Tony Seba, Professor in Entrepreneurship, Disruption, and Clean Energy at Stanford University, was one of the first scientists to develop an automotive vision of sustainable disruptions. He points out that major disruptive transitions, such as electrification, renewable energy, automation, and the sharing economy, will completely change the ICE-based automotive industry in the coming decade. He stated, ‘only by electrification will society be able to leave the ICE age behind’ [
18].
Multi-level sustainable disruptions are now the starting point for the new Moving@Rotterdam program of the RUAS Research Centre PortCities. Three research professors have joined forces, sharing their disciplines of logistics, mobility, and sustainable transition. The fruitful crossover between the disruptive technologies—electrification, automation, and connectivity—is the basis for the future. Stakeholders from business and policy also support this view. We believe that given the ‘traditional’ automotive values of individual freedom and flexibility and thanks to disruptive technologies, the automobile can consolidate its position as preferred choice for mobility. If the car develops positively in a sustainable way during the 21st century, this will be good for both the ecology and the economy of the Netherlands [
19]. However, we also strongly believe that, in addition to technology, willingness to change is a crucial factor in this transition. In other words, the social part of the innovation process is key. A refusal to tolerate negative aspects any longer is often a driver of social acceptance—think about cigarette smoking in public places. This calls for a closer look at possible underpinning goals that may support the will to change to sustainable automotive mobility. For this, we have defined six tempting ‘zero’ goals to strive for.
3.1. Striving for Six Zeros
The automotive sector is used to working with zero-type goals, Zero Defects being the most famous. Although this seemed unachievable in the short term, through continued improvements such as the Kaizen and Six Sigma approaches, the goal was attained in the long term. This is the most important message in the book ‘The machine that changed the world’ [
20]. It also helped the car industry to adopt efficient and nearly faultless “lean production” at the end of the 20th century. The same principle can be used for sustainable mobility in the 21st century.
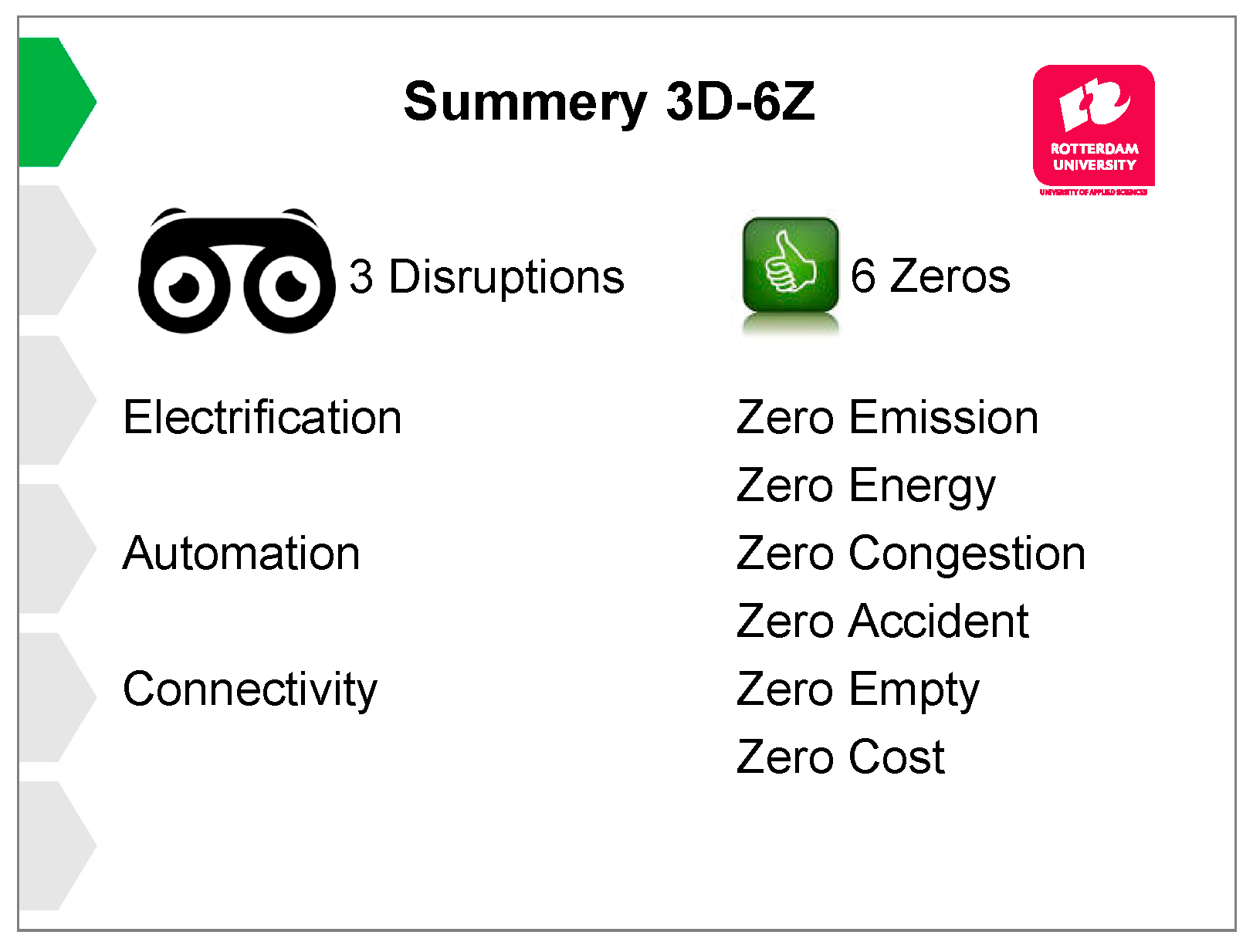
Figure 7 shows the technology disruptions—electrification, automation, and connectivity—in relation to Six Zeros: Zero Emission & Zero Energy, Zero Congestion & Zero Accident, and Zero Empty & Zero Cost.
What if the following situations are imaginable in a foreseeable timeframe?
What if the use of electric vehicles is Zero Emissions being clean and silent, from well to wheel?
What if the use of electric vehicles is in total Zero Energy, not depleting fossil fuel reserves?
What if with automated vehicles it is possible to travel Zero Congestion, avoiding time loss?
What if automated vehicles operate Zero Accidents, not making fatal driving mistakes anymore?
What if connected vehicles are Zero Empty, sharing the available passenger and cargo space?
What if the availability of connected vehicles is Zero Cost, using them for mobility on demand?
The Six Zeros may cause a paradigm shift in how we look at automobility. To explore current possibilities and future consequences, they are put into perspective in the following sections.
3.2. Zero Emissions
CO
2 emissions are everywhere; for most biological and chemical processes, they are unavoidable or necessary. In the 35 counties of the Organization for Economic Co-operation and Development (OECD), energy consumption accounts for 80% of all manmade CO
2 emissions [
21]. Motor vehicles are still dependent on oil as their main energy source. Consequently, road transport accounts directly for about 20% of CO
2 emissions in Europe [
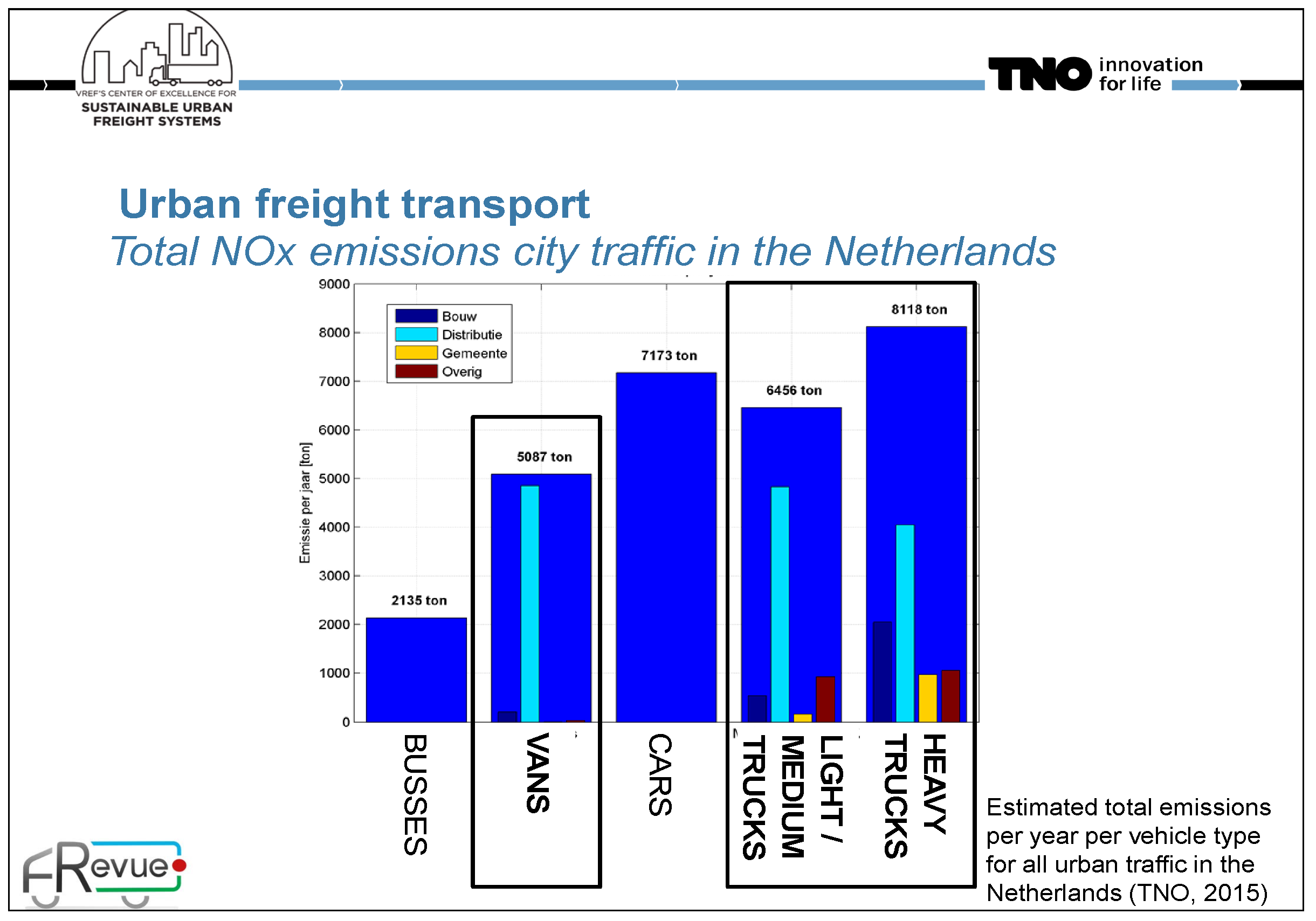
22]. Apart from the climate change risk by greenhouse gasses, toxic tailpipe emissions and traffic noise are an increasing threat to the air quality and livability of our urban areas. Currently, trucks, cars, vans, and buses are the big polluters when it comes to NO
x in Dutch cities (see
Figure 8) [
23]. Road traffic also contributes significantly to soot particle emissions, directly increasing the risk of lung diseases [
24]. According to the World Health Organization (WHO), more people die from poor outdoor air quality caused by road traffic than from road accidents [
25]. According to the EEA Air Quality in Europe report 2018, road transport is one of the main sources of air pollution, and the upper limits for the most harmful emissions—nitrogen oxides (NO
x), ground level ozone (O
3), and particulate matter—are widely exceeded [
26].
Emissions from vehicle propulsion are avoidable. Trains, trams, and metros were electrified decades ago, and, in the early years, cars were electric too. In 1914, 2.4% of the Dutch car fleet was battery electric [
27]. After an initial success however, electrification lagged behind for practical reasons. The range was too limited, the batteries were too big, heavy, and expensive, while oil was far more energy dense and cheap. Today however, thanks to improved electronics and batteries, a 500 km range per charge and fast charging within an hour are possible for battery electric vehicles (BEVs).
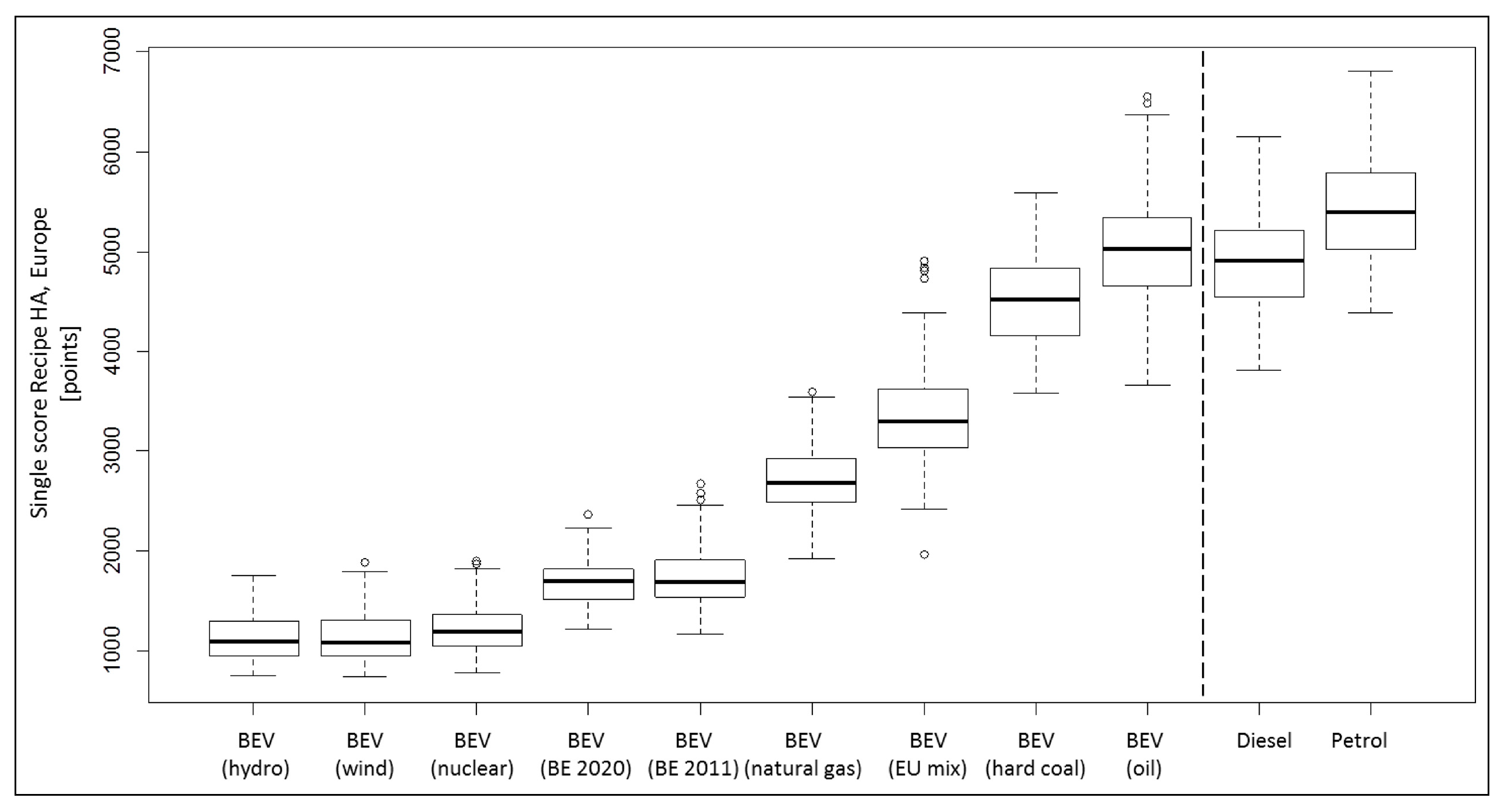
BEVs’ zero tailpipe emissions and zero engine noise have an immediate positive effect on local air quality and livability. Depending on the energy source, emissions in the energy supply and manufacturing chain can also be ultra-low or even zero. In contrast to some popular opinions, the total environmental impact of BEVs driven on electricity generated from hard coal proves to be better than that of the current ICE car (see
Figure 9) [
28]. It has also been shown that the impact is even four times lower when renewable electricity is used. In the Netherlands, all public charging stations offer electricity from renewable energy sources such as water, sun, and wind power. In the Lombok district of the city of Utrecht, electricity from photovoltaic solar panels on roofs is directly used via a smart grid to power BEVs. Therefore, these energy chains are completely emission-free already. Moreover, electric cars are more and more seen as providing storage capacity for the fluctuating renewable energy and are, in that respect, helping the transition to sustainable energy.
Last but not least, constant noise emissions from traffic is an increasing problem, especially in cities. The city of Rotterdam claims that in 2013, traffic noise caused about 60,000 citizens’ health problems and reckons that EVs can reduce noise by about 10 dB at low urban speeds [
29]. At EU level, it is estimated that 100 million people are affected by harmful noise levels above 55 dB during the daytime and 60 million above 50 dB during the night, of which road traffic is the dominant source [
30]. As a result of such exposures, approximately 16,600 cases of premature death from noise exposure occur each year in Europe. The EU’s 7th Environment Action Programme sets the objective that, by 2020, noise should be significantly reduced, as recommended by the WHO.
Today, we are not able or forced to drive emissions free everywhere for all road transportation. However, more and more cities are banning emitting vehicles. Electrification of all vehicles will lead to total emission-free road transportation, in due course. Technical proof already exists that all vehicles can be electrified and, if powered with clean renewable electricity from sun, wind, and water, automobility will no longer have an effect on climate, air quality, and noise. Zero Emissions is only a question of time!
3.3. Zero Energy
Moving around requires energy, that is a law of physics. However, some forms of movement do not need a thermodynamic process; rather, they use the energy that is freely available in nature, like birds climbing on warm air or boats sailing in the wind. In fact, nature provides them with energy (indirectly) from the sun.
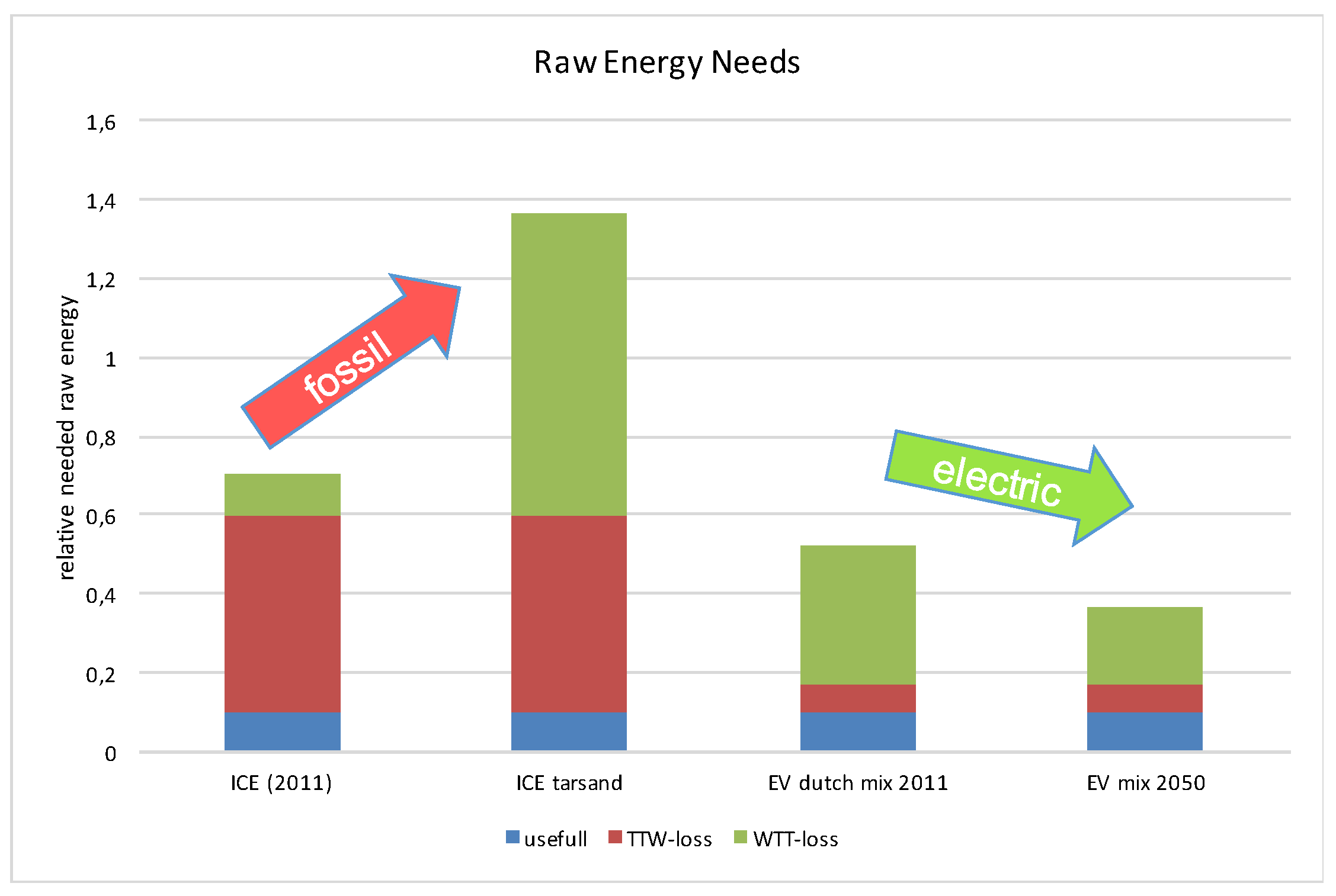
The ICE uses a reciprocal thermodynamic process by burning fuel such as petrol or diesel. The big advantage of these fuels is that they are very energy dense. The big disadvantage is that the burning process is very inefficient because of thermal losses caused by necessary cooling and unavoidable tailpipe emissions. In ideal laboratory conditions, an unequipped ICE can reach 40% efficiency in its so-called sweet spot. This means that only two-fifths of the energy content in the fuel is transformed into useful mechanical power. In practice, with variable speed and load and the engine fully equipped, efficiency is significantly lower. This power system, which has been used for over a century in our cars, is in fact a better heater than an engine. The efficiency of an electric traction motor is much higher: 85% is feasible at all loads and speeds. Including inverter, battery, and charger losses, the practical efficiency is still around 70%. The above compares tank-to-wheel (for the ICE) with plug-to-wheel (for the EV) efficiency, which relates to the vehicle itself. A more realistic and fairer way is to access the total energy chain from (energy) well to (car) wheel. This means that how the fuel and electricity are produced and distributed has also to be considered.
For fuel, this chain starts with the drilling of oil from the well. In the pioneer days, the oil gushed from the wells and only the drilling needed energy. The time of easy oil is over, however; water injection, deep-sea drilling, tar sands, and fracking are needed nowadays to meet our oil demand. This is not for free. According to Shell, one barrel of tar sand oil needs the equivalent of at least one-third of a barrel of oil to get it out of the tar sand (by steam). The so-called energy return on (energy) invested (EROI) has dropped from a traditional 25:1 to less than 3:1 [
31]. Transporting the oil, refining it into petrol, diesel, or LPG, and finally, distributing the fuel takes a significant amount of energy too. And increasing energy use in the fossil chain, especially at the source, decreases the future well-to-wheel efficiency, as already shown in
Figure 4 [
12].
Electricity is not readily available from a well. Instead, it is generated from different energy sources, such as coal and gas or water, wind, and solar sources. Modern electricity utilities that use coal and gas have an energy efficiency of between 40% and 60%. Hydropower plants, windfarms, and solar parks do not need additional energy, so they do not contribute any loss to the energy chain. After generation, the electricity has to be transported over a high, mid, and low voltage infrastructure, and this does lower the well-to-wheel efficiency of EVs [
12]. Electricity from the grid does not come from one source, but as a mix. The current efforts being made to ensure that this mix contains more and more electricity from renewable sources will increase EVs’ well-to-wheel efficiency in the future.
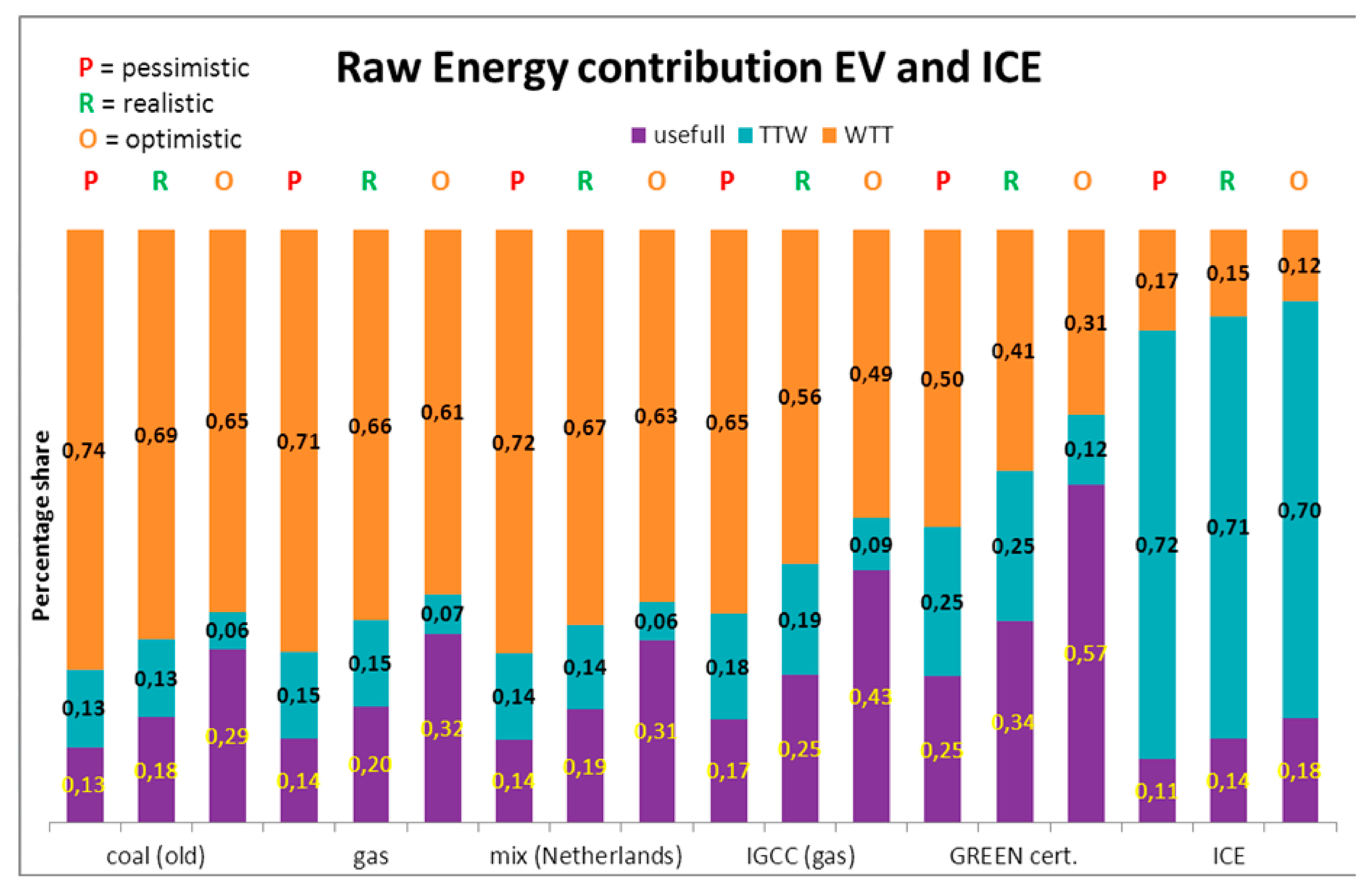
As already shown in relation to emissions in
Section 3.2, studies on well-to-wheel efficiency make it clear that even the worst-case efficiency of an EV with electricity from coal-fired utilities is still equal to, or better than, the ICE’s efficiency (see
Figure 10) [
12]. Even after more than a century of development, wasting about 85% of energy is unfortunately a fact for ICE technology. However, EVs running on electricity from renewable energy—as the majority do—are on average three times more efficient than cars using combustion technology.
But there is more. In 2013, for the Solar Challenge, students at the Technical University of Eindhoven designed the prize-winning Stella, a lightweight passenger car with photovoltaic cells on the roof (see
Figure 11) [
32]. This concept car seemed to be energy positive. On the race day, it harvested more solar energy than needed for racing. The alumni started a company and developed the Lightyear One, which should be ready for commercial introduction to the market in 2021. Waste energy can also be used as a free source, like in the proposed Hedgehog™ System project at the central station in Apeldoorn [
33]. Electricity from the braking of incoming electric trains will be stored in batteries and used to fast-charge the electric city buses. Mobility is all about energy efficiency. That is why the strict energy efficiency targets in the recent EU CO
2 regulation with which car and truck makers have to comply in 2025 and 2030 led to the announcement of an avalanche of new electric vehicles [
34].
Zero Energy is the way we could move in the future! 3.4. Zero Congestion
In most urban areas, congestion is a daily recurring phenomenon. A well-known example of human driving behavior in dense traffic is the shockwave effect causing unnecessary phantom traffic jams [
35]. A push toward Zero Congestion could mean a system of shared autonomous vehicles (SAV) that communicate intelligently with potential users, other vehicles, and the road. The SAV system can operate as an on-demand taxi service; it could provide a low-cost service to travelers and possibly replace the need for personal vehicles. This would resemble the Rivium ParkShuttle near Rotterdam, which offers a reliable and cost-effective on-demand shuttle service at SAE automated driving level 4 (SAE has standardized safety levels for automated vehicles; level 4 is driverless in a restricted environment) (see
Figure 5) [
36]. These future driverless taxis, or so-called PODs, will avoid congestion and collision due to the ability to automatically optimize routing and adapt driving. Meanwhile, they pick up other passengers to share the same ride with minimal increases in travel time and costs. Obviously, it is reasonable to expect that SAVs will operate in areas with high passenger/freight loads.
Previous studies [
37,
38] assuming that all travelers use SAVs found that each SAV could service multiple travelers, reducing the number of vehicles needed in the whole SAV fleet. Although 100% SAV use is unlikely to occur in the near future, previous results suggest great potential benefits when SAVs become viable. Strategies such as preemptive relocation of SAVs to meet expected demand [
39] or dynamic ride sharing [
40] are additional options for improving the service. Dynamic ride sharing is a system that uses one SAV to service multiple traveler trips simultaneously to reduce the SAV fleet size, vehicle miles traveled, and operating costs.
In modelling shared autonomous vehicles, dynamic ride sharing seemed highly effective at reducing congestion by combining traveler trips [
41]. This effect is illustrated in experiments on the downtown Austin network consisting of 171 zones, 546 intersections, 1247 links, and 62,836 trips over two hours during the morning peak. Their study showed that ride sharing had the best travel times when the number of SAVs was small (2000 SAVs providing service to 62,836 travelers) and that these travel times were comparable or even better than the personal vehicle scenarios. They proved that with effective routing heuristics and the right fleet size, SAVs could replace personal vehicles such as for paratransit services or individual taxis. One could argue that users may be less willing to share vehicles or require higher economic compensation, if this causes low reliability of mobility compared to using their own vehicle. Companies or public ownership could severely underestimate the operating costs if they do not consider congestion. It is therefore critical that future work on SAVs have a realistic understanding of the congestion avoidance potential. Still, we are aware that there might be situations in which congestion cannot be avoided. We are confident that the SAVs with dynamic ride sharing are the answer for the future to avoid congestion as much as possible.
Is it likely to happen in the short term? Yes and no. To handle and distribute containers between the terminals in the port of Rotterdam, the Container Exchange Route (CER) has been constructed in 2019. The improved connectivity between different terminals will not only lower the harbor residence time for containers, but will also reduce costs and increase the reliability of the deliver time. At the start of the CER in 2019, an estimated 500,000 containers per year were transported. The Port Authority assumes and provides for growth to ultimately 1,200,000 containers per year by 2030. It was decided to lay out the CER as a separate, closed 14-km track. However, as a result of the labor union’s strong lobbying, the containers will not be transported by autonomous vehicles right from the start, but the system will be ready to do so. Then, the way will be open for congestion-free SAE level 4 container transport [
42].
Some patience is needed to reach Zero Congestion! 3.5. Zero Accidents
Although humans can be amazingly good drivers, their driving failures are a main cause of road accidents. The US National Highway Traffic Safety Administration (NHTSA) states that human failure is the critical reason in 94% of accidents [
43]. More in-depth Dutch research regarding single vehicle crashes indicates that, on average, 66% can be directly attributed to insufficient alertness on the part of the driver (a.o. distraction, speeding, drinking, and fatigue) compared to only 7% caused by a technical failure of the car, mainly tires [
44].
Unfortunately, in the last two years, the number of road accidents has risen again, most probably due to distraction by the use of smart phones [
45]. In the short term, it is hard to prove that automated driving is a solution for better road safety [
46], but given the above numbers, it is likely. Tesla claims that, when the advanced driver assist system (Autopilot) was uploaded, the number of car accidents of the Model S dropped by about 40%. The first fatal crash with this ADAS system activated became world news. Later investigation by the NHTSA proved that the driver had ignored repeated warnings from the system. With Google Car also, the number of accidents was relatively small and, in all cases, due to an incorrect ‘human’ intervention.
In the aviation business, automation is completely accepted, with a proven and high safety rate. As an automotive example, the driverless Rivium ParkShuttle near Rotterdam is over 15 years in service (
Figure 5) [
36]. After some minor accidents in the early pilot phase, it became fully accident-free. As another example, in the fully automated APM container terminal at the port of Rotterdam, no accidents have been reported with these fully automated vehicles (AGVs) (
Figure 6) [
42].
In the Netherlands, a start has been made with the Talking Traffic project [
47], an important part of which is the overall communication system between the car and the environment whereby real-time data are shared between different users of the traffic infrastructure. The aim of this project is that, in the near future, every driver or car will be connected and able to access real-time travel information and driving support via a dashboard screen or navigation system. The Declaration of Amsterdam [
48] about information of traffic and automation of the vehicle claims that connected, cooperative and automated driving should come together to harvest societal benefits.
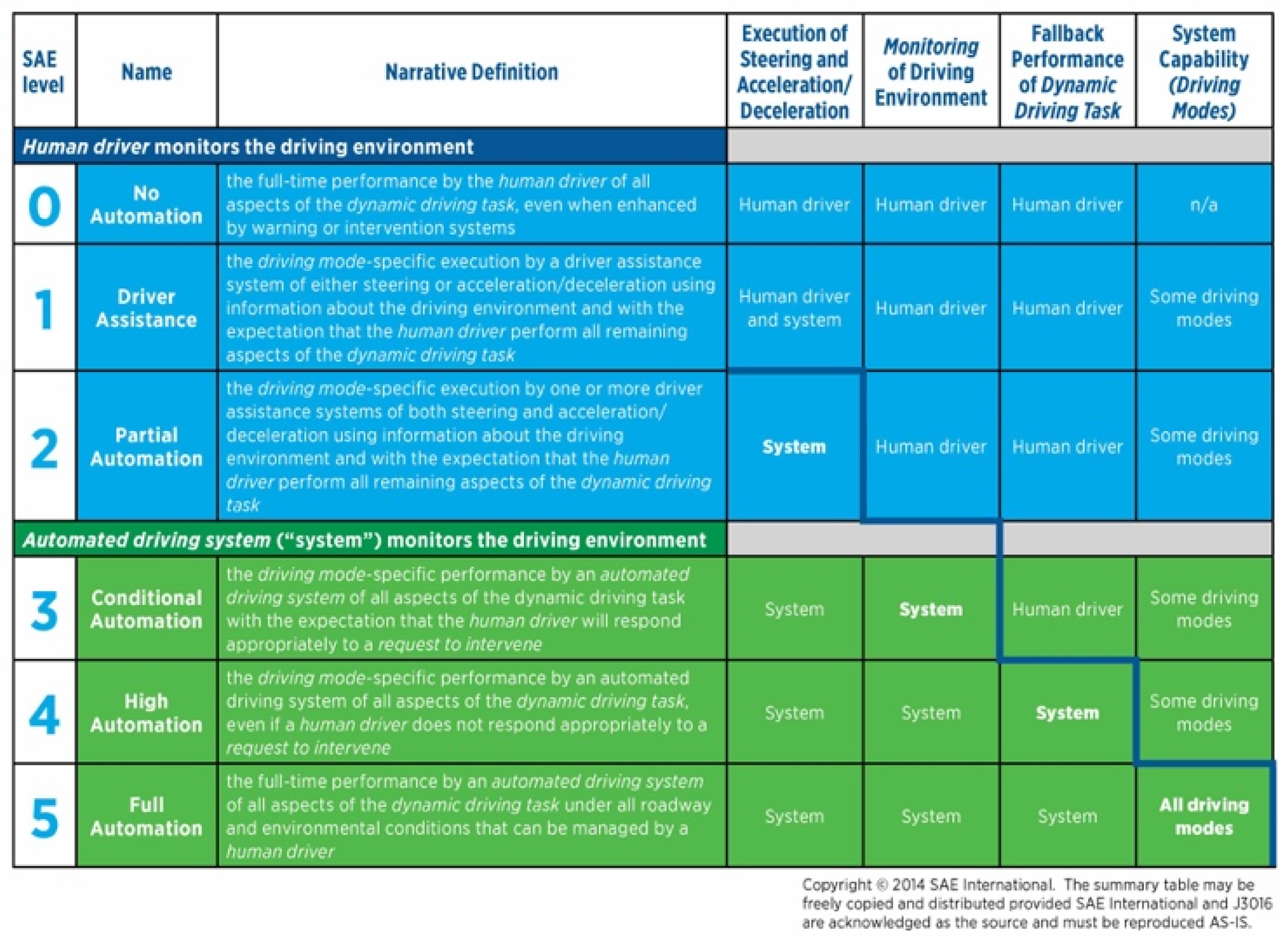
On the route from SAE level 1 (driver-assist, partial automation) to levels 4 and 5 (driver-less, automation), it will be a challenge to give the driver a meaningful task (see
Figure 12). Maybe the most fundamental questions about Zero Accident is not whether the technology will be accurate enough, but whether the user or driver will accept that he/she is no longer fully in charge. To realize this shift, a psychological and behavioral approach must be a serious part of the system. Given the popularity of systems like TomTom and Google Maps, people seem more willing to accept advice from navigation systems rather to find the way by following roadside signposts. New cars are now offered or equipped as standard with self-driving safety functions like adapted cruise control, lane keeping, and automated emergency braking.
The trend to more automated driving makes the roadmap to Zero Accidents hopeful! 3.6. Zero Empty
Do we value the privacy of our own car so much that we love to drive alone? More likely, there is another reason. On average, a five-seat passenger car transports only about 1.2 persons. Commercial vehicles meant for transporting goods are driven without cargo about 50% of the time. For some, “empty container trucking” is even a business (see
Figure 13). Zero Empty trips are a good way to gain efficiency and reduce congestion on our roads. Collaborative connectivity is the key to success. A clear example of successful collaboration in transport logistics is the P&G Tupperware case [
49]. The case uses inter-modal transport but is still relevant, as the line of thought for matching is similar. It showed that the overall process results in a significant reduction in costs and emissions, and meanwhile, the load factor increases strongly, although some parts of the process have increased costs. The following results were obtained:
17% cost reduction;
Capacity utilization increased from 55% to 85%, based on volume and weight;
Over 200 tons CO2 reduction;
It is also concluded that matching criteria are important to realize performance gain. When shipment destinations and goods are matched and the companies do not compete, the result is reduced costs and increased capacity utilization for both companies, even with simple line-haul matching.
A crucial element in collaboration is the willingness to share. Sometimes, the exchange of confidential information and the acceptance of new business models are needed to share all cost gains among the joining partners. In practice, several initiatives can be found as starters who provide software technology to match freight demand to empty truck capacities. For example, the company Quicargo at Amsterdam the Netherlands works with an app and links the supply and demand of multiple transport companies. They focus on B2B (business to business) and domestic transport by offering an end-to-end solution, arranging the financial settlement and monitoring payment and insurance. Currently, many platforms can be found in practice such as FreightUber, Cheapcargo, Tri-Vizor, Destitrans, or Airhunters. Therefore, it is quite realistic to believe that in the near future, the goal of zero empty will be almost met. Imbalance in freight demands cannot be avoided and therefore, will always cause inefficiency in transport. Connected vehicles could easily communicate the free seats or space. Thus, hitchhikers or commuters could find a lift on demand. The French start-up BlaBlaCar already provides this service via mobile telephone. A US study shows that sharing can deemphasize car ownership [
50]. Via Internet of Things, cargo can automatically search for empty container trucks. In fact, the Port of Rotterdam has started Rotterdam Logistics Lab to develop these kinds of sharing services, anticipating intelligent vehicles.
Sharing vehicles will ultimately lead to Zero Empty! 3.7. Zero Cost
In his latest book, Jeremy Rifkin explained that we are entering an age with zero marginal costs [
51]. Marginal cost refers to the increase in total production costs resulting from producing one additional unit of an item. Zero marginal cost describes a situation where an additional unit can be produced without any increase in the total cost of production. For example, an update of new software for an electric autonomous car can be seen as incurring a zero marginal cost because, once developed, it can be distributed remotely to every car without any extra cost.
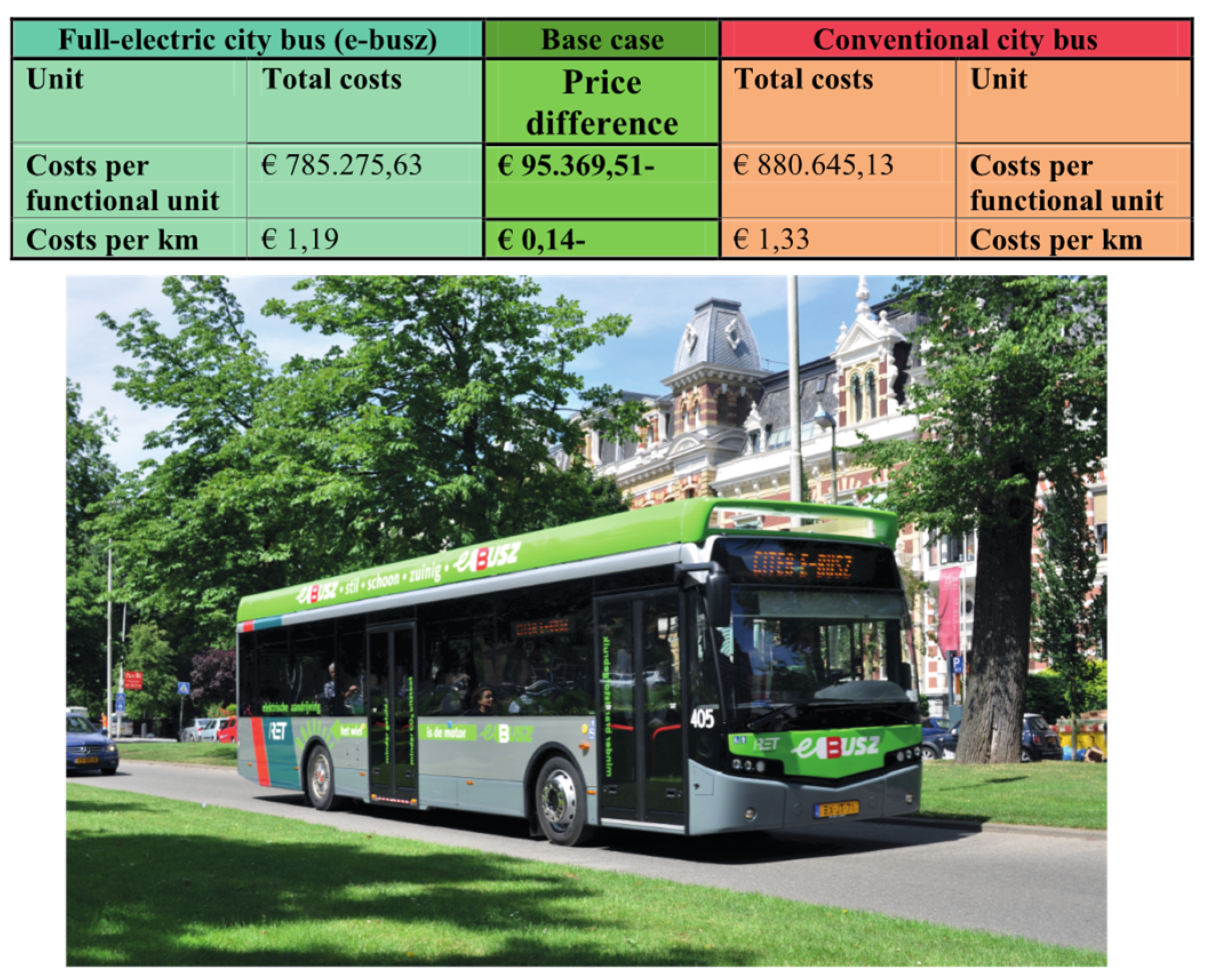
We prefer to speak of zero cost rather than zero marginal cost because with the implementation of new technologies, other examples of cost reduction will occur as well. For instance, electric vehicles are in fact very simple vehicles and will have a cheaper total cost of ownership once economies of scale are reached, thanks to less complicated production, low energy use, and much less maintenance. Real mass production of dedicated EVs, batteries, and other electric traction components is expected to start around 2020. This will finally bring prices down to a level competitive with, or lower than, ICE cars [
52]. Moreover, the cost of maintenance will be low because of minimal moving parts. When a system of driving cars more intensively is reached, cars will be replaced sooner by newer cars with more state-of-the-art technology.
Eventually, the price per barrel of oil will rise, while at the same time, the price of batteries will decline. Within a few years, a reduction will take place of almost 80% per usable kilowatt hour [
53]. Apart from these costs, electric cars are much more energy-efficient, resulting in an impressive reduction in mobility cost. EVs can, as noted in
Section 3.3, be energy-positive or valuable as temporary extra energy storage capacity. In the latter case, they may earn money by storing energy or delivering energy to the smart grid or remote homes. A significant cost reduction will apply not only at car level, but also to the different infrastructures around the car. For example, fewer parking lots and garages will be needed when a system of car sharing and (partly) self-driving cars has been achieved. Cost reductions are also expected when organizational systems such as mobility as a service (MaaS) are fully implemented. No longer will the supply of existing lines and vehicles determine how people can make use of the network; rather, customer demand will be the central starting point. This will cause a shift from owning to using cars and other means of transportation offered by the MaaS system [
54]. Currently, most of the time cars are parked in front of residences (80%) or offices (16%), and just 4% are really driving around. With MaaS usage, the enormous decline in stationary cars will eventually lead to a smaller total number of cars [
55]. With upcoming mobility systems, another fundamental change will occur. Fixed costs will be reduced and variable costs may grow. However, the average cost will be much lower because of a better and more efficient use of the smaller number of available cars. MaaS and other less dedicated and advanced systems (e.g., Car2Go or SnappCar) will influence the way public transport is organized. Unprofitable bus—and maybe also train—lines may be liquidated and replaced by shared (autonomous driving) cars. Moreover, the need for a second family car will decline because any type of vehicle can be ordered on demand.
An abstract aspect of cost reduction will be the way in which we price time. Time will become less expensive because in driverless autonomous cars, ‘drivers’ can use their commuting time productively. Thus, productive time may become less scarce. This kind of cost is hardly taken into account in the way we calculate the costs of mobility. In the future, we can imagine the car becoming the extension of the office, living room, or meeting place. As the Chinese car company NIO stated, the car gave us freedom of travel, now it will give us freedom of time, and time is money. If cars start earning money, we could travel at Zero Cost!



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














