
Real-Time Estimation Methods for the Frequency Support Function Based on a Virtual Wind Turbine


Abstract
1. Introduction
2. Type 4B Wind Turbine System Modeling
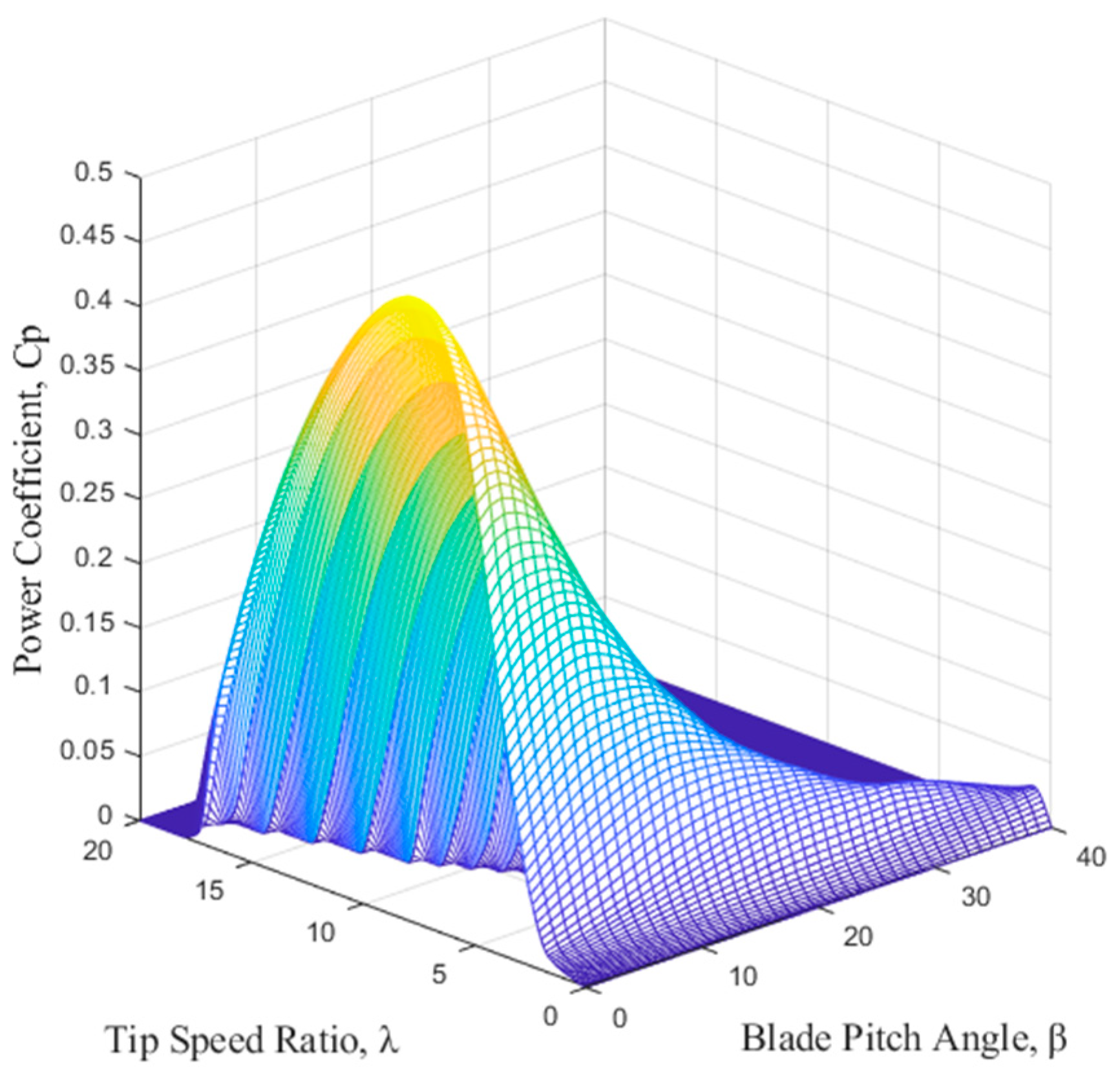
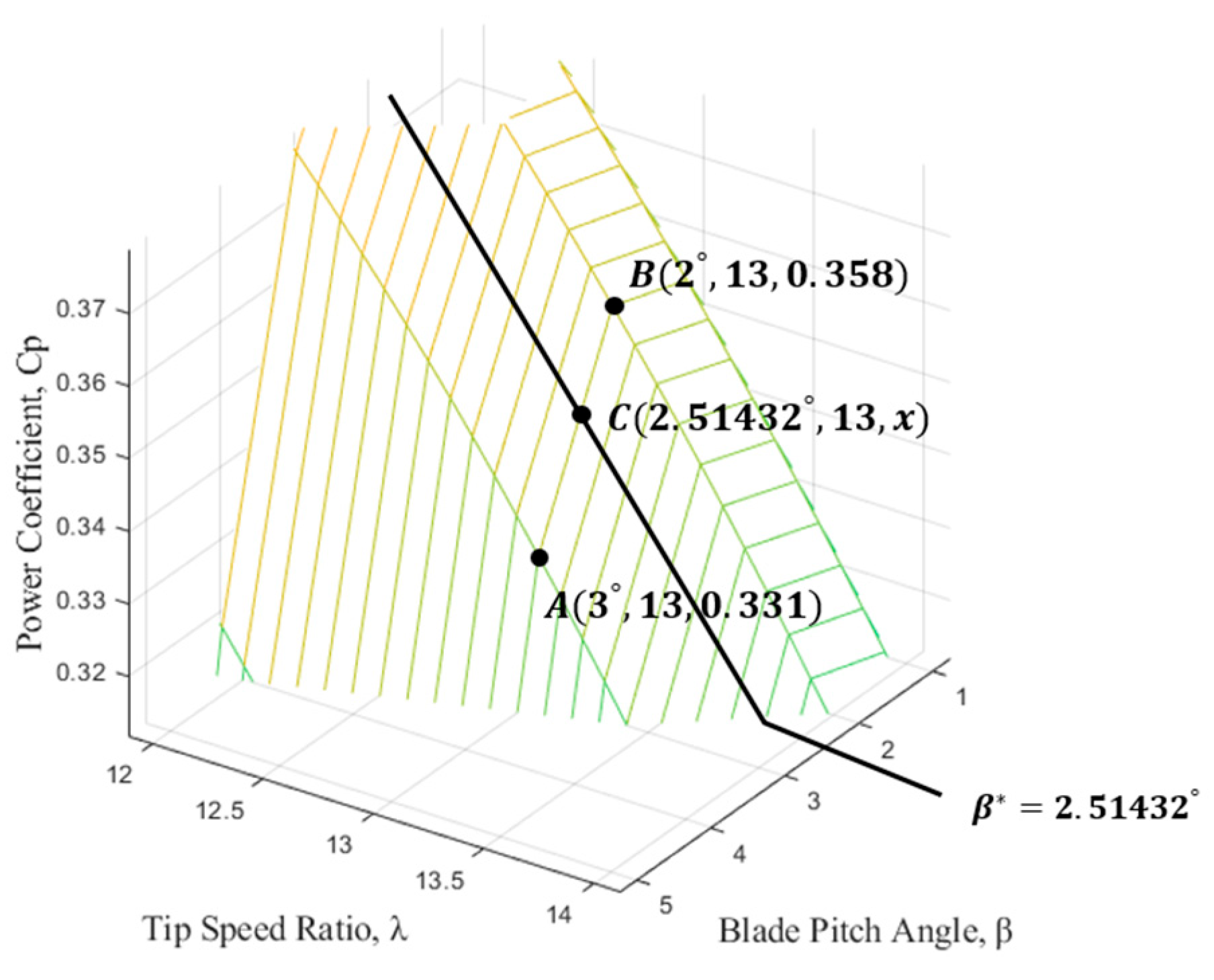
2.1. Blade Model
2.2. Back-to-Back Converter Model
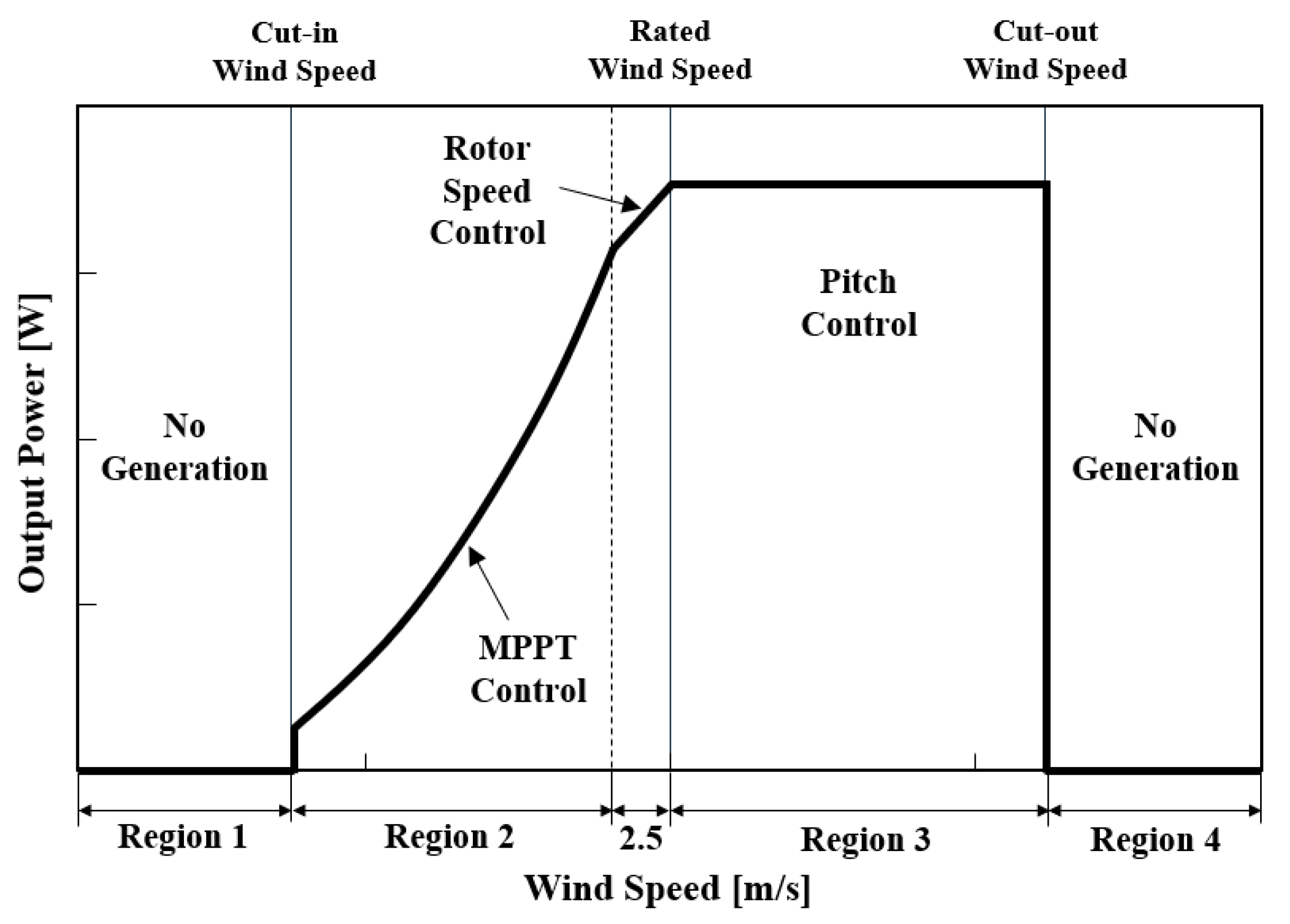
2.3. Torque Controller
2.4. Pitch Controller
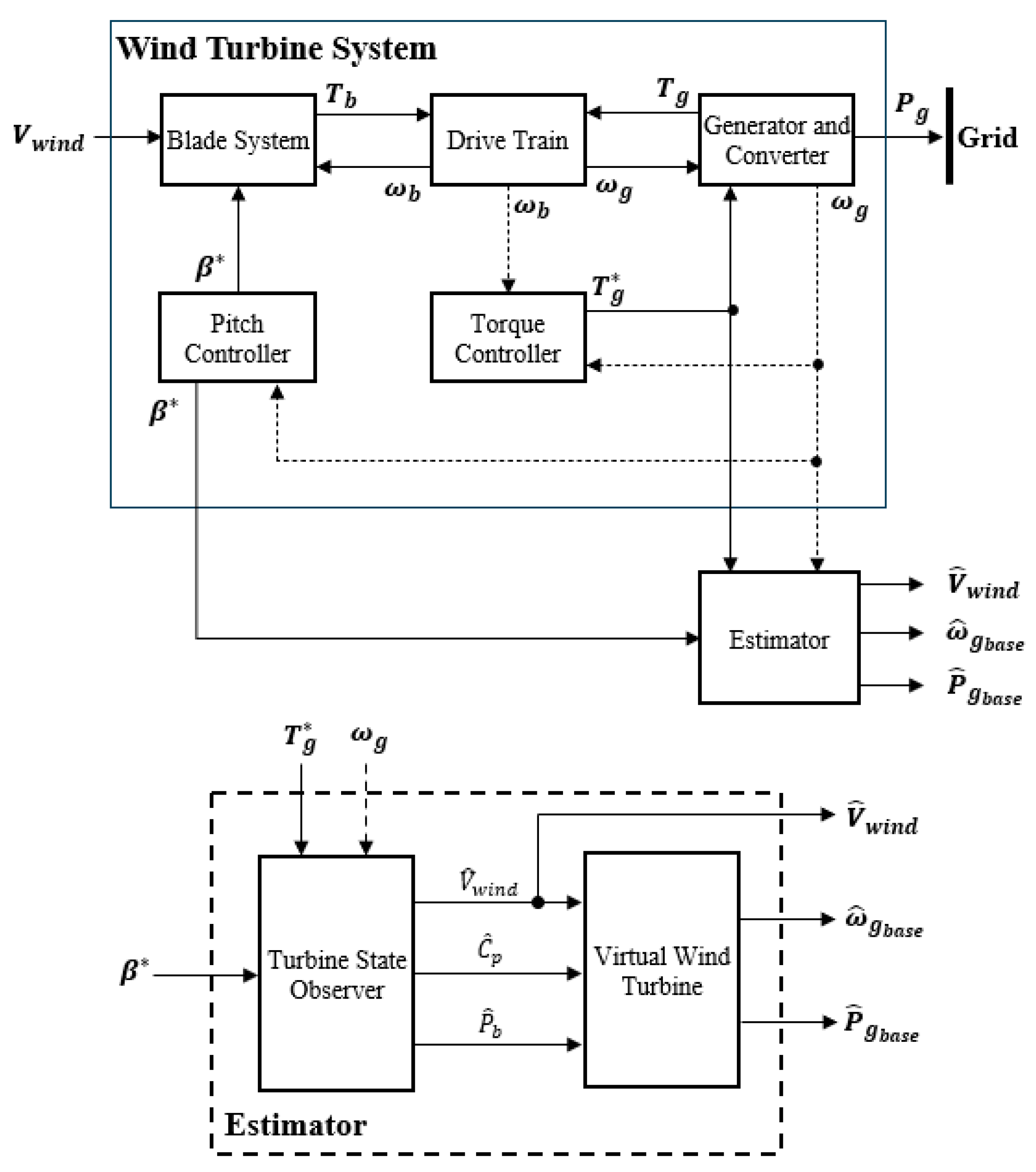
3. Proposed Estimator Based on a Virtual Wind Turbine Model
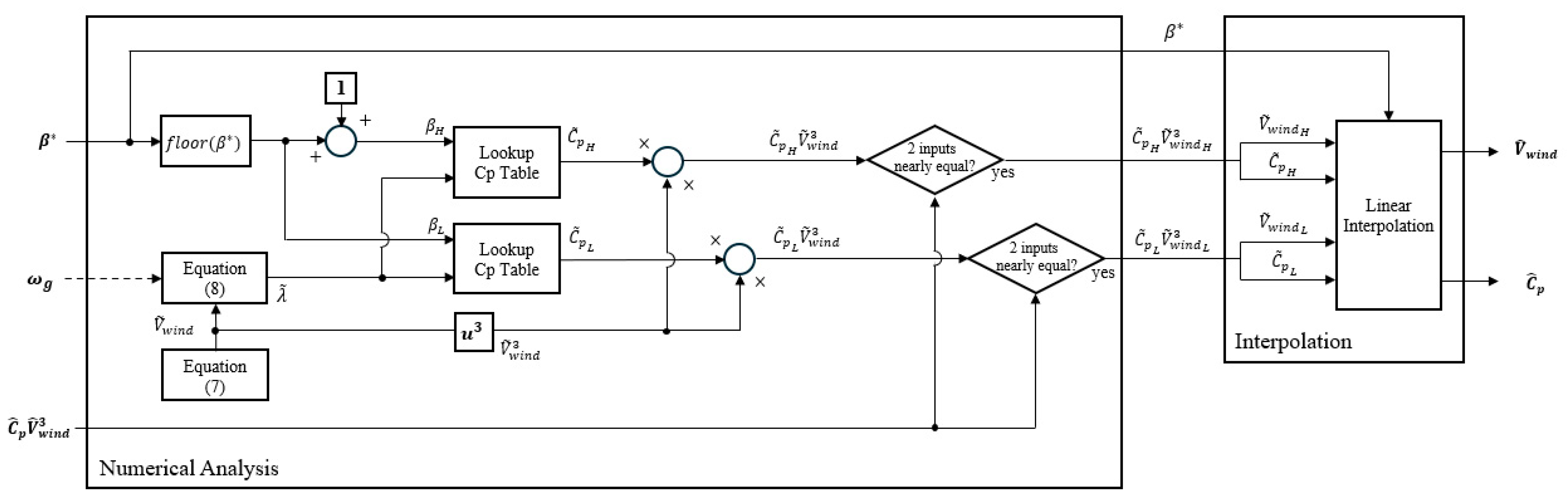
3.1. Turbine State Observer
3.2. Virtual Wind Turbine
4. Simulation Results and Discussions
4.1. Case Study
4.2. Case 1: Average Wind Speed 6.5 m/s, Average Frequency 60 Hz, Droop Coefficient 1%
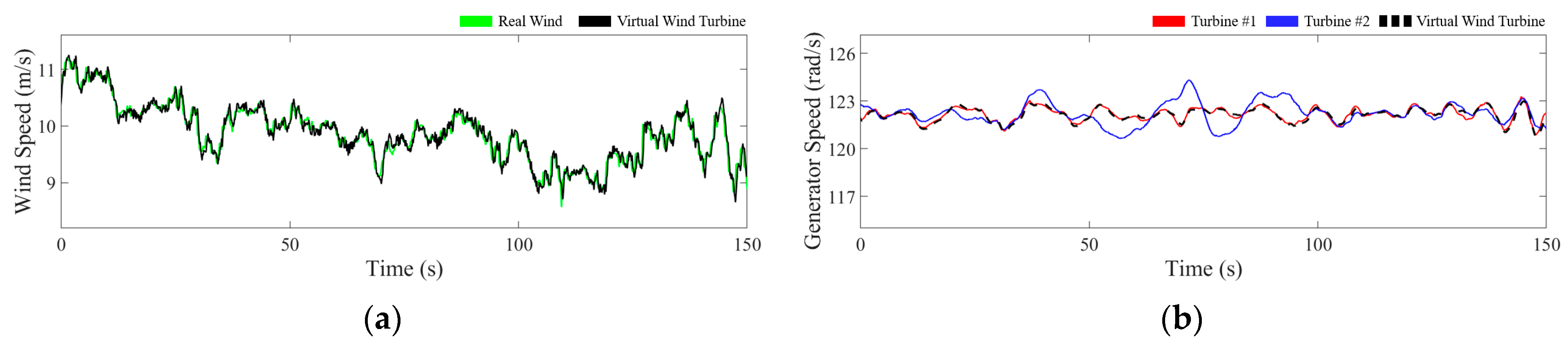
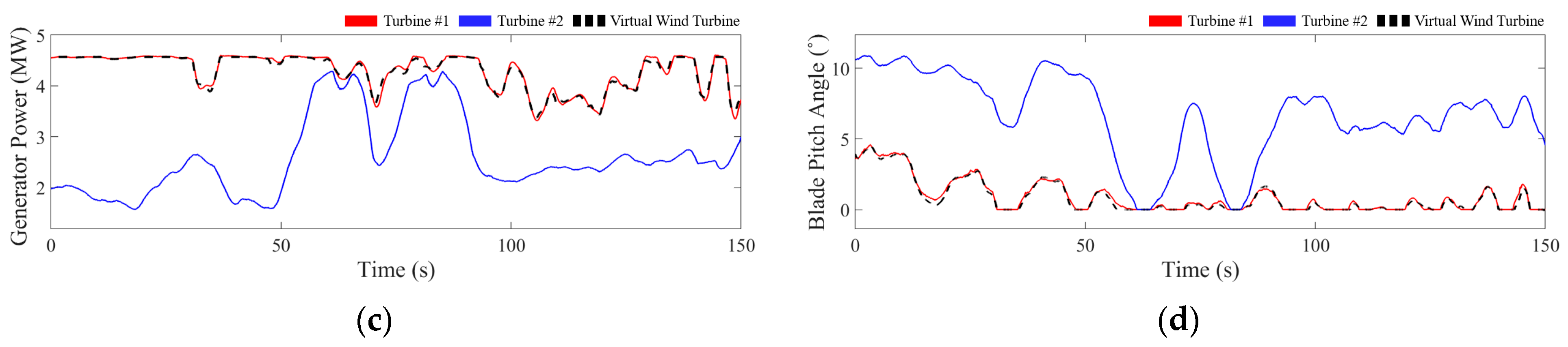
4.3. Case 2: Average Wind Speed 10 m/s, Average Frequency 60.1 Hz, Droop Coefficient 0.5%
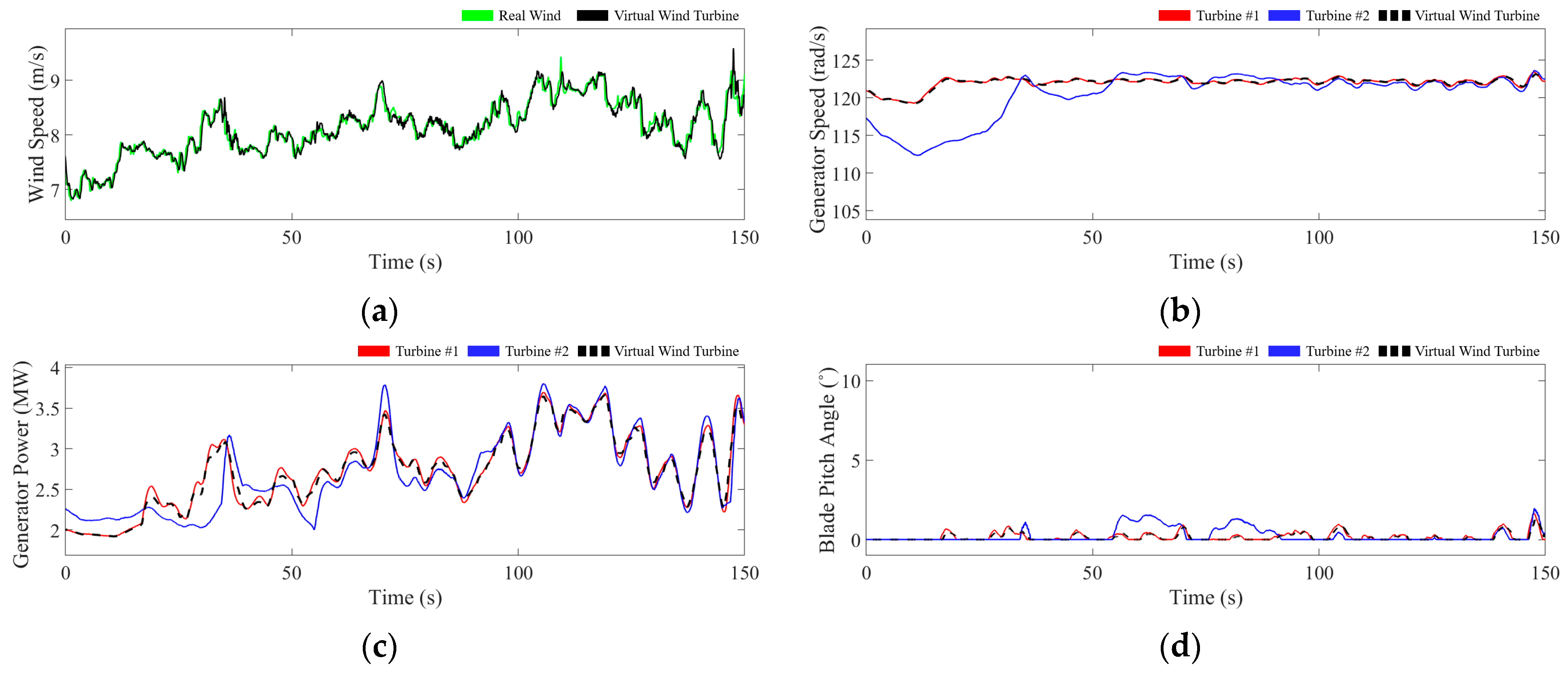
4.4. Case 3: Average Wind Speed 8 m/s, Average Frequency 60 Hz, Droop Coefficient 1%
4.5. Robustness Evaluation of Proposed Model Using WMAPE
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- EN 50160:2007; Voltage Characteristics of Electricity Supplied by Public Distribution Networks. European Committee for Electrotechnical Standardization (CENELEC): Brussels, Belgium, 2007.
- Wu, L.; Infield, D.G. Towards an assessment of power system frequency support from wind plant—Modeling aggregate inertial response. IEEE Trans. Power Syst. 2013, 28, 2283–2291. [Google Scholar] [CrossRef]
- Mohamed, Y.A.-R.I.; El-Saadany, E.F. Adaptive Decentralized Droop Controller to Preserve Power Sharing Stability of Paralleled Inverters in Distributed Generation Microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Dall’Asta, M.S.; Lazzarin, T.B. A Review of Fast Power-Reserve Control Techniques in Grid-Connected Wind Energy Conversion Systems. Energies 2024, 17, 451. [Google Scholar] [CrossRef]
- Zhang, J.; Li, H.; Cheng, P.; Yan, J. Interpretable Wind Power Short-Term Power Prediction Model Using Deep Graph Attention Network. Energies 2024, 17, 384. [Google Scholar] [CrossRef]
- Ullah, F.; Khan, H.; Mehmood, U.; Ali, M.; Rauf, M.; Kim, C.H. A Comprehensive Review of Wind Power Integration and Energy Storage Technologies for Modern Grid Frequency Regulation. Heliyon 2024, 10, e30466. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, S. Probabilistic Frequency Stability Analysis Considering Dynamics of Wind Power Generation with Different Control Strategies. IEEE Trans. Power Syst. 2024, 39, 6412–6425. [Google Scholar] [CrossRef]
- Ibrahim, H.; Ghandour, M.; Dimitrova, M.; Ilinca, A.; Perron, J. Integration of wind energy into electricity systems: Technical challenges and actual solutions. Energy Procedia 2011, 6, 815–824. [Google Scholar] [CrossRef]
- Björk, J.; Pombo, D.V.; Johansson, K.H. Variable-Speed Wind Turbine Control Designed for Coordinated Fast Frequency Reserves. IEEE Trans. Power Syst. 2022, 37, 1471–1481. [Google Scholar] [CrossRef]
- Cheng, Y.; Azizipanah-Abarghooee, R.; Azizi, S.; Ding, L.; Terzija, V. Smart frequency control in low inertia energy systems based on frequency response techniques: A review. Appl. Energy 2020, 279, 115798. [Google Scholar] [CrossRef]
- Van de Vyver, J.; De Kooning, J.D.M.; Meersman, B.; Vandevelde, L.; Vandoorn, T.L. Droop control as an alternative inertial response strategy for the synthetic inertia on wind turbines. IEEE Trans. Power Syst. 2016, 31, 1129–1138. [Google Scholar] [CrossRef]
- Tan, Y.; Meegahapola, L.; Muttaqi, K.M. A suboptimal power-point tracking-based primary frequency response strategy for DFIGs in hybrid remote area power supply systems. IEEE Trans. Energy Convers. 2016, 31, 93–105. [Google Scholar] [CrossRef]
- Phung, B.N.; Wu, Y.-K.; Pham, M.-H. Novel Fuzzy Logic Controls to Enhance Dynamic Frequency Control and Pitch Angle Regulation in Variable-Speed Wind Turbines. Energies 2024, 17, 2617. [Google Scholar] [CrossRef]
- Karbouj, H.; Rather, Z.H.; Flynn, D.; Qazi, H.W. Non-synchronous fast frequency reserves in renewable energy integrated power systems: A critical review. Int. J. Electr. Power Energy Syst. 2019, 106, 488–501. [Google Scholar] [CrossRef]
- Vidyanandan, K.V.; Senroy, N. Primary frequency regulation by deloaded wind turbines using variable droop. IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Boyle, J.; Littler, T. A Review of Frequency-Control Techniques for Wind Power Stations to Enable Higher Penetration of Renewables onto the Irish Power System. Energy Rep. 2024, 12, 5567–5581. [Google Scholar] [CrossRef]
- Trinh, D.-T.; Wu, Y.-K.; Pham, M.-H. Adaptive Frequency Control Strategy for PMSG-Based Wind Turbines with Improved Rotor Speed Recovery. IEEE Access 2024, 12, 63853–63864. [Google Scholar] [CrossRef]
- Jiang, B.; Guo, C.; Chen, Z. Modeling the Coupling of Rotor Speed, Primary Frequency Reserve and Virtual Inertia of Wind Turbines in Frequency Constrained Look-Ahead Dispatch. IEEE Trans. Sustain. Energy 2024, 15, 1885–1899. [Google Scholar] [CrossRef]
- Kim, Y.-C.; Song, S.-H. Validity Study of foreign Technical Standards for Frequency-Based Synthetic Inertia Through Analysis of Wind Turbines and Power System Dynamics. Trans. Korean Inst. Power Electron. 2023, 28, 377–386. [Google Scholar] [CrossRef]
- Chowdhury, M.M.; Haque, M.E.; Aktarujjaman, M.; Negnevitsky, M.; Gargoom, A. Grid integration impacts and energy storage systems for wind energy applications—A review. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar]
- Gupta, A. Integration Challenges of Wind Power on Power System Grid: A Review. In Proceedings of the 2018 International Conference on Advanced Computation and Telecommunication (ICACAT), Bhopal, India, 28–29 December 2018; pp. 1–7. [Google Scholar]
- Duong, M.Q.; Le, K.H.; Grimaccia, F.; Leva, S.; Mussetta, M.; Zich, R.E. Comparison of power quality in different grid-integrated wind turbines. In Proceedings of the 2014 16th International Conference on Harmonics and Quality of Power (ICHQP), Bucharest, Romania, 25–28 May 2014; pp. 448–452. [Google Scholar]
- Nguyen, N.; Mitra, J. Effect of wind power on load frequency control. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Wang, Y.; Li, Y.; Lin, S.; Cao, X.; Ren, Y.; Wu, Y. Analysis of Frequency Regulation Capability and Fatigue Loads of Wind Turbine Based on Over-Speed Control. Electronics 2023, 12, 2009. [Google Scholar] [CrossRef]
- Kim, Y.-C.; Woo, B.-H.; Song, S.-H. Real-Time Estimation of MPPT Reference Point in Frequency Droop Controlled Wind Turbines. Trans. Korean Inst. Power Electron. 2025, 30, 148–158. [Google Scholar] [CrossRef]
- Merabet, A.; Rajasekaran, V.; Kerr, J. Modelling and control of a pitch controlled wind turbine experiment workstation. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 4316–4320. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009.
- Kim, J.-J.; Song, S.-H. PSCAD/EMTDC simulation model of variable speed wind power generation system using permanent magnet synchronous machine. Trans. Korean Inst. Power Electron. 2005, 10, 253–256. [Google Scholar]
- Ha, K.; Bae, J.; Choi, Y.; Kim, Y.; Lee, J.; Han, J. Recent control technologies for floating offshore wind energy system: A review. Int. J. Precis. Eng. Manuf. Green Technol. 2021, 8, 281–301. [Google Scholar] [CrossRef]
- Nam, Y.-S. Wind Turbine System Control; GS Intervision: Seoul, Republic of Korea, 2013; pp. 28–37. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit |
|---|---|---|
| Category | Case 1 (%) | Case 2 (%) | Case 3 (%) |
|---|---|---|---|
| Wind speed | 1.206 | 3.758 | 1.050 |
| Generator speed | 0.2912 | 0.0785 | 0.080 |
| Generator power | 0.8767 | 0.8406 | 1.329 |
| Blade pitch angle | 8.458 | 19.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woo, B.-H.; Kim, Y.-C.; Song, S.-H. Real-Time Estimation Methods for the Frequency Support Function Based on a Virtual Wind Turbine. Energies 2025, 18, 2774. https://doi.org/10.3390/en18112774
Woo B-H, Kim Y-C, Song S-H. Real-Time Estimation Methods for the Frequency Support Function Based on a Virtual Wind Turbine. Energies. 2025; 18(11):2774. https://doi.org/10.3390/en18112774
Chicago/Turabian StyleWoo, Bo-Hyun, Ye-Chan Kim, and Seung-Ho Song. 2025. "Real-Time Estimation Methods for the Frequency Support Function Based on a Virtual Wind Turbine" Energies 18, no. 11: 2774. https://doi.org/10.3390/en18112774
APA StyleWoo, B.-H., Kim, Y.-C., & Song, S.-H. (2025). Real-Time Estimation Methods for the Frequency Support Function Based on a Virtual Wind Turbine. Energies, 18(11), 2774. https://doi.org/10.3390/en18112774