1. Introduction
This paper is based on and updates the publication of the same name presented at the 33rd Electric Vehicle Symposium (EVS33) [
1]. Electric vehicles with electric energy from renewable sources are often discussed as an important instrument to reduce greenhouse gas emissions in the transport sector. However, most studies focus on passenger cars. Nevertheless, heavy road transport is responsible for about one third of CO
2 emissions of all vehicles in Germany and it is expected to grow in emissions beyond the passenger car sector [
2]. Therefore, electrification is also under discussion for heavy-duty vehicles.
1.1. Current Research Status
One research direction examines the technical feasibility to electrify heavy-duty vehicles, taking into account road freight data. Usually, the battery electric range is identified as a critical factor. Based on continuous road freight surveys, Reference [
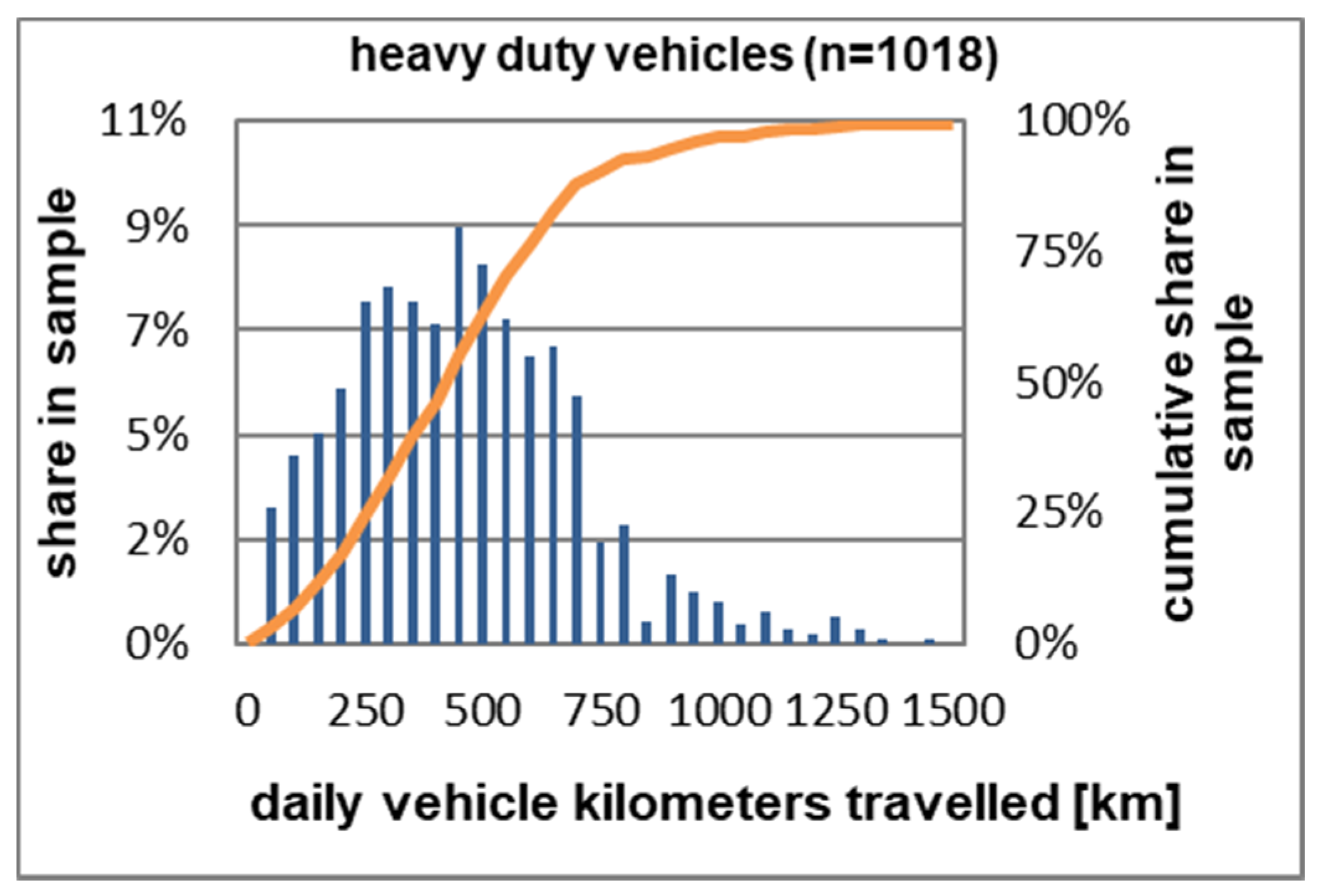
3] identifies 71% of Swiss road freight transport and 35% of Finnish road freight transport as electrifiable by battery electric trucks (BEV). To achieve this, charging power of up to 400 kW is assumed in the long term. The study states 300 km range as a minimum requirement. A full electric range of 300 km would already allow to electrify 30% of the German semitrailer truck fleet (according to Germany’s largest survey for heavy-duty vehicle traffic [
4]) (
Figure 1). Still, this would make a battery capacity of more than 300 kWh necessary which would weight more than 1.4 tons, even as late as in 2030 [
5]. Research from Switzerland shows that battery swapping instead of fast charging can significantly increase fleet electrification, too [
6]. The results with battery swap are quite similar to those with fast charging from [
3]. A third option to electrify heavy-duty vehicles are overhead catenary trucks. These vehicles charge during travel via a pantograph on an overhead line. Reference [
7] assume different rollout scenarios of overhead lines at German highways and calculate energy consumptions and battery sizes. The mentioned studies analyze technical aspects in great detail. However, electrification potential is determined at a high level, e.g., with country-wide fleet samples. Other aspects of feasibility, such as trip-specific requirements or in-depth cost analysis, are mostly excluded from consideration.
Another research direction therefore examines a possible market diffusion of alternative drivetrains for heavy-duty vehicles, taking techno-economic aspects into account. Reference [
8] determines, inter alia, costs for battery electric trucks and overhead catenary trucks. Reference [
9] operates with a German vehicle sample and determine the techno-economic potential for battery electric trucks and overhead catenary trucks for every driving profile until 2030. Based on this, effects on the energy system can be determined, as shown in [
10,
11]. Reference [
12] used freight flows and vehicle costs to identify the most relevant routes for overhead catenary trucks in Germany. Reference [
13] presented total cost of ownership calculations for battery electric trucks and battery swap trucks in China. They find battery electric trucks more cost competitive than battery swap trucks. An additional overview of peer-reviewed studies with regard to the market diffusion of alternative drivetrains for heavy-duty vehicles can be found in [
14]. In this research direction, the consideration of costs allows for estimates regarding market success. Nevertheless, important aspects for the success of a technology remain disregarded. For example, the actual readiness of alternative vehicles is neglected. This can lead to market success falling short of expectations and models overstating the opportunities of a technology.
To overcome this limitation, Reference [
15] introduced a six-part evaluation, taking technical, economic and environmental aspects into account. They use it to compare diesel trucks, LNG trucks, battery electric trucks, overhead catenary trucks and fuel cell electric trucks. In particular, technology readiness levels make it possible to compare the development status of different vehicle alternatives. However, the dimensions used are only partially suitable for a dedicated comparison of different electrical options.
1.2. Objective
This paper aims to give a comparative overview of pure electric truck alternatives in seven dimensions, to provide a broad basis for a decision-making process with regard to technical and economic aspects. To achieve this, we use the experience gained from two pilot projects. We focus on electric trucks above 12 t gross vehicle weight and take three different types of electric trucks for one specific scenario into account:
- (1)
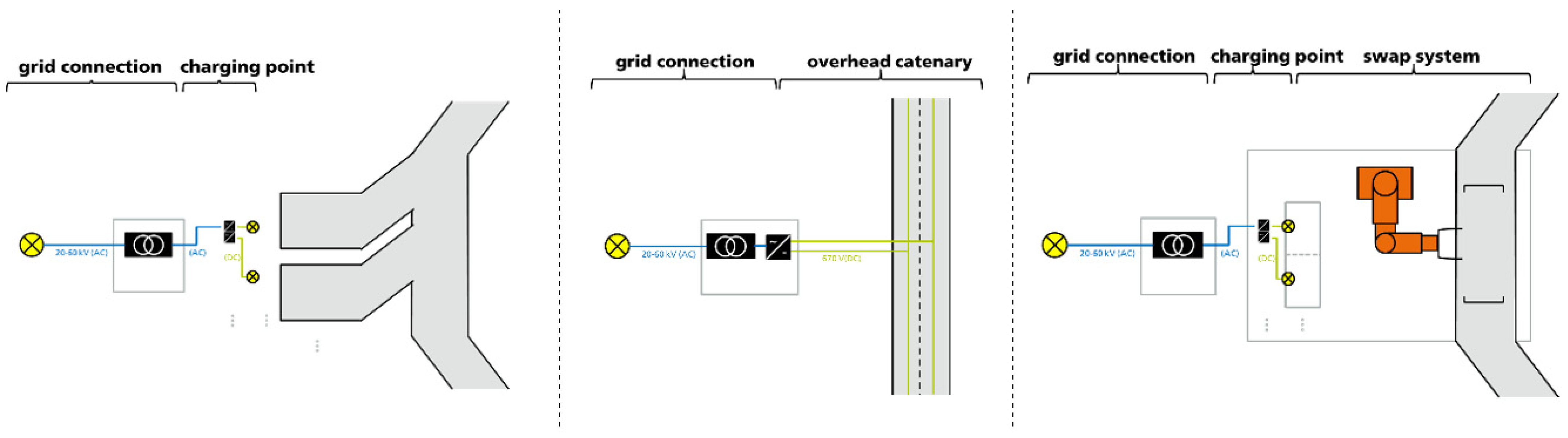
Battery electric trucks with a fast charging option (BEV). All driving energy is stored in the battery that has to be recharged regularly.
- (2)
Overhead catenary electric trucks (CV). These trucks can be operated via a pantograph to obtain electricity from the overhead lines. If power supply exceeds driving power, the battery can be recharged during driving. For driving off the line, driving energy might stem from an additional internal combustion engine or a battery that allows for electric driving compared to the battery electric vehicle. Here, we only discuss a full electric CV without an internal combustion engine.
- (3)
Electric trucks with a changeable battery (BSV). Operation is similar to battery electric truck. Instead of recharging, the empty battery in the truck is swapped for a fully charged one. Charging these batteries can thus happen slower during times where no battery swap is demanded.
As shown in the literature, mainly technical and economic aspects are of special interest. We compare the aforementioned electric truck drivetrains with regard to the following seven dimensions:
- (1)
Technical readiness of the vehicle,
- (2)
necessity of vehicle standardization,
- (3)
possibility to be operated in niches,
- (4)
technical readiness of infrastructure,
- (5)
long-term infrastructure cost (per km),
- (6)
operational flexibility and
- (7)
total cost of ownership (TCO), including both vehicle and charging infrastructure cost.
Our work differs from the existing literature in three aspects. First, we compare all three known options to directly electrify heavy-duty vehicles. Previous work usually compares a maximum of two options. Second, we consider one specific realistic but challenging transportation task to identify weaknesses of the different technologies. In particular, we consider necessary parking periods as trip-specific requirement. This is not possible in studies based on daily mileage. Third, our multidimensional approach allows us to identify barriers that are not detected by a purely economic or technical perspective.
This paper is structured as follows. In
Section 2.1, we present three pilot projects that complement our analysis, as well as the derived vehicle usage scenario. Afterwards, in
Section 2.2, we describe the methodology and provide in-depth information on the chosen evaluation dimensions.
Section 2.3 contains the most important input data. In
Section 3, we present our results. Finally, in
Section 4, we discuss our findings.
4. Discussion
Our results represent a wide range of potential electrification options for heavy-duty vehicles. Compared to previous work on electric drivetrains for heavy-duty vehicles, we add the BSV as third alternative compared to pure battery vehicles with fast charging infrastructure (BEV) and CV.
To the best of the authors’ knowledge, this is the first study to compare these three options using information from actual implemented pilot projects. Previous studies were based on announcements by manufacturers (cf. [
15]). Our results confirm the assessment of BEV and extend the consideration to include CV and BSV. Our setting is typical for a long-distance shuttle traffic and thus considers a relevant market. Since the technical readiness highly depends on the requirements future studies should consider further settings.
Compared to previous work, we identified standardization as another key aspect of market introduction. Our approach to identify additional components considers the problem on a high level and is characterized by experience from the pilot projects. Future studies could further analyze the vehicles at component level or evaluate beginning standardization processes.
Our analysis on niche applications and long-term infrastructure costs reveal a major conflict in the electrification of HDV. The overhead catenary system, as the most cost-effective solutions in the long-term comes with the highest ramp-up costs. The direct comparison shows that a combination of different electric drivetrains at different stages of market diffusion could be effective. For example, fast charging infrastructure for BEV could be designed as stationary overhead charging points. Then, the CV could charge locally at an early stage of market diffusion, reducing necessary overhead line construction. These considerations need to be evaluated in terms of their cost-effectiveness, but are highly relevant to the infrastructure and vehicle standardization currently under development.
Compared to previous studies, the CV has a large battery capacity. This results from the fact that the route in our setting is only partially equipped with overhead lines. At the same time, the CV gains operational flexibility compared to the alternatives without generating significantly higher overall costs. As shown in [
19], further overhead catenary infrastructure could even increase the economic efficiency of CV.
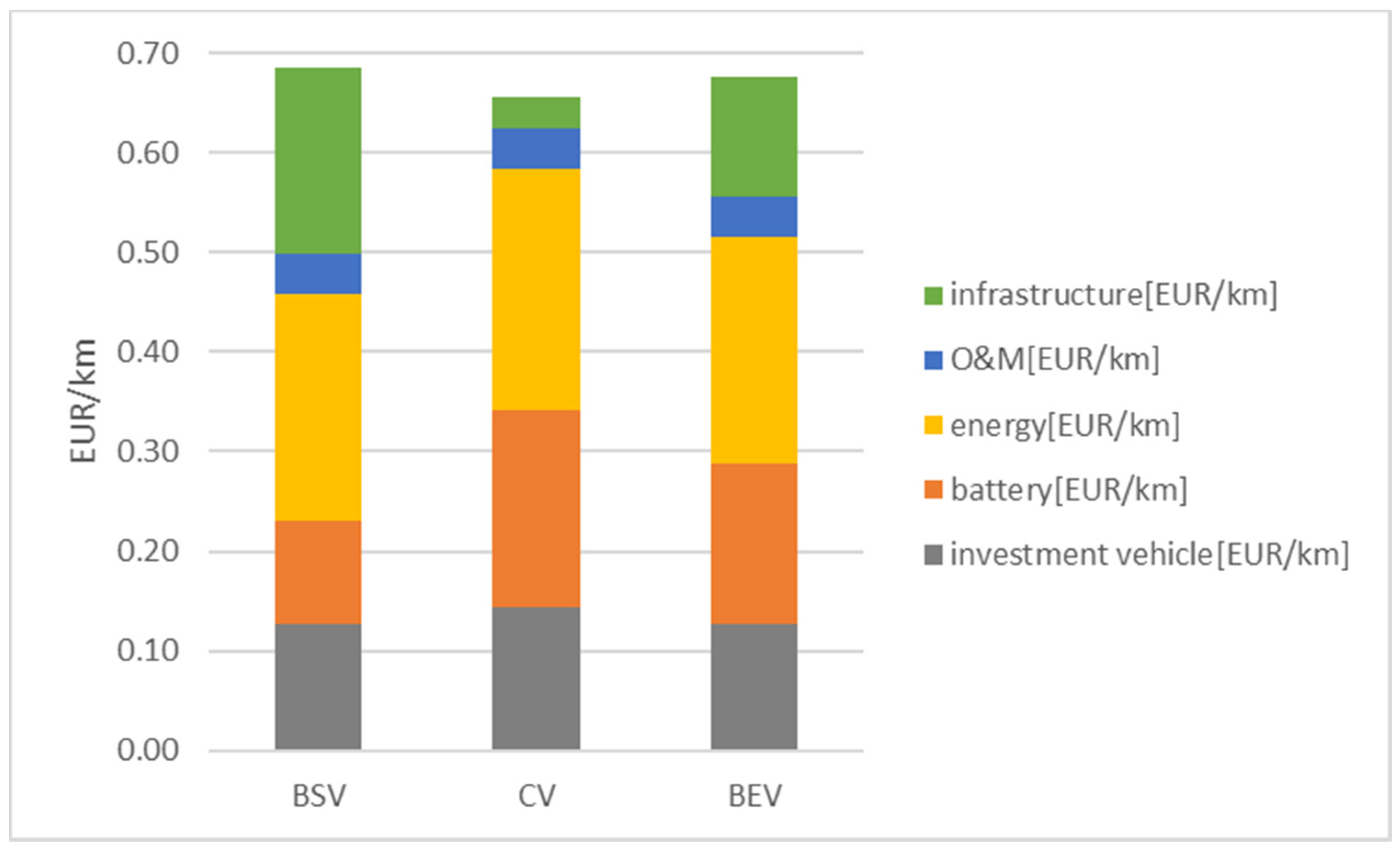
The results show that in the long term all alternatives considered are competitive with each other from a cost perspective. Since energy prices and future battery development in particular are subject to uncertainty, sensitivities were calculated. Despite higher energy consumption of the CV, its slight advantage remains stable. Sensitivity analyses in which the electricity price was increased by 25% reduce its advantage over the alternatives by one percentage point. If the battery price increases by 25%, all alternatives reach cost parity.
All in all, our multidimensional assessment allows insights beyond the pure cost structure. The consideration of various pilot projects provides a practical perspective and can highlight issues that are not identified in techno-economic system studies. However, these advantages also lead to some limitations. Our research represents a momentary snapshot and is based on a predefined setting. This was identified as a typical use case in consultation with freight carriers. However, a significant change in the setting can lead to significant changes in the cost structure. Future studies should examine the applicability to other heavy-duty vehicle operations.
Based on our research, we recommend that decision-makers in politics and business combine the advantages of the alternatives presented here. As a first step, BEV and possibly BSV should be used to bring electric vehicles to market without a large-scale infrastructure. However, a gradual introduction of CV, which is more favorable at high penetration rates, should also be considered. This includes developing both systems interchangeably, for example by making the pantograph the standard technology for stationary charging.







{kind=link}
{kind=link}
{kind=link}