
Influence of Magnetic Field on Sound Transmission Loss of the Unit Filled with Magnetorheological Fluid


Abstract
:1. Introduction
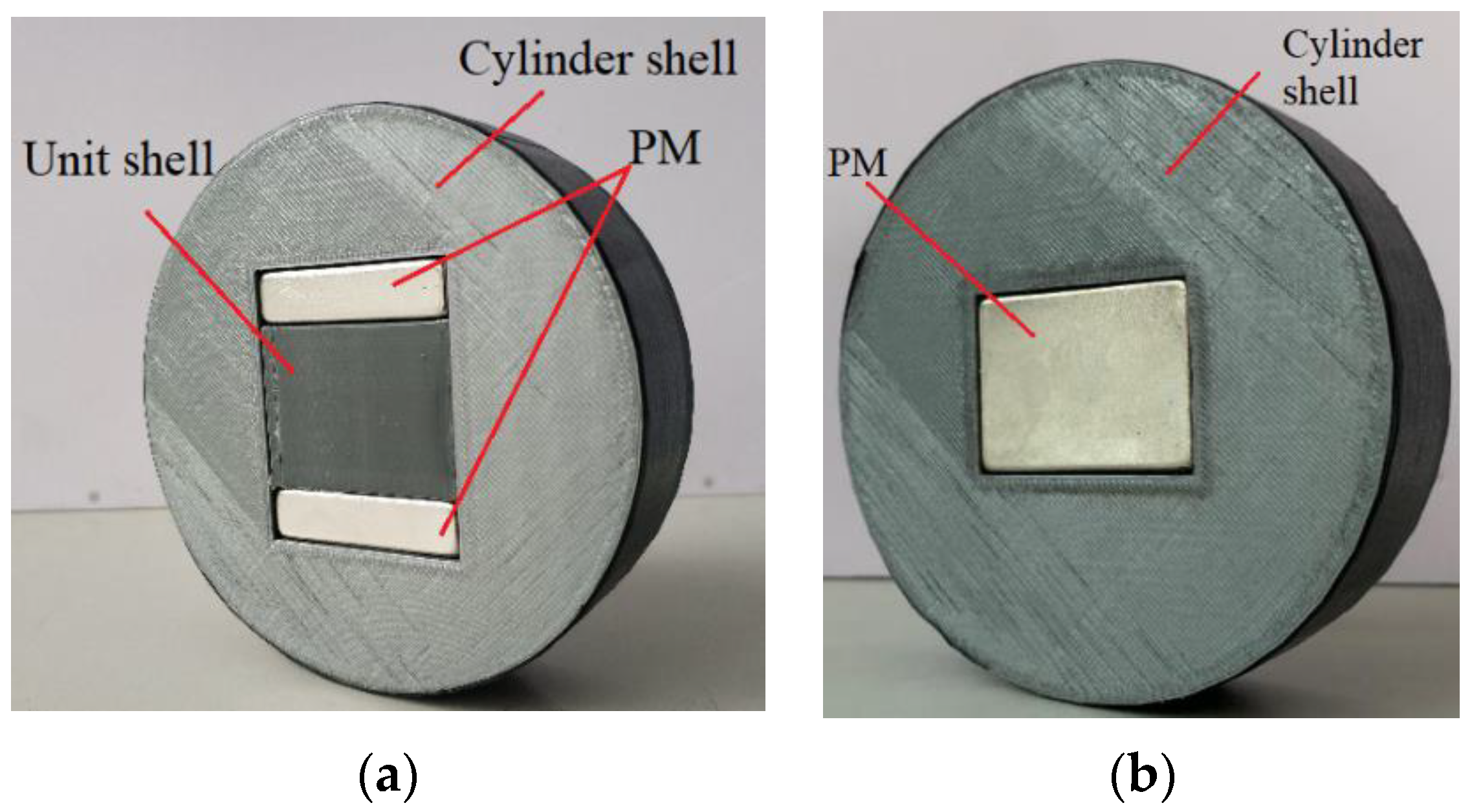
2. Preparation of the Test Samples
3. Experimental Study
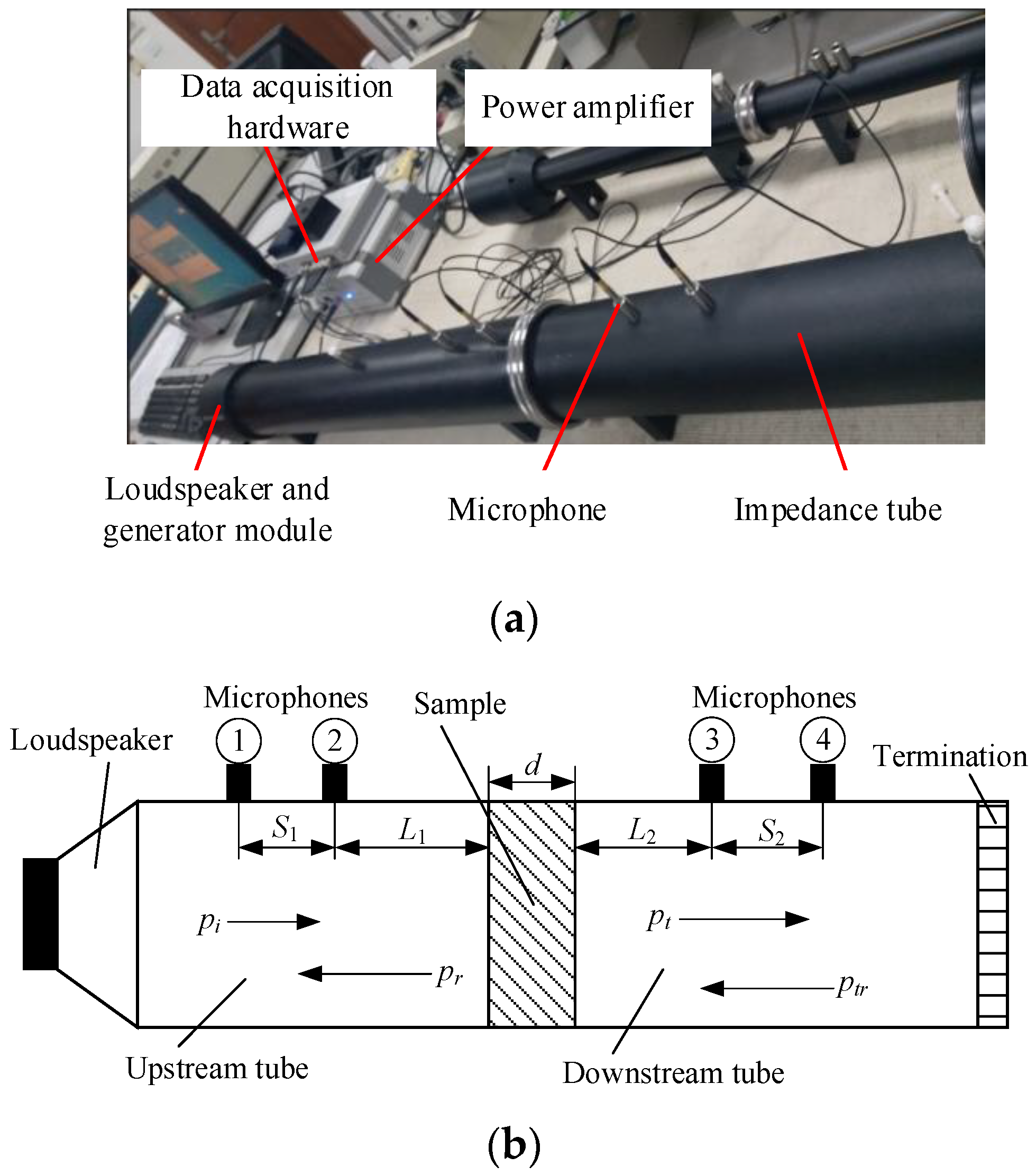
3.1. Description of the Experimental Setup
3.2. Experimental Procedures
4. Results and Discussion
4.1. Effect of the Magnetic Field Intensity
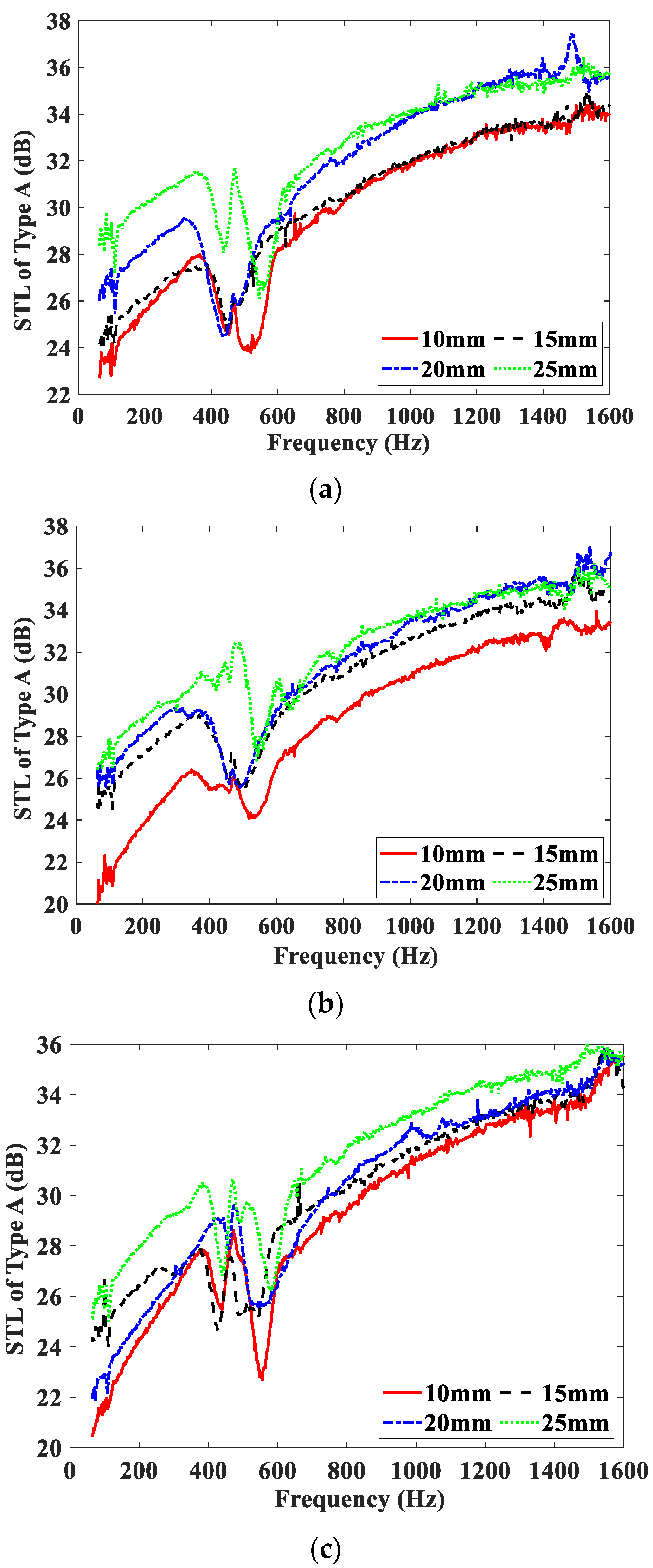
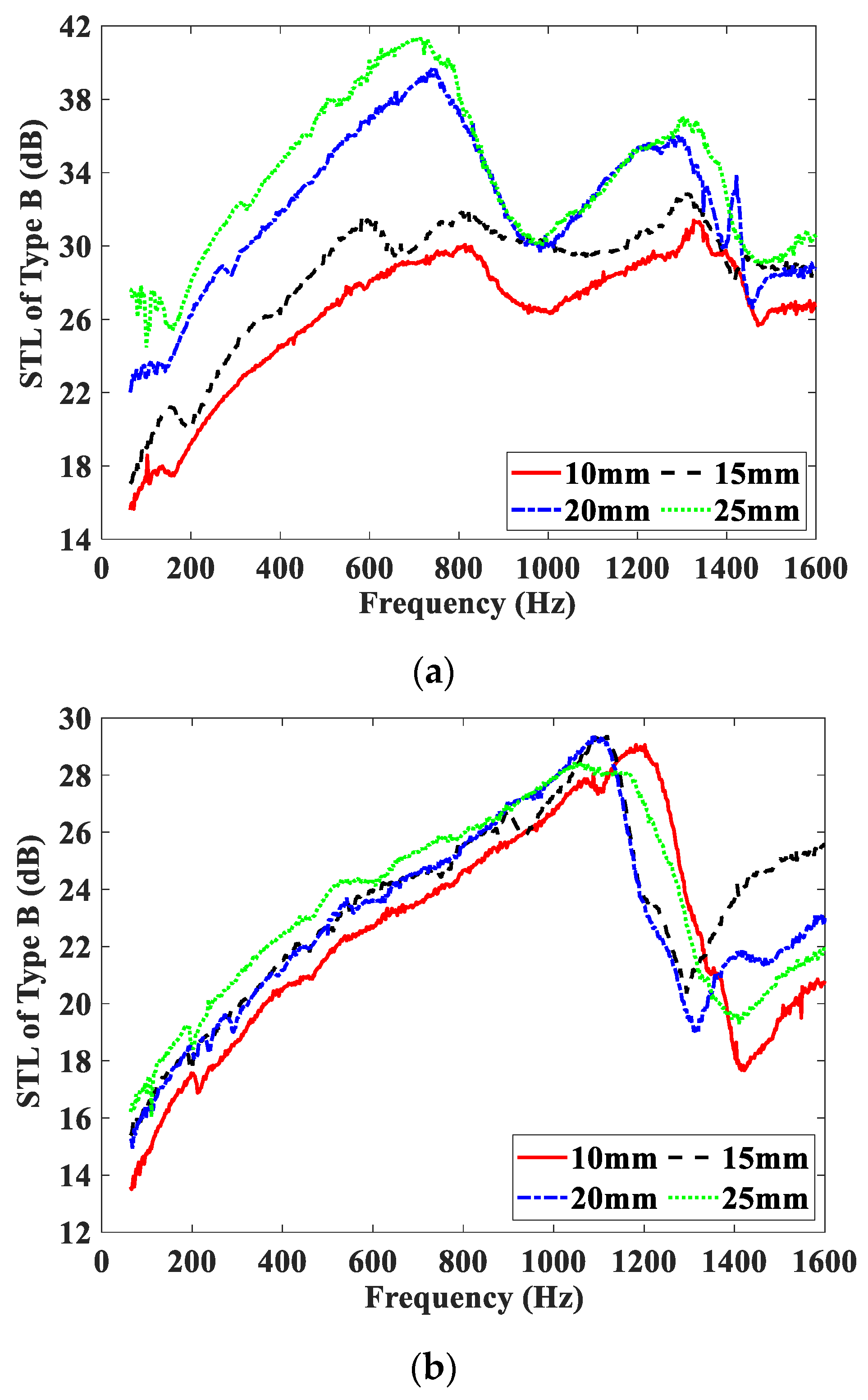
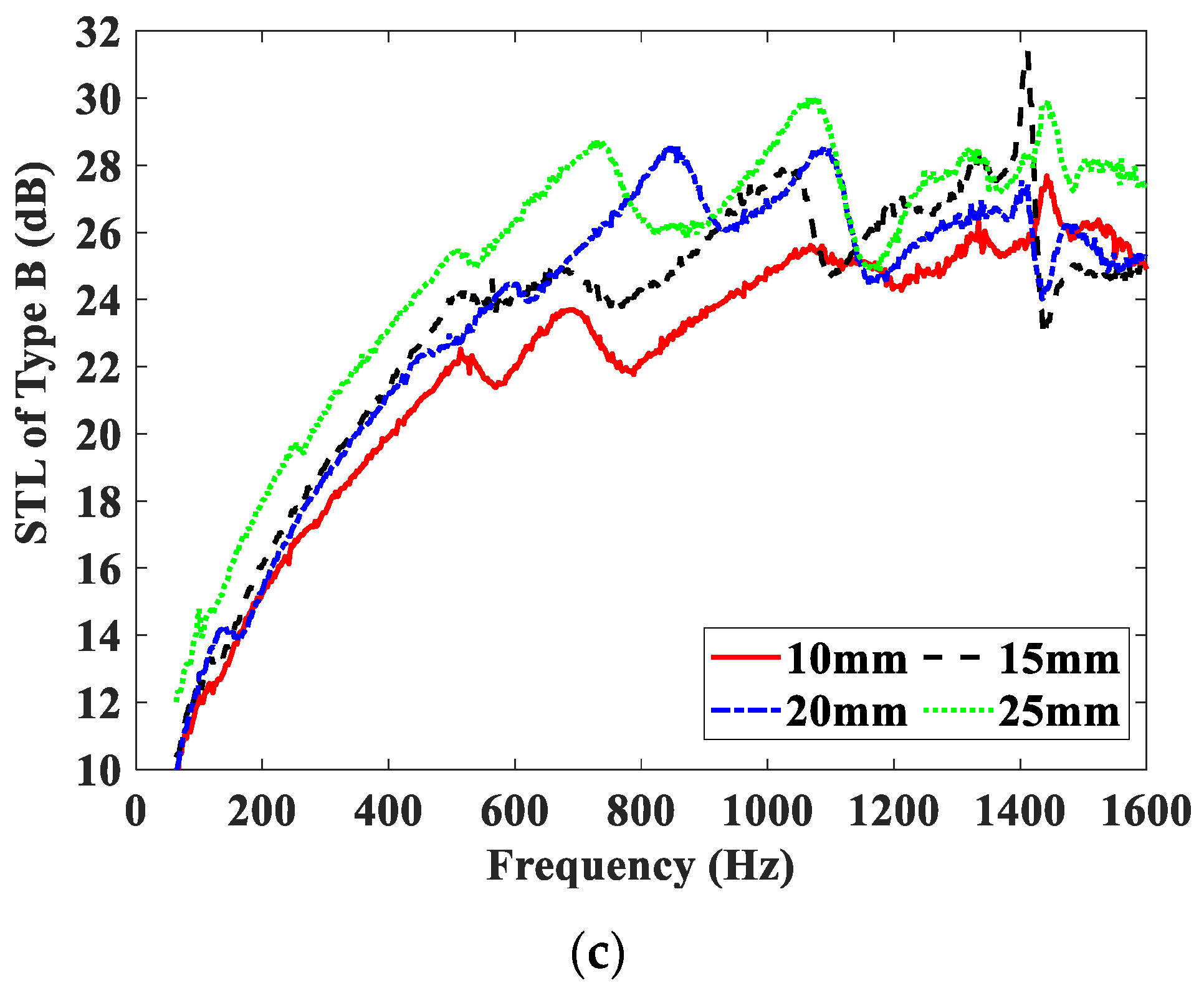
4.2. Effect of the Magnetic Field Direction
5. Conclusions and Future Work
- (1)
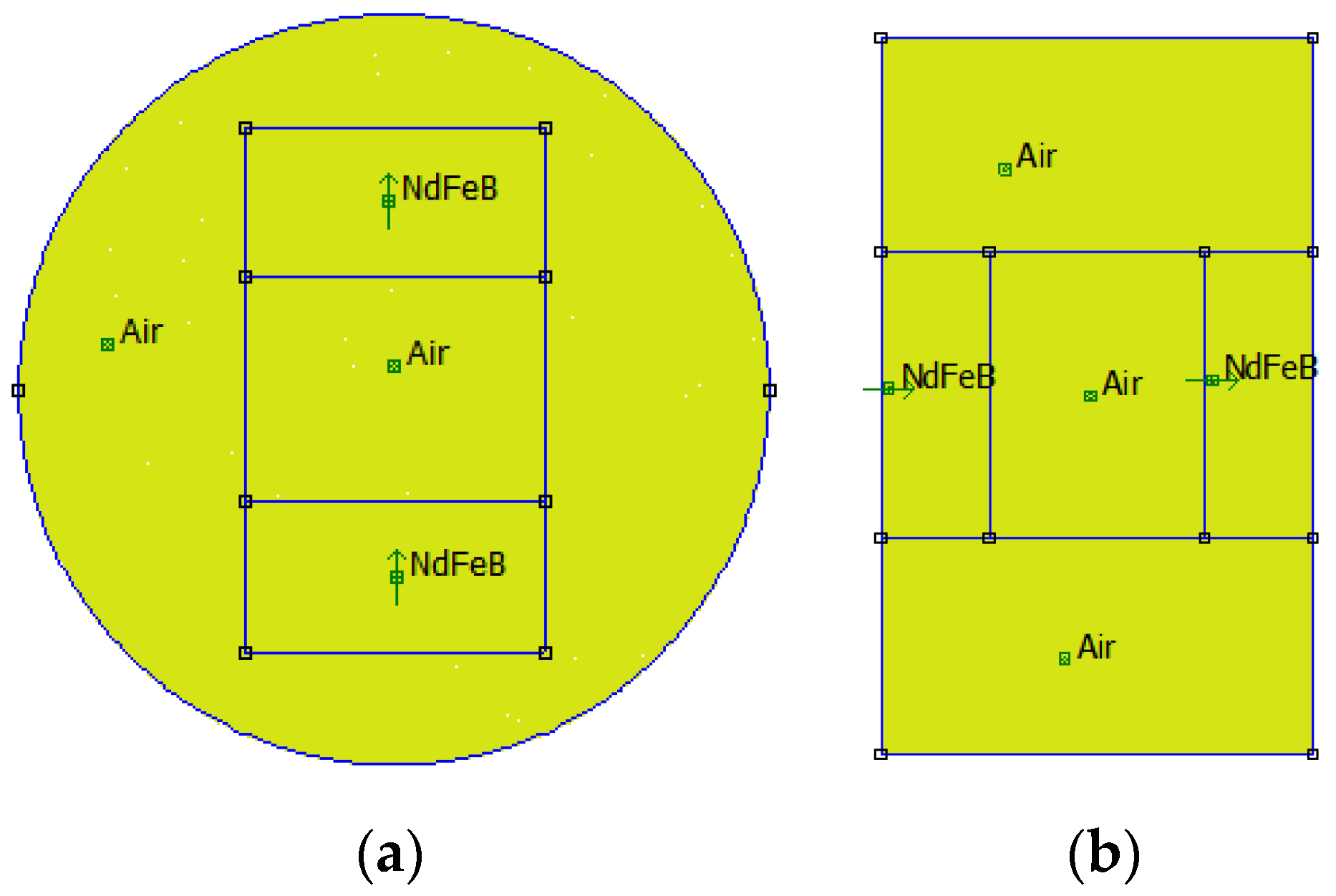
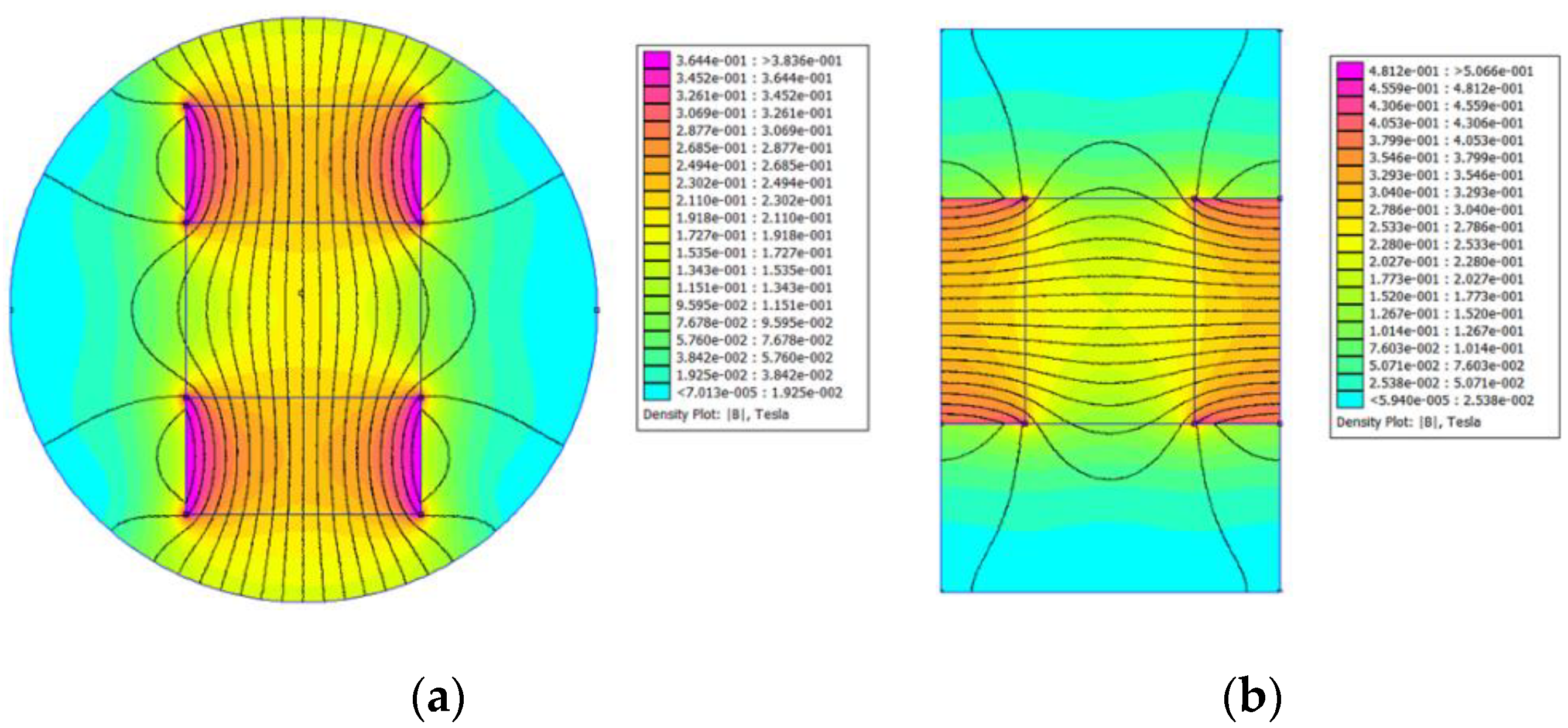
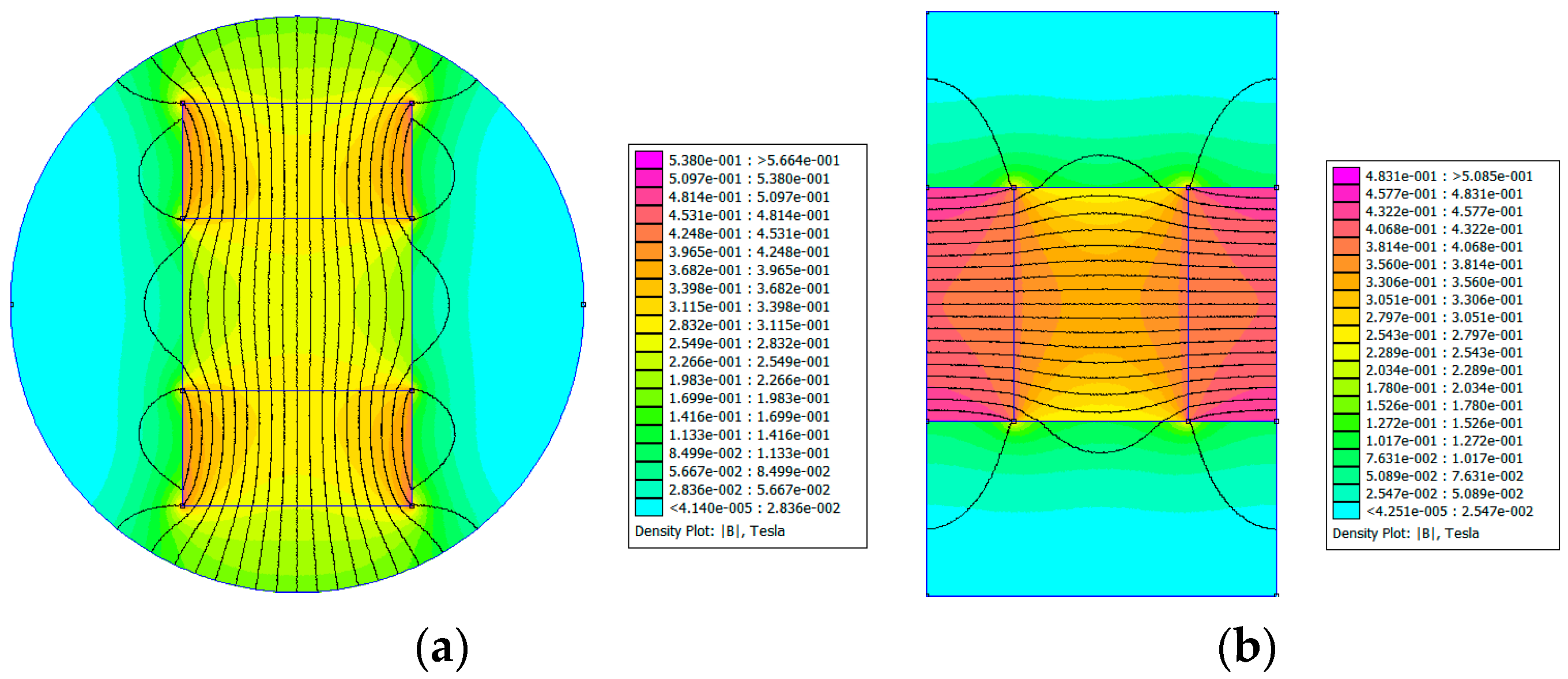
- The simulated distribution of the magnetic field intensity provided by the PMs showed that the magnetic field applied to the MRF was uniform.
- (2)
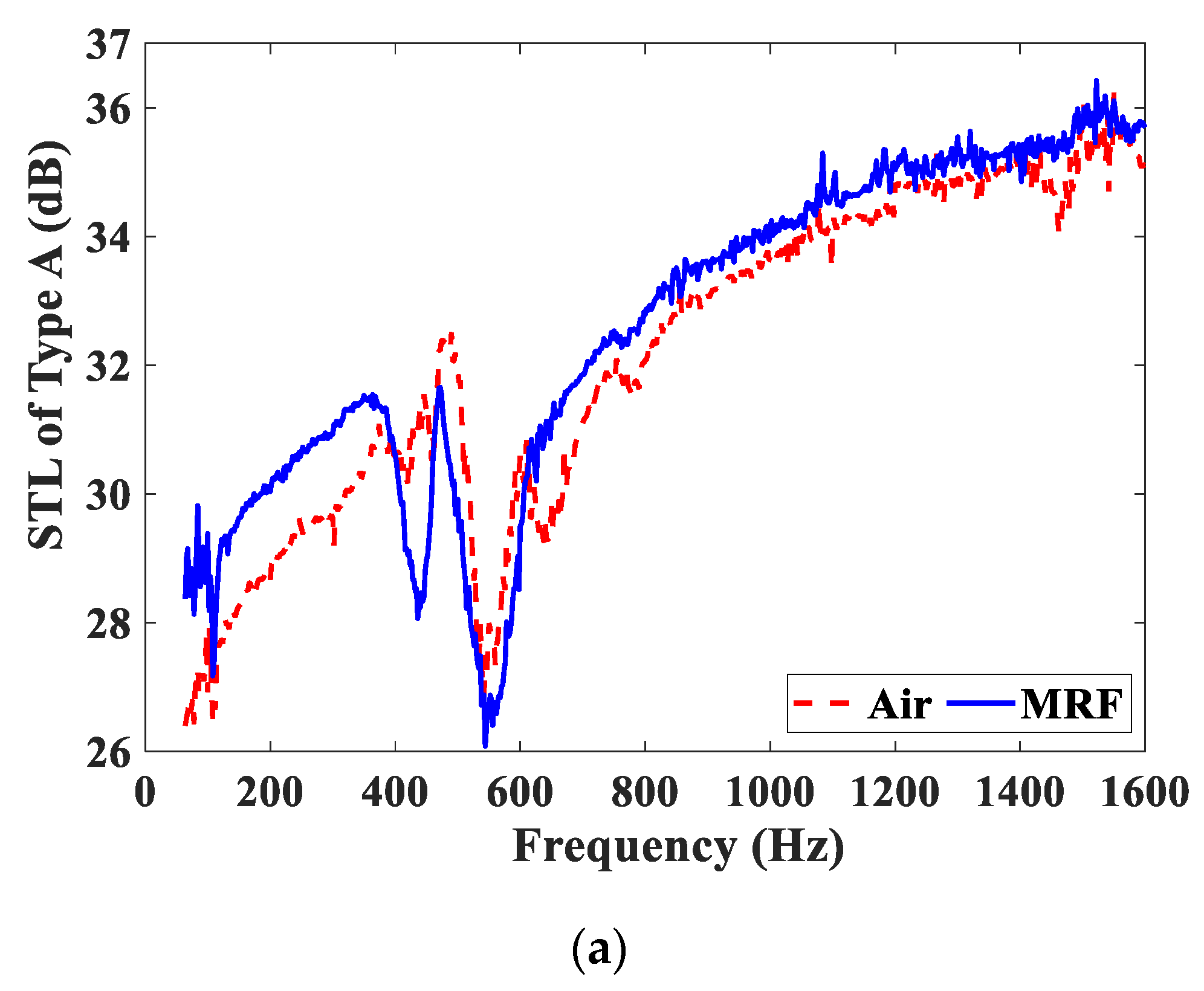
- The experimental results for the STL demonstrate that the magnetic field direction has a significant influence on the sound insulation performance of the MRF unit. When the magnetic field direction is perpendicular to the sound propagation direction, the MRF has no apparent advantages in terms of sound insulation performance over other media.
- (3)
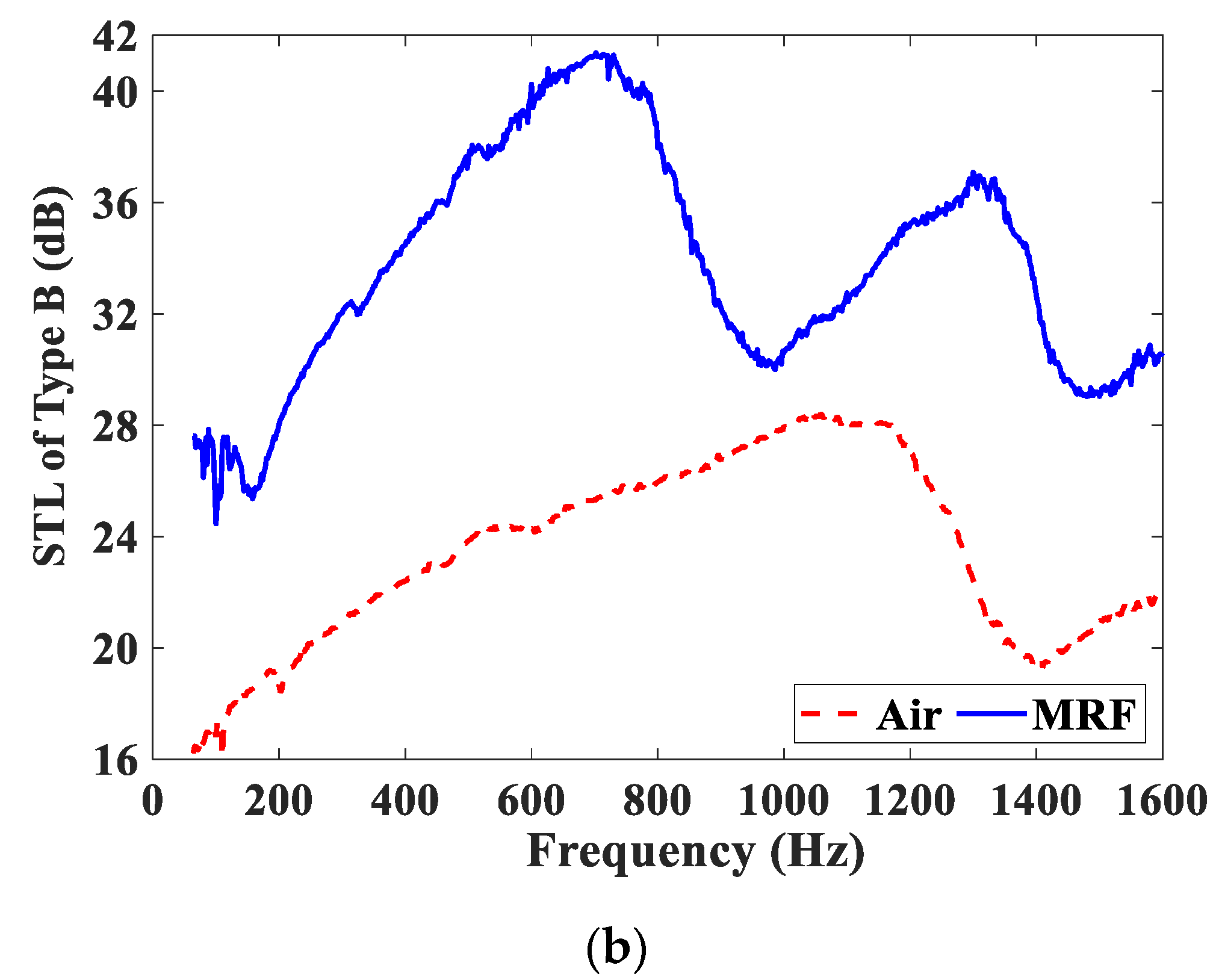
- When the magnetic field direction is parallel to the sound propagation direction, the MRF unit can obtain a significant STL at the low and middle frequencies. In addition, the STL of the MRF unit significantly increased with increasing magnetic field intensity. When the magnetic field intensity changed from 0.177 T to 0.277 T, the peak of the STL curves increased by approximately 15 dB (up to 60% variation). This means that MRFs can be used as a core material of sandwich structures to actively control their sound insulation performance at low and middle frequencies.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lu, L.; Yin, K.-L.; de Lamare, R.C.; Zheng, Z.; Yu, Y.; Yang, X.; Chen, B. A survey on active noise control in the past decade—Part I: Linear systems. Signal Process. 2021, 183, 108039. [Google Scholar] [CrossRef]
- Lu, L.; Yin, K.-L.; de Lamare, R.C.; Zheng, Z.; Yu, Y.; Yang, X.; Chen, B. A survey on active noise control in the past decade—Part II: Nonlinear systems. Signal Process. 2020, 181, 107929. [Google Scholar] [CrossRef]
- de Vicente, J.; Klingenberg, D.J.; Hidalgo-Alvarez, R. Magnetorheological fluids: A review. Soft Matter 2011, 7, 3701–3710. [Google Scholar] [CrossRef]
- Wang, H.; Bi, C.; Zhang, Y.; Zhang, L.; Zhou, F. Compressions of magnetorheological fluids under instantaneous magnetic field and constant area. Sci. Rep. 2021, 11, 8887. [Google Scholar] [CrossRef] [PubMed]
- Luo, B.; Yan, Q.; Huang, Z.; Pan, J.; Fu, Y. Machining method for controlling the behaviours of Bingham fluids in cluster magnetorheological polishing pads. Smart Mater. Struct. 2020, 30, 025002. [Google Scholar] [CrossRef]
- Liang, Y.; Alvarado, J.R.; Iagnemma, K.D.; Hosoi, A. Dynamic Sealing Using Magnetorheological Fluids. Phys. Rev. Appl. 2018, 10, 064049. [Google Scholar] [CrossRef]
- Shamieh, H.; Sedaghati, R. Multi-objective design optimization and control of magnetorheological fluid brakes for automotive applications. Smart Mater. Struct. 2017, 26, 125012. [Google Scholar] [CrossRef]
- Wang, C.; Nie, H.; Chen, J.; Lee, H.P. Damping Force Analysis and Optimization of a Lunar Lander with MRF. J. Aerosp. Eng. 2020, 33, 04020004. [Google Scholar] [CrossRef]
- Huang, J.; Li, S.; Zhou, Y.; Xu, T.; Li, Y.; Wang, H.; Wang, S. A heavy-duty magnetorheological fluid mount with flow and squeeze model. Smart Mater. Struct. 2021, 30, 085012. [Google Scholar] [CrossRef]
- Liu, S.; Shi, X.; Zhao, D.; Chen, L.; Feng, L.; Zhang, Z. Research on the vibration transmissibility of impedance modulating structure based on magnetorheological fluid. Smart Mater. Struct. 2018, 27, 115016. [Google Scholar] [CrossRef]
- Irazu, L.; Elejabarrieta, M.J. Magneto-dynamic analysis of sandwiches composed of a thin viscoelastic-magnetorheological layer. J. Intell. Mater. Syst. Struct. 2017, 28, 3106–3114. [Google Scholar] [CrossRef]
- Wei, M.; Sun, L.; Hu, G. Dynamic properties of an axially moving sandwich beam with magnetorheological fluid core. Adv. Mech. Eng. 2017, 9, 1687814017693182. [Google Scholar] [CrossRef]
- Soroor, A.O.; Asgari, M.; Haddadpour, H. Effect of axially graded constraining layer on the free vibration properties of three layered sandwich beams with magnetorheological fluid core. Compos. Struct. 2020, 255, 112899. [Google Scholar] [CrossRef]
- Eshaghi, M.; Sedaghati, R.; Rakheja, S. Vibration analysis and optimal design of multi-layer plates partially treated with the MR fluid. Mech. Syst. Signal Process. 2017, 82, 80–102. [Google Scholar] [CrossRef]
- Arani, A.G.; Zarei, H.B.; Haghparast, E. Vibration response of viscoelastic sandwich plate with magnetorheological fluid core and functionally graded-piezoelectric nanocomposite face sheets. J. Vib. Control 2018, 24, 5169–5185. [Google Scholar] [CrossRef]
- Polunin, V.M.; Ryapolov, P.A.; Storozhenko, A.M.; Shabanova, I.A. Structural-acoustic analysis of a nanodispersed magnetic fluid. Sov. Phys. J. 2011, 54, 9–15. [Google Scholar] [CrossRef]
- Polunin, V.M.; Storozhenko, A.M. Interaction of physical fields in the acoustomagnetic effect. Acoust. Phys. 2012, 58, 180–186. [Google Scholar] [CrossRef]
- Rodríguez-López, J.; Segura, L.E.; Freijo, F.M.D.E. Ultrasonic velocity and amplitude characterization of magnetorheological fluids under magnetic fields. J. Magn. Magn. Mater. 2012, 324, 222–230. [Google Scholar] [CrossRef]
- Rodriguez-Lopez, J.; Elvira, L.; Resa, P.; De Espinosa, F.M. Sound attenuation in magnetorheological fluids. J. Phys. D Appl. Phys. 2013, 46, 065001. [Google Scholar] [CrossRef]
- Shen, M.; Huang, Q. Acoustic velocity and attenuation coefficient of magnetorheological fluids under electromagnetic fields. Appl. Acoust. 2016, 107, 27–33. [Google Scholar] [CrossRef] [Green Version]
- Baev, A.R.; Korobko, E.V.; Novikova, Z.A. Acoustical properties of magnetorheological fluids under applied magnetic field. J. Intell. Mater. Syst. Struct. 2015, 26, 1913–1919. [Google Scholar] [CrossRef]
- Zielinski, T.G.; Rak, M. Acoustic Absorption of Foams Coated with MR Fluid under the Influence of Magnetic Field. J. Intell. Mater. Syst. Struct. 2009, 21, 125–131. [Google Scholar] [CrossRef]
- Muhazeli, N.S.; Nordin, N.A.; Ubaidillah, U.; Mazlan, S.A.; Aziz, S.A.A.; Nazmi, N.; Yahya, I. Magnetic and Tunable Sound Absorption Properties of an In-Situ Prepared Magnetorheological Foam. Materials 2020, 13, 5637. [Google Scholar] [CrossRef] [PubMed]
- Yan, W.; Gao, Y. Tunable acoustic waveguide based on a magnetorheological fluid filling. Appl. Phys. Express 2021, 14, 116501. [Google Scholar] [CrossRef]
- Hemmatian, M.; Sedaghati, R. Effect of applied magnetic field on sound transmission loss of MR-based sandwich panels. Smart Mater. Struct. 2016, 26, 025006. [Google Scholar] [CrossRef]
- Hemmatian, M.; Sedaghati, R. Sound transmission analysis of MR fluid based-circular sandwich panels: Experimental and finite element analysis. J. Sound Vib. 2017, 408, 43–59. [Google Scholar] [CrossRef]
- Mahjoob, M.J.; Mohammadi, N.; Malakooti, S. Analytical and experimental evaluation of magnetic field effect on sound transmission loss of MR-based smart multi-layered panels. Appl. Acoust. 2012, 73, 614–623. [Google Scholar] [CrossRef]
- Allan, P.; Ahmadnia, A.; Withnall, R.; Silver, J. Sound transmission testing of polymer compounds. Polym. Test. 2011, 31, 312–321. [Google Scholar] [CrossRef]
- Haris, A.; Kureemun, U.; Tran, L.Q.N.; Lee, H.P. Noise reduction capability of hybrid flax fabric-reinforced polypropylene-based composites. Adv. Compos. Mater. 2018, 28, 335–346. [Google Scholar] [CrossRef]
- Guan, Y.; Zhao, D.; Low, T.S. Experimental evaluation on acoustic impedance and sound absorption performances of porous foams with additives with Helmholtz number. Aerosp. Sci. Technol. 2021, 119, 107120. [Google Scholar] [CrossRef]
- Cheng, Z.; Lu, Z. Research on Dynamic Load Characteristics of Advanced Variable Speed Drive System for Agricultural Machinery during Engagement. Agriculture 2022, 12, 161. [Google Scholar] [CrossRef]
- Cheng, Z.; Zhou, H.; Lu, Z. A Novel 10-Parameter Motor Efficiency Model Based on I-SA and Its Comparative Application of Energy Utilization Efficiency in Different Driving Modes for Electric Tractor. Agriculture 2022, 12, 362. [Google Scholar] [CrossRef]
- Wang, N.; Liu, X.; Sun, S.; Krolczyk, G.; Li, Z.; Li, W. Microscopic characteristics of magnetorheological fluids subjected to magnetic fields. J. Magn. Magn. Mater. 2020, 501, 166443. [Google Scholar] [CrossRef]
- Cheng, Z.; Chen, Y.; Li, W.; Liu, J.; Li, L.; Zhou, P.; Chang, W.; Lu, Z. Full Factorial Simulation Test Analysis and I-GA Based Piecewise Model Comparison for Efficiency Characteristics of Hydro Mechanical CVT. Machines 2022, 10, 358. [Google Scholar] [CrossRef]
- Zhao, D.; Ji, C.; Li, J.; Ang, L. Experimental comparison of noise dissipation effects of single- and double-layer acoustic liners. Appl. Acoust. 2018, 141, 281–292. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Based Fluid | Density | Particles Packing (vol.) | Viscosity (20 °C) (γ = 10/s) | Shear Stress (B = 0.5 T) | Operating Temperature |
|---|---|---|---|---|---|
| Hydrocarbon | 2.65 g/cm3 | 25% | 0.8 Pa.s | >50 kPa | −40 °C to 130 °C |
| Material | Density | Poisson’s Ratio | Elasticity Modulus |
|---|---|---|---|
| ABS | 1020 kg/m3 | 0.39 | 2 GPa |
| PM | 6000 kg/m3 | 0.24 | 0.15 GPa |
| Total Thickness (mm) | Type Code | |
|---|---|---|
| 10 | Type A−10 | Type B−10 |
| 15 | Type A−15 | Type B−15 |
| 20 | Type A−20 | Type B−20 |
| 25 | Type A−25 | Type B−25 |
| Number | Intensity (T) | Number | Intensity (T) |
|---|---|---|---|
| Type A−10 | 0.142 | Type B−10 | 0.177 |
| Type A−15 | 0.173 | Type B−15 | 0.227 |
| Type A−20 | 0.193 | Type B−20 | 0.264 |
| Type A−25 | 0.223 | Type B−25 | 0.277 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Wang, Y.; Wang, Y. Influence of Magnetic Field on Sound Transmission Loss of the Unit Filled with Magnetorheological Fluid. Materials 2022, 15, 6032. https://doi.org/10.3390/ma15176032
Xu X, Wang Y, Wang Y. Influence of Magnetic Field on Sound Transmission Loss of the Unit Filled with Magnetorheological Fluid. Materials. 2022; 15(17):6032. https://doi.org/10.3390/ma15176032
Chicago/Turabian StyleXu, Xiaomei, Yaqin Wang, and Yiwei Wang. 2022. "Influence of Magnetic Field on Sound Transmission Loss of the Unit Filled with Magnetorheological Fluid" Materials 15, no. 17: 6032. https://doi.org/10.3390/ma15176032
APA StyleXu, X., Wang, Y., & Wang, Y. (2022). Influence of Magnetic Field on Sound Transmission Loss of the Unit Filled with Magnetorheological Fluid. Materials, 15(17), 6032. https://doi.org/10.3390/ma15176032