
Activation Function Dynamic Averaging as a Technique for Nonlinear 2D Data Denoising in Distributed Acoustic Sensors


 ,
,  , , and
, , and
Abstract
:1. Introduction
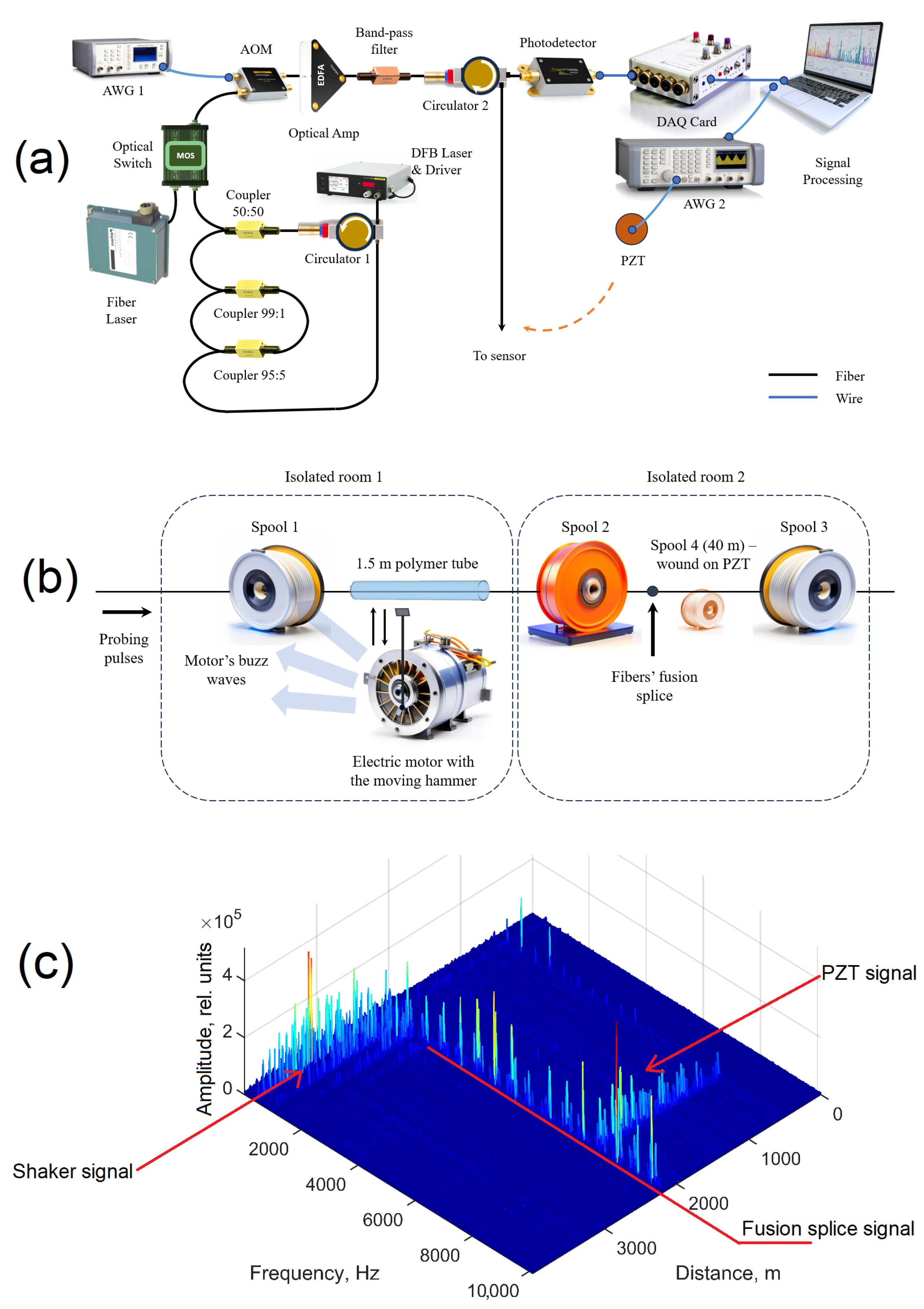
2. Setup and Methods
2.1. Moving Averaging–Moving Differential
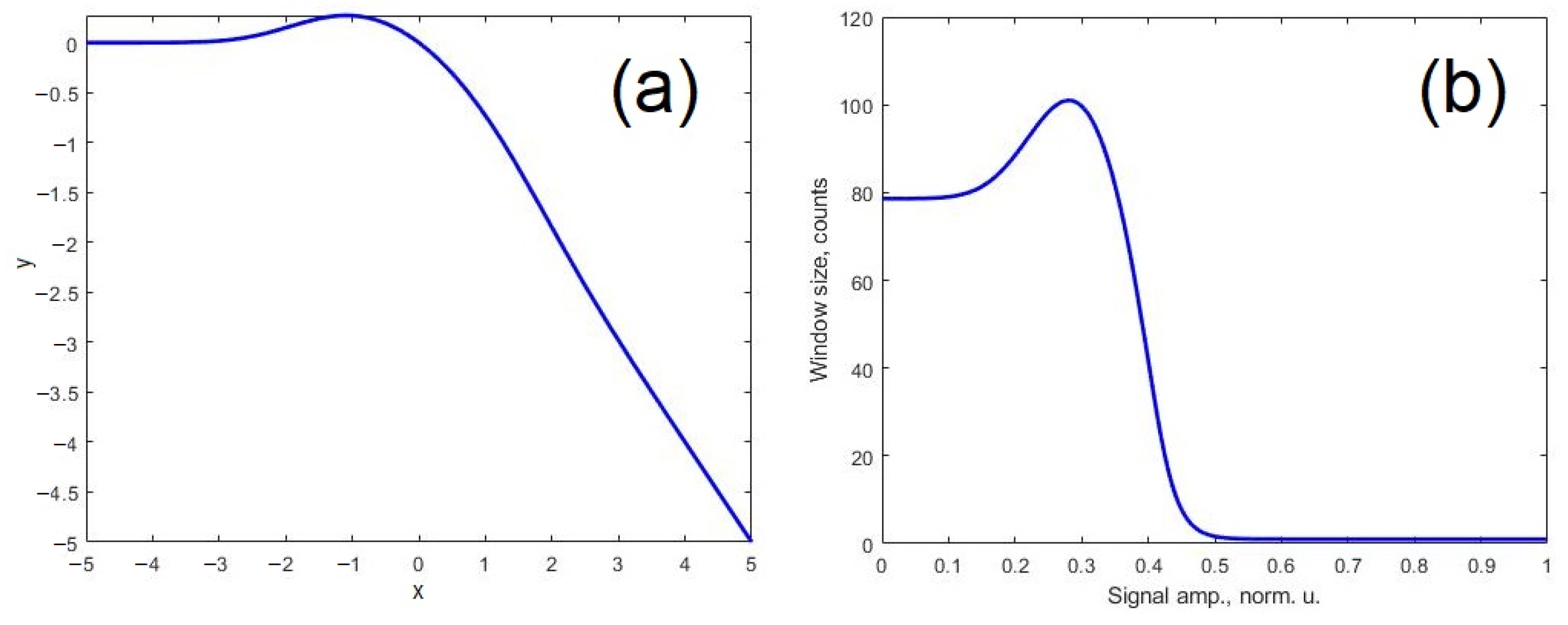
2.2. FDDA Refinement
- (1)
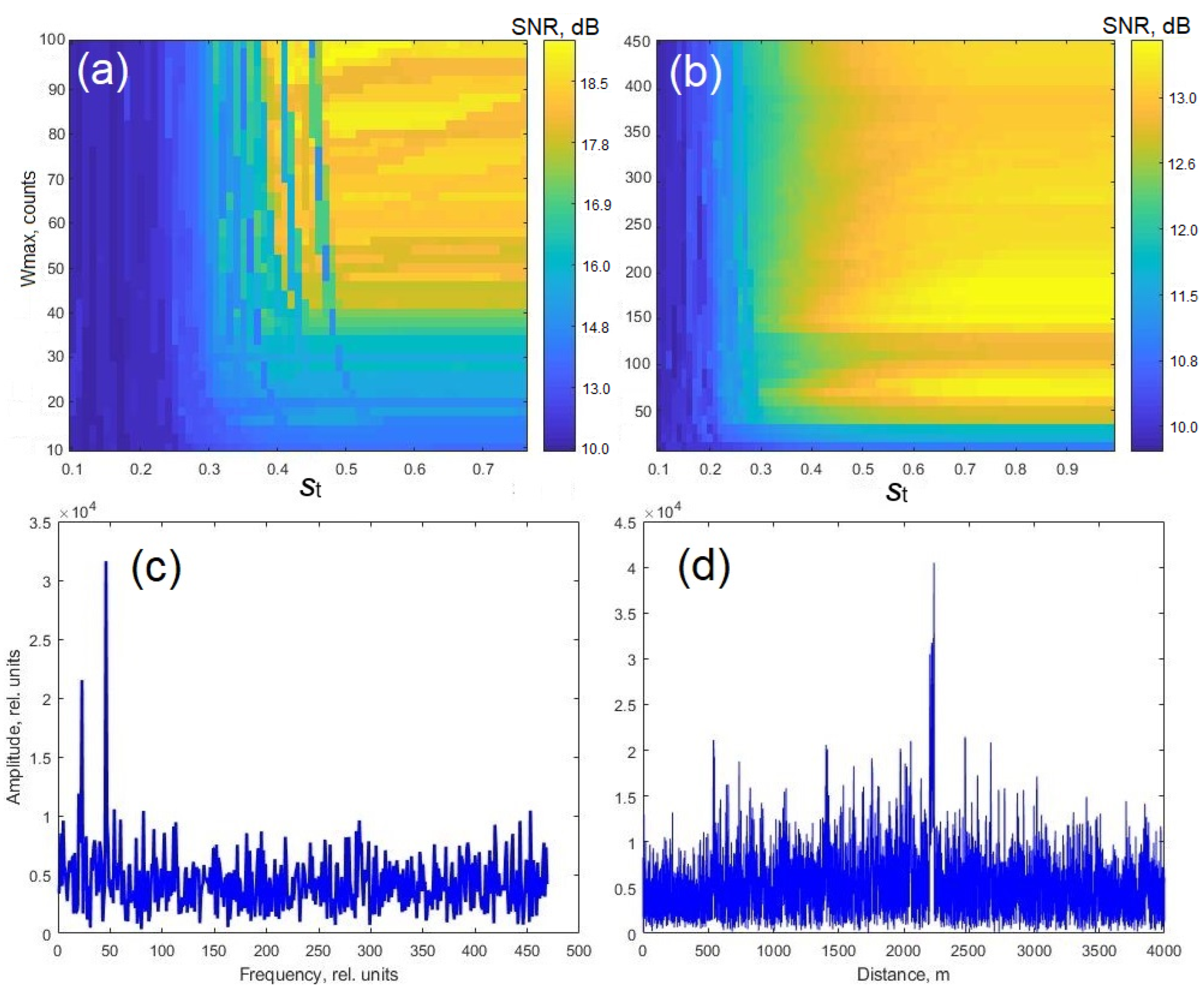
- Intensities within I1 and I2 (assuming that I1 = 0; I2 = 0.2). This region contains the noise of the photodetector. If it is averaged with the maximal window size, then its influence is practically zeroed. However, this will lead to an increase in the number of mathematical operations and a decrease in the algorithm speed. It will also blur the boundaries of neighboring (possibly useful) components of the spectrum. Thus, for these intensity components, it is preferable to set the moving window size to about 80% of the maximal allowable one ().
- (2)
- Intensities within I2 and I3 (I2 = 0.2; I3 = 0.4). Another type of unwanted component may appear in this area: various phantom peaks. The practice of operating inexpensive laser sources has shown that they appear quite often. Sometimes they are electrical in nature and pass through the entire signal in time, frequency, or spatial domains. Since the proposed algorithm will operate in 2D mode, it may help to solve this problem. It is assumed reasonable to use the maximal window size for this intensity region.
- (3)
- Intensities within I3 and I4 (I3 = 0.4; I4 = 1). Obviously, this signal contains the main useful part. Such frequency components should not be smoothed across the spectrum, so the averaging window size should be minimal (ideally zero).
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AFDA | Activation function dynamic averaging |
| AOM | Acousto-optic modulator |
| AWG | Arbitrary waveform generator |
| DAS | Distributed acoustic sensor |
| DAQ | Data acquisition |
| DFB | Distributed feedback |
| EDFA | Erbium-doped fiber amplifier |
| FDDA | Frequency domain dynamic averaging |
| GELU | Gaussian Error Linear Unit |
| MA | Moving averaging |
| MD | Moving differential |
| MOS | Manual optical switch |
| PZT | Piezoelectric transducer |
| SNR | Signal-to-noise ratio |
References
- Karapanagiotis, C.; Krebber, K. Machine Learning Approaches in Brillouin Distributed Fiber Optic Sensors. Sensors 2023, 23, 6187. [Google Scholar] [CrossRef]
- Fomiryakov, E.A.; Bengalskii, D.M.; Kharasov, D.R.; Nanii, O.E.; Nikitin, S.P.; Treshchikov, V.N. Influence of Laser Phase Noise on the Operation of a Coherent Reflectometer Using Fiber with Arrays of Artificial Reflectors. Optoelectron. Instrum. Data Process. 2023, 59, 77–99. [Google Scholar] [CrossRef]
- Alekhin, I.N.; Dashkov, M.V.; Nikulina, T.G. Application of the polarization reflectometry for estimating the distribution of mechanical stress in optical fiber. In Proceedings of the Optical Technologies for Telecommunications 2018, Ufa, Russia, 24 June 2019; Volume 11146, pp. 460–467. [Google Scholar]
- Taranov, M.A.; Gorshkov, B.G.; Alekseev, A.E. Achievement of an 85 km distance range of strain (temperature) measurements using low-coherence Rayleigh reflectometry. Instrum. Exp. Technol. 2020, 63, 527–531. [Google Scholar] [CrossRef]
- Kharasov, D.R.; Bengalskii, D.M.; Vyatkin, M.Y.; Nanii, O.E.E.; Fomiryakov, E.A.; Nikitin, S.P.; Popov, S.M.; Chamorovsky, Y.K.; Treshchikov, V.N. Extending the operation range of a phase-sensitive optical time-domain reflectometer by using fibre with chirped Bragg gratings. Quantum Electron. 2020, 50, 510. [Google Scholar] [CrossRef]
- Lin, Z.; Zhao, Z.; Liu, D.; Tang, M. Ultra-high Frequency Vibration Measurement using Fading Suppressed Coherent φ-OTDR with Randomized Sampling. In Proceedings of the 2022 Conference on Lasers and Electro-Optics (CLEO), San Jose, CA, USA, 15–20 May 2022; pp. 1–2. [Google Scholar]
- Gorshkov, B.G.; Alekseev, A.E.; Simikin, D.E.; Taranov, M.A.; Zhukov, K.M.; Potapov, V.T. A Cost-Effective Distributed Acoustic Sensor for Engineering Geology. Sensors 2022, 22, 9482. [Google Scholar] [CrossRef] [PubMed]
- Hartog, A.; Liokumovich, L.B.; Ushakov, N.A.; Kotov, O.I.; Dean, T.; Cuny, T.; Constantinou, A. The use of multi-frequency acquisition to significantly improve the quality of fibre-optic distributed vibration sensing. In Proceedings of the 78th EAGE Conference and Exhibition 2016, Vienna, Austria, 30 May–2 June 2016; pp. 1–5. [Google Scholar]
- Zhirnov, A.A.; Choban, T.V.; Stepanov, K.V.; Koshelev, K.I.; Chernutsky, A.O.; Pnev, A.B.; Karasik, V.E. Distributed acoustic sensor using a double sagnac interferometer based on wavelength division multiplexing. Sensors 2022, 22, 2772. [Google Scholar] [CrossRef] [PubMed]
- Zhirnov, A.A.; Chesnokov, G.Y.; Stepanov, K.V.; Gritsenko, T.V.; Khan, R.I.; Koshelev, K.I.; Chernutsky, A.O.; Svelto, C.; Pnev, A.B.; Valba, O.V. Fiber-Optic Telecommunication Network Wells Monitoring by Phase-Sensitive Optical Time-Domain Reflectometer with Disturbance Recognition. Sensors 2023, 23, 4978. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, R.; Deng, Z.; Liang, Y.; Jiang, J.; Wang, Z. High-Performance Distributed Acoustic Sensing with Coherent Detection. In Proceedings of the 2022 IEEE 10th International Conference on Information, Communication and Networks (ICICN), Zhangye, China, 23–24 August 2022; pp. 485–488. [Google Scholar]
- Yablochkin, K.A.; Dashkov, M.V. Study of the vibration detection using few-mode optical fiber. In Proceedings of the XVII International Scientific and Technical Conference “Optical Technologies for Telecommunications”, Kazan, Russia, 22 May 2020; Volume 11516, pp. 236–242. [Google Scholar]
- Wang, S.; Liu, F.; Liu, B. Semi-supervised deep learning in high-speed railway track detection based on distributed fiber acoustic sensing. Sensors 2022, 22, 413. [Google Scholar] [CrossRef]
- Egan, D.A.; James, S.W.; Tatam, R.P. A polarization-based optical fibre vibrometer. Meas. Sci. Technol. 1997, 8, 343. [Google Scholar] [CrossRef]
- Titov, A.; Fan, Y.; Jin, G.; Tura, A.; Kutun, K.; Miskimins, J. Experimental investigation of distributed acoustic fiber-optic sensing in production logging: Thermal slug tracking and multiphase flow characterization. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 5–8 October 2020; p. D041S044R006. [Google Scholar]
- Peng, Z.; Jian, J.; Wen, H.; Gribok, A.; Wang, M.; Liu, H.; Huang, S.; Mao, Z.-H.; Chen, K.P. Distributed fiber sensor and machine learning data analytics for pipeline protection against extrinsic intrusions and intrinsic corrosions. Opt. Express 2020, 28, 27277–27292. [Google Scholar] [CrossRef]
- Matveenko, V.; Kosheleva, N.; Serovaev, G.; Fedorov, A. Measurement of Gradient Strain Fields with Fiber-Optic Sensors. Sensors 2022, 23, 410. [Google Scholar] [CrossRef] [PubMed]
- Gao, L.; Qian, J.; Han, C.; Qin, S.; Feng, K. Experimental Study of Deformation Measurement of Bored Pile Using OFDR and BOTDR Joint Optical Fiber Sensing Technology. Sustainability 2022, 14, 16557. [Google Scholar] [CrossRef]
- Abedin, S.; Biondi, A.M.; Wu, R.; Cao, L.; Wang, X. Structural health monitoring using a new type of distributed fiber optic smart textiles in combination with optical frequency domain reflectometry (OFDR): Taking a pedestrian bridge as case study. Sensors 2023, 23, 1591. [Google Scholar] [CrossRef]
- Murayama, H.; Kageyama, K.; Uzawa, K.; Igawa, H.; Omichi, K.; Machijima, Y. Distributed fiber-optic sensing system with OFDR and its applications to structural health monitoring. In Proceedings of the Second International Conference on Smart Materials and Nanotechnology in Engineering, Weihai, China, 20 October 2009; Volume 7493, pp. 118–125. [Google Scholar]
- Stepanov, K.V.; Zhirnov, A.A.; Sazonkin, S.G.; Pnev, A.B.; Bobrov, A.N.; Yagodnikov, D.A. Non-invasive acoustic monitoring of gas turbine units by fiber optic sensors. Sensors 2022, 22, 4781. [Google Scholar] [CrossRef] [PubMed]
- Bakhoum, E.G.; Zhang, C.; Cheng, M.H. Real time measurement of airplane flutter via distributed acoustic sensing. Aerospace 2020, 7, 125. [Google Scholar] [CrossRef]
- Nordon, A.; Waddell, R.J.; Bellamy, L.J.; Gachagan, A.; McNab, D.; Littlejohn, D.; Hayward, G. Monitoring of a heterogeneous reaction by acoustic emission. Analyst 2004, 129, 463–467. [Google Scholar] [CrossRef]
- Chen, B.; Wang, Y.; Yan, Z. Use of acoustic emission and pattern recognition for crack detection of a large carbide anvil. Sensors 2018, 18, 386. [Google Scholar] [CrossRef]
- Zhang, L.; Ji, H.; Liu, L.; Zhao, J. Time–frequency domain characteristics of acoustic emission signals and critical fracture precursor signals in the deep granite deformation process. Appl. Sci. 2021, 11, 8236. [Google Scholar] [CrossRef]
- Haile, M.A.; Bordick, N.E.; Riddick, J.C. Distributed acoustic emission sensing for large complex air structures. Struct. Health Monit. 2018, 17, 624–634. [Google Scholar] [CrossRef]
- Mendoza, E.; Prohaska, J.; Kempen, C.; Esterkin, Y.; Sun, S.; Krishnaswamy, S. Distributed fiber optic acoustic emission sensor (FAESense™) system for condition based maintenance of advanced structures. In Proceedings of the Optical Sensors, Rio Grande, PR, USA, 14–17 July 2013; p. SM4C-4. [Google Scholar]
- Liang, S.; Zhang, C.; Lin, W.; Li, L.; Li, C.; Feng, X.; Lin, B. Fiber-optic intrinsic distributed acoustic emission sensor for large structure health monitoring. Opt. Lett. 2009, 34, 1858–1860. [Google Scholar] [CrossRef]
- Marcon, L.; Galtarossa, A.; Palmieri, L. High-frequency high-resolution distributed acoustic sensing by optical frequency domain reflectometry. Opt. Express 2019, 27, 13923–13933. [Google Scholar] [CrossRef] [PubMed]
- Paitz, P.; Edme, P.; Schmelzbach, C.; Doetsch, J.; Gräff, D.; Walter, F.; Lindsey, N.; Chalari, A.; Fichtner, A. Distributed Acoustic Sensing from mHz to kHz: Empirical Investigations of DAS instrument response. Copernic. Meet. 2020, EGU2020, 7343. [Google Scholar]
- Tang, J.; Cai, L.; Li, C.; Yang, M.; Guo, H.; Gan, W. Distributed acoustic sensors with wide frequency response based on UWFBG array utilizing dual-pulse detection. Opt. Fiber Technol. 2021, 61, 102452. [Google Scholar] [CrossRef]
- Iida, D.; Toge, K.; Manabe, T. High-frequency distributed acoustic sensing faster than repetition limit with frequency-multiplexed phase-OTDR. In Proceedings of the Optical Fiber Communication Conference, Anaheim, CA, USA, 20–24 March 2016; p. M2D-6. [Google Scholar]
- Escobedo, J.B.; Jason, J.; López-Mercado, C.A.; Spirin, V.V.; Wuilpart, M.; Mégret, P.; Korobko, D.A.; Zolotovskiy, I.O.; Fotiadi, A.A. Distributed measurements of vibration frequency using phase-OTDR with a DFB laser self-stabilized through PM fiber ring cavity. Results Phys. 2019, 12, 1840–1842. [Google Scholar] [CrossRef]
- Popov, S.M.; Butov, O.V.; Bazakutsa, A.P.; Vyatkin, M.Y.; Chamorovskii, Y.K.; Fotiadi, A.A. Random lasing in a short Er-doped artificial Rayleigh fiber. Results Phys. 2020, 16, 102868. [Google Scholar] [CrossRef]
- Bublin, M. Event detection for distributed acoustic sensing: Combining knowledge-based, classical machine learning, and deep learning approaches. Sensors 2021, 21, 7527. [Google Scholar] [CrossRef]
- Shiloh, L.; Eyal, A.; Giryes, R. Efficient processing of distributed acoustic sensing data using a deep learning approach. J. Light. Technol. 2019, 37, 4755–4762. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Zhao, L.; Fan, Z. An event recognition method for Φ-OTDR sensing system based on deep learning. Sensors 2019, 19, 3421. [Google Scholar] [CrossRef]
- Turov, A.T.; Konstantinov, Y.A.; Barkov, F.L.; Korobko, D.A.; Zolotovskii, I.O.; Lopez-Mercado, C.A.; Fotiadi, A.A. Enhancing the Distributed Acoustic Sensors’(DAS) Performance by the Simple Noise Reduction Algorithms Sequential Application. Algorithms 2023, 16, 217. [Google Scholar] [CrossRef]
- Zhu, X.; Zhao, S.; Li, X.; Zhang, R.; Kong, M. Optimization of the moving averaging–moving differential algorithm for Φ-OTDR. Appl. Opt. 2022, 61, 5633–5639. [Google Scholar] [CrossRef]
- Liang, Y.; Wang, Z.; Lin, S.; Wang, Y.; Jiang, J.; Qiu, Z.; Liu, C.; Rao, Y. Optical-pulse-coding phase-sensitive OTDR with mismatched filtering. Sci. China Inf. Sci. 2022, 65, 192303. [Google Scholar] [CrossRef]
- Poddubrovskii, N.R.; Lobach, I.A.; Kablukov, S.I. Signal Processing in Optical Frequency Domain Reflectometry Systems Based on Self-Sweeping Fiber Laser with Continuous-Wave Intensity Dynamics. Algorithms 2023, 16, 260. [Google Scholar] [CrossRef]
- Lopez-Mercado, C.A.; Korobko, D.A.; Zolotovskii, I.O.; Fotiadi, A.A. Application of Dual-Frequency Self-Injection Locked DFB Laser for Brillouin Optical Time Domain Analysis. Sensors 2021, 21, 6859. [Google Scholar] [CrossRef] [PubMed]
- Barkov, F.L.; Krivosheev, A.I.; Konstantinov, Y.A.; Davydov, A.R. A Refinement of Backward Correlation Technique for Precise Brillouin Frequency Shift Extraction. Fibers 2023, 11, 51. [Google Scholar] [CrossRef]
- Krivosheev, A.I.; Konstantinov, Y.A.; Krishtop, V.V.; Turov, A.T.; Barkov, F.L.; Zhirnov, A.A.; Garin, E.O.; Pnev, A.B. A Neural Network Method for The BFS Extraction. In Proceedings of the 2022 International Conference Laser Optics (ICLO), St. Petersburg, Russia, 20–24 June 2022. [Google Scholar]
- Qian, X.; Wang, Z.; Wang, S.; Xue, N.; Sun, W.; Zhang, L.; Zhang, B.; Rao, Y. 157 km BOTDA with pulse coding and image processing. In Proceedings of the Sixth European Workshop on Optical Fibre Sensors, Limerick, Ireland, 31 May–3 June 2016; Volume 9916, pp. 395–398. [Google Scholar]
- Soto, M.A.; Ramírez, J.A.; Thévenaz, L. Optimizing image denoising for long-range Brillouin distributed fiber sensing. J. Light. Technol. 2017, 36, 1168–1177. [Google Scholar] [CrossRef]
- Hu, Y.; Shang, Q. Performance enhancement of BOTDA based on the image super-resolution reconstruction. IEEE Sens. J. 2021, 22, 3397–3404. [Google Scholar] [CrossRef]
- Ashry, I.; Mao, Y.; Al-Fehaid, Y.; Al-Shawaf, A.; Al-Bagshi, M.; Al-Brahim, S.; Ng, T.K.; Ooi, B.S. Early detection of red palm weevil using distributed optical sensor. Sci. Rep. 2020, 10, 3155. [Google Scholar] [CrossRef]
- Ashry, I.; Wang, B.; Mao, Y.; Sait, M.; Guo, Y.; Al-Fehaid, Y.; Al-Shawaf, A.; Ng, T.K.; Ooi, B.S. CNN–Aided Optical Fiber Distributed Acoustic Sensing for Early Detection of Red Palm Weevil: A Field Experiment. Sensors 2022, 22, 6491. [Google Scholar] [CrossRef]
- Abdollahi, M.; Giovenazzo, P.; Falk, T.H. Automated beehive acoustics monitoring: A comprehensive review of the literature and recommendations for future work. Appl. Sci. 2022, 12, 3920. [Google Scholar] [CrossRef]
- Khait, I.; Lewin-Epstein, O.; Sharon, R.; Saban, K.; Goldstein, R.; Anikster, Y.; Zeron, Y.; Agassy, C.; Nizan, S.; Sharabi, G.; et al. Sounds emitted by plants under stress are airborne and informative. Cell 2023, 186, 1328–1336. [Google Scholar] [CrossRef]
- Shang, Y.; Yang, J.; Chen, W.; Yi, J.; Sun, M.; Du, Y.; Huang, S.; Zhao, W.; Qu, S.; Wang, W.; et al. Speech signal enhancement based on deep learning in distributed acoustic sensing. Opt. Express 2023, 31, 4067–4079. [Google Scholar] [CrossRef]
- Xu, R.; Sun, J.; Wang, Y.; Zhang, S.; Zhong, W.; Wang, Z. Speech Enhancement Based on Array-processing-assisted Distributed Fiber Acoustic Sensing. IEEE Sens. J. 2023, 23, 11656–11661. [Google Scholar] [CrossRef]
- Tomboza, W.; Guerrier, S.; Awwad, E.; Dorize, C. High sensitivity differential phase OTDR for acoustic signals detection. IEEE Photonics Technol. Lett. 2021, 33, 645–648. [Google Scholar] [CrossRef]
- Iliev, Y.; Ilieva, G. A Framework for Smart Home System with Voice Control Using NLP Methods. Electronics 2022, 12, 116. [Google Scholar] [CrossRef]
- Froiz-Míguez, I.; Fraga-Lamas, P.; Fernández-Caramés, T.M. Design, Implementation and Practical Evaluation of a Voice Recognition Based IoT Home Automation System for Low-Resource Languages and Resource-Constrained Edge IoT Devices: A System for Galician and Mobile Opportunistic Scenarios. IEEE Access 2023, 11, 63623–63649. [Google Scholar] [CrossRef]
- Torad, M.A.; Bouallegue, B.; Ahmed, A.M. A voice controlled smart home automation system using artificial intelligent and internet of things. TELKOMNIKA 2022, 20, 808–816. [Google Scholar] [CrossRef]
- Sangaiah, A.K.; Javadpour, A.; Ja’fari, F.; Zavieh, H.; Khaniabadi, S.M. SALA-IoT: Self-reduced internet of things with learning automaton sleep scheduling algorithm. IEEE Sens. J. 2023. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser Type | Event Frequency, kHz | SNR, dB | |||
|---|---|---|---|---|---|
| No Filtering | MA-MD | AFDA | MA-MD and AFDA | ||
| Commercial | 0.5 | 18.8 | 27.3 | 22.5 | 29.2 |
| 8 | 19.6 | 19.6 | 23.3 | 23.4 | |
| Homemade | 0.5 | 15.7 | 25.0 | 19.3 | 26.5 |
| 8 | 17.9 | 19.2 | 21.4 | 22.8 | |
| Algorithm | Computation Time, s | Spatial Resolution, m |
|---|---|---|
| MA-MD | 13.1 | 1 |
| AFDA | 24.9 | 1 |
| FDDA | 200.0 | 100 |
| Algorithm | Most Suitable Event Type | Limitations | Potential Applications |
|---|---|---|---|
| MA-MD | Pointwise | Requires event frequency information; partial data loss; high frequencies reduce efficiency | Railway monitoring, pest registration, flow metering |
| AFDA | Distributed; high-frequency | The signal fraction should be less than noise fraction; may require information on signal characteristics | Flaw detection, perimeter security, bee and plant monitoring |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turov, A.T.; Barkov, F.L.; Konstantinov, Y.A.; Korobko, D.A.; Lopez-Mercado, C.A.; Fotiadi, A.A. Activation Function Dynamic Averaging as a Technique for Nonlinear 2D Data Denoising in Distributed Acoustic Sensors. Algorithms 2023, 16, 440. https://doi.org/10.3390/a16090440
Turov AT, Barkov FL, Konstantinov YA, Korobko DA, Lopez-Mercado CA, Fotiadi AA. Activation Function Dynamic Averaging as a Technique for Nonlinear 2D Data Denoising in Distributed Acoustic Sensors. Algorithms. 2023; 16(9):440. https://doi.org/10.3390/a16090440
Chicago/Turabian StyleTurov, Artem T., Fedor L. Barkov, Yuri A. Konstantinov, Dmitry A. Korobko, Cesar A. Lopez-Mercado, and Andrei A. Fotiadi. 2023. "Activation Function Dynamic Averaging as a Technique for Nonlinear 2D Data Denoising in Distributed Acoustic Sensors" Algorithms 16, no. 9: 440. https://doi.org/10.3390/a16090440
APA StyleTurov, A. T., Barkov, F. L., Konstantinov, Y. A., Korobko, D. A., Lopez-Mercado, C. A., & Fotiadi, A. A. (2023). Activation Function Dynamic Averaging as a Technique for Nonlinear 2D Data Denoising in Distributed Acoustic Sensors. Algorithms, 16(9), 440. https://doi.org/10.3390/a16090440