
Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban and Regional Delivery in Germany—A Real-World Case Study


Abstract
:1. Introduction
2. Data and Methodology
2.1. Operational Vehicle Data
2.2. Methodology
2.2.1. Energy Simulation
2.2.2. Assumptions and Premises
2.2.3. Feasibility Calculations and Scenarios
3. Results
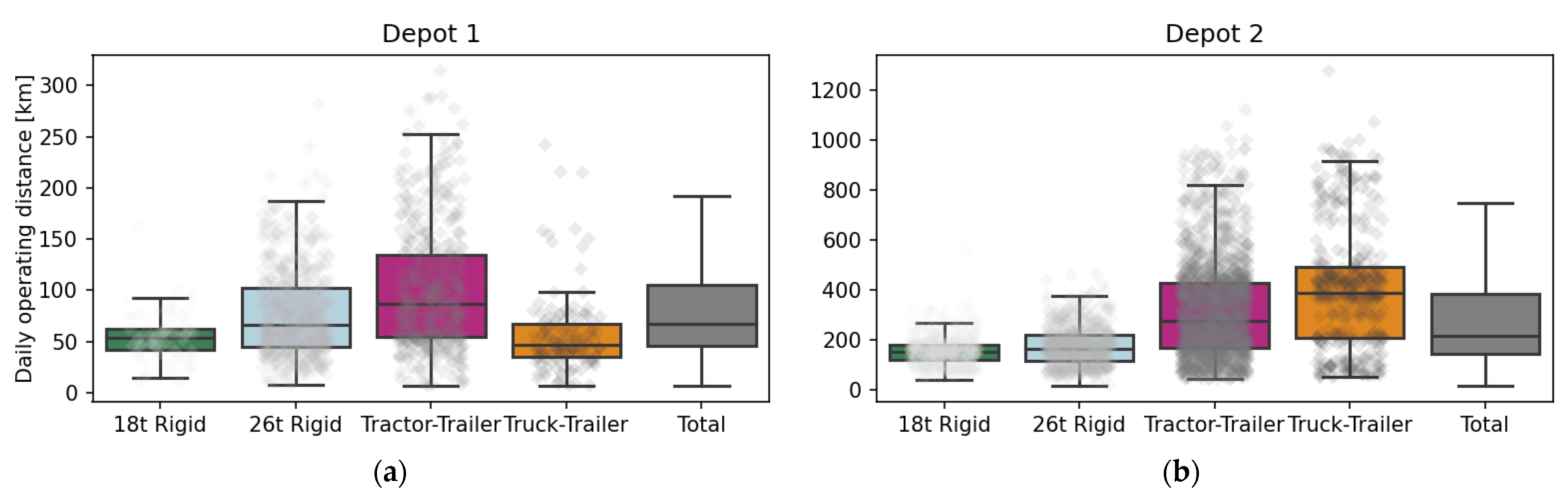
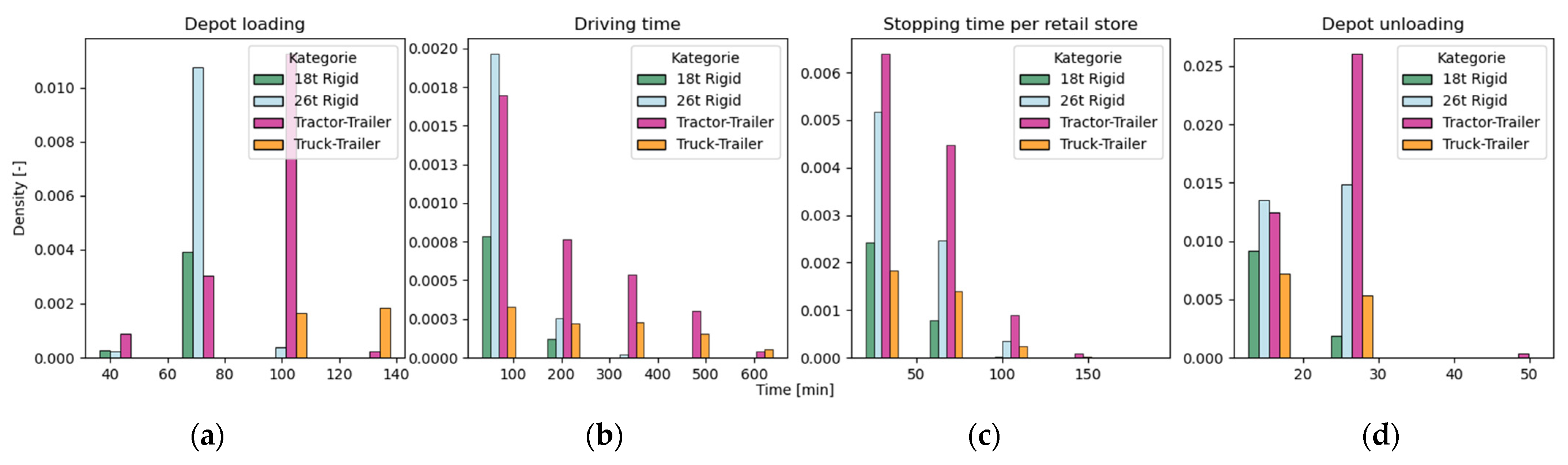
3.1. Operating Patterns: Daily Mileage and Timestamps
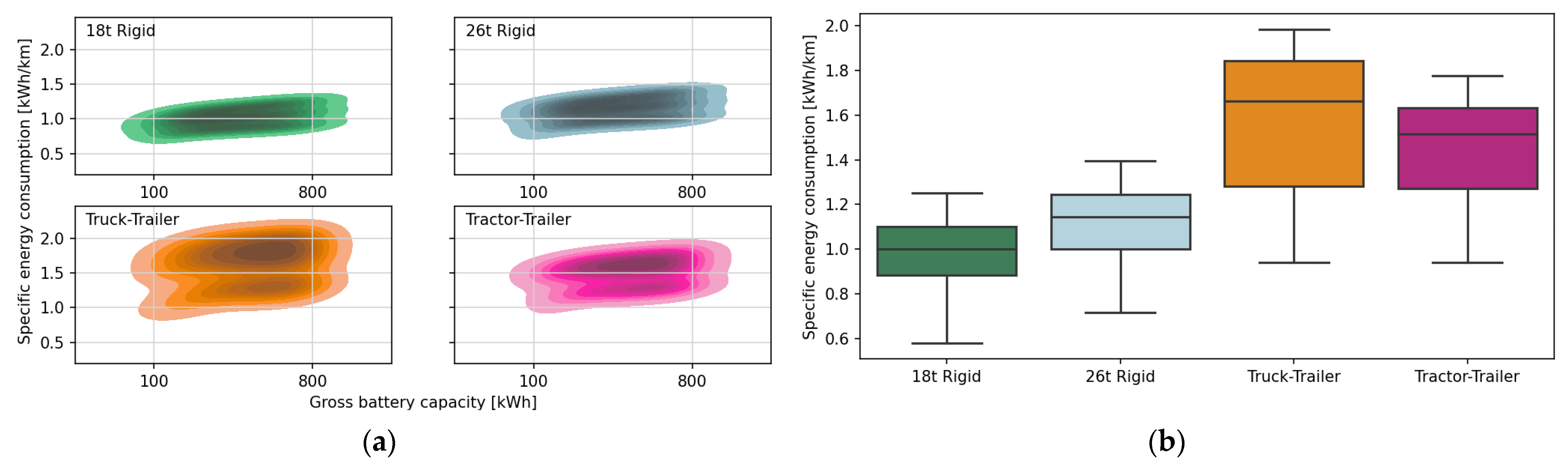
3.2. Simulation Results: Specific Energy Consumption
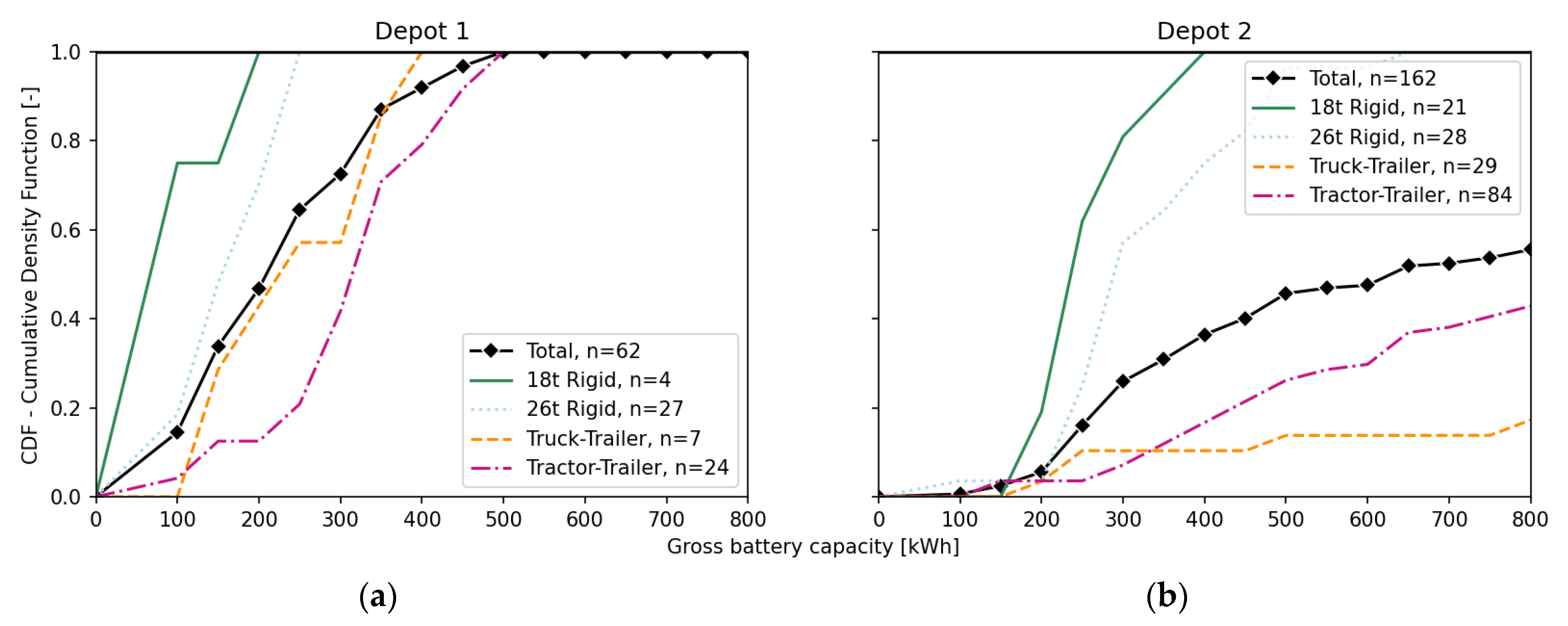
3.3. Scenario 0: Technical Feasibility without Intermediate Charging
3.4. Scenario 1: Technical Feasibility with Intermediate Depot Charging
3.5. Scenario 2: Technical Feasibility with Intermediate Charging at the Depot and Customer Retail Stores
4. Discussion
5. Conclusions and Recommendations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BET | Heavy-duty battery-electric trucks |
| GHG | Greenhouse gas |
| GVW | Gross vehicle weight |
| SoC | State of charge (battery) |
| SoH | State of health (battery) |
| tkm | ton-kilometers |
References
- European Commission. EU Transport in Figures: Statistical Pocketbook 2020; European Commision: Luxembourg, 2020; Available online: https://op.europa.eu/en/publication-detail/-/publication/da0cd68e-1fdd-11eb-b57e-01aa75ed71a1 (accessed on 1 August 2022).
- Mareev, I.; Becker, J.; Sauer, D. Battery Dimensioning and Life Cycle Costs Analysis for a Heavy-Duty Truck Considering the Requirements of Long-Haul Transportation. Energies 2018, 11, 55. [Google Scholar] [CrossRef]
- Phadke, A.; Khandekar, A.; Abhyankar, N.; Wooley, D.; Rajagopal, D. Why Regional and Long-Haul Trucks are Primed for Electrification Now; Lawrence Berkeley National Laboratory: Berkeley, CA, USA, 2021; Available online: https://escholarship.org/uc/item/3kj8s12f (accessed on 1 August 2022).
- Nykvist, B.; Olsson, O. The feasibility of heavy battery electric trucks. Joule 2021, 5, 901–913. [Google Scholar] [CrossRef]
- International Energy Agency. Global EV Outlook 2021: Accelerating Ambitions Despite the Pandemic; International Energy Agency: Paris, France, 2021; Available online: https://iea.blob.core.windows.net/assets/ed5f4484-f556-4110-8c5c-4ede8bcba637/GlobalEVOutlook2021.pdf (accessed on 1 August 2022).
- Transport and Environment. Easy Ride: Why the EU Truck CO2 Targets Are Unfit for the 2020s; Transport and Environment: Brussels, Belgium, 2021. [Google Scholar]
- Basma, H.; Beys, Y.; Rodriguez, F. Battery Electric Tractor-Trailers in the European Union: A Vehicle Technology Analysis; ICCT: Berlin, Germany, 2021; Available online: https://theicct.org/sites/default/files/publications/eu-tractor-trailers-analysis-aug21-2.pdf (accessed on 1 August 2022).
- Zayer, E.; Gnamm, J.; Strempel, K.; Di Loreto, G.; Johansson, M. European Truck Market Outlook 2022; Bain & Company: Munich, Germany, 2022. [Google Scholar]
- Youngeun, B.; Suman Kumar, M.; Craig, R.R.; Stephen, G.R. Factors influencing alternative fuel adoption decisions in heavy-duty vehicle fleets. Transp. Res. Part D Transp. Environ. 2022, 102, 103150. [Google Scholar] [CrossRef]
- Hildermeier, J.; Jahn, A.; Rodriguez, F. Electrifiying EU City Logistics: An Analysis of Energy Demand and Charging Cost; ICCT: Berlin, Germany, 2020; Available online: https://theicct.org/sites/default/files/publications/EU-logistics-electrification-fv-202011.pdf (accessed on 1 August 2022).
- Liimatainen, H.; van Vliet, O.; Aplyn, D. The potential of electric trucks—An international commodity-level analysis. Appl. Energy 2019, 236, 804–814. [Google Scholar] [CrossRef]
- Çabukoglu, E.; Georges, G.; Küng, L.; Pareschi, G.; Boulouchos, K. Battery electric propulsion: An option for heavy-duty vehicles? Results from a Swiss case-study. Transp. Res. Part C Emerg. Technol. 2018, 88, 107–123. [Google Scholar] [CrossRef]
- Mauler, L.; Dahrendorf, L.; Duffner, F.; Winter, M.; Leker, J. Cost-effective technology choice in a decarbonized and diversified long-haul truck transportation sector: A U.S. case study. J. Energy Storage 2022, 46, 103891. [Google Scholar] [CrossRef]
- European Environment Agency. Monitoring of CO2 Emissions from Heavy-Duty Vehicles: Flattened HDV 2019–20 Data; European Environment Agency: Copenhagen, Denmark, 2021. [Google Scholar]
- HERE Truck Navigation. Available online: https://developer.here.com/documentation/android-premium/dev_guide/topics/routing-truck.html (accessed on 1 August 2022).
- Sripad, S.; Viswanathan, V. Performance Metrics Required of Next-Generation Batteries to Make a Practical Electric Semi Truck. ACS Energy Lett. 2017, 2, 1669–1673. [Google Scholar] [CrossRef]
- NREL DriveCAT. Chassis Dynamometer Drive Cycles. Available online: www.nrel.gov/transportation/drive-cycle-tool (accessed on 30 September 2021).
- Delgado, O.; Rodriguez, F.; Muncrief, R. Fuel Efficiency Technology in European Heavy-Duty Vehicles: Baseline and Potential for the 2020–2030 Timeframe; ICCT: Berlin, Germany, 2017. [Google Scholar]
- Gao, Z.; Lin, Z.; Davis, S.C.; Birky, A.K. Quantitative Evaluation of MD/HD Vehicle Electrification using Statistical Data. Transp. Res. Rec. 2018, 2672, 109–121. [Google Scholar] [CrossRef]
- Löbberding, H.; Wessel, S.; Offermanns, C.; Kehrer, M.; Rother, J.; Heimes, H.; Kampker, A. From Cell to Battery System in BEVs: Analysis of System Packing Efficiency and Cell Types. World Electr. Veh. J. 2020, 11, 77. [Google Scholar] [CrossRef]
- European Commission. Vehicle Energy Consumption Calculation TOOL (VECTO); European Commission: Luxembourg, 2019. [Google Scholar]
- Doppelbauer, M. Grundlagen der Elektromobilität: Technik, Praxis, Energie und Umwelt; Springer Professional: Wiesbaden, Germnay, 2020; ISBN 978-3-658-29730-5. [Google Scholar]
- Van Basshuysen, R.; Schäfer, F. Handbuch Verbrennungsmotor: Grundlagen, Komponenten, Systeme, Perspektiven, 7th ed.; Springer Professional: Wiesbaden, Germany, 2015. [Google Scholar]
- P3 automotive GmbH. P3 Charging Index—Update 2021: Comparison of the Fast Charging Capability of Different Electric Vehicles from an User Perspective; P3 Group GmbH: Stuttgart, Germany, 2021. [Google Scholar]
- Federal Transport Authority (KBA). Bestand an Kraftfahrzeugen und Kraftfahrzeuganhängern am 1. Januar 2021 Nach Bundesländern und Fahrzeugklassen Absolut: FZ 27; KBA: Flensburg, Germany, 2021; Available online: https://www.kba.de/DE/Statistik/Produktkatalog/produkte/Fahrzeuge/fz27_b_uebersicht.html (accessed on 27 September 2021).
- Göckeler, K.; Hacker, F.; Mottschall, M.; Blanck, R.; Görz, W.; Kasten, P.; Bernecker, T.; Heinzelmann, J. Status Quo und Perspektiven Alternativer Antriebstechnologien für den Schweren Straßengüterverkehr: Erster Teilbericht des Forschungs-und Dialogvorhabens „StratES: Strategie für die Elektrifizierung des Straßengüterverkehr“; Öko-Institut e.V.: Berlin, Germany, 2020. [Google Scholar]
- Federal Transport Authority (KBA). Verkehr in Kilometern (VK): Zeitreihe Jahre 2014 bis 2020. Available online: https://www.kba.de/DE/Statistik/Kraftverkehr/VerkehrKilometer/vk_inlaenderfahrleistung/vk_inlaenderfahrleistung_node.html (accessed on 30 September 2021).
- Wermuth, M.; Neef, C.; Wirth, R.; Hanitz, I.; Löhner, H.; Hautzinger, H.; Stock, W.; Pfeiffer, M.; Fuchs, M.; Lenz, B.; et al. Mobilitätstudie „Kraftfahrzeugverkehr in Deutschland 2010“ (KiD 2010) 70.0829/2008; WVI, IVT, DLR, KBA: Braunschweig, Germany, 2012; Available online: https://www.bmvi.de/SharedDocs/DE/Anlage/G/kid-2010.pdf?__blob=publicationFile (accessed on 2 May 2021).
- Basma, H.; Saboori, A.; Rodriguez, F. Total Cost of Ownership for Tractor-Trailers in Europe: Battery Electric versus Diesel; ICCT: Berlin, Germany, 2021. [Google Scholar]
- Basma, H.; Rodriguez, F.; Hildermeier, J.; Jahn, A. Electrifying Last-Mile Delivery: A Total Cost of Ownership Comparison of Battery-Electric and Diesel Trucks in Europe; ICCT: Berlin, Germany, 2022. [Google Scholar]
- Federal Ministry for Digital and Transport. Richtlinie Über die Förderung von Leichten und Schweren Nutzfahrzeugen Mit Alternativen, Klimaschonenden Antrieben und Dazugehöriger Tank-und Ladeinfrastruktur: Richtlinie KsNI; Federal Ministry for Digital and Transport: Berlin, Germany, 2021. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | 18-t Rigid | 26-t Rigid | Truck-Trailer | Tractor-Trailer | Source |
|---|---|---|---|---|---|---|
| [kg] | 5761–6475–7125 | 8239–8679–9073 | 8239–8679–9073 | 5761–6475–7125 | Q25-Q50-Q75 [14] | |
| [kg] | - | - | 6500 ± 20% | 8500 ± 20% | derived from [18] | |
| [m2] | 5.559–5.698–5.837 | 5.463–5.997–5.737 | 6.557–7.839–9.179 | 5.559–5.698–5.837 | Q25-Q50-Q75 [14] | |
| [N/kN] | 5.5–5.7–6.9 | 5.0–5.6–6.8 | 5.0–5.6–6.8 | 4.9–5.1–6.5 | Q25-Q50-Q75 [14] | |
| [kW] | 2.97 ± 20% | 3.39 ± 20% | 4.32 ± 20% | 4.11 ± 20% | [18,19] | |
| [kW] | 3.11 ± 20% | 3.11 ± 20% | 5.90 ± 20% | 5.14 ± 20% | ATP/DIN 8959 | |
| [kW] | 200–228–265 | 265–323–350 | 265–323–350 | 331–355–368 | Q25-Q50-Q75 [14] | |
| [m/s] | 0.413 | 0.417 | 0.744 | 0.677 | [-] |
| Parameter | Unit | Value/Value Range | Source |
|---|---|---|---|
| [%] | 90% ± 5 % | [13] | |
| [Wh/kg] | 150–175–225 | [13,16,20] | |
| [%] | 50% ± 10% | [16] | |
| [m/s2] | Urban: 0.331 ± 20%, Regional: 0.160 ± 20% | Q25 and Q75 [17] | |
| [%] | (90% ± 2.5%) | [13,16] | |
| [%] | 97% | [16] | |
| [m/s] | (3 ± 20%) | Based on [16] and VECTO [21] | |
| [kWh] | 30 | Own assumption | |
| [kg/m3] | 1.15–1.225–1.3 | Own assumption | |
| [kg/kW] | 1.43 | [22] | |
| [kg] | (108 kg) = 408 kg | Based on [2] | |
| [kg/kW] | 3.3 | [23] | |
| [kg] | Base value from the truck schedule (± 20%) | ||
| [kW] | |||
| [kW] | 150 | ||
| [%] | 75% ±10% | Own assumption | |
| [%] | 68.1% (184/270)–82% (164/200)–92.6% (250/270) | [24] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Link, S.; Plötz, P. Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban and Regional Delivery in Germany—A Real-World Case Study. World Electr. Veh. J. 2022, 13, 161. https://doi.org/10.3390/wevj13090161
Link S, Plötz P. Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban and Regional Delivery in Germany—A Real-World Case Study. World Electric Vehicle Journal. 2022; 13(9):161. https://doi.org/10.3390/wevj13090161
Chicago/Turabian StyleLink, Steffen, and Patrick Plötz. 2022. "Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban and Regional Delivery in Germany—A Real-World Case Study" World Electric Vehicle Journal 13, no. 9: 161. https://doi.org/10.3390/wevj13090161
APA StyleLink, S., & Plötz, P. (2022). Technical Feasibility of Heavy-Duty Battery-Electric Trucks for Urban and Regional Delivery in Germany—A Real-World Case Study. World Electric Vehicle Journal, 13(9), 161. https://doi.org/10.3390/wevj13090161