1. Introduction
The Transportation Problem (TP) is one of the most significant types of linear programming problems. The aim of the TP is to minimize the cost of transportation of a given commodity from a number of sources or origins (e.g., factory manufacturing facility) to a number of destinations (e.g., warehouse, store) [
1]. Over the years, many classical and stochastic search approaches have been applied for the purpose of solving the TP.
The Northwest Corner method (NWC) is one of the methods that obtains a basic feasible solution to various transportation problems [
2]. This process very easily allocates the amounts when few demand and destination stations exist. Moreover, frequently, the exported solution does not approach the optimal. The Minimum Cost Method (MCM) [
3] is an alternative method which can yield an initial basic feasible solution. The MCM succeeds in lowering total costs by taking into consideration the lowest available cost values while finding the initial solution. An innovative approach comes from the Vogel Approximation Method (VAM); the VAM is an upgraded version of the MCM which results in a basic feasible solution close to the optimal solution [
3]. Both of them take the unit transportation costs into account and obtain satisfactory results; however, VAM is rather slow and computationally intensive for a large range of values. Nevertheless, it has been proven that in problems with a small range of values and a relatively small number of variables, the above exact methods are quite efficient.
In some cases, TP has a complex structure, multifaceted parameters and a huge amount of data to be studied. Therefore, exact methods do not succeed in finding a suitable solution in an acceptable time period; a result, it is unpractical to use them. Taking into consideration the above, apart from conventional solution techniques, various heuristic and metaheuristic methods have been designed to capitalize on their potential capabilities. Specifically, metaheuristic algorithms attempt to find the best feasible solution, surpassing the other technique as much in terms of quality as in computational time [
4]. Mitsuo Gen, Fulya Atliparmak and Lin Lin applied a Genetic Algorithm (GA) for a two-stage TP using priority-based encoding, showing that the GA has been receiving great attention and can be successfully applied for combinational optimization problems [
5]. Ant Colony Optimization (ACO) algorithms have already proven their efficiency in many complex problems; they constitute a very useful optimization tool for many transportation problems in cases where it is impossible to find an algorithm that finds the optimal solution or in cases where the time interval does not make it possible to approve this solution [
6]. The applications of hybrid methods with the combination of two or more heuristic, metaheuristic or even exact methods are also widespread. Interesting research was undertaken in 2019 by Mohammad Bagher Fakhrzad, Fariba Goodarzian and Golmohammadi [
7]. In their study, four metaheuristic algorithms, including Red deer Algorithm (RDA), Stochastic Fractal Search (SFS), Genetic Algorithm (GA) and Simulated Annealing (SA), as well as two hybrid algorithms, the RDA and GA (HRDGA) algorithm and the Hybrid SFS and SA (HRDGA) algorithm, were utilized to solve the TP, demonstrating significant effectiveness [
7].
Motivated by the above-mentioned applications of metaheuristic algorithms to cope with the TP, this work deals with the application of Particle Swarm Optimization (PSO) to solve the TP effectively. The PSO algorithm was first introduced by Dr. Kennedy and Dr. Eberhart in 1995 and was known as a novel population-based stochastic algorithm, working out complex non-linear optimization problems [
8]. The basic idea was originally inspired by simulations of the social behavior of animals such as bird flocking, fish schooling, etc. Possessing their own intelligence, birds of the group connect with each other, sharing their experiences, and follow and trust the mass in order to reach their food or migrate safely without knowing in advance the optimal way to achieve it. The proposed research is expected to enhance the abilities of both the social behavior and personal behavior of the birds. It is observed that the original PSO has deficits in premature convergence, especially for problems with multiple local optimums [
9]. The swarm’s ability to function with social experience as well as personal experience is determined in the algorithm through two stochastic acceleration components, known as the cognitive and social components [
10]. These components have the aptitude to guide the particles in the original PSO method to the optimum point as the correct selection of their values is the key influence on the success and efficiency of the algorithm. Much research has been carried out with a focus on finding out the best combination of these components [
10].
First, this paper examines approaches that have already been applied with great success to solve the TP. Adding to the above, two new PSO variations are presented and applied to solve the TP, operating proper transformations of the main PSO parameters. Experimental results show that these new PSO variations have very good performance and efficiency in solving the TP compared to the former methods.
In order to confirm the technical merit and the applied value of our study, 32 instances of the TP with different sizes have been solved to evaluate and demonstrate the performance of the proposed PSO variations. Their experimental results are compared with those of well-known exact methods, proving their superiority over them. One major innovation of the proposed variations is the appropriate combination of acceleration coefficients (parameters
c1,
c2) and inertia weight (parameter
w) [
11] (see
Section 3) in order to come up with better computational results compared to existing approaches. Exhaustive experimental results demonstrate that the performance of the new PSO variations noted significantly higher performance not only compared to the exact methods already applied to solve the TP but also compared to the other PSO variations already introduced in the respective literature. Furthermore, in order to check the stability of the proposed PSO variations, many different combinations of the main PSO parameters were tested and validated.
The contribution of the paper is as follows:
According to our knowledge, PSO has already been applied for solving the fixed- charged TP, and a heuristic approach was used in order to find the shortest path in a network of routes with a standard number of points connected to each other. For the first time, the PSO-based algorithms are applied to solve the basic TP in a large amount of test instances effectively, not only finding the optimal means of items distribution but also discovering the optimal value.
Moreover, two new PSO variations are introduced, which sustain balance between exploration and exploitation of the search space. These variations proved to be very efficient in solving the TP, achieving better results compared not only to deterministic but also to other already-known PSO-based methods.
A thorough experimental analysis has been performed on the PSO variations applied to solve the TP to prove their efficiency and stability.
The remainder of the paper is organized as follows:
Section 2 presents the mathematical formulation of the TP. The PSO algorithm is briefly described in
Section 3.
Section 4 presents the initialization procedure of the basic feasible solutions and the steps of the PSO algorithm for the TP. Both the existing PSO variations as well as the new ones are presented in detail in
Section 5. A well-documented case study is conducted in
Section 6, in order to compare the performance of five exact methods with the classic PSO and its variations. Lastly, conclusive remarks and future recommendations are presented in
Section 7.
2. Transportation Problem (TP)
Many researchers have developed various types of transportation models. The most prevalent was presented by Hitchcock in 1941 [
12]. Similar studies were conducted later by Koopmans in 1949 [
13] and in 1951 by Dantzig [
14]. It is well known that the problem has become quite widespread, so several extensions of transportation model and methods have been subsequently developed. However, how is the Transportation Problem defined?
The TP can be described as a distribution problem, with m suppliers
(warehouses or factories) and
n destinations
(customers or demand points). Each of the
m suppliers can be allocated to any of the
n destinations at a unit shopping cost
, which corresponds to the route from point
i to point
j. The available quantities of each supplier
,
i = 1, 2,…,
m are denoted as
and those of each destination
,
j = 1, 2, …,
n are denoted as
The objective is to determine how to allocate the available amounts from the supply stations to the destination stations while simultaneously achieving the minimum transport cost and also satisfying demand and supply constraints [
12].
The mathematical model of the TP can be formulated as follows:
Equation (1) represents the objective function to be minimized. Equation (2) contains the supply constraints according to which the available number of origin points must be more than or equal to the quantity demanded from the destination points. Respectively, the sum of the amount to be transferred from source to destination must be less than or equal to the available quantity than we possess, as presented in Equation (3). A necessary condition is depicted in Equation (4), as units must take positive and integer values. Without loss of generality, we assume that in this paper, both the supplies and demands are equal following the balanced condition model.
As already mentioned, there are several methods which can lead to finding a basic feasible solution. However, most of the currently used methods for solving transportation problems are considered complex and very expansive in terms of execution time. As a result, it is appealing to seek and discover a metaheuristic approach based on the PSO algorithm to solve the TP efficiently and effectively.
4. The Basic PSO for Solving the TP
The proposed PSO algorithm used to solve the TP is presented in this section. The primary goal is the initialization of the particles according to the problem’s instances. This is achieved through a sub-algorithm (an initialization algorithm), as presented below. Initially, the amounts of the supply and demand were defined in tables. Subsequently, through control conditions, the amounts were randomly distributed, satisfying the constraints of the sums of supply and demand.
First, Algorithm 1 creates two vectors, namely,
Supply and
Demand, which are its input, as shown in lines 1 and 2. Next, variables
m and
n are computed. These variables are equal to the values of parameters
Supply and
Demand, respectively. Then, a matrix is created consisting of random real numbers (line 7). In line 10, the elements of the candidate solution matrix are rounded to the nearest integer as the amounts of commodities should be non-negative integer values. In the following lines of the algorithm, a process of readjustment and redistribution of matrix
L begins so that its values correspond to the given
Supply and
Demand amounts. In lines 11 and 12, the sum of all elements of each row of matrix
L is stored in vector
Sumrow, while the sum of all elements of each column of matrix
L is stored in vector
Sumcol. Then, two new vectors, namely,
s and
d, are created by subtracting
Sumrow from
Supply and
Sumcol from
Demand, respectively. In the following lines, for each cell of the final matrix, the shortcomings of the matrix are located and assembled appropriately to each cell by zeroing out the excess amount of vectors
s and
d. The output of Algorithm 1 is a matrix consisting of the initial solutions (Initial Basic Feasible Solutions—IBFS), which comprises the input of Algorithm 2 (see below). All possible Initial Basic Feasible Solutions (IBFS) are non-negative integer values satisfying the supply and demand constraints.
| Algorithm 1: Initialization algorithm |
 |
Next, we present the structure of the basic PSO algorithm, which will be applied to solve the TP (Algorithm 2). The process starts with the initialization of the population size npop, the maximum number of iterations , the personal and social acceleration coefficients and , the random variables and and, finally, the inertia weight w (line 1). Moreover, subsequently, the Supply, Demand and Cost matrixes are defined (line 2).
Line 6 calculates the total transport cost of each particle. Then, in lines 7 and 8, whether the total cost of the current particle is less than the minimum transport cost calculated up to then is checked. If the statement is true, the value of global best cost is upgraded, and this particle is now defined as the best. This process is continued for all candidate particles. In lines 9 to 14, through an iterative loop, the position and velocity of the particles are calculated using Equations (5) and (6). The algorithm exports the particle with the optimal position and its respective optimal transport cost.
| Algorithm 2: Particle Swarm Optimization algorithm |
 |
The exported values of the particle’s position, although satisfying demand and supply constraints, were observed to be taking occasionally negative and/or fractional values. These values cannot support the aspect of the solution since the values are quoted in quantities (only positive values are allowed); therefore, appropriate modifications have been made for the final form of the particle position.
Two sub-algorithms were designed to repair the algorithm, replacing negative and fractional volumes with natural numbers without breaking the supply and demand conditions.
Algorithm 3 takes as input a matrix—
particle(
i)
. Position—that has negative values in its cells. The aim is for the negative elements to be eliminated as in [
17]. Through an iterative process, which is illustrated in line 3, the algorithm checks each line of the cell of the table and sets as
neg the value of the cell with the negative value. Subsequently, it searches the maximum element of the column where its negative element was found, as shown in lines 5 and 6. The cardinal value of the negative value is subtracted from the cell with the largest negative value, while the cell with the negative value is set to zero. In line 9, a cell is randomly selected from the row that corresponds to the negative element. If the value is positive, the cardinal of the negative element is subtracted from it. Simultaneously, a cell of this row is counterbalanced by adding to it the cardinal of the negative cell as shown in line 13. Algorithm 3 exports the
particle(
i)
.Position with non-negative values, while sustaining the supply and demand conditions.
| Algorithm 3: Negative values repair algorithm |
 |
Applying the above transformation, the result is a matrix with positive but also fractional elements. Algorithm 4 takes as its input the matrix of particles’ positions after removing the negative elements. In line 3, a new matrix named
pos is defined as containing the integer elements of matrix
particle(
i)
.Position. In line 4, a vector named
sumrow is created which contains the sum of each row of the
pos matrix; while in line 5, a vector named
sumcol is created, containing the sum of each column. In lines 6 and 7, the differences between the quantities of the
Supply and
sumrow and
Demand and
sumcol matrices are noted, respectively, in order to record the quantities missing from the
pos matrix. Then, through an iterative loop, the
u cell of
s(
u) is compared with the
v cell of
d(
v). The minimum quantity of these two is selected and entered into the
pos matrix, reallocating the integer amounts in an appropriate manner to satisfy the available supply and demand items. The algorithm terminates when vectors
s and
v are zeroed and the integer quantities are inserted into
pos matrix, which is the output of Algorithm 4. The final solution is a non-negative integer solution matrix satisfying the requested constraints.
| Algorithm 4: Amend fractions |
 |
6. Case Studies and Experimental Results
In this section, the proposed variations of the PSO algorithm are applied in thirty two well-known numerical examples of the TP, as shown in
Table 1. The numerical examples of this study come from the research of B. Amaliah, who compared five different methods, which will be presented briefly below, regarding their performance in solving the TP [
22].
Vogel’s Approximation Method (VAM) is an iterative procedure such that in each step, proper penalties for each available row and column are taken into account through the least cost and the second-least cost of the transportation matrix [
22]. The Total Differences Method 1 (TDM1) was introduced by Hosseini in 2017. The method is based on VAM’s innovation to use penalties for all rows and columns of the transportation matrix. The TDM1 was developed by calculating penalty values only for rows of the transportation matrix [
23]. Amaliah et al., in 2019, represented their new method, known as the Total Opportunity Cost Matrix Minimal Cost (TOCM-MT). This method has a mechanism with which to check the value of the least-cost cell before allocating the maximum units
; this is in contradiction to the TDM1, which directly allocates the maximum units
to the least cost [
24]. Juman and Hoque, in 2015, developed a formulation method called the Juman and Hoque method (JHM). Their study is based on the distribution of supply and demand quantities, taking into account the two minimum-cost cells and their redistribution through penalties [
25]. Finally, the last method presented is known as the Bilqis Chastine Erma Method (BCE), which constitutes an enhanced version of the JHM [
26].
The whole algorithmic approach was implemented using MATLAB R2021b. The algorithm was tested on a set of different dimensional problems. All parameters of the proposed algorithm were selected after exhaustive experimental testing. Each of the four variations was tested using different parameter values, and those values whose computational results were superior to other values were selected. The number of iterations is set to 100. The parameter is set as a random number derived from the uniform distribution in range [0, 1], and is set as the complement of ; that is, . This modification plays a significant part as it is different from the customary application where both and are randomly derived uniformly from range [0, 1]. Using the former relationship between and , we manage to achieve stronger control over these parameters’ values.
In the following table (
Table 2) and
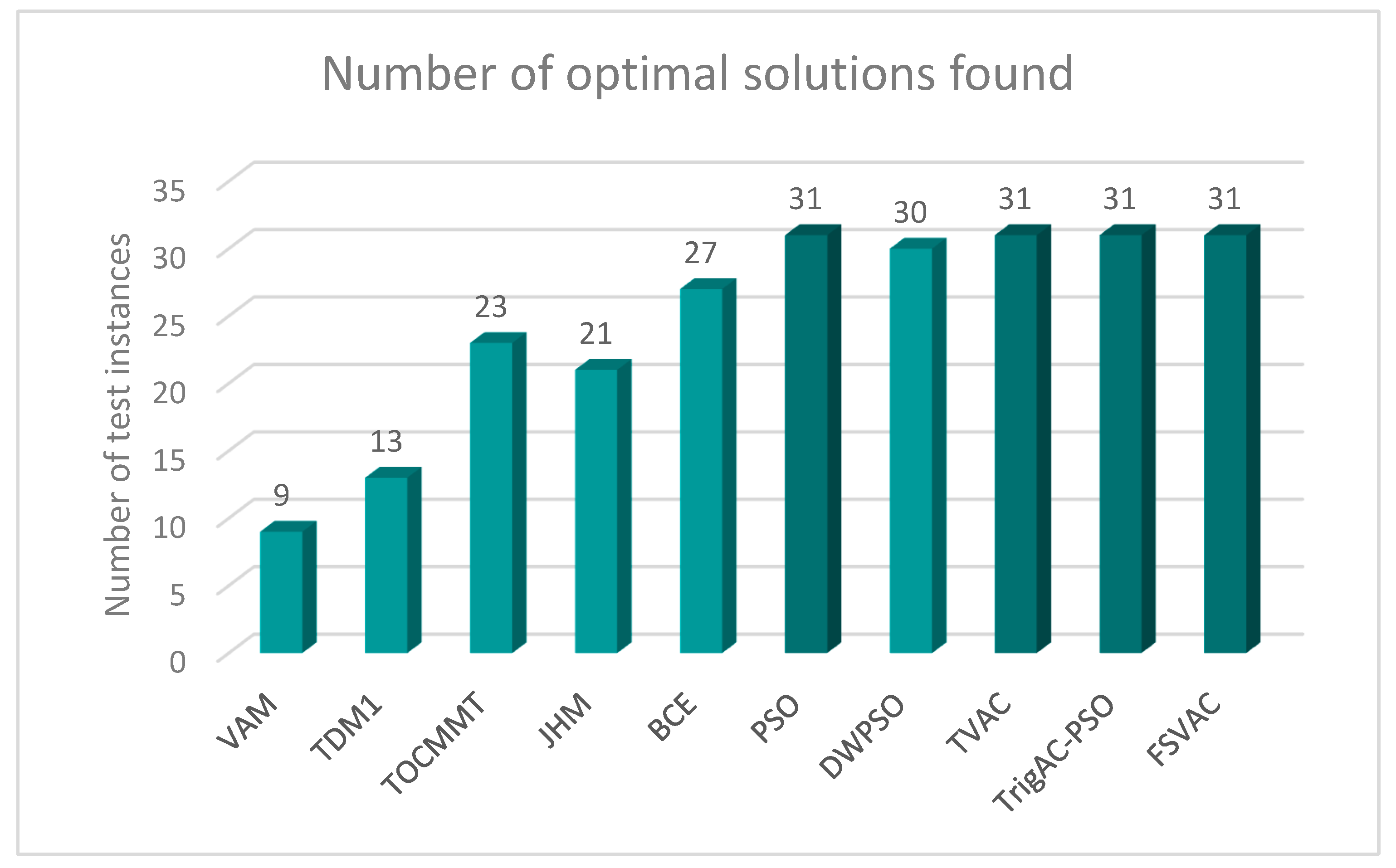
Figure 1, the performance of both the exact methods and the PSO-based ones are presented for 30 Monte Carlo runs; more precisely, the best value achieved by each method is depicted. The last column presents the optimal solution of each numerical problem. As shown, the Vogel method manages to find 9 out of the 32 test instances (28.13%); the Total Differences Method 1 (TDM1) succeeds in finding more optimal solutions than the Vogel method by finding 13 out of 32 optimal solutions (40.63%); using the TOCM-MT method, the results show that the method’s performance is better still, finding the optimum in 23 out of 32 test instances (71.9%); the JHM method, which accumulated 21 optimal solutions, was less effective than TOCM-MT (65.62%); the BCE method, which achieved 27 out of 32 test instances (84.4%), proved to be the most efficient compared to all previously mentioned methods; the classic PSO, the TVAC, the TrigAC-PSO and the FSVAG-PSO achieve the optimum in 31 out of 32 test instances (96.88%), while the PWPSO achieves the optimum in 30 out of the 32 (93.76%).
One significant finding of our research is that the new PSO variation, TrigAC-PSO, which is first presented in this study, achieved very good results. The following table (
Table 3) examines the deviation of VAM, TDM1, TOCM-MT, JHM, BCE, PSO, DuPSO, TVAC, TrigAC-PSO and FSVAC-PSO. The measurement of deviation shows the difference between the observed value and the expected value of a variable, and it is given by the following formula:
where
is the current solution.
Considering
Table 3 and
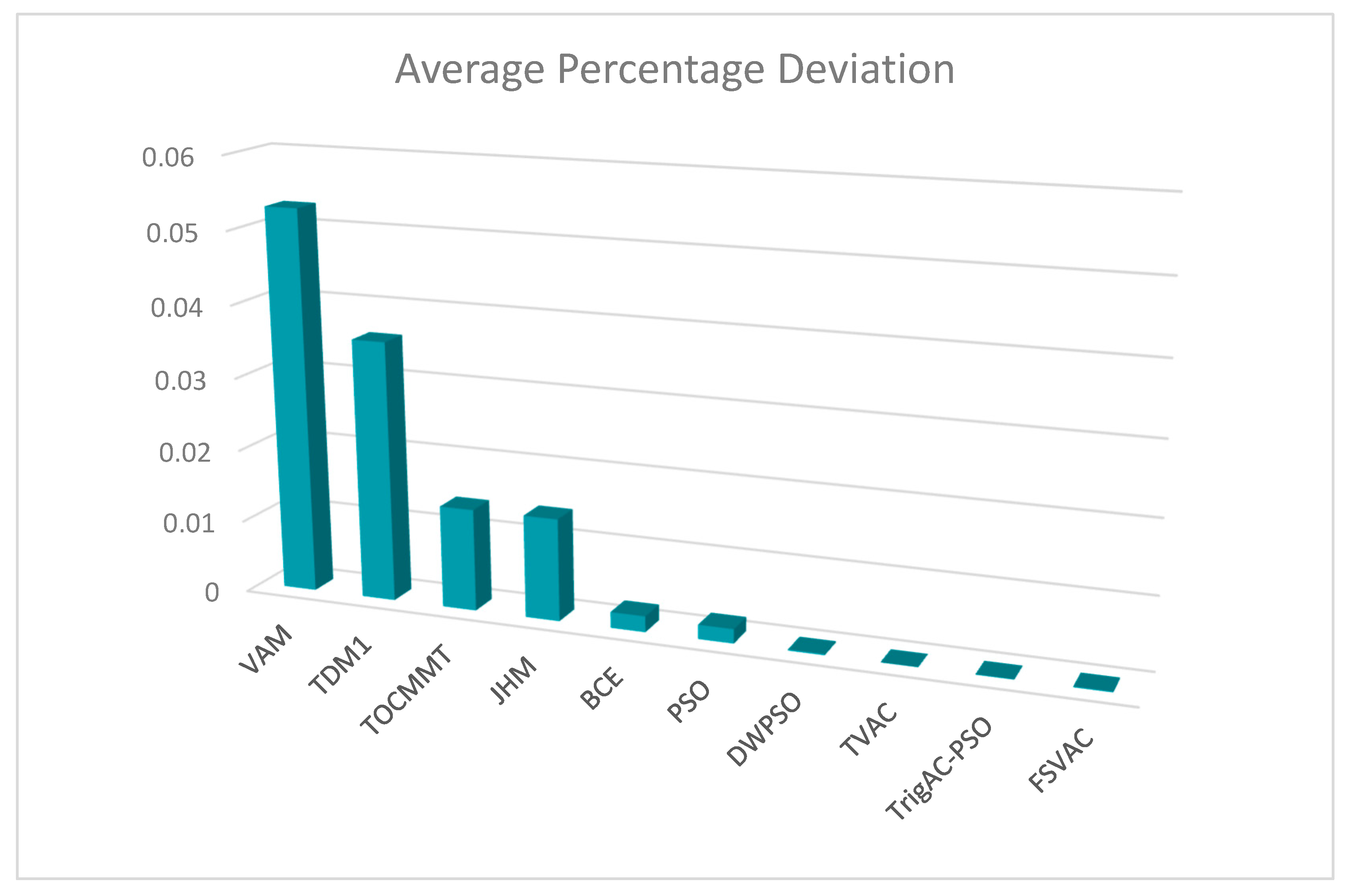
Figure 2, it is evident that method VAM, TDM1, TOCM-MT and 1HM appear to be more inefficient, deviating from the optimal solution at a significant scale. More precisely, the results of
Table 3 show that the solutions achieved by VAM differ from the optimal solution by 5.29%, the results of TDM1 by 3.58%, the results of TOCM-MT by 1.4% and the results of JHM by 1.4%. BCE method presented higher levels of efficiency since the values of deviation were negligible. Analysis of the data of
Table 3 reveals that the percentage of the deviation in classic PSO, as well as in its variations, was almost zero. Furthermore, the TVAC method was nearest to the optimal solution, followed by TrigAC-PSO, FSVAC-PSO and finally by DWPSO.
The findings from the current study provide us with the basic information for an extensive meta-analysis, allowing us to investigate which of the presented PSO variations has better performance in solving the TP. To serve this cause, many experiments were carried out which investigated different values of PSO population size (number of particles). The classic PSO, as well as each one of its variations (DWPSO, TVAC, TrigAC-PSO, FSVAC-PSO), were tested for 10, 15 and 20 particles for all 32 numerical examples. The results presented in
Table 4,
Table 5 and
Table 6 show the performance of the classic PSO as well of its variations for 30 independent runs. The number of generations was stable and equal to 100 for all runs.
Evidence from this study, presented in
Table 4, expounds the accuracy rate of each algorithm for 10 particles. The accuracy rate is given by the following formulation:
where
is the total number of runs where optimal solution was found and
is the number of runs.
Table 4 shows that the classic PSO obtained 38.33% accuracy rate. A significant increase in accuracy rate, using 10 particles, was evident in DWPSO, which achieved 59.58% accuracy, almost twice as much as the percentage of the classic PSO. Moreover, TVAC obtain a 61.45% accuracy rate. The best results came from TrigAC-PSO, since this PSO variation achieved a 62.81% accuracy rate. Last but not least, FSVAC achieved a 59.5% accuracy rate.
Table 4.
Accuracy of PSO, DWPSO, TVAC, TrigAC-PSO and FSVAC for 10 particles.
Table 4.
Accuracy of PSO, DWPSO, TVAC, TrigAC-PSO and FSVAC for 10 particles.
| | PSO | DWPSO | TVAC | TrigAC-PSO | FSVAC |
|---|
| Pr.01 | 0.0333 | 0.2 | 0.4666 | 0.5667 | 0.2333 |
| Pr.02 | 0.7667 | 1 | 1 | 1 | 1 |
| Pr.03 | 1 | 1 | 1 | 1 | 1 |
| Pr.04 | 1 | 1 | 1 | 1 | 1 |
| Pr.05 | 0.2333 | 0.6667 | 0.8333 | 0.8667 | 0.8333 |
| Pr.06 | 0.3667 | 1 | 0.9667 | 1 | 1 |
| Pr.07 | 0.7667 | 0.9 | 1 | 1 | 0.9 |
| Pr.08 | 0 | 0 | 0.2667 | 0.1667 | 0.1334 |
| Pr.09 | 0.0333 | 0.3 | 0.2 | 0.2667 | 0.1 |
| Pr.10 | 0 | 0 | 0.0333 | 0 | 0.0333 |
| Pr.11 | 0.1 | 0.1 | 0.1333 | 0.1 | 0.0667 |
| Pr.12 | 0 | 0.3 | 0.4 | 0.4667 | 0.3667 |
| Pr.13 | 0.5334 | 1 | 1 | 0.8667 | 1 |
| Pr.14 | 0 | 0 | 0 | 0.3333 | 0 |
| Pr.15 | 0.7 | 1 | 1 | 1 | 1 |
| Pr.16 | 0 | 0.4667 | 0.4667 | 0.6667 | 0.5667 |
| Pr.17 | 0.4333 | 0.9 | 0.9333 | 0.9 | 0.8333 |
| Pr.18 | 1 | 1 | 1 | 1 | 1 |
| Pr.19 | 0.4667 | 0.7 | 0.7667 | 0.5 | 0.7333 |
| Pr.20 | 0.4667 | 0.8333 | 0.6667 | 0.8667 | 0.7667 |
| Pr.21 | 0.5667 | 0.5333 | 0.3333 | 0.5333 | 0.3939 |
| Pr.22 | 0.3667 | 1 | 0.9667 | 0.8333 | 1 |
| Pr.23 | 0.0333 | 0.0333 | 0.1667 | 0.1667 | 0.1667 |
| Pr.24 | 0 | 0 | 0 | 0 | 0 |
| Pr.25 | 0.5333 | 0.9667 | 0.9333 | 0.9667 | 1 |
| Pr.26 | 0.4667 | 0.6 | 0.7 | 0.7 | 0.7333 |
| Pr.27 | 0.0333 | 0.4667 | 0.5667 | 0.4 | 0.4667 |
| Pr.28 | 0.2 | 0.2667 | 0.0667 | 0.2 | 0 |
| Pr.29 | 0.8333 | 1 | 1 | 1 | 1 |
| Pr.30 | 0.8667 | 1 | 1 | 1 | 1 |
| Pr.31 | 0.4 | 0.8333 | 0.7 | 0.7 | 0.7 |
| Pr.32 | 0.0667 | 0 | 0 | 0.0333 | 0 |
| Average | 0.383338 | 0.595834 | 0.611459 | 0.6281313 | 0.594603 |
The accuracy rate results for 15 particles are presented in
Table 5. DWPSO achieved 65.31% accuracy, whereas TVAC reached 66.99%. It is of particular interest that TrigAC-PSO achieved the highest accuracy rate once again by reaching 69.8%. Finally, FSVAC obtained an accuracy rate equal to 66.56%.
Table 5.
Accuracy of PSO, DWPSO, TVAC, TrigAC-PSO and FSVAC for 15 particles.
Table 5.
Accuracy of PSO, DWPSO, TVAC, TrigAC-PSO and FSVAC for 15 particles.
| | PSO | DWPSO | TVAC | TrigAC-PSO | FSVAC |
|---|
| Pr.01 | 0.0667 | 0.6 | 0.6333 | 0.6333 | 0.4333 |
| Pr.02 | 0.9667 | 1 | 1 | 1 | 1 |
| Pr.03 | 1 | 1 | 1 | 1 | 1 |
| Pr.04 | 1 | 1 | 1 | 1 | 1 |
| Pr.05 | 0.7 | 0.9 | 1 | 1 | 1 |
| Pr.06 | 0.7 | 1 | 0.9667 | 1 | 1 |
| Pr.07 | 0.7667 | 1 | 1 | 0.9667 | 0.9667 |
| Pr.08 | 0 | 0.0667 | 0.3333 | 0.1667 | 0.0333 |
| Pr.09 | 0.0667 | 0.2333 | 0.2333 | 0.2 | 0.1333 |
| Pr.10 | 0.2667 | 0 | 0 | 0.0667 | 0 |
| Pr.11 | 0.2333 | 0.0667 | 0.3 | 0.2 | 0.0333 |
| Pr.12 | 0.1 | 0.4 | 0.4333 | 0.3333 | 0.2 |
| Pr.13 | 0.5667 | 1 | 1 | 0.9667 | 1 |
| Pr.14 | 0 | 0.0333 | 0 | 0.0667 | 0.1 |
| Pr.15 | 0.3 | 0.9333 | 0.9667 | 1 | 1 |
| Pr.16 | 0 | 0.6 | 0.5 | 0.9333 | 0.5333 |
| Pr.17 | 0.5667 | 0.9 | 1 | 0.9667 | 1 |
| Pr.18 | 1 | 1 | 1 | 1 | 1 |
| Pr.19 | 0.5333 | 0.9 | 0.9 | 0.6667 | 1 |
| Pr.20 | 0.6334 | 0.9667 | 0.8667 | 0.9333 | 1 |
| Pr.21 | 0.6667 | 0.4333 | 0.6667 | 1 | 0.4667 |
| Pr.22 | 0.6 | 1 | 1 | 1 | 1 |
| Pr.23 | 0.0667 | 0.2 | 0.3667 | 0.2333 | 0.2 |
| Pr.24 | 0.6666 | 0 | 0 | 0 | 0 |
| Pr.25 | 0.6333 | 1 | 0.8333 | 1 | 1 |
| Pr.26 | 0.3333 | 1 | 0.8 | 0.6667 | 1 |
| Pr.27 | 0.3667 | 0.4 | 0.4667 | 0.8333 | 1 |
| Pr.28 | 0.3333 | 0.1333 | 0.1 | 0.3333 | 0.1667 |
| Pr.29 | 1 | 1 | 1 | 1 | 1 |
| Pr.30 | 0.9333 | 1 | 1 | 1 | 1 |
| Pr.31 | 0.3667 | 1 | 0.9333 | 1 | 1 |
| Pr.32 | 0.1333 | 0.1333 | 0.1 | 0.1667 | 0.0333 |
| Average | 0.486463 | 0.653122 | 0.669894 | 0.69791875 | 0.665622 |
The accuracy rate results for 20 particles are presented in
Table 6 and
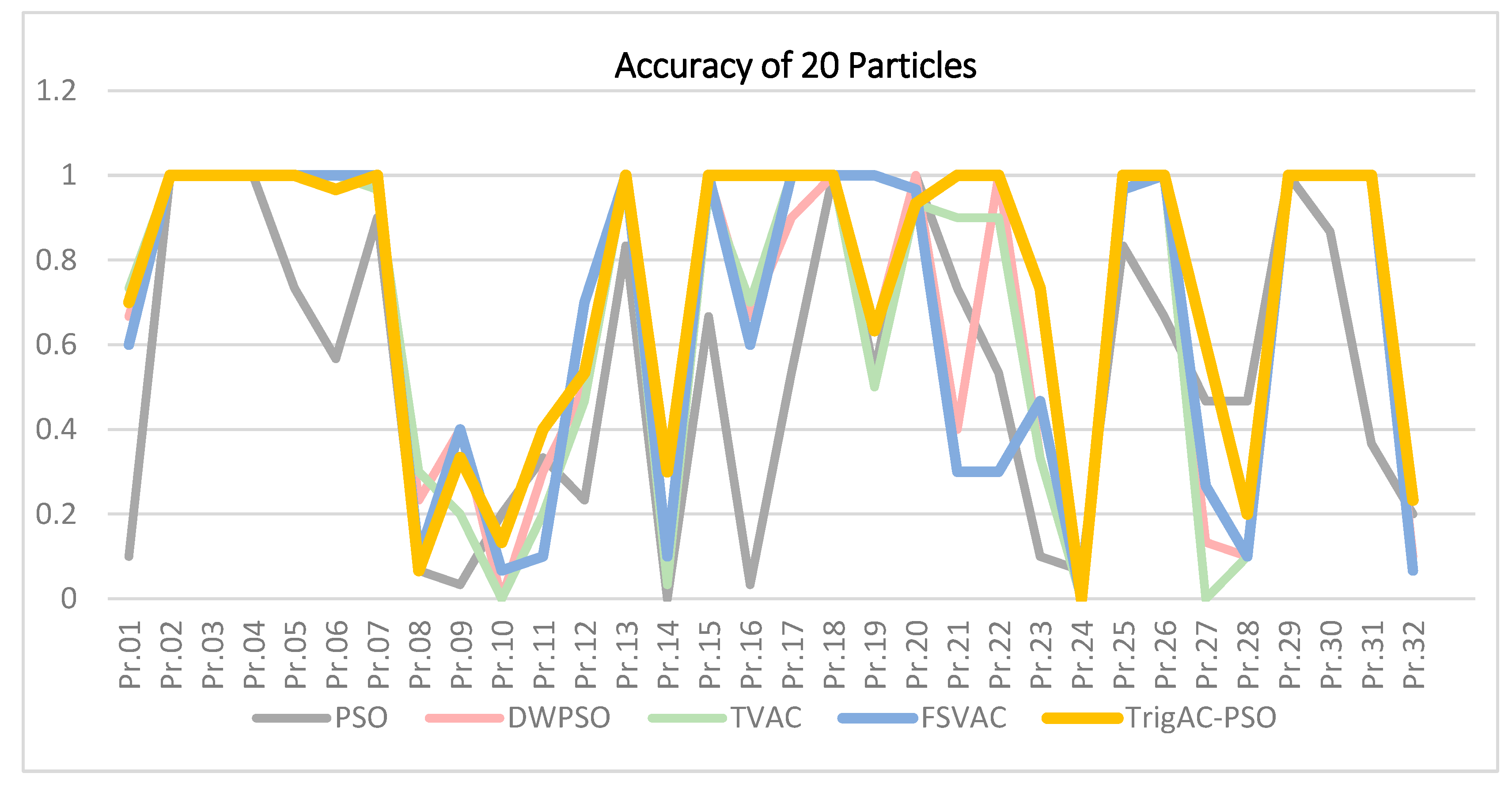
Figure 3. A high percentage of 53.33% was obtained by the classic PSO. Between DWPSO and TVAC, it is evident that both rates were sufficiently close, with accuracy rates ascending up to 66.78% and 66.56%, respectively. FSVAC, the variation which has been proposed and presented in this research, achieved accuracy rate equal to 66%. This new method evinced positive effects in terms of its validity and effectiveness. Last but not least, TrigAC-PSO demonstrated the best performance compared to all other variations, achieving 74.3%. Running the algorithm using 20 particles, TrigAC-PSO found the optimal in 31 out of 32 test instances, reaching 96.88%. Moreover, in 20 out of 32 numerical examples, this variation managed to reach the optimum in all 30 runs, with a success rate of 62.5%. The punctuality of this method rises to 75%; hence, this variation is established, compared to other variations, as the ideal option for the solution of the TP.
Table 6.
Accuracy of PSO, DWPSO, TVAC, TrigAC-PSO and FSVAC for 20 particles.
Table 6.
Accuracy of PSO, DWPSO, TVAC, TrigAC-PSO and FSVAC for 20 particles.
| | PSO | DWPSO | TVAC | TrigAC-PSO | FSVAC |
|---|
| Pr.01 | 0.1 | 0.6667 | 0.7333 | 0.7 | 0.6 |
| Pr.02 | 1 | 1 | 1 | 1 | 1 |
| Pr.03 | 1 | 1 | 1 | 1 | 1 |
| Pr.04 | 1 | 1 | 1 | 1 | 1 |
| Pr.05 | 0.7333 | 1 | 1 | 1 | 1 |
| Pr.06 | 0.5667 | 1 | 1 | 0.9667 | 1 |
| Pr.07 | 0.9 | 0.9667 | 0.9667 | 1 | 1 |
| Pr.08 | 0.0667 | 0.2333 | 0.3 | 0.0667 | 0.1 |
| Pr.09 | 0.0333 | 0.4 | 0.2 | 0.3333 | 0.4 |
| Pr.10 | 0.2 | 0 | 0 | 0.1333 | 0.0667 |
| Pr.11 | 0.3333 | 0.3 | 0.2 | 0.4 | 0.1 |
| Pr.12 | 0.2333 | 0.5 | 0.4667 | 0.5333 | 0.7 |
| Pr.13 | 0.8333 | 1 | 1 | 1 | 1 |
| Pr.14 | 0 | 0.0333 | 0.0333 | 0.3 | 0.1 |
| Pr.15 | 0.6667 | 1 | 0.9667 | 1 | 1 |
| Pr.16 | 0.0333 | 0.6667 | 0.7 | 1 | 0.6 |
| Pr.17 | 0.5333 | 0.9 | 1 | 1 | 1 |
| Pr.18 | 1 | 1 | 1 | 1 | 1 |
| Pr.19 | 0.5333 | 0.6333 | 0.5 | 0.6333 | 1 |
| Pr.20 | 1 | 1 | 0.9333 | 0.9333 | 0.9667 |
| Pr.21 | 0.7333 | 0.4 | 0.9 | 1 | 0.3 |
| Pr.22 | 0.5333 | 1 | 0.9 | 1 | 0.3 |
| Pr.23 | 0.1 | 0.3333 | 0.3333 | 0.7333 | 0.4667 |
| Pr.24 | 0.0667 | 0 | 0 | 0 | 0 |
| Pr.25 | 0.8333 | 1 | 1 | 1 | 0.9667 |
| Pr.26 | 0.6667 | 1 | 1 | 1 | 1 |
| Pr.27 | 0.4667 | 0.1333 | 0 | 0.6 | 0.2667 |
| Pr.28 | 0.4667 | 0.1 | 0.1 | 0.2 | 0.1 |
| Pr.29 | 1 | 1 | 1 | 1 | 1 |
| Pr.30 | 0.8667 | 1 | 1 | 1 | 1 |
| Pr.31 | 0.3667 | 1 | 1 | 1 | 1 |
| Pr.32 | 0.2 | 0.1 | 0.0667 | 0.2333 | 0.0667 |
| Average | 0.533331 | 0.667706 | 0.665625 | 0.7427031 | 0.659381 |
In summary, the proposed method FSVAC-PSO, although it did not demonstrate the highest average success rate, was very accurate in calculating the optimal solution in cases where the aforementioned variations were unable to approach the optimal solution. In more detail, this research experimented on population sizes of 10, 15, 20 particles over 32 well-known test instances used in the respective literature. For each problem, as already mentioned, 30 independent experimental runs were conducted. In the case of 10 particles, the classical PSO found the optimal solution in only in 3 out of 32 test instances in all 30 runs (9.4%); DWPSO found the optimal solution in 10 out of 32 test instances in all 30 runs (31.25%); while TVAC and Trig-PSO managed to find the optimal solution in 9 out of 32 test instances in all 30 runs (28.13%); finally, FSVAC was shown to be the best PSO variation, finding the optimal solution in 11 out of 32 test instances in all 30 runs (34.4%).
In the case of 15 particles, FSVAC also showed the best performance by finding in the optimal solution in 18 out of 32 test instances in all 30 runs (56.25%); the classic PSO found the optimal solution in 4 out of 32 (12.5%) test instances, and TVAC in 11 out of 32, in all 30 runs; last but not least, both DWPSO and TrigAC-PSO found the optimal value in 13 out of 32 test instances in all 30 runs (40.63%).
In the case of 20 particles, the variations TrigAC-PSO and FSVAC are still more accurate than the other PSO variations since they succeeded in finding the optimal solution in 18 out of 32 and in 17 out of 32 test instances in all 30 runs, respectively. The other PSO variations attained relatively lower success rates in finding the optimal solution in all of their runs.
In the following table (
Table 7), the most important statistical measures in the cases of 20 particles for 30 independent runs are represented for all PSO variations. These experimental results demonstrate the very good performance and stability of the proposed PSO variations in solving the TP. As presented, in all cases, the mean value is very close to the best one, showing that all these variations are not only efficient but also quite stable. The value of the Coefficient of Variation (CV), which is the basic measure for proving stability of stochastic algorithms, is, for all PSO variations, quite small; more precisely, the mean CV value is for each PSO variation is as follows: Classic PSO, 2.12%; DWPSO, 1.32%; TVAC, 0.87%; TrigAC-PSO, 0.66%; and FSVAC, 1.26%. These values show that TrigAC-PSO, which is one of the new PSO variations presented in this work, is the most stable one.
The above results urged us to continue the research for an even greater number of particles, in order to study the behavior of new variations in a multi-solution environment.
More specifically, the aforementioned variations were also tested on the set of 40 and 50 particles. In this case, 10 independent runs were carried out for each test instance, reducing the chances of finding the optimal solution from the 30 independent runs that we have already performed. Selecting more particles revealed significant results.
The results showed, once again, the consistent superiority of the proposed variations.
Table 8 and
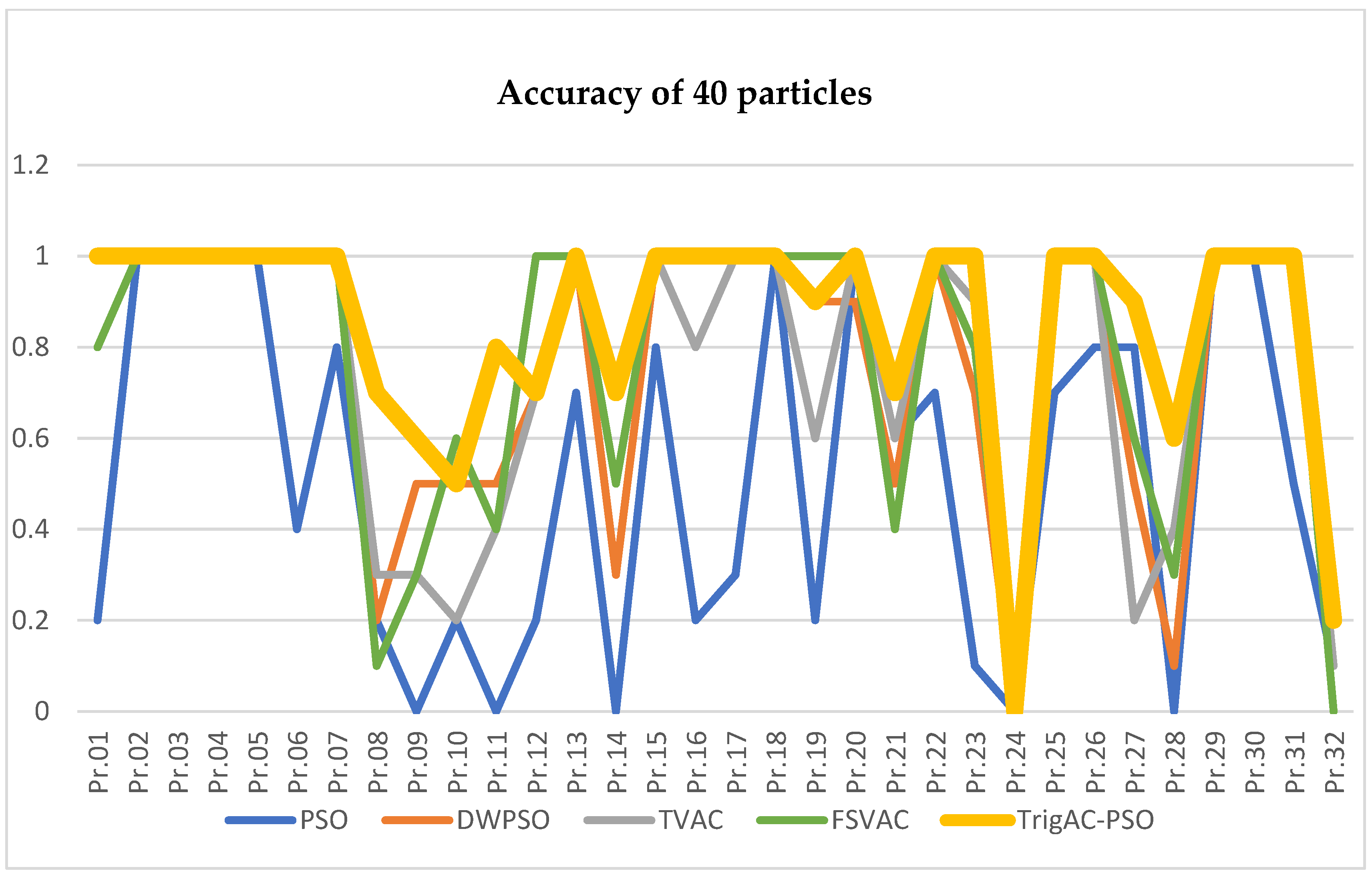
Figure 4 shows the accuracy achieved by each variation for 40 particles. These results provide further support for the hypothesis that TrigAC-PSO and FSVAC are still more accurate than the other PSO variations, since they attained accuracy rates 88.31% and 77.5%, respectively; the DWPSO method follows with 75.94%, and TVAC with 74.38%; last but not least is the classic PSO with 51.56%, attaining a spectacular 13% increase over the 10-particle accuracy rates, but maintaining a steady performance for 15 and 20 particles.
In the following table (
Table 9), the most important statistical measures in the case of 40 particles for 10 independent runs are represented for all PSO variations. According to the particularly low values of the Coefficient of Variation (CV), we can infer that the PSO variations are extremely stable; more precisely, the mean CV value for each PSO variation is as follows: Classic PSO, 2.14%; DWPSO, 0.93%; TVAC, 0.86%; TrigAC-PSO, 0.47%; and FSVAC, 0.81%. These values show that TrigAC-PSO, which is one of the new PSO variations presented in this work, is once again the most stable method.
The following table (
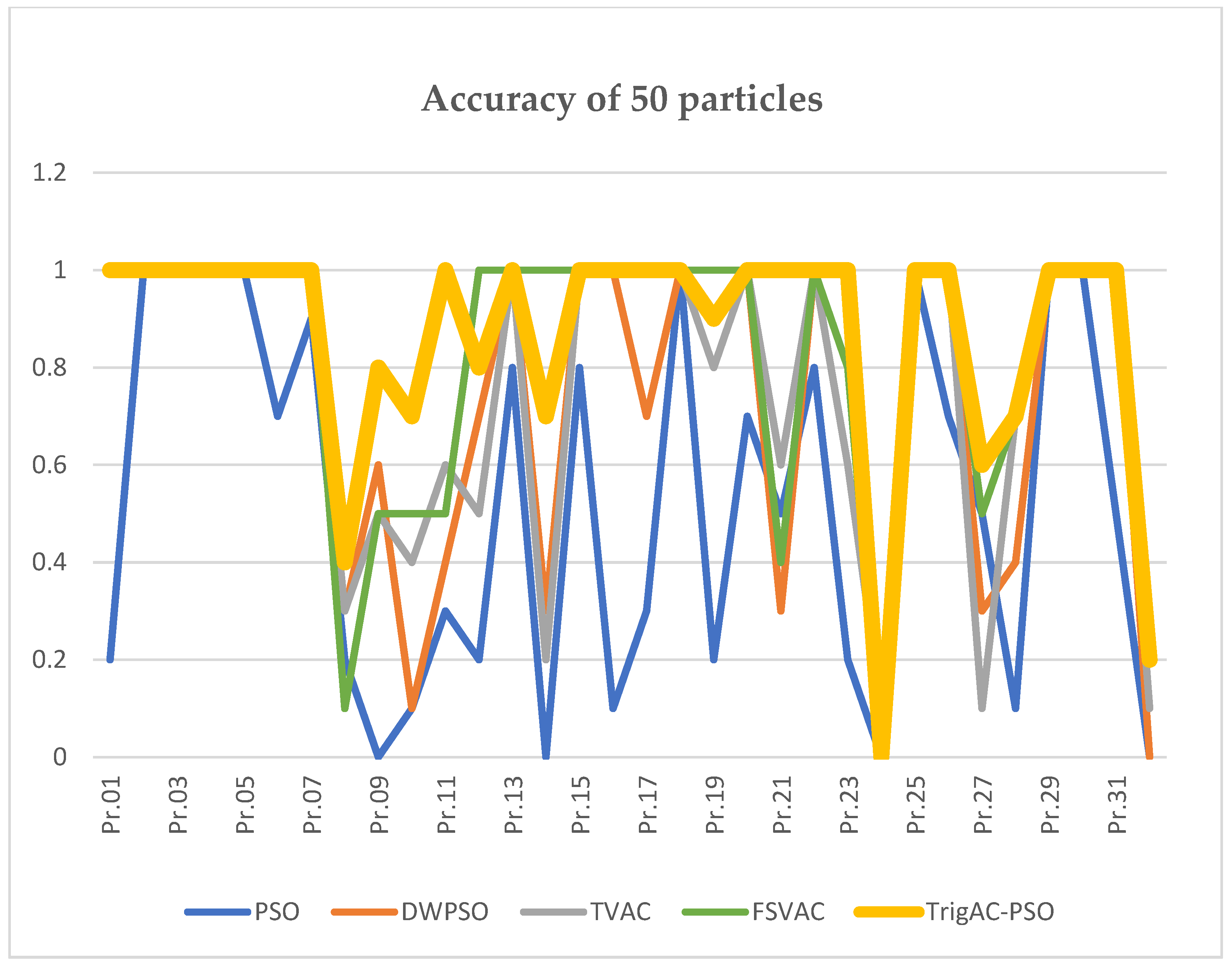
Table 10) and
Figure 5 present the accuracy for the 50 particles. The accuracy for each PSO variation is as follows: Classic PSO, 52.5%; DWPSO, 74.3%; TVAC, 76.56%; TrigAC-PSO, 86.88%; and FSVAC, 82.19%. The two new variations range at the highest levels. These are particularly promising results, demonstrating that the increase in the particle’s number leads to an increase in the PSO variation’s accuracy, especially in the case of TrigAC-PSO and FSVAC. The results of 50 particles are equal to or better than the results that are currently presented. Overall, TrigAC-PSO was the one that obtained the most robust results.
The results of
Table 11 lead to similar conclusions. In order to examine the stability for the 50 particles, it is worth comparing the CV values of the proposed variations with those of the traditional variations. Superior results are seen from TrigAC-PSO, as the CV value is equal to 0.4%, followed by the FSVAC with 0.59%. The other values of variations ranged as follows: Classic PSO, 2.19%; DWPSO, 0.77%; and TVAC, 0.83%.
The overall results demonstrate two inferences of decisive importance: first, the PSO algorithm and its variations have successfully solved the TP with maximum accuracy and efficiency; second, TrigAC-PSO, beyond any doubt, is the leading option for solving the TP in terms of both stability and the solution’s quality.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




