
Analysis of Electric Moped Scooter Sharing in Berlin: A Technical, Economic and Environmental Perspective



Abstract
:1. Introduction
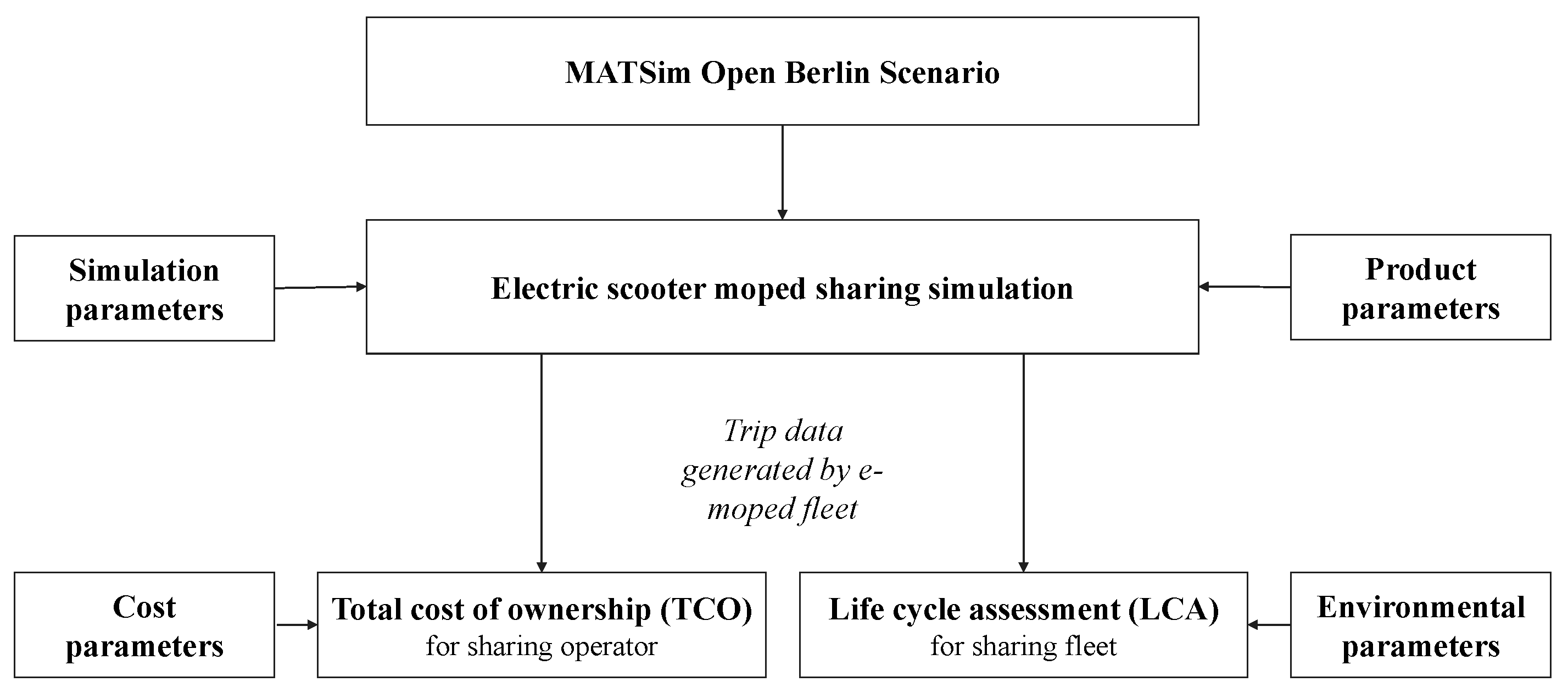
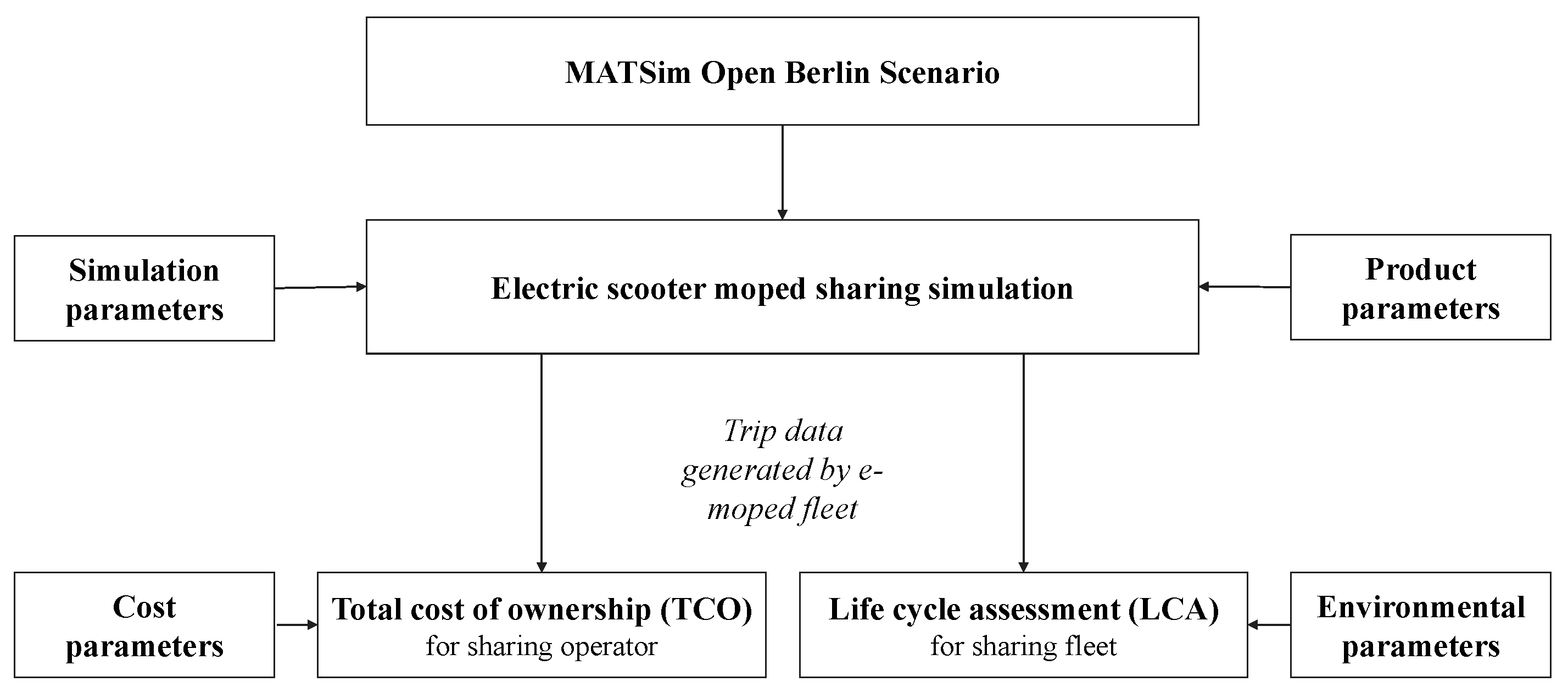
2. Methodology
2.1. Multi-Agent Transport Simulation
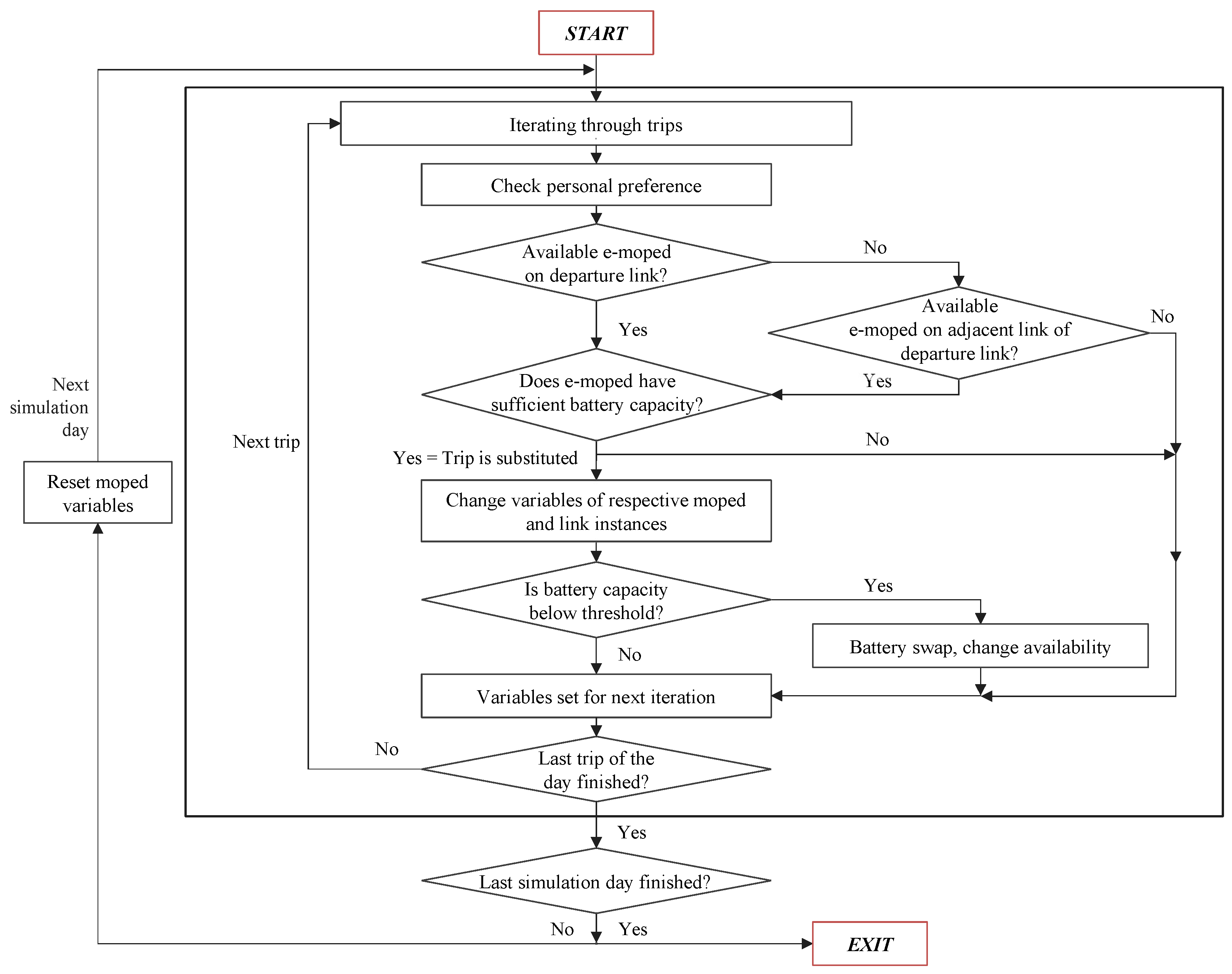
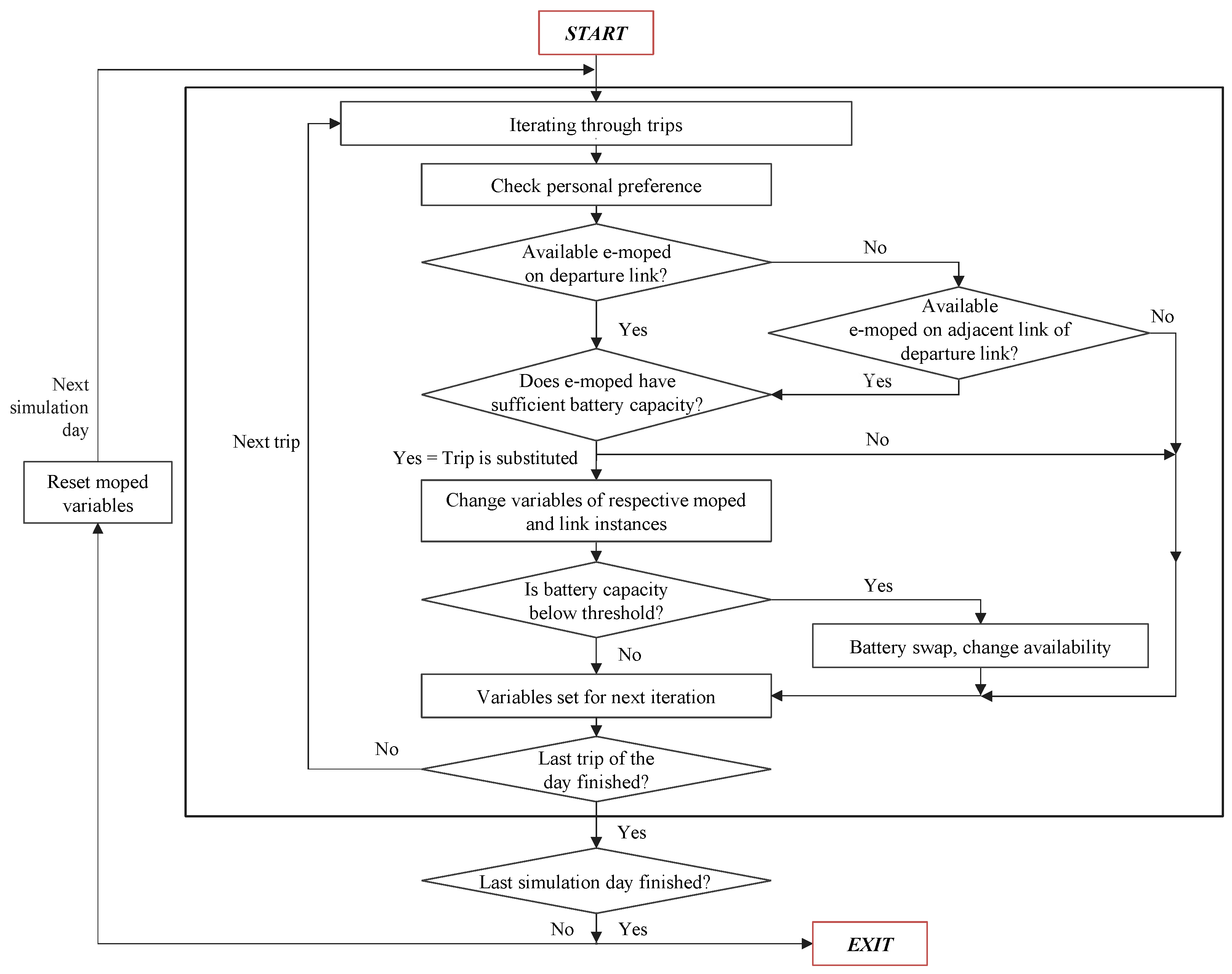
2.2. Sharing Simulation
2.3. Total Cost of Ownership
2.4. Life Cycle Assessment
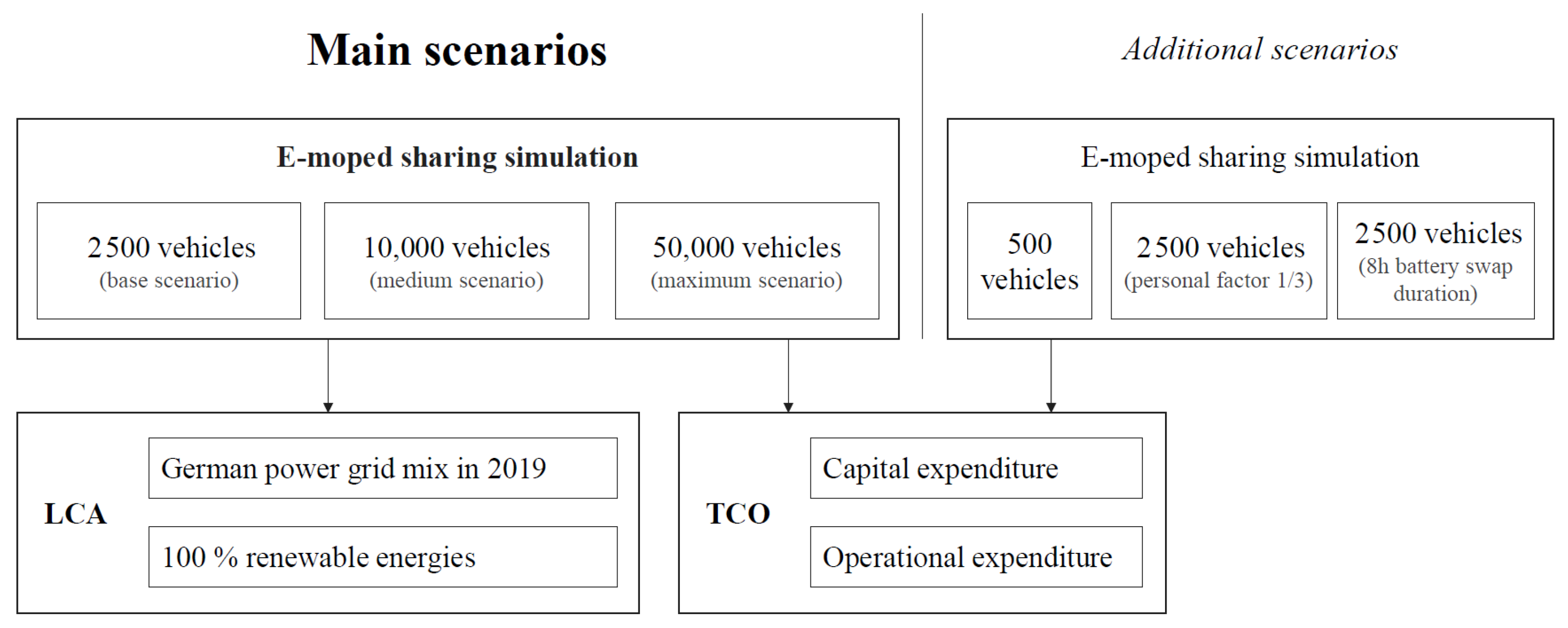
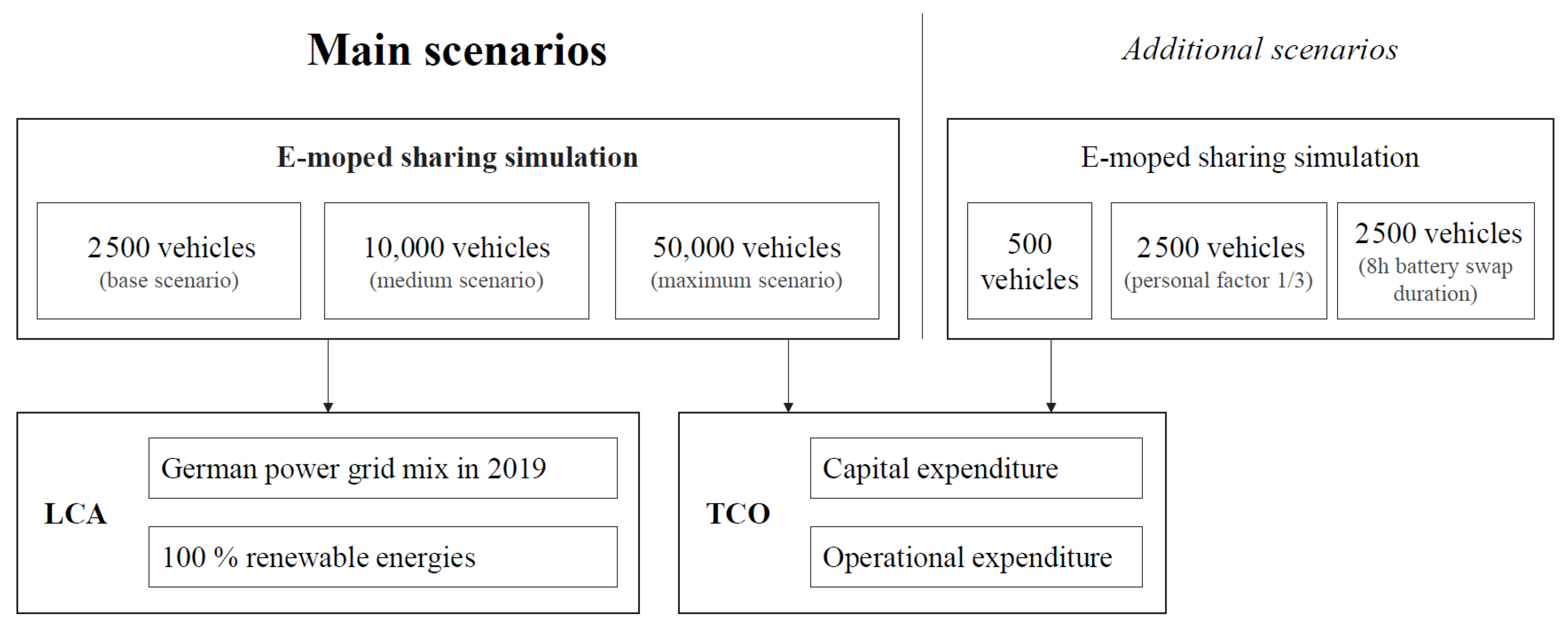
3. Case Study
3.1. Sharing Simulation
3.2. Total Cost of Ownership
3.3. Life Cycle Assessment
4. Results
4.1. Traffic Data
4.1.1. Main Scenarios
4.1.2. Additional Scenarios
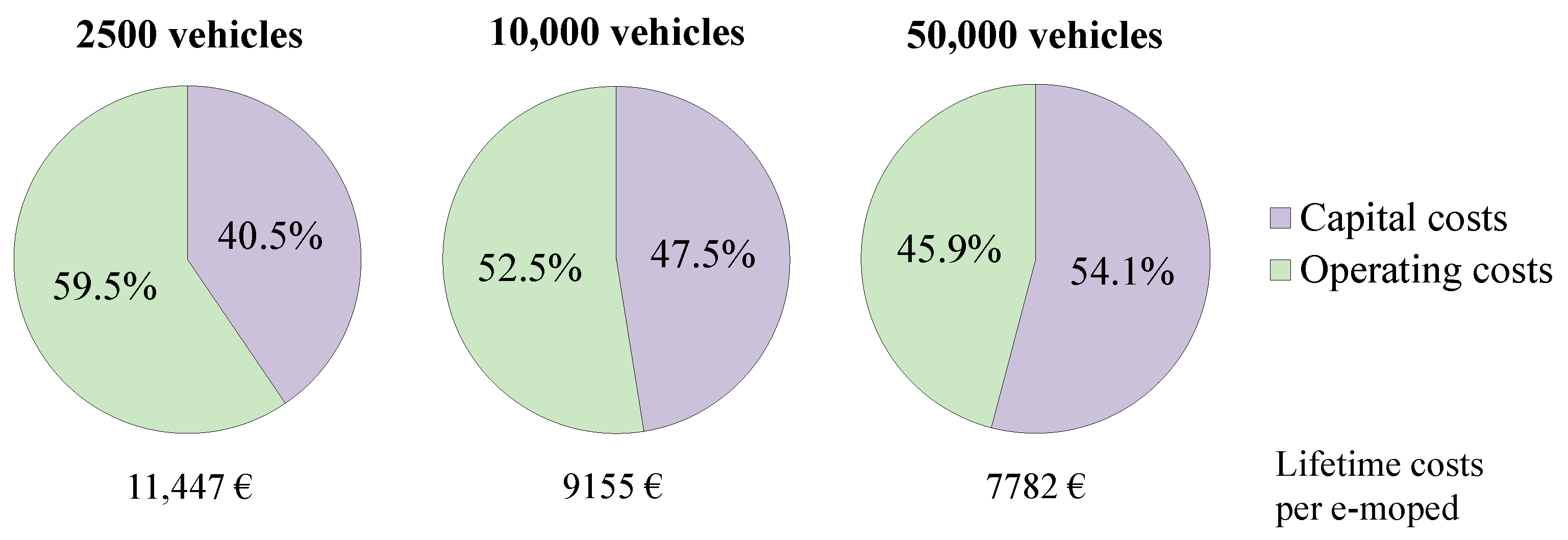
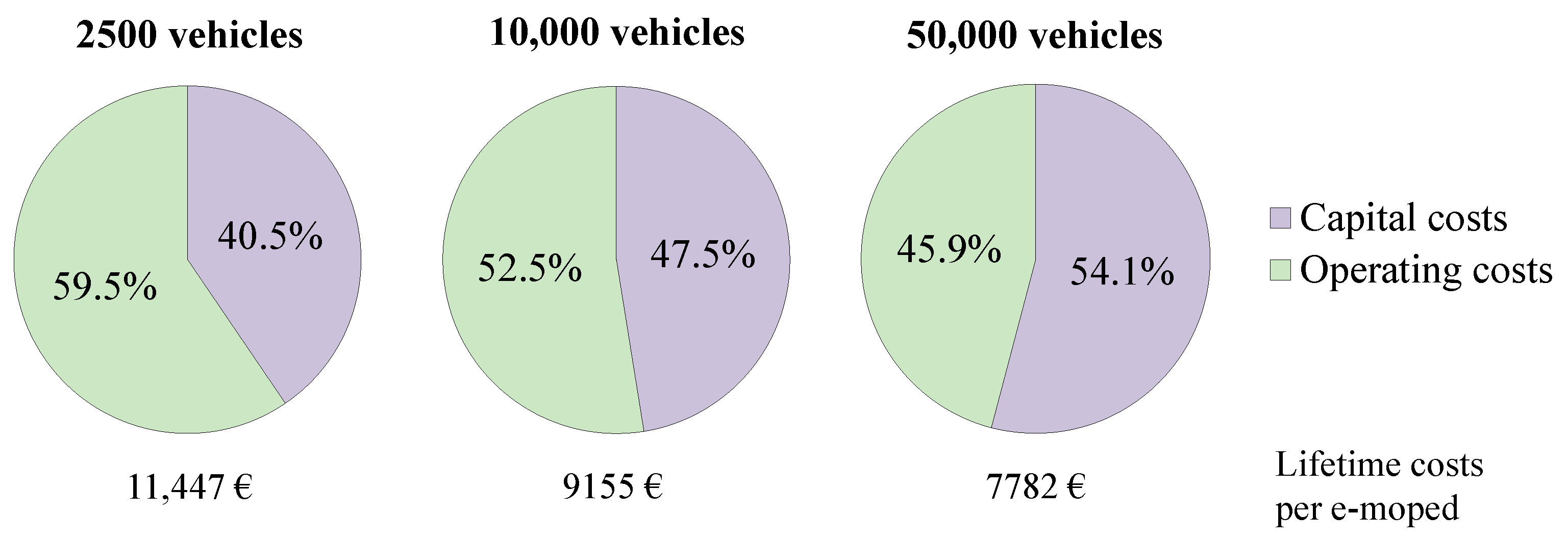
4.2. Total Cost of Ownership
4.2.1. Main Scenarios
4.2.2. Additional Scenarios
4.3. Life Cycle Assessment
5. Discussion
5.1. Traffic Data
5.2. Total Cost of Ownership
5.3. Life Cycle Assessment
6. Conclusions
7. Outlook
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bundesministerium für Umwelt, Naturschutz und nukleare Sicherheit. Klimaschutzplan 2050: Klimaschutzpolitische Grundsätze und Ziele der Bundesregierung. 2016. Available online: https://www.bmu.de/fileadmin/Daten_BMU/Download_PDF/Klimaschutz/klimaschutzplan_2050_bf.pdf (accessed on 14 December 2020).
- Breitkopf, A. Energiebedingte CO2-Emissionen durch den Verkehr in Deutschland in den Jahren 1990 bis 2018. 2019. Available online: https://de.statista.com/statistik/daten/studie/12188/umfrage/co2-emissionen-durch-verkehr-in-deutschland-seit-1990/ (accessed on 14 December 2020).
- Meilă, A.D. Sustainable urban mobility in the sharing economy: Digital platforms, collaborative governance, and innovative transportation. Contemp. Read. Law Soc. Justice 2018, 10, 130–136. [Google Scholar]
- Helms, H.; Kämper, C.; Biemann, K.; Lambrecht, U.; Jöhrens, J.; Meyer, K. Klimabilanz von Elektroautos: Einflussfaktoren und Verbesserungspotenzial. Available online: https://www.agora-verkehrswende.de/fileadmin/Projekte/2018/Klimabilanz_von_Elektroautos/Agora-Verkehrswende_22_Klimabilanz-von-Elektroautos_WEB.pdf (accessed on 14 December 2020).
- Shoup, D.C. The High Cost of Free Parking; Planners Press, American Planning Association: Washington, DC, USA, 2005. [Google Scholar]
- Shaheen, S.; Chan, N. Mobility and the Sharing Economy: Potential to Facilitate the First- and Last-Mile Public Transit Connections. Built Environ. 2016, 42, 573–588. [Google Scholar] [CrossRef]
- Wappelhorst, S.; Sauer, M.; Hinkeldein, D.; Bocherding, A.; Glaß, T. Potential of Electric Carsharing in Urban and Rural Areas. Transp. Res. Procedia 2014, 4, 374–386. [Google Scholar] [CrossRef] [Green Version]
- Namazu, M.; MacKenzie, D.; Zerriffi, H.; Dowlatabadi, H. Is carsharing for everyone? Understanding the diffusion of carsharing services. Transp. Policy 2018, 63, 189–199. [Google Scholar] [CrossRef]
- Howe, E.; Jakobsen, F.J. unu Global Moped Sharing Market Report 2020. Available online: https://share.unumotors.com/global-mobility-sharing-market-reportf (accessed on 15 December 2020).
- Aguilera-García, Á.; Gomez, J.; Sobrino, N. Exploring the adoption of moped scooter-sharing systems in Spanish urban areas. Cities 2020, 96, 102424. [Google Scholar] [CrossRef]
- Nobis, C.; Kuhnimhof, T. Mobilität in Deutschland—MiD: Ergebnisbericht. Available online: http://www.mobilitaet-in-deutschland.de/pdf/MiD2017_Ergebnisbericht.pdf (accessed on 15 December 2020).
- Boglietti, S.; Barabino, B.; Maternini, G. Survey on e-Powered Micro Personal Mobility Vehicles: Exploring Current Issues towards Future Developments. Sustainability 2021, 13, 3692. [Google Scholar] [CrossRef]
- Kafyeke, T. Sharing Is Caring: The Rise of Electric Scooters|Urbanity. 2017. Available online: https://en.reset.org/blog/sharing-caring-rise-electric-scooters-03032017 (accessed on 15 December 2020).
- Stephanou, K. The rise of scooter sharing. In Comodule: IoT Solutions for Bicycles and Scooters; Comodule: Tallinn, Estonia, 2017. [Google Scholar]
- Howe, E. Moped Sharing Regulation Schemes around the World: A Brief Look at the Status quo. 2020. Available online: https://medium.com/unu-share-mobility-insights/moped-sharing-regulation-schemes-around-the-world-a-brief-look-at-the-status-quo-f71c9763faf6 (accessed on 15 December 2020).
- Nefzger, E. Elektrische Motorroller: Das Verkehrsmittel der Stunde. DER SPIEGEL. 2020. Available online: https://www.spiegel.de/auto/elektrische-motorroller-das-verkehrsmittel-der-stunde-a-ad7551a2-84cc-46c6-907f-01f06494c9c0 (accessed on 15 December 2020).
- Howe, E. Global Scootersharing Market Report 2017; UNU: Berlin, Germany, 2017. [Google Scholar]
- Howe, E. Global Scootersharing Market Report 2018; UNU: Berlin, Germany, 2018. [Google Scholar]
- Howe, E.; Jakobsen, F.J. Unu Global Scooter Sharing Market Report 2019; UNU: Berlin, Germany, 2019. [Google Scholar]
- Hofmann, H.; Kaufmann, R.; Tschopp, O.; Widmer, R.; Gauch, M.; Haefeli, U.; Schwegler, U. E-Scooter: Sozial- und naturwissenschaftliche Beiträge zur Förderung leichter Elektrofahrzeuge in der Schweiz: Schlussbericht 2013. Available online: https://www.newride.ch/documents/Forschungsprojekt_E-Scooters_2013/Schlussbericht_E-Scooter_2013.pdf (accessed on 15 December 2020).
- Österreichische Energieagentur—Austrian Energy Agency. E-MOTO—Aktions- und Motivationsplan zur Etablierung der E-Mobilität bei Jungen ZweiradlenkerInnen. Available online: https://www.klimafonds.gv.at/wp-content/uploads/sites/6/B570650-E-Modellregionen-E-Moto-KR15EM8K12961-Endbericht.pdf (accessed on 15 December 2020).
- Degele, J.; Gorr, A.; Haas, K.; Kormann, D.; Krauss, S.; Lipinski, P.; Tenbih, M.; Koppenhoefer, C.; Fauser, J.; Hertweck, D. Identifying E-Scooter Sharing Customer Segments Using Clustering. In Proceedings of the 2018 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Stuttgart, Germany, 17–20 June 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Horni, A.; Nagel, K.; Axhausen, K.W. The Multi-Agent Transport Simulation MATSim; Ubiquity Press: London, UK, 2016. [Google Scholar] [CrossRef]
- Ziemke, D.; Kaddoura, I.; Nagel, K. The MATSim Open Berlin Scenario: A multimodal agent-based transport simulation scenario based on synthetic demand modeling and open data. Procedia Comput. Sci. 2019, 151, 870–877. [Google Scholar] [CrossRef]
- Göhlich, D.; Nagel, K.; Syré, A.M.; Grahle, A.; Martins-Turner, K.; Ewert, R.; Miranda Jahn, R.; Jefferies, D. Integrated Approach for the Assessment of Strategies for the Decarbonization of Urban Traffic. Sustainability 2021, 13, 839. [Google Scholar] [CrossRef]
- Syré, A.M.; Heining, F.; Göhlich, D. Method for a Multi-Vehicle, Simulation-Based Life Cycle Assessment and Application to Berlin’s Motorized Individual Transport. Sustainability 2020, 12, 7302. [Google Scholar] [CrossRef]
- Wernet, G.; Bauer, C.; Steubing, B.; Reinhard, J.; Moreno-Ruiz, E.; Weidema, B. The ecoinvent database version 3 (part I): Overview and methodology. Int. J. Life Cycle Assess. 2016, 21, 1218–1230. [Google Scholar] [CrossRef]
- Ecoinvent Version 3.6. 2019. Available online: https://v36.ecoquery.ecoinvent.org (accessed on 15 December 2020).
- Siret, C.; Tytgat, J.; Ebert, T.; Mistry, M.; Thirlaway, C.; Schutz, B.; Xhantopoulos, D.; Wiaux, J.-P.; Chanson, C.; Tomboy, W.; et al. PEFCR—Product Environmental Footprint Category Rules for High Specific Energy Rechargeable Batteries for Mobile Applications. Available online: https://ec.europa.eu/environment/eussd/smgp/pdf/PEFCR_Batteries.pdf (accessed on 15 December 2020).
- Temporelli, A.; Carvalho, M.L.; Girardi, P. Life Cycle Assessment of Electric Vehicle Batteries: An Overview of Recent Literature. Energies 2020, 13, 2864. [Google Scholar] [CrossRef]
- Huijbregts, M.A.J.; Steinmann, Z.J.N.; Elshout, P.M.F.; Stam, G.; Verones, F.; Vieira, M.; Zijp, M.; Hollander, A.; van Zelm, R. ReCiPe2016: A harmonised life cycle impact assessment method at midpoint and endpoint level. Int. J. Life Cycle Assess. 2017, 22, 138–147. [Google Scholar] [CrossRef]
- Bath, D. Coup in Berlin Stellt Service ein. Berliner Morgenpost. 26 November 2019. Available online: https://www.morgenpost.de/berlin/article227744113/E-Motorroller-Anbieter-Coup-stellt-Service-in-Berlin-ein.html (accessed on 8 December 2020).
- Berliner Senatsverwaltung für Umwelt, Verkehr und Klimaschutz. Masterplan für Nachhaltige und Emissionsarme Mobilität des Landes Berlin. Available online: https://www.bmvi.de/SharedDocs/DE/Anlage/K/Masterplaene-Green-City/berlin.pdf?__blob=publicationFile (accessed on 8 December 2020).
- Berliner Senatsverwaltung für Umwelt, Verkehr und Klimaschutz. Berliner Mobilitätsgesetz: MobG. Available online: http://gesetze.berlin.de/jportal/?quelle=jlink&query=MobG+BE&psml=bsbeprod.psml&max=true&aiz=true (accessed on 8 December 2020).
- Bäumer, M.; Hautzinger, H.; Pfeiffer, M.; Stock, W.; Lenz, B.; Kuhnimhof, T.; Köhler, K. Fahrleistungserhebung 2014—Inlandsfahrleistung und Unfallrisiko; Bundesanstalt für Straßenwesen: Bergisch Gladbach, Germany, 2017. [Google Scholar]
- Aktuelle Stündliche Niederschlagshöhe, Gemessen an Stadtklimastation Berlin-Alexanderplatz (Station ID 399). Available online: https://opendata.dwd.de/climate_environment/CDC/observations_germany/climate_urban/hourly/precipitation/recent/ (accessed on 8 December 2020).
- AfA-Tabelle für die Allgemein Verwendbaren Anlagegüter (AfA-Tabelle “AV”). 2000. Available online: https://www.bundesfinanzministerium.de/Content/DE/Standardartikel/Themen/Steuern/Weitere_Steuerthemen/Betriebspruefung/AfA-Tabellen/Ergaenzende-AfA-Tabellen/AfA-Tabelle_AV.html (accessed on 8 December 2020).
- Grübel, T. Battery Swap Threshold/Shared e-Moped Lifetime. 15 November 2020. [Google Scholar]
- Klaus, T.; Vollmer, C.; Werner, K.; Lehmann, H.; Müschen, K. Energieziel 2050: 100% Strom aus Erneuerbaren Quellen. Available online: https://www.umweltbundesamt.de/sites/default/files/medien/378/publikationen/energieziel_2050.pdf (accessed on 8 December 2020).
- GOVECS AG. GOVECS FLEX Sharing Solution Offer. Available online: https://www.govecsgroup.com/en/ (accessed on 18 December 2020).
- Bundesministerium für Verkehr und digitale Infrastruktur. Straßenverkehrs-Zulassungs-Ordnung: StVZO. Available online: https://www.gesetze-im-internet.de/stvzo_2012/BJNR067910012.html (accessed on 23 December 2020).
- Keil, P.; Jossen, A. Aging of Lithium-Ion Batteries in Electric Vehicles: Impact of Regenerative Braking. World Electr. Veh. J. 2015, 7, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Dearborn, S. Charging Li-ion Batteries for Maximum Run Times: An Understanding of Battery-Charging Fundamentals and System Requirements Enable Designers to Choose a Suitable Linear or Switch-Mode Charging Topology and Optimize Battery Performance in the Application. 2005. Available online: https://www.yumpu.com/en/document/read/19291646/charging-li-ion-batteries-for-maximum-run-times-power-electronics (accessed on 15 December 2020).
- Statista Research Department. Inflationsrate in Deutschland bis 2019. 2020. Available online: https://de.statista.com/statistik/daten/studie/1046/umfrage/inflationsrate-veraenderung-des-verbraucherpreisindexes-zum-vorjahr/#professional (accessed on 27 December 2020).
- Mottschall, M.; Hacker, F. Costs of the energy supply infrastructure for trucks with alternative driving system from a user and macroeconomic perspective in Germany. In Proceedings of the 3rd Electric Road Systems Conference, Frankfurt am Main, Germany, 7–8 May 2019. [Google Scholar]
- Bailly, S. Who Are the Mobility Startups in Europe? European Startup Prize. Available online: https://startupprize.eu/who-are-the-mobility-startups-in-europe/ (accessed on 7 January 2021).
- Bundesverband der Energie- und Wasserwirtschaft e.V. Strompreis für die Industrie. 2019. Available online: https://www.bdew.de/service/daten-und-grafiken/strompreis-fuer-die-industrie/ (accessed on 13 December 2020).
- Clement, J. Average Mobile App User Acquisition Costs Worldwide from September 2018 to August 2019, by User Action and Operating System. Available online: https://www.statista.com/statistics/185736/mobile-app-average-user-acquisition-cost/ (accessed on 9 January 2021).
- Del Duce, A.; Widmer, R.; Gauch, M.; Hans-Jörg, A. Ökoinventare für E-Scooter: Stand des Forschungsprojekts. 2013. Available online: http://www.ikaoe.unibe.ch/forschung/e-scooter/BGF_fes_empa_09042013.pdf (accessed on 15 December 2020).
- Notter, D.A.; Gauch, M.; Widmer, R.; Wäger, P.; Stamp, A.; Zah, R.; Althaus, H.J. Contribution of Li-ion batteries to the environmental impact of electric vehicles. Environ. Sci. Technol. 2010, 44, 6550–6556. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; You, F. Comparative Life-Cycle Assessment of Li-Ion Batteries through Process-Based and Integrated Hybrid Approaches. ACS Sustain. Chem. Eng. 2019, 7, 5082–5094. [Google Scholar] [CrossRef]
- Dai, Q.; Kelly, J.C.; Gaines, L.; Wang, M. Life Cycle Analysis of Lithium-Ion Batteries for Automotive Applications. Batteries 2019, 5, 48. [Google Scholar] [CrossRef] [Green Version]
- Penkała, M.; Ogrodnik, P.; Rogula-Kozłowska, W. Particulate Matter from the Road Surface Abrasion as a Problem of Non-Exhaust Emission Control. Environments 2018, 5, 9. [Google Scholar] [CrossRef] [Green Version]
- Wahid, S.M.S. Automotive brake wear: A review. Environ. Sci. Pollut. Res. 2018, 25, 174–180. [Google Scholar] [CrossRef] [PubMed]
- Grigoratos, T.; Martini, G. Non-Exhaust Traffic Related Emissions—Brake and Tyre Wear PM: Literature Review; EUR, Scientific and Technical Research Series; Publications Office of the European Union: Luxembourg, 2014; Volume 26648. [Google Scholar]
- Agora Energiewende. Die Energiewende im Stromsektor: Stand der Dinge 2019. Rückblick auf die Wesentlichen Entwicklungen sowie Ausblick auf 2020. Available online: https://www.agora-energiewende.de/fileadmin2/Projekte/2019/Jahresauswertung_2019/171_A-EW_Jahresauswertung_2019_WEB.pdf (accessed on 8 December 2020).
- Statistisches Bundesamt. Bruttostromerzeugung in Deutschland. 2019. Available online: https://www.destatis.de/DE/Themen/Branchen-Unternehmen/Energie/Erzeugung/Tabellen/bruttostromerzeugung.html#fussnote-2-103884 (accessed on 8 December 2020).
- Icha, P.; Kuhs, G. Entwicklung der Spezifischen Kohlendioxid-Emissionen des Deutschen Strommix in den Jahren 1990–2018. Available online: https://www.umweltbundesamt.de/publikationen/entwicklung-der-spezifischen-kohlendioxid-5 (accessed on 8 December 2020).
- Martins-Turner, K.; Grahle, A.; Nagel, K.; Göhlich, D. Electrification of Urban Freight Transport—A Case Study of the Food Retailing Industry. Procedia Comput. Sci. 2020, 170, 757–763. [Google Scholar] [CrossRef]
- Maciejewski, M.; Nagel, K. Simulation and Dynamic Optimization of Taxi Services in MATSim. 2013. Available online: https://www.researchgate.net/publication/236630715_Simulation_and_dynamic_optimization_of_taxi_services_in_MATSim (accessed on 15 December 2020).
- INRIX. Innerstädtische Durchschnittsgeschwindigkeit im Autoverkehr in Deutschen Städten 2018. 2019. Available online: https://de.statista.com/statistik/daten/studie/994676/umfrage/innerstaedtische-durchschnittsgeschwindigkeit-im-autoverkehr-in-deutschen-staedten/ (accessed on 22 December 2020).
- Gerike, R.; Hubrich, S.; Ließke, F.; Wittig, S.; Wittwer, R. Tabellen zum Forschungsprojekt Mobilität in Städten—SrV 2018. 2019. Available online: https://changing-cities.org/wp-content/uploads/2020/03/Berlin_Tabellen_Berlin_gesamt.pdf (accessed on 5 November 2020).
- Knoblach, J. Millionen-Investition: Emmy Verdoppelt Seine Berliner E-Roller-Flotte. Available online: https://www.berliner-zeitung.de/wirtschaft-verantwortung/emmy-wird-im-naechsten-fruehjahr-seine-flotte-in-berlin-verdoppeln-li.129158 (accessed on 10 January 2021).
- Bilanz 2019: CO2-Emissionen pro Kilowattstunde Strom Sinken Weiter: Deutschland Verkauft mehr Strom ins Ausland als es Importiert. 2021. Available online: https://www.umweltbundesamt.de/presse/pressemitteilungen/bilanz-2019-co2-emissionen-pro-kilowattstunde-strom (accessed on 12 January 2021).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| Total fleet size over lifetime | 3369 | 13,476 | 67,375 |
| Parameter | Value | Source |
|---|---|---|
| Weekend traffic | 81.94% | Based on [35] |
| Non-rainy hours | 87.08% | Based on [36] |
| Max. walking distance (m) | 500 | Based on [10] |
| Max. link length (m) | 1000 | Derived from [10] |
| Min. Trip distance (km) | 1.5 | Own estimate |
| Max. Trip distance (km) | 30 | Derived from [20] |
| Battery swap threshold | 15% | Own calculation |
| Batter safety buffer | 20% | Own calculation |
| Economic life (years) | 5% | Based on [38] |
| Total passenger car trips in Berlin in 24 h | 2,874,220 | Own calculation based on [24] |
| Scenario car trips in Berlin in 24 h | 1,013,930 | Own calculation based on [24] |
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| Capital cost component | Share of total capital costs | ||
| E-mopeds (incl. telematics) | 71.5% | 76.3% | 78.8% |
| Additional batteries in depot | 14.8% | 15.8% | 16.3% |
| Marketing costs | 5.9% | 2.3% | 0.7% |
| E-vans for battery swapping | 2.7% | 2.3% | 1.7% |
| Driving license verification | 2.4% | 1.0% | 0.3% |
| Charging infrastructure | 0.9% | 1.0% | 1.0% |
| Helmets | 0.7% | 0.8% | 0.8% |
| App development | 0.5% | 0.1% | 0.03% |
| E-cargo bikes for battery swapping | 0.4% | 0.4% | 0.3% |
| Others | 0.2% | 0.2% | 0.1% |
| Lifetime capital costs [€] | 15,612,793 | 58,570,925 | 283,665,414 |
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| Operating cost component | Share of total operating costs | ||
| Personnel | 68.3% | 59.8% | 52.4% |
| Electric consumption (e-mopeds) | 8.0% | 10.7% | 10.5% |
| Maintenance | 7.4% | 10.4% | 14.1% |
| Connectivity fee | 7.3% | 10.3% | 13.9% |
| Office rent | 2.7% | 1.0% | 0.5% |
| E-moped insurance | 2.2% | 3.0% | 4.1% |
| E-moped decay | 2.0% | 2.6% | 2.3% |
| Warehouse rent | 1.3% | 1.6% | 1.7% |
| App infrastructure | 0.5% | 0.2% | 0.04% |
| Electric consumption (e-vans) | 0.4% | 0.4% | 0.3% |
| Others | 0.03% | 0.03% | 0.04% |
| Operating costs in first year (EUR) | 4,757,641 | 13,433,518 | 49,886,878 |
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| Monthly rides/rider | 9 | 22 | 48 |
| Total active users | 158,576 | 233,968 | 349,403 |
| Total user base | 317,152 | 467,935 | 698,806 |
| Input | Unit | Value |
|---|---|---|
| Lithium hydroxide | kg | 2.5 × 10−1 |
| Nickel sulfate | kg | 5.42 × 10−1 |
| Cobalt sulfate | kg | 5.42 × 10−1 |
| Manganese sulfate | kg | 5.23 × 10−1 |
| Sodium hydroxide | kg | 8.36 × 10−1 |
| Source | Share | Source | Share | Source | Share |
|---|---|---|---|---|---|
| Lignite | 17.18% | Nuclear Energy | 11.32% | Others | 4.18% |
| Wind | 18.98% | Photovoltaics | 8.04% | Water | 3.03% |
| Hard Coal | 8.61% | Biogas | 7.54% | Oil | 0.77% |
| Natural Gas | 13.72% | Imports | 6.62% | Geothermal | 0.03% |
| Source | Share | Source | Share | Source | Share |
|---|---|---|---|---|---|
| Wind | 51.06% | Geothermal | 7.09% | Biogas | 3.26% |
| Photovoltaics | 35.18% | Water | 3.40% |
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| E-moped trips, direct link | 13,965 | 53,720 | 221,318 |
| E-moped trips, adjacent link | 41,985 | 151,097 | 449,338 |
| E-moped trips, total | 55,951 | 204,817 | 670,655 |
| Energy consumption (kWh) | 6825 | 25,768 | 93,959 |
| Battery set swaps | 2547 | 9602 | 34,896 |
| Inactive e-mopeds | 45 | 251 | 2492 |
| Share of total e-moped trips of scenario trips | 5.52% | 20.20% | 66.14% |
| Share of total e-moped trips of total trips | 1.95% | 7.13% | 23.33% |
| Average trip distance (km) | 3.59 | 3.7 | 4.12 |
| Average e-moped utilization rate | 22.38 | 20.48 | 13.41 |
| Average mileage per e-moped (km) | 80.29 | 75.79 | 55.27 |
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| Average e-moped utilization rate | 18.48 | 16.91 | 11.08 |
| Mileage per e-moped (km) | 89,846 | 84,732 | 61,826 |
| Electric consumption per e-moped (kWh) | 3053 | 2882 | 2102 |
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| (PF) | (BF) | ||
| E-moped trips, direct link | 2826 | 5424 | 11,311 |
| E-moped trips, adjacent link | 8108 | 19,805 | 33,652 |
| E-moped trips, total | 10,934 | 25,229 | 44,963 |
| Energy consumption (kWh) | 1309 | 3527 | 5370 |
| Battery set swaps | 489 | 1311 | 2005 |
| Inactive e-mopeds | 6 | 139 | 29 |
| Share of total e-moped trips of scenario trips | 1.08% | 2.49% | 4.43% |
| Share of total e-moped trips of total trips | 0.38% | 0.88% | 1.56% |
| Average trip distance (km) | 3.52 | 4.11 | 3.51 |
| Average e-moped utilization rate | 21.87 | 10.09 | 17.99 |
| Average mileage per e-moped (km) | 77.02 | 41.50 | 63.19 |
| Active Fleet | 2500 Vehicles | 10,000 Vehicles | 50,000 Vehicles |
|---|---|---|---|
| (PF) | (BF) | ||
| Average e-moped utilization rate | 18.06 | 8.33 | 14.85 |
| Mileage per e-moped [km] | 85,939 | 46,383 | 70,589 |
| Electric consumption per e-moped [kWh] | 2922 | 1577 | 2400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wortmann, C.; Syré, A.M.; Grahle, A.; Göhlich, D. Analysis of Electric Moped Scooter Sharing in Berlin: A Technical, Economic and Environmental Perspective. World Electr. Veh. J. 2021, 12, 96. https://doi.org/10.3390/wevj12030096
Wortmann C, Syré AM, Grahle A, Göhlich D. Analysis of Electric Moped Scooter Sharing in Berlin: A Technical, Economic and Environmental Perspective. World Electric Vehicle Journal. 2021; 12(3):96. https://doi.org/10.3390/wevj12030096
Chicago/Turabian StyleWortmann, Chris, Anne Magdalene Syré, Alexander Grahle, and Dietmar Göhlich. 2021. "Analysis of Electric Moped Scooter Sharing in Berlin: A Technical, Economic and Environmental Perspective" World Electric Vehicle Journal 12, no. 3: 96. https://doi.org/10.3390/wevj12030096
APA StyleWortmann, C., Syré, A. M., Grahle, A., & Göhlich, D. (2021). Analysis of Electric Moped Scooter Sharing in Berlin: A Technical, Economic and Environmental Perspective. World Electric Vehicle Journal, 12(3), 96. https://doi.org/10.3390/wevj12030096