
Frequency-Dependent Grounding Impedance of a Pair of Hemispherical Electrodes: Inductive or Capacitive Behavior?



Abstract
1. Introduction
2. Background and Review
2.1. Review of Recent Results
2.2. Validity of the Quasi-Stationary Approximation
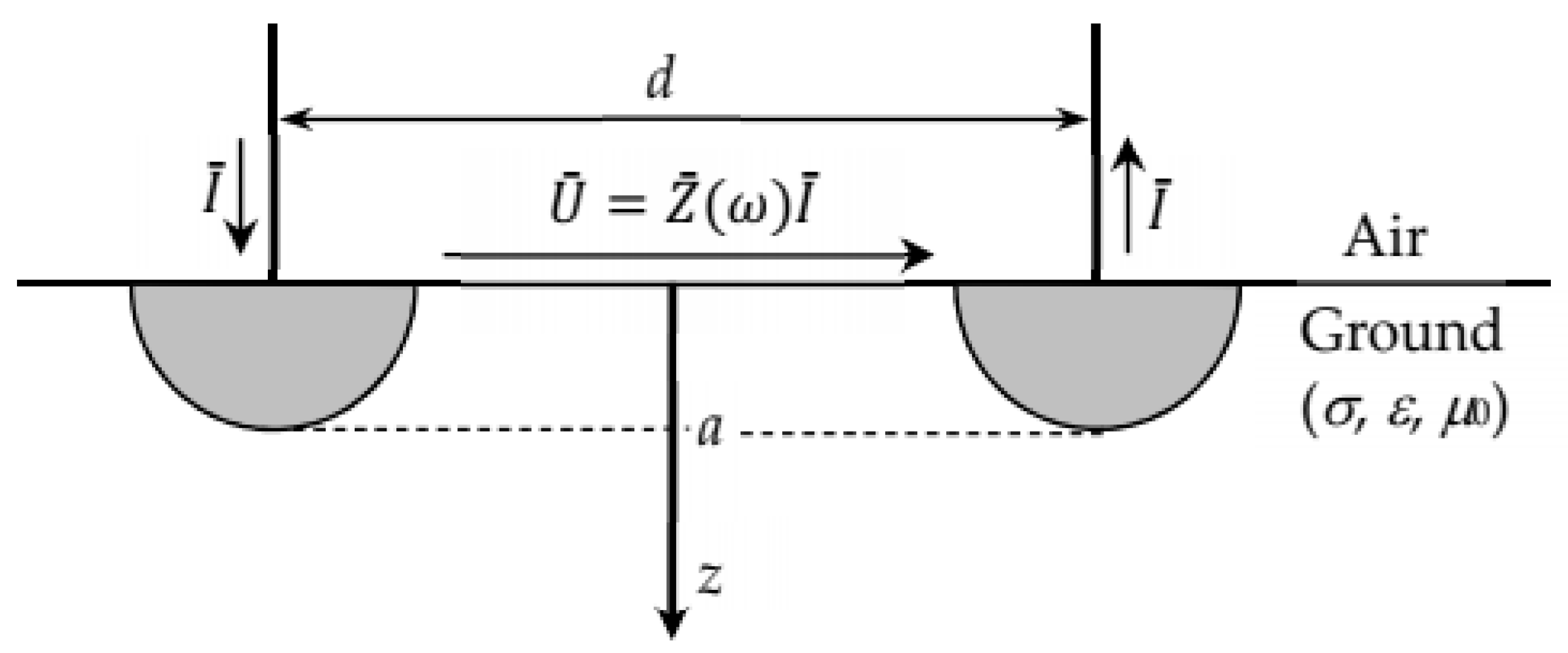
3. Grounding Impedance of a Pair of Hemispherical Electrodes
3.1. Simulation Experiments
- –
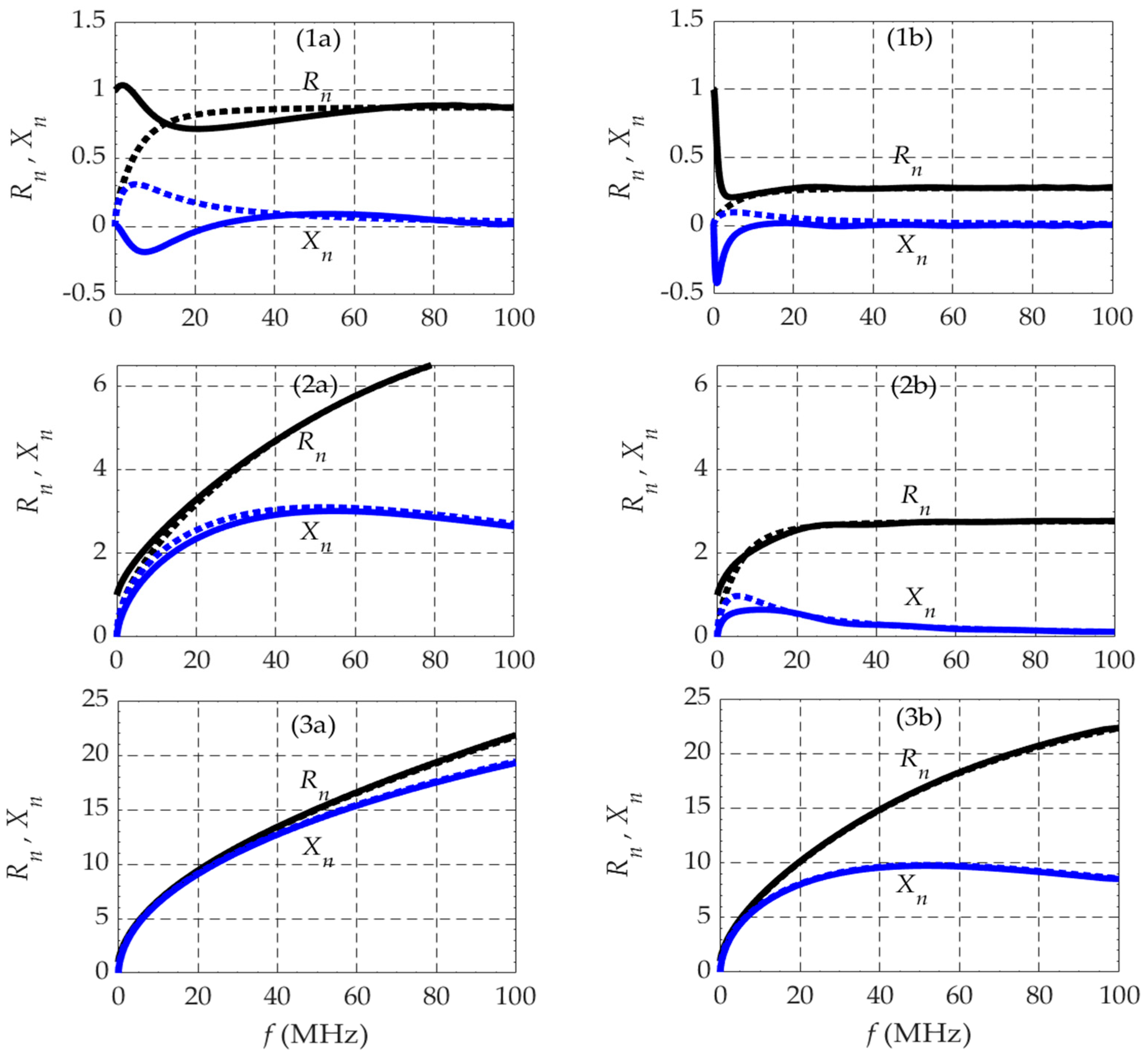
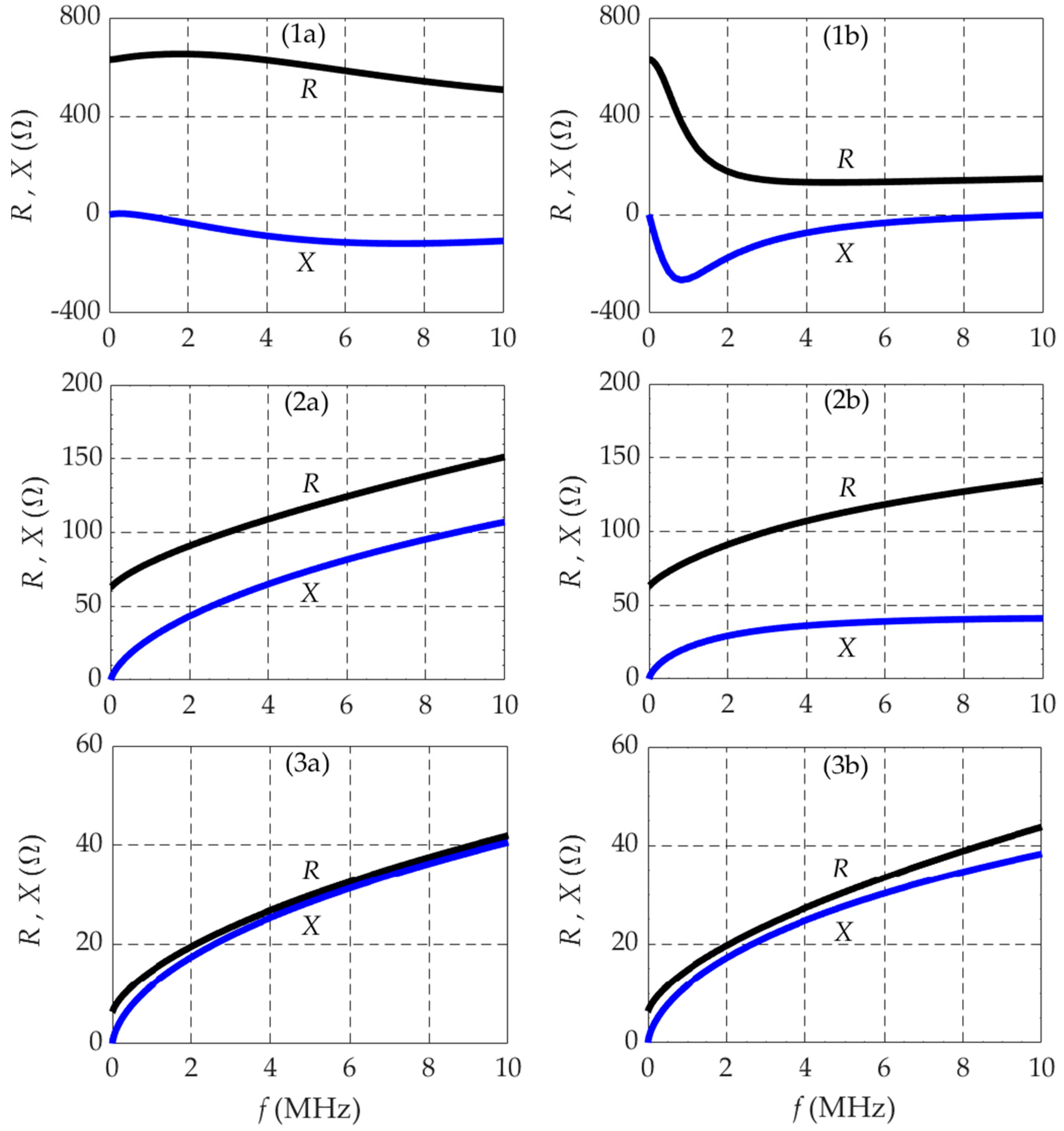
- For ω = 0, the impedance is purely real (X = 0), the value of R decreasing with increasing ground conductivity (case sequence 1-2-3).
- –
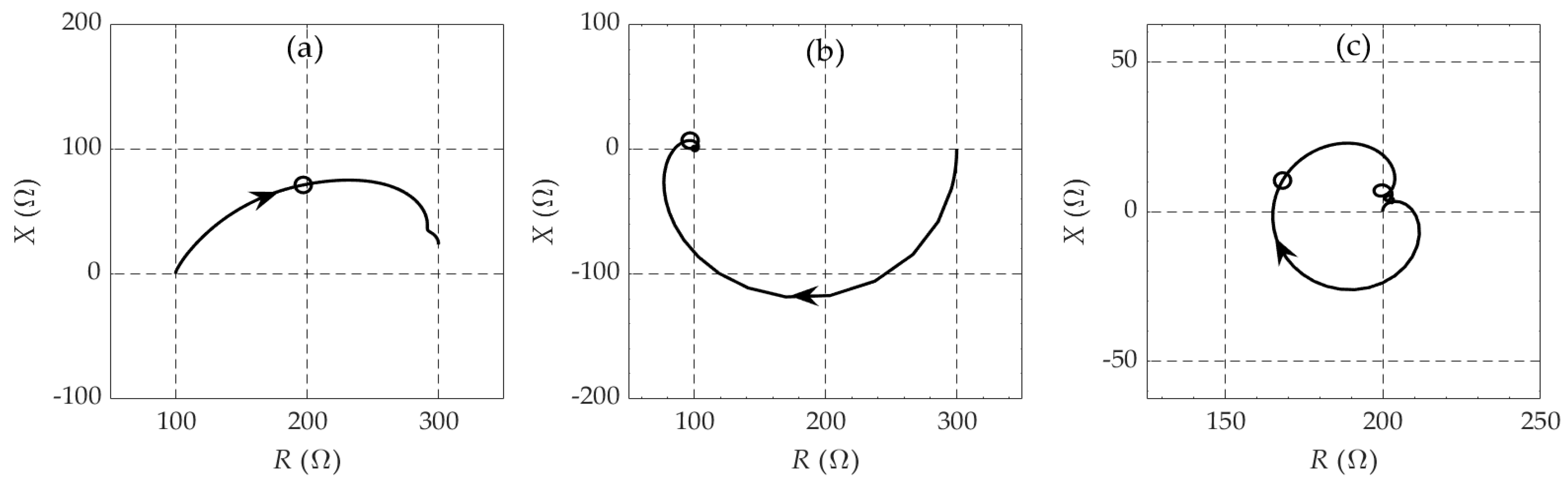
- The grounding impedance can be found in the 1st or 8th octants of the complex plane, i.e., R > |X| > 0. For dry soils (cases 1a and 1b), the impedance is found predominantly in the 8th octant, the reactance is negative, and the electrode system exhibits capacitive behavior, (We)av > (Wm)av. For moist and wet ground (cases 2a, 2b, and 3a, 3b), the impedance is found predominantly in the 1st octant, the reactance is predominantly positive, and the electrode system exhibits inductive behavior, (Wm)av > (We)av.
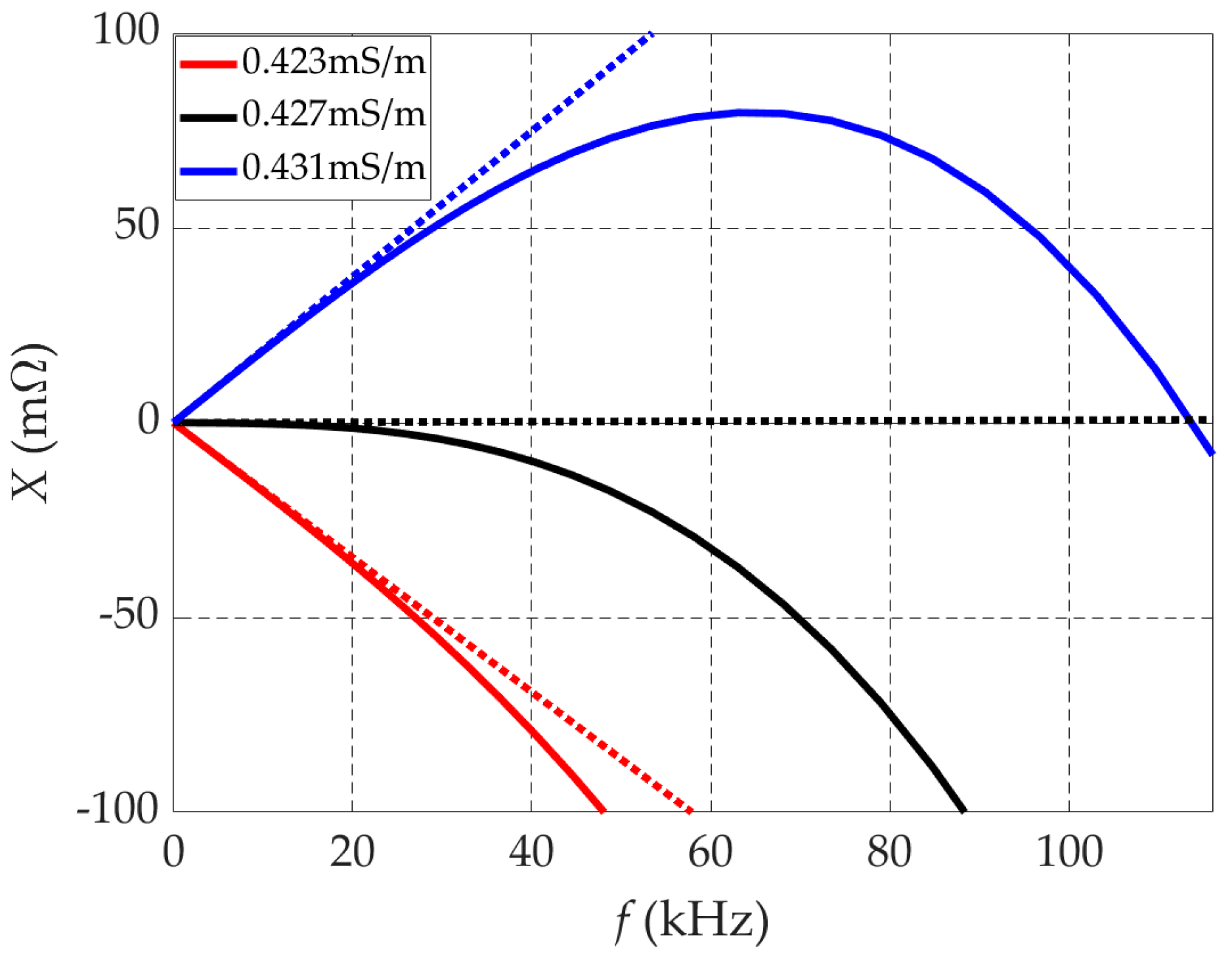
3.2. Low-Frequency Analysis
- –
- For dry soils (cases 1a and 1b) where Rdc is larger, the electrode impedance is practically real and constant, . The reactance, although very small, denotes capacitive behavior, which increases with the soil permittivity and with the frequency.
- –
- –
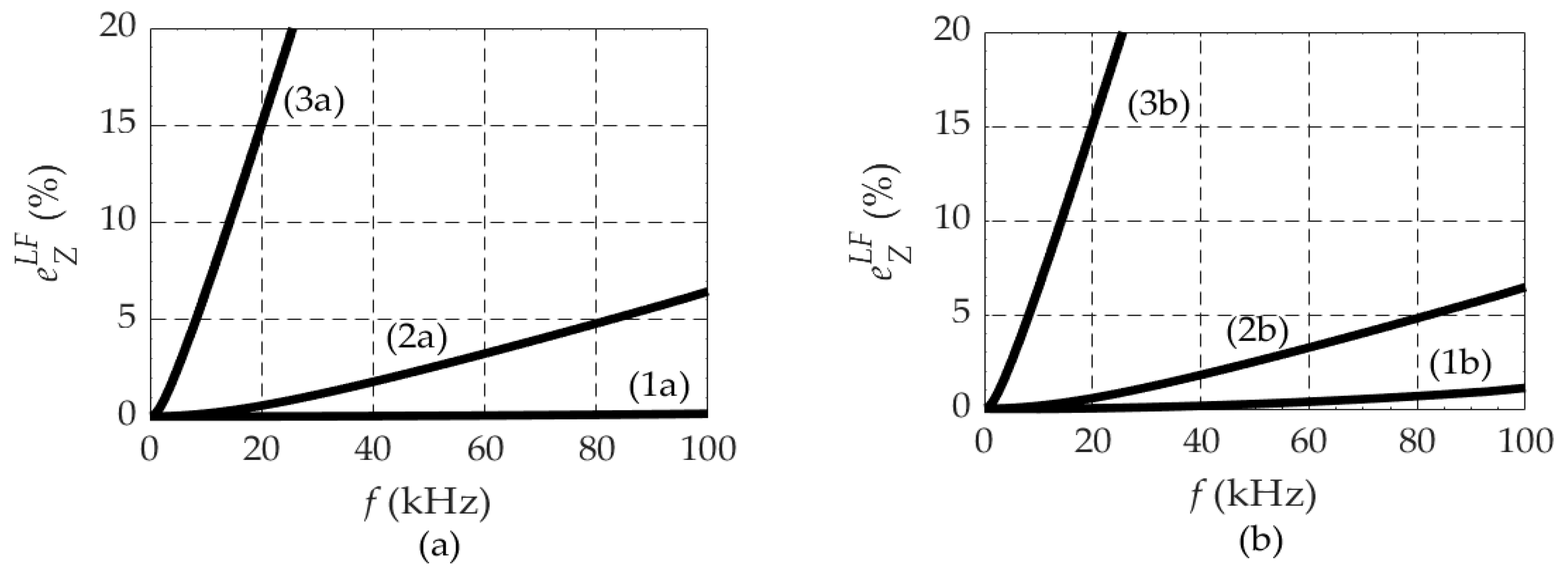
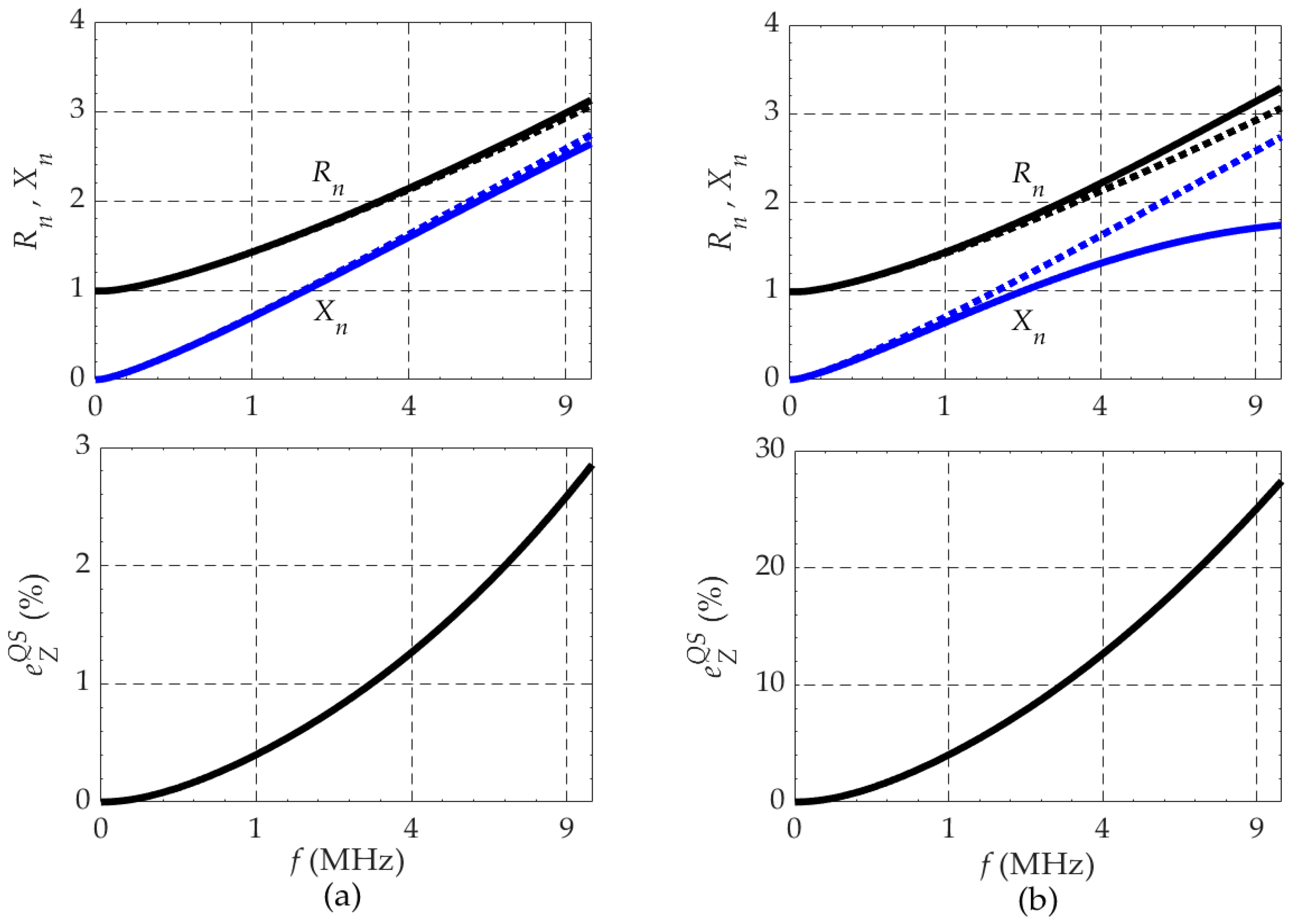
- The above comments also apply to wet soils (cases 3a and 3b), with the difference that the resistance and the reactance now significantly increase with the frequency.The accuracy and limits of the applicability of the LF approximation in (10) can be assessed by calculating the impedance relative error defined in (11), like in (6), that is,The information in Figure 8 was processed to enable the calculation of the impedance error in (11); the corresponding results are depicted in Figure 9 and show the following:
- –
- The error naturally increases with the frequency.
- –
- –
- The error is negligibly small for the case of dry soils, but significantly increases with increasing soil conductivity. While for moist soils (cases 2a, 2b) the error is smaller than 5% up to 80 kHz, for wet soils (cases 3a, 3b), the error exceeds 15% above 20 kHz.
3.3. High-Frequency Analysis
- –
- Comparing the curves in Figure 11 with the corresponding ones in Figure 7 (0–10 MHz), we see that the capacitive behavior for dry soils does change to inductive but above 10 MHz. Also, for moist and wet soils, the observed steady increase in the inductive reactance does not persist above 10 MHz; at some point, dX/dω turns negative.
- –
- As the frequency is progressively increased, the reactance seems to go to zero and the resistance to a constant value. This is particularly visible in the case of dry soils (cases 1a and 1b) where and .
- –
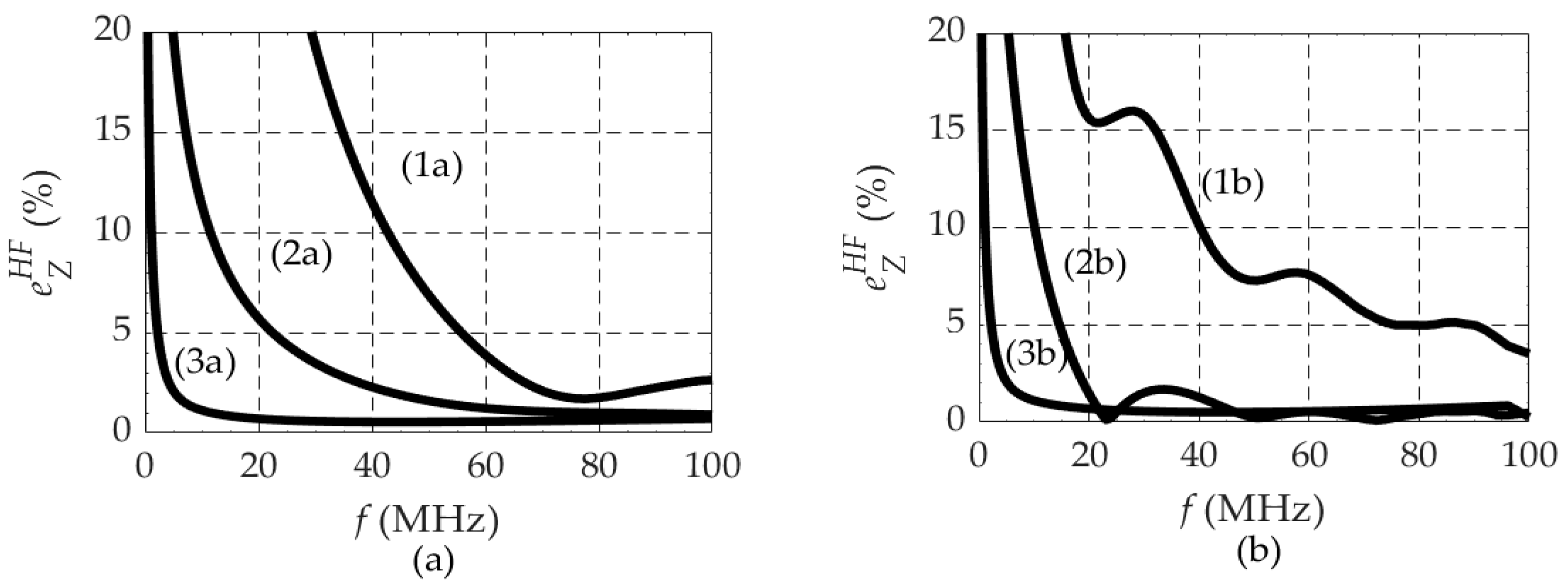
- The error naturally decreases with increasing frequency.
- –
- –
- For high frequencies, the error is negligibly small for the case of wet soils, but significantly increases with decreasing soil conductivity. While for moist soils (cases 2a, 2b) the error is smaller than 5% above 20 MHz, for dry soils (cases 1a, 1b), the error exceeds 10% below 40 MHz.
- –
- The ripple observed in the curves (1b) and (2b) for ε = 10ε0 can have two causes. It can be numerical, related to the discretization of the FEM mesh (not very likely, as we carefully tuned the mesh according to the depth of penetration of the field into the soil), or it can be factual, denoting that the impedance value oscillates when approaching its final value, as happens in softly mismatched transmission-line analysis.
4. Parametric Analysis in the Complex Plane
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Capacitance of an Ellipsoid
References
- Grcev, L.D. Modeling of grounding electrodes under lightning currents. IEEE Trans. Electromagn. Compat. 2009, 51, 559–571. [Google Scholar] [CrossRef]
- Grcev, L. High frequency grounding. In Lightning Protection; Cooray, V., Ed.; IET: London, UK, 2010; Chapter 10; pp. 503–529. [Google Scholar]
- Visacro, S.; Alipio, R.; Vale, M.H.; Pereira, C. The response of grounding electrodes to lightning currents: The effect of frequency dependent soil resistivity and permittivity. IEEE Trans. Electromagn. Compat. 2011, 53, 401–406. [Google Scholar] [CrossRef]
- Grcev, L.D.; Kuhar, A.; Arnautovski-Toseva, V.; Markovski, B. Evaluation of high-frequency circuit models for horizontal and vertical grounding electrodes. IEEE Trans. Power Del. 2018, 33, 3065–3074. [Google Scholar] [CrossRef]
- Salarieh, B.; Silva, J.H.M.; Kordi, B. Wideband EMT- compatible model for grounding electrodes buried in frequency dependent soil. In Proceedings of the International Conference on Power Systems Transients (IPST2019), Perpignan, France, 17–20 June 2019. [Google Scholar]
- Salarieh, B.; Silva, J.H.M.; Kordi, B. Electromagnetic transient modeling of grounding electrodes buried in frequency dependent soil with variable water content. Electr. Power Syst. Res. 2020, 189, 106595. [Google Scholar] [CrossRef]
- Sherif, O.; Robson, S.; Harid, N.; Thorpe, D.; Haddad, A. On the behavior of vertical ground electrodes under high frequency currents. In Proceedings of the 2022 International Conference on Advanced Electrical Engineering, Constantine, Algeria, 29–31 October 2022. [Google Scholar] [CrossRef]
- Azevedo, W.M.; Araujo, A.J.; Filho, J.P. On the transient behaviour of vertical grounding electrodes buried in soils with frequency-dependent electrical parameters. In Proceedings of the 2023 International Conference on Industry Applications, Sao Paulo, Brazil, 22–24 November 2023. [Google Scholar] [CrossRef]
- Visacro, S.; Alipio, R. Frequency dependence of soil parameters: Experimental results, predicting formula and influence on the lightning response of grounding electrodes. IEEE Trans. Power Del. 2012, 27, 927–935. [Google Scholar] [CrossRef]
- Cavka, D.; Mora, N.; Rachidi, F. A comparison of frequency-dependent soil models: Application to the analysis of grounding systems. IEEE Trans. Electromagn. Compat. 2014, 56, 177–187. [Google Scholar] [CrossRef]
- Olsen, R.G.; Grcev, L.D. Analysis of high-frequency grounds: Comparison of theory and experiment. IEEE Trans. Ind. Appl. 2015, 51, 4889–4899. [Google Scholar] [CrossRef]
- Sunjerga, A.; Gazzana, D.S.; Poljak, D.; Karami, H.; Sheshyekani, K.; Rubinstein, M.; Rachidi, F. Tower and path-dependent voltage effects on the measurement of grounding impedance for lightning studies. IEEE Trans. Electromagn. Compat. 2019, 61, 409–418. [Google Scholar] [CrossRef]
- Datsios, Z.G.; Mikropoulos, P.N.; Staikos, E.T. Methods for field measurement of the frequency-dependent soil electrical properties: Evaluation of electrode arrangements through FEM computations. In Proceedings of the 21st International Symposium on High Voltage Engineering, Budapest, Hungary, 2019; Lecture Notes in Electrical Engineering; Springer: Cham, Switzerland, 2019; Volume 598. [Google Scholar] [CrossRef]
- Tan, K.B.; Lu, H.M.; Zhang, Y.; Zuo, W.C. Analysis of the grounding resistance of a hemispheric electrode located on a truncated cone. IEEE Trans. Electromagn. Compat. 2020, 62, 1361–1363. [Google Scholar] [CrossRef]
- Sunjerga, A.; Rubinstein, M.; Poljak, D.; Karami, H.; Rachidi, F. Grounding resistance of a hemispheric electrode located on the top of a finite-height, cone-shaped mountain. IEEE Trans. Electromagn. Compat. 2020, 62, 1889–1892. [Google Scholar] [CrossRef]
- Faria, J.B.; Pedro, M.E.; Machado, V.M. The complex impedance of the hemispherical ground electrode: An open analytical problem. Energies 2023, 16, 7062. [Google Scholar] [CrossRef]
- Machado, V.M.; Fernandes, J.P.; Pedro, M.E.; Faria, J.B. Numerical evaluation of the frequency-dependent impedance of hemispherical ground electrodes through finite element analysis. Energies 2024, 17, 452. [Google Scholar] [CrossRef]
- Sunjerga, A.; Rubinstein, M.; Poljak, D.; Despalatovic, M.; Petrovic, G.; Rachidi, F. High-frequency response of a hemispherical grounding electrode. Elect. Power Syst. Res. 2024, 226, 109877. [Google Scholar] [CrossRef]
- Faria, J.B.; Machado, V.M. Comments on the high-frequency response of hemispherical grounding electrodes with emphasis on magnetic induction effects. Elect. Power Syst. Res. 2024; submitted for publication. [Google Scholar]
- Meera, K.S.; Patro, S.K. Switching and power frequency transients in EHV systems: A review and case study. Power Res. J. CPRI 2014, 10, 1–10. [Google Scholar]
- Sun, Q.; Zhang, Z.; Gao, W.; Ding, D.; Ge, Y.; Qu, J. Accurate and rapid 3D full-Maxwell simulations of very fast transients in GIS based on a novel busbar voltage setting method. IEEE Trans. Power Del. 2024; published in early access. [Google Scholar] [CrossRef]
- Shumpert, T.H. Capacitance calculations for satellites: Part I. Isolated capacitances of ellipsoidal shapes with comparisons to some other simple bodies. Sens. Simul. Notes 1972, 157, 1–30. [Google Scholar]
- Kraniotis, G.V.; Leontaris, G.K. Closed form solution for the surface area, the capacitance and the demagnetizing factors of the ellipsoid. arXiv 2013, arXiv:1306.0509v1. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ε = ε0 | ε = 10 ε0 | |||||
| σ (mS/m) | 0.5 | 5.0 | 50 | 0.5 | 5.0 | 50 |
| Cdc (pF) | 28.06 | 280.6 | ||||
| Ldc (μH) | 15.30 | |||||
| Rdc (Ω) | 630.3 | 63.03 | 6.303 | 630.3 | 63.03 | 6.303 |
| η | 0.853 | 0.085 | 0.009 | 2.699 | 0.270 | 0.027 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brandão Faria, J.; Fernandes, J.P.; Maló Machado, V.; Pedro, M.E. Frequency-Dependent Grounding Impedance of a Pair of Hemispherical Electrodes: Inductive or Capacitive Behavior? Energies 2024, 17, 3206. https://doi.org/10.3390/en17133206
Brandão Faria J, Fernandes JP, Maló Machado V, Pedro ME. Frequency-Dependent Grounding Impedance of a Pair of Hemispherical Electrodes: Inductive or Capacitive Behavior? Energies. 2024; 17(13):3206. https://doi.org/10.3390/en17133206
Chicago/Turabian StyleBrandão Faria, José, João Pereira Fernandes, Vitor Maló Machado, and Maria Eduarda Pedro. 2024. "Frequency-Dependent Grounding Impedance of a Pair of Hemispherical Electrodes: Inductive or Capacitive Behavior?" Energies 17, no. 13: 3206. https://doi.org/10.3390/en17133206
APA StyleBrandão Faria, J., Fernandes, J. P., Maló Machado, V., & Pedro, M. E. (2024). Frequency-Dependent Grounding Impedance of a Pair of Hemispherical Electrodes: Inductive or Capacitive Behavior? Energies, 17(13), 3206. https://doi.org/10.3390/en17133206