

Fault-Diagnosis Method for Rotating Machinery Based on SVMD Entropy and Machine Learning



Abstract
:1. Introduction
- Selection of fault-feature vectors. Effective fault-feature vectors are crucial for rotating-machinery fault diagnosis, but it is challenging to choose the right ones due to the many types of faults and their corresponding feature vectors.
- Machine-learning classification methods. Machine-learning algorithms are used for classification, but it is challenging to choose the appropriate algorithm, adjust the hyperparameters, and handle the problem of data imbalance due to the small amount of fault data and the imbalance of sample sizes for different fault types.
- Accurate fault diagnosis. Accurately diagnosing faults is the main goal, but it is challenging due to the need to analyze the fault-feature vectors and machine-learning classification results, select different diagnosis methods for different fault types, and achieve real-time diagnosis during operation.
2. Signal-Decomposition Methods
2.1. Variational-Mode Decomposition (VMD)
- (1)
- Initialize , , , and n to 0.
- (2)
- n = n + 1; execute the entire loop.
- (3)
- Execute the first loop of the inner level based on , , ) and update .
- (4)
- k = k + 1 and repeat step (3) until k = K; then end the first loop of the inner layer.
- (5)
- Execute the second loop of the inner level based on and update .
- (6)
- k = k + 1 and repeat step (5) until k = K, then end the second loop in the inner layer.
- (7)
- Based on , update .
- (8)
- Repeat steps (2)(7) until the iteration-stop condition is satisfied, end the whole loop, and output the result to get K narrowband IMF components.
2.2. Successive Variational-Mode Decomposition (SVMD)
- (1)
- Initialize , , and to .
- (2)
- ; execute the entire loop.
- (3)
- Update all , where based on .
- (4)
- Update based on .
- (5)
- Update , where all base on .
- (6)
- Repeat steps (2)(5) until the iteration-stop condition is satisfied; then end the whole loop and output the result.
- (1)
- Set parameters , , , , and .
- (2)
- , ; execute the entire loop.
- (3)
- Set , , , , and , and is initialized to 0 or a random value between 0 and .
- (4)
- ; execute the first loop of the inner level.
- (5)
- ; execute the second inner loop.
- (6)
- Update all , where based on .
- (7)
- Update based on .
- (8)
- Update all , where based on .
- (9)
- Repeat steps (5)(8) until the iteration-stop condition is satisfied and end the second loop in the inner layer.
- (10)
- Set , , , , and ; repeat step (4)(9) until is satisfied; and end the first loop of the inner layer.
- (11)
- Repeat steps (2)(10) until is satisfied, end the whole loop, and output the result.
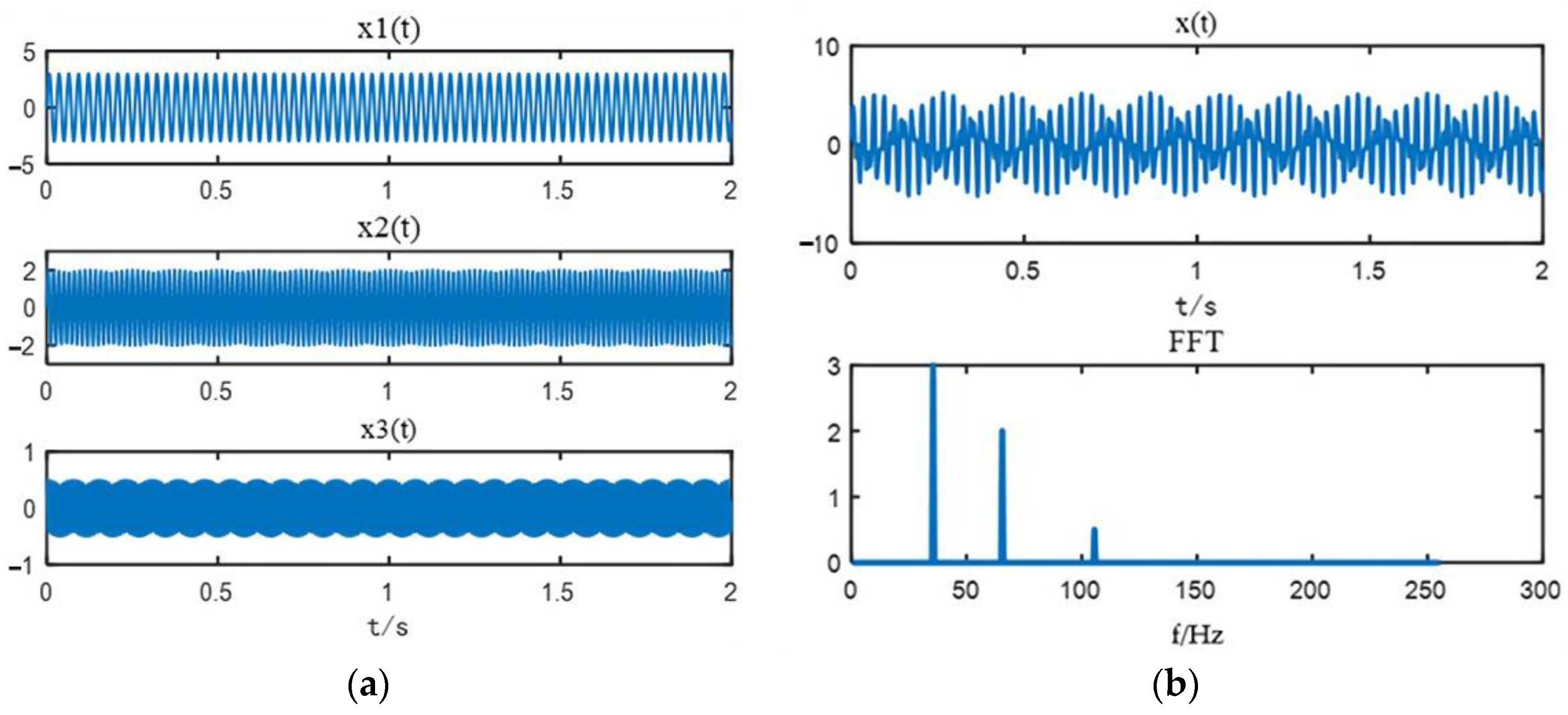
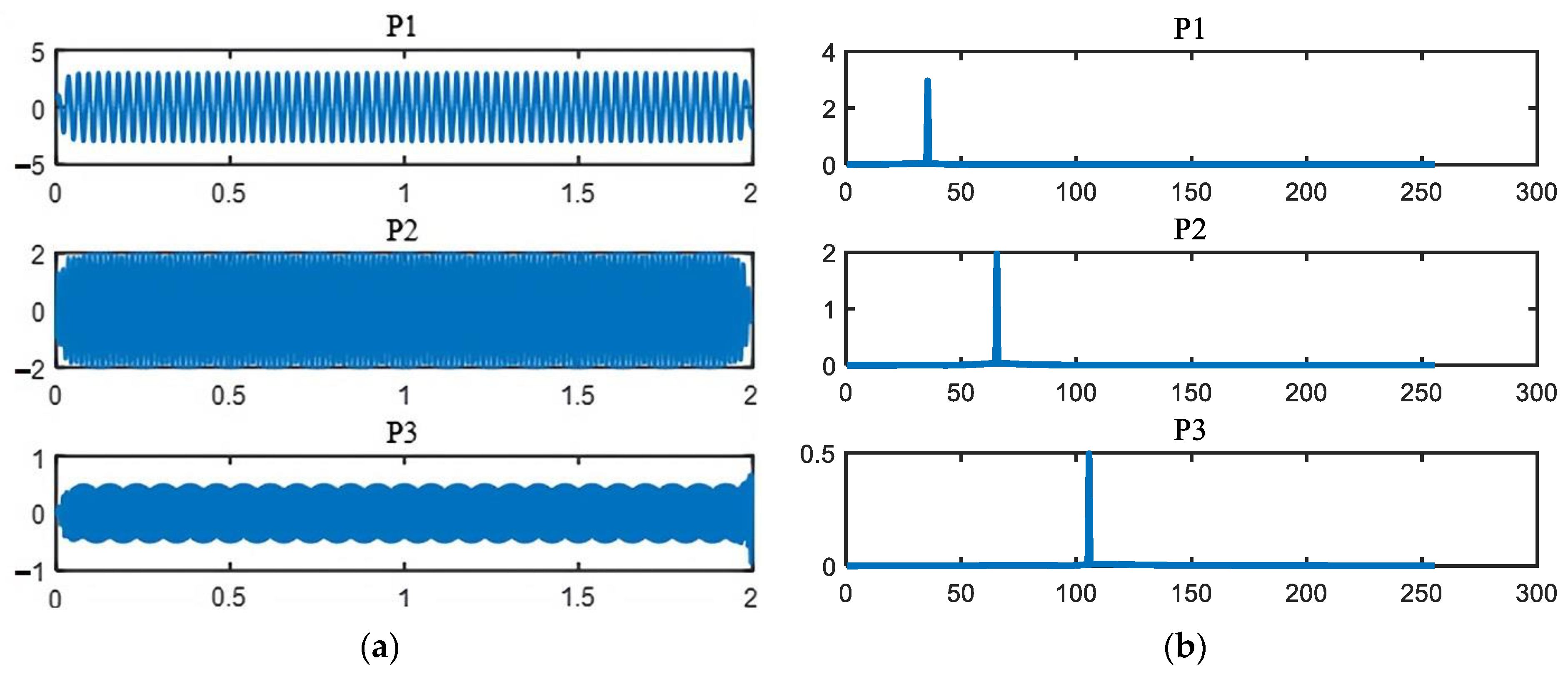
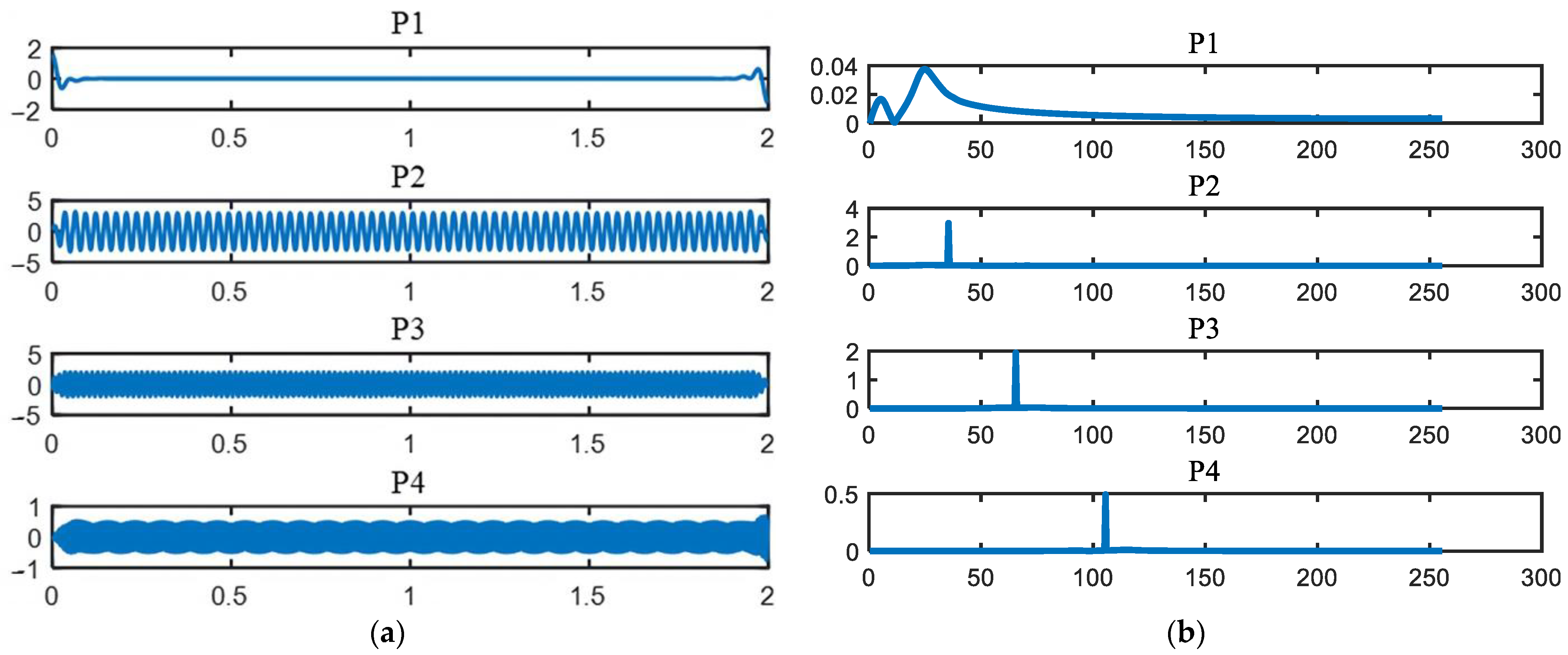
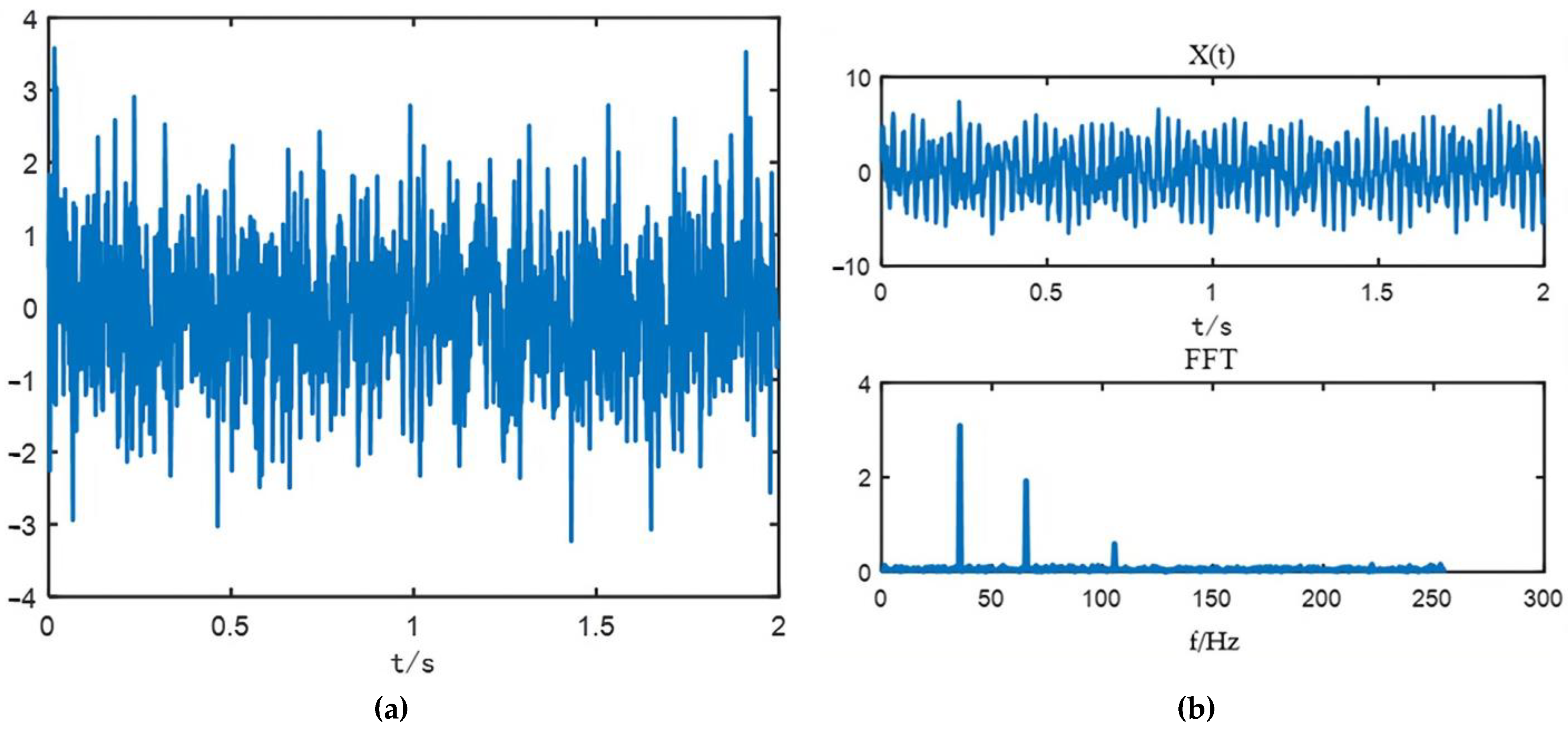
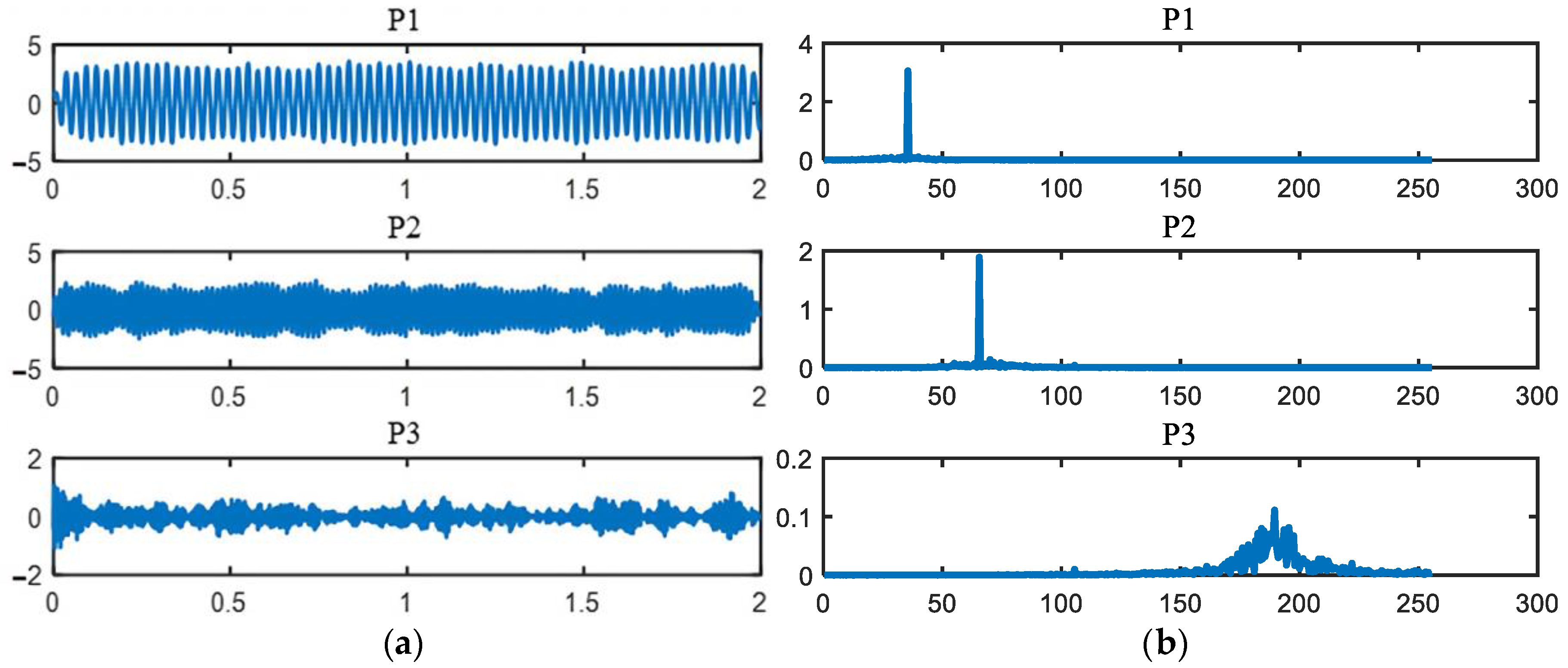
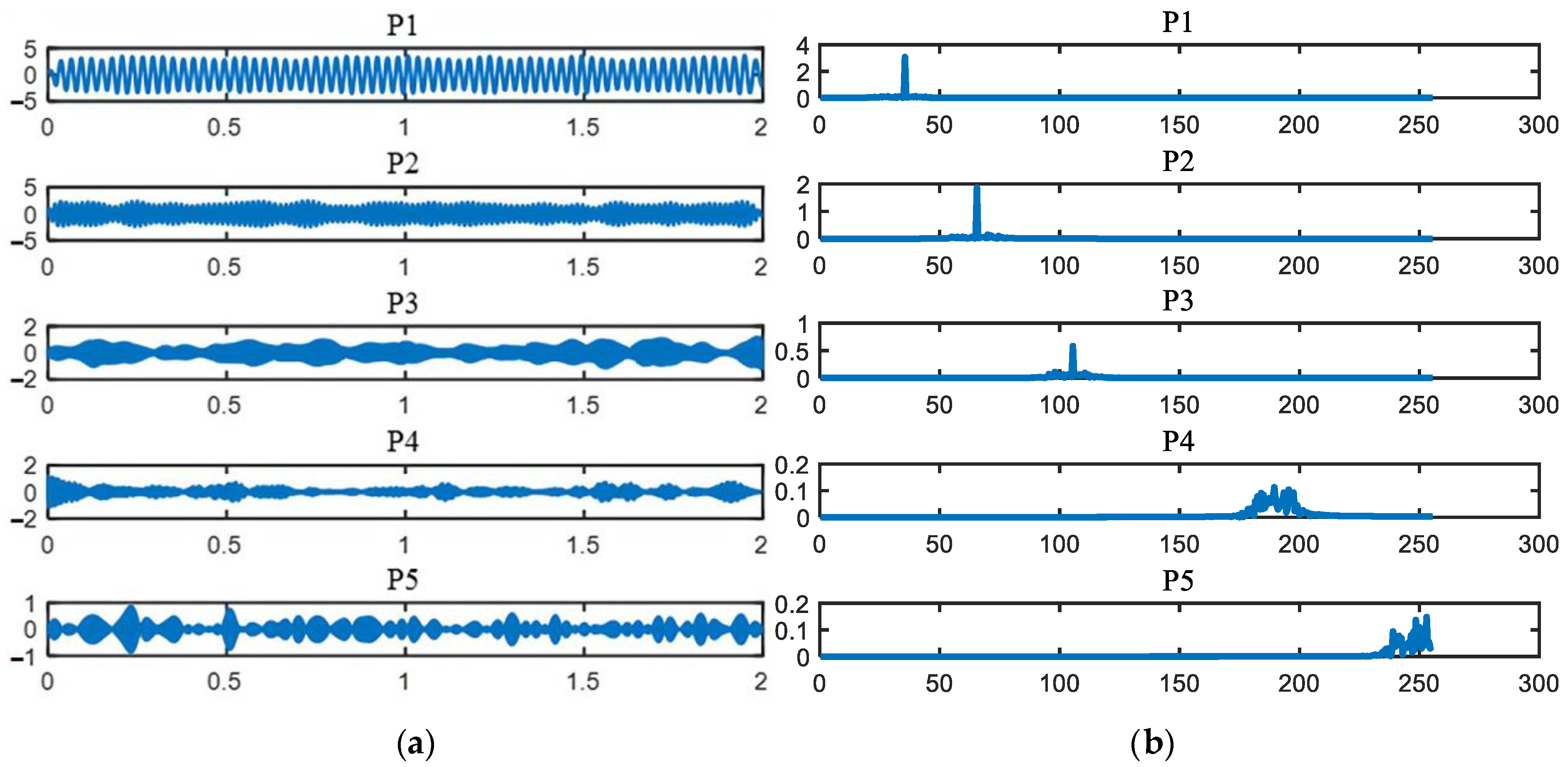
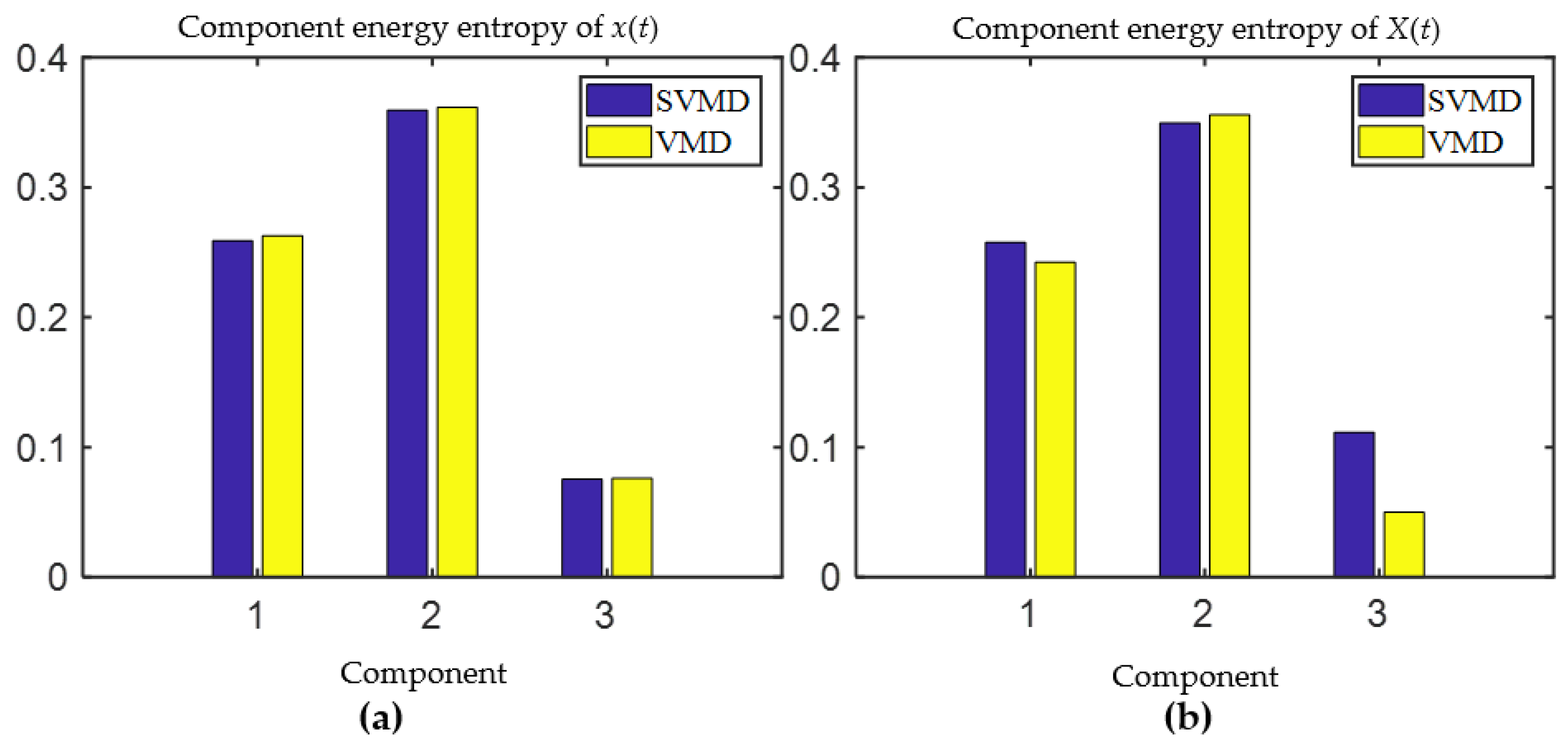
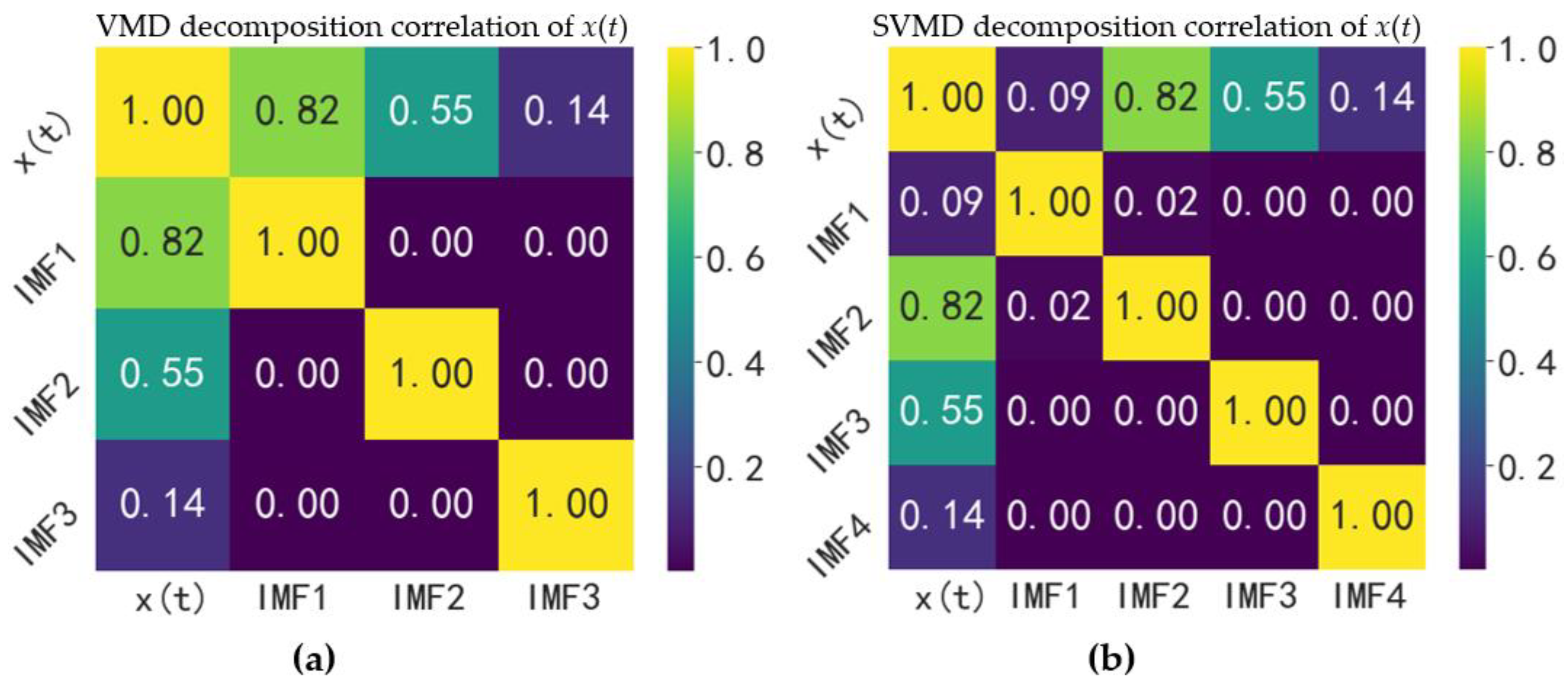
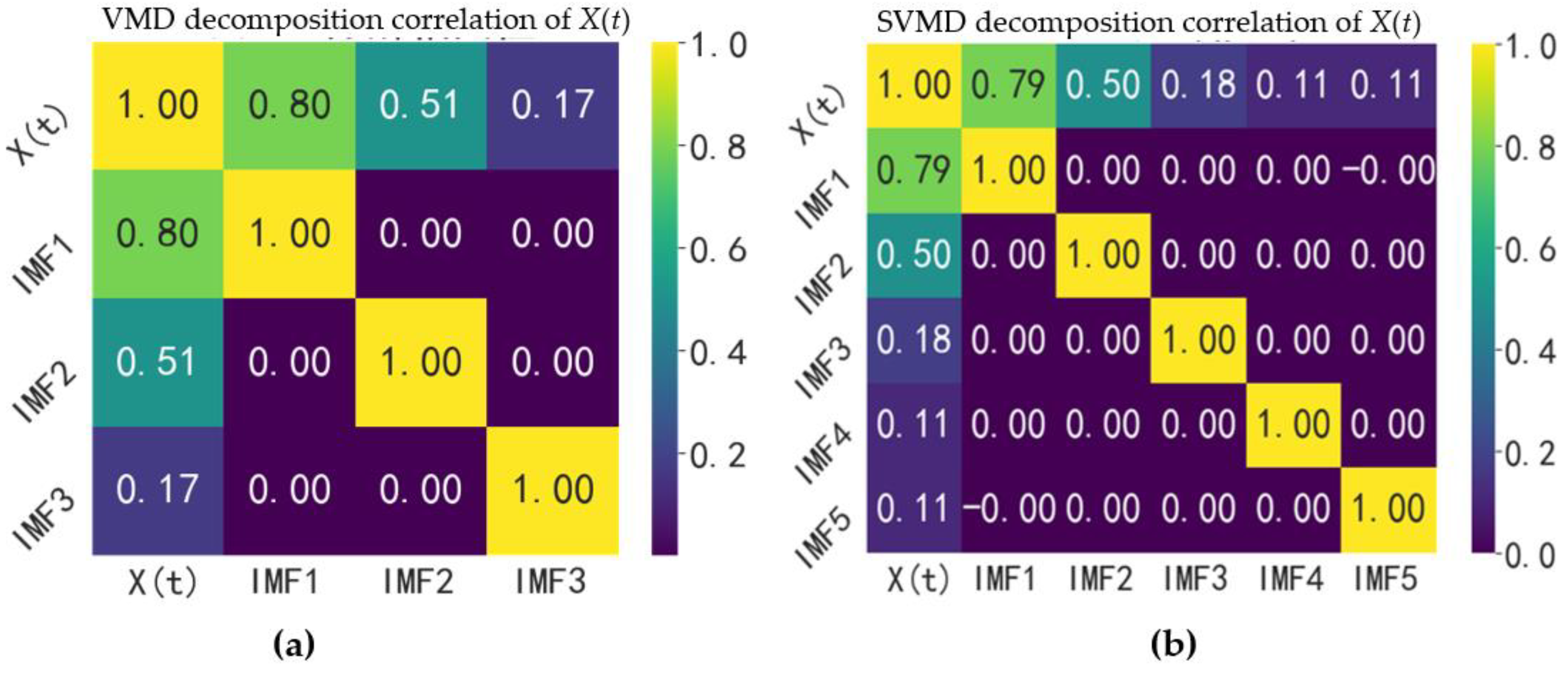
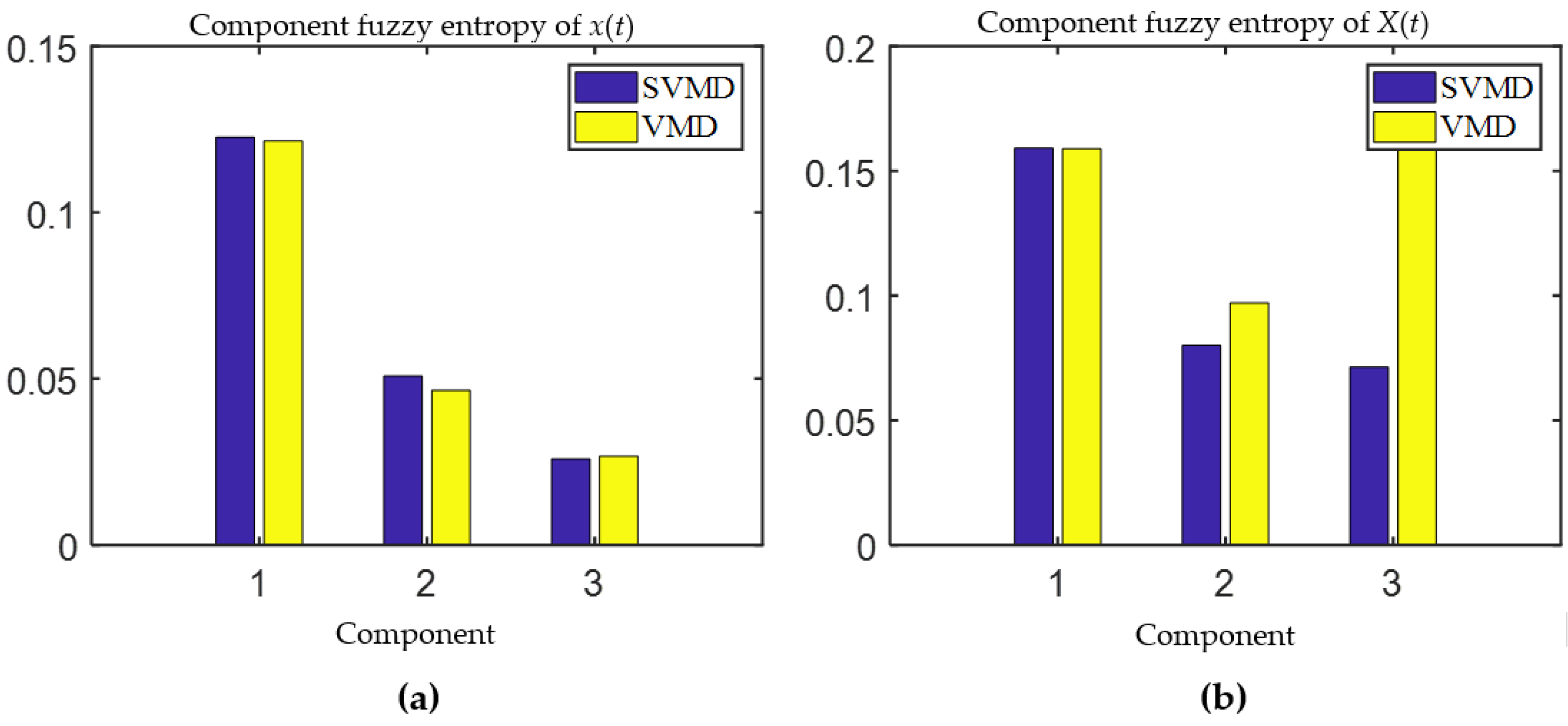
2.3. Simulated Signal Analysis
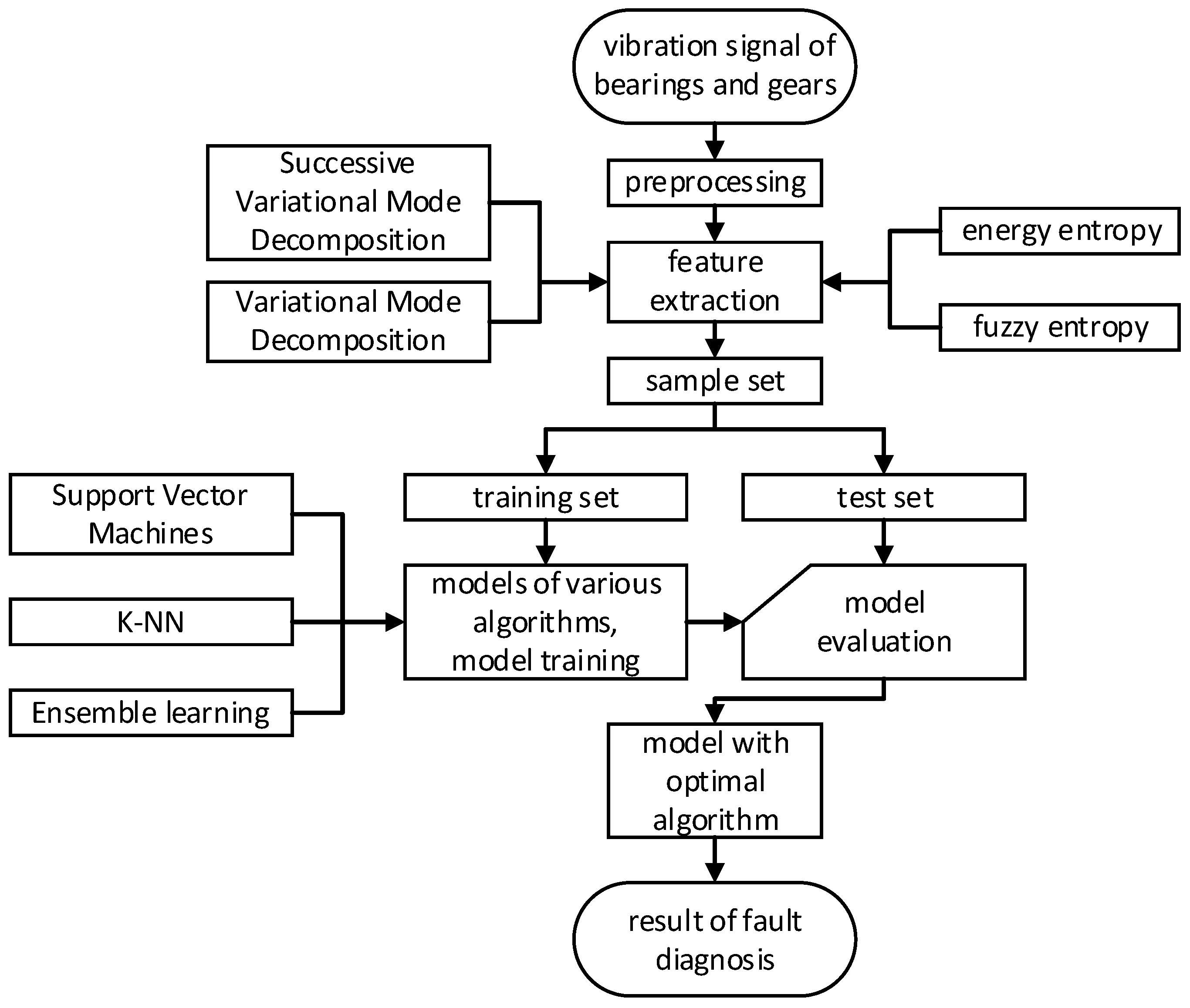
3. Fault Feature-Extraction Method
3.1. Energy Entropy
3.2. Fuzzy Entropy
- (1)
- The sequence is formed as dimensional vector, as shown in Equation (8):where , , , is the mean of vector .
- (2)
- Calculate the maximum amount of the distance difference between the vectors and , as shown in Equation (9).
- (3)
- Calculate the similarity , which is defined by the exponential function , as shown in Equation (10):where is the fuzzy-affiliation function of and , and and are the gradient and the width of its boundary, respectively.
- (4)
- Define ; the result is shown in Equation (11):where the affiliation function , and is the similarity-tolerance limit.
- (5)
- Solve the fuzzy-entropy value of for the infinite value, as shown in Equation (12).
4. Experimental Analysis
4.1. SEU Dataset Introduction
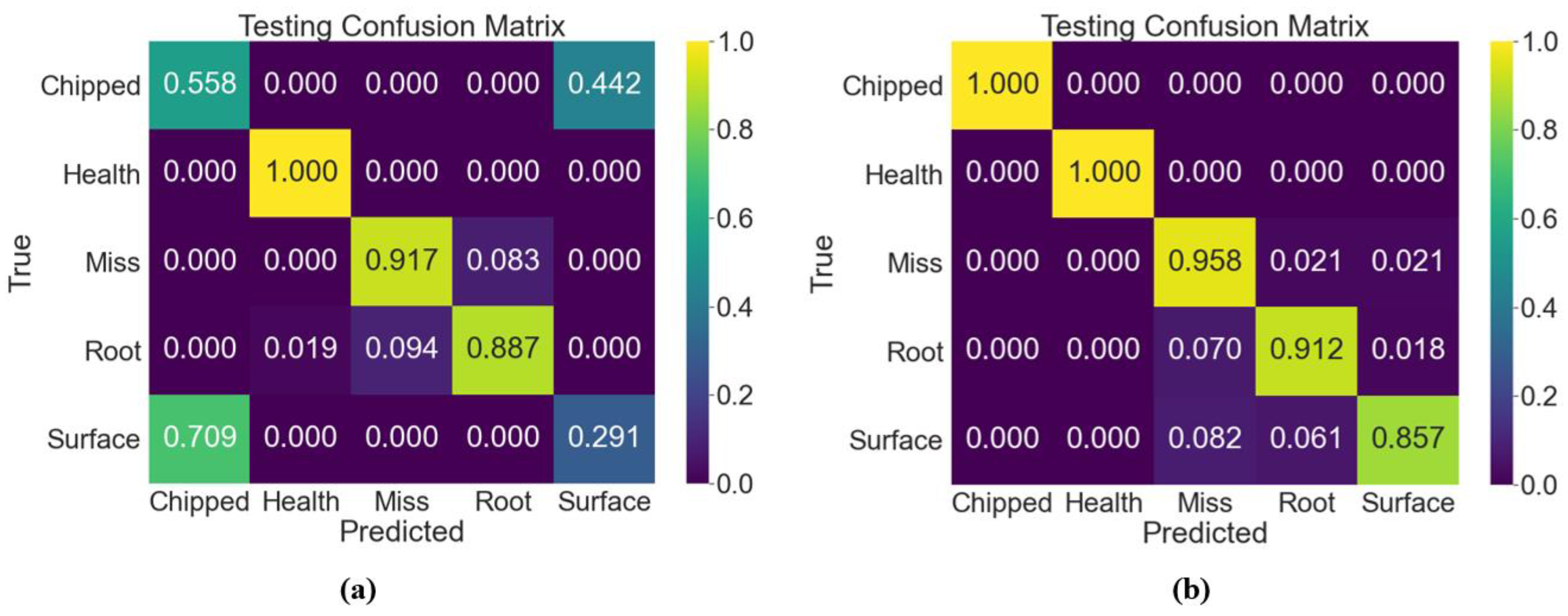
4.2. Analytical Comparison
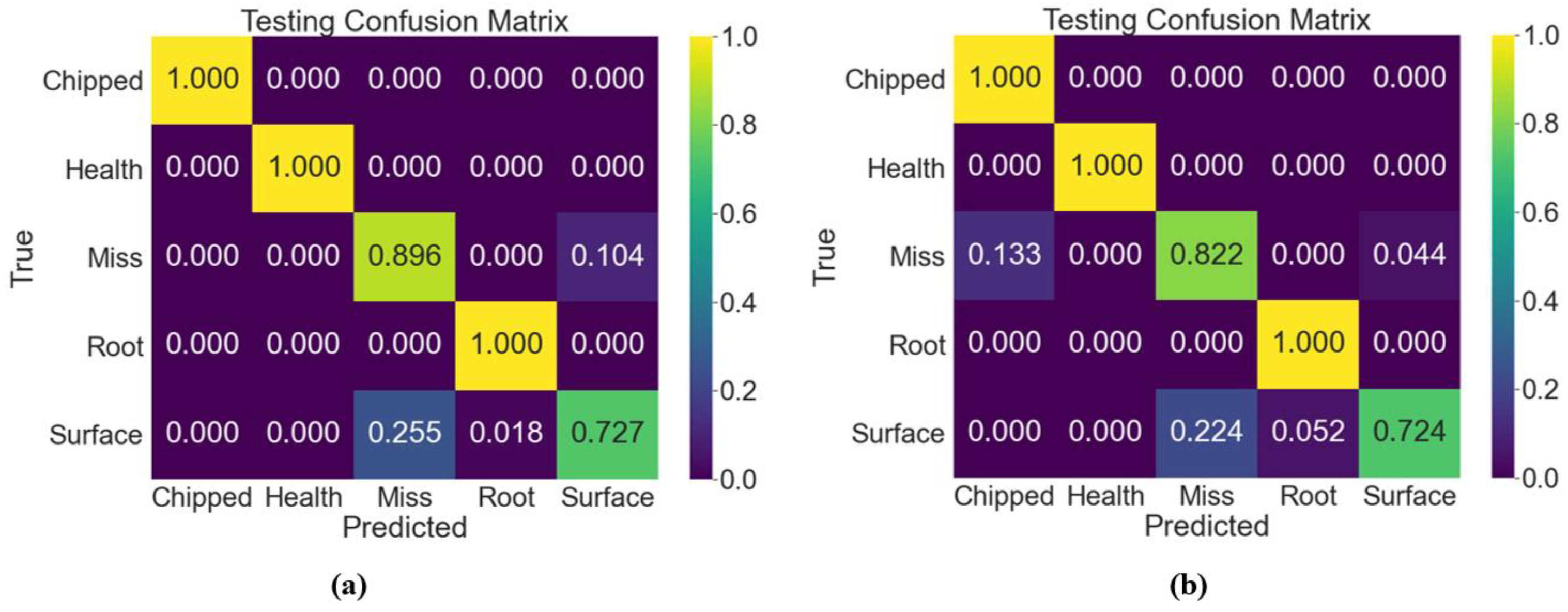
4.3. Additional Dataset Validation
5. Discussion and Open Issues
5.1. Classification-Model Design
5.2. Research Limitations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Trizoglou, P.; Liu, X.; Lin, Z. Fault detection by an ensemble framework of Extreme Gradient Boosting (XGBoost) in the operation of offshore wind turbines. Renew. Energy 2021, 179, 945–962. [Google Scholar] [CrossRef]
- Liu, J.; Yang, G.; Li, X.; Hao, S.; Guan, Y.; Li, Y. A deep generative model based on CNN-CVAE for wind turbine condition monitoring. Meas. Sci. Technol. 2023, 34, 035902. [Google Scholar] [CrossRef]
- Zhao, H.; Yang, X.; Chen, B.; Chen, H.; Deng, W. Bearing fault diagnosis using transfer learning and optimized deep belief network. Meas. Sci. Technol. 2022, 33, 065009. [Google Scholar] [CrossRef]
- Xie, T.; Xu, Q.; Jiang, C.; Lu, S.; Wang, X. The fault frequency priors fusion deep learning framework with application to fault diagnosis of offshore wind turbines. Renew. Energy 2023, 202, 143–153. [Google Scholar] [CrossRef]
- Vukelic, G.; Pastorcic, D.; Vitzentin, G.; Bozic, Z. Failure investigation of a crane gear damage. Eng. Fail. Anal. 2020, 115, 104613. [Google Scholar] [CrossRef]
- Yang, F.; Huang, D.; Li, D.; Zhao, Y.; Lin, S.; Muyeen, S.M. A novel convolutional network with a self-adaptation high-pass filter for fault diagnosis of wind turbine gearboxes. Meas. Sci. Technol. 2023, 34, 025024. [Google Scholar] [CrossRef]
- Das, S.; Prusty, B.R.; Bingi, K. Review of adaptive decomposition-based data preprocessing for renewable generation rich power system applications. J. Renew. Sustain. Energy 2021, 13, 062703. [Google Scholar] [CrossRef]
- Yu, K.; Lin, T.R.; Tan, J.; Ma, H. An adaptive sensitive frequency band selection method for empirical wavelet transform and its application in bearing fault diagnosis. Measurement 2019, 134, 375–384. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, A.; Song, Y.; Ma, G.; Bai, X.; Guo, Y. Application of Improved Robust Local Mean Decomposition and Multiple Disturbance Multi-Verse Optimizer-Based MCKD in the Diagnosis of Multiple Rolling Element Bearing Faults. Machines 2022, 10, 883. [Google Scholar] [CrossRef]
- Babu, T.N.; Devendiran, S.; Aravind, A.; Rakesh, A.; Jahzan, M. Fault Diagnosis on Journal Bearing Using Empirical Mode Decomposition. Mater. Today-Proc. 2018, 5, 12993–13002. [Google Scholar] [CrossRef]
- Vamsi, I.; Sabareesh, G.R.; Vaibhav, S. Integrated Vibro-Acoustic Analysis and Empirical Mode Decomposition for Fault Diagnosis of Gears in a Wind Turbine. Procedia Struct. Integr. 2019, 14, 937–944. [Google Scholar]
- Xiong, J.; Chen, K.; Cen, J.; Wang, Q.; Liu, X. Application of multi-kernel relevance vector machine and data pre-processing by complementary ensemble empirical mode decomposition and mutual dimensionless in fault diagnosis. Meas. Sci. Technol. 2022, 33, 115018. [Google Scholar] [CrossRef]
- Hoseinzadeh, M.S.; Khadem, S.E.; Sadooghi, M.S. Quantitative diagnosis for bearing faults by improving ensemble empirical mode decomposition. ISA Trans. 2018, 83, 261–275. [Google Scholar] [CrossRef]
- Sahu, P.K.; Rain, R.N. Fault Diagnosis of Rolling Bearing Based on an Improved Denoising Technique Using Complete Ensemble Empirical Mode Decomposition and Adaptive Thresholding Method. J. Vib. Eng. Technol. 2023, 11, 513–535. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, Z.; Chen, B.; Zhang, W.; Huang, G. An improved complementary ensemble empirical mode decomposition with adaptive noise and its application to rolling element bearing fault diagnosis. ISA Trans. 2019, 91, 218–234. [Google Scholar] [CrossRef]
- Wang, L.M.; Shao, Y.M. Fault feature extraction of rotating machinery using a reweighted complete ensemble empirical mode decomposition with adaptive noise and demodulation analysis. Mech. Syst. Signal Process. 2020, 138, 106545. [Google Scholar] [CrossRef]
- Ma, J.; Zhuo, S.; Li, C.; Zhan, L.; Zhang, G. An Enhanced Intrinsic Time-Scale Decomposition Method Based on Adaptive Levy Noise and Its Application in Bearing Fault Diagnosis. Symmetry 2021, 13, 617. [Google Scholar] [CrossRef]
- Pazoki, M.; Chaitanya, B.K.; Yadav, A. A new wave-based fault detection scheme during power swing. Electr. Power Syst. Res. 2023, 246, 109077. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, G.; Liu, C.; Chen, X. Study on planetary gear fault diagnosis based on variational mode decomposition and deep neural networks. Measurement 2018, 130, 94–104. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, J.; Hu, B.; Tang, J. Intelligent fault diagnosis of rolling bearings using variational mode decomposition and self-organizing feature map. J. Vib. Control 2020, 26, 1886–1897. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Y.; Li, S.; Chen, Y. A Review of Variational Mode Decomposition in Seismic Data Analysis. Surv. Geophys. 2022, 44, 323–355. [Google Scholar] [CrossRef]
- Li, C.; Liu, Y.; Liao, Y. An Improved Parameter-Adaptive Variational Mode Decomposition Method and Its Application in Fault Diagnosis of Rolling Bearings. Shock Vib. 2021, 2021, 2969488. [Google Scholar] [CrossRef]
- Gai, J.; Shen, J.; Hu, Y.; Wang, H. An integrated method based on hybrid grey wolf optimizer improved variational mode decomposition and deep neural network for fault diagnosis of rolling bearing. Measurement 2020, 162, 107901. [Google Scholar] [CrossRef]
- Yan, X.; Jia, M. Bearing fault diagnosis via a parameter-optimized feature mode decomposition. Measurement 2022, 203, 112016. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Ahmad, Z.; Kim, J.-M. Gearbox Fault Identification Framework Based on Novel Localized Adaptive Denoising Technique, Wavelet-Based Vibration Imaging, and Deep Convolutional Neural Network. Appl. Sci. 2021, 11, 7575. [Google Scholar] [CrossRef]
- Ahmad, Z.; Nguyen, T.-K.; Ahmad, S.; Nguyen, C.D.; Kim, J.-M. Multistage Centrifugal Pump Fault Diagnosis Using Informative Ratio Principal Component Analysis. Sensors 2022, 22, 179. [Google Scholar] [CrossRef]
- Nazari, M.; Sakhaei, S.M. Successive variational mode decomposition. Signal Process. 2020, 174, 107610. [Google Scholar] [CrossRef]
- Nazari, M.; Sakhaei, S.M. Variational Mode Extraction: A New Efficient Method to Derive Respiratory Signals from ECG. IEEE J. Biomed. Health Inform. 2018, 22, 1059–1067. [Google Scholar] [CrossRef]
- Chen, X.; Yang, Y.; Cui, Z.; Shen, J. Vibration fault diagnosis of wind turbines based on variational mode decomposition and energy entropy. Energy 2019, 174, 1100–1109. [Google Scholar] [CrossRef]
- Jiao, J.; Yue, J.; Pei, D. Feature Enhancement Method of Rolling Bearing Based on K-Adaptive VMD and RBF-Fuzzy Entropy. Entropy 2022, 24, 197. [Google Scholar] [CrossRef] [PubMed]
- Shao, S.; McAleer, S.; Yan, R.; Baldi, P. Highly Accurate Machine Fault Diagnosis Using Deep Transfer Learning. IEEE Trans. Ind. Inform. 2019, 15, 2446–2455. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Cui, M.; Wang, Y.; Lin, X.; Zhong, M. Fault Diagnosis of Rolling Bearings Based on an Improved Stack Autoencoder and Support Vector Machine. IEEE Sens. J. 2021, 21, 4927–4937. [Google Scholar] [CrossRef]
- Yu, T.; Chen, X.; Yan, W.; Xu, Z.; Ye, M. Leak detection in water distribution systems by classifying vibration signals. Mech. Syst. Signal Process. 2023, 185, 109810. [Google Scholar] [CrossRef]
- Albaqami, H.; Hassan, G.M.; Subasi, A.; Datta, A. Automatic detection of abnormal EEG signals using wavelet feature extraction and gradient boosting decision tree. Biomed. Signal Process. Control 2021, 70, 102957. [Google Scholar] [CrossRef]
- Hosseinpour-Zarnaq, M.; Omid, M.; Biabani-Aghdam, E. Fault diagnosis of tractor auxiliary gearbox using vibration analysis and random forest classifier. Inf. Process. Agric. 2022, 9, 60–67. [Google Scholar] [CrossRef]
- Zhao, R.; Wang, D.; Yan, R.; Mao, K.; Shen, F.; Wang, J. Machine Health Monitoring Using Local Feature-Based Gated Recurrent Unit Networks. IEEE Trans. Ind. Electron. 2018, 65, 1539–1548. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal-Decomposition Method | Running Time (s) | Decomposition Fraction (pcs) | Problem |
|---|---|---|---|
| EMD | 1.270 | 7 | Mode mixing |
| LMD | 1.857 | 4 | Mode mixing |
| ITD | 1.666 | 5 | Mode mixing |
| VMD | 1.100 | 3 | None |
| SVMD | 1.277 | 4 | One more invalid component |
| Signal-Decomposition Method | Running Time (s) | Decomposition Fraction (pcs) | Problem |
|---|---|---|---|
| EMD | 1.692 | 9 | Mode mixing |
| LMD | 2.077 | 5 | All three eigenfrequencies are in the same component |
| ITD | 1.940 | 7 | Mode mixing |
| VMD | 1.558 | 3 | The third characteristic frequency is not effectively separated |
| SVMD | 1.674 | 5 | Invalid fraction exists |
| Operation Conditions | Dataset | Data Length | Fault Type |
|---|---|---|---|
| I | Ball_20_0 | 1,048,560 | Rolling-body failure |
| Comb_20_0 | 1,048,560 | Inner-ring and outer-ring mixed failure | |
| Health_20_0 | 1,048,560 | Normal condition | |
| Inner_20_0 | 1,048,560 | Inner-ring failure | |
| Outer_20_0 | 1,048,560 | Outer-ring failure | |
| II | Ball_30_2 | 1,048,560 | Rolling-body failure |
| Comb_30_2 | 1,048,560 | Inner-ring and outer-ring mixed failure | |
| Health_30_2 | 1,048,560 | Normal condition | |
| Inner_30_2 | 1,048,560 | Inner-ring failure | |
| Outer_30_2 | 1,048,560 | Outer-ring failure |
| Operation Conditions | Dataset | Data Length | Fault Type |
|---|---|---|---|
| I | Chipped_20_0 | 1,048,560 | Broken-tooth failure |
| Health_20_0 | 1,048,560 | Normal condition | |
| Miss_20_0 | 1,048,560 | Missing-tooth failure | |
| Root_20_0 | 1,048,560 | Tooth-root failure | |
| Surface_20_0 | 1,048,560 | Tooth-surface failure | |
| II | Chipped_30_2 | 1,048,560 | Broken-tooth failure |
| Health_30_2 | 1,048,560 | Normal condition | |
| Miss_30_2 | 1,048,560 | Missing-tooth failure | |
| Root_30_2 | 1,048,560 | Tooth-root failure | |
| Surface_30_2 | 1,048,560 | Tooth-surface failure |
| Data | Gearbox Bearing Data of SEU | |||||||
|---|---|---|---|---|---|---|---|---|
| Operation Condition | Operation Condition I | Operation Condition II | ||||||
| Model | SVM | k-NN | RF | GBDT | SVM | k-NN | RF | GBDT |
| VMD energy entropy | 97.57% | 97.34% | 98.04% | 98.04% | 97.25% | 96.86% | 96.08% | 97.25% |
| SVMD energy entropy | 97.25% | 96.86% | 96.47% | 97.25% | 94.12% | 93.33% | 91.76% | 94.51% |
| VMD fuzzy entropy | 99.13% | 98.98% | 99.22% | 99.22% | 99.61% | 92.16% | 99.61% | 99.22% |
| SVMD fuzzy entropy | 93.96% | 99.22% | 99.22% | 99.22% | 94.90% | 97.25% | 95.69% | 95.29% |
| Algorithm | Component: Bearing | Component: Gear | |||
|---|---|---|---|---|---|
| 20-0 | 30-2 | 20-0 | 30-2 | ||
| Literature [36] | K-NN | 80.80% | 86.40% | 93.20% | 89.20% |
| SVM | 83.30% | 88.60% | 94.40% | 90.10% | |
| Our paper | SVMD fuzzy entropy + k-NN | 99.22% | 97.25% | 94.42% | 90.98% |
| SVMD energy entropy + SVM | 97.25% | 94.12% | 91.27% | 90.20% | |
| SVMD fuzzy entropy + RF | 99.22% | 95.69% | 96.02% | 93.33% | |
| SVMD fuzzy entropy + GBDT | 99.22% | 95.29% | 95.22% | 89.41% | |
| Operation Conditions | Medium–High Speed (1540 r/min) | High Speed (1788 r/min) | ||||||
|---|---|---|---|---|---|---|---|---|
| Model | SVM | KNN | RF | GBDT | SVM | KNN | RF | GBDT |
| VMD energy entropy | 98.40% | 98.53% | 98.53% | 97.44% | 98.53% | 98.53% | 98.17% | 97.44% |
| SVMD energy entropy | 98.17% | 95.60% | 95.24% | 94.14% | 94.46% | 97.42% | 94.46% | 94.10% |
| VMD fuzzy entropy | 94.56% | 98.40% | 98.53% | 98.17% | 96.70% | 98.90% | 91.58% | 95.97% |
| SVMD fuzzy entropy | 97.07% | 98.53% | 95.97% | 96.34% | 96.31% | 97.42% | 95.94% | 94.84% |
| Model | Applicable Data | Classification Problem | Training Time | Storage Space |
|---|---|---|---|---|
| SVM | Low-dimensional | Linear classification | Long | Low |
| KNN | Low-dimensional | Nonlinear classification | Short | High |
| RF | High-dimensional | Nonlinear classification | Long | Low |
| GBDT | High-dimensional | Nonlinear classification | Long | Low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Zhang, Y.; Li, G. Fault-Diagnosis Method for Rotating Machinery Based on SVMD Entropy and Machine Learning. Algorithms 2023, 16, 304. https://doi.org/10.3390/a16060304
Zhang L, Zhang Y, Li G. Fault-Diagnosis Method for Rotating Machinery Based on SVMD Entropy and Machine Learning. Algorithms. 2023; 16(6):304. https://doi.org/10.3390/a16060304
Chicago/Turabian StyleZhang, Lijun, Yuejian Zhang, and Guangfeng Li. 2023. "Fault-Diagnosis Method for Rotating Machinery Based on SVMD Entropy and Machine Learning" Algorithms 16, no. 6: 304. https://doi.org/10.3390/a16060304
APA StyleZhang, L., Zhang, Y., & Li, G. (2023). Fault-Diagnosis Method for Rotating Machinery Based on SVMD Entropy and Machine Learning. Algorithms, 16(6), 304. https://doi.org/10.3390/a16060304