
Performance Comparison of High-Speed Motors for Electric Vehicle



Abstract
:1. Introduction
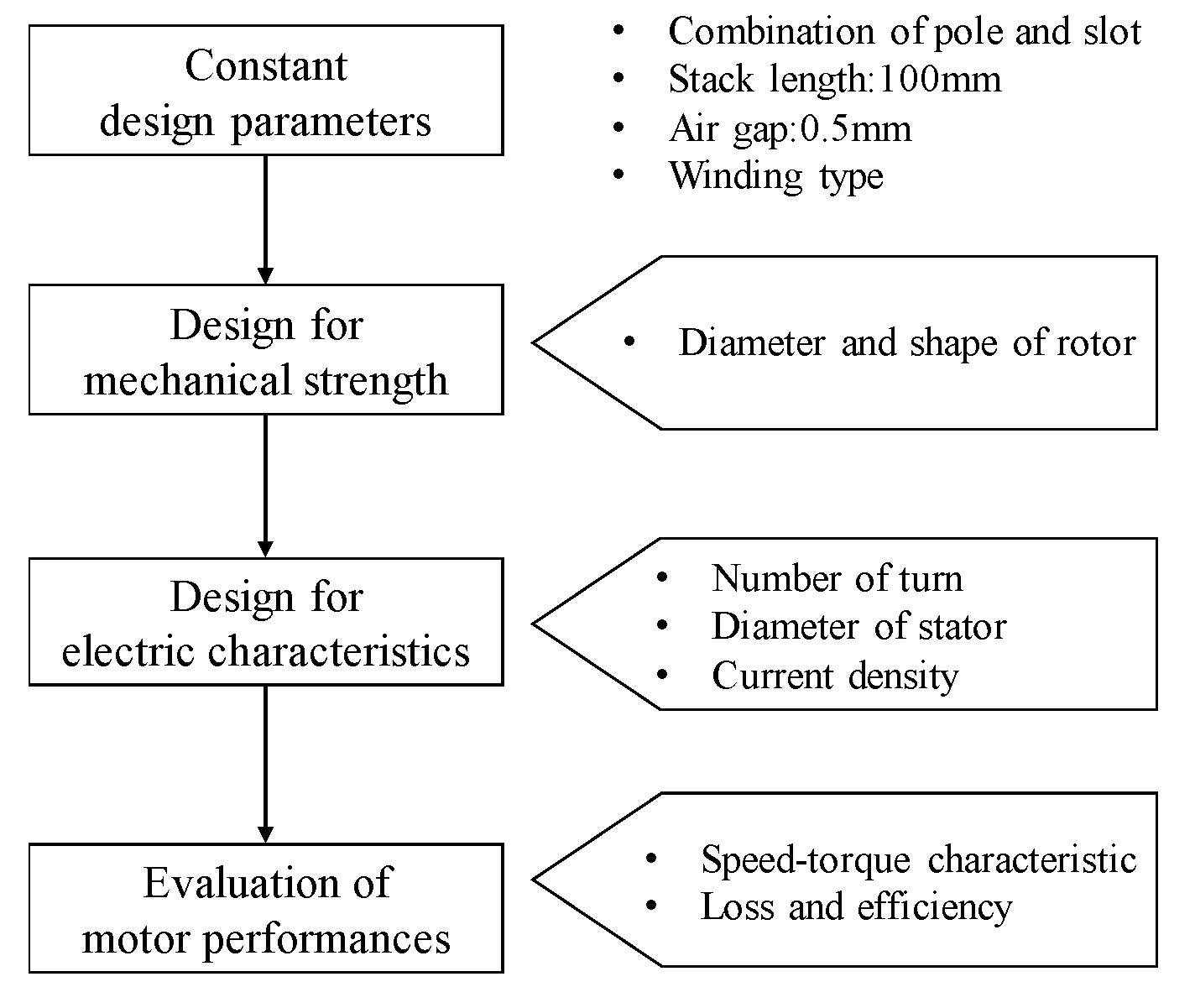
2. Target Performances and Design Flow
3. Design of PMSM
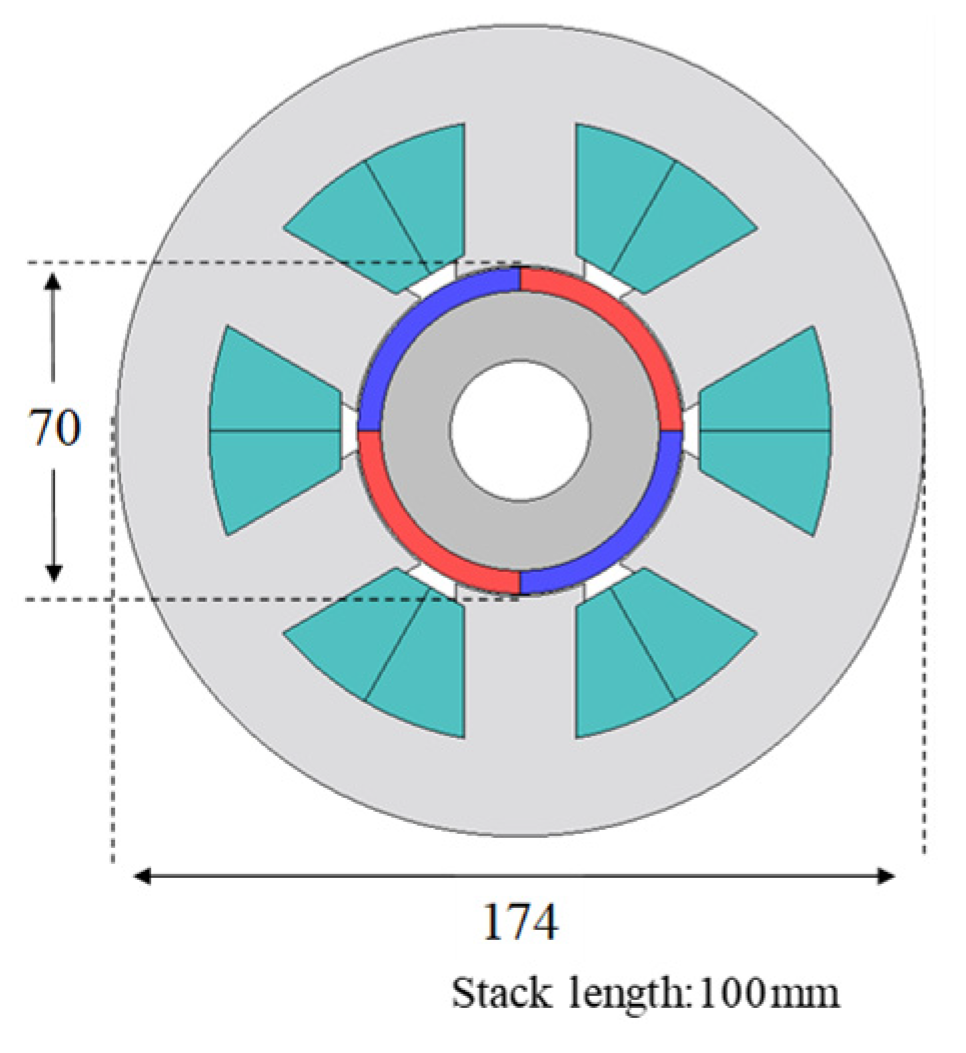
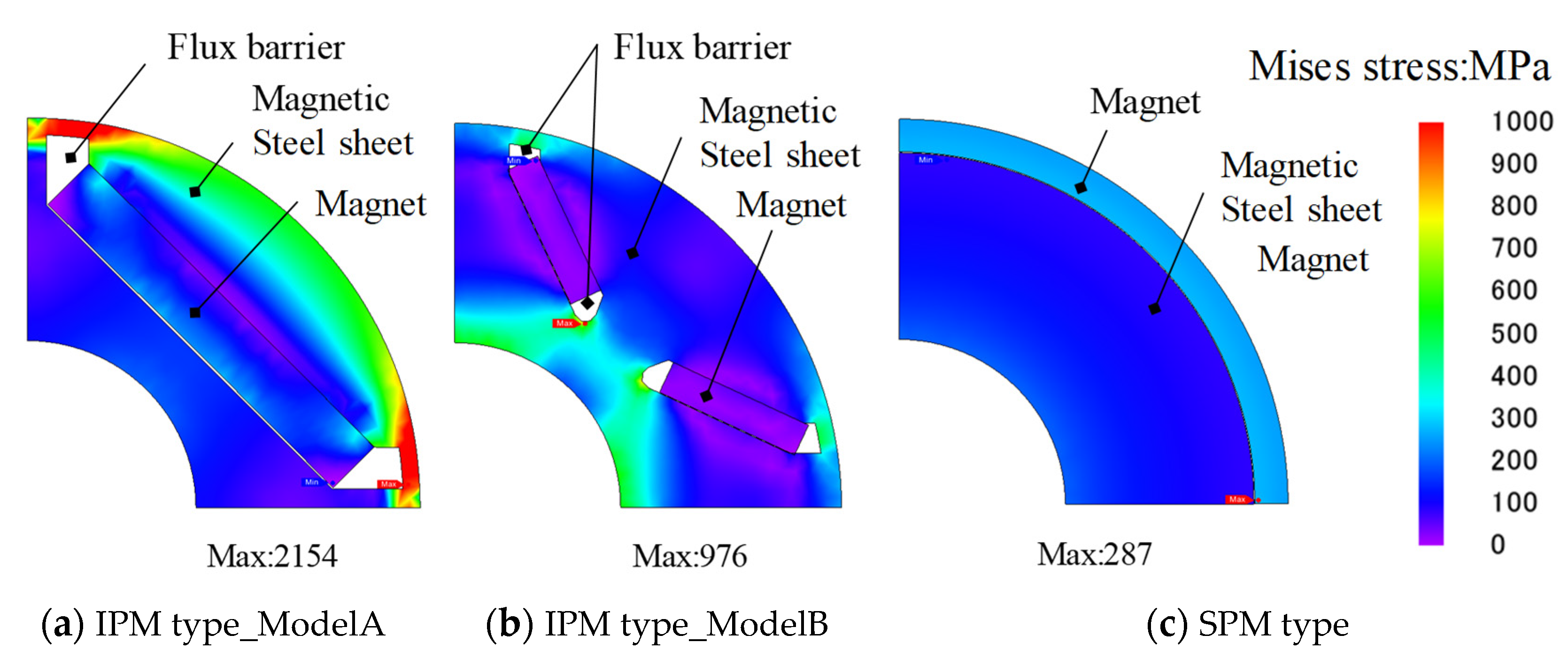
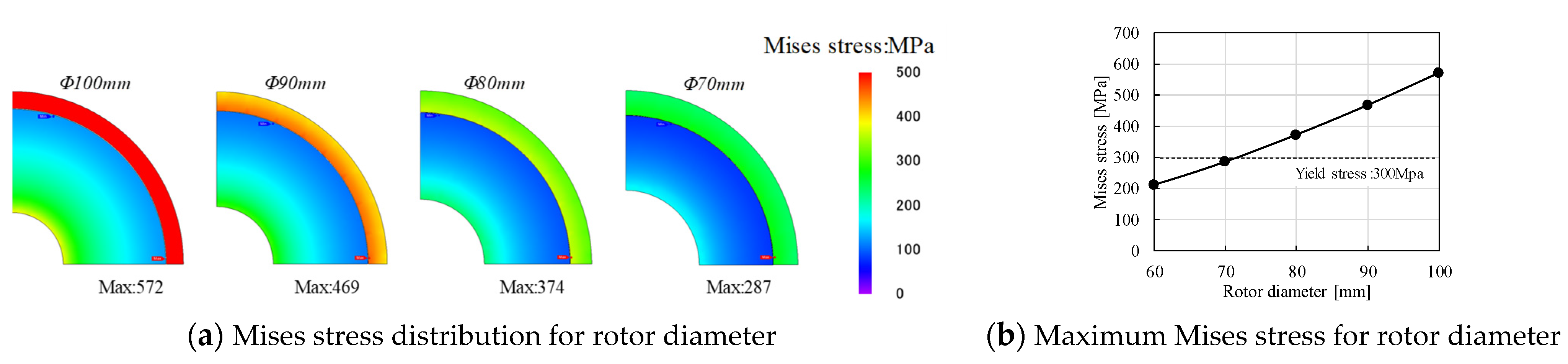
3.1. Mechanical Design of PMSM
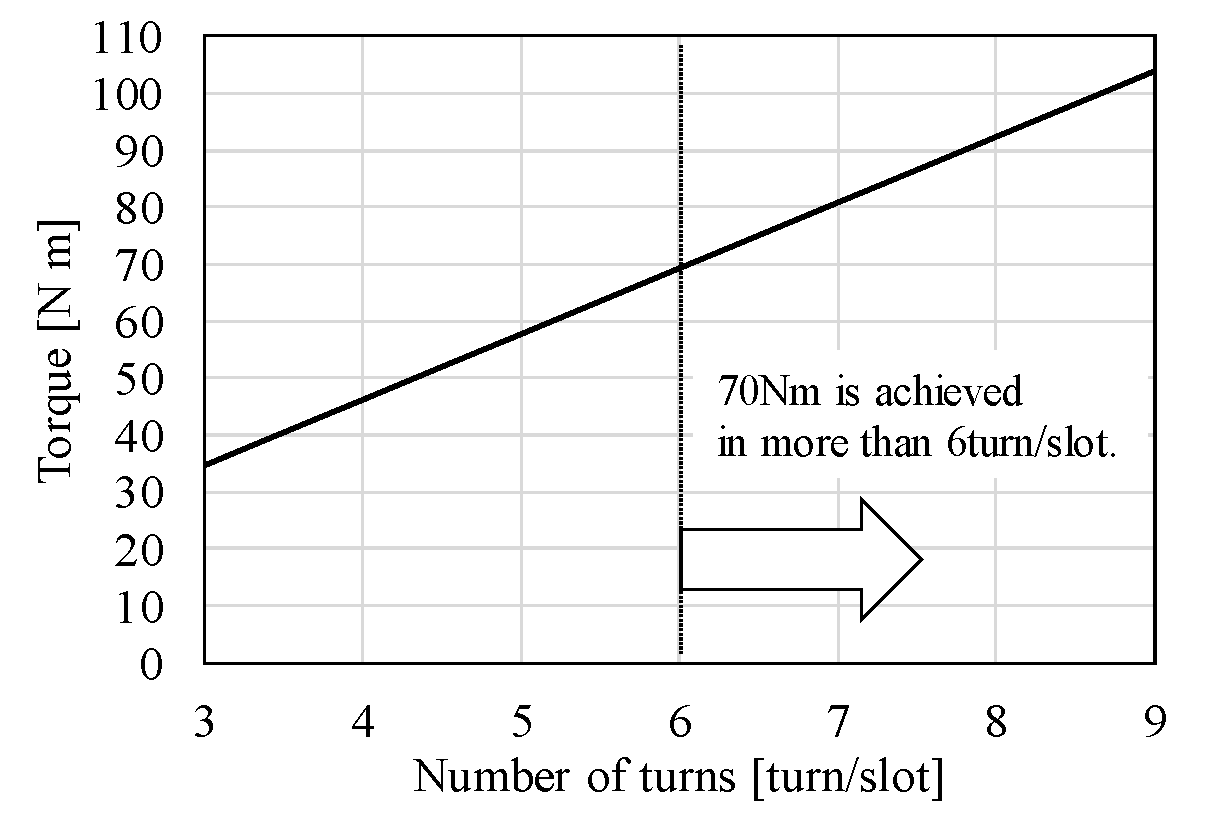
3.2. Electrical Design of PMSM
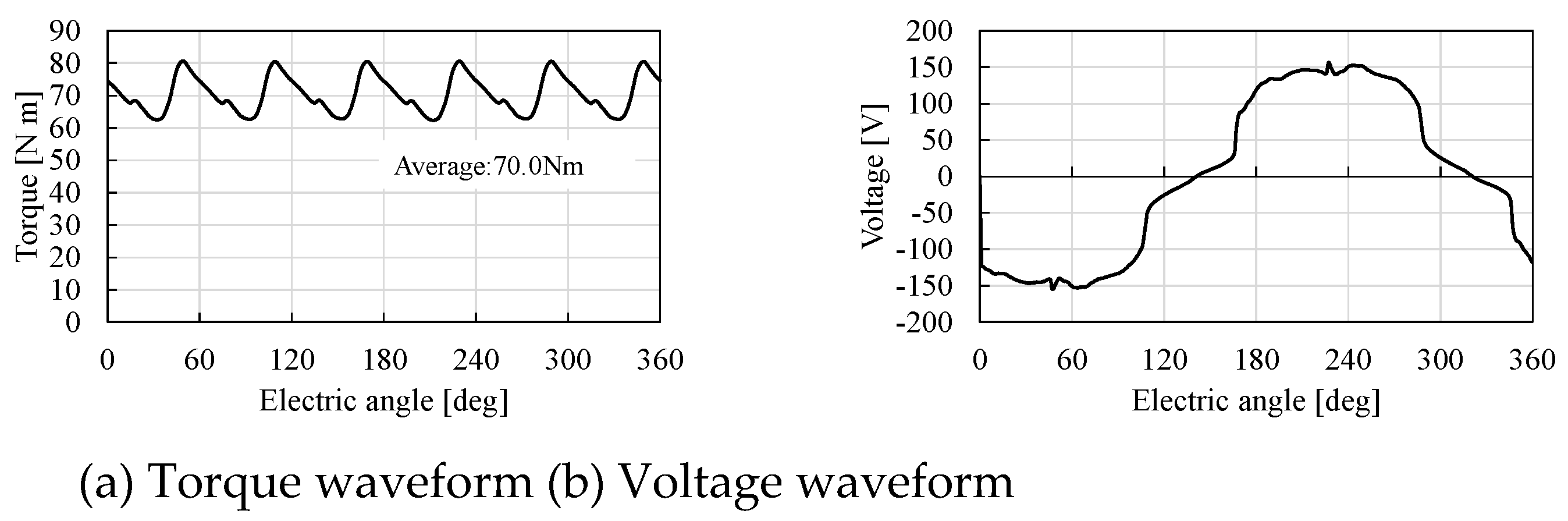
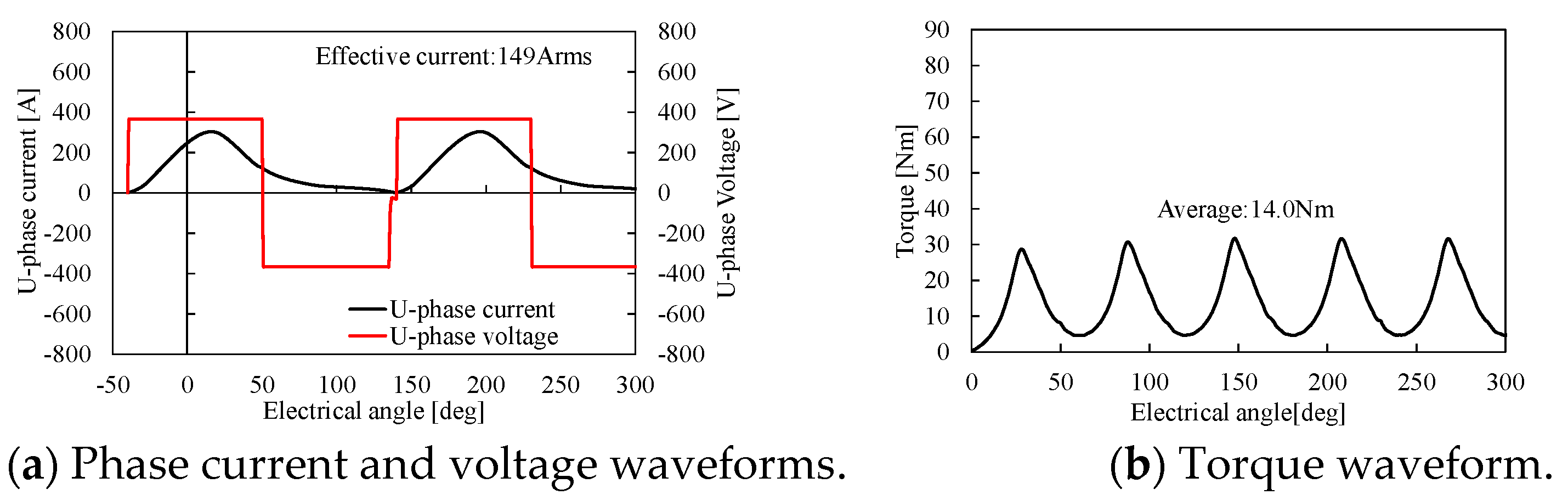
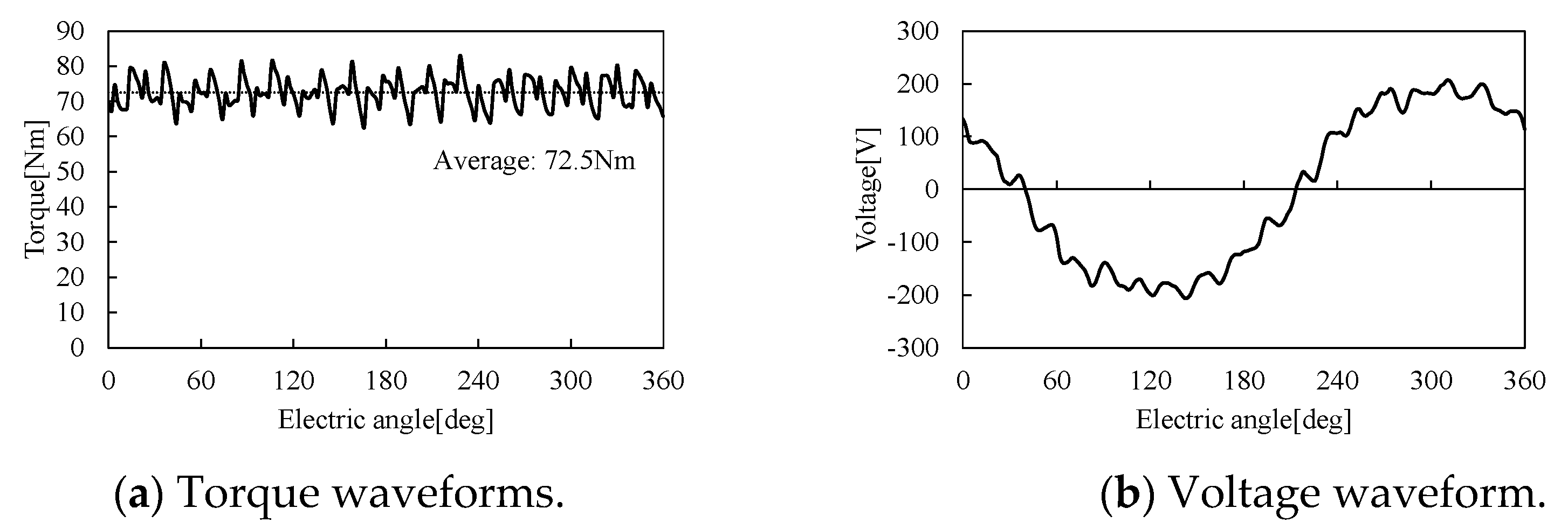
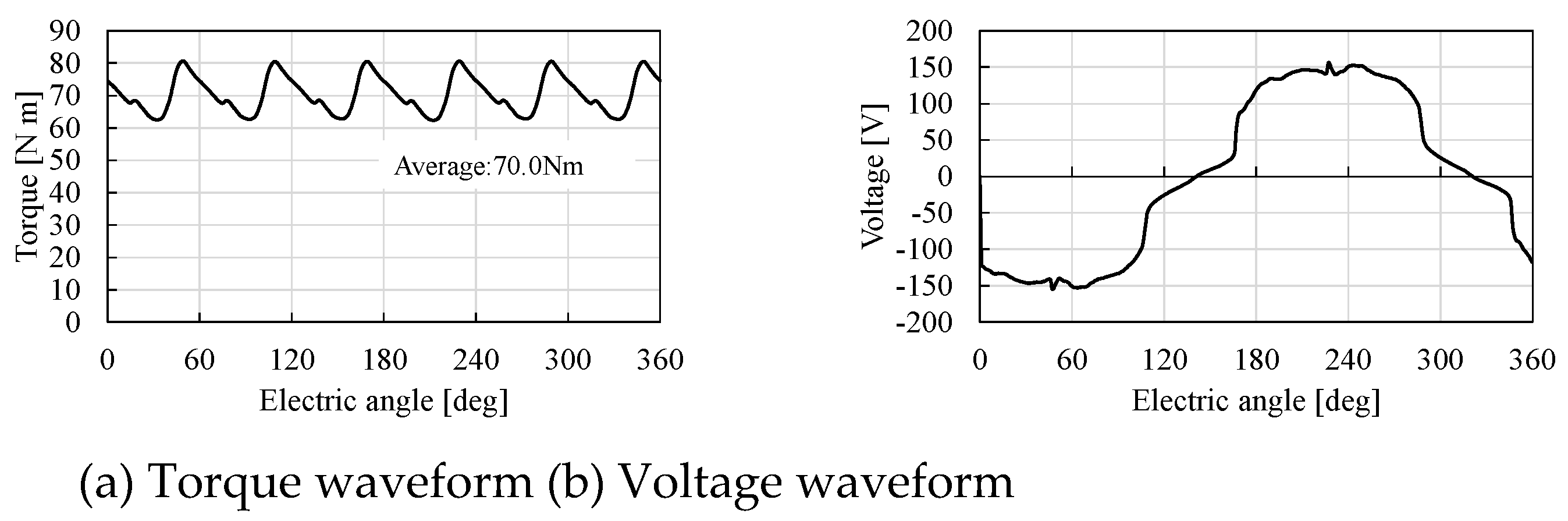
3.3. Torque and Phase Voltage at Required Speed of PMSM
4. Design of SRM
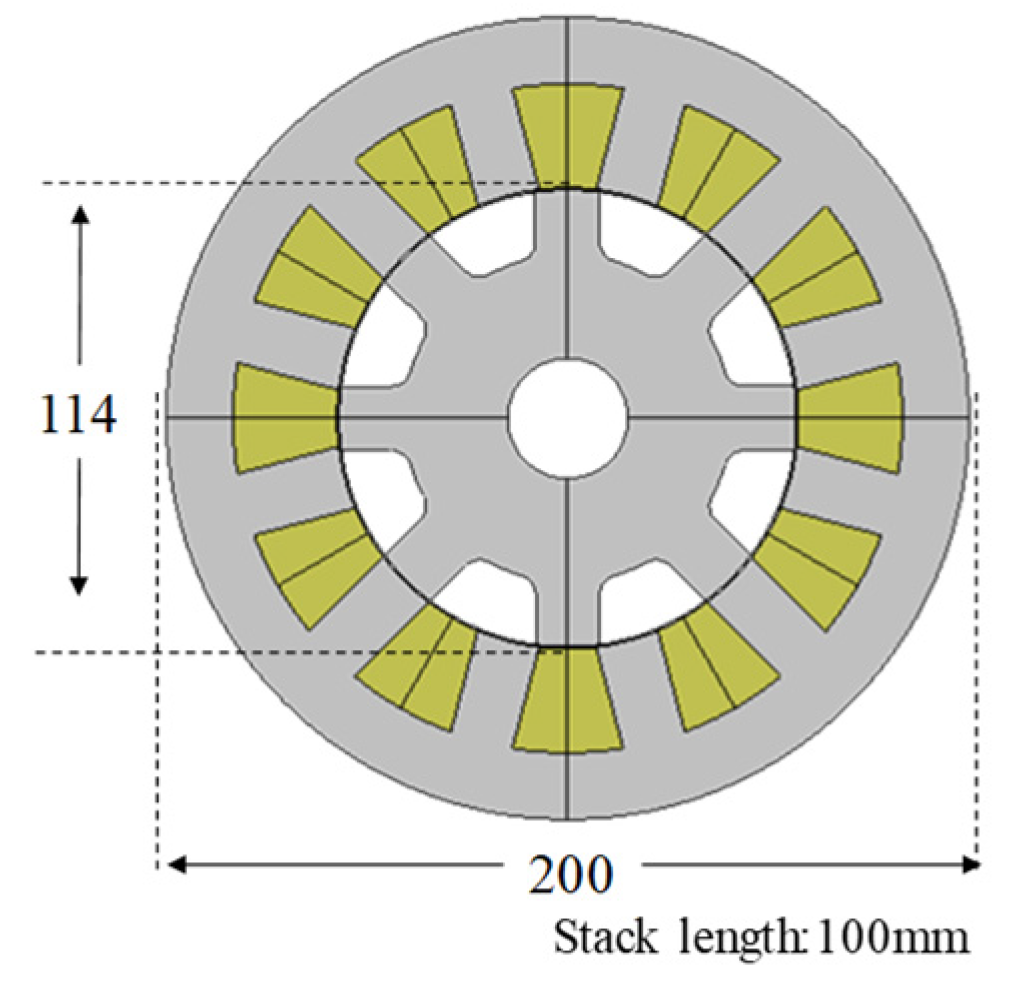
4.1. Mechanical Design of SRM
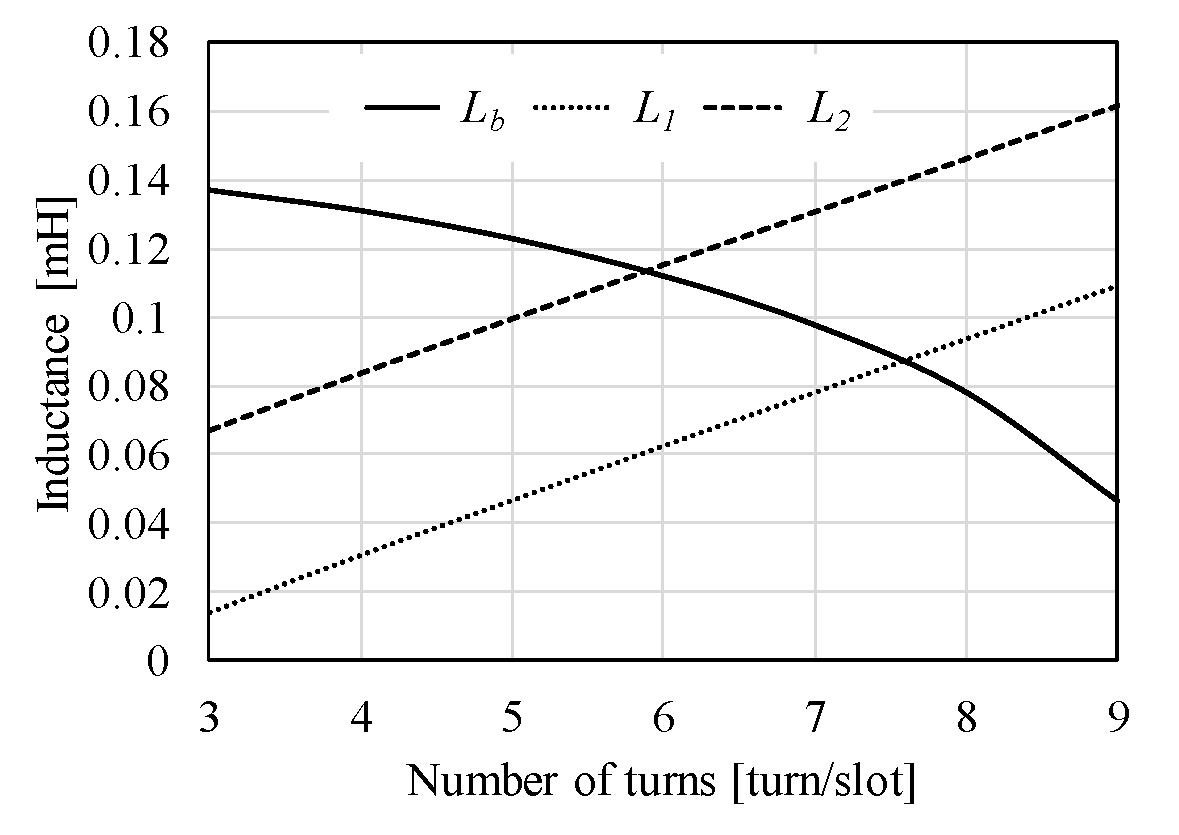
4.2. Electrical Design of SRM
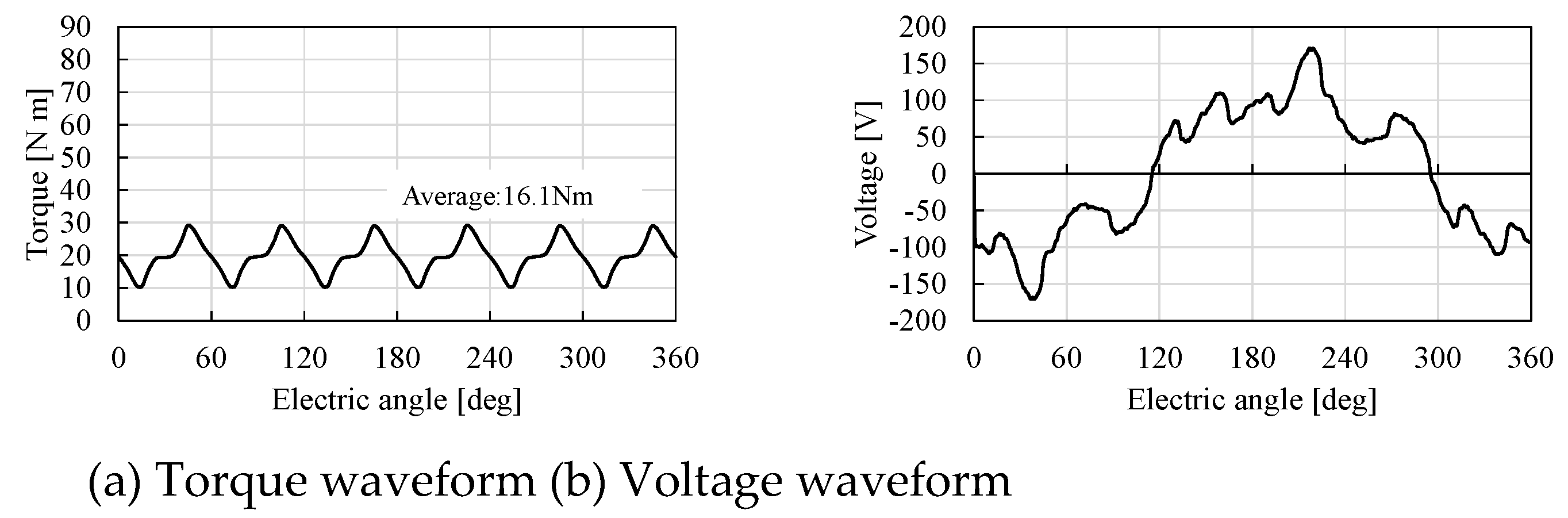
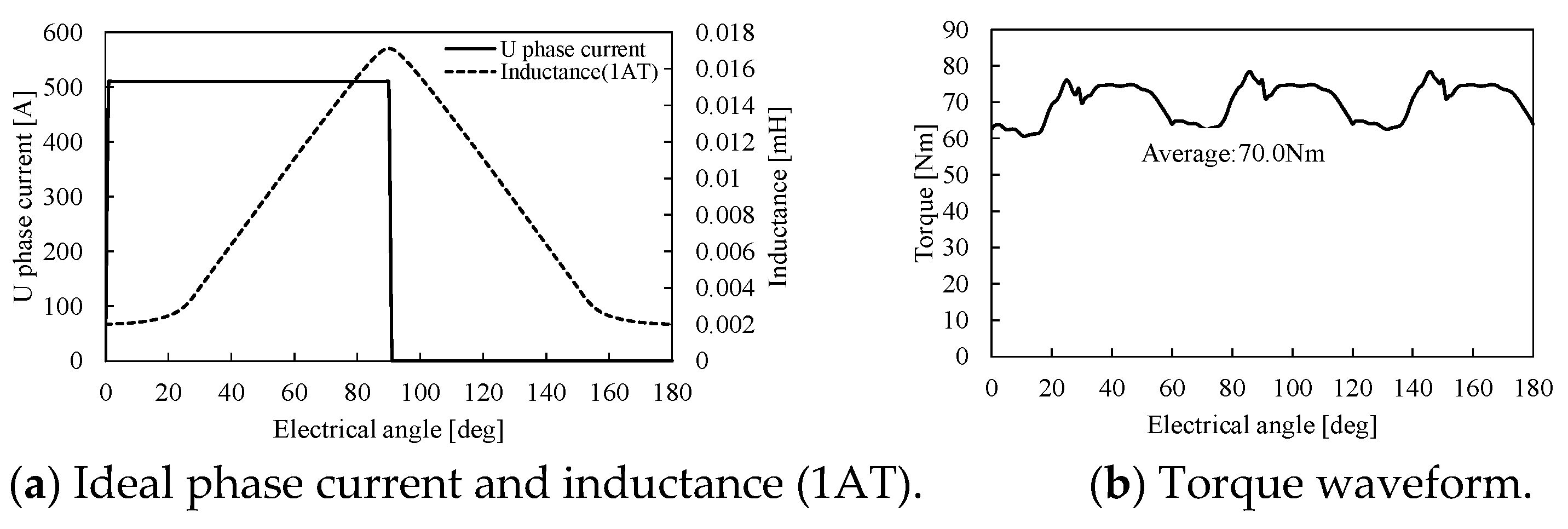
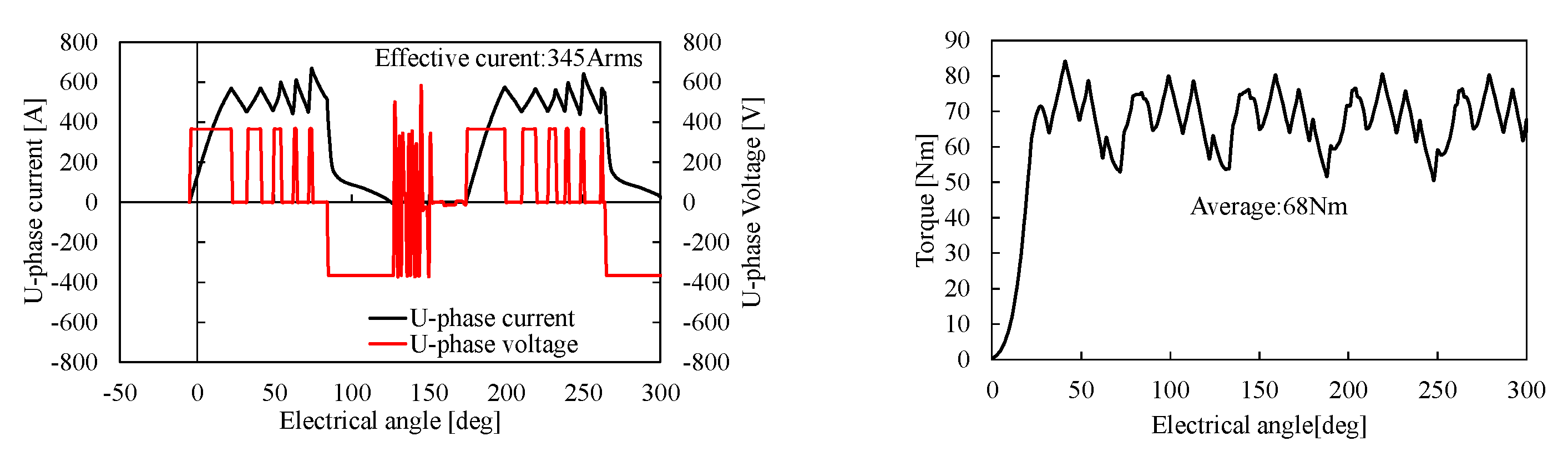
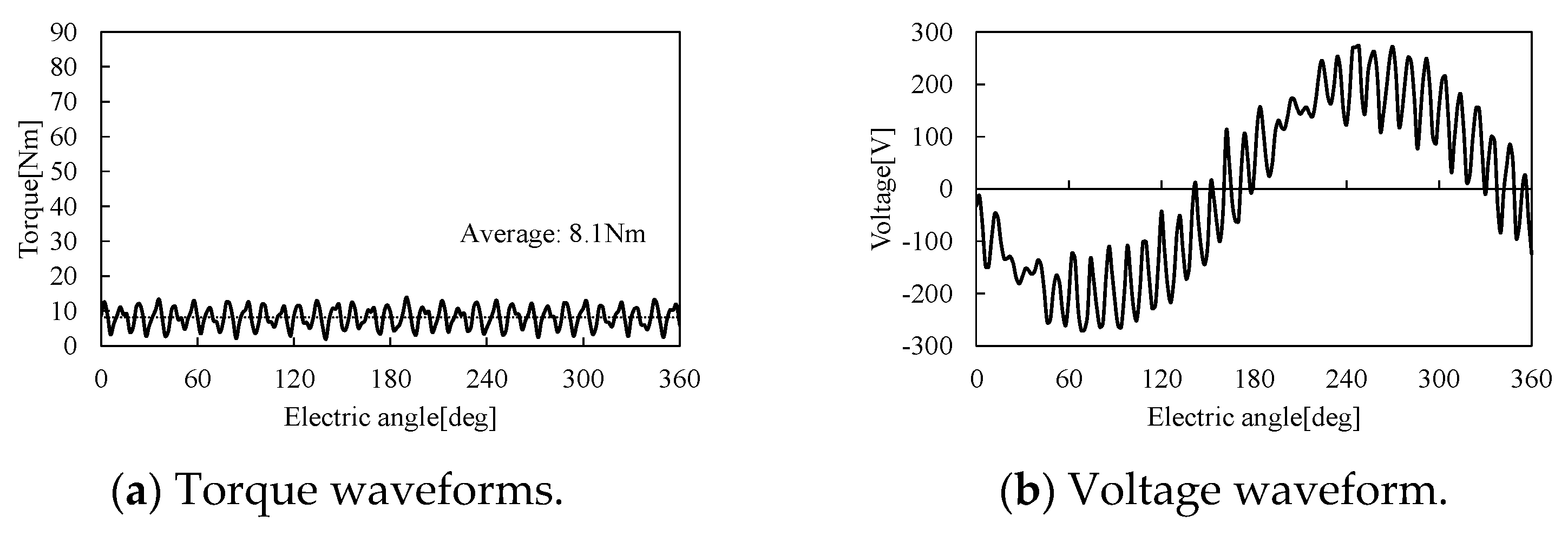
4.3. Torque and Phase Voltage at Required Speed of SRM
5. Design of IM
5.1. Mechanical Design of IM
5.2. Electrical Design of IM
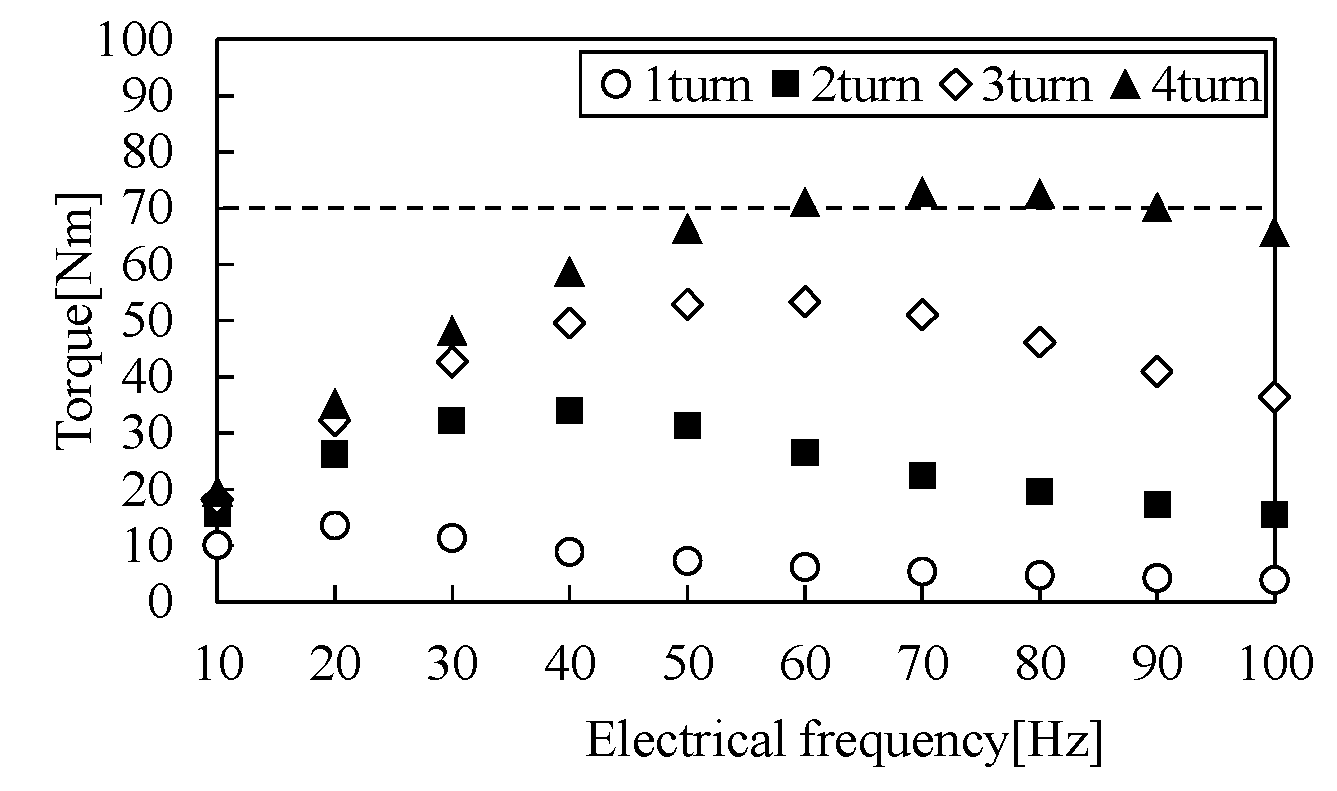
5.3. Torque and Phase Voltage at Required Speed of IM
6. Performance Comparison of Designed Motors
6.1. Motor Volume
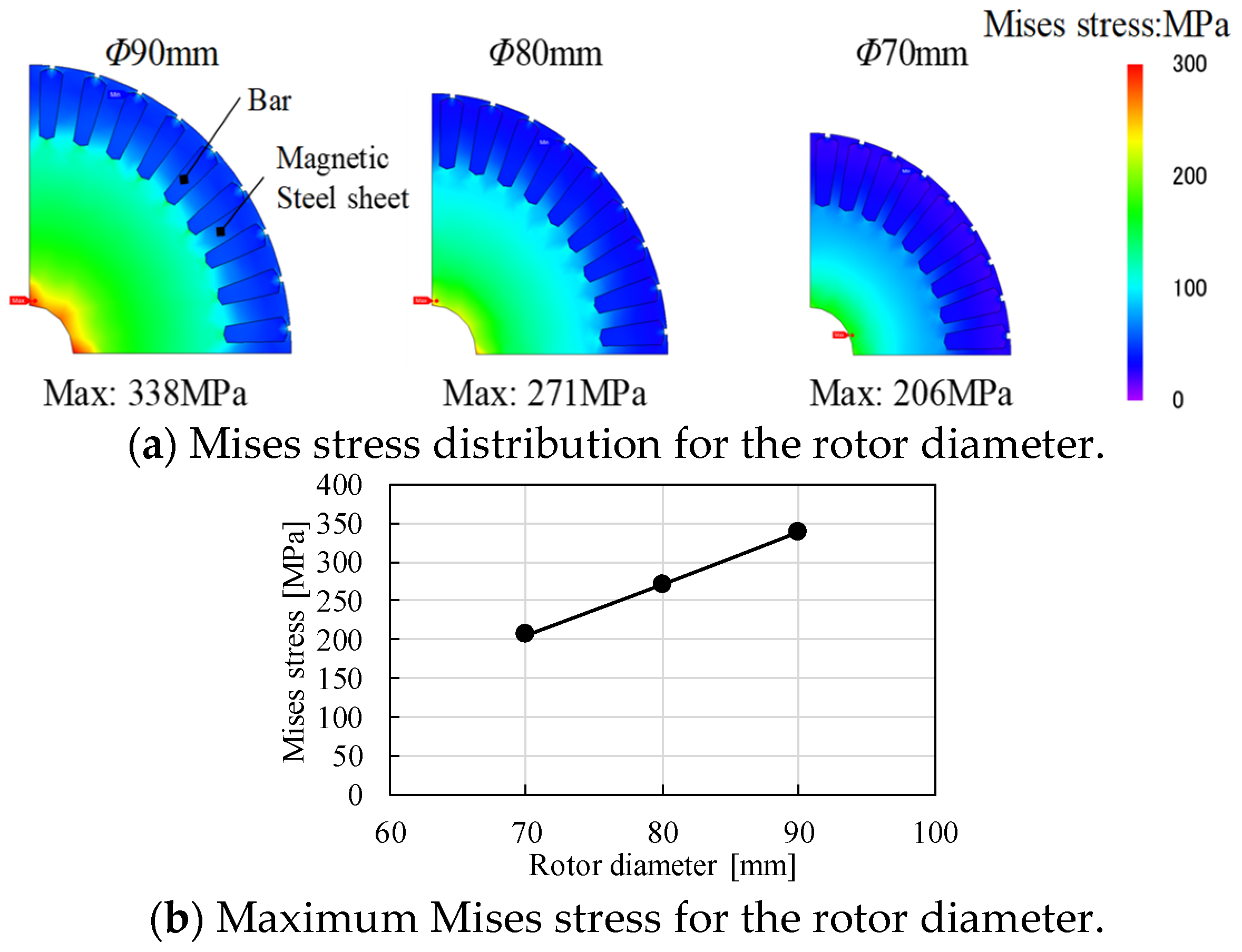
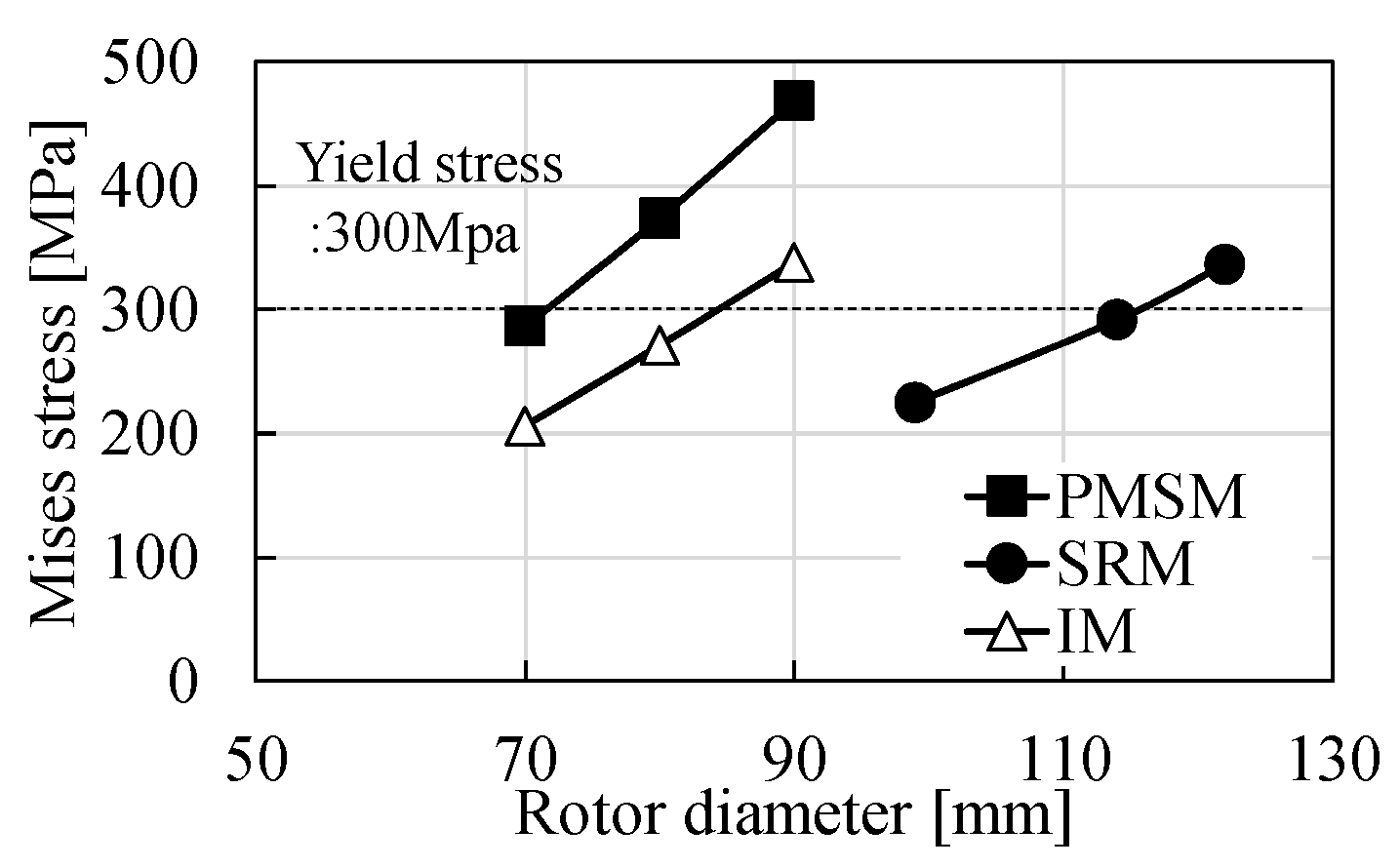
6.2. Mechanical Strength
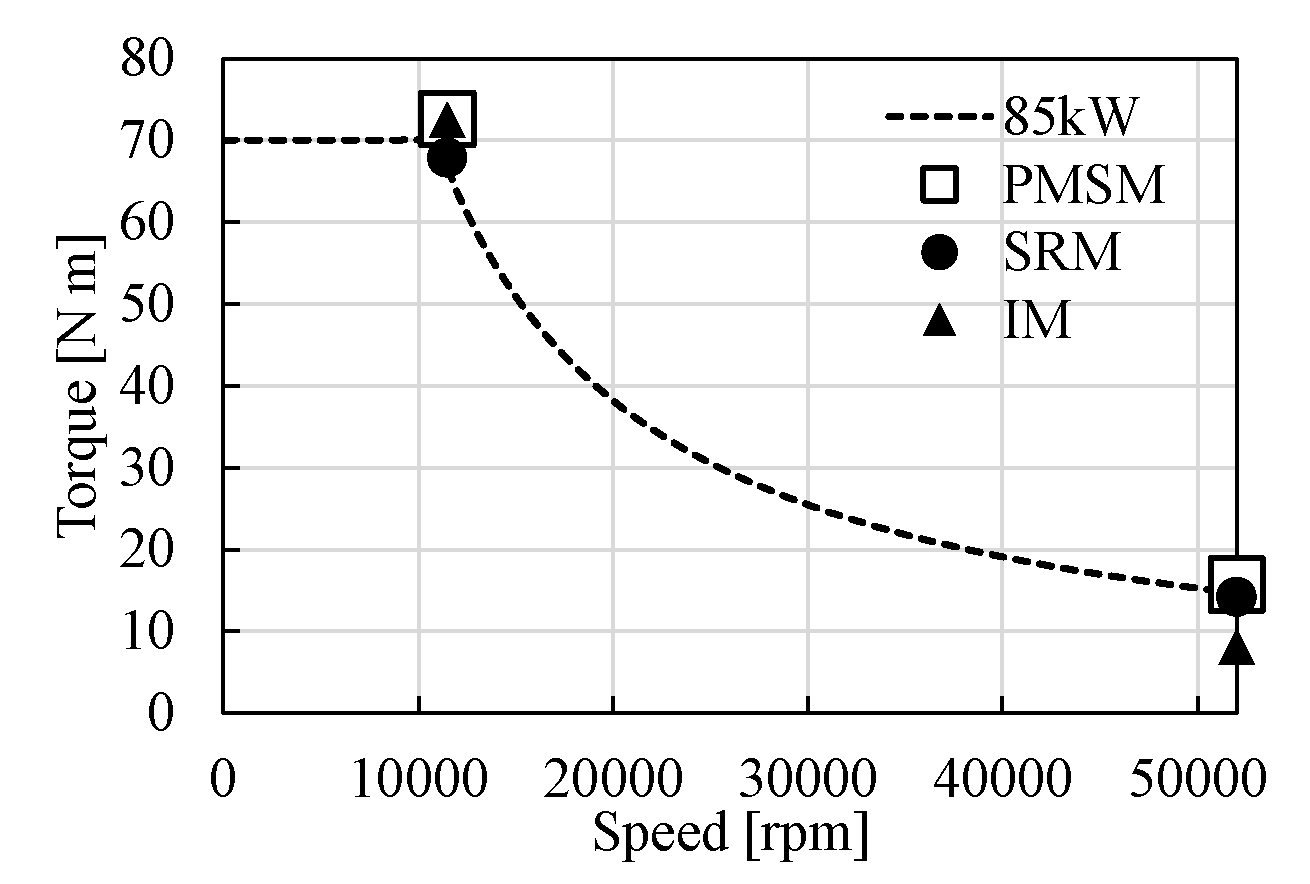
6.3. Output Characteristics
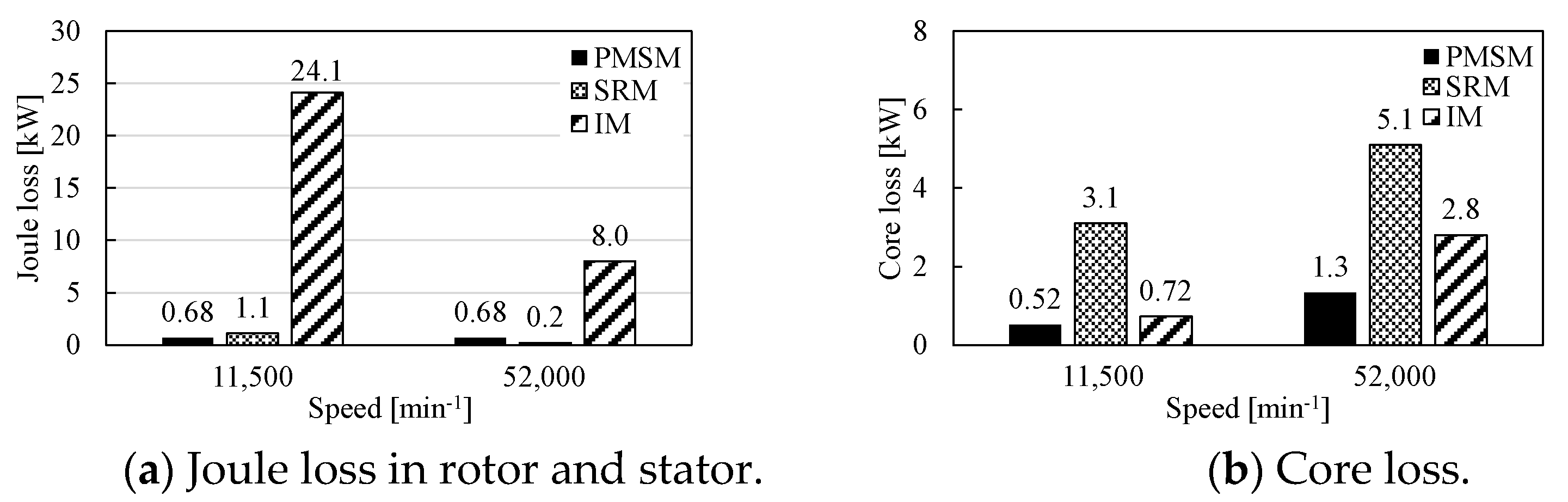
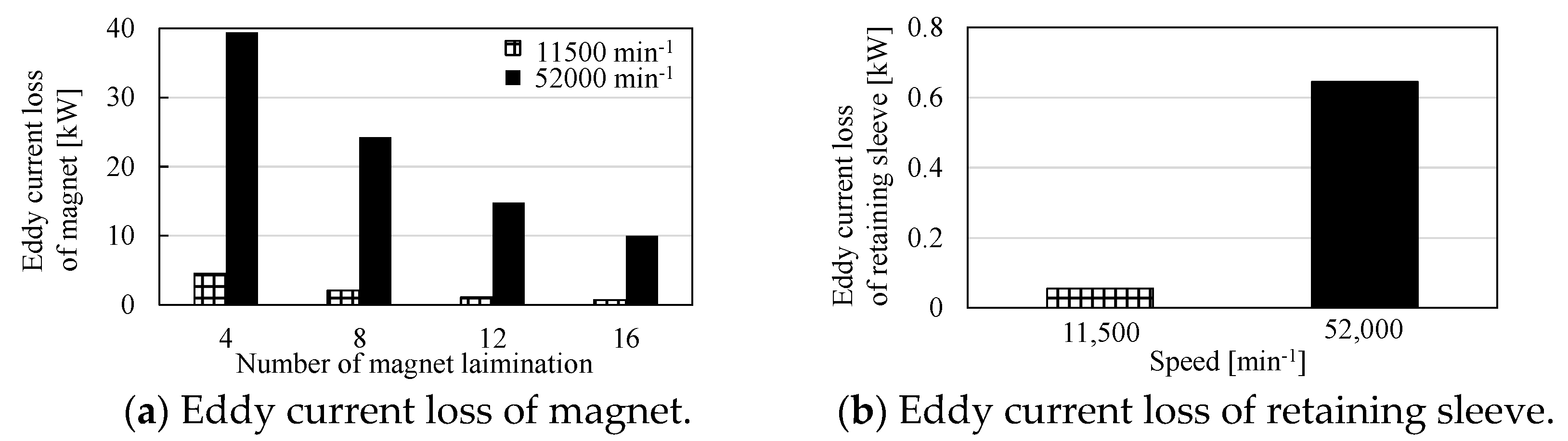
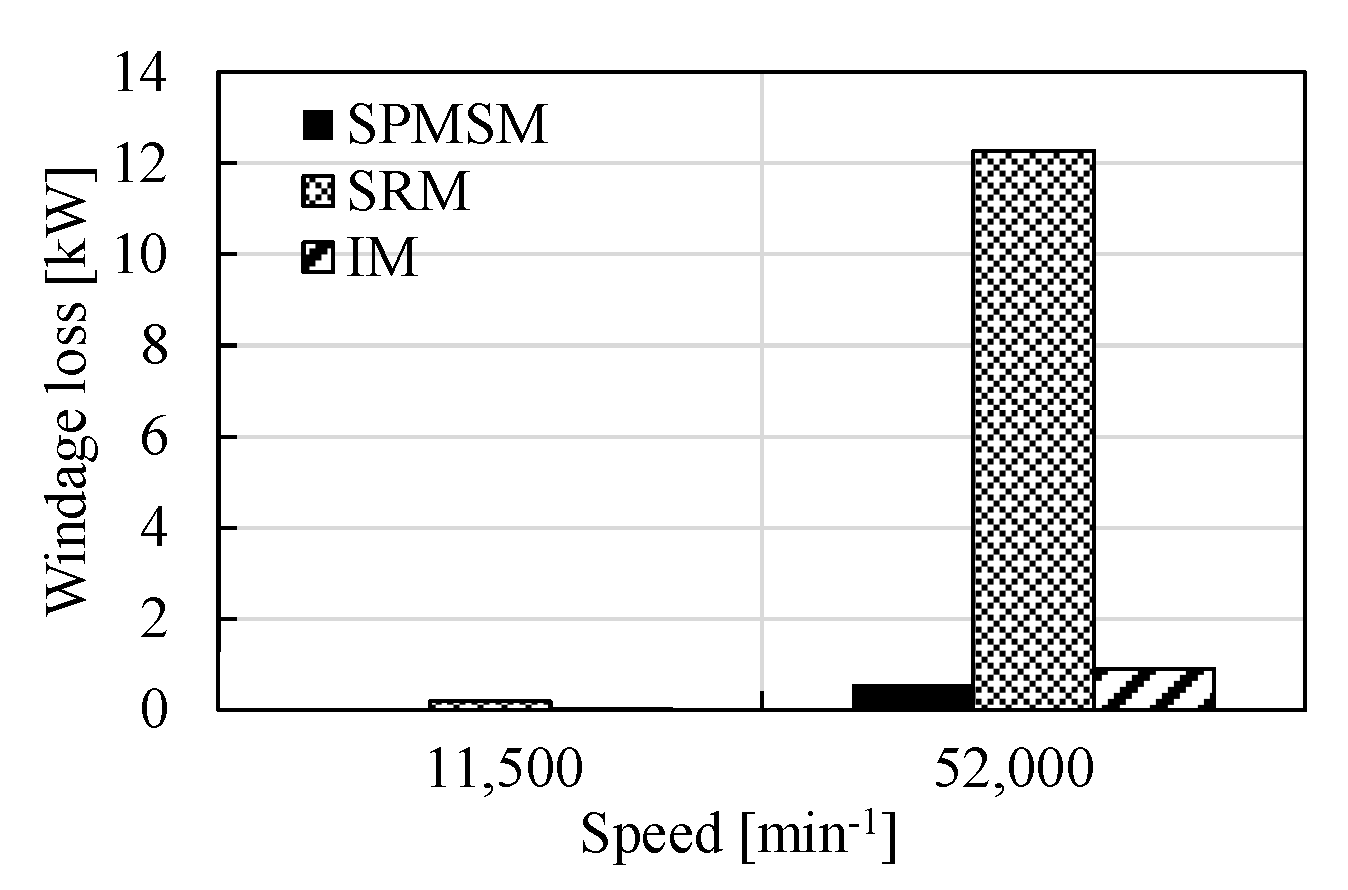
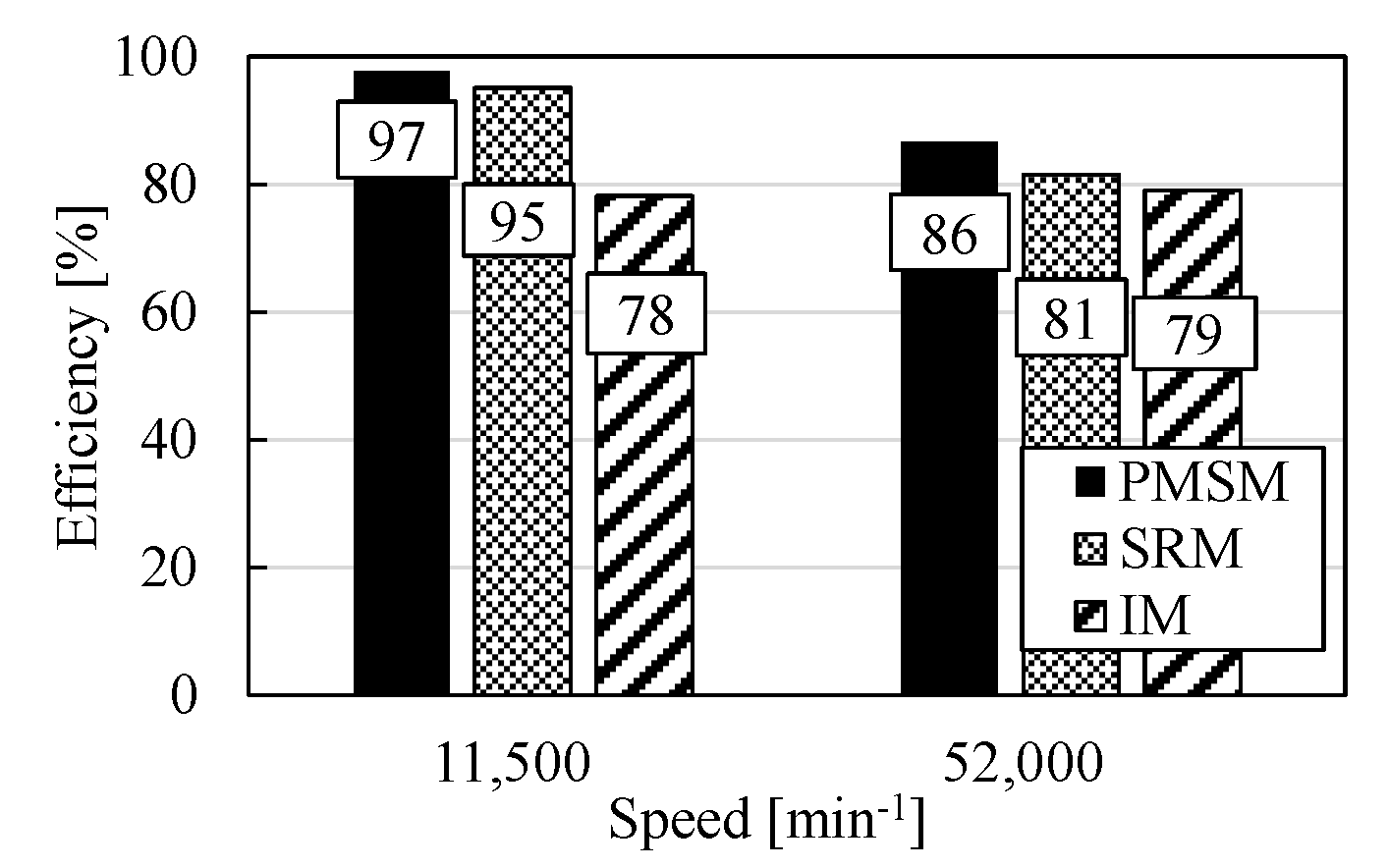
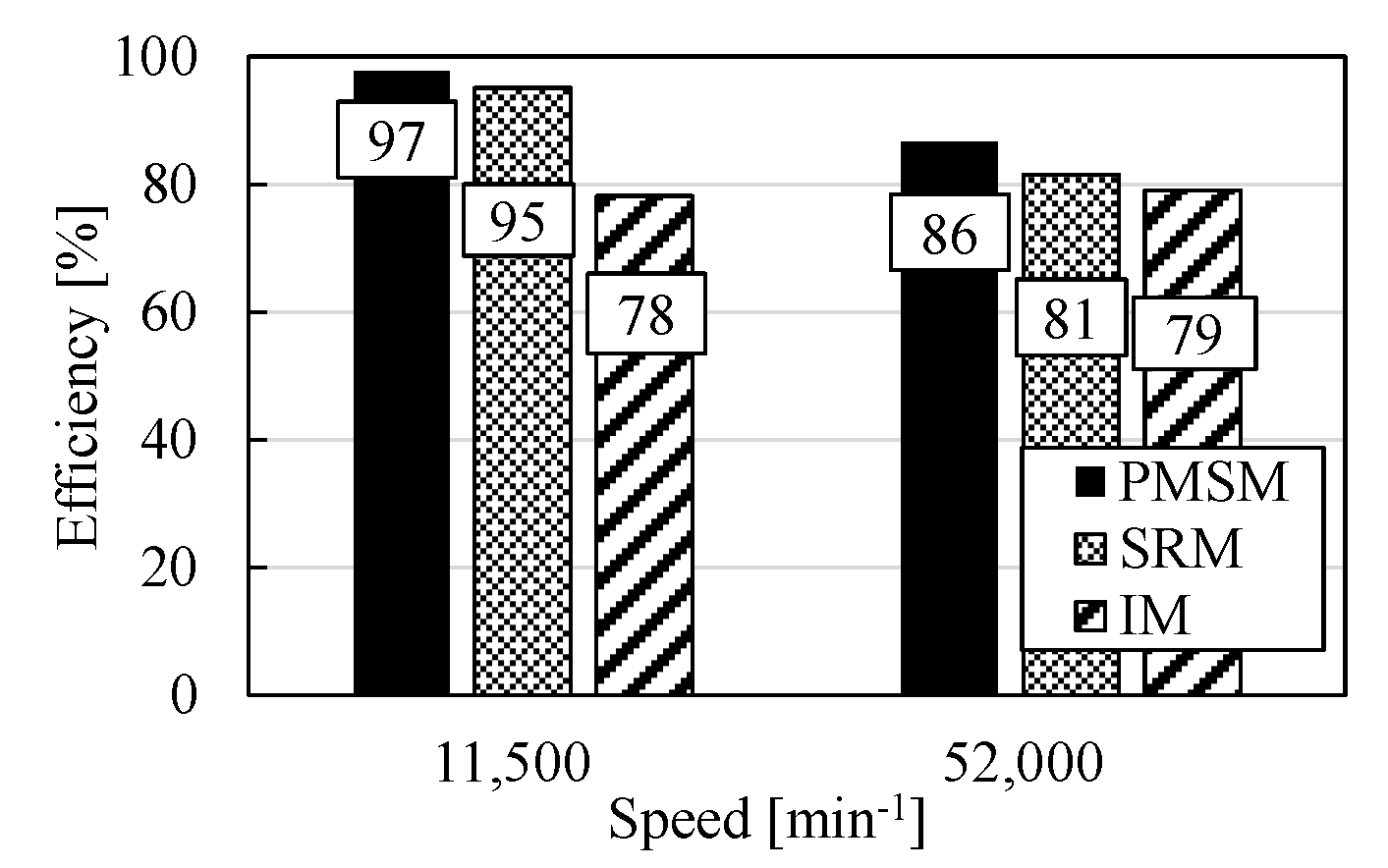
6.4. Loss and Efficiency
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Besharati, M.; Widmer, J.; Atkinson, G.; Pickert, V.; Washington, J. Super-high-speed switched reluctance motor for automotive traction. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 5241–5248. [Google Scholar]
- Chan, C.C.; Chau, K.T.; Jiang, J.Z.; Xia, W.; Zhu, M.; Zhang, R. Novel permanent magnet motor drives for electric vehicles. IEEE Trans. Ind. Electron. 1996, 43, 331–339. [Google Scholar] [CrossRef] [Green Version]
- Chau, K.T.; Chan, C.C.; Liu, C. Overview of Permanent-Magnet Brushless Drives for Electric and Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef] [Green Version]
- Yamazaki, K.; Kumagai, M.; Ikemi, T.; Ohki, S. A Novel Rotor Design of Interior Permanent-Magnet Synchronous Motors to Cope with Both Maximum Torque and Iron-Loss Reduction. IEEE Trans. Ind. Appl. 2013, 49, 2478–2486. [Google Scholar] [CrossRef]
- Zhang, F.; Du, G.; Wang, T.; Liu, G.; Cao, W. Rotor Retaining Sleeve Design for a 1.12-MW High-Speed PM Machine. IEEE Trans. Ind. Appl. 2015, 51, 3675–3685. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.; Li, D.; Qu, R.; Li, J.; Wang, C.; Song, B. Rotor Design and Eddy-Current Loss Suppression for High-Speed Machines With a Solid-PM Rotor. IEEE Trans. Ind. Appl. 2019, 55, 448–457. [Google Scholar] [CrossRef]
- Huang, W.Y.; Bettayeb, A.; Kaczmarek, R.; Vannier, J.C. Optimization of Magnet Segmentation for Reduction of Eddy-Current Losses in Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2010, 25, 381–387. [Google Scholar] [CrossRef]
- Chiba, A.; Kiyota, K.; Hoshi, N.; Takemoto, M.; Ogasawara, S. Development of a Rare-Earth-Free SR Motor With High Torque Density for Hybrid Vehicles. IEEE Trans. Energy Convers. 2015, 30, 175–182. [Google Scholar] [CrossRef]
- Ueta, K.; Akatsu, K. Study of high-speed SRM with amorphous steel sheet for EV. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Popescu, M.; Goss, J.; Staton, D.A.; Hawkins, D.; Chong, Y.C.; Boglietti, A. Electrical Vehicles—Practical Solutions for Power Traction Motor Systems. IEEE Trans. Ind. Appl. 2018, 54, 2751–2762. [Google Scholar] [CrossRef] [Green Version]
- Selvathai, T.; Murthy, A.S.; Vijaykumar, L.; Reginald, R. 100 kW Induction Motor for Hybrid Electric Tracked Vehicle—Design Steps and Challenges. In Proceedings of the 2018 8th IEEE India International Conference on Power Electronics (ICPE), Jaipur, India, 13–15 December 2018. [Google Scholar]
- Riviére, N.; Villani, M.; Popescu, M. Optimisation of a High Speed Copper Rotor Induction Motor for a Traction Application. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019. [Google Scholar]
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. E Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Trans. Transp. Electrif. 2015, 1, 245–254. [Google Scholar] [CrossRef]
- Pellegrino, G.; Vagati, A.; Boazzo, B.; Guglielmi, P. Comparison of Induction and PM Synchronous Motor Drives for EV Application Including Design Examples. IEEE Trans. Ind. Appl. 2012, 48, 2322–2332. [Google Scholar] [CrossRef] [Green Version]
- Vkzncik, J.E. Prediction of Windage Power Loss in Alternators. Nasa Technical Note (NASA TN) D-4849. 1968. Available online: https://ntrs.nasa.gov/citations/19680027690 (accessed on 1 March 2022).
- Tomioka, T.; Akatsu, K. Study of High-speed SRM with Amorphous steel sheet for EV. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2019; pp. 1–6. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Output power [kW] | 85 |
| Maximum torque [N m] | 70 |
| Voltage source [V] | 365 |
| Maximum current [Arms] | 356 |
| Current density [A/mm2] | 15 |
| Maximum diameter [mm] | 200 |
| Stack length of core [mm] | 100 |
| Number of poles | 4 |
| Stator slots | 6 |
| Number of turns [turn/slot] | 7 |
| Resistance of winding [Ω] | 0.0018 |
| Winding type | Concentrated |
| Air gap [mm] | 0.5 |
| Magnet thickness [mm] | 5 |
| Current density [A/mm2] | 10 |
| Material of magnetic steel sheet | 35H230 |
| Material of permanent magnet | NEOMAX-42 |
| Number of magnet segmentations | 16 |
| Number of poles | 8 |
| Stator slots | 12 |
| Number of turns [turn/slot] | 5 |
| Resistance of winding [Ω] | 0.003 |
| Winding type | Concentrated |
| Air gap [mm] | 0.5 |
| Magnet thickness [mm] | 5 |
| Current density [A/mm2] | 12.7 |
| Material of magnetic steel sheet | 35H230 |
| Number of poles | 4 |
| Stator slots | 24 |
| Number of bars | 36 |
| Number of turns [turn/slot] | 4 |
| Resistance of winding [Ω] | 0.003 |
| Winding type | Distributed |
| Air gap [mm] | 0.5 |
| Current density [A/mm2] | 11 |
| Material of magnetic steel sheet | 35H230 |
| Material of bar | Aluminum |
| Secondary resistance [Ω] | 0.071 |
| Primary leak inductance [μH] | 26.2 |
| Secondary leak inductance [μH] | 26.2 |
| Mutual inductance [μH] | 278 |
| PMSM | SRM | IM | |
|---|---|---|---|
| Size [mm] | φ174 × L100 | φ200 × L100 | φ180 × L100 |
| Rotor outer diameter [mm] | 70 | 114 | 80 |
| Motor volume [p.u.] | 0.76 | 1.0 | 0.81 |
| Current density [A/mm2] | 10 | 12.7 | 11 |
| Motor size | Mises Stress at Maximum Speed | Motor Efficiency | |
|---|---|---|---|
| PMSM | Φ174 mm × L100 mm | 287 MPa (Rotor diameter: 70mm) | 11,500 min−1: 97% 52,000 min−1: 86% |
| SRM | Φ200 mm × L100 mm | 291 MPa (Rotor diameter: 114mm) | 11,500 min−1: 95% 52,000 min−1: 81% |
| IM | Φ180 mm × L100 mm | 258 MPa (Rotor diameter: 80mm) | 11,500 min−1: 78% 52,000 min−1: 79% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aiso, K.; Akatsu, K. Performance Comparison of High-Speed Motors for Electric Vehicle. World Electr. Veh. J. 2022, 13, 57. https://doi.org/10.3390/wevj13040057
Aiso K, Akatsu K. Performance Comparison of High-Speed Motors for Electric Vehicle. World Electric Vehicle Journal. 2022; 13(4):57. https://doi.org/10.3390/wevj13040057
Chicago/Turabian StyleAiso, Kohei, and Kan Akatsu. 2022. "Performance Comparison of High-Speed Motors for Electric Vehicle" World Electric Vehicle Journal 13, no. 4: 57. https://doi.org/10.3390/wevj13040057
APA StyleAiso, K., & Akatsu, K. (2022). Performance Comparison of High-Speed Motors for Electric Vehicle. World Electric Vehicle Journal, 13(4), 57. https://doi.org/10.3390/wevj13040057