
A New Bearing Fault Detection Strategy Based on Combined Modes Ensemble Empirical Mode Decomposition, KMAD, and an Enhanced Deconvolution Process
 ,
,  , and
, and
Abstract
1. Introduction
2. Theoretical Analysis
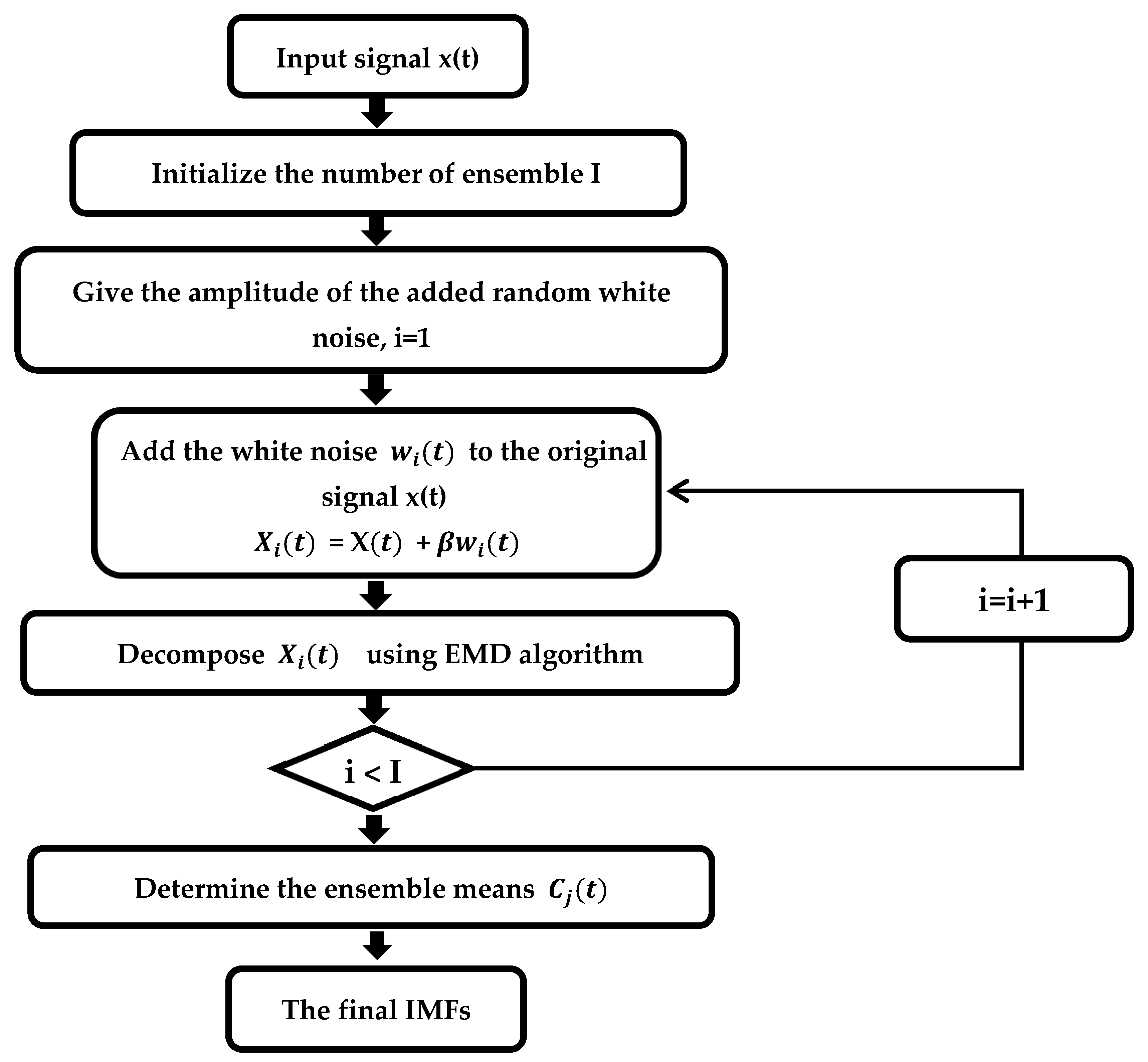
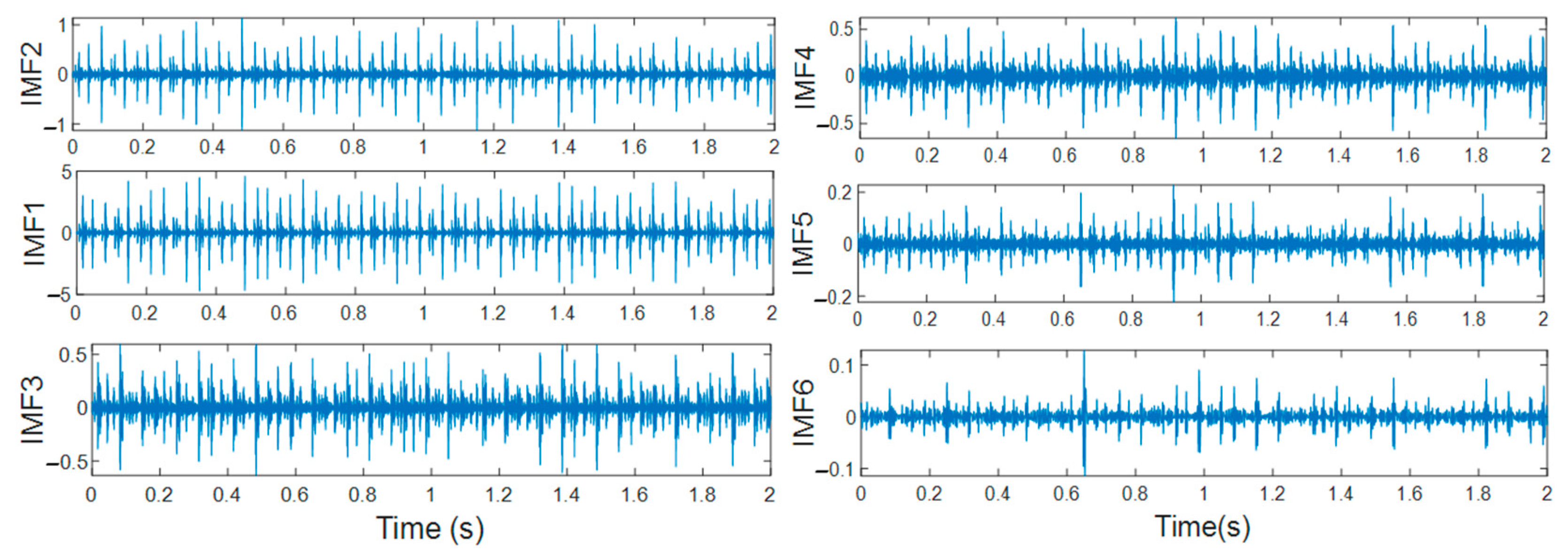
2.1. EEMD Method
- (1)
- Add a random white Gaussian noise β to the existing signal:where β (t) is the i-th added white noise series, and represents the noise-added signal (i = 1, 2,…, i).
- (2)
- Divide by EMD the novel signal and obtain N sets of IMFs:where (t) is the IMFs and . is the residue.
- (3)
- Using the formula below, determine the ensemble means of the I trials:where (, ,..., ) is the IMFs divided by EEMD.
2.2. Minimum Entropy Deconvolution Technique
- Assume that h(0) is a set of initial filter coefficients;
- Calculate u(0) and V(u);
- Calculate
- Determine b(1) and h(1);
- Repeat the procedure until an optimal filter is obtained.
2.3. The Three-Sigma Rule for Noise Minimization
- y (t) is normalized by using zero-mean normalization:where Z(t) is the normalized signal.
- Determine of Z(t);
- Replace the sampling data of Z(t) falling between ±3 with zero while leaving outside of ±3 unchanged.where w(t) represents y(t) after removing the unnecessary components.
3. Proposed Methods
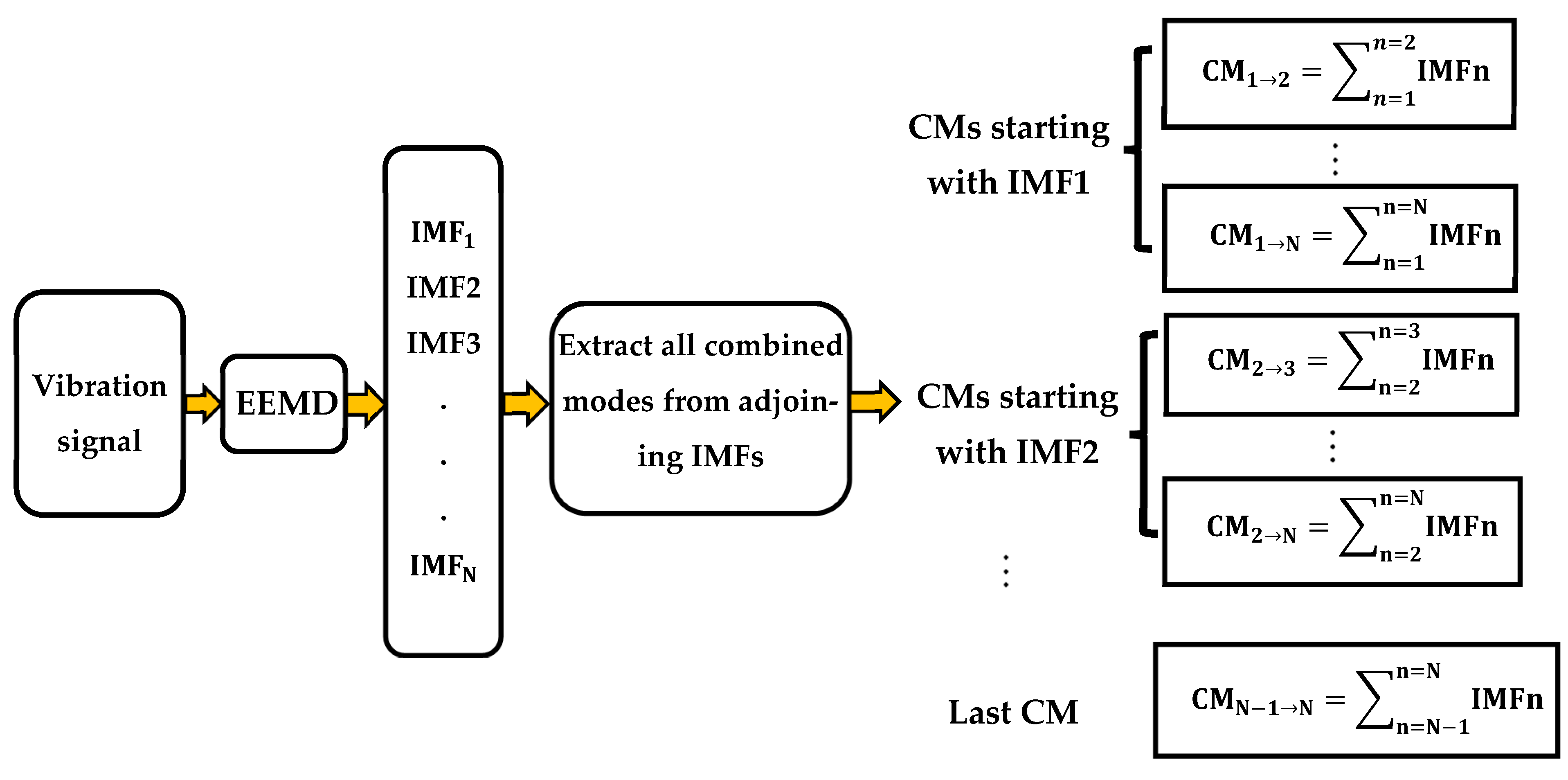
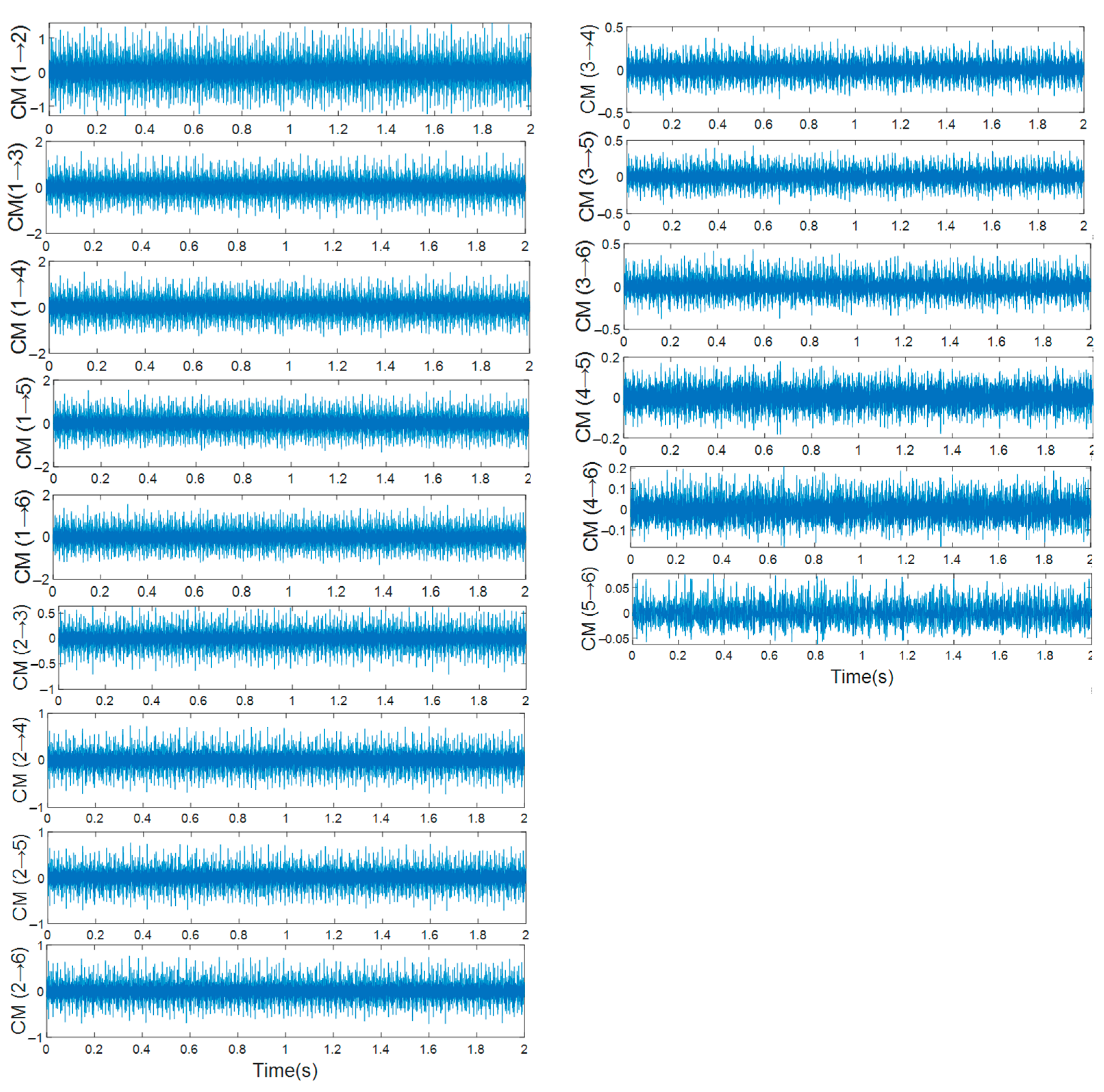
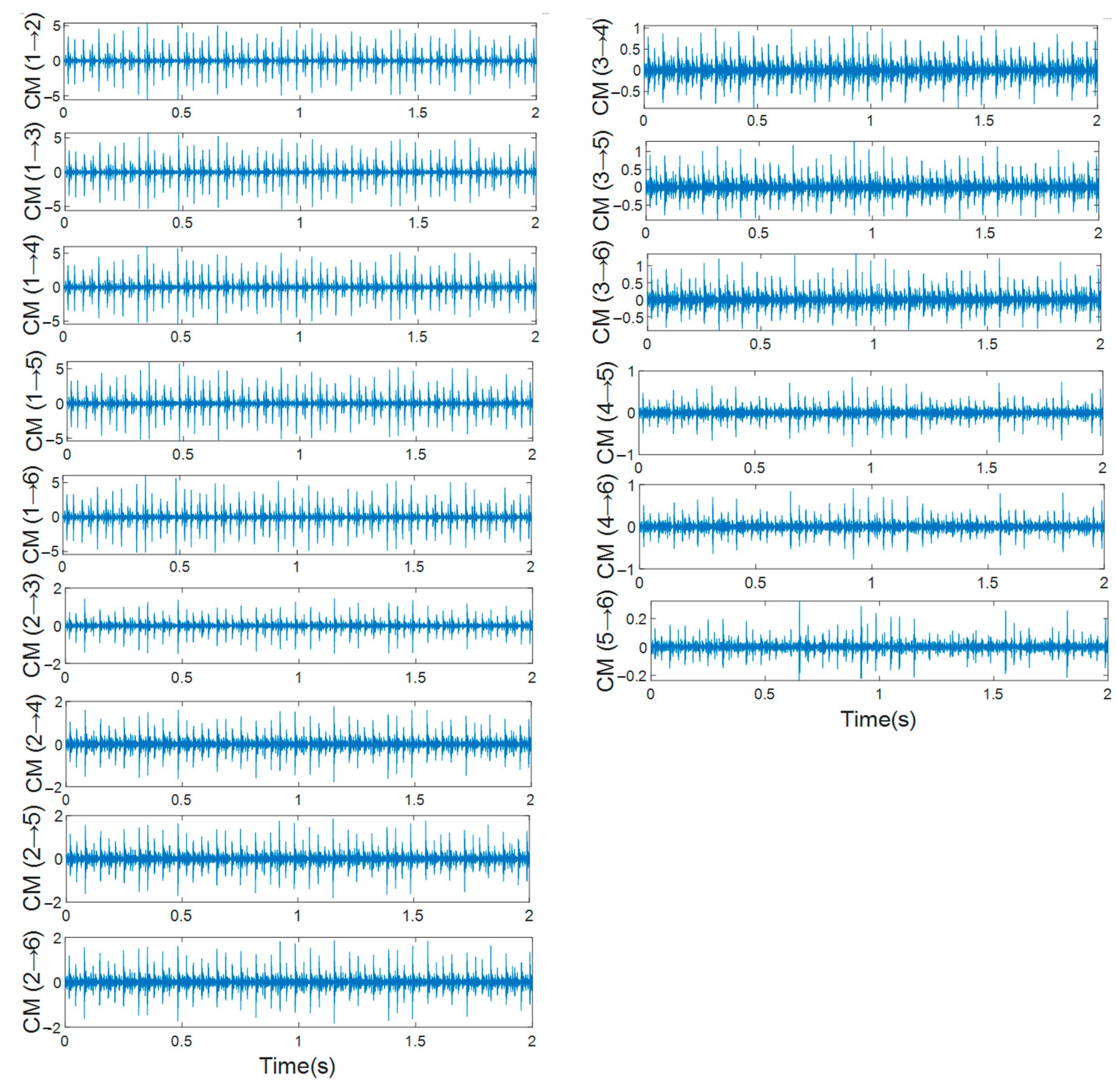
3.1. Combined Modes Ensemble Empirical Mode Decomposition (CMEEMD)
- Divide these CMs into groups. The first group consists of CMs starting with . By using Equation (17), we obtain:where is the combination of adjoining IMFs from to the j-th IMF for j = 2, … N, is the number of IMFs.
- Using Equation (18), extract all CMs starting with :
- The second group is constituted by CMs starting with the second mode. In this case, Equation (17) can be expressed as:where is the combination of adjoining IMFs from to the j-th IMF for j = 3, … N.
- Using Equation (20), extract all CMs starting with :
- The process continues until we reach the N − 1 group. In this case, the last combination can be represented by the following equation:
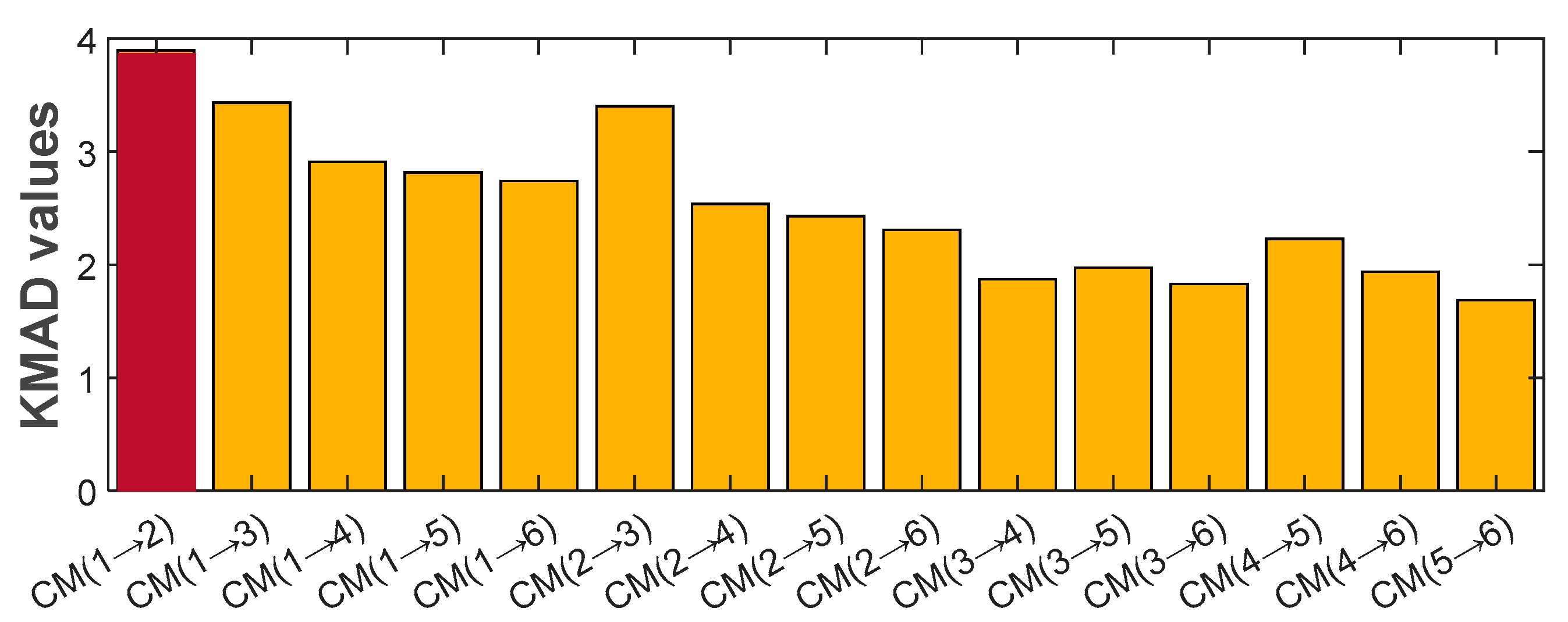
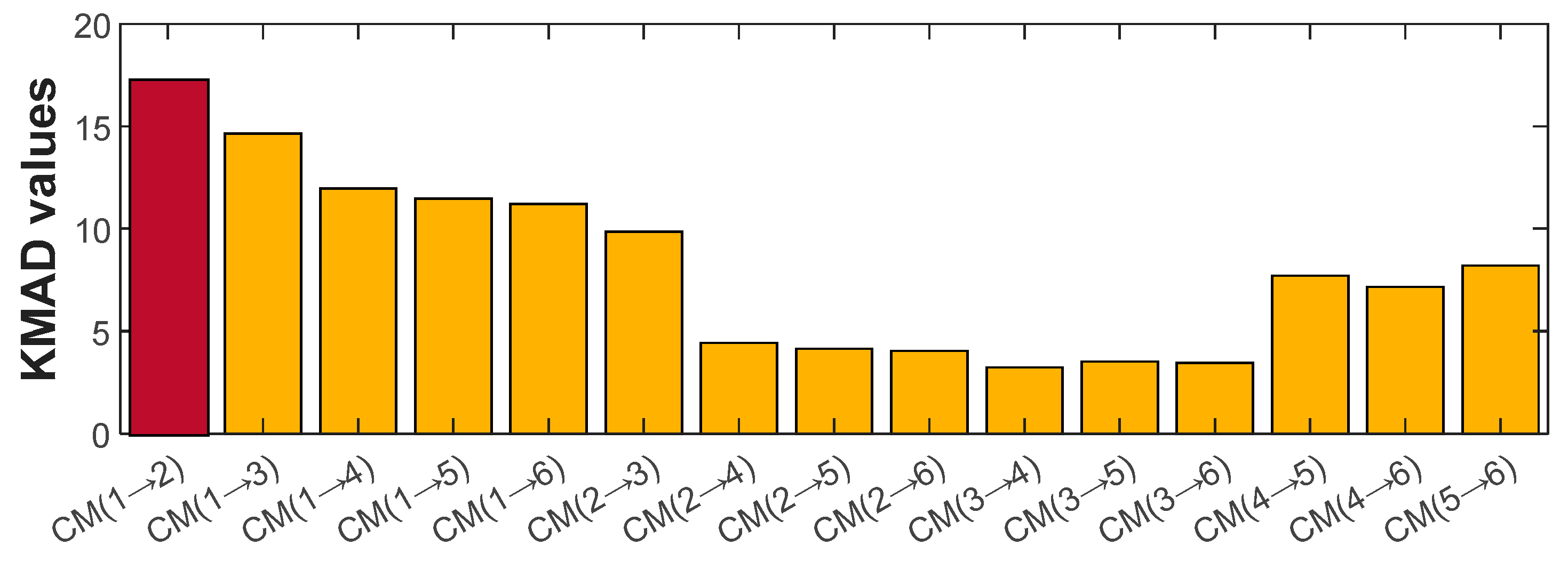
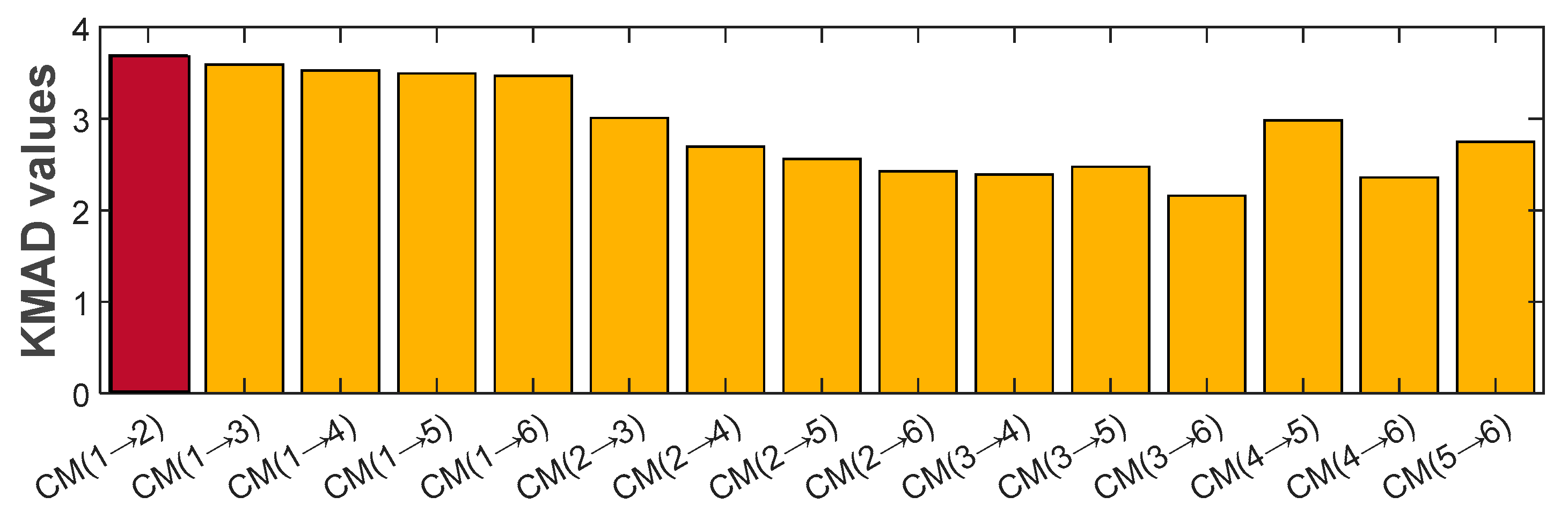
3.2. Sensitive CM Selection Using KMAD Indicator
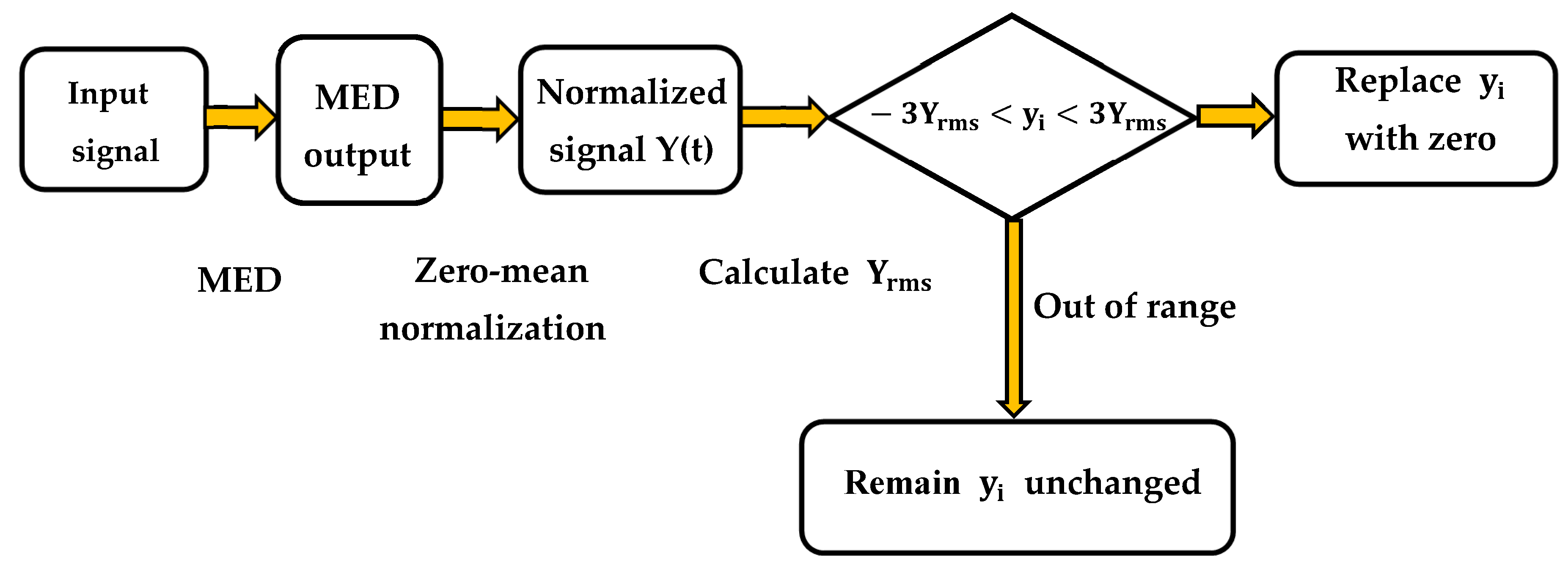
3.3. The Enhanced Deconvolution Process
- Apply the MED technique to the input signal;
- Perform the de-noising method derived from the three-sigma rule on the MED output. It consists of the following steps:
- Normalize the MED output using zero-mean normalization;
- Calculate the root mean square value of the normalized signal Y(t);
- Replace the sampling data of Y(t) falling between ±3Yrms with zero while keeping outside of ±3Yrms unmodified.
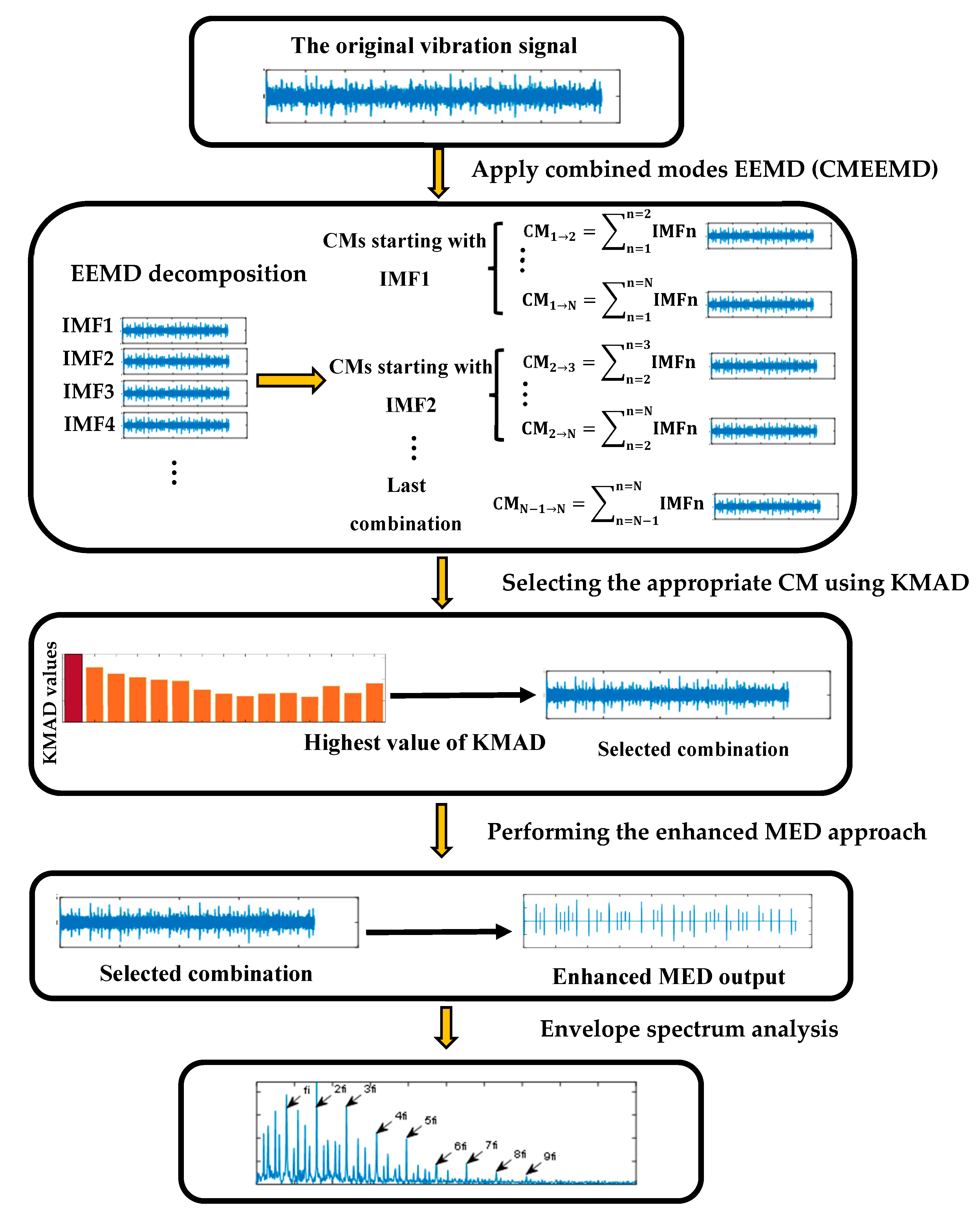
3.4. The Proposed Strategy for Bearing Fault Detection
- 1.
- Perform CMEEMD on the fault vibration signal as follows:
- Decompose the fault vibration signal with the defect into IMFs by EEMD;
- Extract all combined modes (CMs) from adjoining IMFs (see Section 3.1).
- 2.
- Select the appropriate combination using the KMAD indicator (see Section 3.2):
- Calculate the KMAD value of each CM;
- Select the required combination based on the highest value of KMAD.
- 3.
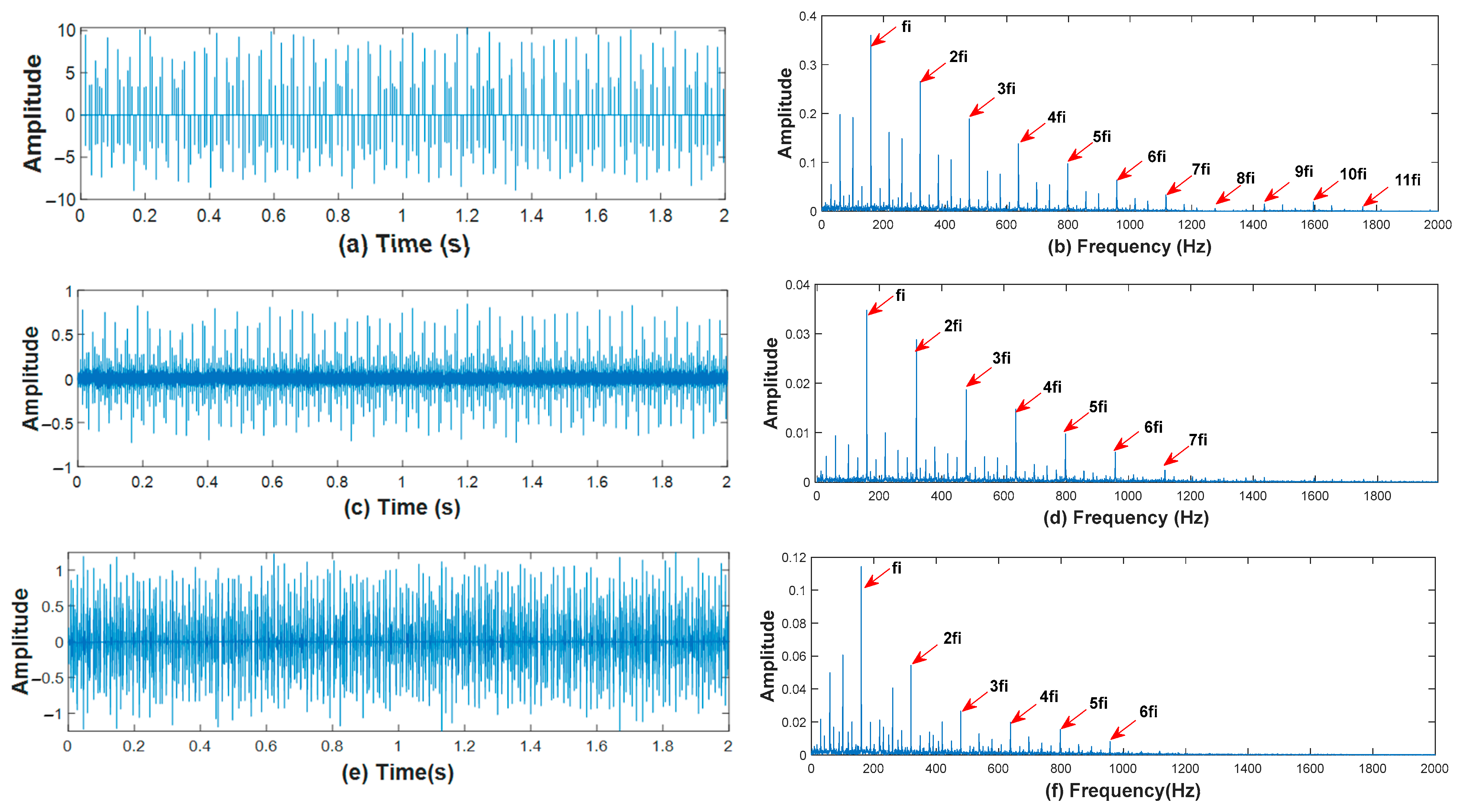
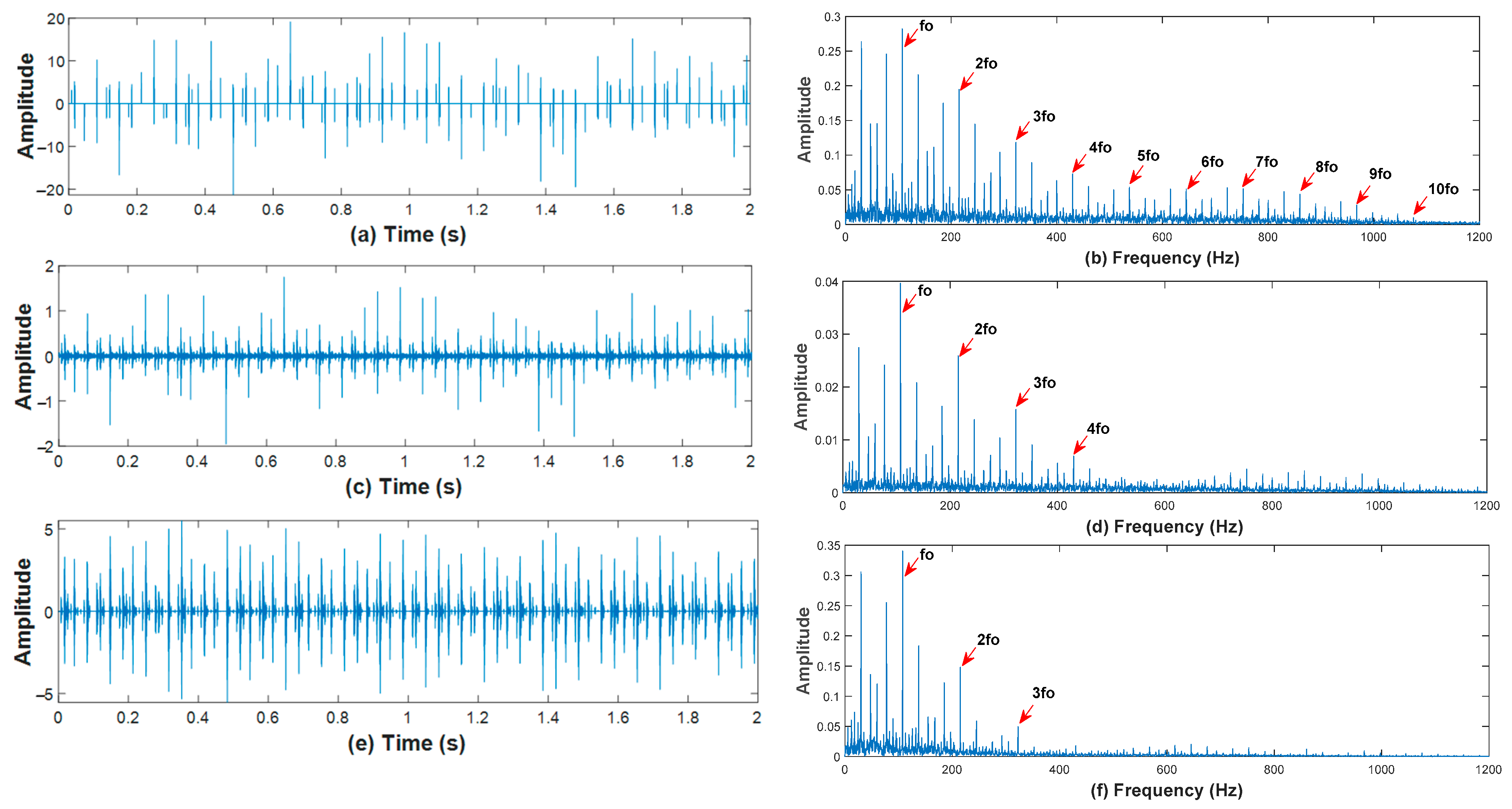
- Perform the enhanced deconvolution process on the selected CM (see Section 3.3).
4. The Simulation Validation
4.1. Analysis of the Proposed Method
4.1.1. CMEEMD Analysis
4.1.2. Selecting the Appropriate CM
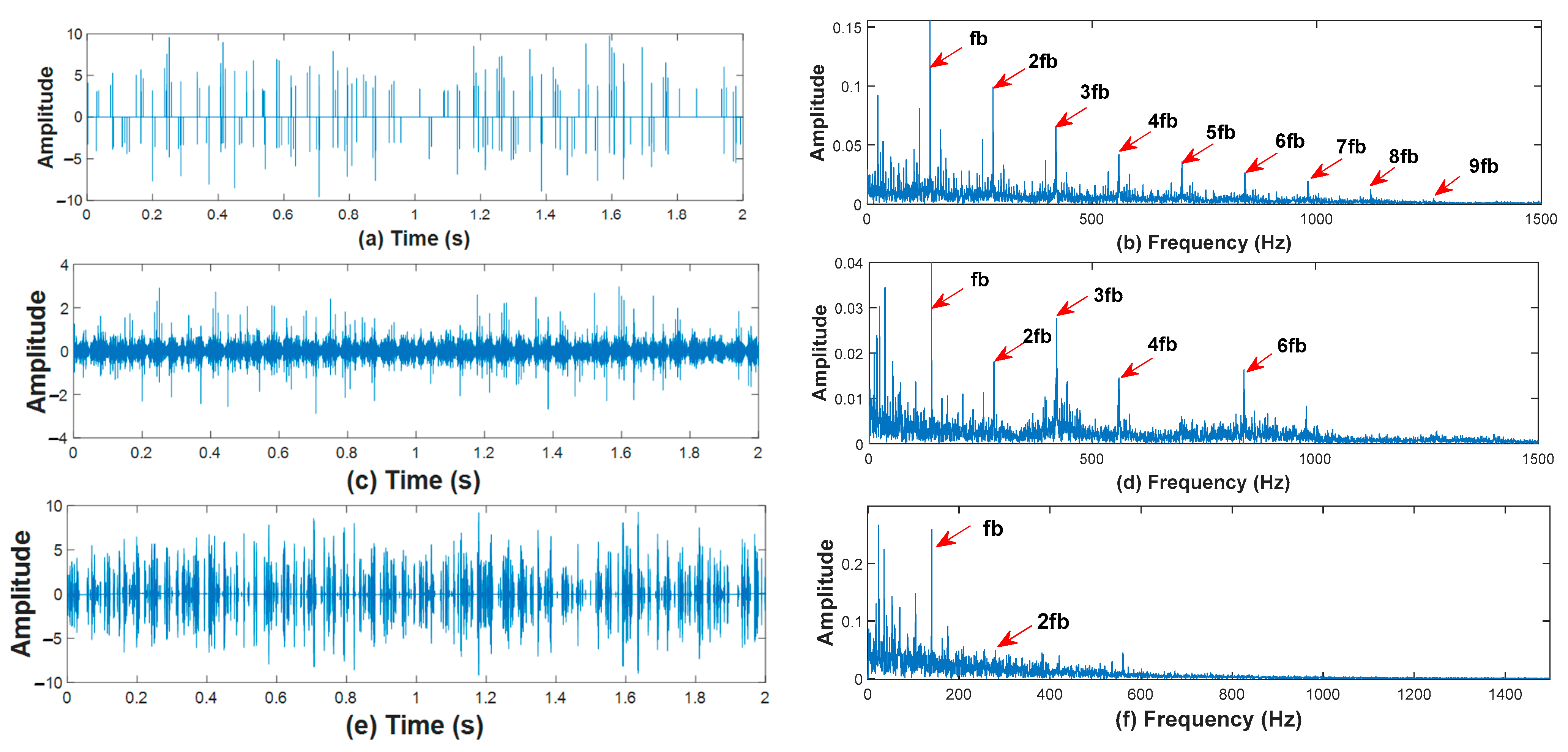
4.1.3. Performing the Proposed Deconvolution Process
4.2. Advantages of the Proposed Methods for the Diagnosis of the Simulated Signal
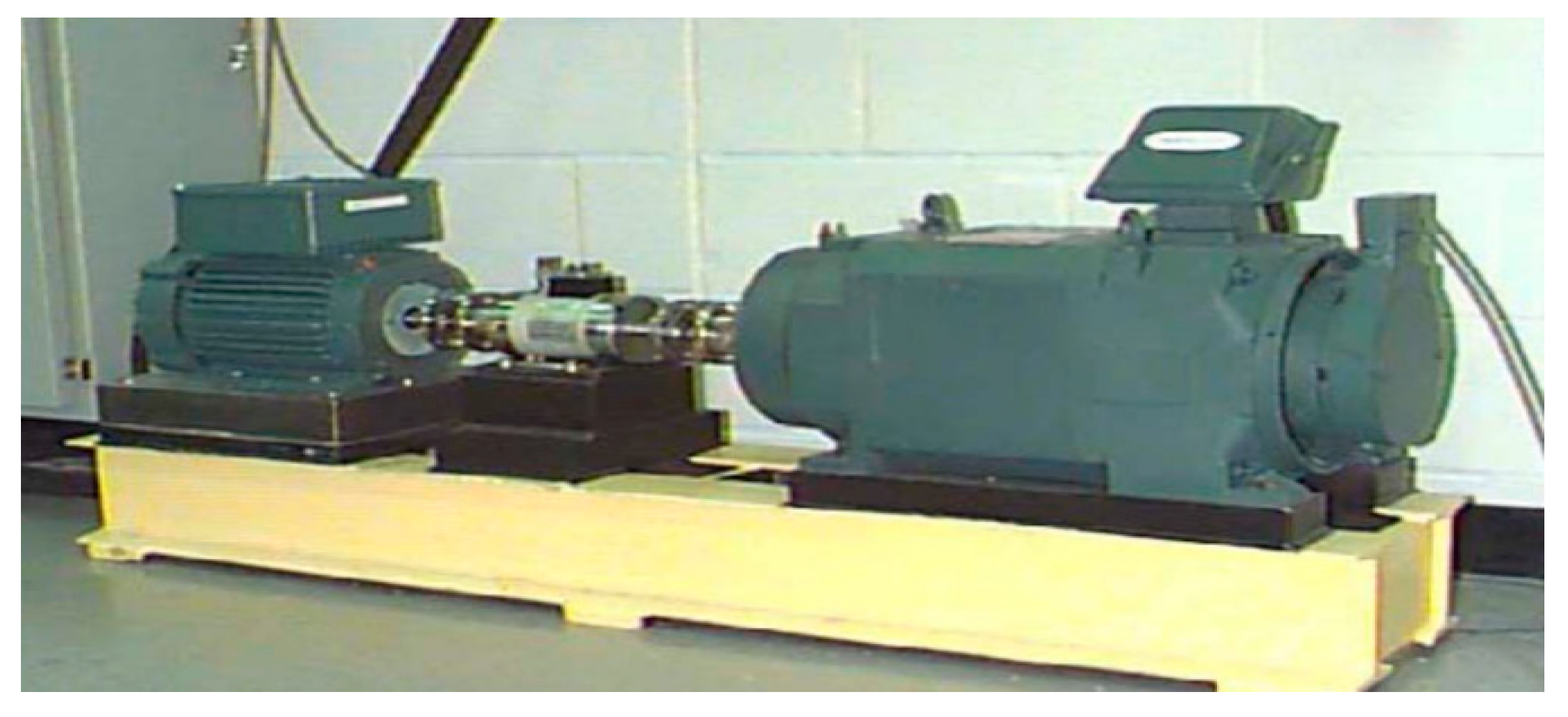
5. Experimental Validation
5.1. Case 1: Diagnosis of the Inner Race Fault
5.1.1. Analysis of the Proposed Method
5.1.2. Advantages of the Proposed Techniques for Inner Race Fault Diagnosis
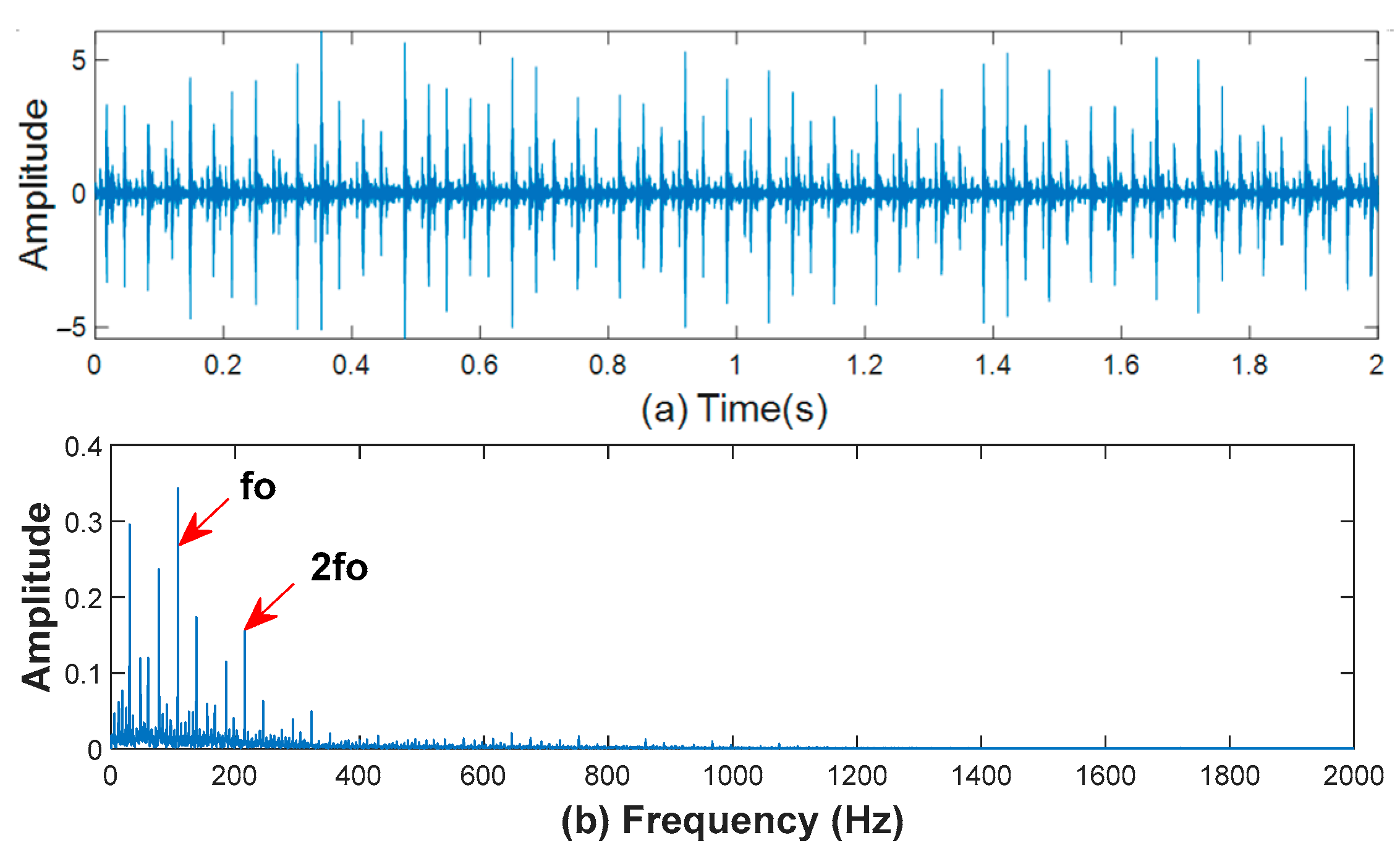
5.2. Case 2: Diagnosis of the Outer Race Fault
5.2.1. Analysis of the Proposed Method
5.2.2. Advantages of the Proposed Techniques for Outer Race Fault Diagnosis
5.3. Case 3: Diagnosis of the Ball Bearing Fault
5.3.1. Analysis of the Proposed Method
5.3.2. Advantages of the Proposed Techniques for Ball Bearing Fault Diagnosis
6. Conclusions
- Compared to the MED technique, the enhanced MED presented in this paper is more robust in revealing defect pulses (taking Figure 9 as an example).
- Comparison with the wavelet de-noising method demonstrated that the enhanced MED performs well with noise suppression and is more effective in revealing fault information (taking Figure 28 as an example).
- Compared results between the sensitive IMF using maximum kurtosis and the sensitive CM using the proposed KMAD indicate that the CM selected contains rich fault feature information (taking Figure 17 as an example).
- CMEEMD and KMAD proposed herein solves the drawback of the IMF selection method by using the maximum kurtosis value to ensure that no information about the defect is wasted (taking Figure 23 as an example).
- In contrast to the conventional IMF selection method that failed to identify the appropriate IMF for the ball defect, the KMAD indicator was successful in selecting the appropriate combination of useful IMFs (see Figure 29).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Deekshit Kompella, K.C.; Venu Gopala Rao, M.; Srinivasa Rao, R. Bearing fault detection in a 3 phase induction motor using stator current frequency spectral subtraction with various wavelet decomposition techniques. Ain Shams Eng. J. 2018, 9, 2427–2439. [Google Scholar] [CrossRef]
- Kumar, P.S.; Kumaraswamidhas, L.A.; Laha, S.K. Selecting effective intrinsic mode functions of empirical mode decomposition and variational mode decomposition using dynamic time warping algorithm for Rolling Element Bearing Fault diagnosis. Trans. Inst. Meas. Control 2018, 41, 1923–1932. [Google Scholar] [CrossRef]
- Chen, L.; Xu, G.; Zhang, S.; Yan, W.; Wu, Q. Health indicator construction of machinery based on end-to-end trainable convolution recurrent neural networks. J. Manuf. Syst. 2020, 54, 1–11. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Zheng, J.; Huang, S.; Pan, H.; Jiang, K. An improved empirical wavelet transform and refined composite multiscale dispersion entropy-based fault diagnosis method for rolling bearing. IEEE Access 2020, 8, 168732–168742. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Wang, H.; Chen, J.; Dong, G. Feature extraction of rolling bearing’s early weak fault based on EEMD and tunable Q-factor wavelet transform. Mech. Syst. Signal Process. 2014, 48, 103–119. [Google Scholar] [CrossRef]
- Yang, F.; Kou, Z.; Wu, J.; Li, T. Application of mutual information-sample entropy based Med-ICEEMDAN de-noising scheme for weak fault diagnosis of hoist bearing. Entropy 2018, 20, 667. [Google Scholar] [CrossRef]
- Li, J.; Tong, Y.; Guan, L.; Wu, S.; Li, D. A UV-visible absorption spectrum denoising method based on EEMD and an improved universal threshold filter. RSC Adv. 2018, 8, 8558–8568. [Google Scholar] [CrossRef]
- Ricci, R.; Pennacchi, P. Diagnostics of gear faults based on EMD and automatic selection of intrinsic mode functions. Mech. Syst. Signal Process. 2011, 25, 821–838. [Google Scholar] [CrossRef]
- Li, Z.; Shi, B. Research of fault diagnosis based on sensitive intrinsic mode function selection of EEMD and Adaptive Stochastic Resonance. Shock Vib. 2016, 2016, 2841249. [Google Scholar] [CrossRef]
- Ma, J.; Wu, J.; Wang, X. Incipient fault feature extraction of rolling bearings based on the MVMD and teager energy operator. ISA Trans. 2018, 80, 297–311. [Google Scholar] [CrossRef]
- Luo, C.; Jia, M.P.; Wen, Y. The Diagnosis Approach for Rolling Bearing Fault Based on Kurtosis Criterion EMD and Hilbert Envelope Spectrum. In Proceedings of the 2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 3–5 October 2017. [Google Scholar]
- Damine, Y.; Megherbi, A.C.; Sbaa, S.; Bessous, N. Study of the IMF Selection Methods Using Kurtosis Parameter for Bearing Fault Diagnosis. In Proceedings of the 2022 IEEE 19th International Multi-Conference on Systems, Signals & Devices (SSD), Setif, Algeria, 6–10 May 2022. [Google Scholar]
- Pennacchi, P.; Ricci, R.; Chatterton, S.; Borghesani, P. Effectiveness of med for fault diagnosis in roller bearings. Springer Proc. Phys. 2011, 139, 637–642. [Google Scholar] [CrossRef]
- Chatterton, S.; Ricci, R.; Pennacchi, P.; Borghesani, P. Signal Processing Diagnostic Tool for rolling element bearings using EMD and Med. Lect. Notes Mech. Eng. 2013, 379–388. [Google Scholar] [CrossRef]
- Ding, J.; Huang, L.; Xiao, D.; Jiang, L. A fault feature extraction method for rolling bearing based on intrinsic time-scale decomposition and AR minimum entropy deconvolution. Shock Vib. 2021, 2021, 1–19. [Google Scholar] [CrossRef]
- Zhao, H.; Min, F.; Zhu, W. Test-cost-sensitive attribute reduction of data with normal distribution measurement errors. Math. Probl. Eng. 2013, 2013, 6673965. [Google Scholar] [CrossRef]
- Fang, K.; Zhang, H.; Qi, H.; Dai, Y. Comparison of EMD and EEMD in Rolling Bearing Fault Signal Analysis. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018. [Google Scholar]
- Wiggins, R.A. Minimum entropy deconvolution. Geoexploration 1978, 16, 21–35. [Google Scholar] [CrossRef]
- González, G.; Badra, R.E.; Medina, R.; Regidor, J. Period estimation using minimum entropy deconvolution (MED). Signal Process. 1995, 41, 91–100. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B.; Endo, H. The enhancement of fault detection and diagnosis in rolling element bearings using minimum entropy deconvolution combined with spectral kurtosis. Mech. Syst. Signal Process. 2007, 21, 2616–2633. [Google Scholar] [CrossRef]
- Shojae Chaeikar, S.; Manaf, A.A.; Alarood, A.A.; Zamani, M. PFW: Polygonal fuzzy weighted—An SVM kernel for the classification of overlapping data groups. Electronics 2020, 9, 615. [Google Scholar] [CrossRef]
- Qin, B.; Luo, Q.; Zhang, J.; Li, Z.; Qin, Y. Fault frequency identification of rolling bearing using reinforced ensemble local mean decomposition. J. Control Sci. Eng. 2021, 2021, 2744193. [Google Scholar] [CrossRef]
- Wang, H.-D.; Deng, S.-E.; Yang, J.-X.; Liao, H. A fault diagnosis method for rolling element bearing (REB) based on reducing Reb Foundation vibration and noise-assisted vibration signal analysis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 233, 2574–2587. [Google Scholar] [CrossRef]
- Zhen, D.; Guo, J.; Xu, Y.; Zhang, H.; Gu, F. A novel fault detection method for rolling bearings based on non-stationary vibration signature analysis. Sensors 2019, 19, 3994. [Google Scholar] [CrossRef] [PubMed]
- Dibaj, A.; Hassannejad, R.; Ettefagh, M.M.; Ehghaghi, M.B. Incipient fault diagnosis of bearings based on parameter-optimized VMD and Envelope Spectrum Weighted Kurtosis index with a new sensitivity assessment threshold. ISA Trans. 2021, 114, 413–433. [Google Scholar] [CrossRef]
- Chen, J.; Yu, D.; Yang, Y. The application of energy operator demodulation approach based on EMD in machinery fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 668–677. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, D.; Cheng, J. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurement 2007, 40, 943–950. [Google Scholar] [CrossRef]
- Cheng, Y.; Wang, Z.; Chen, B.; Zhang, W.; Huang, G. An improved complementary ensemble empirical mode decomposition with adaptive noise and its application to rolling element bearing fault diagnosis. ISA Trans. 2019, 91, 218–234. [Google Scholar] [CrossRef]
- Sun, Y.; Yu, J. Fault detection of rolling bearing using sparse representation-based adjacent signal difference. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- Liu, T.; Chen, J.; Dong, G.; Xiao, W.; Zhou, X. The fault detection and diagnosis in rolling element bearings using frequency band entropy. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2012, 227, 87–99. [Google Scholar] [CrossRef]
- Download a Data File: Case School of Engineering: Case Western Reserve University. Available online: https://engineering.case.edu/bearingdatacenter/download-data-file (accessed on 24 October 2020).
- Saruhan, H.; Sandemir, S.; Çiçek, A.; Uygur, I. Vibration analysis of rolling element bearings defects. J. Appl. Res. Technol. 2014, 12, 384–395. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IMF | Kurtosis |
|---|---|
| IMF1 | 4.6127 |
| IMF2 | 3.2595 |
| IMF3 | 3.0748 |
| IMF4 | 3.0268 |
| IMF5 | 2.9883 |
| IMF6 | 2.8621 |
| IMF | Kurtosis |
|---|---|
| IMF1 | 4.6903 |
| IMF2 | 4.7682 |
| IMF3 | 4.3248 |
| IMF4 | 3.0268 |
| IMF5 | 2.5395 |
| IMF6 | 2.6651 |
| IMF | Kurtosis |
|---|---|
| IMF1 | 17.7045 |
| IMF2 | 25.1902 |
| IMF3 | 10.6024 |
| IMF4 | 8.8478 |
| IMF5 | 10.0602 |
| IMF6 | 11.0606 |
| IMF | Kurtosis |
|---|---|
| IMF1 | 3.9782 |
| IMF2 | 3.6592 |
| IMF3 | 4.4182 |
| IMF4 | 4.4670 |
| IMF5 | 5.0951 |
| IMF6 | 3.5202 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Damine, Y.; Bessous, N.; Pusca, R.; Megherbi, A.C.; Romary, R.; Sbaa, S. A New Bearing Fault Detection Strategy Based on Combined Modes Ensemble Empirical Mode Decomposition, KMAD, and an Enhanced Deconvolution Process. Energies 2023, 16, 2604. https://doi.org/10.3390/en16062604
Damine Y, Bessous N, Pusca R, Megherbi AC, Romary R, Sbaa S. A New Bearing Fault Detection Strategy Based on Combined Modes Ensemble Empirical Mode Decomposition, KMAD, and an Enhanced Deconvolution Process. Energies. 2023; 16(6):2604. https://doi.org/10.3390/en16062604
Chicago/Turabian StyleDamine, Yasser, Noureddine Bessous, Remus Pusca, Ahmed Chaouki Megherbi, Raphaël Romary, and Salim Sbaa. 2023. "A New Bearing Fault Detection Strategy Based on Combined Modes Ensemble Empirical Mode Decomposition, KMAD, and an Enhanced Deconvolution Process" Energies 16, no. 6: 2604. https://doi.org/10.3390/en16062604
APA StyleDamine, Y., Bessous, N., Pusca, R., Megherbi, A. C., Romary, R., & Sbaa, S. (2023). A New Bearing Fault Detection Strategy Based on Combined Modes Ensemble Empirical Mode Decomposition, KMAD, and an Enhanced Deconvolution Process. Energies, 16(6), 2604. https://doi.org/10.3390/en16062604