1. Introduction
Light Electric Vehicles (LEVs) are one of the most important alternatives for reaching a sustainable mobility scenario. Most urban trips can be handled by these low weight vehicles (approx. in the same order as the total weight of its passengers or load). This allows very low energy consumption and, therefore, a mobility efficiency superior to that achieved with conventional electric vehicles [
1], as they may be using 30 times less energy than an average conventional car powered by a combustion engine car [
2].
Nowadays, the most used architecture for LEVs is the two-wheeled model, as in electric bicycles or motorcycles. These vehicles have a single drive wheel and their motor control systems are simple and low cost [
3]. However, they present 3 major drawbacks:
High aerodynamic coefficient (with a negative impact on their energy efficiency)
Driver’s exposure to bad weather
Low stability at low speeds
The 3 or 4 wheel enclosed body LEVs appear as an alternative that solve these drawbacks [
4]. They can also work on a single drive wheel, keeping simple and inexpensive but still facing a major drawback: a very low cornering stability that limits their maximum speed [
5].
There are several hardware solutions to improve this stability in tricycles, such as tilt-wheeled designs, but the most common alternative to improve stability is to use a two front wheels motion system [
6]. In this case, they need to rotate at different speeds when changing direction. The use of a mechanical differential is widespread in most vehicles and even in some LEVs [
7]. The main problem with this solution is that they are very heavy and, consequently, are not suitable to be used in highly efficient LEVS. In this case, it is an advantage to implement an Electronic Differential (ED) system.
The main characteristics of the ED are:
There is no mechanical link between the two drive wheels. Each of them is coupled to an electric motor that is independently controlled.
The traction power is independently applied to each wheel.
The ED simulates a differential lock while the front wheels are driving straight paths.
Even in the simplest form of implementation, a controller of these characteristics presents a level of complexity quite superior to any standard controller used in a single motor drive vehicle [
8]
Several studies claim that an ED controller may require measuring the speed of each driving wheel, the current of each motor and/or the steering angle [
9]. Some sensors can be eliminated to gain simplicity at the expense of reducing features. A controller without wheel speed sensors is proposed in Reference [
10] and another controller without a steering angle sensor nor speed sensors is proposed in Reference [
11]. Both designs are applied to EVs driven with induction motors. This allows the obtaining of the advantages of higher reliability, low price and a broad range of products and suppliers [
12].
2. Materials and Methods
A very small weight control system has been developed, based on a microcontroller platform implemented in a three-wheeled LEV with two independent BLDC motors s placed on the two rear units. This Control Processig Unit (CPU) can regulate the input power of these units and sense all the variables introduced in the previous chapter. The selected processor can implement complex functions such as traction control and anti-lock wheel procedures.
Three different variable measurement systems have been integrated in different implementations developed to compare complexity and behaviours for managing an optimized ED:
Current being applied to each motor. The torque delivered by each motor is estimated as it is proportional to its input current that is read using shunt resistors and analog/digital converters in the CPU (Analog sensors, 4.7 kohms shunt resistor and bidirectional current sense amplifier INA 283 by Texas Instruments, Dallas, TX, USA)
Hall-effect sensors. This type allows the calculation of the rotation speed of the wheels without using a dedicated speed sensor (Analog sensors. Model SS49E by Honeywell, Charlotte, NC, USA).
Position sensors to measure the steering angle of each driving wheel (Analog sensors. ISC3004 by Phidgets, Calgary, Alberta, Canada)
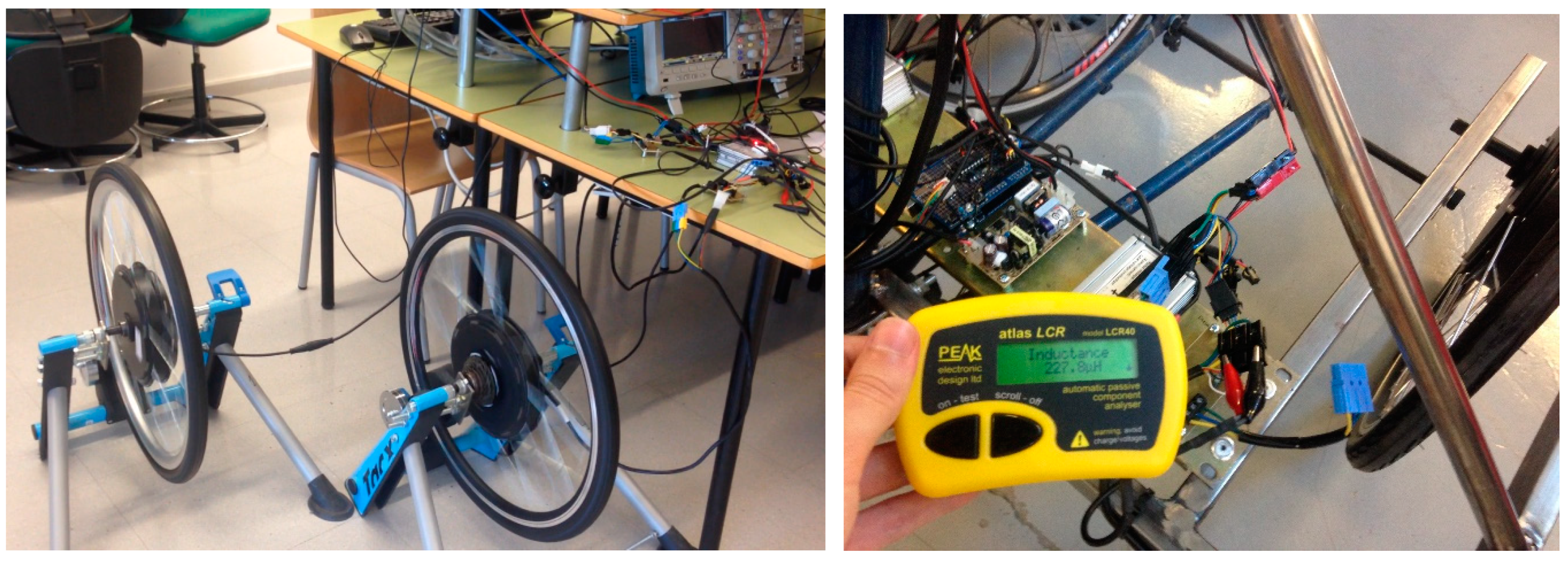
2.1. Experimental Procedure
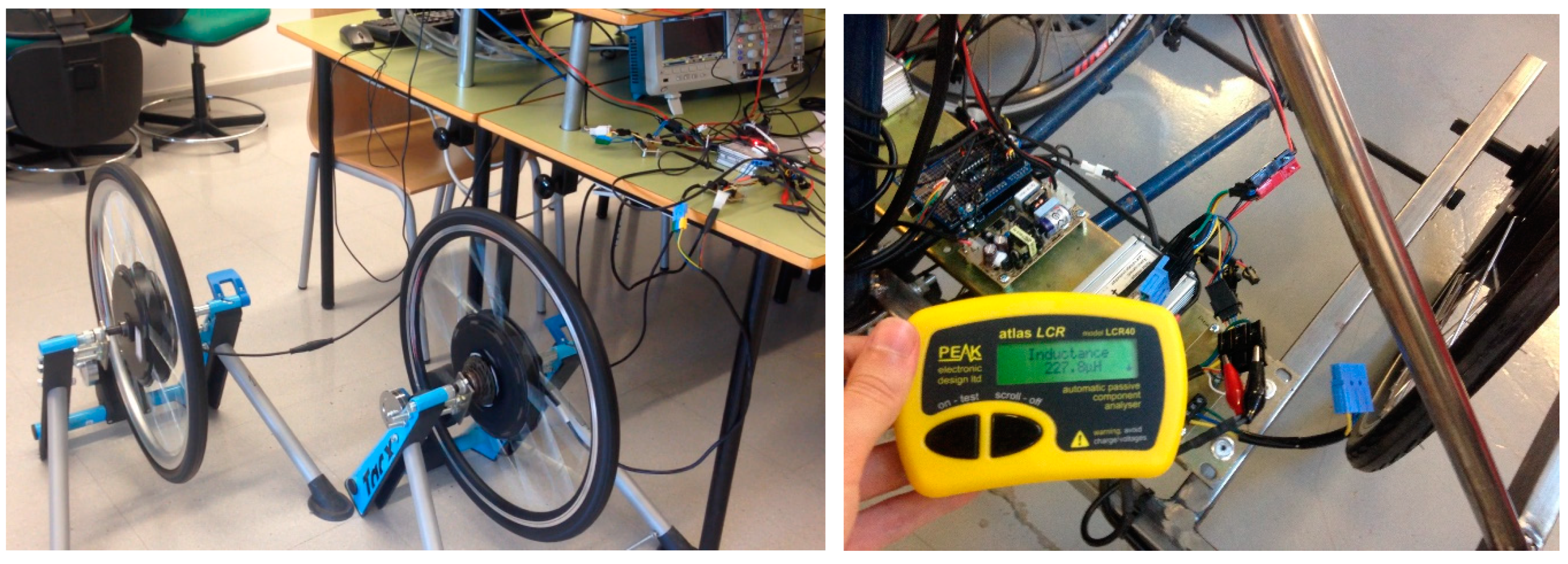
A laboratory test bench was developed, as presented in
Figure 1, to generate the basic architecture of the control system and to program and test the algorithms of the microcontroller to efficiently manage the control of the two driving wheels in a synchronized pattern. Different mechanical resistances applied to each wheel allow the simulation of different trace driving conditions. These tests characterize the behaviour curves of the specific model of motor used in detail, measuring experimentally all the fundamental parameters of its components as the inductance of their coils.
Afterwards, a test vehicle was driven with two independent brushless DC motors installed in the same axis of the vehicle and directly coupled to the two driving wheels.
The vehicle was constructed over a common bicycle chassis integrating a rear platform to set two driving wheels installing motors that have identical characteristics. The electronic differential and its control architecture are placed along that added platform and the vehicle power battery is placed in the main original frame of the bike. A general top view of the LEV is presented in
Figure 2.
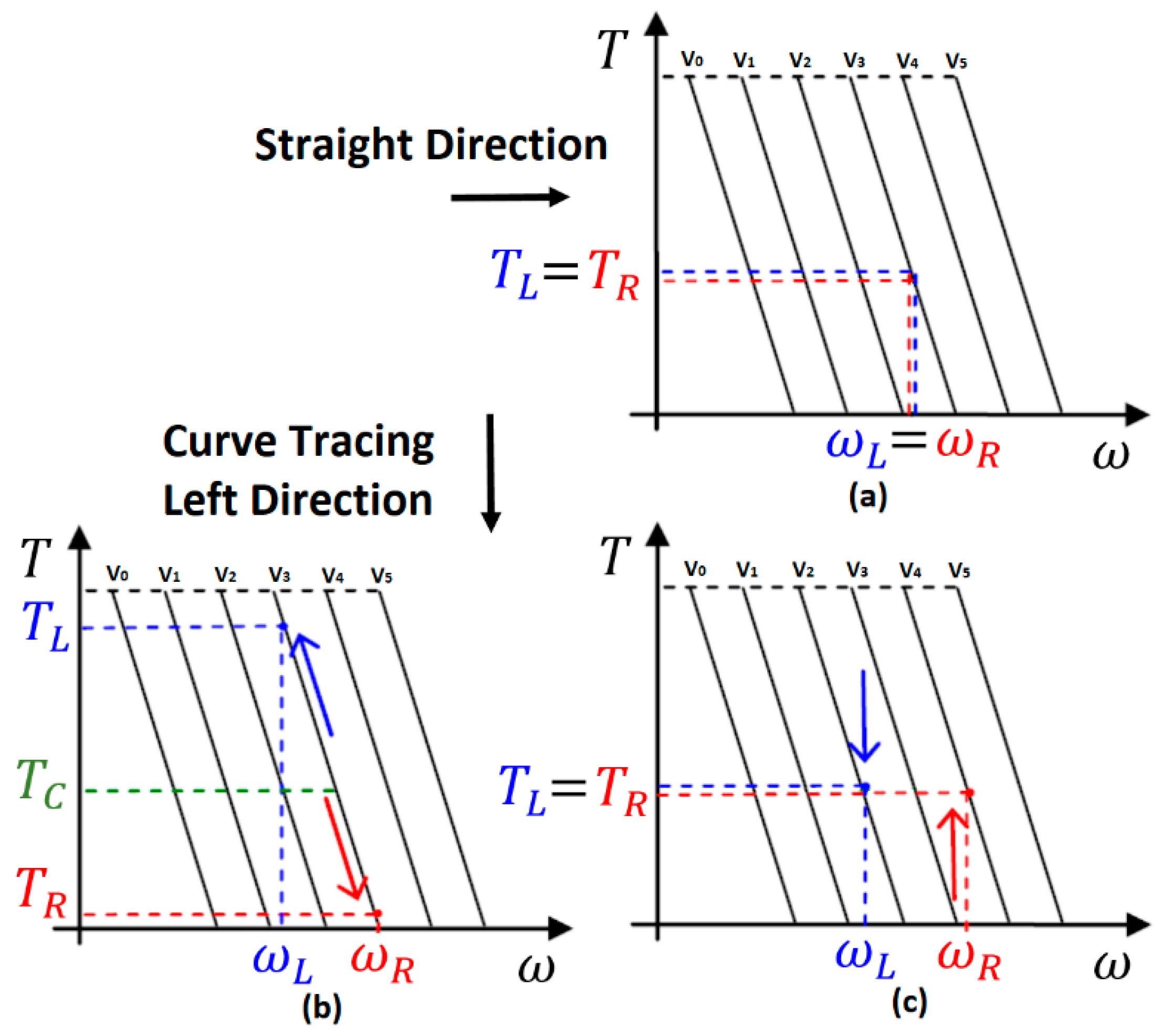
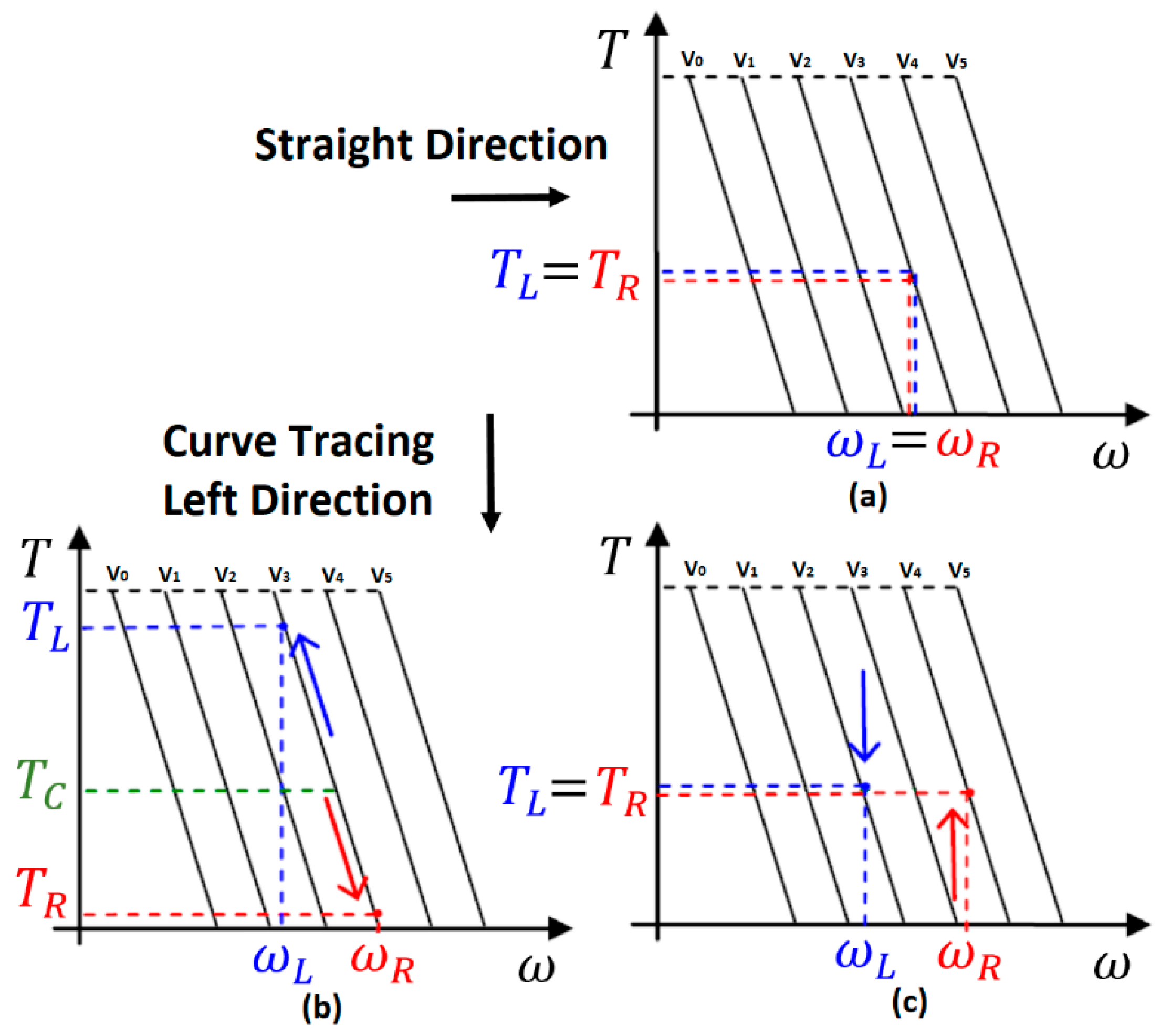
The configuration implemented allows the two motors to rotate at different speeds when the vehicle traces a curve. Thus:
When driving straight forward, the two motors of the power train (with an equal applied voltage or equivalent duty cycle of the control signal) deliver the same torque, set by the accelerator of the vehicle, rotating their wheels at equal speed and no differential control is executed. The operating point of the two motors when the vehicle is traveling at a specific speed is represented in
Figure 3a.
When the steering system starts forcing the vehicle to trace a curve, the torque of each motor is modified from the previous set up of control (Tc) to allow each wheel to turn at a different speed under the existing power input. See
Figure 3b.
When this situation is detected, the input power of each motor is modified by the ED to allow each wheel to spin at a different speed with an equal torque of each motor. The control system reduces the input of the inner wheel motor and increases that of the outer one until the torque delivered corresponding to that required by the accelerator (Tc) as in
Figure 3c. In this new state, the conditions of the motors are adequate to trace the curve correctly.
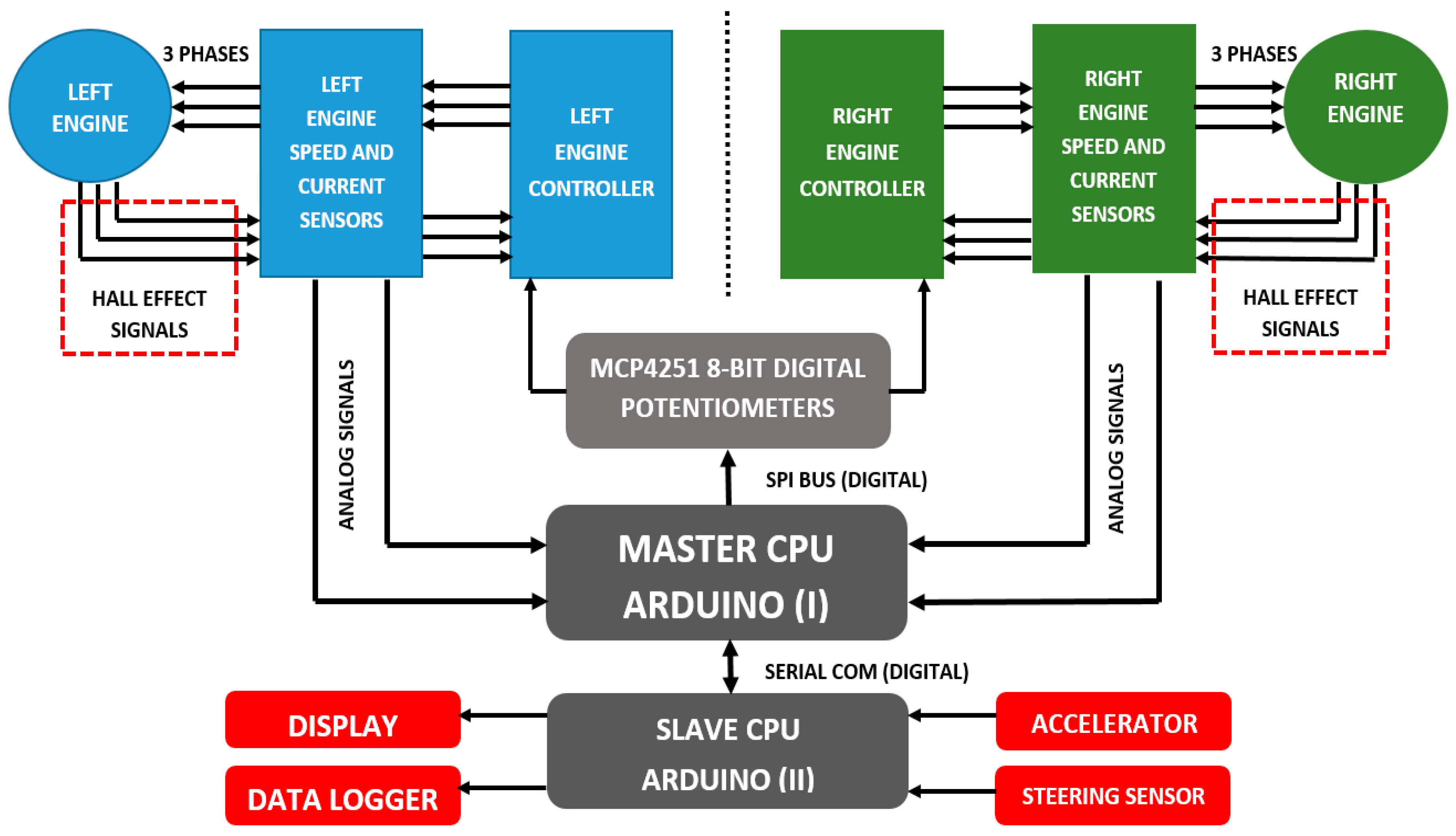
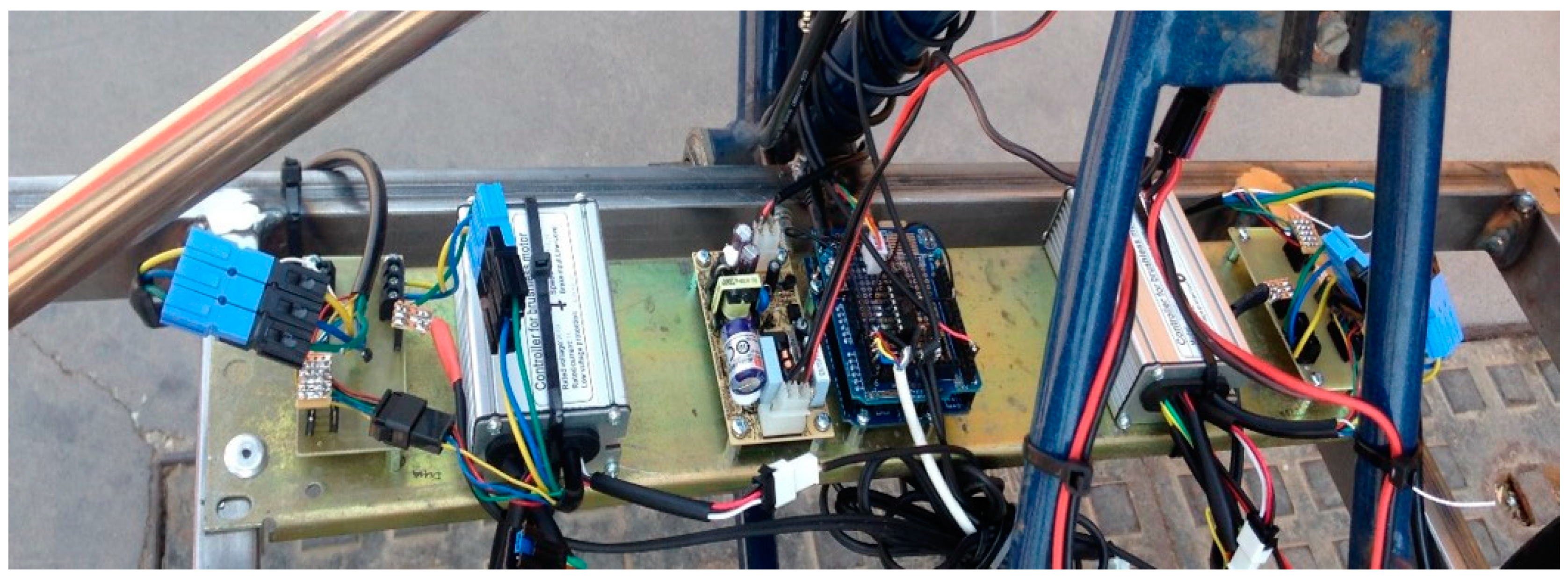
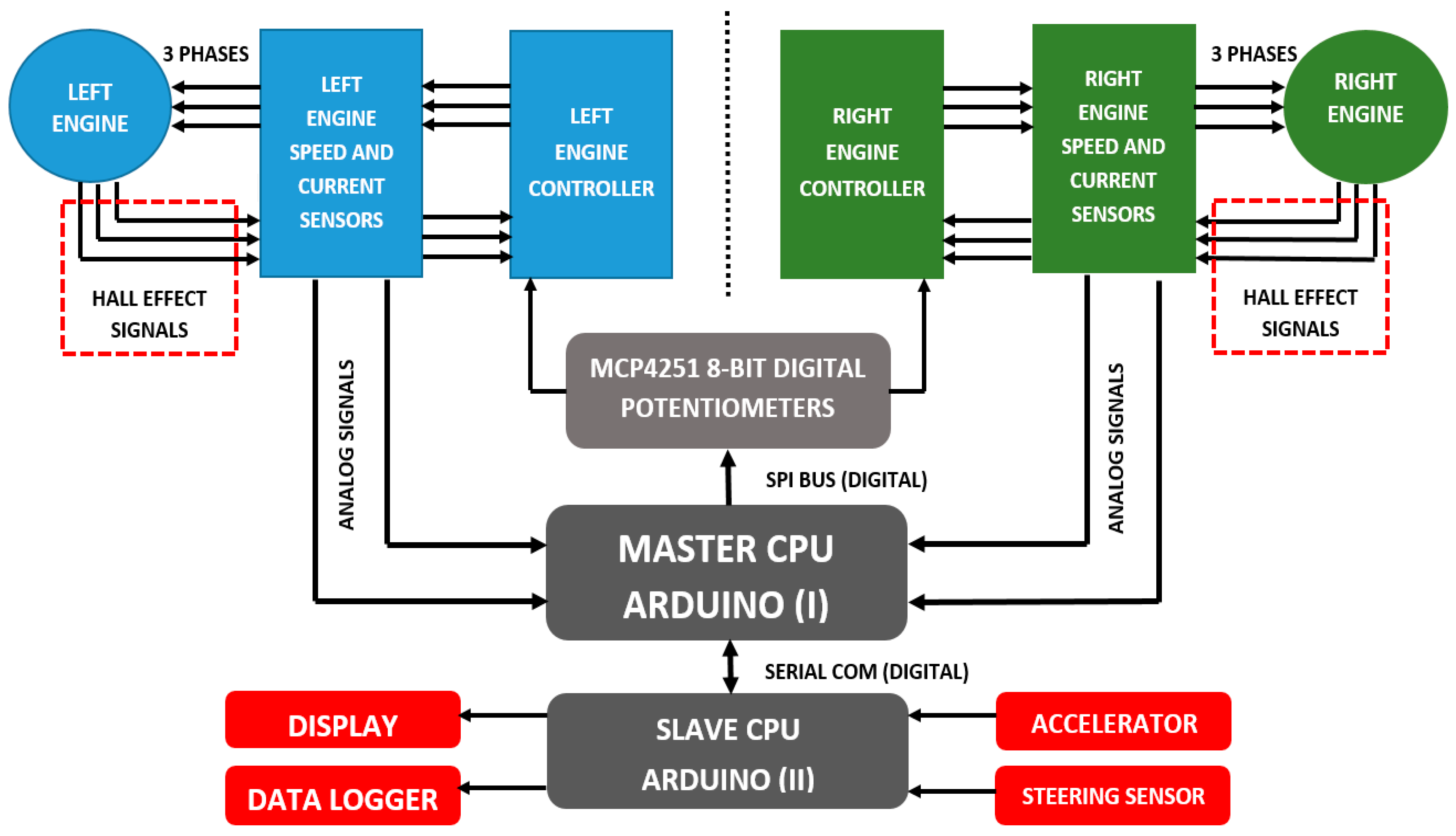
The final architecture of the ED developed, based on two (master/slave) open-source electronics platform Arduino One SMD R3 boards, is presented in
Figure 4 (schematic) and
Figure 5 (physical hardware implementation). These diagrams and pictures include all the basic elements described in the literature [
13,
14] along with all the sensors listed in the previous chapter. An exhaustive evaluation test is proposed including different paths driven at low and high speeds that generate different slipping conditions in the drive train wheels due to the concentration of excessive torque either in the left or right wheels.
2.2. Traction Control
The control of traction in one of the main variables in the optimization of the mode of operation of an LEV. This is one of the main causes of energy losses. The objective of the ED, in this case, is to detect if the slippage of any of the wheels occurs and act over it to avoid skidding or loss of traction, decreasing the torque exerted on the referenced motors [
15].
In a moving vehicle that is tracing a curve to the right of radius ‘
R’ and angle ‘
θ’ (in degrees) the distance travelled by each wheel in that curve (‘
X’) is as described in Equations (1) and (2) (using the subscript ‘
L’ to refer to the wheel on the left and ‘
R’ for the unit placed on the right) being ‘
d’ the distance between both rear driving wheels:
The linear speed of each wheel will be given by the quotient between the space travelled and the time used for it, which is the same as there is a common axis. We can gather the terms that do not depend on whether it is the inner or outer wheel in a factor ‘
k’, leaving us the following expressions of the lineal speed:
Relating these two equations we obtain:
If the speed of the left wheel exceeds that value with respect to the right, it means that it is sliding and therefore it will be necessary to reduce the torque input from the main CPU of the ED.
An angular position sensor that measures the rotation of the handlebar of the tricycle can provide this information. This sensor must be placed in the front wheel and the slave CPU will take the obligation of harvesting the data out of it. It is a delicate sensor, that needs to be properly calibrated and the vibrations or a shock in the vehicle may generate wrong data that generates malfunctions [
16].
In the case of eliminating its presence, it will not be possible to know exactly the radius of the curve the vehicle is taking at any moment or which side it is turning on.
However, we can estimate this information relating the speed of both rear wheels with the front one (in this case a single wheel, if it were a four-wheel vehicle, we would compare with the two that do not deal with traction) [
17].
The maximum speed that the rear wheels can reach depending on the values of the front element is:
This value is maximized by the minimum turning radius that the front wheel can face.
Since it is known that the separation distance of the rear driving wheels (‘d’) and the speed of the front wheel can be known by means of a sensor of the same type as those used for the rear ones. If we measure the minimum radius of rotation experimentally, we will obtain the maximum speed value that can reach either of the rear wheels with respect to the front one without making the wheels slide. It can be estimated that, if any of the wheels exceeds this marked value at some point, it means that it has lost grip and is sliding in some value, which will proceed to reduce the torque awarded to this traction element.
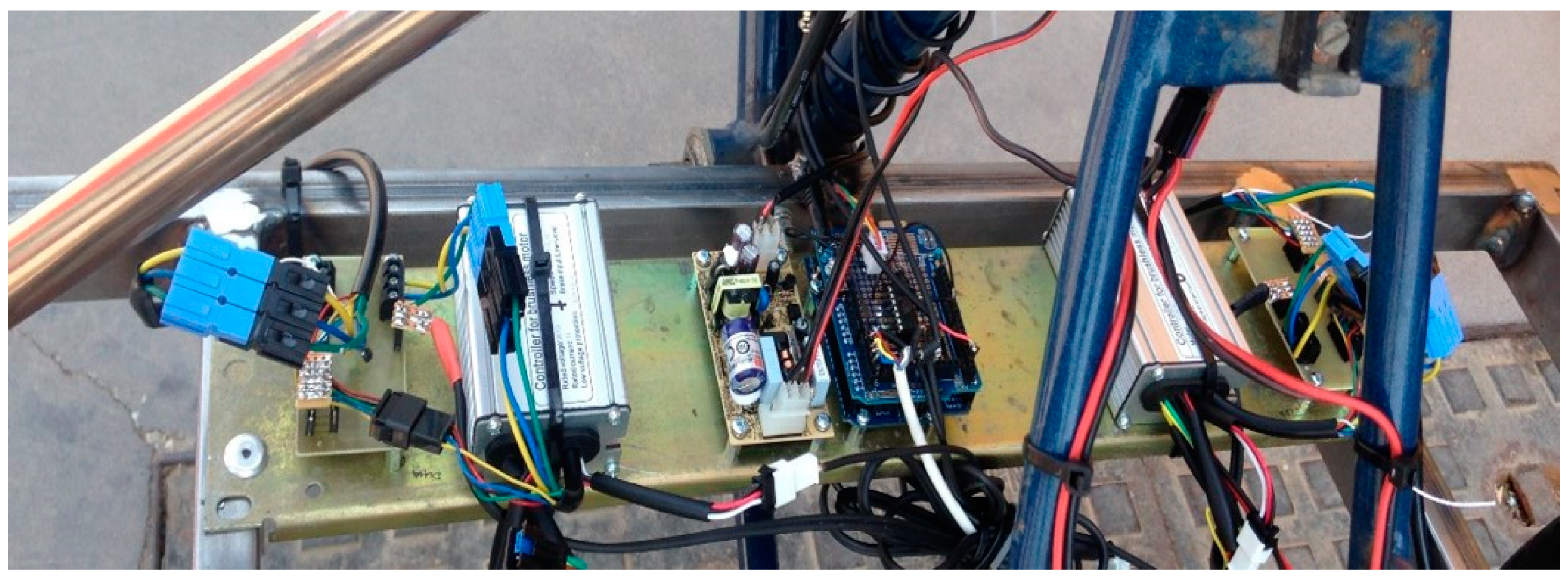
The separation of the front and rear wheels implies a distributed development where digital, analog and power lines coexist with a significant length of wires in all the cases. The digital cables interconnect the two main CPUs of the ED using a digital serial communication (0–5 V) with an ad-hoc protocol with sequence control and checksum bytes to ensure the robustness of the transmission process. The information obtained from the sensors placed in the vehicle is done under analog performance. To ensure the robustness is the most relevant difficulty of implementation as the existing ElectroMagnetic Interferences (EMI) generated by the two motors is significant. This is the main reason why the sensors that are placed on the front wheel are managed by the display CPU, placed in the handle bar, to minimize the length of the cables and their proximity to the power wheels.
3. Results
As declared previously, the vehicle has been subjected to two different test scenarios. These two circuits generated were:
In these two cases, the tests were recorded in video (several frames are displayed in
Figure 6 and all the data related to the trajectory described by the vehicle and the inrush currents and speed information from the two BLCD electric motors has been collected using a PC).
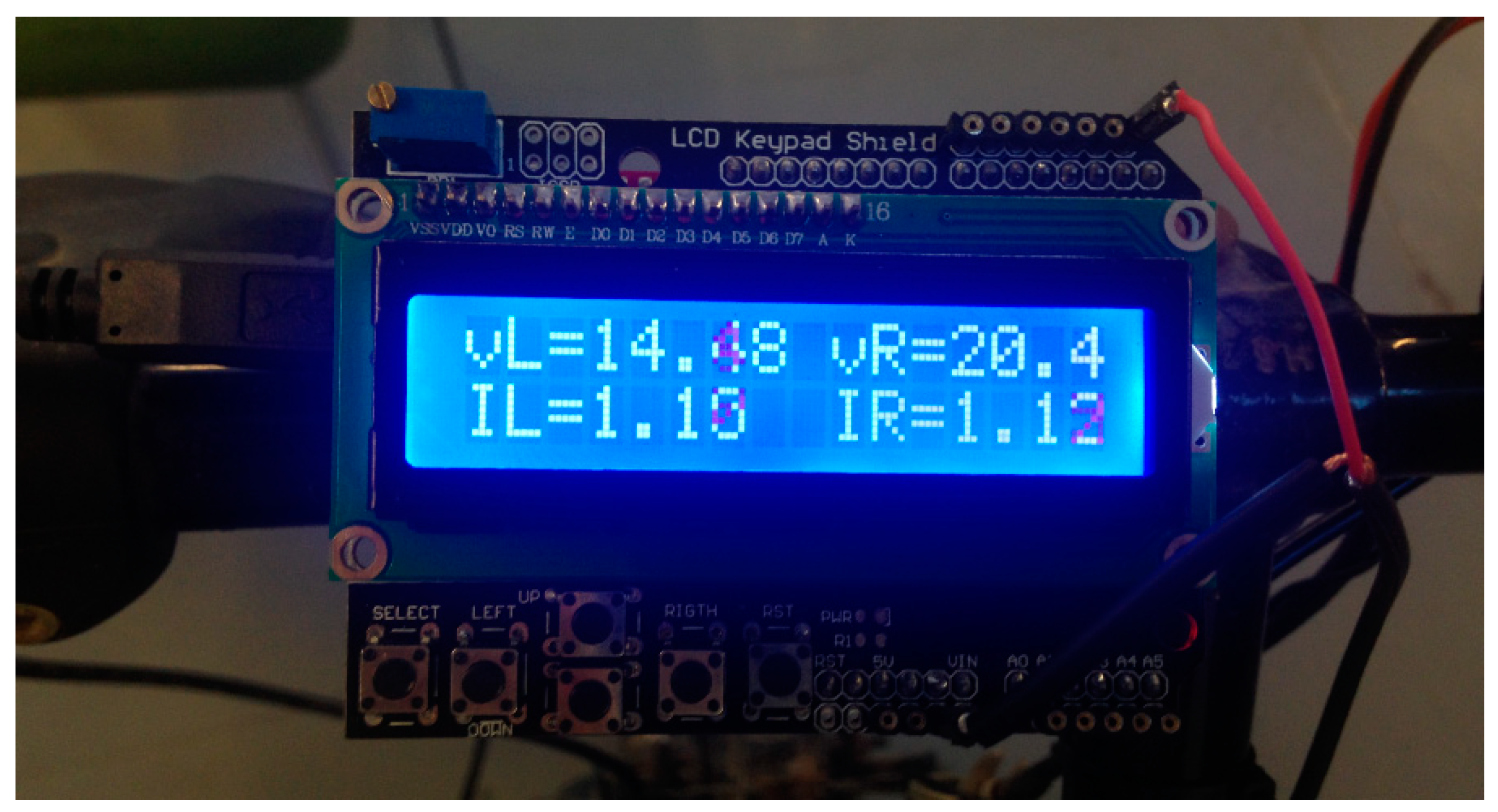
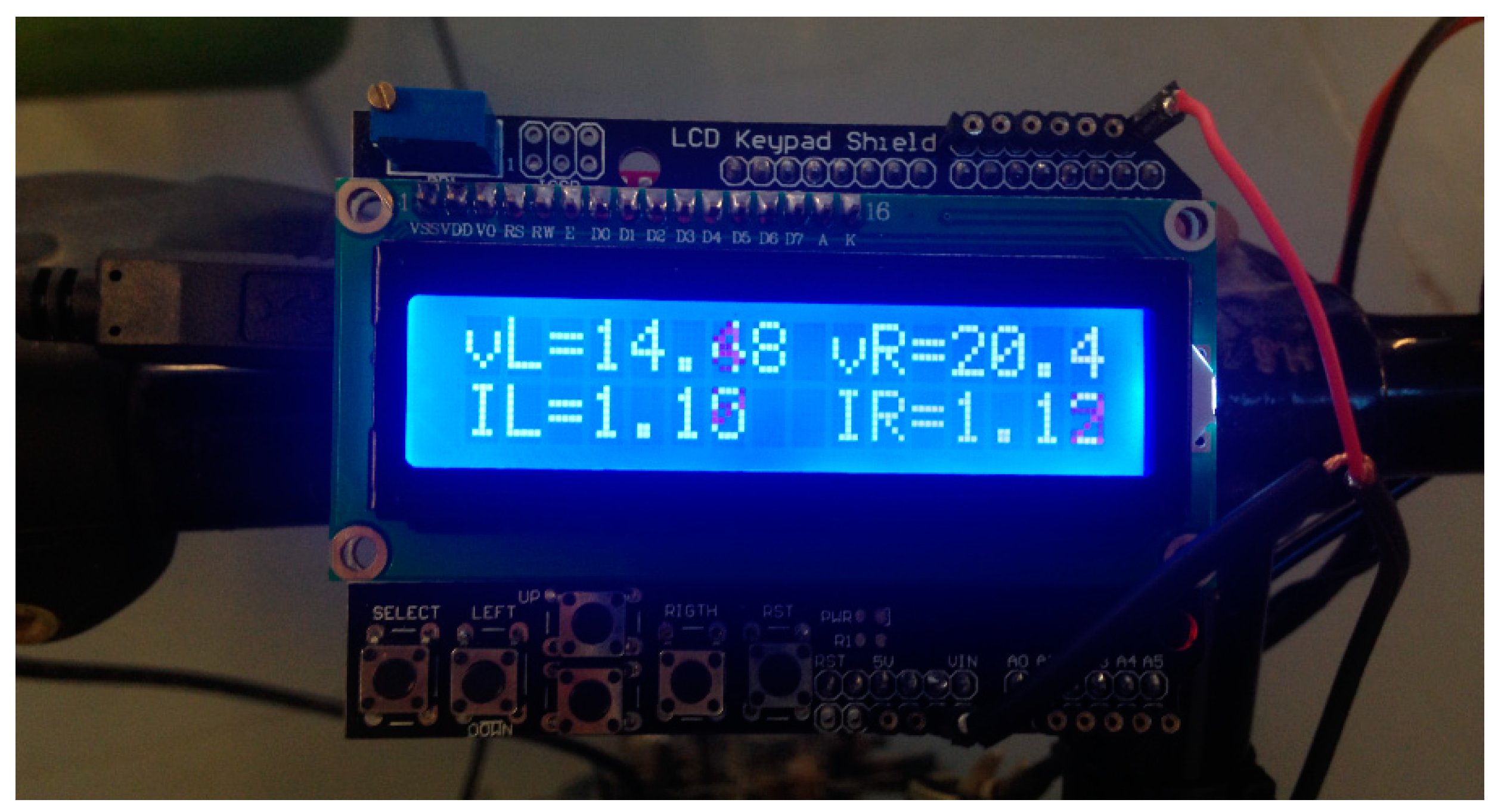
Instant information on the working aspects of the ED can be observed while driving by the operator observing a LCD screen placed on the handlebar of the tricycle (controlled by the secondary CPU of the ED) and can adjust the trace and speed according to this information while performing a test or using the vehicle normally.
Figure 7 presents the display systems generated and the information provided to the driver.
4. Discussion
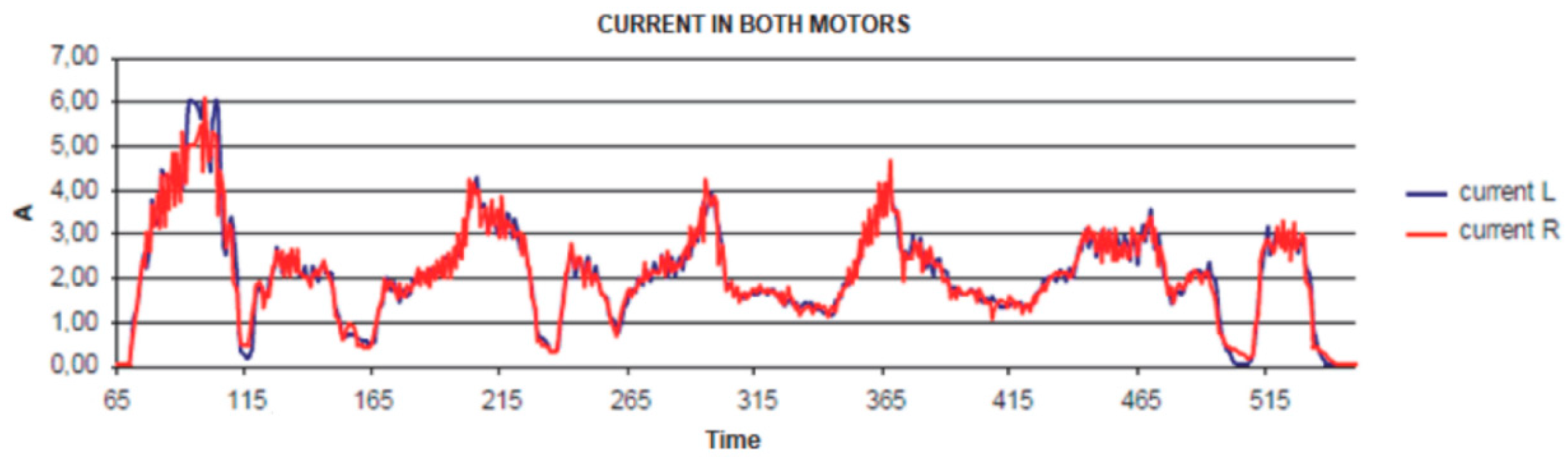
The simplest ED control system depends on sensing only the variation of torque delivered to each wheel. In this case, the CPU reduces the duty cycle of the control signal of the inner wheel motor and increase that of the outer wheel until the torque delivered by both motor returns to be equal to the set point set by the accelerator and the speed of the motors is adequate to trace the curve correctly.
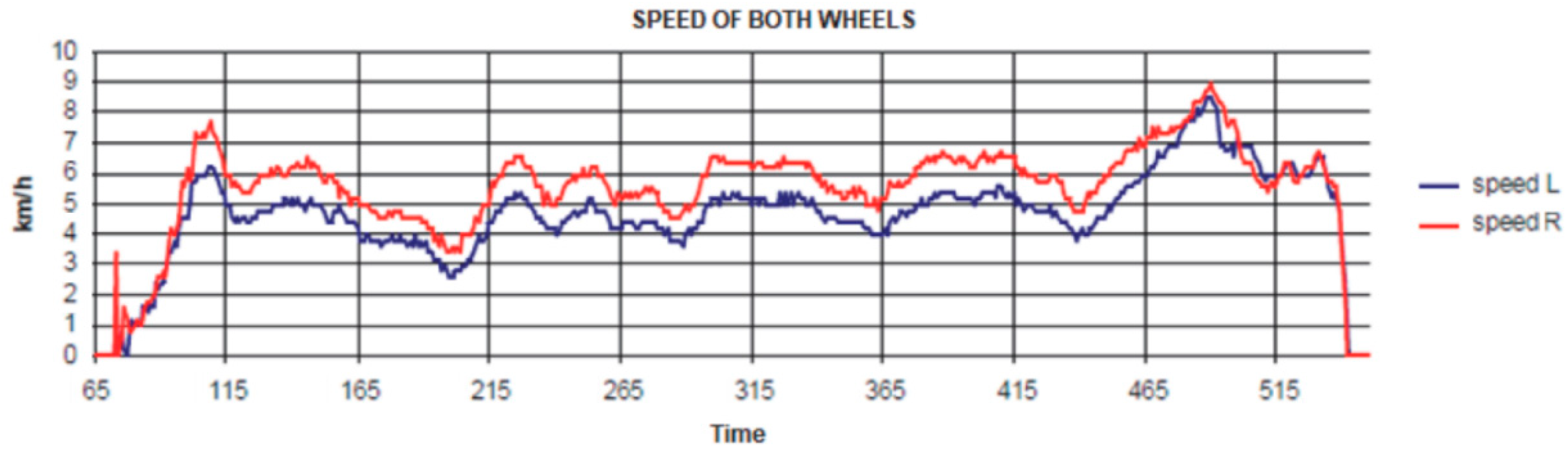
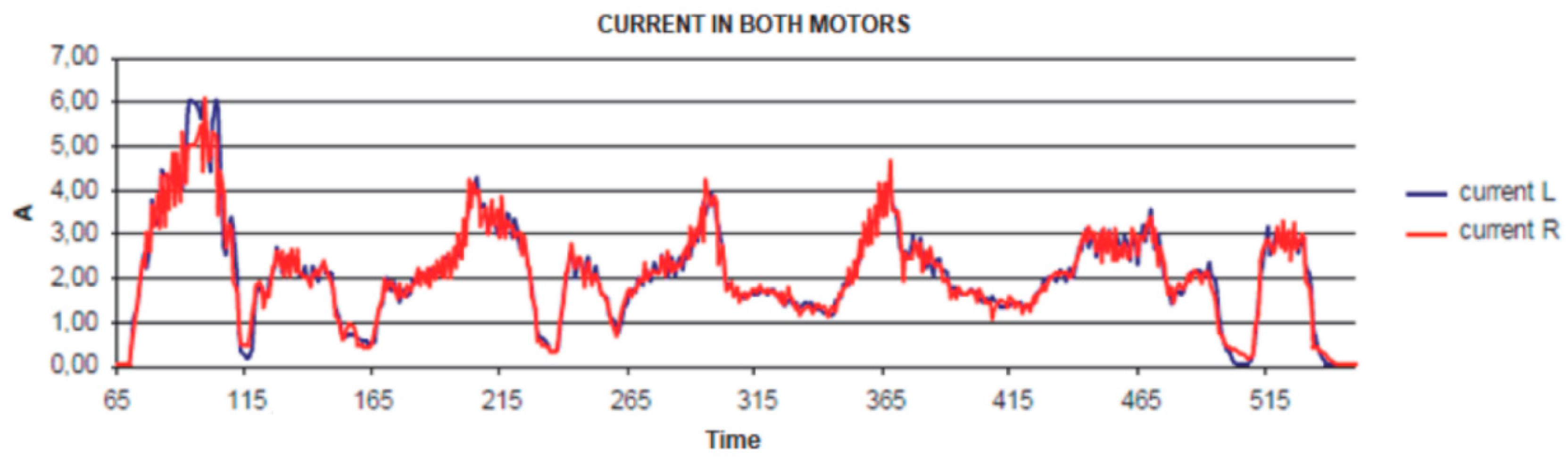
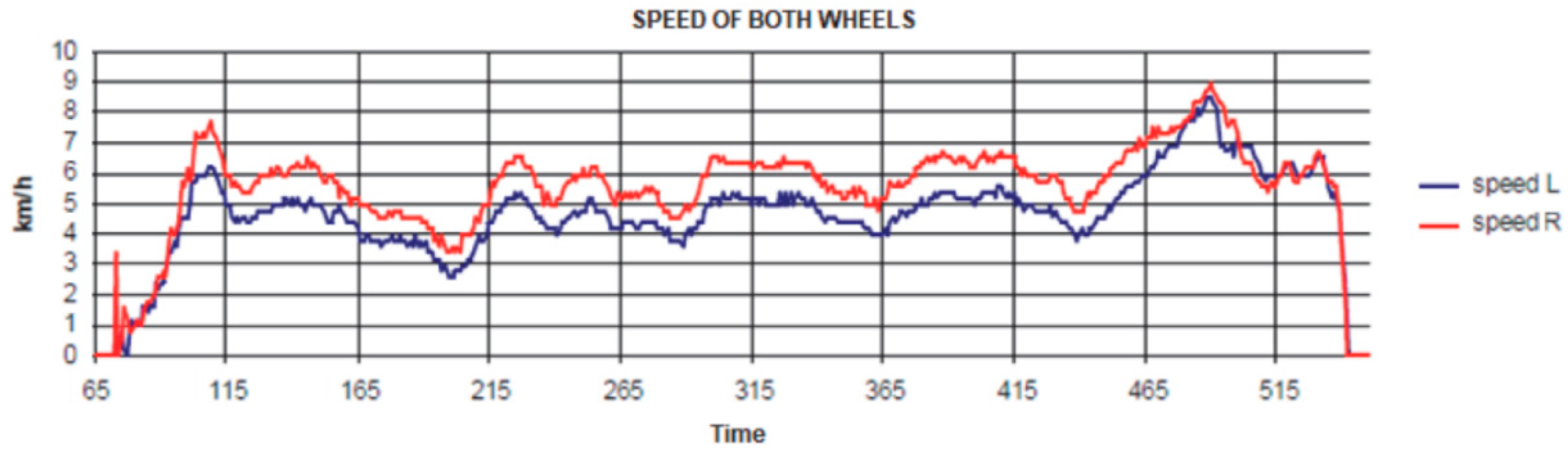
When the trajectory of the vehicle becomes a curve, the inner wheel speed (the left wheel in this case) is lower than the outer one (the right one). On the other hand, the current signal remains practically identical for both motors, which means that the torque applied is the same. It has also been compared to the theoretical speed ratio between both wheels to the experimental value, obtaining an error of 2.03%. This error is within the expected range, due to the difficulty of maintaining an exact radius during the entire trajectory by the driver.
At low speed (<10 Km/h approx.), and even in sharp curves (not full circles), when there is no slipping on any of the wheels, this basic ED architecture works properly and in a smooth way.
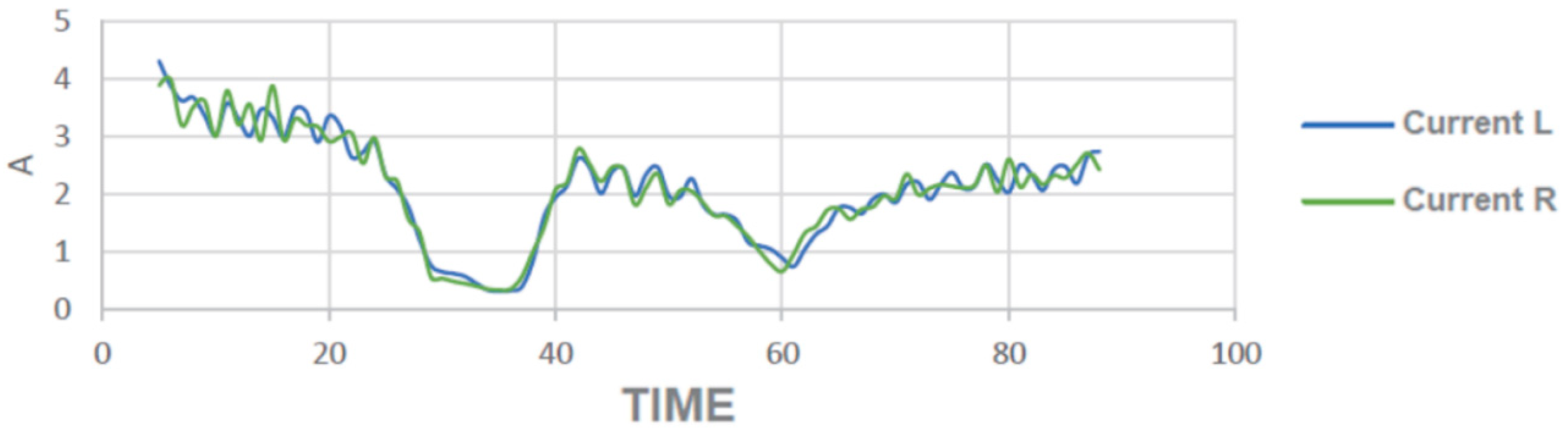
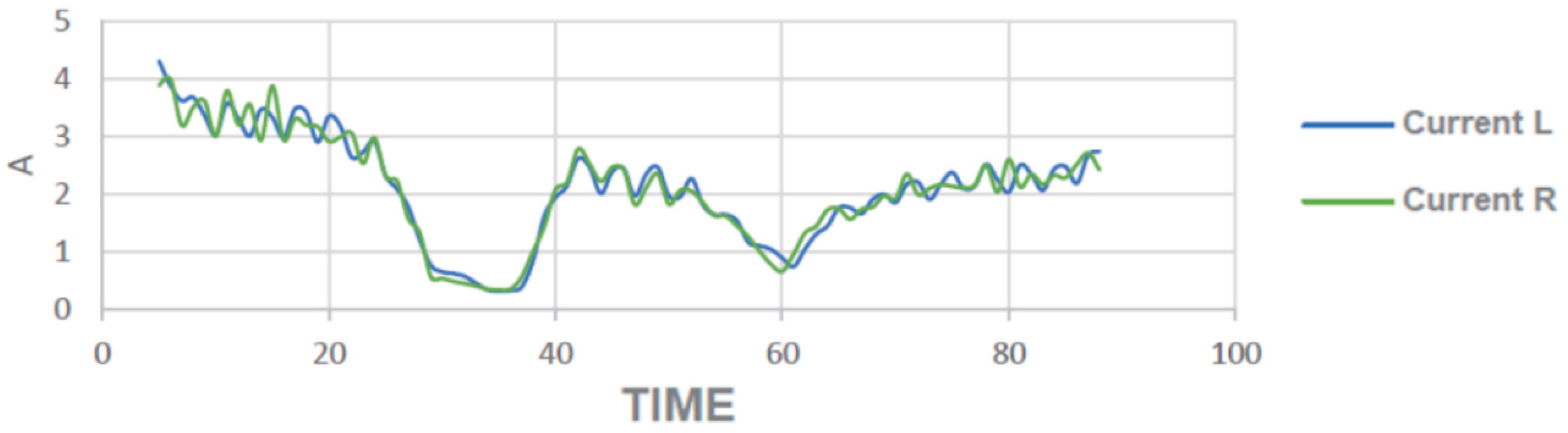
Figure 11 (full sensing) has current curves smoother than basic sensing, as presented in
Figure 8, but the driving conditions found are similar. However, in all cases where the speed of the driving wheels is not sensed, abnormal situations, such as blocking or slipping of a wheel due to higher speeds or extremely sharp turns, cannot be detected in advance and, consequently, not solved properly, when at least one of these errors arise.
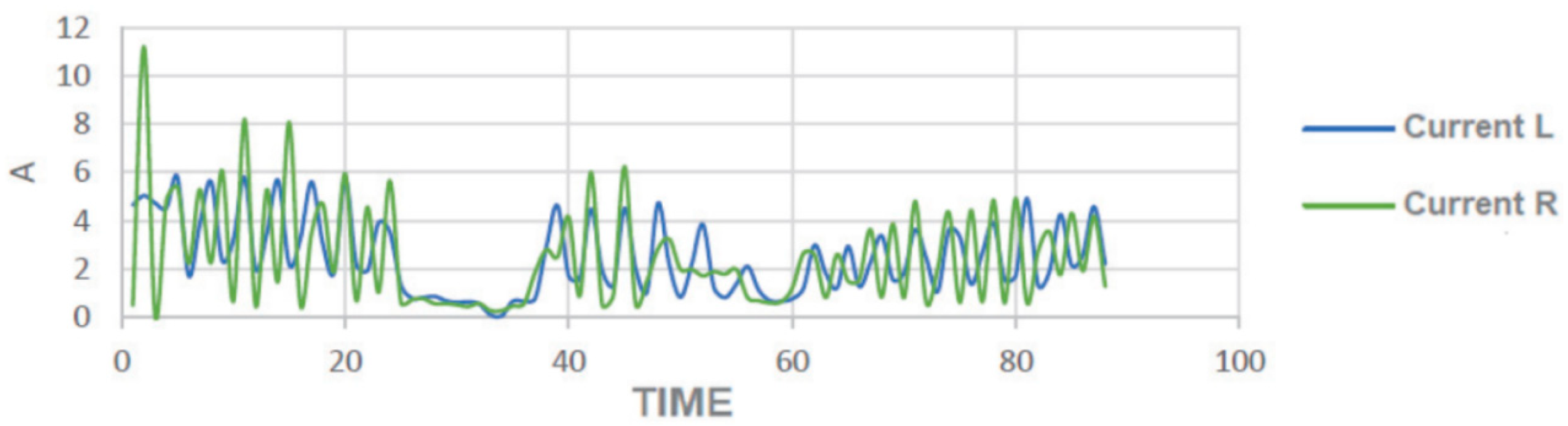
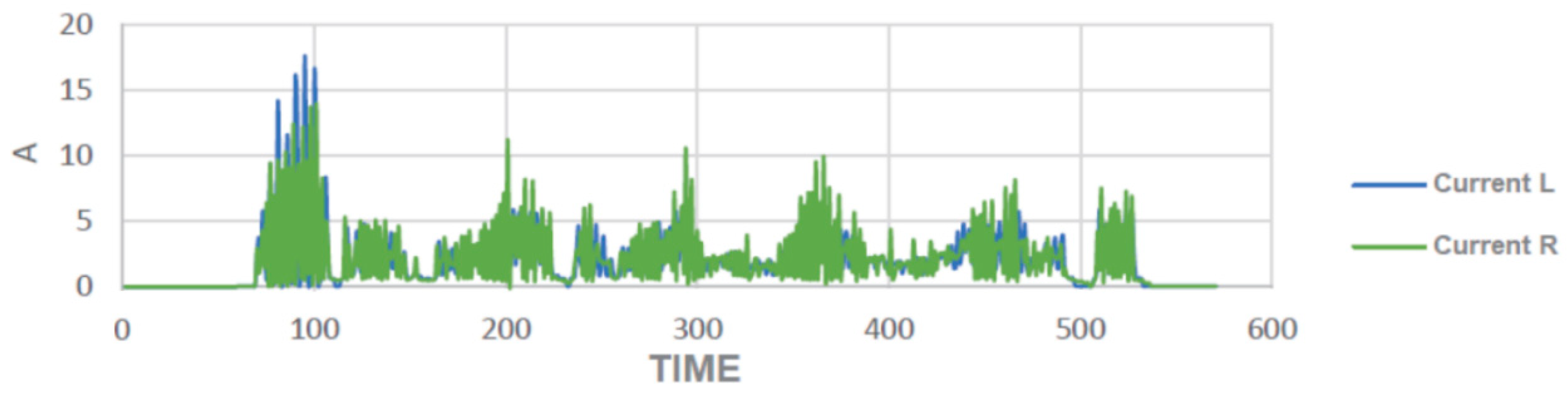
Figure 9 (lineal speed of 15 Km/h with only torque information) shows how the currents’ values are changing rapidly and continuously as the ED is unable to interpret the real-time driving conditions. This may result in an energy loss up to 40% due to the lack of traction and, in severe cases, may generate an extreme loss of stability that can conduct to a turnover of the vehicle.
Considering the use of the vehicle completing a trace of a complete circle, the experimental results obtained, with the vehicle driving without a position sensor to measure the steering angle in the driving wheel, express that for medium/low speed values (<15 Km/h) in the LEVs and not sharp turns this approach is good enough and the complexity and difficulties of having additional sensors do not offer any significant advantage over having them included in the system.
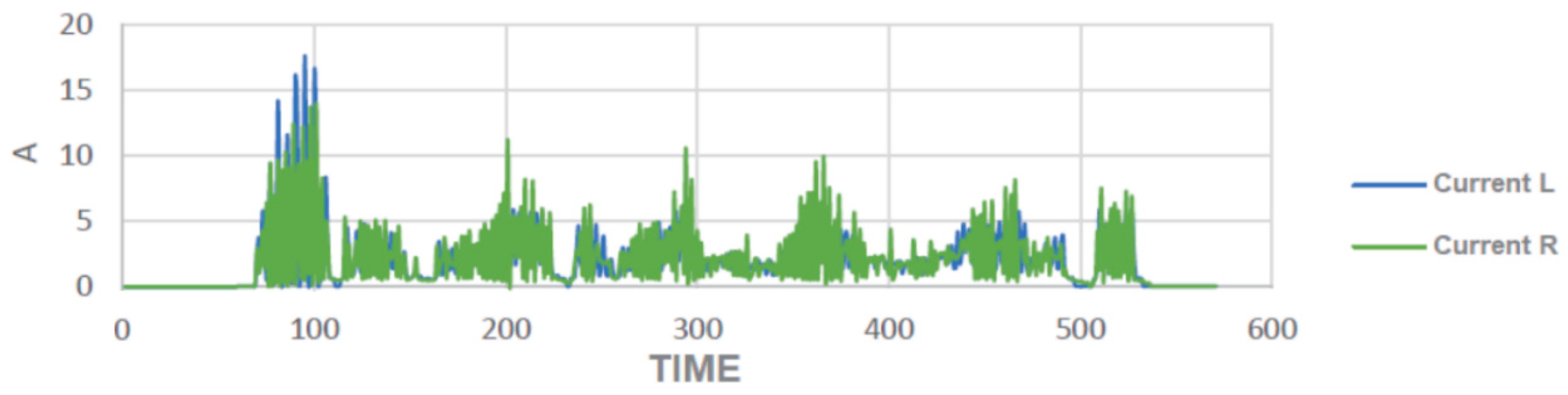
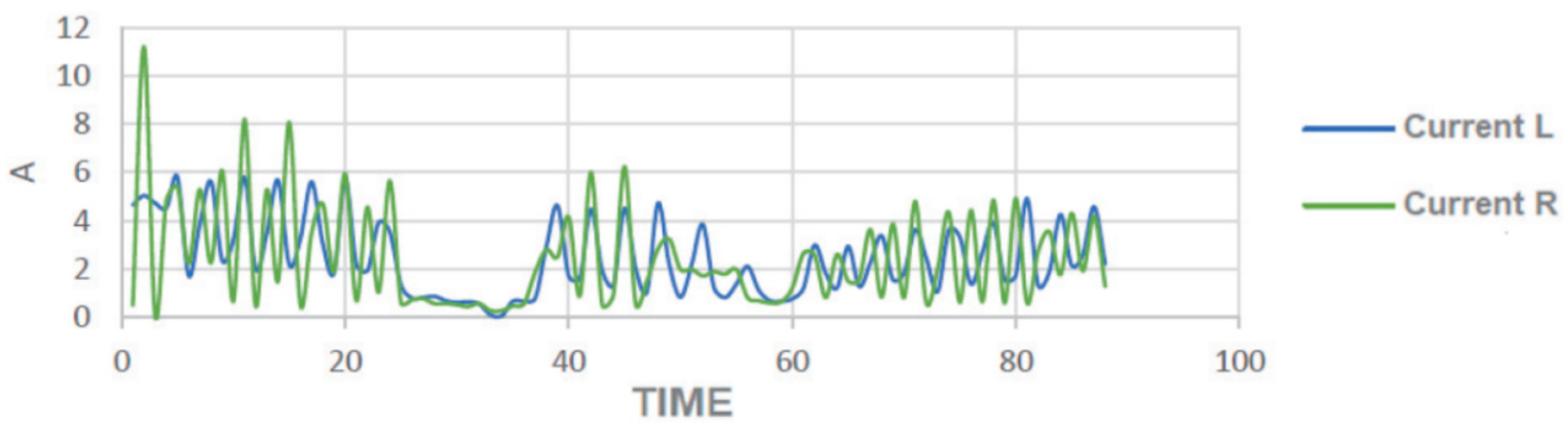
However, it is observed that, at higher speeds, the appearance of slips on the wheels generates a problem in the ED system to properly adjust the power to be driven on the motors that causes several oscillating inrush peaks of currents, as presented in
Figure 10. This effect/consequence can be anticipated with this steering sensor and the system, in this case as in
Figure 11, the ED control is able to adjust the speeds of the wheels before it occurs, providing smoother driving control with fewer energetic losses.
To be able to obtain reliable information on the steering angle and lineal speed of the front wheel, shielded cables are needed (connecting the metallic cover to the ground (GND) of the batteries). This is observed even though the shortest distance between these wires and the two BLDC motors of the LEV were bigger than 1 m. Without the shield, punctual errors up to 70% of the existing magnitude controlled found on the vehicle.
5. Conclusions
In the face of the growing environmental revolution of the development of LEVs, new products are being developed that advance the field of clean energy transportation. The installation of ED units in electric vehicles lead to the compliance of one of the basic requirements of this segment of vehicles with more than one drive wheel. This means to ensure that the two motors of the power train deliver the same torque and can rotate at different speeds, with a significant reduction in weight, guaranteeing lower consumption and a better use of their basic resources.
In this work, we discuss the advantages and disadvantages of adding hardware complexity to an ED system by including steering angle sensors or dedicated speed sensors upon a basic differential torque feedback where this parameter is estimated measuring the current injected to the motors based on their proportional relationship.
We have developed a mathematical model to predict the appearance of slippage in a two back driving wheel LEV and several control strategies based on the information available from different types of sensors. To implement them, a small weight and low cost hardware system has been developed based on two Arduinos ONE SMD R3 CPUs is used to coordinate two standard BLDC motors through their controllers using the required sensors to measure the three claimed variables of the vehicle: steering angle and angular speed of the wheels and torque injection.
Two basic evaluation circuits (slalom and circular routes) have been used to test and evaluate these models, driving the LEV designed at different speeds achieving or not slippage conditions of the drive train wheels.
The results obtained, as presented in the Discussion chapter, indicate that if the LEV is driven at low/medium (≤10 km/h) speed with non-sharp turning the increment in sensor complexity (from a basis torque estimation) offers no significant slipping prediction benefits to achieve non-slippery conditions. However, if speed increases or turns gets too sharp (as driving in circles), the driving conditions can be better inferred in advance, based on additional sensing and a better reduction of slippage can be achieved. At this point, this effect cannot be easily eliminated but it is possible to minimize it by adapting the acceleration of the vehicle and the torque distribution in the wheels.
From the hardware dimension of the system, the main drawback of adding steering angle and speed sensing is that it requires a significant improvement of the immunity to the electric noise of the circuits and the wiring of the sensors. Noisy signals caused by the EMI generated in the electric motors s may generate more inefficiencies than advantages due to a bad interpretation of the specific driving conditions. A clean set of measurement signals allows easy calibration of the proportional, derivative or integral gains of the control algorithm that generates the input currents of the motors.
The optimization of the ED control unit is being developed through the generation of an active configuration procedure of the PDI gain values to be modified within a setting map while driving according to the needs of the route or the driving mode: faster response and lower energy consumption.
Author Contributions
A.G.-C. and L.C.-O. carried out the manuscript preparation and developed the firmware for the control units. A.G.-C. and J.F.-R. performed the manufacturing of the vehicle and the electronic hardware test. J.R.A.-D. contributed to the entire manuscript through critical revision and by improving the introduction, discussion, conclusions, and reference sections. All the authors participated developing the tests to evaluate and adjust the performance of the architecture.
Funding
This research was funded by the Universidad de Málaga and the Campus de Excelencia Andalucía Tech under the call for proposals 2017-19: Innovative Education Projects. Grant number: PIE 17-120
Acknowledgments
The authors would like to express their sincere gratitude to for the administrative and technical support given to this research.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Hofman, I.; Sergeant, P.; Van den Bossche, A. Drivetrain design for an ultra light electric vehicle with high efficiency. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 18–20 November 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Folsom, T.C.; Cotter, R. Automation of ultra-light vehicles. In Proceedings of the 2017 IEEE Conference on Technologies for Sustainability (SusTech), Phoenix, AZ, USA, 12–14 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid. Electric, and Fuel Cell Vehicles, 3rd ed.; CRC Press: Boca Ratón, FL, USA, 2018; pp. 95–98. [Google Scholar]
- Bhuiyan, M.F.; Uddin, M.R.; Tasneem, Z.; Salim, K.M. Feasibility study of a partially solar powered electrical tricycle in ambient condition of bangladesh. In Proceedings of the 2018 4th International Conference on Electrical Engineering and Information & Communication Technology (ICEEiCT), Dhaka, Bangladesh, 13–15 September 2018; pp. 495–499. [Google Scholar] [CrossRef]
- Solero, L.; Honorati, O.; Caricchi, F.; Crescimbini, F. Nonconventional three-wheel electric vehicle for urban mobility. IEEE Trans. Veh. Technol. 2001, 50, 1085–1091. [Google Scholar] [CrossRef]
- Sindha, J.; Chakraborty, B.; Chakravarty, D. Rigid body modeling of three wheel vehicle to determine the dynamic stability—A practical approach. In Proceedings of the 2015 IEEE International Transportation Electrification Conference (ITEC), Chennai, India, 27–29 August 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Grünstäudl, D.; Gragger, J.V.; Plassnegger, B.; Eibl, M.; Sandner, C.; Andessner, D.; Kocagöz, M. Design and performance analysis of a 48V electric drive system for a cargo tricycle. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017; pp. 550–555. [Google Scholar] [CrossRef]
- Paden, B.; Cáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Tabbache, B.; Kheloui, A.; Benbouzid, M.E.H. An adaptive electric differential for electric vehicles motion stabilization. IEEE Trans. Veh. Technol. 2011, 60, 104–110. [Google Scholar] [CrossRef]
- Haddoun, A.; Benbouzid, M.E.H.; Diallo, D.; Abdessemed, R.; Ghouili, J.; Srairi, K. Design and implementation of an Electric Differential for traction application. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Fernández-Ramos, J.; Aghili-Khatir, F. Electric vehicle based on standard industrial components. In Proceedings of the 2010 International Conference on Renewable Energies and Power Quality (ICREPQ10), Granada, Spain, 23–25 March 2010. [Google Scholar]
- Chau, K.T. Pure electric vehicles. In Alternative Fuels and Advanced Vehicle Technologies for Improved Environmental Performance, 1st ed.; Folkson, R., Ed.; Woodhead Publising Limited: Cambridge, UK, 2014; pp. 655–684. [Google Scholar]
- Faizrakhmanov, R.A.; Volodin, V.D.; Sharonov, A.A.; Polevshchikov, I.O. Analysis of perspective control methods of a two-engine electric drive. Rus. Electr. Eng. 2015, 86, 625–629. [Google Scholar] [CrossRef]
- Cui, S.; Han, S.; Chan, C.C. Overview of multi-machine drive systems for electric and hybrid electric vehicles. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Yin, D.; Shan, D.; Hu, J.S. A study on the control performance of electronic differential system for four-wheel drive electric vehicles. Appl. Sci. 2017, 7, 74. [Google Scholar] [CrossRef]
- Cheng, M.; Chan, C.C. General requirement of traction motor drives. In Encyclopedia of Automotive Engineering, 1st ed.; John Wiley & Sons Ltd.: Oxford, UK, 2014; pp. 1–18. [Google Scholar] [CrossRef]
- Zhai, L.; Sun, T.; Wang, J. Electronic stability control based on motor driving and braking torque distribution for a four in-wheel motor drive electric vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}