



Accelerated and Refined Lane-Level Route-Planning Method Based on a New Road Network Model for Autonomous Vehicle Navigation

Abstract
1. Introduction
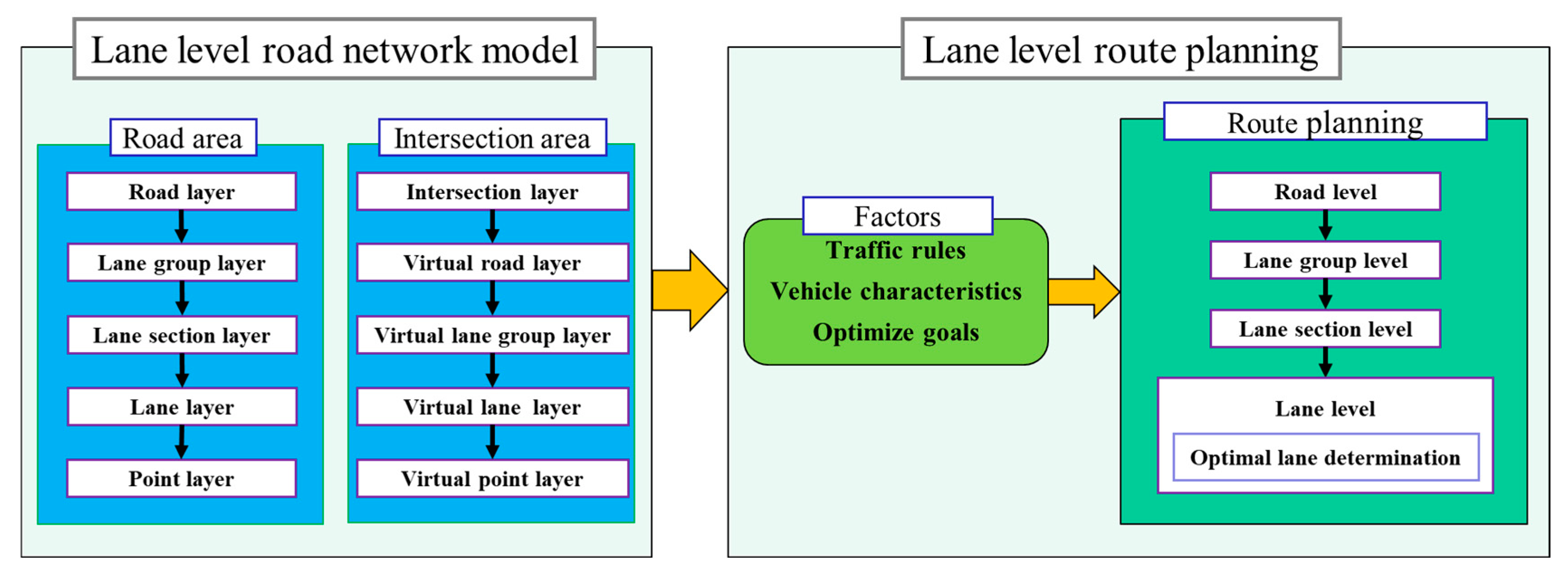
- A new road network model for lane-level route planning is proposed. The model is divided into the road and intersection areas containing five sub-layers. The model can express multiple road network structures and can facilitate more flexible, fine-grained, and efficient route planning.
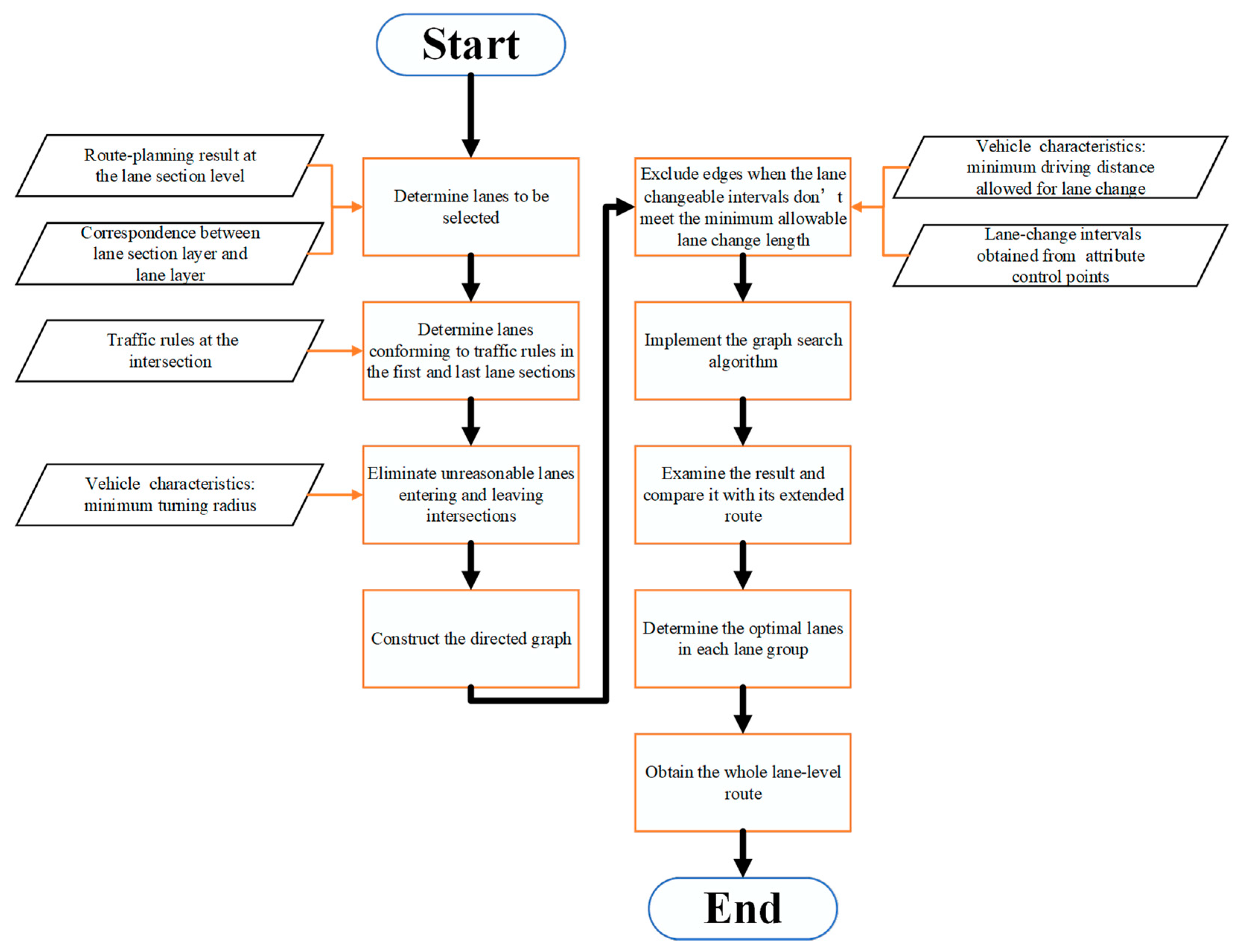
- Based on the proposed road network model, an accelerated and refined lane-level route-planning method is proposed. First, a multi-level route-planning algorithm is designed for sequential planning at the road level, lane group level, lane section level, and lane level, reducing the number of nodes and edges traversed and improving routing efficiency. Then, an optimal lane determination algorithm considering traffic rules, vehicle characteristics, and optimization objectives is developed to find the optimal lanes at the lane level. The entire route-planning algorithm can remarkably improve existing search algorithms’ efficiency in searching lane-level routes and acquire optimal lanes satisfying traffic rules and vehicle characteristics on roads with different structures, including those with a constant or variable number of lanes.
2. Lane-Level Road Network Modeling
2.1. Road Area
2.1.1. Road Layer
2.1.2. Lane Group Layer
2.1.3. Lane Section Layer
2.1.4. Lane Layer
2.1.5. Point Layer
2.2. Intersection Area
2.2.1. Intersection Layer
2.2.2. Virtual Road Layer
2.2.3. Virtual Lane Group Layer
2.2.4. Virtual Lane Layer
2.2.5. Virtual Point Layer
2.3. Comparison with Other Map Models
3. Lane-Level Route Planning
3.1. Route Planning at the Road Level
3.2. Route Planning at the Lane Group Level
3.3. Route Planning at the Lane Section Level
3.4. Route Planning at the Lane Level
4. Results and Discussion
5. Conclusions
- A new road network model for lane-level route planning is proposed. The whole model is divided into the road area and the intersection area, containing five sub-layers, refining the structures of real roads and intersections. On the one hand, this multi-sub-layer modeling can express variations in the road network structure; on the other hand, it facilitates the proposed multi-layer route-planning algorithm, improving the overall routing efficiency.
- Based on the proposed road network model, an accelerated and refined lane-level route-planning method is proposed. First, a multi-layer route-planning algorithm is designed to plan sequentially at the road level, lane group level, lane section level, and lane level, resulting in remarkable improvements in routing efficiency, especially in large-scale road networks. Then, an optimal lane determination algorithm is developed at the lane level to find the optimal lanes while satisfying traffic rules and vehicle characteristics. The entire route-planning method can be seen as a framework compatible with existing algorithms, which means the existing graph search methods can be applied at the road and lane level to take advantage of the progress of existing research, and the routing efficiency can be dramatically improved compared to that of direct route planning using the graph search methods at the lane level. In addition, the proposed algorithm can better adapt to the changing road network structure and yield optimal lanes on roads with different configurations, including those with a constant or variable number of lanes. Tests were performed on simulated road networks and an actual road network. The results demonstrate the effectiveness, broader adaptability, and higher efficiency of the proposed algorithm compared with direct route planning, past hierarchical route planning, and the Apollo route-planning method. In particular, the efficiency can be improved by up to 96.1% compared with direct route planning using the graph search methods at the lane level. This study is complementary to existing studies and better supports autonomous vehicle navigation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: London, UK, 2013; 776p, ISBN 978-1-60807-005-3. [Google Scholar]
- Brügger, A.; Richter, K.-F.; Fabrikant, S.I. How does navigation system behavior influence human behavior? Cogn. Res. Princ. Implic. 2019, 4, 1. [Google Scholar] [CrossRef] [PubMed]
- Jiang, K.; Yang, D.; Liu, C.; Zhang, T.; Xiao, Z. A flexible multi-layer map model designed for lane-level route planning in autonomous vehicles. Engineering 2019, 5, 305–318. [Google Scholar] [CrossRef]
- Gyagenda, N.; Hatilima, J.V.; Roth, H.; Zhmud, V. A review of GNSS-independent UAV navigation techniques. Robot. Auton. Syst. 2022, 152, 104069. [Google Scholar] [CrossRef]
- Zhang, J.; Wen, W.; Huang, F.; Wang, Y.; Chen, X.; Hsu, L.-T. GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons. Appl. Sci. 2022, 12, 5193. [Google Scholar] [CrossRef]
- Upadhyay, V.; Balakrishnan, M. Monocular Localization Using Invariant Image Feature Matching to Assist Navigation. In Computers Helping People with Special Needs, Proceedings of the 18th International Conference, ICCHP-AAATE 2022, Lecco, Italy, 11–15 July 2022; Proceedings, Part I; Springer International Publishing: Cham, Switzerland, 2022; pp. 178–186. [Google Scholar]
- Zhang, Y.; Wang, L.; Jiang, X.; Zeng, Y.; Dai, Y. An efficient LiDAR-based localization method for self-driving cars in dynamic environments. Robotica 2022, 40, 38–55. [Google Scholar] [CrossRef]
- Zheng, L.; Li, B.; Yang, B.; Song, H.; Lu, Z. Lane-level road network generation techniques for lane-level maps of autonomous vehicles: A survey. Sustainability 2019, 11, 4511. [Google Scholar] [CrossRef]
- Sivaraman, S.; Trivedi, M.M. Dynamic probabilistic drivability maps for lane change and merge driver assistance. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2063–2073. [Google Scholar] [CrossRef]
- Schindler, A.; Maier, G.; Janda, F. Generation of high precision digital maps using circular arc splines. In Proceedings of the IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; pp. 246–251. [Google Scholar]
- Guo, C.; Meguro, J.I.; Kojima, Y.; Naito, T. Automatic lane-level map generation for advanced driver assistance systems using low-cost sensors. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 3875–3982. [Google Scholar]
- Bétalille, D.; Toledo-Moreo, R. Creating enhanced maps for lane-level vehicle navigation. IEEE Trans. Intell. Transp. Syst. 2010, 11, 786–798. [Google Scholar] [CrossRef]
- Zhang, T.; Arrigoni, S.; Garozzo, M.; Yang, D.; Cheli, F. A lane-level road network model with global continuity. Transp. Res. Part C Emerg. Technol. 2016, 71, 32–50. [Google Scholar] [CrossRef]
- Jo, K.; Sunwoo, M. Generation of a precise roadway map for autonomous cars. IEEE Trans. Intell. Transp. Syst. 2014, 15, 925–937. [Google Scholar] [CrossRef]
- Gwon, G.-P.; Hur, W.-S.; Kim, S.-W.; Seo, S.-W. Generation of a precise and efficient lane-level road map for intelligent vehicle systems. IEEE Trans. Veh. Technol. 2016, 66, 4517–4533. [Google Scholar] [CrossRef]
- DARPA. Urban Challenge: Route Network Definition File (RNDF) and Mission Data File (MDF) Formats; Defense Advanced Research Projects Agency: Arlington, VA, USA, 2007.
- NDS Open Lane Model 1.0 Release. Available online: http://www.openlanemodel.org/ (accessed on 19 June 2019).
- Dupuis, M.; Hekele, E.; Biehn, A. OpenDRIVE® v1.4 Format Specification; VIRES Simulationstechnologie GmbH: Bad Aibling, Germany, 2015. [Google Scholar]
- Zhu, Z.; Li, L.; Wu, W.; Jiao, Y. Application of improved Dijkstra algorithm in intelligent ship path planning. In Proceedings of the Chinese Control and Decision Conference, Kunming, China, 22–24 May 2021; pp. 4926–4931. [Google Scholar]
- Pandika, I.K.L.D.; Irawan, B.; Setianingsih, C. Apllication of optimization heavy traffic path with Floyd-Warshall algorithm. In Proceedings of the International Conference on Control Electronics Renewable Energy and Communications, Bandung, Indonesia, 5–7 December 2018; pp. 57–62. [Google Scholar]
- Candra, A.; Budiman, M.A.; Hartanto, K. Dijkstra’s and AStar in finding the shortest path: A tutorial. In Proceedings of theInternational Conference on Data Science, Artificial Intelligence and Business Analytics, Medan, Indonesia, 16–17 July 2020; pp. 28–32. [Google Scholar]
- Jangra, R.; Kait, R. Analysis and comparison among ant system ant colony system and Max-Min ant system with different parameters setting. In Proceedings of the International Conference on Computational Intelligence & Communication Technology, Ghaziabad, India, 9–10 February 2017; pp. 1–4. [Google Scholar]
- Xu, Z.; Liu, X.; Chen, Q. Application of improved Astar algorithm in global path planning of unmanned vehicles. In Proceedings of the Chinese Automation Congress, Hangzhou, China, 22–24 November 2019; pp. 2075–2080. [Google Scholar]
- Lee, M.; Yu, K. Dynamic path planning based on an improved ant colony optimization with genetic algorithm. In Proceedings of the IEEE Asia-Pacific Conference on Antennas and Propagation, Auckland, New Zealand, 5–8 August 2018; pp. 1–2. [Google Scholar]
- Jiang, C.; Fu, J.; Liu, W. Research on vehicle routing planning based on adaptive ant colony and particle swarm optimization algorithm. Int. J. Intell. Transp. Syst. Res. 2021, 19, 83–91. [Google Scholar] [CrossRef]
- Lan, X.; Lv, X.; Liu, W.; He, Y.; Zhang, X. Research on robot global path planning based on improved A-star ant colony algorithm. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; pp. 613–617. [Google Scholar]
- Rossi, F.; Zhang, R.; Hindy, Y.; Pavone, M. Routing autonomous vehicles in congested transportation networks: Structural properties and coordination algorithms. Auton. Robot. 2018, 42, 1427–1442. [Google Scholar] [CrossRef]
- Zheng, W.; Thangeda, P.; Savas, Y.; Ornik, M. Optimal routing in stochastic networks with reliability guarantees. In Proceedings of the IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3521–3526. [Google Scholar]
- Bailey, C.; Jones, B.; Clark, M.; Buck, R.; Harper, M. Electric Vehicle Autonomy: Realtime Dynamic Route Planning and Range Estimation Software. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 2696–2701. [Google Scholar]
- Bucher, D.; David, J.; Raubal, M. A heuristic for multi-modal route planning. In Progress in Location-Based Services 2016; Springer: Cham, Switzerland, 2017; pp. 211–229. [Google Scholar]
- Dibbelt, J.; Strasser, B.; Wagner, D. Customizable contraction hierarchies. J. Exp. Algorithmics 2016, 21, 1–49. [Google Scholar] [CrossRef]
- Wu, Y.; Song, W.; Cao, Z.; Zhang, J.; Lim, A. Learning improvement heuristics for solving routing problems. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 5057–5069. [Google Scholar] [CrossRef] [PubMed]
- Kanakagiri, A. Development of a Virtual Simulation Environment for Autonomous Driving Using Digital Twins. Ph.D. Thesis, Technische Hochschule Ingolstadt, Ingolstadt, Germany, 2021. [Google Scholar]
- That, T.N.; Casas, J. An integrated framework combining a traffic simulator and a driving simulator. Procedia Soc. Behav. Sci. 2011, 20, 648–655. [Google Scholar] [CrossRef]
- Available online: https://github.com/ApolloAuto/apollo (accessed on 12 October 2022).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Existing Map Models | The Proposed Model (Referred to Here as A)’s Differences and Advantages Compared to Those of the Existing Model (Referred to Here as B) |
|---|---|
| RNDF | A can express possible changes in the number of lanes on one road, but B cannot. |
| The model proposed by Bétaille et al. [12] | A contains the intersection model, but B ignores it, which is a basic requirement for lane-level route planning. |
| The model proposed by Jiang K et al. [3] | A can express possible changes in the number of lanes on one road, but B cannot. |
| OpenDRIVE | Compared with B, A defines lane groups and the point layer in the road area. In addition, the designed intersection area contains five sub-layers that hierarchically represent the connections within the intersection. |
| Parameter | Value |
|---|---|
| The number of lanes in one lane section | 3 |
| The number of lane sections in one lane group | 1 |
| The number of lane groups in one road | 2 |
| Lane width | 3.5 m |
| Intersection width | 24 m |
| The average speed of each road: (km/h) | Randomly chosen from |
| The average speed of each lane: (km/h) | Inner: ; middle: ; outer: |
| The traffic rules designed for the lanes | Inner: left; middle: forward; outer: right |
| Number of Lanes | Routing Method | Time Saved (%) | |
|---|---|---|---|
| 288 | Direct lane-level route planning | 61 | |
| Lane-level route planning proposed in Ref. [3] | 38 | 37.7 | |
| Lane-level route planning in this study | 20 | 67.2 | |
| 705 | Direct lane-level route planning | 383 | |
| Lane-level route planning proposed in Ref. [3] | 77 | 79.9 | |
| Lane-level route planning in this study | 35 | 90.1 | |
| 10,088 | Direct lane-level route planning | 7832 | |
| Lane-level route planning proposed in Ref. [3] | 535 | 93.2 | |
| Lane-level route planning in this study | 304 | 96.1 |
| Number of Lanes | Routing Method | Time Saved (%) | |
|---|---|---|---|
| 323 | Routing algorithm of Apollo | 132 | |
| Routing algorithm in this study | 29 | 78.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, K.; Ding, H.; Xu, N.; Guo, K. Accelerated and Refined Lane-Level Route-Planning Method Based on a New Road Network Model for Autonomous Vehicle Navigation. World Electr. Veh. J. 2023, 14, 98. https://doi.org/10.3390/wevj14040098
He K, Ding H, Xu N, Guo K. Accelerated and Refined Lane-Level Route-Planning Method Based on a New Road Network Model for Autonomous Vehicle Navigation. World Electric Vehicle Journal. 2023; 14(4):98. https://doi.org/10.3390/wevj14040098
Chicago/Turabian StyleHe, Ke, Haitao Ding, Nan Xu, and Konghui Guo. 2023. "Accelerated and Refined Lane-Level Route-Planning Method Based on a New Road Network Model for Autonomous Vehicle Navigation" World Electric Vehicle Journal 14, no. 4: 98. https://doi.org/10.3390/wevj14040098
APA StyleHe, K., Ding, H., Xu, N., & Guo, K. (2023). Accelerated and Refined Lane-Level Route-Planning Method Based on a New Road Network Model for Autonomous Vehicle Navigation. World Electric Vehicle Journal, 14(4), 98. https://doi.org/10.3390/wevj14040098