
Review of Communication Technologies for Electric Vehicle Charging Management and Coordination





Abstract
1. Introduction
2. Vehicular Radio Access Technologies
- Latency: While the end-to-end communication latency requirement for at-home static EV charging is estimated by the US Department of Energy to be around 2 s [26], this value needs to be significantly smaller for dynamic charging, although a specific reference value is not yet defined by the standards. Dynamic wireless EV charging is a time-sensitive, delay-intolerant service given the short lane-crossing duration at typical EV driving speeds [12]. Moreover, vehicular communication networks need to include congestion detection and prevention mechanisms to avoid undesirable delays [37].
- Throughput: Based on the 2010 US Department of Energy report [26,32], the throughput required for home EV charging systems can vary between 10 and 100 kbps. Nevertheless, most of the current vehicular applications are bandwidth-hungry and demand a significantly higher data rate [38]. Since the communication link is expected to carry charging-related messages as well as other information in variable-sized packets, the higher the throughput, the more effective the communication link.
- Reliability: This is a crucial metric for the coordination and management of EV charging services since charging decisions require robust, uninterrupted data exchange with ubiquitous coverage and quality-of-service (QoS) guarantees, i.e., high reliability is required. Reliability is also particularly important for safety-critical applications and is hence an important factor in the selection of effective charge-enabling vehicular communication networks. The reliability of the communication channel is also an important factor in vehicular communications due to the expected channel fading and other impairments during vehicular mobility [39].
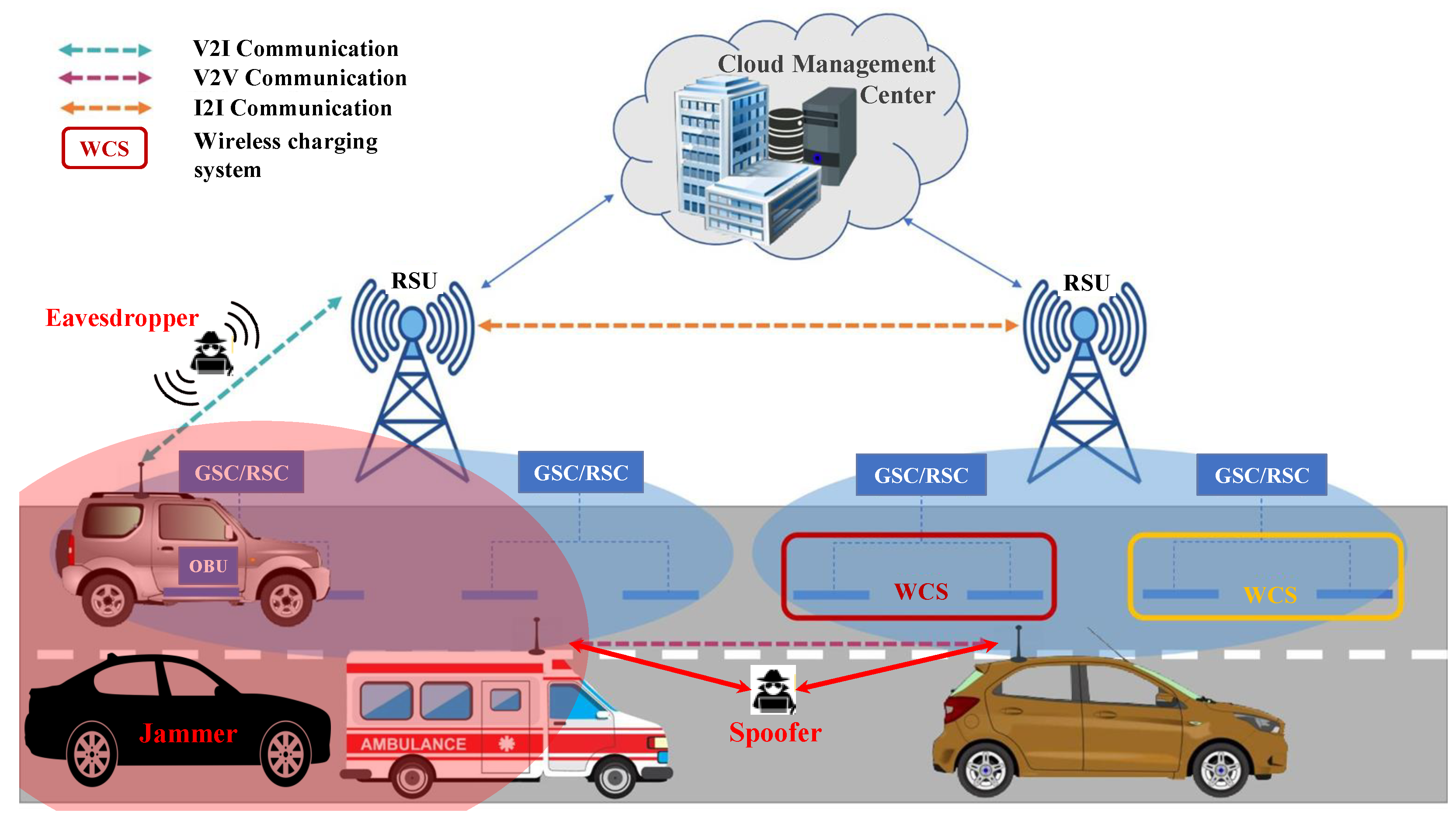
- Security and Privacy: One of the most critical requirements in vehicular communications is the security and privacy of the information shared between the EVs and the other network entities. An end-to-end secure data transfer is essential to provide protection against unauthorized transactions and other potential attacks [40,41,42,43]. In addition, privacy-sensitive data, such as EV location, EV ID, and payment information, must be protected against potential misuse by other network entities [44].
3. Dedicated Short-Range Communication (DSRC)
3.1. IEEE 802.11p DSRC
3.2. IEEE 802.11bd DSRC
3.3. Multiuser Channel Access
4. Cellular Networks
4.1. UMTS and LTE
4.2. Cellular V2X
4.3. 5G NR-V2X
5. 5G Technology Integration
6. Physical Layer Security
7. Communication in EV Charging Coordination
7.1. DSRC in Charging Coordination
7.2. Cellular Technologies in Charging Coordination
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, Y.; Venkatesh, B.; Guan, L. Optimal scheduling for charging and discharging of electric vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105. [Google Scholar] [CrossRef]
- Patil, D.; McDonough, M.K.; Miller, J.M.; Fahimi, B.; Balsara, P.T. Wireless Power Transfer for Vehicular Applications: Overview and Challenges. IEEE Trans. Transp. Electrif. 2018, 4, 3–37. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A Comprehensive Study of Implemented International Standards, Technical Challenges, Impacts and Prospects for Electric Vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Desreveaux, A.; Hittinger, E.; Bouscayrol, A.; Castex, E.; Sirbu, G.M. Techno-Economic Comparison of Total Cost of Ownership of Electric and Diesel Vehicles. IEEE Access 2020, 8, 195752–195762. [Google Scholar] [CrossRef]
- Institution of Engineering and Technology (IET). What Is a Smart Grid? 2013. Available online: https://www.theiet.org/media/1251/smart-grids.pdf (accessed on 1 June 2021).
- Javaid, N.; Hafeez, G.; Iqbal, S.; Alrajeh, N.; Alabed, M.S.; Guizani, M. Energy Efficient Integration of Renewable Energy Sources in the Smart Grid for Demand Side Management. IEEE Access 2018, 6, 77077–77096. [Google Scholar] [CrossRef]
- Mude, K.N.; Dashora, H.K.; Bertoluzzo, M.; Buja, G. From wired to in-moving charging of the electric vehicles. In Proceedings of the WSEAS International Conference on Development, Energy, Environment, Economics (DEEE), Lisbon, Portugal, 30 October–1 November 2014; pp. 33–42. [Google Scholar]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrif. 2018, 4, 38–63. [Google Scholar] [CrossRef]
- Electric Power Research Institute. Interoperability of Public Electric Vehicle Charging Infrastructure. 2019. Available online: https://www.eei.org/issuesandpolicy/electrictransportation/Documents/Final%20Joint%20Interoperability%20Paper.pdf (accessed on 20 June 2021).
- Jang, Y.J. Survey of the operation and system study on wireless charging electric vehicle systems. Transp. Res. Part C Emerg. Technol. 2018, 95, 844–866. [Google Scholar] [CrossRef]
- Panchal, C.; Stegen, S.; Lu, J. Review of static and dynamic wireless electric vehicle charging system. J. Eng. Sci. Technol. 2018, 21, 922–937. [Google Scholar] [CrossRef]
- ElGhanam, E.; Hassan, M.; Osman, A. Design of a High Power, LCC-Compensated, Dynamic, Wireless Electric Vehicle Charging System with Improved Misalignment Tolerance. Energies 2021, 14, 885. [Google Scholar] [CrossRef]
- ElGhanam, E.A.; Hassan, M.S.; Osman, A.H. Deployment Optimization of Dynamic Wireless Electric Vehicle Charging Systems: A Review. In Proceedings of the 2020 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Vancouver, BC, Canada, 9–12 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Mohamed, A.A.; Lashway, C.R.; Mohammed, O. Modeling and feasibility analysis of quasi-dynamic WPT system for EV applications. IEEE Trans. Transp. Electrif. 2017, 3, 343–353. [Google Scholar] [CrossRef]
- Liu, Z.; Song, Z. Robust planning of dynamic wireless charging infrastructure for battery electric buses. Transp. Res. Part C Emerg. Technol. 2017, 83, 77–103. [Google Scholar] [CrossRef]
- Jeong, S.; Jang, Y.J.; Kum, D. Economic Analysis of the Dynamic Charging Electric Vehicle. IEEE Trans. Power Electron. 2015, 30, 6368–6377. [Google Scholar] [CrossRef]
- Jang, Y.J.; Suh, E.S.; Kim, J.W. System Architecture and Mathematical Models of Electric Transit Bus System Utilizing Wireless Power Transfer Technology. IEEE Syst. J. 2016, 10, 495–506. [Google Scholar] [CrossRef]
- Kosmanos, D.; Maglaras, L.A.; Mavrovouniotis, M.; Moschoyiannis, S.; Argyriou, A.; Maglaras, A.; Janicke, H. Route Optimization of Electric Vehicles Based on Dynamic Wireless Charging. IEEE Access 2018, 6, 42551–42565. [Google Scholar] [CrossRef]
- Maglaras, L.; Jiang, J.; Maglaras, A.; Topalis, F.; Moschoyiannis, S. Dynamic wireless charging of electric vehicles on the move with Mobile Energy Disseminators. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 239–251. [Google Scholar] [CrossRef]
- Mou, X.; Zhao, R.; Gladwin, D.T. Vehicle to Vehicle Charging (V2V) Bases on Wireless Power Transfer Technology. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 4862–4867. [Google Scholar]
- Zhang, R.; Zhang, S.; Qian, Z.; Xiao, M.; Wu, J.; Ge, J.; Lu, S. Collaborative Interactive Wireless Charging in a Cyclic Mobispace. In Proceedings of the 2018 IEEE/ACM 26th International Symposium on Quality of Service (IWQoS), Banff, AB, Canada, 4–6 June 2018; pp. 1–10. [Google Scholar]
- Shen, X.; Fantacci, R.; Chen, S. Internet of Vehicles [Scanning the Issue]. Proc. IEEE 2020, 108, 242–245. [Google Scholar] [CrossRef]
- Bayram, I.S.; Papapanagiotou, I. A survey on communication technologies and requirements for internet of electric vehicles. EURASIP J. Wirel. Commun. Netw. 2014, 223, 1–8. [Google Scholar] [CrossRef]
- Gil, A.; Sauras-Perez, P.; Taiber, J. Communication requirements for dynamic wireless power transfer for battery electric vehicles. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014; pp. 1–7. [Google Scholar]
- Smiai, O.; Bellotti, F.; De Gloria, A.; Berta, R.; Amditis, A.; Damousis, Y.; Winder, A. Information and communication technology research opportunities in dynamic charging for electric vehicle. In Proceedings of the 2015 Euromicro Conference on Digital System Design, Madeira, Portugal, 26–28 August 2015; pp. 297–300. [Google Scholar]
- U.S. Department of Energy. Communications Requirements of Smart Grid Technologies. 2010. Available online: https://www.energy.gov/sites/default/files/gcprod/documents/Smart_Grid_Communications_Requirements_Report_10-05-2010.pdf (accessed on 1 June 2021).
- Kuzlu, M.; Pipattanasomporn, M.; Rahman, S. Communication network requirements for major smart grid applications in HAN, NAN and WAN. Comput. Netw. 2014, 67, 74–88. [Google Scholar] [CrossRef]
- Al-Anbagi, I.; Mouftah, H.T. WAVE 4 V2G: Wireless access in vehicular environments for vehicle-to-grid applications. Veh. Commun. 2016, 3, 31–42. [Google Scholar] [CrossRef]
- MacHardy, Z.; Khan, A.; Obana, K.; Iwashina, S. V2X Access Technologies: Regulation, Research, and Remaining Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 1858–1877. [Google Scholar] [CrossRef]
- Rinaldi, S.; Pasetti, M.; Sisinni, E.; Bonafini, F.; Ferrari, P.; Rizzi, M.; Flammini, A. On the mobile communication requirements for the demand-side management of electric vehicles. Energies 2018, 11, 1220. [Google Scholar] [CrossRef]
- Lee, M.; Newman, R.; Latchman, H.; Katar, S.; Yonge, L. HomePlug 1.0 powerline communication LANs—Protocol description and performance results. Int. J. Commun. Syst. 2003, 16, 447–473. [Google Scholar] [CrossRef]
- Su, W.; Eichi, H.; Zeng, W.; Chow, M. A Survey on the Electrification of Transportation in a Smart Grid Environment. IEEE Trans. Ind. Inform. 2012, 8, 1–10. [Google Scholar] [CrossRef]
- Baker, N. ZigBee and Bluetooth strengths and weaknesses for industrial applications. Comput. Control Eng. J. 2005, 16, 20–25. [Google Scholar] [CrossRef]
- Su, W.; Zeng, W.; Chow, M. A digital testbed for a PHEV/PEV enabled parking lot in a Smart Grid environment. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; pp. 1–7. [Google Scholar]
- Conti, M.; Fedeli, D.; Virgulti, M. B4V2G: Bluetooth for electric vehicle to smart grid connection. In Proceedings of the 2011—Ninth International Workshop on Intelligent Solutions in Embedded Systems, Regensburg, Germany, 7–8 July 2011; pp. 13–18. [Google Scholar]
- Cao, Y.; Jiang, T.; Kaiwartya, O.; Sun, H.; Zhou, H.; Wang, R. Toward Pre-Empted EV Charging Recommendation Through V2V-Based Reservation System. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3026–3039. [Google Scholar] [CrossRef]
- Bwalya, K. Protocols and Design Structures for Vehicular Networks. In Connected Vehicles in the Internet of Things: Concepts, Technologies and Frameworks for the IoV; Zaigham, M., Ed.; Springer International Publishing: Cham, Switzerland, 2020; Chapter 5; pp. 101–119. [Google Scholar]
- Singh, P.; Singh, R.; Nandi, S.; Ghafoor, K.; Nandi, S. Seamless V2I Communication in HetNet: State-of-the-Art and Future Research Directions. In Connected Vehicles in the Internet of Things: Concepts, Technologies and Frameworks for the IoV; Zaigham, M., Ed.; Springer International Publishing: Cham, Switzerland, 2020; Chapter 3; pp. 37–83. [Google Scholar]
- He, R.; Molisch, A.F.; Tufvesson, F.; Zhong, Z.; Ai, B.; Zhang, T. Vehicle-to-Vehicle Propagation Models With Large Vehicle Obstructions. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2237–2248. [Google Scholar] [CrossRef]
- La, V.H.; Cavalli, A. Security Attacks and Solutions in Vehicular Ad Hoc Networks: A Survey. Int. J. Adhoc Netw. Syst. 2014, 4, 1–20. [Google Scholar] [CrossRef]
- Vijayakumar, P.; Azees, M.; Kannan, A.; Jegatha Deborah, L. Dual Authentication and Key Management Techniques for Secure Data Transmission in Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1015–1028. [Google Scholar] [CrossRef]
- Furqan, H.M.; Solaija, M.S.J.; Hamamreh, J.M.; Arslan, H. Intelligent Physical Layer Security Approach for V2X Communication. arXiv 2020, arXiv:1905.05075. [Google Scholar]
- Hamamreh, J.M.; Furqan, H.M.; Arslan, H. Classifications and Applications of Physical Layer Security Techniques for Confidentiality: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2019, 21, 1773–1828. [Google Scholar] [CrossRef]
- Han, W.; Xiao, Y. Privacy preservation for V2G networks in smart grid: A survey. Comput. Commun. 2016, 91, 17–28. [Google Scholar] [CrossRef]
- Rezgui, J.; Cherkaoui, S.; Said, D. A two-way communication scheme for vehicles charging control in the smart grid. In Proceedings of the 2012 8th International Wireless Communications and Mobile Computing Conference (IWCMC), Limassol, Cyprus, 27–31 August 2012; pp. 883–888. [Google Scholar]
- Araniti, G.; Campolo, C.; Condoluci, M.; Iera, A.; Molinaro, A. LTE for vehicular networking: A survey. IEEE Commun. Mag. 2013, 51, 148–157. [Google Scholar] [CrossRef]
- Fuentes, M.; Carcel, J.L.; Dietrich, C.; Yu, L.; Garro, E.; Pauli, V.; Lazarakis, F.I.; Grondalen, O.; Bulakci, M.; Yu, J.; et al. 5G New Radio Evaluation Against IMT-2020 Key Performance Indicators. IEEE Access 2020, 8, 110880–110896. [Google Scholar] [CrossRef]
- Belanovic, P.; Valerio, D.; Paier, A.; Zemen, T.; Ricciato, F.; Mecklenbrauker, C.F. On wireless links for vehicle-to-infrastructure communications. IEEE Trans. Veh. Technol. 2009, 59, 269–282. [Google Scholar] [CrossRef]
- Xu, Z.; Li, X.; Zhao, X.; Zhang, M.H.; Wang, Z. DSRC versus 4G-LTE for Connected Vehicle Applications: A Study on Field Experiments of Vehicular Communication Performance. J. Adv. Transp. 2017, 2017, 2750452. [Google Scholar] [CrossRef]
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Mohammad, S.A.; Rasheed, A.; Qayyum, A. VANET architectures and protocol stacks: A survey. In Proceedings of the International Workshop on Communication Technologies for Vehicles, Oberpfaffenhofen, Germany, 23–24 March 2011; pp. 95–105. [Google Scholar]
- Ahmed, S.A.; Ariffin, S.H.; Fisal, N. Overview of wireless access in vehicular environment (WAVE) protocols and standards. Indian J. Sci. Technol. 2013, 6, 4994–5001. [Google Scholar] [CrossRef]
- Hussain, S.S.; Ustun, T.S.; Nsonga, P.; Ali, I. IEEE 1609 WAVE and IEC 61850 standard communication based integrated EV charging management in smart grids. IEEE Trans. Veh. Technol. 2018, 67, 7690–7697. [Google Scholar] [CrossRef]
- Gil, A.; Taiber, J. A literature review in dynamic wireless power transfer for electric vehicles: Technology and infrastructure integration challenges. In Sustainable Automotive Technologies 2013; Springer International Publishing: Cham, Switzerland, 2014; pp. 289–298. [Google Scholar]
- Uzcátegui, R.A.; De Sucre, A.J.; Acosta-Marum, G. Wave: A tutorial. IEEE Commun. Mag. 2009, 47, 126–133. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J. IEEE 802.11bd & 5G NR V2X: Evolution of Radio Access Technologies for V2X Communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar]
- Zeadally, S.; Javed, M.A.; Hamida, E.B. Vehicular Communications for ITS: Standardization and Challenges. IEEE Commun. Stand. Mag. 2020, 4, 11–17. [Google Scholar] [CrossRef]
- Anwar, W.; Franchi, N.; Fettweis, G. Physical Layer Evaluation of V2X Communications Technologies: 5G NR-V2X, LTE-V2X, IEEE 802.11bd, and IEEE 802.11p. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–7. [Google Scholar]
- Sharanappa, P.; Mahabaleshwar, S. Performance analysis of CSMA, MACA and MACAW protocols for VANETs. Int. J. Future Comput. Commun. 2014, 3, 129. [Google Scholar]
- IEEE. IEEE Standard—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; Standard, IEEE Std 802.11-2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Hadded, M.; Muhlethaler, P.; Laouiti, A.; Zagrouba, R.; Saidane, L.A. TDMA-based MAC protocols for vehicular ad hoc networks: A survey, qualitative analysis, and open research issues. IEEE Commun. Surv. Tutor. 2015, 17, 2461–2492. [Google Scholar] [CrossRef]
- Jayaraj, V.; Hemanth, C.; Sangeetha, R. A survey on hybrid MAC protocols for vehicular ad-hoc networks. Veh. Commun. 2016, 6, 29–36. [Google Scholar] [CrossRef]
- Nguyen, V.; Oo, T.Z.; Chuan, P.; Hong, C.S. An efficient time slot acquisition on the hybrid TDMA/CSMA multichannel MAC in VANETs. IEEE Commun. Lett. 2016, 20, 970–973. [Google Scholar] [CrossRef]
- Torabi, N.; Ghahfarokhi, B.S. A bandwidth-efficient and fair CSMA/TDMA based multichannel MAC scheme for V2V communications. Telecommun. Syst. 2017, 64, 367–390. [Google Scholar] [CrossRef]
- ETSI. ETSI Technical Report: Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Definitions; Standard, ETSI TR 102 638 V1.1.1; European Telecommunications Standards Institute (ETSI): Sophia Antipolis, France, 2009. [Google Scholar]
- Sommer, C.; Schmidt, A.; Chen, Y.; German, R.; Koch, W.; Dressler, F. On the feasibility of UMTS-based traffic information systems. Ad Hoc Netw. 2010, 8, 506–517. [Google Scholar] [CrossRef]
- Mangel, T.; Kosch, T.; Hartenstein, H. A comparison of UMTS and LTE for vehicular safety communication at intersections. In Proceedings of the 2010 IEEE Vehicular Networking Conference, Jersey City, NJ, USA, 13–15 December 2010; pp. 293–300. [Google Scholar]
- Abid, H.; Chung, T.C.; Lee, S.; Qaisar, S. Performance analysis of LTE smartphones-based vehicle-to-infrastrcuture communication. In Proceedings of the 2012 9th International Conference on Ubiquitous Intelligence and Computing and 9th International Conference on Autonomic and Trusted Computing, Fukuoka, Japan, 4–7 September 2012; pp. 72–78. [Google Scholar]
- Patra, M.; Thakur, R.; Murthy, C.S.R. Improving delay and energy efficiency of vehicular networks using mobile femto access points. IEEE Trans. Veh. Technol. 2016, 66, 1496–1505. [Google Scholar] [CrossRef]
- Lee, K.; Kim, J.; Park, Y.; Wang, H.; Hong, D. Latency of Cellular-Based V2X: Perspectives on TTI-Proportional Latency and TTI-Independent Latency. IEEE Access 2017, 5, 15800–15809. [Google Scholar] [CrossRef]
- Liu, Z.; Lee, H.; Ali, G.; Pesch, D.; Xiao, P. A Survey on Resource Allocation in Vehicular Networks. arXiv 2019, arXiv:1909.13587. [Google Scholar]
- Wang, M.; Liang, H.; Zhang, R.; Deng, R.; Shen, X. Mobility-aware coordinated charging for electric vehicles in VANET-enhanced smart grid. IEEE J. Sel. Areas Commun. 2014, 32, 1344–1360. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Qualcomm. Cellular-V2X Technology Overview: 80-PE732-63 Rev B. Available online: https://www.qualcomm.com/media/documents/files/c-v2x-technology-overview.pdf (accessed on 8 June 2021).
- Fowler, S.; Häll, C.H.; Yuan, D.; Baravdish, G.; Mellouk, A. Analysis of vehicular wireless channel communication via queueing theory model. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014; pp. 1736–1741. [Google Scholar]
- Vinel, A. 3GPP LTE versus IEEE 802.11 p/WAVE: Which technology is able to support cooperative vehicular safety applications? IEEE Wirel. Commun. Lett. 2012, 1, 125–128. [Google Scholar] [CrossRef]
- Nabil, A.; Kaur, K.; Dietrich, C.; Marojevic, V. Performance analysis of sensing-based semi-persistent scheduling in C-V2X networks. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Gonzalez-Martín, M.; Sepulcre, M.; Molina-Masegosa, R.; Gozalvez, J. Analytical models of the performance of c-v2x mode 4 vehicular communications. IEEE Trans. Veh. Technol. 2018, 68, 1155–1166. [Google Scholar] [CrossRef]
- Guo, C.; Liang, L.; Li, G.Y. Resource allocation for low-latency vehicular communications: An effective capacity perspective. IEEE J. Sel. Areas Commun. 2019, 37, 905–917. [Google Scholar] [CrossRef]
- Guo, C.; Liang, L.; Li, G.Y. Resource allocation for vehicular communications with low latency and high reliability. IEEE Trans. Wirel. Commun. 2019, 18, 3887–3902. [Google Scholar] [CrossRef]
- Mei, J.; Zheng, K.; Zhao, L.; Teng, Y.; Wang, X. A latency and reliability guaranteed resource allocation scheme for LTE V2V communication systems. IEEE Trans. Wirel. Commun. 2018, 17, 3850–3860. [Google Scholar] [CrossRef]
- 3GPP. 3GPP Technical Report: Technical Specification Group Services and System Aspects; Study on Enhancement of 3GPP Support for 5G V2X Services; Standard, 3GPP TR 22.886; 3rd Generation Partnership Project (3GPP): Sophia Antipolis Valbonne, France, 2018. [Google Scholar]
- Zheng, K.; Zheng, Q.; Chatzimisios, P.; Xiang, W.; Zhou, Y. Heterogeneous vehicular networking: A survey on architecture, challenges, and solutions. IEEE Commun. Surv. Tutor. 2015, 17, 2377–2396. [Google Scholar] [CrossRef]
- Zheng, Q.; Zheng, K.; Sun, L.; Leung, V.C. Dynamic performance analysis of uplink transmission in cluster-based heterogeneous vehicular networks. IEEE Trans. Veh. Technol. 2015, 64, 5584–5595. [Google Scholar] [CrossRef]
- Dai, P.; Liu, K.; Wu, X.; Liao, Y.; Lee, V.C.S.; Son, S.H. Bandwidth efficiency and service adaptiveness oriented data dissemination in heterogeneous vehicular networks. IEEE Trans. Veh. Technol. 2018, 67, 6585–6598. [Google Scholar] [CrossRef]
- Ahmed, I.; Ismail, M.; Hassan, M. Video Transmission Using Device-to-Device Communications: A Survey. IEEE Access 2019, 7, 131019–131038. [Google Scholar] [CrossRef]
- Ge, X.; Cheng, H.; Mao, G.; Yang, Y.; Tu, S. Vehicular Communications for 5G Cooperative Small-Cell Networks. IEEE Trans. Veh. Technol. 2016, 65, 7882–7894. [Google Scholar] [CrossRef]
- Busari, S.A.; Huq, K.; Mumtaz, S.; Rodriguez, J. Millimetre-wave massive MIMO for cellular vehicle-to-infrastructure communication. IET Intell. Transp. Syst. 2019, 13, 983–990. [Google Scholar] [CrossRef]
- Chen, N.; Wang, M.; Zhang, N.; Shen, X.S.; Zhao, D. SDN-based framework for the PEV integrated smart grid. IEEE Netw. 2017, 31, 14–21. [Google Scholar] [CrossRef]
- Liu, B.; Jia, D.; Wang, J.; Lu, K.; Wu, L. Cloud-assisted safety message dissemination in VANET–cellular heterogeneous wireless network. IEEE Syst. J. 2015, 11, 128–139. [Google Scholar] [CrossRef]
- Sheng, Z.; Pressas, A.; Ocheri, V.; Ali, F.; Rudd, R.; Nekovee, M. Intelligent 5G vehicular networks: An integration of DSRC and mmWave communications. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 17–19 October 2018; pp. 571–576. [Google Scholar]
- Wang, M.; Ismail, M.; Zhang, R.; Shen, X.; Serpedin, E.; Qaraqe, K. Spatio-Temporal Coordinated V2V Energy Swapping Strategy for Mobile PEVs. IEEE Trans. Smart Grid 2018, 9, 1566–1579. [Google Scholar] [CrossRef]
- Bi, S.; Chen, C.; Du, R.; Guan, X. Proper handover between VANET and cellular network improves Internet access. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014; pp. 1–5. [Google Scholar]
- Eiza, M.H.; Ni, Q.; Shi, Q. Secure and privacy-aware cloud-assisted video reporting service in 5G-enabled vehicular networks. IEEE Trans. Veh. Technol. 2016, 65, 7868–7881. [Google Scholar] [CrossRef]
- Dong, P.; Zheng, T.; Yu, S.; Zhang, H.; Yan, X. Enhancing vehicular communication using 5G-enabled smart collaborative networking. IEEE Wirel. Commun. 2017, 24, 72–79. [Google Scholar] [CrossRef]
- Liang, L.; Peng, H.; Li, G.Y.; Shen, X. Vehicular Communications: A Physical Layer Perspective. IEEE Trans. Veh. Technol. 2017, 66, 10647–10659. [Google Scholar] [CrossRef]
- Yang, Y.; Hua, K. Emerging technologies for 5G-enabled vehicular networks. IEEE Access 2019, 7, 181117–181141. [Google Scholar] [CrossRef]
- Correia, S.; Boukerche, A.; Meneguette, R.I. An architecture for hierarchical software-defined vehicular networks. IEEE Commun. Mag. 2017, 55, 80–86. [Google Scholar] [CrossRef]
- Jameel, F.; Chang, Z.; Huang, J.; Ristaniemi, T. Internet of Autonomous Vehicles: Architecture, Features, and Socio-Technological Challenges. IEEE Wirel. Commun. 2019, 26, 21–29. [Google Scholar] [CrossRef]
- Li, Q.C.; Niu, H.; Papathanassiou, A.T.; Wu, G. 5G Network Capacity: Key Elements and Technologies. IEEE Veh. Technol. Mag. 2014, 9, 71–78. [Google Scholar] [CrossRef]
- Liu, G.; Wang, Z.; Hu, J.; Ding, Z.; Fan, P. Cooperative NOMA Broadcasting/Multicasting for Low-Latency and High-Reliability 5G Cellular V2X Communications. IEEE Internet Things J. 2019, 6, 7828–7838. [Google Scholar] [CrossRef]
- Kim, J.B.; Lee, I.H. Capacity Analysis of Cooperative Relaying Systems Using Non-Orthogonal Multiple Access. IEEE Commun. Lett. 2015, 19, 1949–1952. [Google Scholar] [CrossRef]
- Dahi, N.; Hamdi, N. Relaying in Non-Orthogonal Multiple Access Systems with Simultaneous Wireless Information and Power Transfer. In Proceedings of the 2018 14th International Wireless Communications Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 164–168. [Google Scholar] [CrossRef]
- Khan, A.G.; Basharat, S.; Riaz, M.U. Analysis of asymmetric cryptography in information security based on computational study to ensure confidentiality during information exchange. Int. J. Sci. Eng. Res. 2018, 992–999. [Google Scholar] [CrossRef]
- Zhao, X.; Lin, J.; Li, H. Privacy-preserving billing scheme against free-riders for wireless charging electric vehicles. Mob. Inf. Syst. 2017, 2017, 1325698. [Google Scholar] [CrossRef]
- Bokhari, M.U.; Shallal, Q.M. A review on symmetric key encryption techniques in cryptography. Int. J. Comput. Appl. 2016, 147, 43–48. [Google Scholar]
- ElHalawany, B.M.; El-Banna, A.A.A.; Wu, K. Physical-Layer Security and Privacy for Vehicle-to-Everything. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef]
- Martin-Vega, F.J.; Aguayo-Torres, M.C.; Gomez, G.; Entrambasaguas, J.T.; Duong, T.Q. Key Technologies, Modeling Approaches, and Challenges for Millimeter-Wave Vehicular Communications. IEEE Commun. Mag. 2018, 56, 28–35. [Google Scholar] [CrossRef]
- Wang, X.; Hao, P.; Hanzo, L. Physical-layer authentication for wireless security enhancement: Current challenges and future developments. IEEE Commun. Mag. 2016, 54, 152–158. [Google Scholar] [CrossRef]
- Kosmanos, D.; Prodromou, N.; Argyriou, A.; Maglaras, L.A.; Janicke, H. MIMO Techniques for Jamming Threat Suppression in Vehicular Networks. Mob. Inf. Syst. 2016, 2016, 8141204. [Google Scholar] [CrossRef]
- Yan, Q.; Zeng, H.; Jiang, T.; Li, M.; Lou, W.; Hou, Y.T. Jamming Resilient Communication Using MIMO Interference Cancellation. IEEE Trans. Inf. Forensics Secur. 2016, 11, 1486–1499. [Google Scholar] [CrossRef]
- Li, W.; Ghogho, M.; Chen, B.; Xiong, C. Secure Communication via Sending Artificial Noise by the Receiver: Outage Secrecy Capacity/Region Analysis. IEEE Commun. Lett. 2012, 16, 1628–1631. [Google Scholar] [CrossRef]
- Zhao, N.; Yu, F.R.; Li, M.; Yan, Q.; Leung, V.C.M. Physical layer security issues in interference- alignment-based wireless networks. IEEE Commun. Mag. 2016, 54, 162–168. [Google Scholar] [CrossRef]
- Cao, Y.; Ahmad, N.; Kaiwartya, O.; Puturs, G.; Khalid, M. Intelligent transportation systems enabled ICT framework for electric vehicle charging in smart city. In Handbook of Smart Cities; Springer International Publishing: Cham, Switzerland, 2018; pp. 311–330. [Google Scholar]
- Dagdougui, H.; Ouammi, A.; Dessaint, L.A. Peak Load Reduction in a Smart Building Integrating Microgrid and V2B-Based Demand Response Scheme. IEEE Syst. J. 2019, 13, 3274–3282. [Google Scholar] [CrossRef]
- Zhang, J.; Pei, Y.; Shen, J.; Wang, L.; Ding, T.; Wang, S. Charging Strategy Unifying Spatial-Temporal Coordination of Electric Vehicles. IEEE Access 2020, 8, 74853–74863. [Google Scholar] [CrossRef]
- Ding, D.; Li, J.; Tu, P.; Wang, H.; Cao, T.; Zhang, F. Electric Vehicle Charging Warning and Path Planning Method Based on Spark. IEEE Access 2020, 8, 8543–8553. [Google Scholar] [CrossRef]
- Mukherjee, J.C.; Gupta, A. Distributed charge scheduling of plug-in electric vehicles using inter-aggregator collaboration. IEEE Trans. Smart Grid 2016, 8, 331–341. [Google Scholar] [CrossRef]
- Saldana, G.; San Martin, J.I.; Zamora, I.; Asensio, F.J.; Onederra, O. Electric Vehicle into the Grid: Charging Methodologies Aimed at Providing Ancillary Services Considering Battery Degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef]
- Liu, X.; Gao, B.; Wu, C.; Tang, Y. Demand-Side Management With Household Plug-In Electric Vehicles: A Bayesian Game-Theoretic Approach. IEEE Syst. J. 2018, 12, 2894–2904. [Google Scholar] [CrossRef]
- Luo, X.; Chan, K. Real-time scheduling of electric vehicles charging in low-voltage residential distribution systems to minimise power losses and improve voltage profile. Gener. Transm. Distrib. IET 2014, 8, 516–529. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Z.; Xu, Q.; Yang, T.; Zhang, N. A Novel Charging Scheme for Electric Vehicles With Smart Communities in Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 8487–8501. [Google Scholar] [CrossRef]
- Liu, M.; Phanivong, P.K.; Callaway, D.S. Electric vehicle charging control in residential distribution network: A decentralized event-driven realization. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 214–219. [Google Scholar] [CrossRef]
- Li, M.; Wu, X.; Zhang, Z.; Yu, G.; Wang, Y.; Ma, W. A Wireless Charging Facilities Deployment Problem Considering Optimal Traffic Delay and Energy Consumption on Signalized Arterial. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4427–4438. [Google Scholar] [CrossRef]
- Li, C.; Ding, T.; Liu, X.; Huang, C. An Electric Vehicle Routing Optimization Model With Hybrid Plug-In and Wireless Charging Systems. IEEE Access 2018, 6, 27569–27578. [Google Scholar] [CrossRef]
- Santini, S.; Salvi, A.; Valente, A.S.; Pescape, A.; Segata, M.; Lo Cigno, R. A Consensus-Based Approach for Platooning with Intervehicular Communications and Its Validation in Realistic Scenarios. IEEE Trans. Veh. Technol. 2017, 66, 1985–1999. [Google Scholar] [CrossRef]
- Li, G.; Sun, Q.; Boukhatem, L.; Wu, J.; Yang, J. Intelligent Vehicle-to-Vehicle Charging Navigation for Mobile Electric Vehicles via VANET-Based Communication. IEEE Access 2019, 7, 170888–170906. [Google Scholar] [CrossRef]
- Bautista, P.B.; Cárdenas, L.L.; Aguiar, L.U.; Igartua, M.A. A traffic-aware electric vehicle charging management system for smart cities. Veh. Commun. 2019, 20, 100188. [Google Scholar]
- Li, G.; Boukhatem, L.; Zhao, L.; Wu, J. Direct Vehicle-to-Vehicle Charging Strategy in Vehicular Ad-Hoc Networks. In Proceedings of the 2018 9th IFIP International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 26–28 February 2018; pp. 1–5. [Google Scholar]
- Theodoropoulos, T.V.; Damousis, I.G.; Amditis, A.J. Demand-side management ICT for dynamic wireless EV charging. IEEE Trans. Ind. Electron. 2016, 63, 6623–6630. [Google Scholar] [CrossRef]
- Theodoropoulos, T.V.; Damousis, I.G.; Portouli, E.; Amditis, A.J.; El Sayed, N.; Laporte, S. Analysis of AIMD-based DSM for EV wireless charging on the move. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; pp. 1–8. [Google Scholar]
- Ko, K.; Sung, D.K. The effect of cellular network-based communication delays in an EV aggregator’s domain on frequency regulation service. IEEE Trans. Smart Grid 2017, 10, 65–73. [Google Scholar] [CrossRef]
- Ismail, M.; Bayram, I.; Qaraqe, K.; Serpendin, E. 5G-Enhanced Smart Grid Services. In Enabling 5G Communication Systems to Support Vertical Industries; Imran, M., Sambo, Y., Abbasi, Q., Eds.; Wiley-IEEE Press: Piscataway, NJ, USA, 2019; pp. 75–102. [Google Scholar]
- Li, Z.; Fodor, G. (Eds.) Deliverable D3.1: Intermediate 5G V2X Radio; Fifth Generation Communication Automotive Research and Innovation (5GPP): Valencia, Spain, 2018. [Google Scholar]
- Fallgren, M.; Abbas, T.; Allio, S.; Alonso-Zarate, J.; Fodor, G.; Gallo, L.; Kousaridas, A.; Li, Y.; Li, Z.; Li, Z.; et al. Multicast and Broadcast Enablers for High-Performing Cellular V2X Systems. IEEE Trans. Broadcast. 2019, 65, 454–463. [Google Scholar] [CrossRef]
- Kong, C.; Devetsikiotis, M. Optimal charging framework for electric vehicles on the wireless charging highway. In Proceedings of the 2016 IEEE 21st International Workshop on Computer Aided Modelling and Design of Communication Links and Networks (CAMAD), Toronto, ON, Canada, 23–25 October 2016; pp. 89–94. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | DSRC | 3G-UMTS | 4G-LTE | 5G * | Wi-Fi |
|---|---|---|---|---|---|
| Sub-6 GHz | |||||
| Coverage | 1 km | 10 km | 30 km | 1–2 km | 100 m |
| Max. throughput | 3–27 Mbps | 2 Mbps | 300 Mbps ** | Gbps ** | 6–54 Mbps |
| Mobility support | Medium | High | Very high | Ultra high | Low |
| Bandwidth | 10 MHz | 5 MHz | –20 MHz | 5–100 MHz | 20 MHz |
| Spectrum | Licensed | Licensed | Licensed | Licensed | Unlicensed |
| Feature | Channel Utilization | Collisions | Throughput | Packet Loss |
|---|---|---|---|---|
| Contention-based | Inefficient | High | Medium | High |
| (CSMA/CA) | ||||
| Contention-free | Efficient | Low | High | Low |
| (TDMA) |
| Parameters | IEEE 802.11p DSRC | IEEE 802.11bd DSRC |
|---|---|---|
| Frequency bands | GHz | GHz & 60 GHz |
| Subcarrier spacing | kHz | kHz, kHz & kHz |
| Retransmissions | None | Congestion dependent |
| Waveform | OFDM with BCC | OFDM with LDPC |
| Modulation scheme | QPSK | QPSK, 16-QAM |
| Communication types | Broadcast | Broadcast |
| Parameters | Rel.14 C-V2X | Rel.16 NR-V2X |
|---|---|---|
| Frequency bands | LTE bands | sub-6 GHz and mmWave |
| Subcarrier spacing | 15 kHz | sub-6 GHz: 15, 30, and 60 kHz |
| mmWave: 60, 120 kHz | ||
| Retransmissions | Blind | HARQ |
| Waveform | SC-FDMA | OFDM |
| Modulation scheme | QPSK, 16-QAM | QPSK, 16-QAM, 64-QAM |
| Communication types | Broadcast | Broadcast, multicast, and unicast |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
ElGhanam, E.; Hassan, M.; Osman, A.; Ahmed, I. Review of Communication Technologies for Electric Vehicle Charging Management and Coordination. World Electr. Veh. J. 2021, 12, 92. https://doi.org/10.3390/wevj12030092
ElGhanam E, Hassan M, Osman A, Ahmed I. Review of Communication Technologies for Electric Vehicle Charging Management and Coordination. World Electric Vehicle Journal. 2021; 12(3):92. https://doi.org/10.3390/wevj12030092
Chicago/Turabian StyleElGhanam, Eiman, Mohamed Hassan, Ahmed Osman, and Ibtihal Ahmed. 2021. "Review of Communication Technologies for Electric Vehicle Charging Management and Coordination" World Electric Vehicle Journal 12, no. 3: 92. https://doi.org/10.3390/wevj12030092
APA StyleElGhanam, E., Hassan, M., Osman, A., & Ahmed, I. (2021). Review of Communication Technologies for Electric Vehicle Charging Management and Coordination. World Electric Vehicle Journal, 12(3), 92. https://doi.org/10.3390/wevj12030092