Optimal Speed Regulation Control of the Hybrid Dual Clutch Transmission Shift Process †


Abstract
1. Introduction
2. Problem Formulation
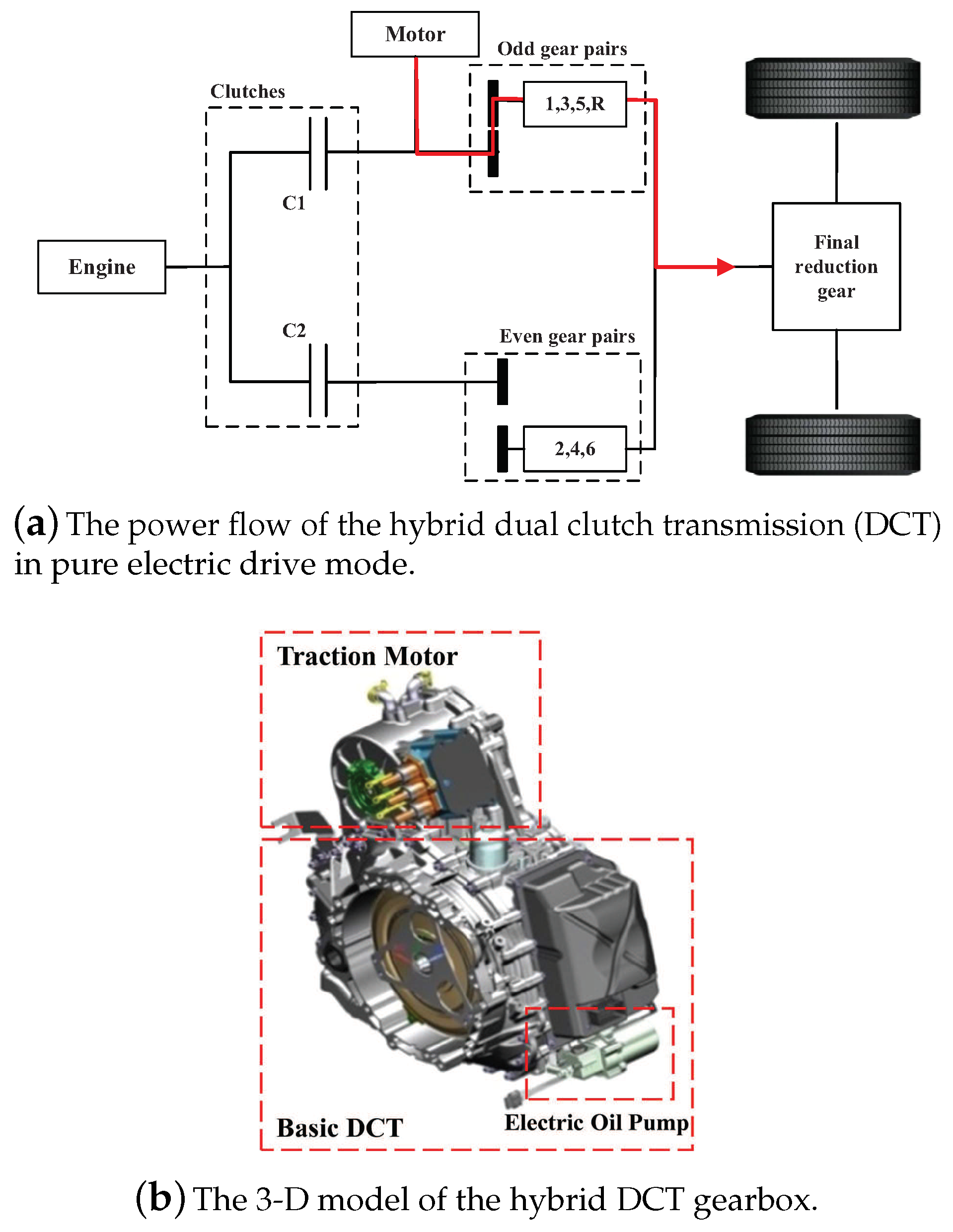
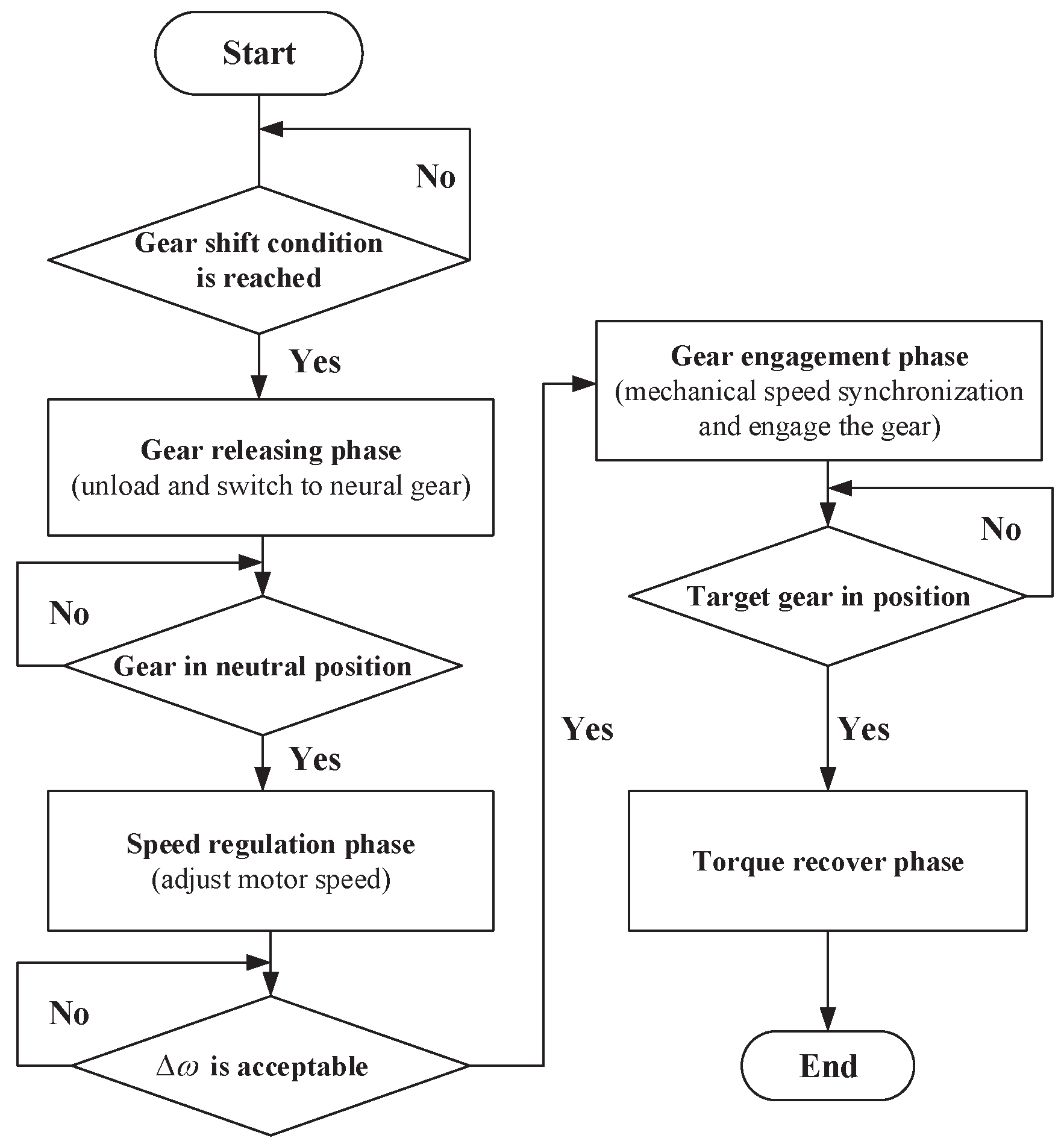
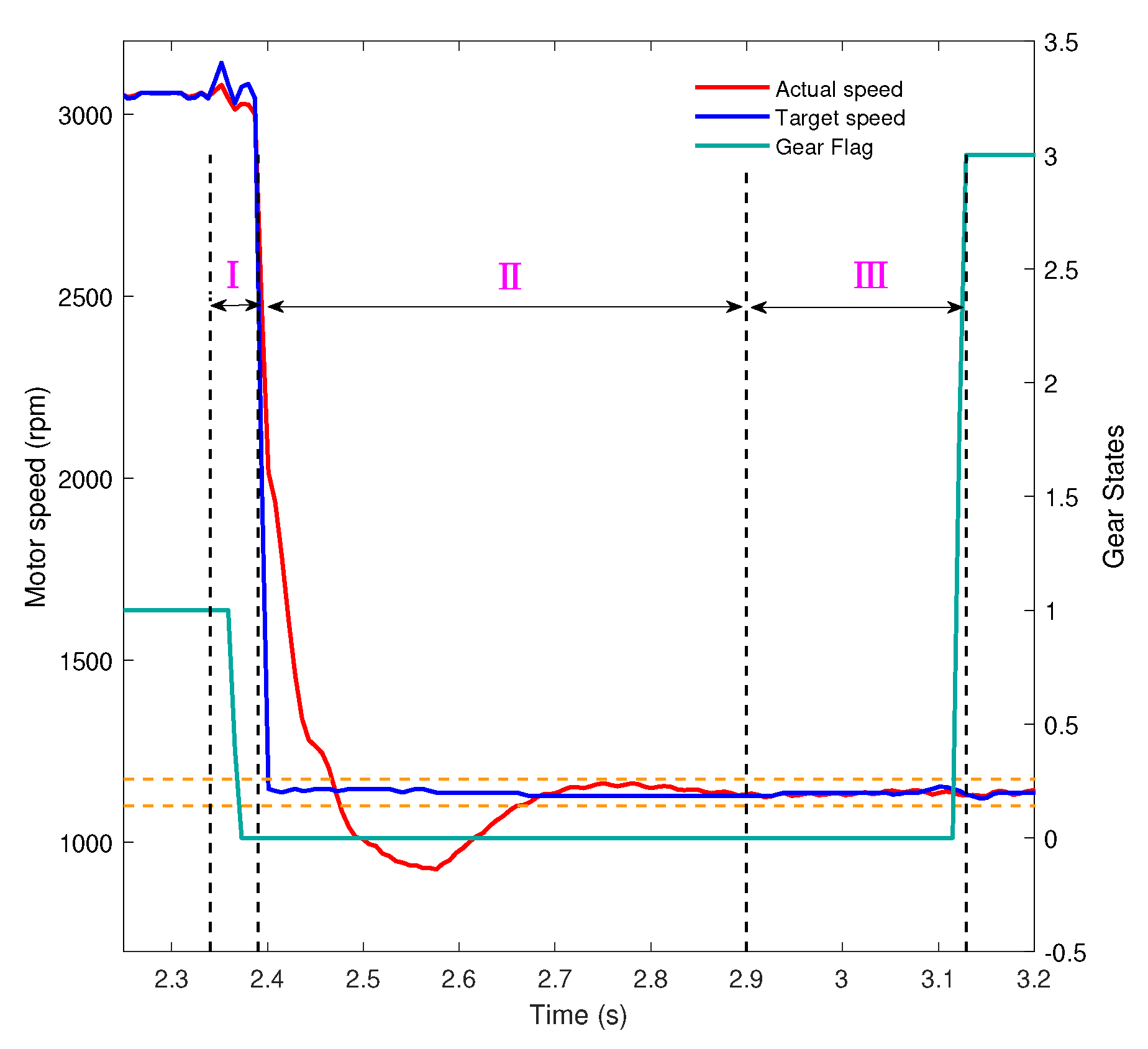
2.1. Gear Shift Process in Pure Electric Drive Mode
2.2. Powertrain Model and Parameters Identification
3. Controller Design
3.1. MPC Controller Design
3.2. Controller Parameters Tuning
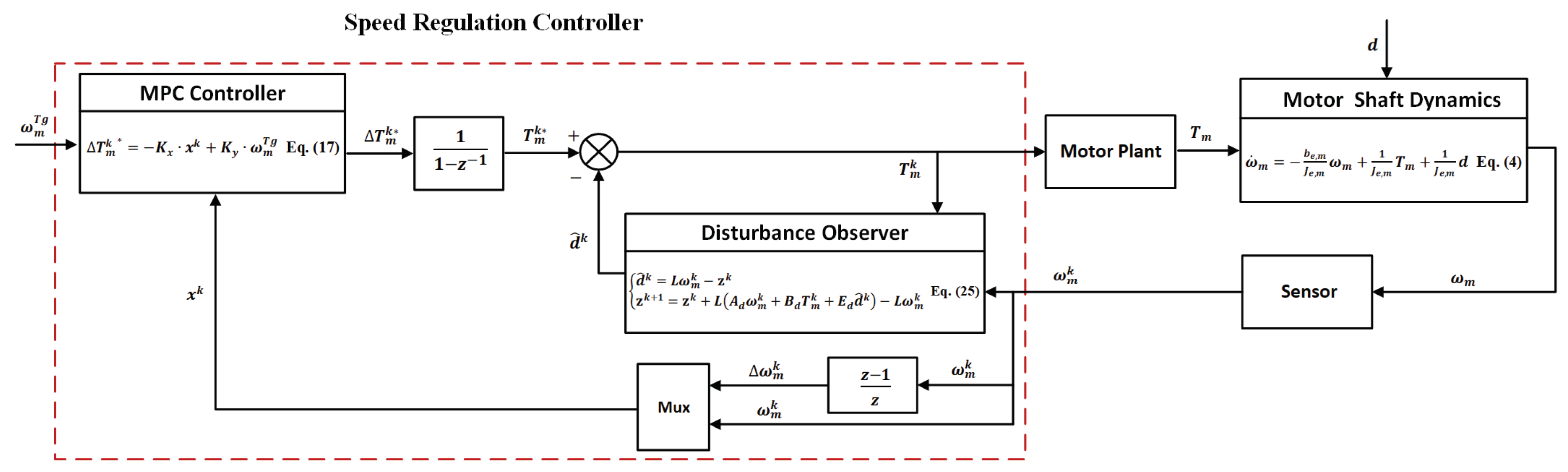
3.3. Disturbance Observer Design
4. Results
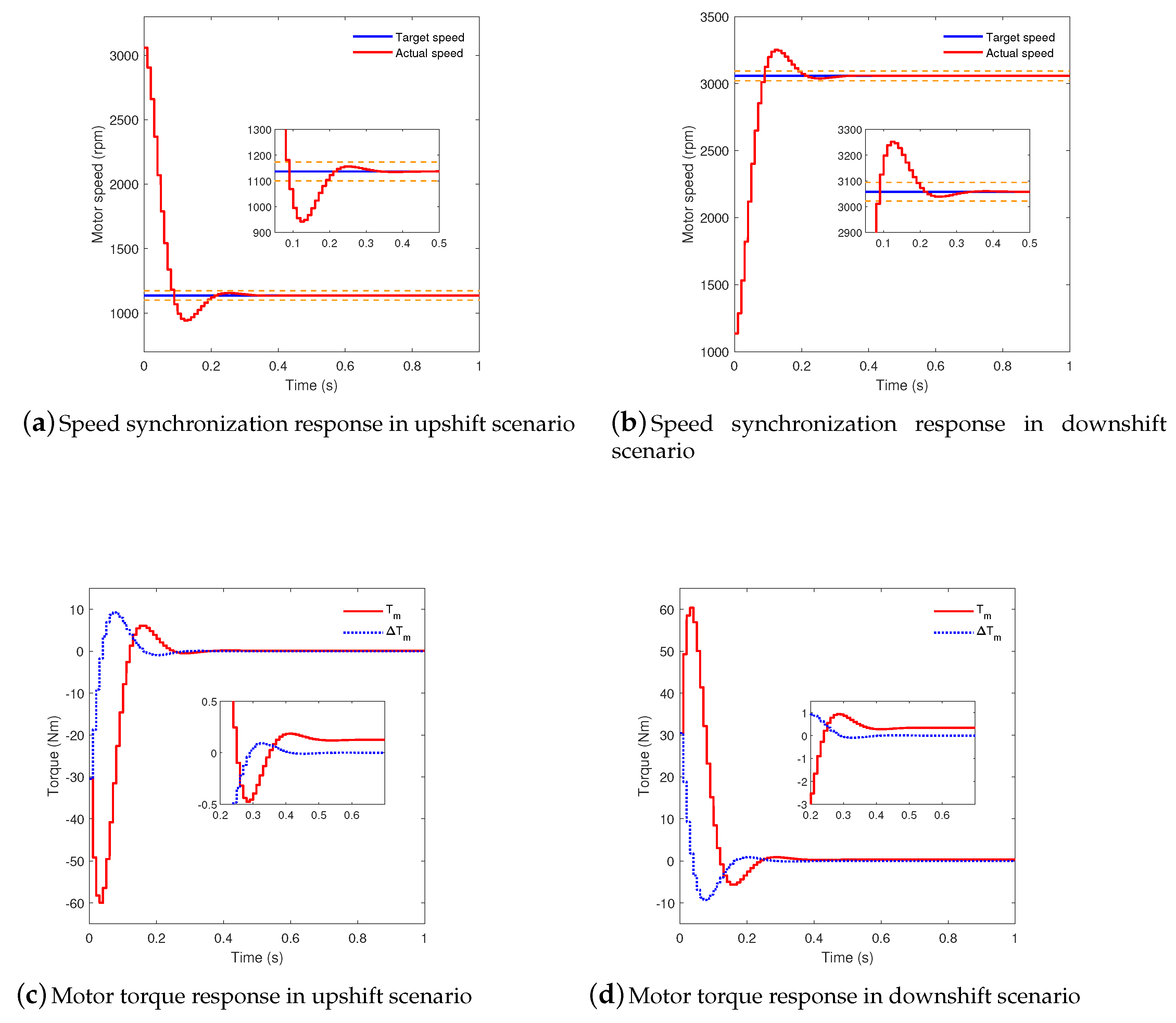
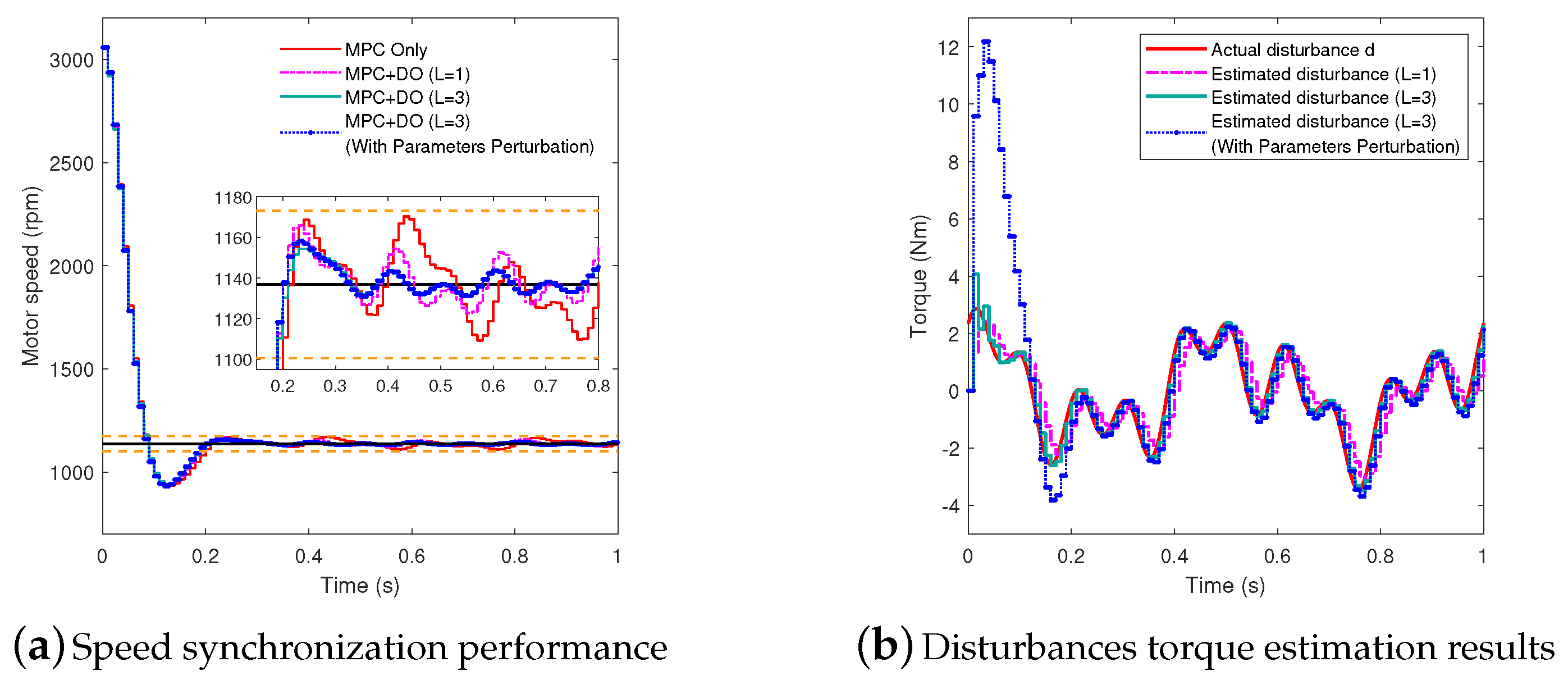
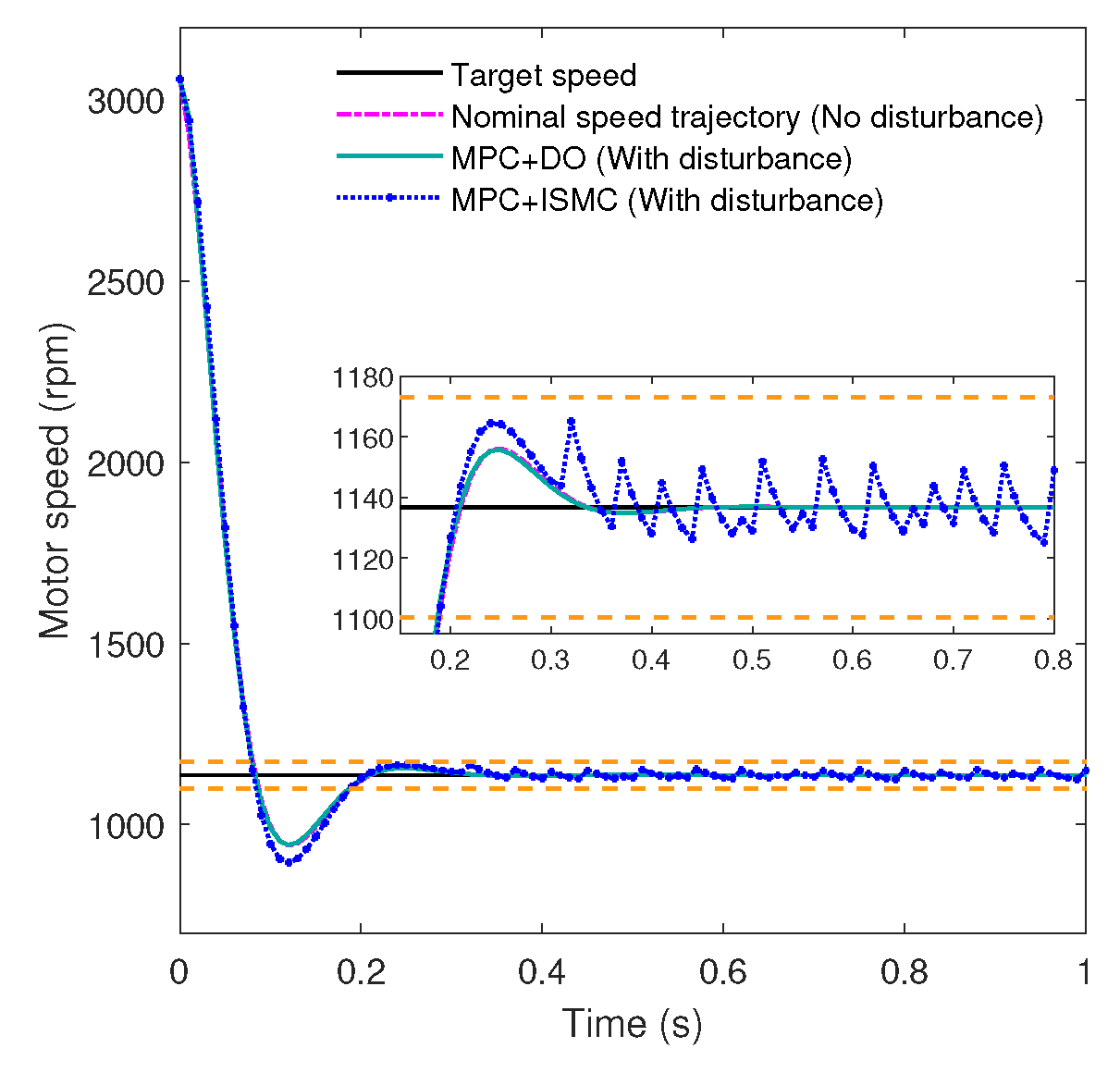
4.1. Simulation Results
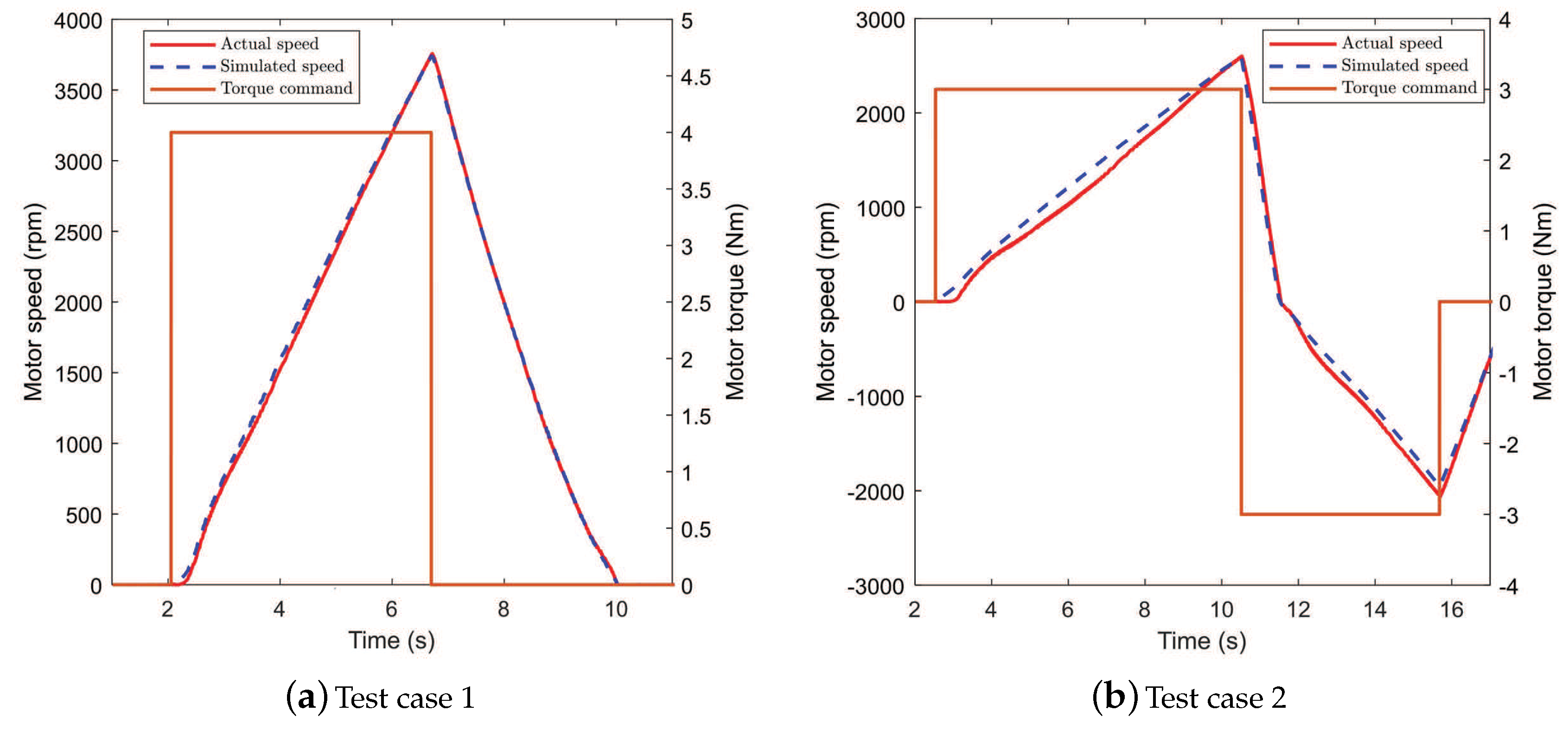
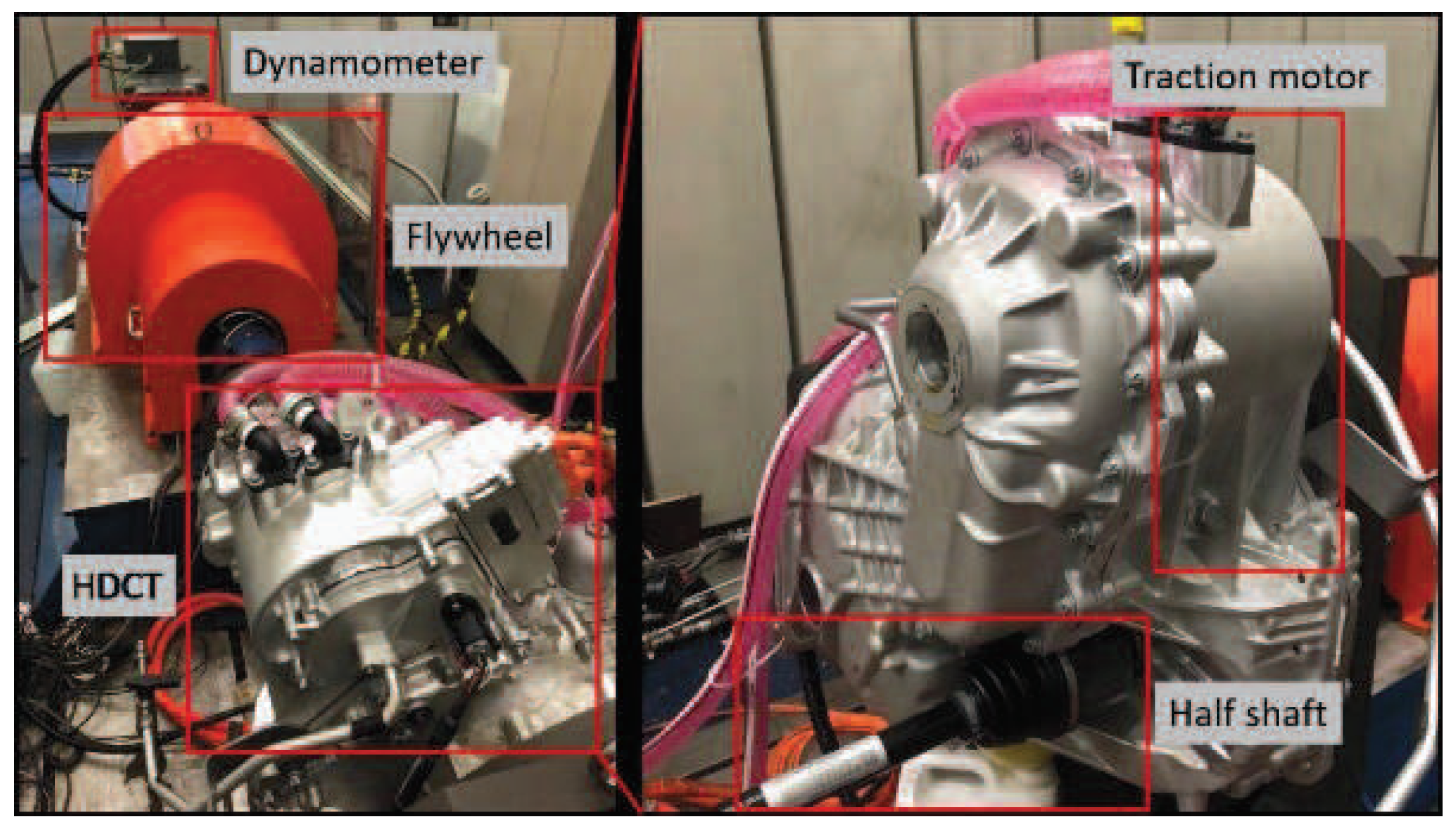
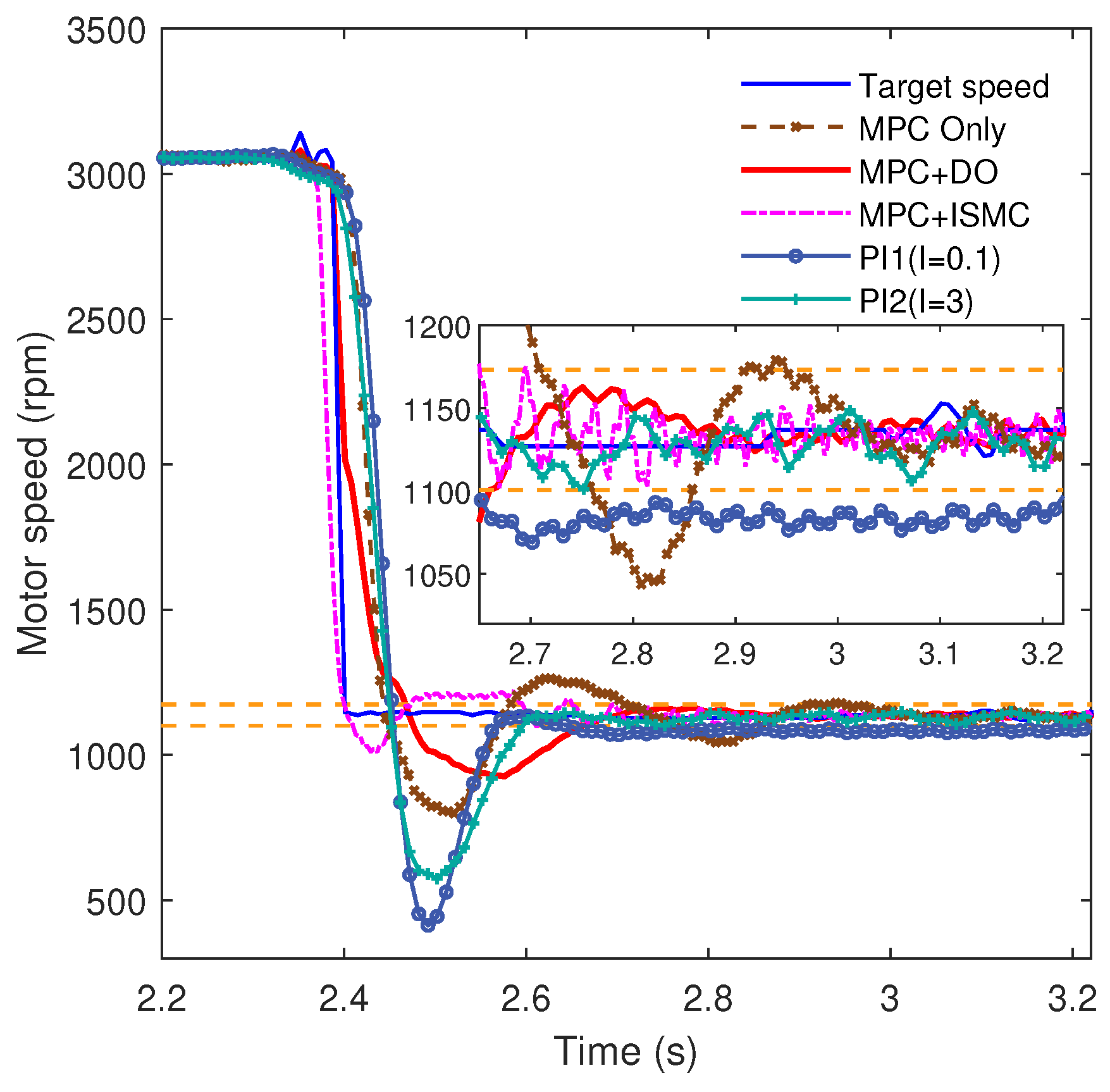
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Walker, P.; Zhu, B.; Zhang, N. Powertrain dynamics and control of a two-speed dual clutch transmission for electric vehicles. Mech. Syst. Signal Process 2017, 85, 1–15. [Google Scholar] [CrossRef]
- Lei, Z.; Sun, D.; Liu, Y.; Qin, D.; Zhang, Y.; Yang, Y.; Chen, L. Analysis and coordinated control of mode transition and shifting for a full hybrid electric vehicle based on dual clutch transmissions. Mech. Mach. Theory 2017, 114, 125–140. [Google Scholar] [CrossRef]
- Ranogajec, V.; Deur, J. Bond graph analysis and optimal control of the hybrid dual clutch transmission shift process. Proc. Inst. Mech. Eng. Part K J. Multi-Body. Dyn. 2017, 231, 480–492. [Google Scholar] [CrossRef]
- Piracha, M .; Grauers, A.; Hellsing, J. Improving gear shift quality in a PHEV DCT within tegrated PMSM. In Proceedings of the 16th International CTI Symposium, Automotive Transmissions, HEV and EV drives, Berlin, Germany, 5–12 December 2017; pp. 1–13. [Google Scholar]
- Liu, H.; Lei, Y.; Li, Z.; Zhang, J.; Li, Y. Gear-Shift Strategy for a clutchless automated manual transmission in battery electric vehicles. SAE Int. J. Commer. Veh. 2012, 5, 57–62. [Google Scholar] [CrossRef]
- Tseng, C.Y.; Yu, C.H. Advanced shifting control of synchronizer mechanisms for clutchless automatic manual transmission in an electric vehicle. Mech. Mach. Theory 2015, 84, 37–56. [Google Scholar] [CrossRef]
- Walker, P.; Fang, Y.; Zhang, N. Dynamics and Control of Clutchless Automated Manual Transmissions for Electric Vehicles. ASME. J. Vib. Acoust. 2017, 139, 1–13. [Google Scholar] [CrossRef]
- Yu, C.H.; Tseng, C.Y. Research on gear-change control technology for the clutchless automatic–manual transmission of an electric vehicle. Proc. Inst. Mech. Eng. Part D J. Autom. Eng. 2013, 10, 1446–1458. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, H.; Xi, J.; Wang, J.; Fang, Z. Robust speed synchronization control for clutchless AMT systems in electric vehicles. Proc. Inst. Mech. Eng. Part D J. Autom. Eng. 2014, 229, 424–463. [Google Scholar] [CrossRef]
- Zhong, Z.; Kong, G.; Yu, Z.; Xin, X.; Chen, X. Shifting control of an automated mechanical transmission without using the clutch. Int. J. Automot. Technol. 2012, 13, 487–496. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, H.; Fang, Z. Speed synchronization control for integrated automotive motor–transmission powertrain system with random delays. Mech. Syst. Signal Process 2015, 64, 46–57. [Google Scholar] [CrossRef]
- Cao, W.; Liu, H.; Lin, C.; Chang, Y.; Liu, Z.; Szumanowski, A. Speed synchronization control of integrated motor–transmission powertrain over CAN through active period-scheduling approach. Energies 2017, 10, 1831–1948. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, J.; Yin, C. Robust speed synchronization control for an integrated Motor-Transmission powertrain system with feedback delay. In Proceedings of the SAE World Congress Experience (WCX), Detroit, MI, USA, 9–11 April 2019; pp. 1–12. [Google Scholar]
- Gahagan, M.P. Lubricant technology for hybrid electric automatic transmissions. In Proceedings of the SAE Powertrains, Fuels and Lubricants Meeting, Beijing, China, 16 October 2017; pp. 1–8. [Google Scholar]
- Alizadeh, H.V.; Boulet, B. Robust Control of Synchromesh Friction in an Electric Vehicle’s Clutchless Automated Manual Transmission. In Proceedings of the IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014; pp. 611–616. [Google Scholar]
- Zhu, X.; Zhang, H.; Xi, J.; Wang, J.; Fang, Z. Optimal Speed Synchronization Control for Clutchless AMT Systems in Electric Vehicles With Preview Actions. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4611–4616. [Google Scholar]
- Cao, W.; Wu, Y.; Chang, Y.; Liu, Z.; Lin, C.; Song, Q.; Szumanowski, A. Speed Synchronization Control for Integrated Automotive Motor-Transmission Powertrains Over CAN Through a Co-Design Methodology. IEEE Access 2018, 6, 14106–14117. [Google Scholar] [CrossRef]
- Yu, C.H.; Tseng, C.Y.; Wang, C.P. Smooth Gear-Change Control for EV Clutchless Automatic Manual Transmission. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Kachsiung, Taiwan, 11–14 July 2012; pp. 971–976. [Google Scholar]
- Rawlings, J.B.; Mayne, D.Q. Model Predictive Control: Theory and Design, 2nd ed.; Nob Hill Publishing: Madison, WI, USA, 2009. [Google Scholar]
- Chai, S.; Wang, L.; Rogers, E. Model predictive control of a permanent magnet synchronous motor with experimental validation. Control Eng. Pract. 2013, 21, 1584–1593. [Google Scholar] [CrossRef]
- Kautsky, J.; Nichols, N.K.; Van Dooren, P. Robust pole assignment in linear state feedback. Int. J. Control 2007, 41, 1129–1155. [Google Scholar] [CrossRef]
- Wright, S.; Nocedal, J. Numerical Optimization, 2nd ed.; Springer Science: New York, NY, USA, 2006. [Google Scholar]
- Fridman, L.; Poznyak, A.; Bejarano, F. Robust Output LQ Optimal Control via Integral Sliding Modes; Springer Science: New York, NY, USA, 2014. [Google Scholar]
- Meshram, M.P.; Kanojiya, G.R. Tuning of PID controller using Ziegler-Nichols method for speed control of DC motor. IEEE Int. Conf. Control Appl. 2012, 1, 117–122. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Variable Name | Value | Unit |
|---|---|---|---|
| Equivalent inertia of the motor shaft | 0.0192 | ||
| Lumped viscous damping coefficient | 0.0011 | ||
| First gear ratio (reduction gear included) | 27.086 | / | |
| Second gear ratio | 10.318 | / | |
| Third gear ratio | 5.872 | / |
| Q | R | ||||
|---|---|---|---|---|---|
| 6 | 2 | diag(0.3538,0.2738,0.2336,0.1837,0.1681,0.1434) | diag(8.656,18.42) | [0.5854,0.1514] | 0.1514 |
| Controller | Speed Fluctuation Range (rpm) |
|---|---|
| MPC only | [1109,1170] |
| MPC + DO (L = 1) | [1123,1158] |
| MPC + DO (L = 3) | [1131,1143] |
| MPC + DO (L = 3) with parameters perturbation | [1129,1145] |
| Controller | Speed Fluctuation Range (rpm) |
|---|---|
| MPC only | [1118,1152] |
| MPC + DO | [1127,1142] |
| MPC + ISMC | [1120,1152] |
| PI1 | fail to get the target speed |
| PI2 | [1106,1149] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, W.; Zhang, J.; Huang, J.; Yin, C.; Wang, L. Optimal Speed Regulation Control of the Hybrid Dual Clutch Transmission Shift Process. World Electr. Veh. J. 2020, 11, 11. https://doi.org/10.3390/wevj11010011
Huang W, Zhang J, Huang J, Yin C, Wang L. Optimal Speed Regulation Control of the Hybrid Dual Clutch Transmission Shift Process. World Electric Vehicle Journal. 2020; 11(1):11. https://doi.org/10.3390/wevj11010011
Chicago/Turabian StyleHuang, Wei, Jianlong Zhang, Jianfeng Huang, Chengliang Yin, and Lifang Wang. 2020. "Optimal Speed Regulation Control of the Hybrid Dual Clutch Transmission Shift Process" World Electric Vehicle Journal 11, no. 1: 11. https://doi.org/10.3390/wevj11010011
APA StyleHuang, W., Zhang, J., Huang, J., Yin, C., & Wang, L. (2020). Optimal Speed Regulation Control of the Hybrid Dual Clutch Transmission Shift Process. World Electric Vehicle Journal, 11(1), 11. https://doi.org/10.3390/wevj11010011