019, 73, 56–66. [Google Scholar] [CrossRef]
- Vardoulakis, S.; Fisher, B.E.A.; Pericleous, K.; Gonzalez-Flesca, N. Modelling Air Quality in Street Canyons: A Review. Atmos. Environ. 2003, 37, 155–182. [Google Scholar] [CrossRef]
- Jones, S.G.; Fisher, B.E.A.; Gonzalez–Flesca, N.; Sokhi, R. The Use of Measurement Programmes and Models to Assess Concentrations next to Major Roads in Urban Areas. Environ. Monit. Assess. 2000, 64, 531–547. [Google Scholar] [CrossRef]
- Hertel, O.; Berkowicz, R. Modelling Pollution from Traffic in a Street Canyon. Evaluation of Data and Model Development; NERI: Roskilde, Denmark, 1989. [Google Scholar]
- Gosman, A.D. Developments in CFD for Industrial and Environmental Applications in Wind Engineering. J. Wind Eng. Ind. Aerodyn. 1999, 81, 21–39. [Google Scholar] [CrossRef]
- Kondo, H.; Tomizuka, T. A numerical Experiment of Roadside Diffusion under Traffic-produced Flow and Turbulence. Atmos. Environ. 2009, 43, 4137–4147. [Google Scholar] [CrossRef]
- Parra, M.A.; Santiago, J.L.; Martin, F.; Martilli, A.; Santamaria, J.M. A Methodology to Urban Air Quality Assessment during Large Time Periods of Winter using Computational Fluid Dynamic Models. Atmos. Environ. 2010, 44, 2089–2097. [Google Scholar] [CrossRef]
- Wang, L.; Jayaratne, R.; Heuff, D.; Morawska, L. Development of a Composite Line Source Emission Model for Traffic Interrupted Microenvironments and its Application in Particle Number Emissions at a Bus Station. Atmos. Environ. 2010, 44, 3269–3277. [Google Scholar] [CrossRef]
- Sun, D.J.; Zhang, K.S.; Shen, S.W. Analyzing Spatiotemporal Traffic Line Source Emissions based on Massive Didi Online car-hailing Service Data. Transp. Res. Part D Transp. Environ. 2018, 62, 699–714. [Google Scholar] [CrossRef]
- Ming, T.Z.; Fang, W.J.; Peng, C.; Cai, C.J.; De Richter, R.; Ahmadi, M.H.; Wen, Y.G. Impacts of Traffic Tidal Flow on Pollutant Dispersion in a Non-Uniform Urban Street Canyon. Atmosphere 2018, 9, 82. [Google Scholar] [CrossRef]
- Jeanjean, A.P.R.; Hinchliffe, G.; McMulla, W.A.; Monks, P.S.; Leigh, R.J. A CFD study on the effectiveness of trees to disperse road traffic emissions at a city scale. Atmos. Environ. 2015, 120, 1–14. [Google Scholar] [CrossRef]
- Sun, D.J.; Zhang, Y. Influence of Avenue Trees on Traffic Pollutant Dispersion in Asymmetric Street Canyons: Numerical Modelling with Empirical Analysis. Transp. Res. Part D Transp. Environ. 2018, 65, 784–795. [Google Scholar] [CrossRef]
- Buccolieri, R.; Gromke, C.; Sabatino, S.D.; Ruck, B. Aerodynamic Effects of Trees on Pollutant Concentration in Street Canyons. Sci. Total Environ. 2009, 407, 5247–5256. [Google Scholar] [CrossRef] [PubMed]
- Meroney, R.N.; Pavageau, M.; Rafailidis, S.; Schatzmann, M. Study of Line Source Characteristics for 2–D Physical Modelling of Pollutant Dispersion in Street Canyons. J. Wind Eng. Ind. Aerodyn. 1996, 62, 37–56. [Google Scholar] [CrossRef]
- Sanchez, B.; Santiago, J.L.; Martilli, A.; Martin, F.; Borge, R.; Quaassdorff, C.; de la Paz, D. Modelling NOx Concentrations through CFD–RANS in an Urban Hot-spot using High Resolution Traffic Emissions and Meteorology from a Mesoscale Model. Atmos. Environ. 2017, 163, 155–165. [Google Scholar] [CrossRef]
- Hucho, W.H.; Sovran, G. Aerodynamics of Road Vehicles. Annu. Rev. Fluid Mech. 1993, 25, 485–537. [Google Scholar] [CrossRef]
- Rao, S.T.; Sedefian, L.; Czapski, U.H. Characteristics of Turbulence and Dispersion of Pollutants near Major Highways. J. Appl. Meteorol. Climatol. 1979, 18, 283–293. [Google Scholar]
- Kastner–Klein, P.; Berkowicz, R.; Plate, E.J. Modelling of Vehicle-induced Turbulence in Air Pollution Studies for Streets. Int. J. Environ. Pollut. 2000, 14, 496–507. [Google Scholar] [CrossRef]
- Deng, S.X.; Guan, Y.L. Analytical Solutions of Atmospheric Diffusion Equation with Multi Sources from Roads. J. Changan UNIV 2005, 25, 94–99. [Google Scholar]
- Zhang, K.M.; Wexler, A.S.; Niemeier, A.S.; Zhu, Y.F.; Hinds, W.C.; Sioutas, C. Evolution of Particle Number Distribution near Roadways. Part III: Traffic Analysis and On-road Size Resolved Particulate Emission Factors. Atmos. Environ. 2005, 39, 4155–4166. [Google Scholar] [CrossRef]
- Zou, Y.; Zhao, X.; Chen, Q. Comparison of STAR-CCM+ and ANSYS Fluent for Simulating Indoor Airflows. Build. Simul. 2018, 11, 165–174. [Google Scholar] [CrossRef]
- Greifzu, F.; Kratzsch, C.; Forgber, T.; Lindener, F.; Schwarze, R. Assessment of Particle-tracking Models for Dispersed Particle-laden Flows Implemented in OpenFOAM and ANSYS FLUENT. Eng. Appl. Comput. Fluid Mech. 2016, 10, 30–43. [Google Scholar] [CrossRef]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method, 2nd ed.; Pearson Prentice Hall: New York, NY, USA, 2007. [Google Scholar]
- Liu, W.J.; Jiao, F.C.; Ren, L.J.; Xu, X.G.; Wang, J.C.; Wang, X. Coupling Coordination Relationship between Urbanization and Atmospheric Environment Security in Jinan City. J. Clean. Prod. 2018, 204, 1–11. [Google Scholar] [CrossRef]
- Fricker, J.D.; Whitford, R.K. Fundamentals of Transportation Engineering: A Multimodal Systems Approach; Pearson Prentice Hall: Upper Saddle River, USA, 2007. [Google Scholar]
- The Top Ten Passenger Car Brands in 2017. Available online: http://www.caam.org.cn/chn/4/cate_31/con_5214783.html (accessed on 10 November 2018).
- Le Good, G.M.; Garry, K.P. On the Use of Reference Models in Automotive Aerodynamics. In Proceedings of the 2004 SAE World Congress and Exhibition, Detroit, MI, USA, 8–11 March 2004. [Google Scholar]
- Franke, J.; Hellsten, A.; Schlunzen, K.H.; Carissimo, B. The COST 732 Best Practice Guideline for CFD Simulation of Flows in the Urban Environment: A Summary. Int. J. Environ. Pollut. 2011, 44, 419–427. [Google Scholar] [CrossRef]
- Li, L.; Du, G.S.; Liu, Z.G.; Lei, L. The Transient Aerodynamic Characteristics around Vans Running into a Road Tunnel. J. Hydrodyn. 2010, 22, 283–288. [Google Scholar] [CrossRef]
- Batchelor, G.K. Equations Governing the Motion of a Fluid, in: An Introduction to Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Blazek, J. Computational Fluid Dynamics: Principles and Applications, 2nd ed.; Elsevier, Ltd.: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Zhang, M.L.; Shen, Y.M. Three-dimensional Simulation of Meandering River based on 3D RNG Turbulence model. J. Hydrodyn. 2008, 20, 448–455. [Google Scholar] [CrossRef]
- Chen, X.; Lu, C.J.; Li, J.; Pan, Z.C. The Wall Effect on Ventilated Cavitating Flows in Closed Cavitation Tunnels. J. Hydrodyn. 2008, 20, 561–566. [Google Scholar] [CrossRef]
- Pulliam, T.H.; Zingg, D.W. Fundamentals of Computational Fluid Dynamics; Springer: Berlin, Germany, 2001. [Google Scholar]
- Mika, S.; Brandner, M. Numerical Modelling of Some Two-phase Fluid Flow Problems. Math. Comput. Simul. 2004, 67, 301–305. [Google Scholar] [CrossRef]
- Vranckx, S.; Vos, P.; Maiheu, B.; Janssen, S. Impact of Trees on Pollutant Dispersion in Street Canyons: A Numerical Study of the Annual Average Effects in Antwerp, Belgium. Sci. Total Environ. 2015, 532, 474–483. [Google Scholar] [CrossRef]
- Concentration Data of Street Canyon. Laboratory of Building and Environ-mental Aerodynamics. Available online: http://www.ifh.uni-karlsruhe.de/science/aerodyn/CODASC.htm (accessed on 27 November 2018).
- Openfoam CFD Simulation of Pollutant Dispersion in Street Canyons: Validation and Annual Impact of Trees. Available online: http://www.irceline.be/atmosys/faces/doc/ATMOSYS_Deliverable_9.2b_windtunnel%20validation.pdf (accessed on 27 November 2018).
- Himeno, R.; Fujitani, K. Numerical analysis and visualization of flow in automobile aerodynamics development. J. Wind Eng. Ind. Aerodyn. 1993, 785–790. [Google Scholar] [CrossRef]
- Wang, J.Z. Numerical Simulation of Vehicle Pollutant Dispersion in Urban Street Canyon; Shandong UNIV: Jinan, China, 2012. [Google Scholar]
- Tsubokura, M.; Yamada, N.; Kitayama, S. Effects of Body Shapes on Unsteady Aerodynamics of Road Vehicles in a Gusty Crosswind. In Proceedings of the 28th AIAA Applied Aerodynamics Conference, Chicago, IL, USA, 28 June–1 July 2010. [Google Scholar]
- Fluent Inc. Fluent User’s Guide; Version 5.0; Fluent Inc.: Lebanon, NH, USA, 1998. [Google Scholar]
- Wang, J.S.; Chan, T.L.; Huang, Z.; Cheung, C.S.; Ning, Z. The prediction and field observation for Pollutant Dispersion from Vehicular Exhaust Plume in Real Atmospheric Environment. J. Shanghai Jiaotong Univ. 2005, 39, 1891–1894. [Google Scholar]
- Sun, D.S.; Ding, X. Spatiotemporal evolution of ridesourcing markets under the new restriction policy: A case study in Shanghai. Transp. Res. Part A Policy Pract. 2019, 130, 227–239. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Precision | Low | Medium-Low | Normal | High |
|---|---|---|---|---|
| Max grid size (m) | 0.40 | 0.35 | 0.30 | 0.25 |
| Grid quantity | 300,000 | 450,000 | 650,000 | 1,150,000 |
| Cd | 0.366 | 0.364 | 0.320 | 0.312 |
| Error (%) | 19.80 | 19.20 | 4.70 | 2.10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Sun, D.; Fu, S.; Zhao, Z.; Liu, J. Assessing On-Road Emission Flow Pattern under Car-Following Induced Turbulence Using Computational Fluid Dynamics (CFD) Numerical Simulation. Sustainability 2019, 11, 6705. https://doi.org/10.3390/su11236705
Shi X, Sun D, Fu S, Zhao Z, Liu J. Assessing On-Road Emission Flow Pattern under Car-Following Induced Turbulence Using Computational Fluid Dynamics (CFD) Numerical Simulation. Sustainability. 2019; 11(23):6705. https://doi.org/10.3390/su11236705
Chicago/Turabian StyleShi, Xueqing, Daniel (Jian) Sun, Song Fu, Zhonghua Zhao, and Jinfang Liu. 2019. "Assessing On-Road Emission Flow Pattern under Car-Following Induced Turbulence Using Computational Fluid Dynamics (CFD) Numerical Simulation" Sustainability 11, no. 23: 6705. https://doi.org/10.3390/su11236705
APA StyleShi, X., Sun, D., Fu, S., Zhao, Z., & Liu, J. (2019). Assessing On-Road Emission Flow Pattern under Car-Following Induced Turbulence Using Computational Fluid Dynamics (CFD) Numerical Simulation. Sustainability, 11(23), 6705. https://doi.org/10.3390/su11236705