
Comparison of Power Coefficients in Wind Turbines Considering the Tip Speed Ratio and Blade Pitch Angle

 ,
,
Abstract
1. Introduction
2. Power and Torque in a Wind Turbine
3. Power Coefficient and Torque Coefficient
- Polynomial functions
- Sinusoidal functions
- Exponential functions
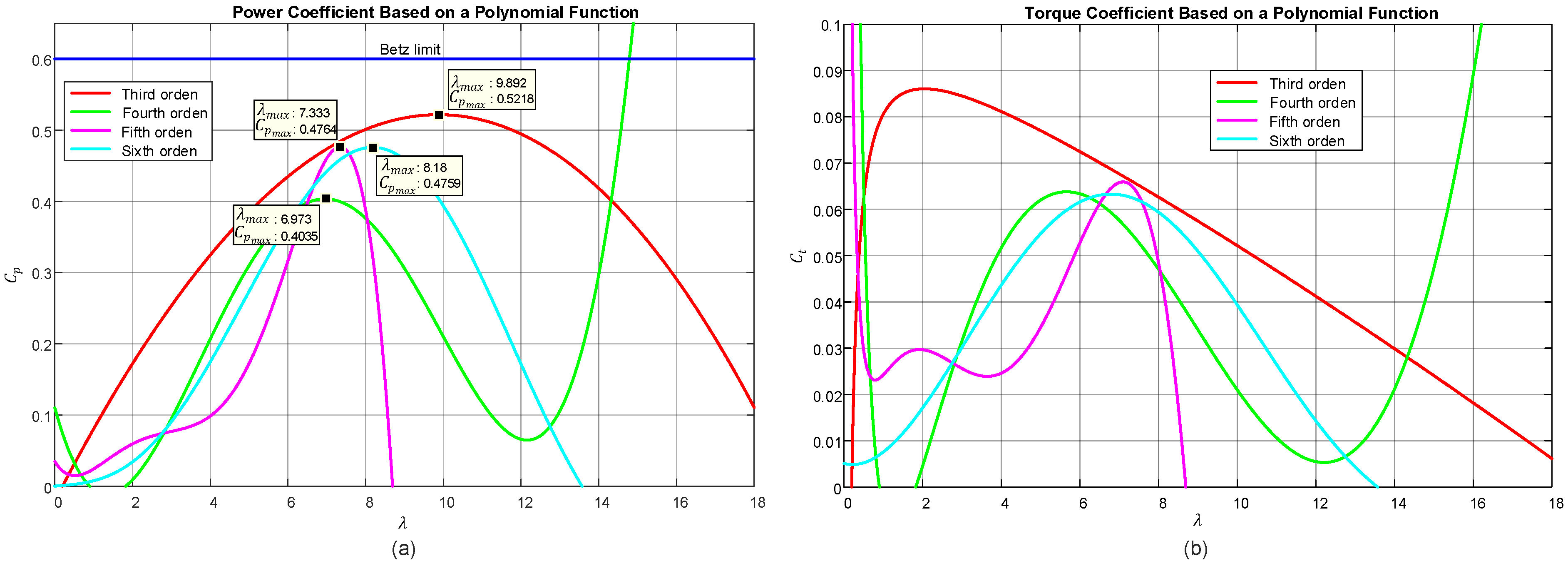
3.1. Polynomial Function
3.1.1. Third-Order Polynomial Function
3.1.2. Fourth-Order Polynomial Function
3.1.3. Fifth-Order Polynomial Function
3.1.4. Sixth-Order Polynomial Function
3.1.5. General Exponential Function
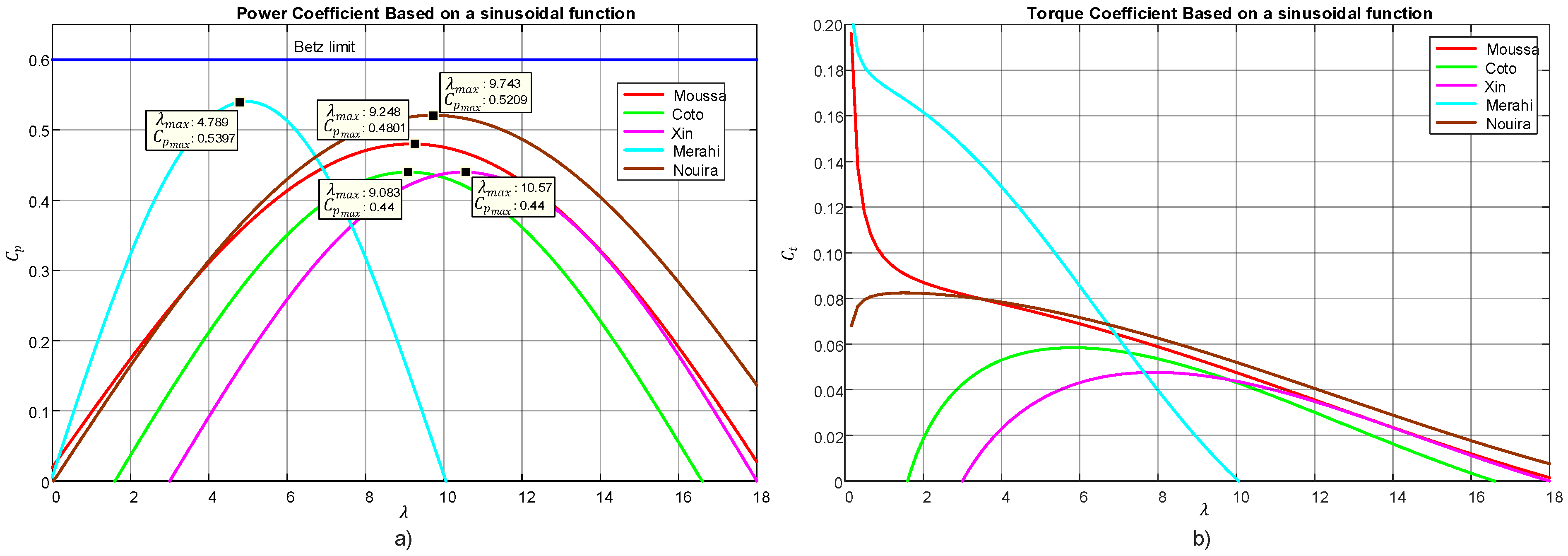
3.2. Sinusoidal Function
3.2.1. Moussa, Bouallegue, and Kehedher [19]
3.2.2. Coto, García, Díaz, and Gómez [27]
3.2.3. Xin, Wanli, Bin, and Pengcheng [28]
3.2.4. Merahi, Mekhilef, and Madjid [29]
3.2.5. Nouira and Khedher [18]
3.2.6. General Sinusoidal Function
3.3. Exponencial Function
3.3.1. Kotti, Janakiraman, and Shireen [30,31]
3.3.2. Khajuria and Kaur [32]
3.3.3. Ovando, Aguayo and Cotorogea [33,34,35,36,37,38,39,40,41]
3.3.4. Feng Gao, Da-Ping Xui, and Yue-Gang Lv [42,43,44,45,46,47]
3.3.5. Llano, Tatlow, and McMahon [48]
3.3.6. Shi, Zhu, Cai, Wang, and Yao [49,50]
3.3.7. Bustos, Vargas, Milla, Saez, Zareipour, and Nuñez [51]
3.3.8. Ahmed, Karim, and Ahmad [52]
3.3.9. General Exponential Function
4. Discussion
4.1. Discussion Considering Variations of λ and β = 0
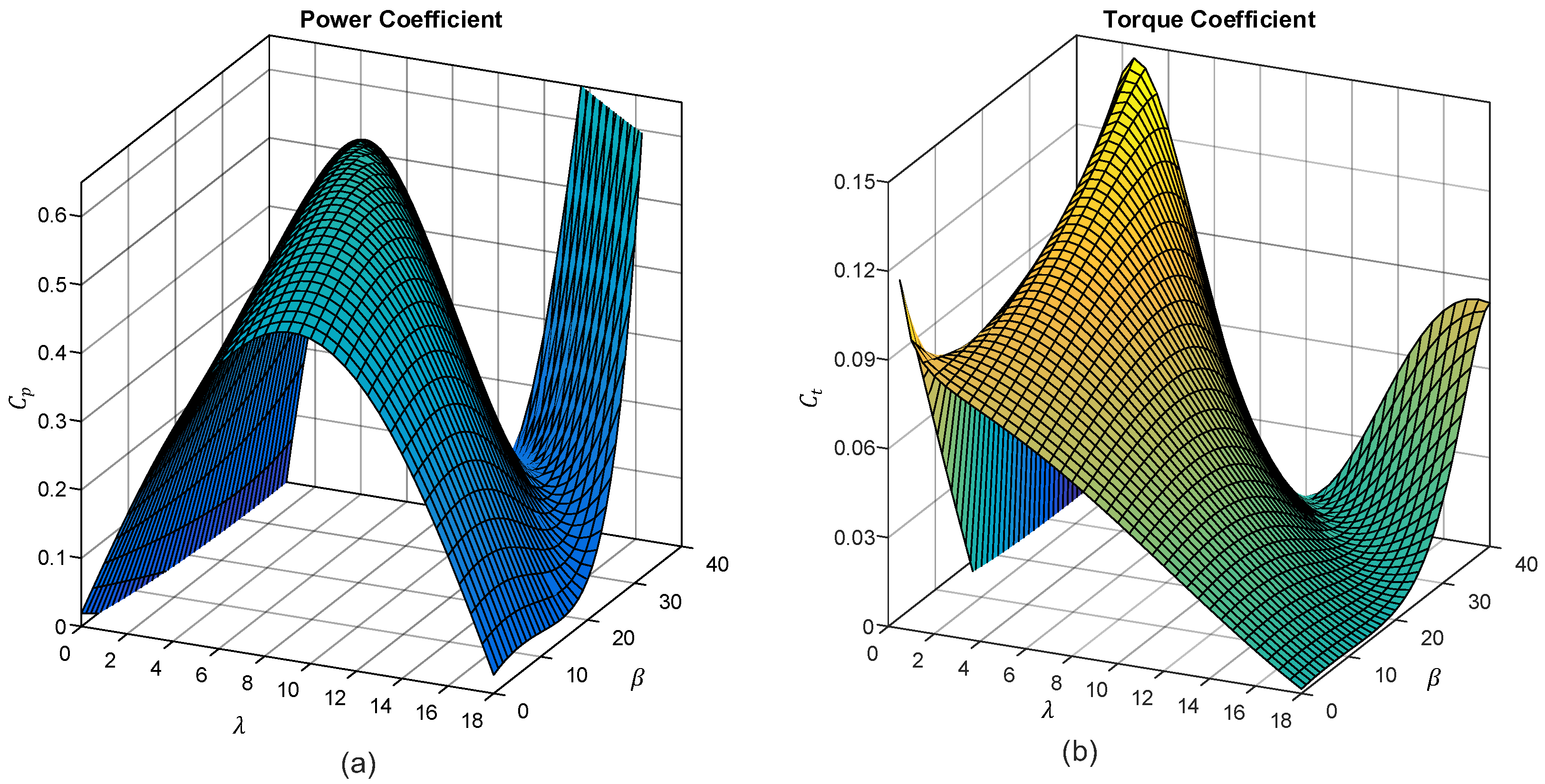
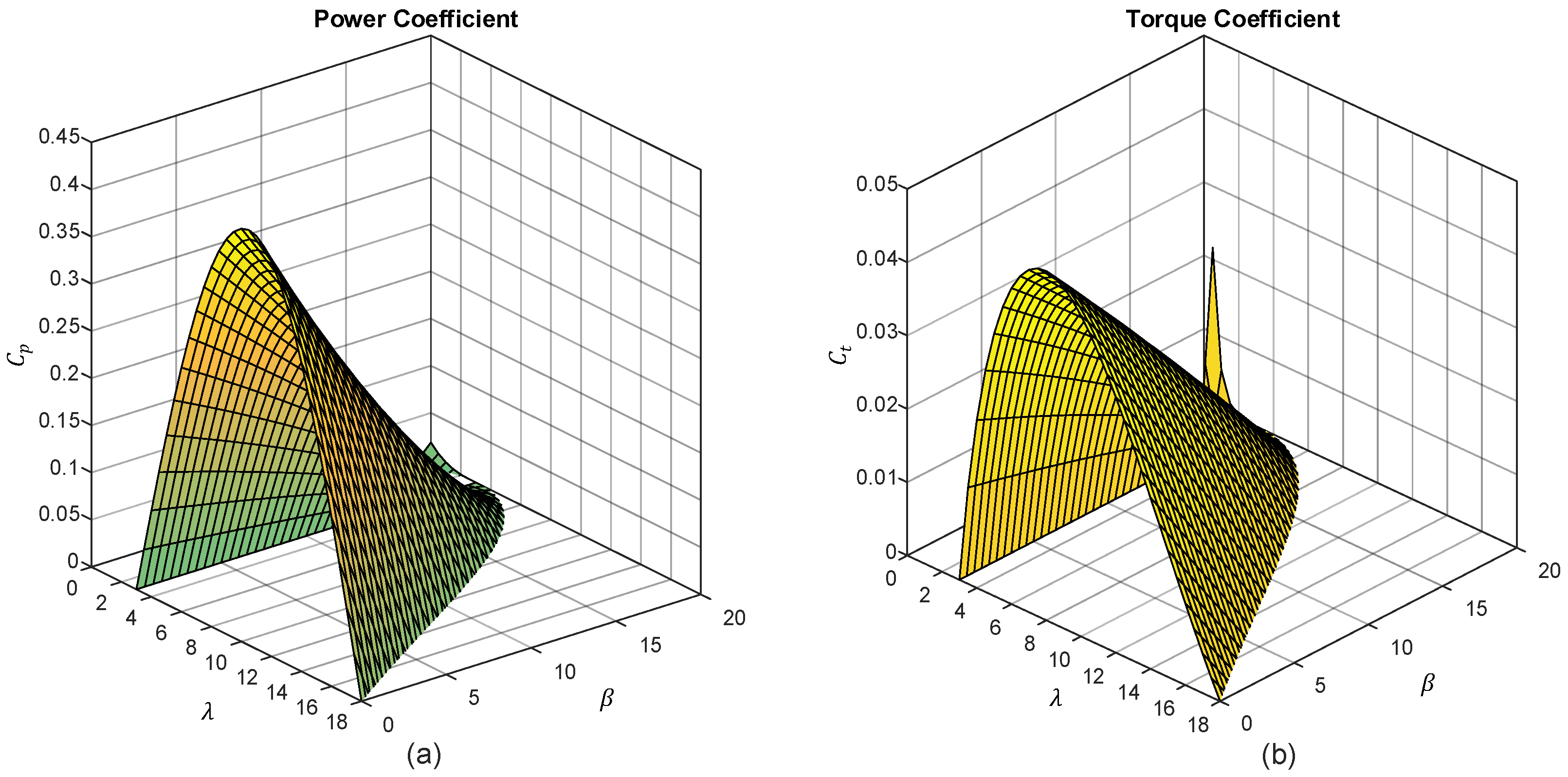
4.2. Discussion Considering Both Variations of λ and β
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qadir, S.A.; Al-Motairi, H.; Tahir, F.; Al-Fagih, L. Incentives and strategies for financing the renewable energy transition: A review. Energy Rep. 2021, 7, 3590–3606. [Google Scholar] [CrossRef]
- Liu, Y.; Dong, K.; Jiang, Q. Assessing energy vulnerability and its impact on carbon emissions: A global case. Energy Econ. 2023, 119, 106557. [Google Scholar] [CrossRef]
- Al-Shetwi, A.Q. Sustainable development of renewable energy integrated power sector: Trends, environmental impacts, and recent challenges. Sci. Total Environ. 2022, 822, 153645. [Google Scholar] [CrossRef] [PubMed]
- Androniceanu, A.; Sabie, O.M. Overview of Green Energy as a Real Strategic Option for Sustainable Development. Energies 2022, 15, 8573. [Google Scholar] [CrossRef]
- Chudy-Laskowska, K.; Pisula, T. An Analysis of the Use of Energy from Conventional Fossil Fuels and Green Renewable Energy in the Context of the European Union’s Planned Energy Transformation. Energies 2022, 15, 7369. [Google Scholar] [CrossRef]
- Arenas-López, J.P.; Badaoui, M. Analysis of the offshore wind resource and its economic assessment in two zones of Mexico. Sustain. Energy Technol. Assess. 2022, 52, 101997. [Google Scholar] [CrossRef]
- Jung, C.; Schindler, D. Efficiency and effectiveness of global onshore wind energy utilization. Energy Convers. Manag. 2023, 280, 116788. [Google Scholar] [CrossRef]
- Elgendi, M.; AlMallahi, M.; Abdelkhalig, A.; Selim, M.Y.E. A review of wind turbines in complex terrain. Int. J. Thermofluids 2023, 17, 100289. [Google Scholar] [CrossRef]
- Li, M.; Yang, Y.; He, Z.; Guo, X.; Zhang, R.; Huang, B. A wind speed forecasting model based on multi-objective algorithm and interpretability learning. Energy 2023, 269, 126778. [Google Scholar] [CrossRef]
- Arent, D.J.; Green, P.; Abdullah, Z.; Barnes, T.; Bauer, S.; Bernstein, A.; Berry, D.; Burrell, T.; Carpenter, B.; Cochran, J.; et al. Challenges and opportunities in decarbonizing the U.S. energy system. Renew. Sustain. Energy Rev. 2022, 169, 112939. [Google Scholar] [CrossRef]
- Mayilsamy, G.; Palanimuthu, K.; Venkateswaran, R.; Antonysamy, R.P.; Lee, S.R.; Song, D.; Joo, Y.H. A Review of State Esti-mation Techniques for Grid-Connected PMSG-Based Wind Turbine Systems. Energies 2023, 16, 634. [Google Scholar] [CrossRef]
- Rekioua, D. Wind Power Electric Systems; Springer: London, UK, 2014. [Google Scholar]
- IEC 61400-12-1 Ed 1; Wind Turbines—Part 12-1: Power Performance, Measurements of Electricity Producing Wind Turbines. IEC: Geneva, Switzerland, 2005.
- Xia, Y.; Ahmed, K.H.; Williams, B.W. Wind turbine power coefficient analysis of a new maximum power point tracking technique. IEEE Trans. Ind. Electron. 2013, 60, 1122–1132. [Google Scholar] [CrossRef]
- Hwangbo, H.; Johnson, A.; Ding, Y. A production economics analysis for quantifying the efficiency of wind turbines. Wind Energy 2017, 20, 1501–1513. [Google Scholar] [CrossRef]
- Niu, B.; Hwangbo, H.; Zeng, L.; Ding, Y. Evaluation of alternative power production efficiency metrics for offshore wind turbines and farms. Renew. Energy 2018, 128, 81–90. [Google Scholar] [CrossRef]
- Lubosny, Z. Wind Turbine Operation in Electric Power Systems; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Nouira, I.; Khedher, A.; Bouallegue, A. A contribution to the design and the installation of an universal platform of a wind emulator using a DC motor. Int. J. Renew. Energy Res. 2012, 2, 797–804. [Google Scholar]
- Moussa, I.; Bouallegue, A.; Khedher, A. Desing and Implementation of constant wind speed turbine emulator using Matlab/simulink and FPGA. In Proceedings of the 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 25–27 March 2014. [Google Scholar]
- Moussa, I.; Bouallegue, A.; Khedher, A. New wind turbine emulator based on DC machine: Hardware implementation using FPGA board for an open-loop operation. IET Circuits Devices Syst. 2019, 13, 896–9021. [Google Scholar] [CrossRef]
- Arifujjaman, M.; Iqbal, M.; Quaicoe, J.E. Maximum Power Extraction from a Small Wind Turbine Emulator using a DC-DC Converter Controlled by a Microcontroller. In Proceedings of the 2006 International Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 19–21 December 2006; pp. 213–216. [Google Scholar]
- Bhayo, M.A.; Yatim, A.H.M.; Khokhar, S.; Aziz, M.J.A.; Idris, N.R.N. Modeling of Wind Turbine Simulator for analysis of the wind energy conversion system using MATLAB/Simulink. In Proceedings of the 2015 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 19–20 October 2015; pp. 122–127. [Google Scholar]
- González, L.G.; Figueres, E.; Garcera, G.; Carranza, O. Maximum-power-point tracking with reduced mechanical stress applied to wind-energy-conversion-systems. Appl. Energy 2010, 87, 2304–2312. [Google Scholar] [CrossRef]
- Memije, D.; Rodríguez, J.J.; Carranza, O.; Ortega, R. Improving the performance of MPPT in a wind generation system using a wind speed estimation by Newton Raphson. In Proceedings of the IEEE International Autumn Meeting on Power, Electronics and Computing, ROPEC 2016, Ixtapa, Mexico, 9–11 November 2016. [Google Scholar]
- Li, W.; Xu, D.; Zhang, W.; Ma, H. Research on Wind Turbine Emulation based on DC Motor. In Proceedings of the 2007 Second IEEE Conference on Industrial Electronics and Applications, Harbin, China, 23–25 May 2007. [Google Scholar]
- Diaz, S.A.; Silva, C.; Juliet, J.; Miranda, H.A. Indirect sensorless speed control of a PMSG for wind application. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, IEMDC ‘09, Miami, FL, USA, 3–6 May 2009; pp. 1844–1850. [Google Scholar]
- Coto, J.; Garcia, M.; Diaz, G.; Gomez, J. Wind speed model design and dynamic simulation of a wind farm embedded on distribution networks. Renew. Energy Power Qual. J. 2003, 1, 341–348. [Google Scholar]
- Xin, W.; Wanli, Z.; Bin, Q.; Pengcheng, L. Sliding mode control of pitch angle for direct driven PM Wind turbine. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 2447–2452. [Google Scholar]
- Merahi, F.; Mekhilef, S.; Berkouk, E.M. DC-Voltage regulation of a five levels neutral point clamped cascaded for wind energy conversion system. In Proceedings of the 2014 International Power Electronics Conference, Hiroshima, Japan, 18–21 May 2014. [Google Scholar]
- Kotti, R.; Janakiraman, S.; Shireen, W. Adaptive sensorless Maximum Power Point Tracking control for PMSG Wind Energy Conversion Systems. Paper P1-41. In Proceedings of the 2014 IEEE 15th Workshop on Control and Modeling for Power Electronics (COMPEL), Santander, Spain, 22–25 June 2014; pp. 1–8. [Google Scholar]
- Barzola, J.; Simonetti, D.L.; Fardin, J.F. Energy storage systems for power oscillation damping in distributed generation based on wind turbines with PMSG. In Proceedings of the 2015 CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Santiago, Chile, 28–30 October 2015; pp. 655–660. [Google Scholar]
- Khajuria, S.; Kaur, J. Implementation of pitch control of wind turbine using Simulink (Matlab). Int. J. Adv. Res. Comput. Eng. Technol. 2012, 1, 196–200. [Google Scholar]
- Ovando, R.I.; Aguayo, J.; Cotorogea, M. Emulation of a low power wind turbine with a DC motor in Matlab/Simulink. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007. [Google Scholar]
- Cao, R.; Lu, L.; Xie, Z.; Zhang, X.; Yang, S. A dynamic wind turbine simulator of the wind turbine generator system. In Proceedings of the International Conference on Intelligent System Design and Engineering Application, Sanya, China, 6–7 January 2012. [Google Scholar]
- Jin, Z.; Li, F.; Ma, X.; Djouadi, S.M. Semi-Definite Programming for Power Output Control in a Wind Energy Conversion System. IEEE Trans. Sustain. Energy 2014, 5, 466–475. [Google Scholar] [CrossRef]
- Aree, P.; Lhaksup, S. Dynamic simulation of self-excited induction generator feeding motor load using Matlab/Simulink. In Proceedings of the 2014 11th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Nakhon Ratchasima, Thailand, 14–17 May 2014; pp. 1–6. [Google Scholar]
- Duman, S.; Yorukeren, N.; Altas, I.H.; Sharaf, A.M. A novel FACTS based on modulated power filter compensator for wind-grid energy systems. In Proceedings of the IEEE 5th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Galway, Ireland, 24–27 June 2014. [Google Scholar]
- Cultura, A.B.; Salameh, Z.M. Modeling and simulation of a wind turbine-generator system. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–7. [Google Scholar]
- Guo, Y.; Hosseini, S.H.; Jiang, J.N.; Tang, C.Y.; Ramakumar, R.G. Voltage/Pitch control for maximization and regulation of active/reactive powers in wind turbines with uncertainties. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 3956–3963. [Google Scholar]
- Hamane, B.; Doumbia, M.L.; Bouhamida, M.; Benghanem, M. Control of wind turbine based on DFIG using Fuzzy-PI and Sliding Mode controllers. In Proceedings of the 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 25–27 May 2014; pp. 1–8. [Google Scholar]
- Guo, Y.; Hosseini, S.H.; Tang, C.Y.; Jiang, J.N. An approximate model of wind turbine control systems for wind farm power control. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–7. [Google Scholar]
- Gao, F.; Xu, D.P.; Lv, Y.G. Hybrid automaton modeling and global control of wind turbine generator. In Proceedings of the Seventh International Conference on Machine Learning and Cybernetics, Kunming, China, 12–15 July 2008. [Google Scholar]
- Bagh, S.; Samuel, P.; Sharma, R.; Banerjee, S. Emulation of static and dynamic characteristics of a Wind turbine using Matlab/Simulink. In Proceedings of the 2012 2nd International Conference on Power, Control and Embedded Systems, Allahabad, India, 17–19 December 2012; pp. 1–6. [Google Scholar]
- Yin, M.; Li, G.; Zhou, M.; Zhao, C. Modeling of the wind turbine with a permanent magnet synchronous generator for integration. In Proceedings of the IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Shi, Q.; Wang, G.; Fu, L.; Yuan, L.; Huang, H. State-space averaging model of wind turbine with PMSG and its virtual inertia control. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1880–1886. [Google Scholar]
- Chen, J.; Wu, H.; Sun, M.; Jiang, W.; Cai, L.; Guo, C. Modeling and simulation of directly driven wind turbine with permanent magnet synchronous generator. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Tianjin, China, 21–24 May 2012; pp. 1–5. [Google Scholar]
- Chen, J.; Jiang, D. Study on modeling and simulation of non-grid-connected wind turbine. In Proceedings of the 2009 World Non-Grid-Connected Wind Power and Energy Conference, Nanjing, China, 24–26 September 2009; pp. 1–5. [Google Scholar]
- Llano, D.; Tatlow, M.; McMahon, R. Control algorithms for permanent magnet generators evaluated on a wind turbine emulator test-ring. In Proceedings of the 7th IET International Conference on Power Electronics, Manchester, UK, 6–7 October 2014. [Google Scholar]
- Shi, G.; Zhu, M.; Cai, X.; Wang, Z.; Yao, L. Generalized average model of DC wind turbine with consideration of electrome-chanical transients. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE, Vienna, Austria, 10–13 November 2013. [Google Scholar]
- Boukettaya, G.; Naifar, O.; Ouali, A. A vector control of a cascaded doubly fed induction generator for a wind energy conversion system. In Proceedings of the 2014 IEEE 11th International Multi-Conference on Systems, Signals & Devices (SSD14), Barcelona, Spain, 11–14 February 2014; pp. 1–7. [Google Scholar]
- Bustos, G.; Vargas, L.S.; Milla, F.; Saez, D.; Zareipour, H.; Nunez, A. Comparison of fixed speed wind turbines models: A case study. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 961–966. [Google Scholar]
- Ahmed, D.; Karim, F.; Ahmad, A. Design and modeling of low-speed axial flux permanent magnet generator for wind based micro-generation systems. In Proceedings of the 2014 International Conference on Robotics and Emerging Allied Technologies in Engineering (iCREATE), Islamabad, Pakistan, 22–24 April 2014; pp. 51–57. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constants | Third | Fourth | Fifth | Sixth |
|---|---|---|---|---|
| −0.02086 | 0.11 | 0.0344 | 0.0051 | |
| 0.1063 | −0.2 | −0.0864 | −0.0022 | |
| −0.004834 | 0.097 | 0.1168 | 0.0052 | |
| −3.7 × 10−5 | −0.012 | −0.0484 | −5.1425 × 10−4 | |
| 0 | 0.00044 | 0.00832 | −2.795 × 10−5 | |
| 0 | 0 | −0.00048 | 4.6313 × 10−6 | |
| 0 | 0 | 0 | −1.331 × 10−7 |
| Constants | Moussa | Coto | Xin | Merahi | Nouira |
|---|---|---|---|---|---|
| 0.5 | 0.44 | 0.44 | 0.5 | 0.5 | |
| −0.00167 | 0 | −0.00167 | −0.00167 | 0.00167 | |
| −2 | 0 | 0 | −2 | −2 | |
| 0.1 | −1.6 | −3 | 0.1 | 0.1 | |
| 18.5 | 15 | 15 | 10 | 18.5 | |
| −0.3 | 0 | −0.3 | −0.3 | −0.3 | |
| −2 | 0 | 0 | 0 | −2 | |
| 0.00184 | 0 | 0.00184 | −0.00184 | −0.00184 | |
| −3 | 0 | −3 | −3 | −3 | |
| −2 | 0 | 0 | −2 | −2 |
| Constants | Kotti | Khajuria | Ovando | Feng | Llano | Shi | Bustos | Ahmed |
|---|---|---|---|---|---|---|---|---|
| 0.5 | 0.5 | 0.5176 | 0.22 | 0.5 | 0.73 | 0.44 | 1 | |
| 116 | 116 | 116 | 116 | 72.5 | 151 | 124.99 | 110 | |
| 0 | 0.4 | 0.4 | 0.4 | 0.4 | 0.58 | 0.4 | 0.4 | |
| 0.4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0 | 0.002 | 0 | 0.002 | |
| 0 | 0 | 0 | 0 | 0 | 2.14 | 0 | 2.2 | |
| 5 | 5 | 5 | 5 | 5 | 13.2 | 6.94 | 9.6 | |
| 21 | 21 | 21 | 12.5 | 13.125 | 18.4 | 17.05 | 18.4 | |
| 0 | 0 | 0.0068 | 0 | 0 | 0 | 0 | 0 | |
| 0.008 | 0 | 0.08 | 0.08 | 0.08 | 0.02 | 0.08 | 0.02 | |
| 0 | 0.088 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0.035 | 0.035 | 0.035 | 0.035 | 0.035 | 0.003 | 0.001 | 0.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castillo, O.C.; Andrade, V.R.; Rivas, J.J.R.; González, R.O. Comparison of Power Coefficients in Wind Turbines Considering the Tip Speed Ratio and Blade Pitch Angle. Energies 2023, 16, 2774. https://doi.org/10.3390/en16062774
Castillo OC, Andrade VR, Rivas JJR, González RO. Comparison of Power Coefficients in Wind Turbines Considering the Tip Speed Ratio and Blade Pitch Angle. Energies. 2023; 16(6):2774. https://doi.org/10.3390/en16062774
Chicago/Turabian StyleCastillo, Oscar Carranza, Viviana Reyes Andrade, Jaime José Rodríguez Rivas, and Rubén Ortega González. 2023. "Comparison of Power Coefficients in Wind Turbines Considering the Tip Speed Ratio and Blade Pitch Angle" Energies 16, no. 6: 2774. https://doi.org/10.3390/en16062774
APA StyleCastillo, O. C., Andrade, V. R., Rivas, J. J. R., & González, R. O. (2023). Comparison of Power Coefficients in Wind Turbines Considering the Tip Speed Ratio and Blade Pitch Angle. Energies, 16(6), 2774. https://doi.org/10.3390/en16062774