


Vibration Suppression Algorithm for Electromechanical Equipment in Distributed Energy Supply Systems


Abstract
1. Introduction
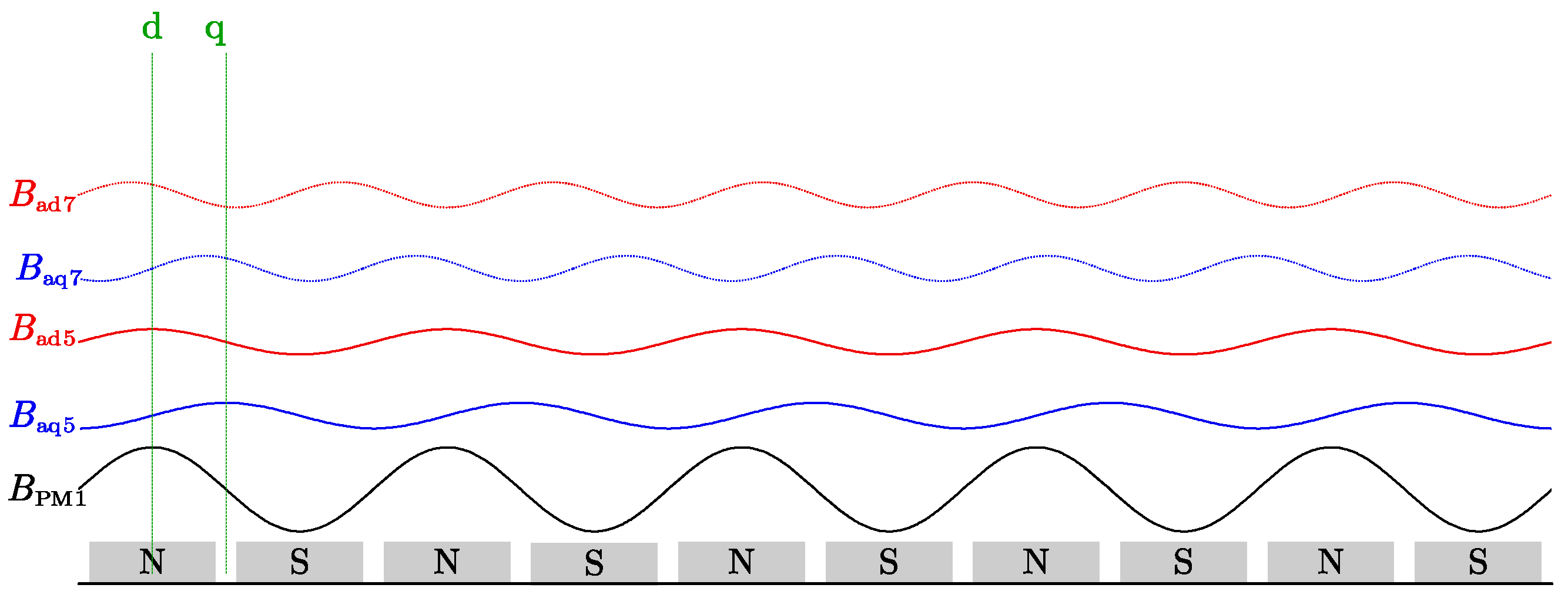
2. The Main Sources of Fractional-Slot PMSM Vibration
3. Vibration Suppression Algorithm for Fractional-Slot PMSMs Based on a d-Axis Current Injection
- (1)
- Only consider pr(−2pn, 2);
- (2)
- The motor is an ideal surface-mounted motor, satisfying Ld = Lq, and adopts id = 0 control.
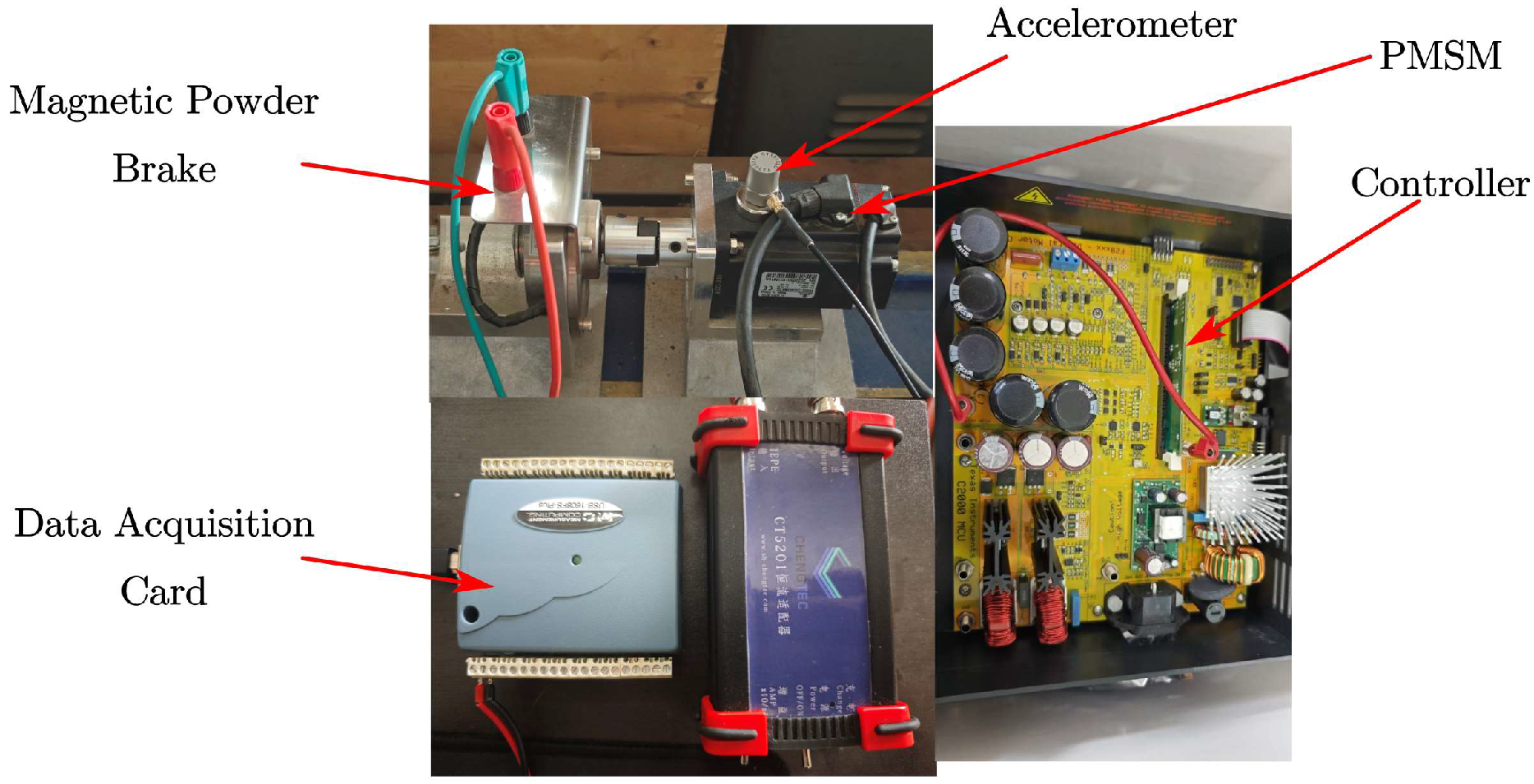
4. Experiment Verification
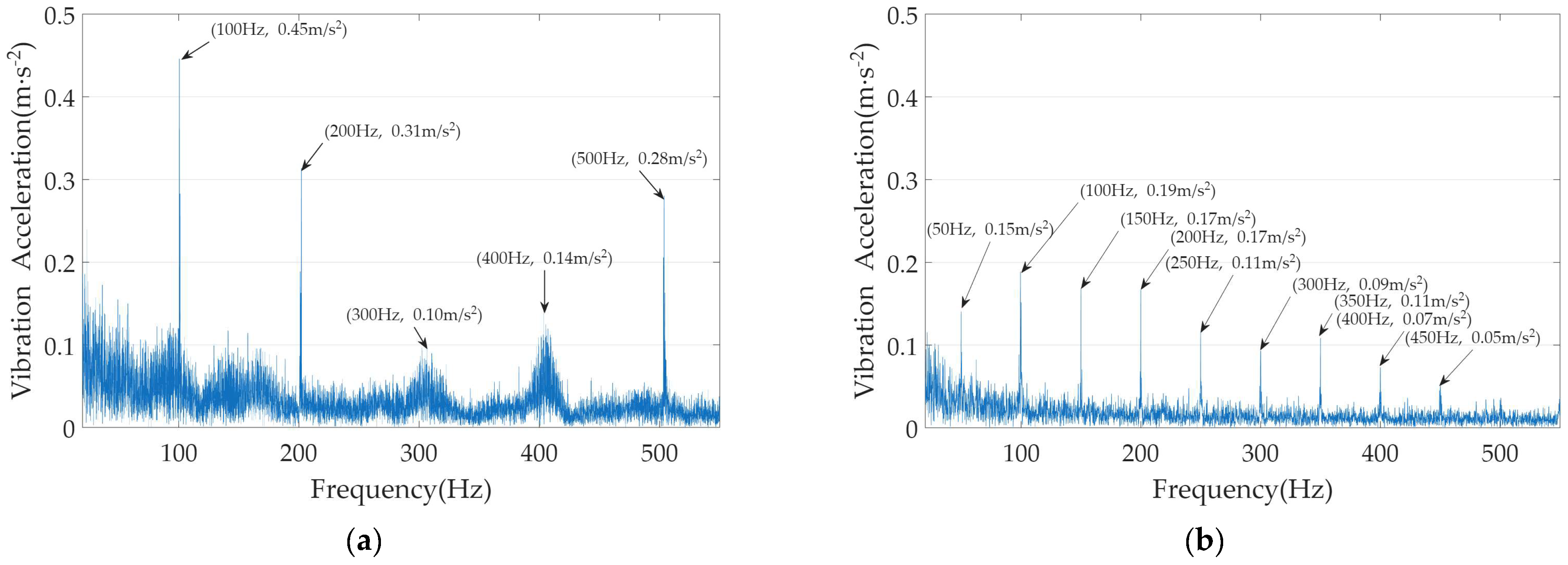
4.1. Experimental Results at 600 r/min
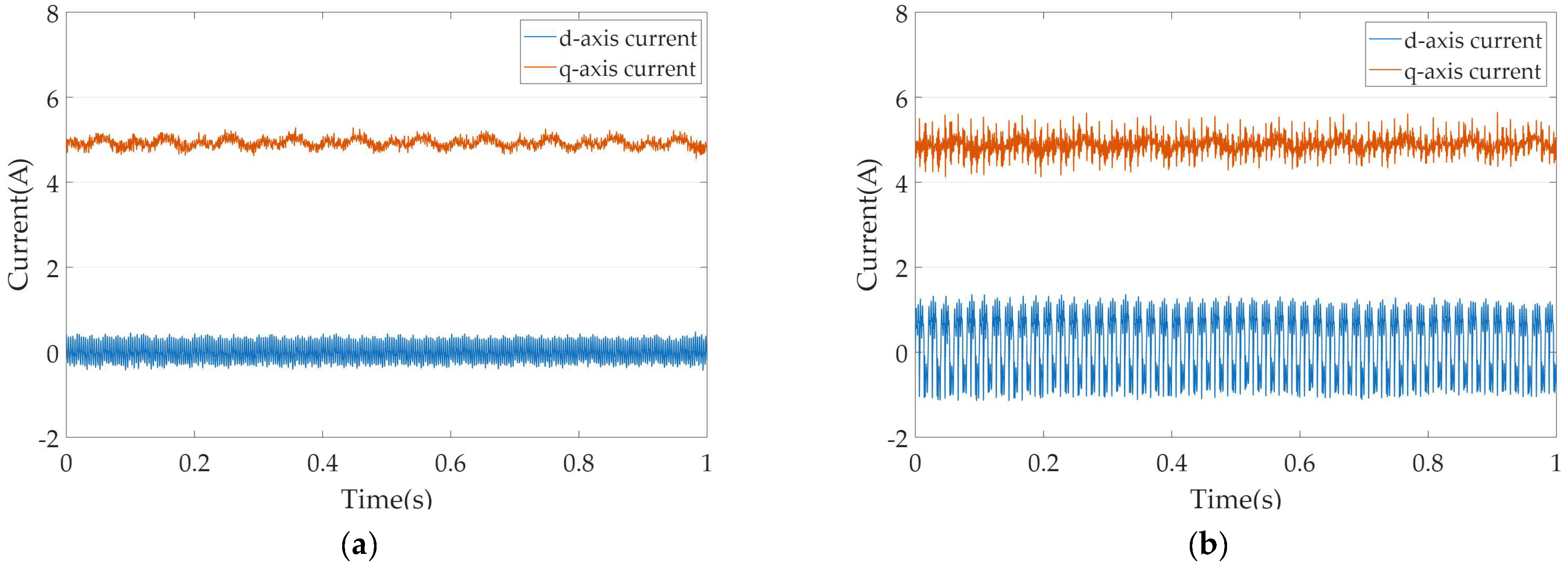
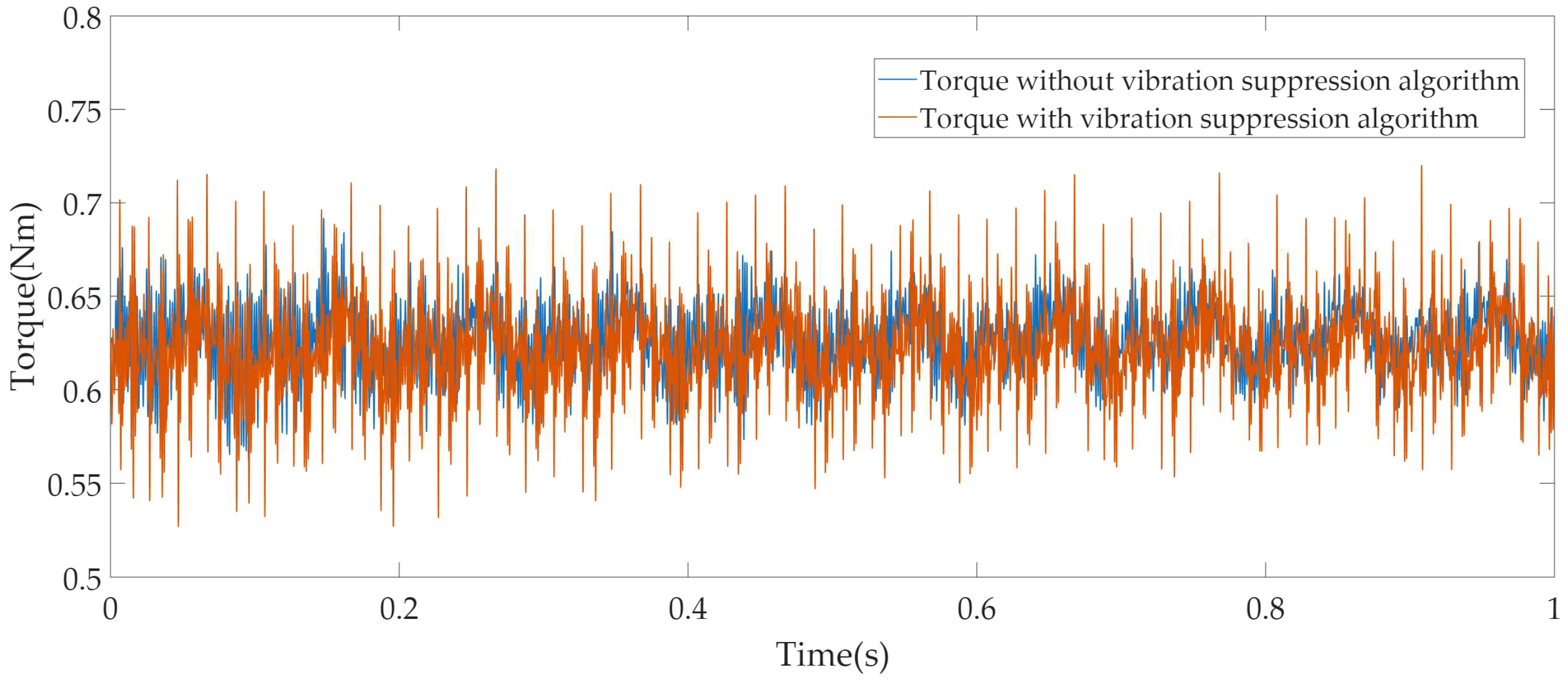
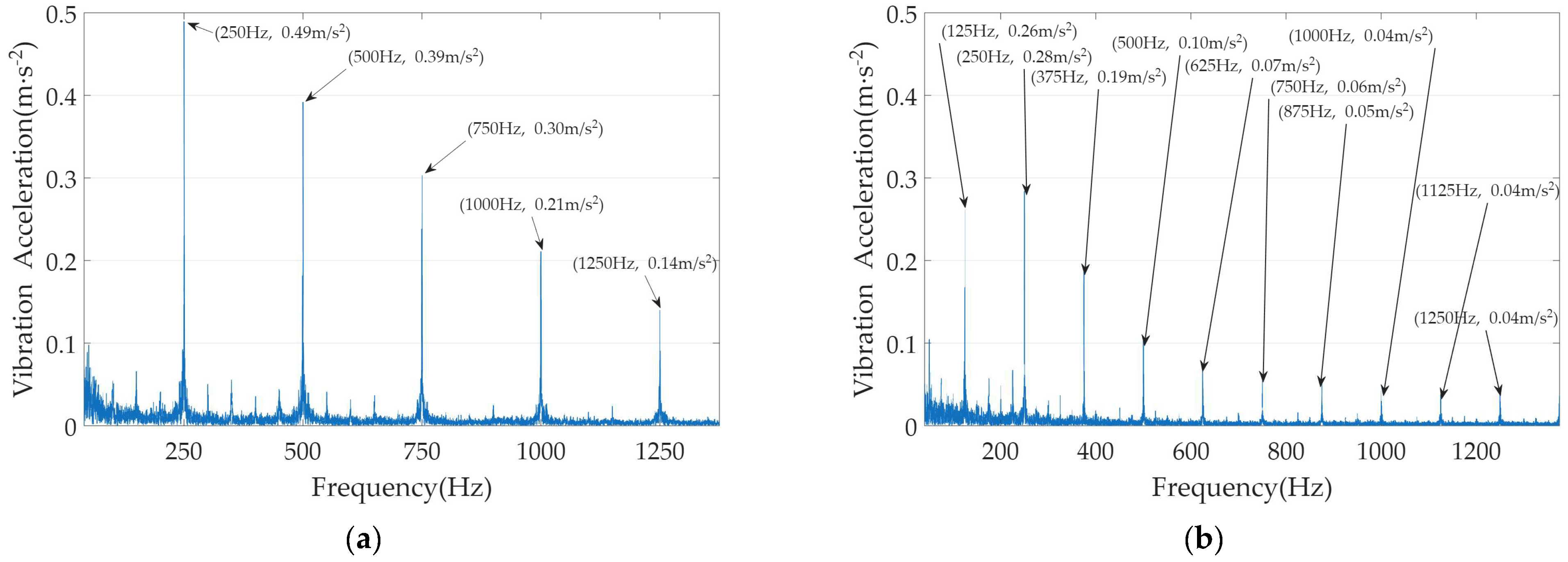
4.2. Experimental Results at 1500 r/min
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Zhang, O.; Li, P.; Yue, X.; Tan, Z. Two-Stage Robust Optimization Model for Flexible Response of Micro-Energy Grid Clusters to Host Utility Grid. Energies 2025, 18, 3030. [Google Scholar] [CrossRef]
- He, L.; Zhu, Y.; Liu, G.; Cao, C. Simulation Analysis and Experiment Research of Transformer Vibration Based on Electric–Magnetic–Mechanic Coupling. Energies 2025, 18, 2238. [Google Scholar] [CrossRef]
- Stosiak, M.; Yatskiv, I.; Prentkovskis, O.; Karpenko, M. Reduction of Pressure Pulsations over a Wide Frequency Range in Hydrostatic Systems. Machines 2025, 13, 25. [Google Scholar] [CrossRef]
- Wang, S.; Hong, J.; Sun, Y.; Zheng, Z.; Cao, H. Filling Force Valley with Interpoles for Pole-Frequency Vibration Reduction in Surface-Mounted PM Synchronous Machines. IEEE Trans. Ind. Electron. 2019, 67, 6709–6720. [Google Scholar]
- Zhu, Z.; Xia, Z.; Wu, L.; Jewell, G.W. Analytical Modeling and Finite-Element Computation of Radial Vibration Force in Fractional-Slot Permanent-Magnet Brushless Machines. IEEE Trans. Ind. Appl. 2010, 46, 1908–1918. [Google Scholar] [CrossRef]
- Wang, S.; Yang, Z.; Liu, C. Vibration Reduction Characteristics of Permanent Magnet DC Motors With Sawtooth Edge Poles. IEEE Trans. Energy Convers. 2021, 36, 737–745. [Google Scholar] [CrossRef]
- Wang, S.; Hong, J.; Sun, Y.; Cao, H. Effect Comparison of Zigzag Skew PM Pole and Straight Skew Slot for Vibration Mitigation of PM Brush DC Motors. IEEE Trans. Ind. Electron. 2019, 67, 4752–4761. [Google Scholar]
- Yang, Z.; Wang, S.; Hong, J.; Liu, C. Vibration Reduction by Segmented Continuous Variable Width Pole for Rotating Armature Permanent Magnet Motors. IEEE Trans. Ind. Appl. 2021, 57, 2381–4802. [Google Scholar] [CrossRef]
- Hong, J.; Wang, S.; Sun, Y.; Sun, X.; Cao, H. Piecewise Stagger Poles with Continuous Skew Edge for Vibration Reduction in Surface-Mounted PM Synchronous Machines. IEEE Trans. Ind. Electron. 2020, 68, 8498–8506. [Google Scholar]
- Yang, Z.; Wang, S.; Sun, Y.; Cao, H. Vibration Reduction by Magnetic Slot Wedge for Rotating Armature Permanent Magnet Motors. IEEE Trans. Ind. Appl. 2020, 56, 4882–4888. [Google Scholar] [CrossRef]
- Wang, S.; Hong, J.; Sun, Y.; Cao, H. Analysis and Reduction of Electromagnetic Vibration of PM Brush DC Motors. IEEE Trans. Ind. Appl. 2019, 55, 4605–4612. [Google Scholar] [CrossRef]
- Hong, J.; Wang, S.; Sun, Y.; Cao, H. An Effective Method with Copper Ring for Vibration Reduction in Permanent Magnet Brush DC Motors. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Dajaku, G.; Xie, W.; Gerling, D. Reduction of Low Space Harmonics for the Fractional Slot Concentrated Windings Using a Novel Stator Design. IEEE Trans. Magn. 2014, 50, 1–12. [Google Scholar] [CrossRef]
- Wang, D.; Peng, C.; Li, J.; Wang, C. Comparison and Experimental Verification of Different Approaches to Suppress Torque Ripple and Vibrations of Interior Permanent Magnet Synchronous Motor for EV. IEEE Trans. Ind. Electron. 2022, 70, 2209–2220. [Google Scholar] [CrossRef]
- Chen, P.; Wang, D.; Wang, B.; Li, J.; Xu, C.; Wang, X. Torque Ripple and Electromagnetic Vibration Suppression in Permanent Magnet Synchronous Motor Using Segmented Rotor with Different Pole Widths. IEEE Trans. Magn. 2022, 58, 1–5. [Google Scholar]
- Chen, L.; Chen, M.; Li, B.; Sun, X.; Jiang, F. Harmonic Current Suppression of Dual Three-Phase Permanent Magnet Synchronous Motor with Improved Proportional-Integral Resonant Controller. Energies 2025, 18, 1340. [Google Scholar] [CrossRef]
- Xu, J.; Wei, Z.; Wang, S. Active Disturbance Rejection Repetitive Control for Current Harmonic Suppression of PMSM. IEEE Trans. Power Electron. 2023, 38, 14423–14437. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Lopez, Ó.; Doval-Gandoy, J. High-performance digital resonant controllers implemented with two integrators. IEEE Trans. Power Electron. 2011, 26, 563–576. [Google Scholar] [CrossRef]
- Yepes, A.G.; Freijedo, F.D.; Lopez, Ó.; Doval-Gandoy, J. Analysis and design of resonant current controllers for voltage-source converters by means of Nyquist diagrams and sensitivity function. IEEE Trans. Ind. Electron. 2011, 58, 5231–5250. [Google Scholar] [CrossRef]
- Zhou, S.; Zhang, Y.; Liu, Z.; Liu, J.; Zhou, L. Implementation of Cross-Coupling Terms in Proportional-Resonant Current Control Schemes for Improving Current Tracking Performance. IEEE Trans. Power Electron. 2021, 36, 13248–13260. [Google Scholar] [CrossRef]
- Wu, Z.; Yang, Z.; Ding, K.; He, G. Transfer mechanism analysis of injected voltage harmonic and its effect on current harmonic raegulation in FOC PMSM. IEEE Trans. Power Electron. 2022, 37, 820–829. [Google Scholar] [CrossRef]
- Harries, M.; Woerndle, A.; De Doncker, R.W. Low Vibrations and Improved NVH in Permanent Magnet Synchronous Machines Due to Injection of Flux-Linkage Harmonics. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1649–1657. [Google Scholar] [CrossRef]
- Kang, L.; Xia, J.; Su, H.; Li, Z.; Liu, S. Online Control Strategy for Radial Vibration Suppression of PMSM by Multiharmonic Current Injection Method. IEEE Trans. Ind. Electron. 2022, 69, 8692–8704. [Google Scholar] [CrossRef]
- Wang, S.; Hong, J.; Sun, Y.; Cao, H. Analysis of Zeroth-Mode Slot Frequency Vibration of Integer Slot Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2019, 67, 2954–2964. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
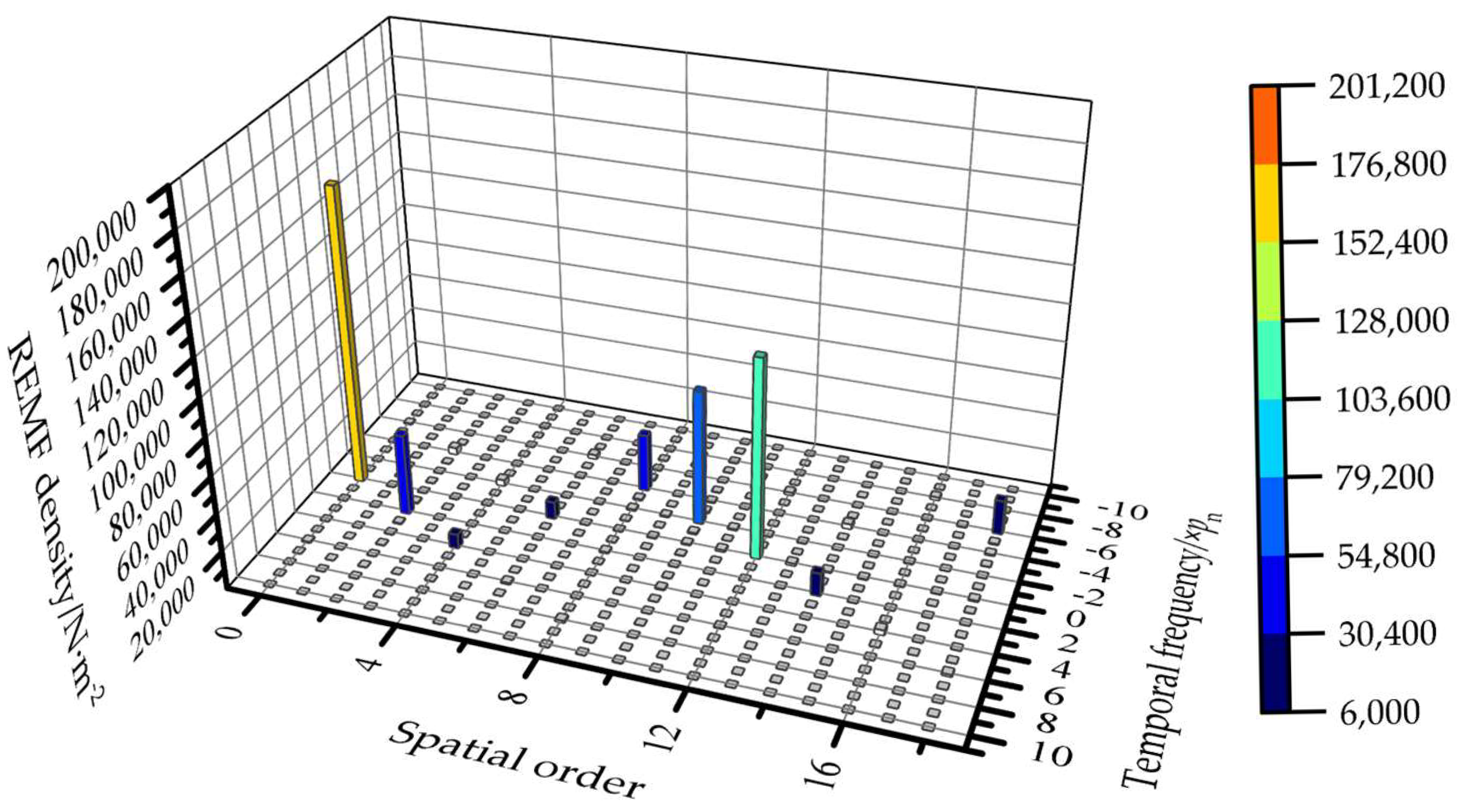
| Harmonic Orders of Air-Gap Permeance | Harmonic Orders of Permanent Magnet Field | Harmonic Orders of REMF | |||
|---|---|---|---|---|---|
| h1 | h2 | u1 | u2 | Temporal Frequency | Spatial Order |
| 0 | 0 | 1 | 1 | 0 | 0 |
| 2pn | 10 | ||||
| 3 | 4pn | 20 | |||
| 5 | 6pn | 30 | |||
| 0 | 1 | 1 | 1 | 0 | 12 |
| 2pn | 22 | ||||
| 3 | 4pn | 8 | |||
| 5 | 6pn | 18 | |||
| 1 | 1 | 1 | 1 | 0 | 24 |
| Harmonic Orders of Air-Gap Permeance | Harmonic Orders of Permanent Magnet Field | Harmonic Orders of Armature Field | Harmonic Orders of REMF | ||
|---|---|---|---|---|---|
| h1 | h2 | u | v | Temporal Frequency | Spatial Order |
| 1 | 0 | 1 | 5 | 0 | 12 |
| 0 | 0 | 1 | 5 | 0 | 0 |
| 2pn | 10 | ||||
| 1 | −7 | 0 | 12 | ||
| −2pn | 2 | ||||
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Pairs of poles pn | 5 | Dead time td (μs) | 1 |
| D-axis inductances Ld (mH) | 0.42 | Rated current ismax (A) | 5.5 |
| Q-axis inductances Lq (mH) | 0.42 | Rated speed nm (r·min−1) | 1500 |
| Resistance Rs (Ω) | 0.14 | Rated torque Tem (N·m) | 0.65 |
| Inertia J (kg·m2) | 0.58 × 10−4 | Current sampling frequency fcs (kHz) | 10 |
| PM flux linkage ψf (Wb) | 0.017 | Speed sampling frequency fss (kHz) | 1 |
| Frequency/Hz | Vibration Acceleration/m·s−2 | Current Harmonic/A | ||
|---|---|---|---|---|
| Without Vibration Suppression | With Vibration Suppression | Without Vibration Suppression | With Vibration Suppression | |
| 50 | - | 0.15 | 4.87 | 4.85 |
| 100 | 0.45 | 0.19 | - | 0.23 |
| 150 | - | 0.17 | - | 0.15 |
| 200 | 0.31 | 0.17 | - | 0.16 |
| 250 | - | 0.11 | 0.11 | 0.09 |
| 300 | 0.10 | 0.09 | - | 0.20 |
| 350 | - | 0.11 | 0.06 | 0.11 |
| 400 | 0.14 | 0.07 | - | 0.05 |
| 450 | - | 0.05 | - | 0.05 |
| 500 | 0.28 | 0.03 | - | 0.03 |
| 550 | - | 0.08 | 0.02 | 0.02 |
| Frequency/Hz | Vibration Acceleration/m·s−2 | Current Harmonic/A | ||
|---|---|---|---|---|
| Without Vibration Suppression | With Vibration Suppression | Without Vibration Suppression | With Vibration Suppression | |
| 125 | - | 0.26 | 5.49 | 5.43 |
| 250 | 0.49 | 0.28 | - | 0.03 |
| 375 | - | 0.19 | - | 0.02 |
| 500 | 0.39 | 0.10 | - | 0.11 |
| 625 | - | 0.07 | 0.19 | 0.17 |
| 750 | 0.30 | 0.06 | - | 0.18 |
| 875 | - | 0.05 | 0.11 | 0.16 |
| 1000 | 0.21 | 0.04 | - | 0.04 |
| 1125 | - | 0.04 | - | 0.03 |
| 1250 | 0.14 | 0.04 | - | 0.02 |
| 1375 | - | 0.03 | 0.01 | 0.01 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Han, F.; Zhang, B.; Zhao, G. Vibration Suppression Algorithm for Electromechanical Equipment in Distributed Energy Supply Systems. Energies 2025, 18, 3757. https://doi.org/10.3390/en18143757
Wang H, Han F, Zhang B, Zhao G. Vibration Suppression Algorithm for Electromechanical Equipment in Distributed Energy Supply Systems. Energies. 2025; 18(14):3757. https://doi.org/10.3390/en18143757
Chicago/Turabian StyleWang, Huan, Fangxu Han, Bo Zhang, and Guilin Zhao. 2025. "Vibration Suppression Algorithm for Electromechanical Equipment in Distributed Energy Supply Systems" Energies 18, no. 14: 3757. https://doi.org/10.3390/en18143757
APA StyleWang, H., Han, F., Zhang, B., & Zhao, G. (2025). Vibration Suppression Algorithm for Electromechanical Equipment in Distributed Energy Supply Systems. Energies, 18(14), 3757. https://doi.org/10.3390/en18143757