
Implementation of Deep Learning-Based Bi-Directional DC-DC Converter for V2V and V2G Applications—An Experimental Investigation



Abstract
:1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Key Contributions
- 1.
- Design of a highly efficient, modular bi-directional converter for V2V charging.
- 2.
- Design of DNN-based closed-loop control for bi-directional V2V and V2G charger.
- 3.
- Comparison of proposed controller with PI controller.
1.4. Organization
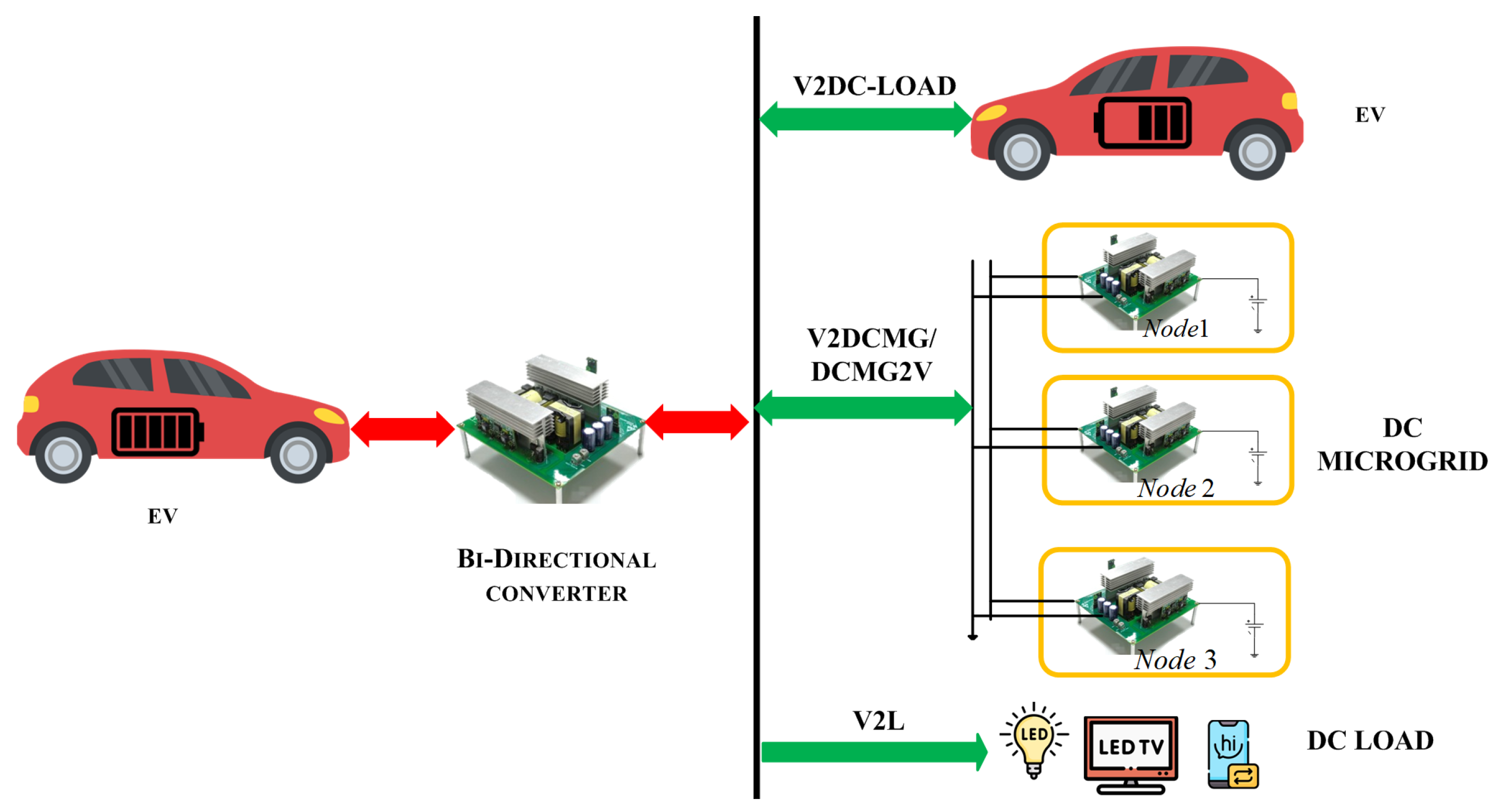
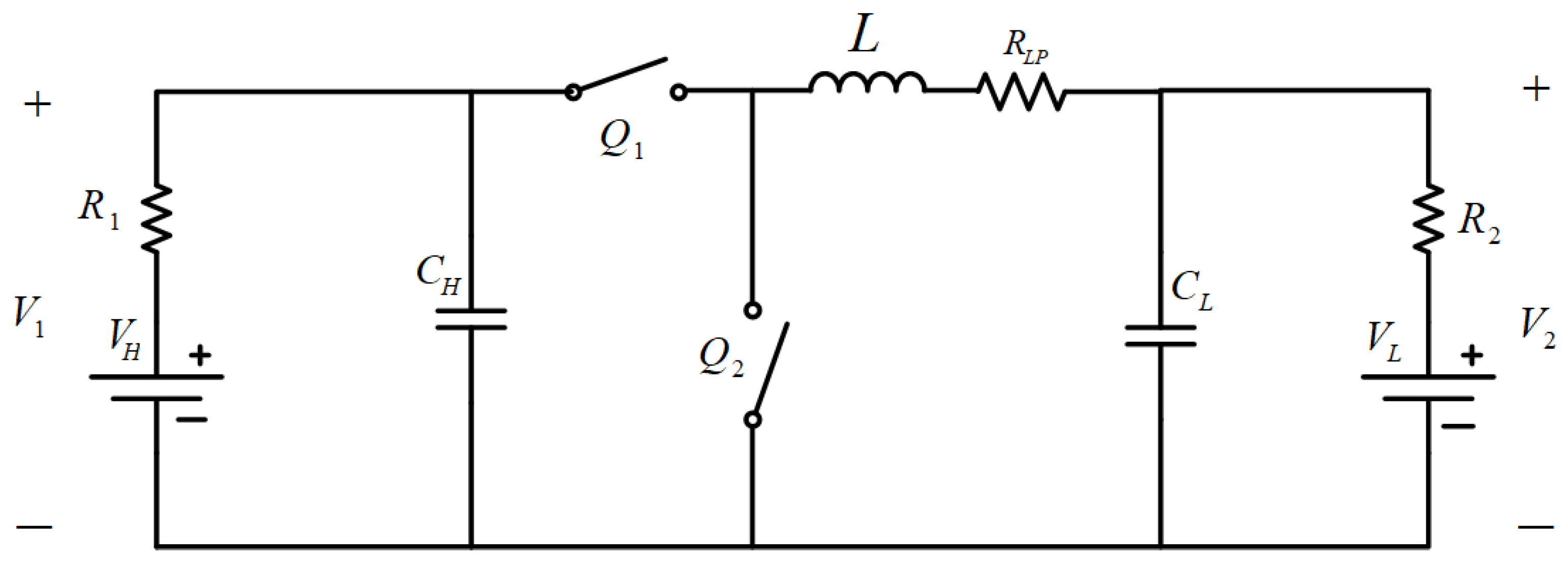
2. Operation of Non Isolated Bi-Directional Converter (NIBC)
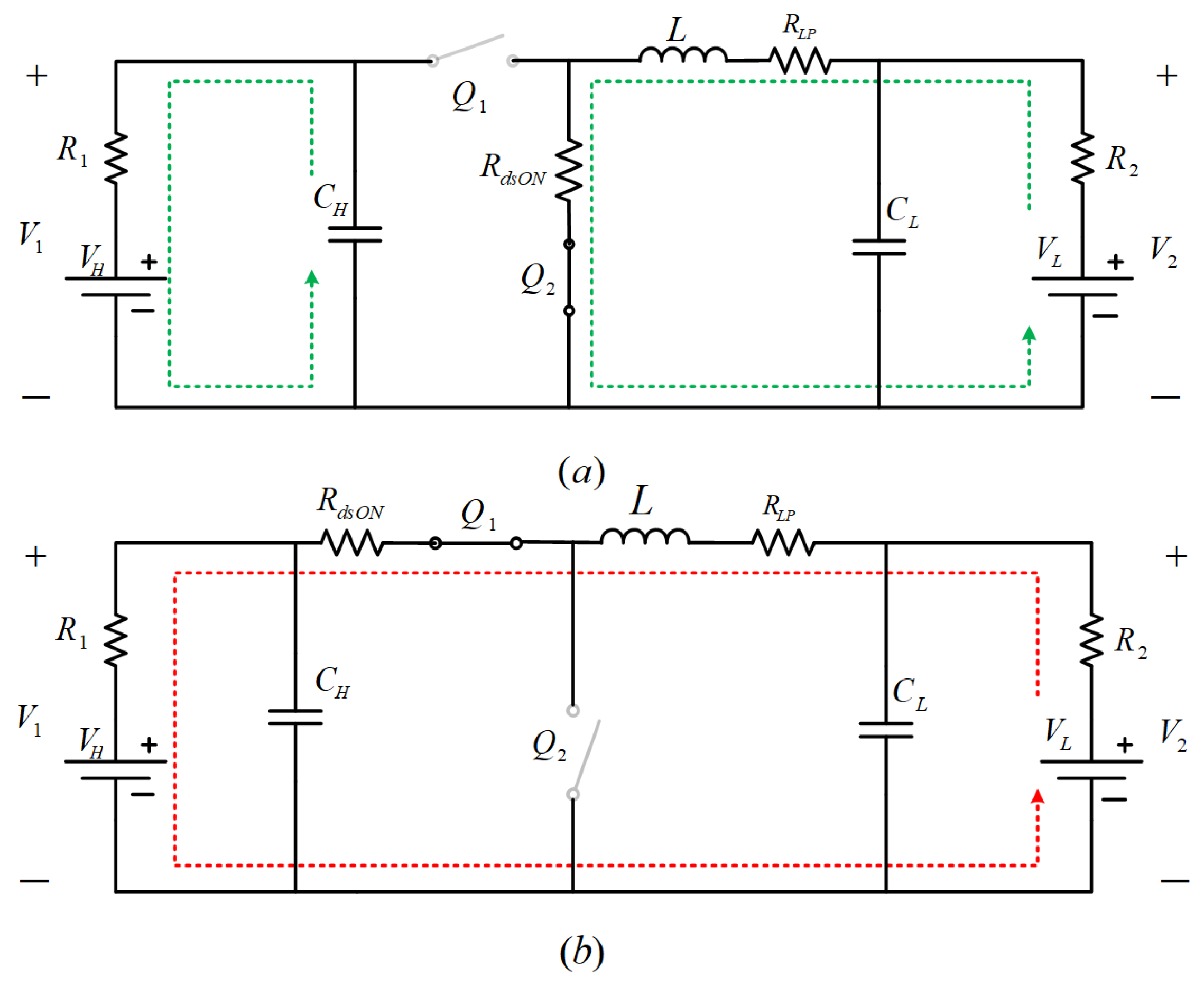
2.1. Mode I
2.2. Mode II
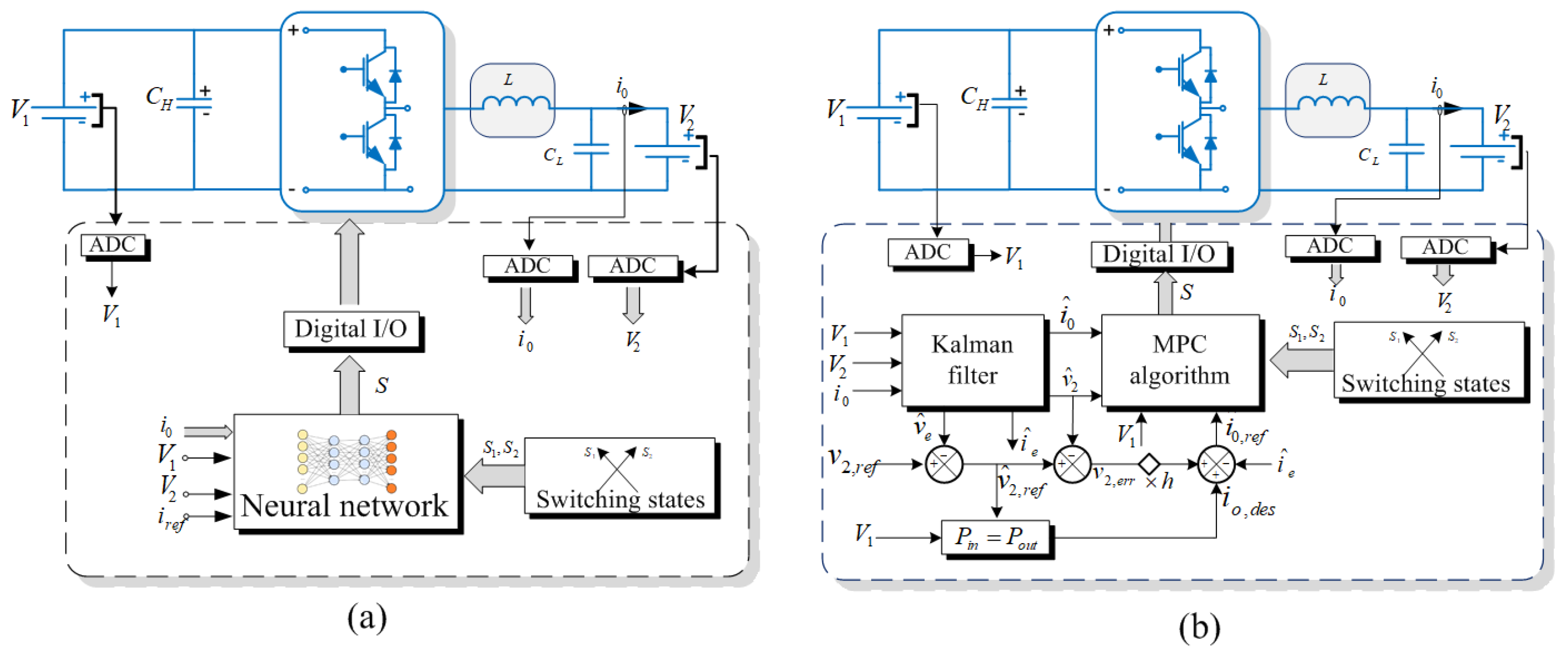
3. Controller Design
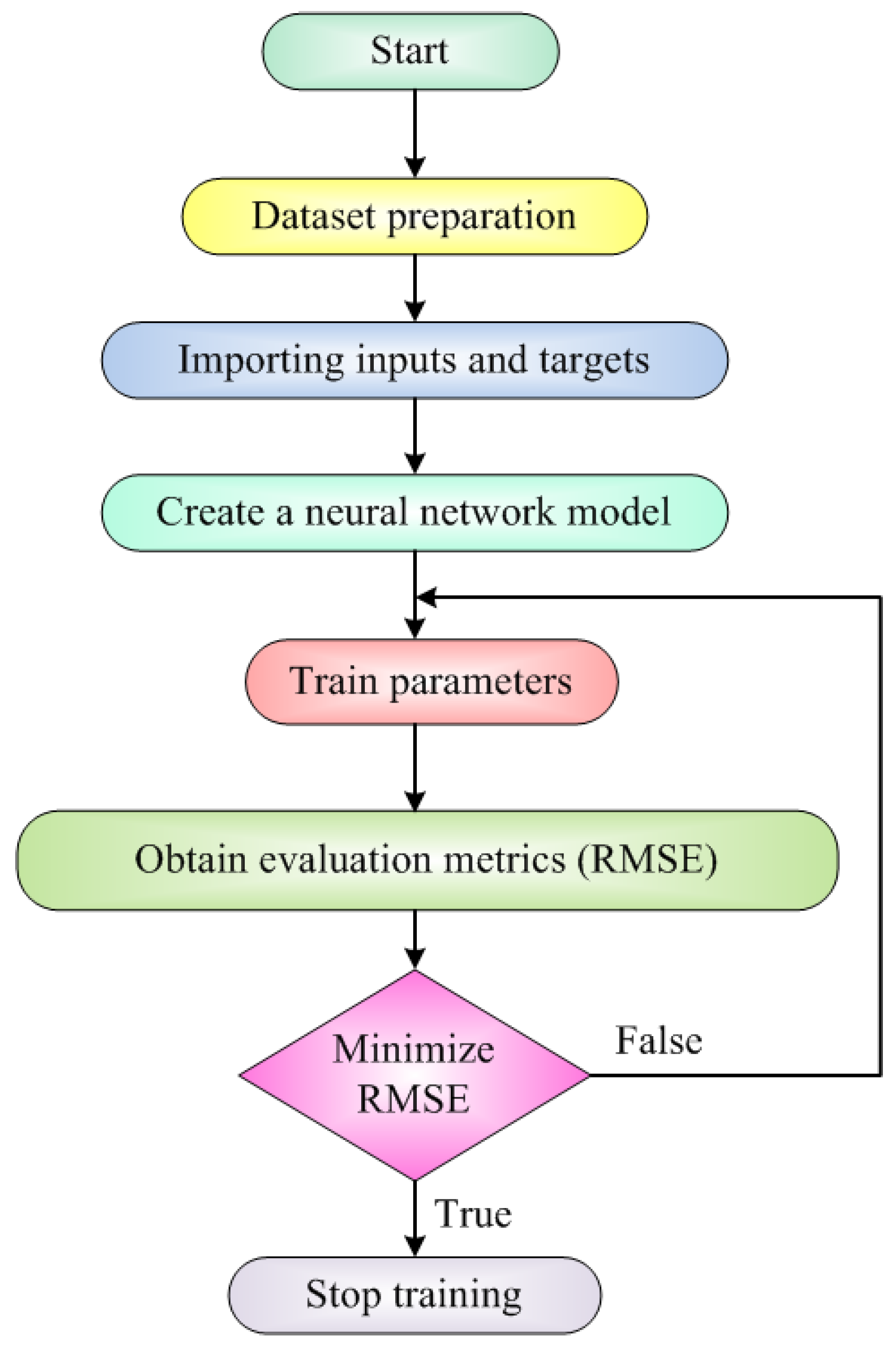
3.1. Training and Testing of Proposed DNN Controller
3.1.1. Building Model Using MATLAB
3.1.2. Hyperparameter Selection
3.2. Algorithm
4. Results
4.1. Simulation of Bi-Directional Converter Using PID Controller
4.1.1. Charging to Discharging Mode
4.1.2. Discharging to Charging Mode
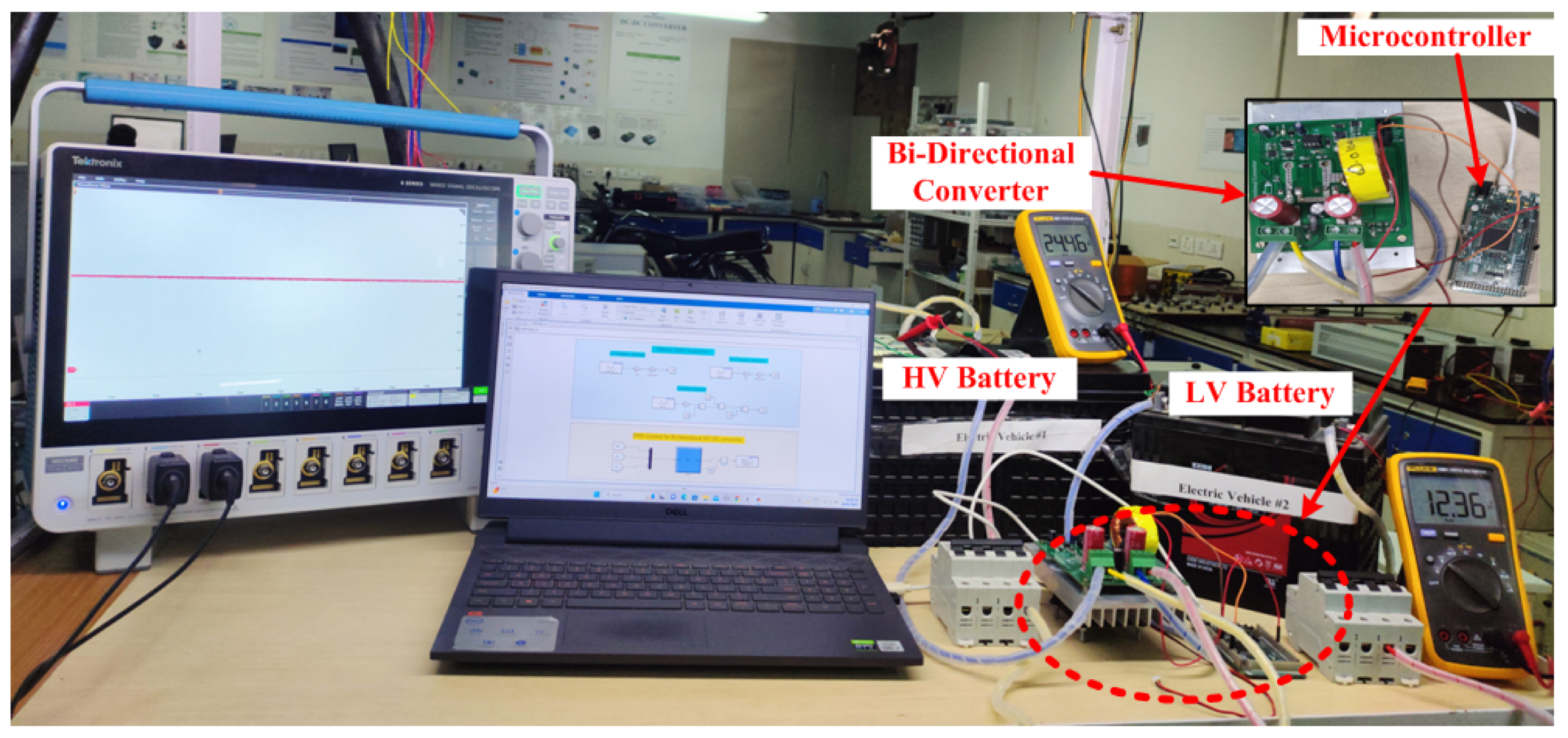
4.2. Hardware Implementation of Bi-Directional Converter Using PID Controller
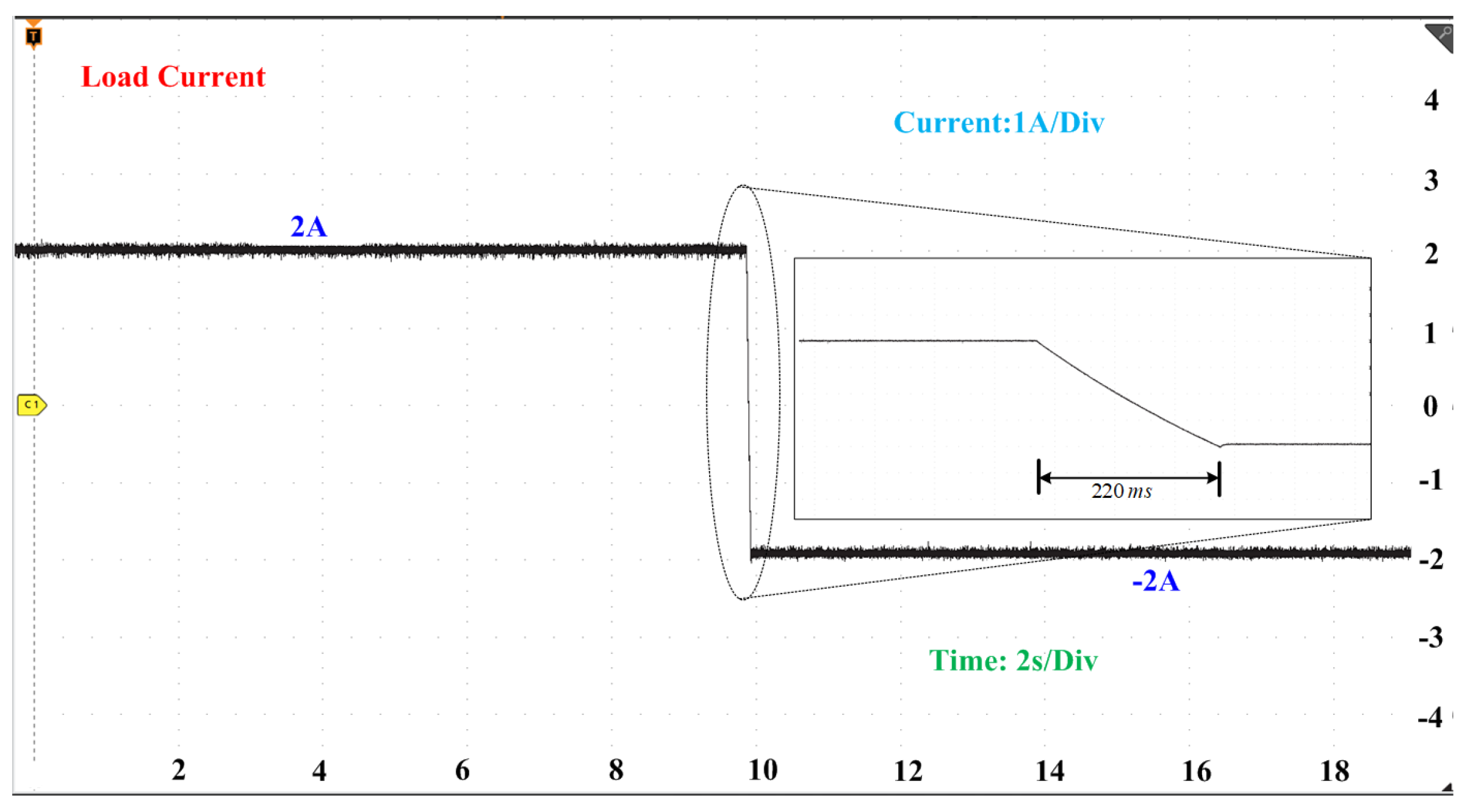
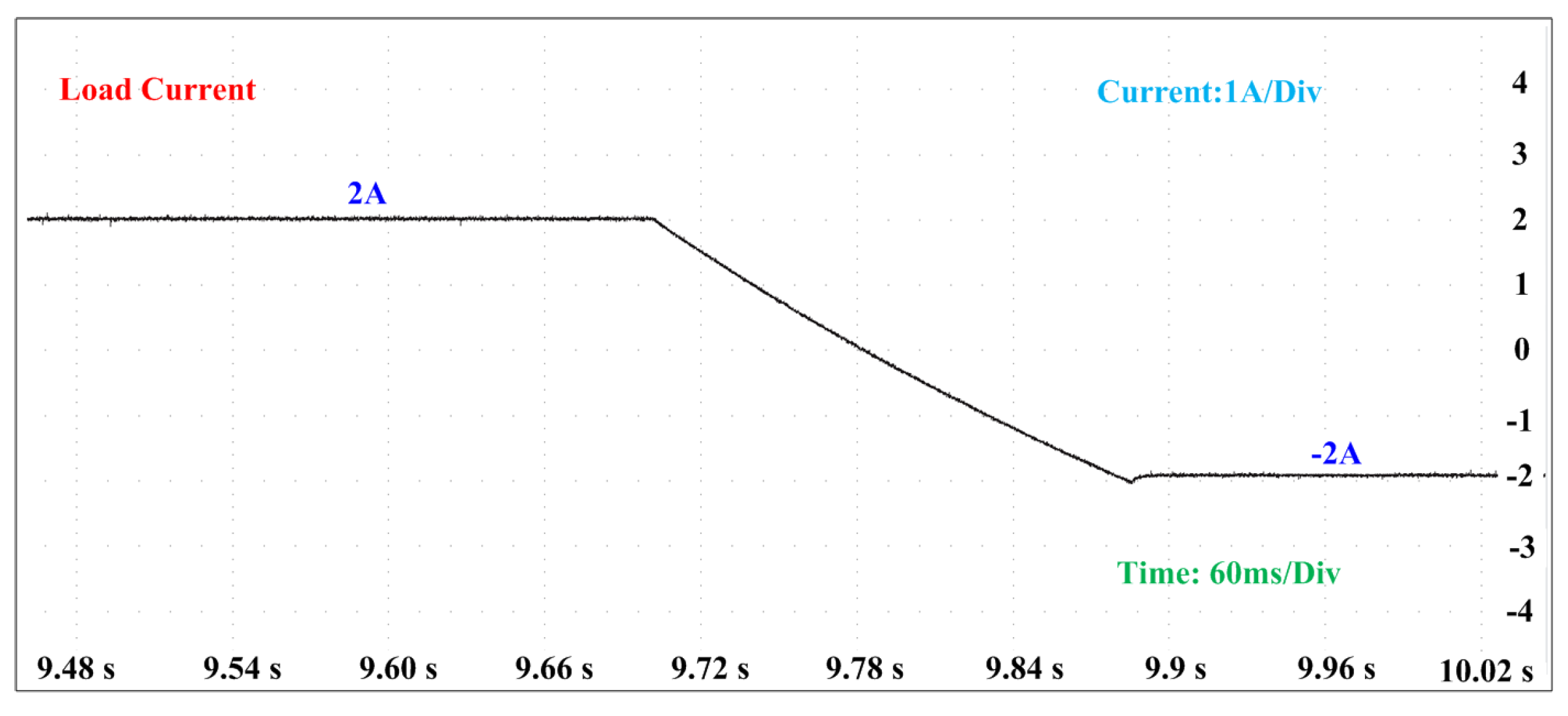
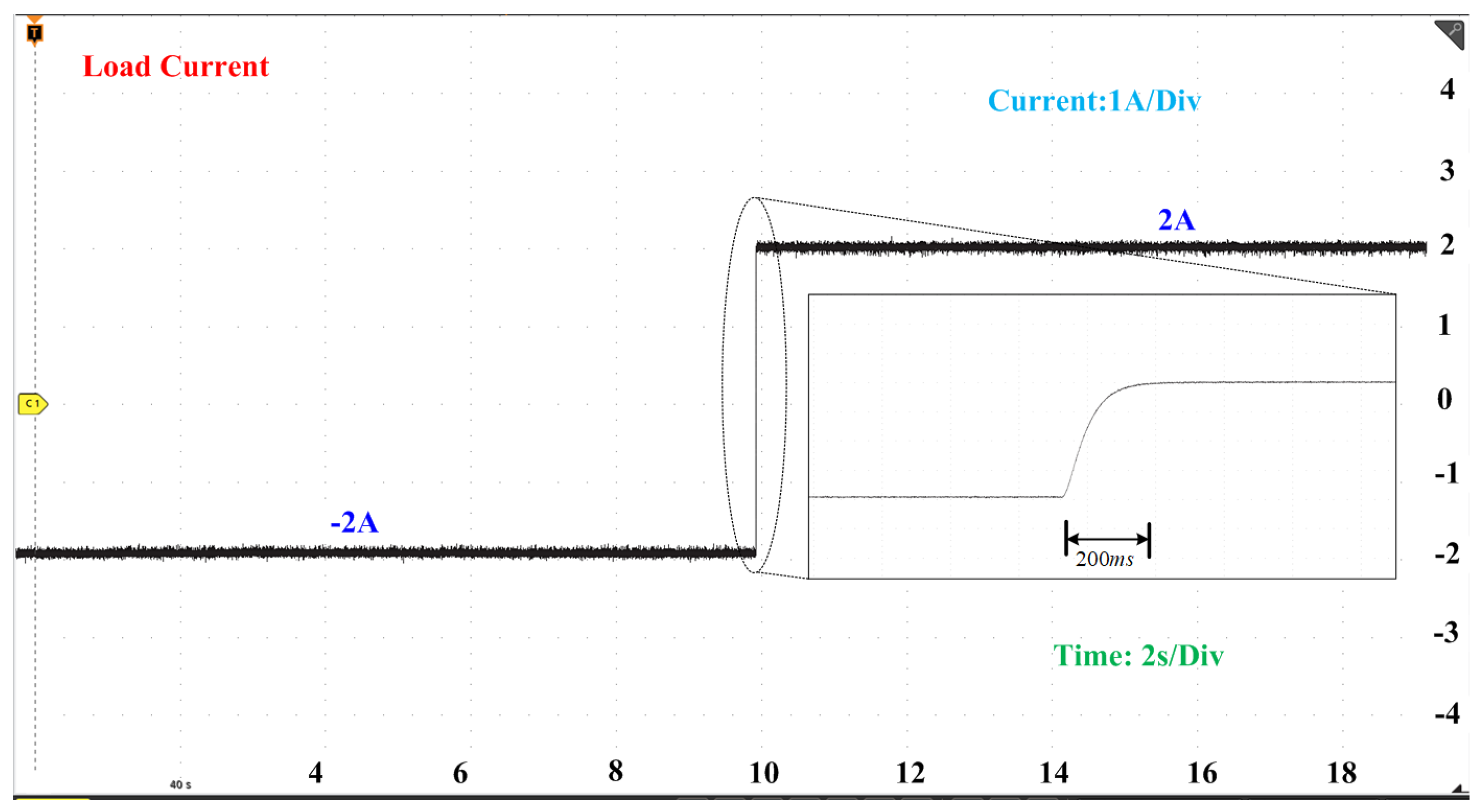
4.2.1. Charging to Discharging Mode
4.2.2. Discharging to Charging Mode
4.3. Hardware Implementation of Bi-Directional Converter Using DNN Controller
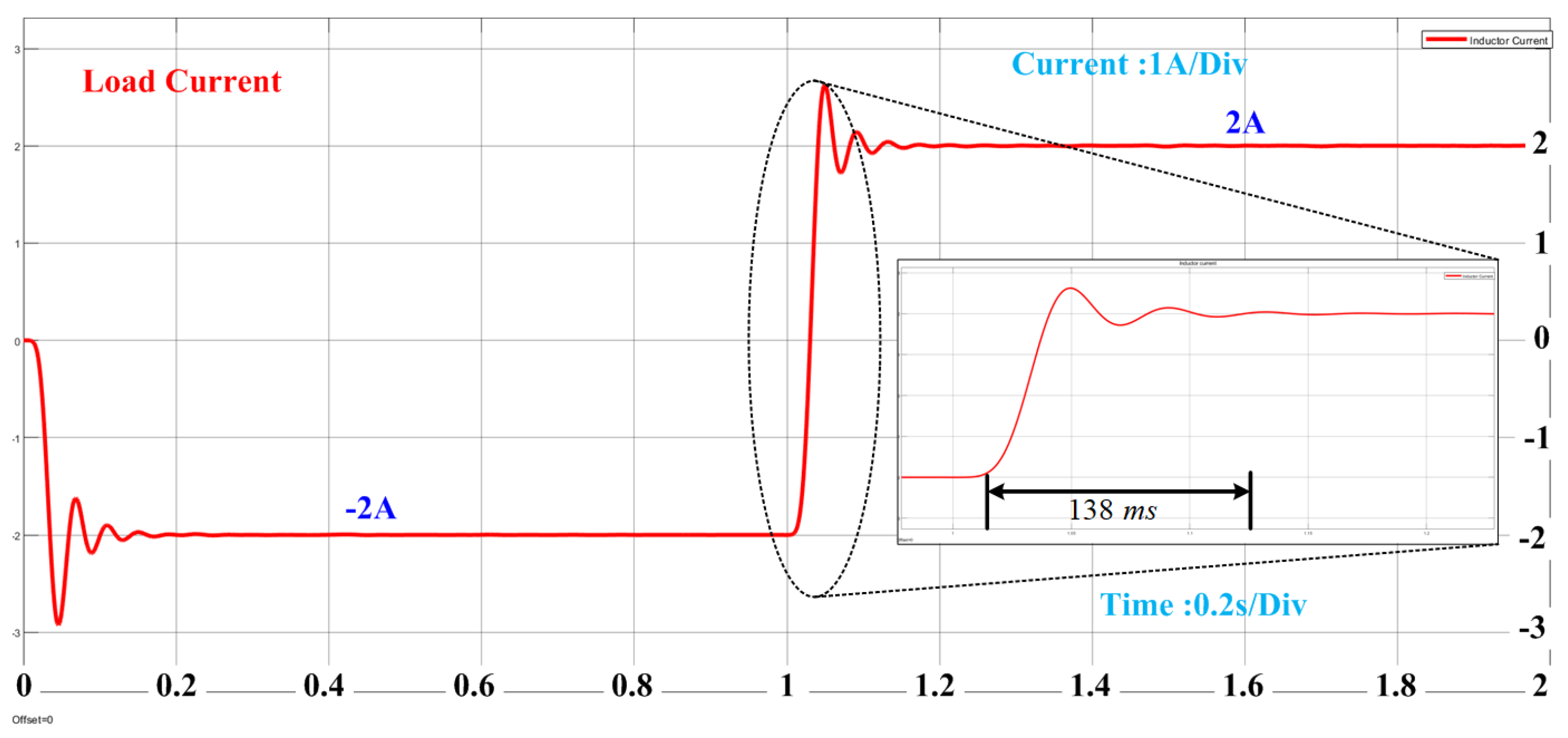
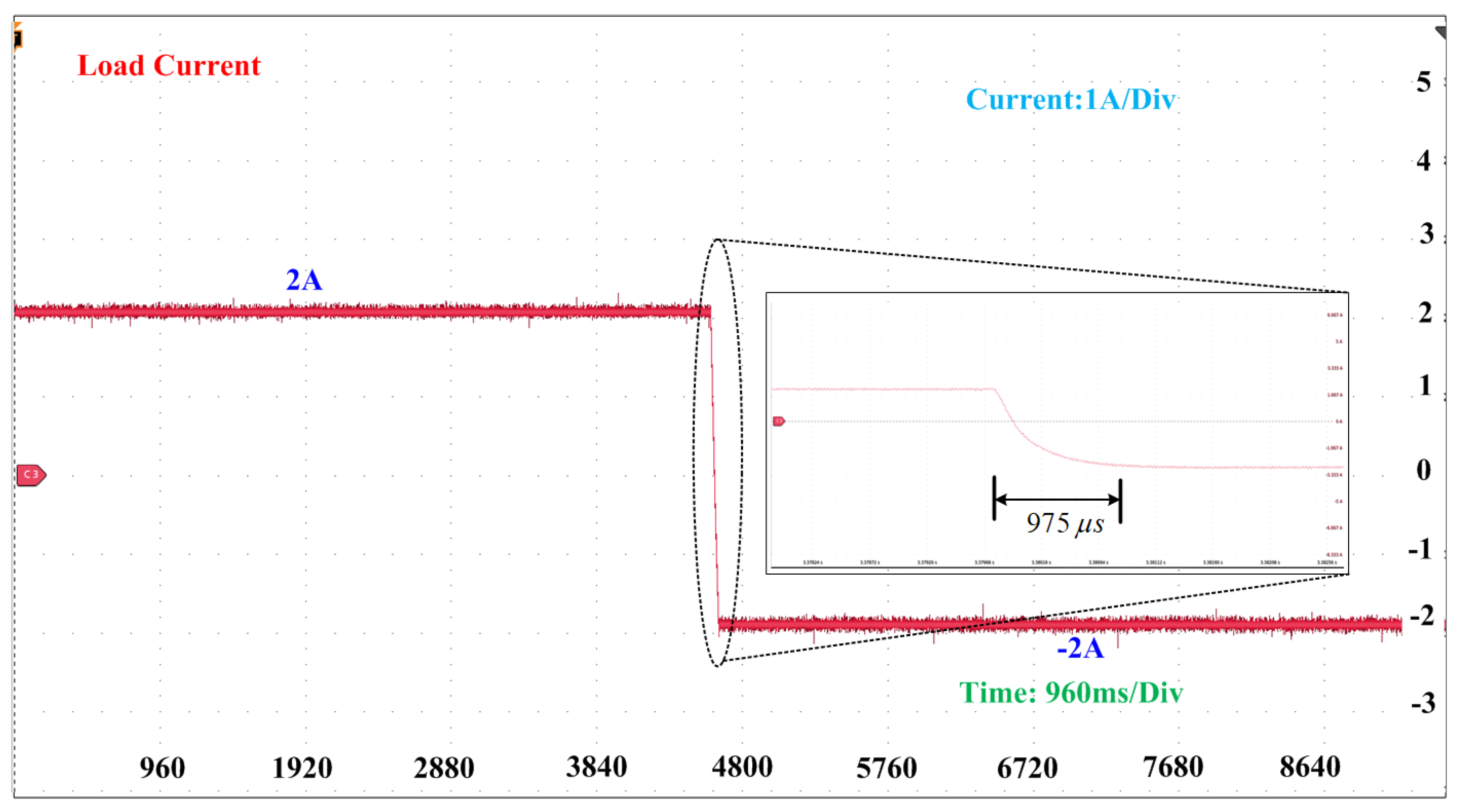
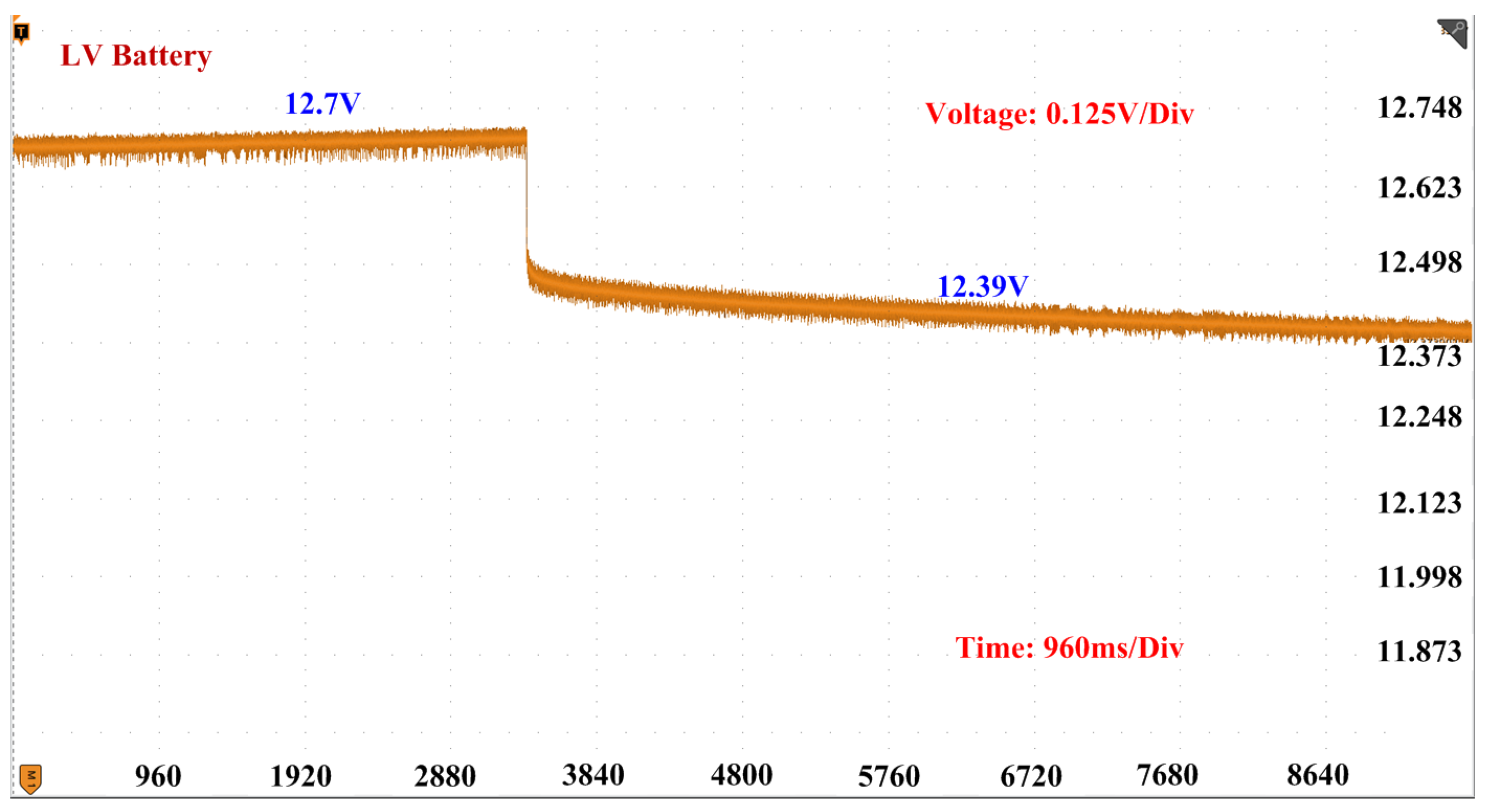
4.3.1. Charging to Discharging Mode
4.3.2. Discharging to Charging Mode
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mai, T.; Hand, M.M.; Baldwin, S.F.; Wiser, R.H.; Brinkman, G.L.; Denholm, P.; Arent, D.J.; Porro, G.; Sandor, D.; Hostick, D.J.; et al. Renewable electricity futures for the United States. IEEE Trans. Sustain. Energy 2013, 5, 372–378. [Google Scholar] [CrossRef]
- Zhang, Y.; Gatsis, N.; Giannakis, G.B. Robust Energy Management for Microgrids with High-Penetration Renewables. IEEE Trans. Sustain. Energy 2013, 4, 944–953. [Google Scholar] [CrossRef]
- Haegel, N.M.; Kurtz, S.R. Global Progress Toward Renewable Electricity: Tracking the Role of Solar. IEEE J. Photovolt. 2021, 11, 1335–1342. [Google Scholar] [CrossRef]
- Li, W.; Yang, M.; Sandu, S. Electric vehicles in China: A review of current policies. Energy Environ. 2018, 29, 1512–1524. [Google Scholar] [CrossRef]
- Vempalli, S.K.; Deepa, K.; Prabhakar, G. A Novel V2V Charging Method Addressing the Last Mile Connectivity. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Chennai, India, 18–21 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, K.; Huang, Y.; Qin, Y.; Hu, C.; Tang, X. Potential and challenges to improve vehicle energy efficiency via V2X: Literature review. Int. J. Veh. Perform. 2021, 7, 244–265. [Google Scholar] [CrossRef]
- Chaitanya, M.; Vinayak, A.; Pavan, B.G.; Lakshmi, N.; Sandeep, K. A Review of Bidirectional DC-DC, DC-AC Converters for V2G and G2V Applications. In Proceedings of the 2023 International Conference on Power, Instrumentation, Energy and Control (PIECON), Aligarh, India, 10–12 February 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Tytelmaier, K.; Husev, O.; Veligorskyi, O.; Yershov, R. A review of non-isolated bidirectional dc-dc converters for energy storage systems. In Proceedings of the 2016 II International Young Scientists Forum on Applied Physics and Engineering (YSF), Kharkiv, Ukraine, 10–14 October 2016; pp. 22–28. [Google Scholar]
- Viswanatha, V.; Ramachandra, A.C.; Reddy, V.S. Bidirectional DC-DC Converter Circuits and Smart Control Algorithms: A Review. J. Electr. Syst. Inf. Technol. 2022, 9, 6. [Google Scholar] [CrossRef]
- Mummadi, V.; Mohan, B.K. Robust digital voltage-mode controller for fifth-order boost converter. IEEE Trans. Ind. Electron. 2010, 58, 263–277. [Google Scholar] [CrossRef]
- Chattopadhyay, S.; Das, S. A Digital Current-Mode Control Technique for DC–DC Converters. IEEE Trans. Power Electron. 2006, 21, 1718–1726. [Google Scholar] [CrossRef]
- Sliding mode control of DC/DC converters. J. Frankl. Inst. 2013, 350, 2146–2165. [CrossRef]
- Utkin, V. Chattering Problem in Sliding Mode Control Systems. In Proceedings of the International Workshop on Variable Structure Systems 2006, VSS’06, Alghero, Sardinia, 26 June 2006; Volume 39, p. 1. [Google Scholar] [CrossRef]
- Ramya, K.; Jegathesan, V. Comparison of pi and pid controlled bidirectional dc-dc converter systems. Int. J. Power Electron. Drive Syst. 2016, 7, 56. [Google Scholar] [CrossRef]
- Mattavelli, P.; Rossetto, L.; Spiazzi, G.; Tenti, P. General-purpose fuzzy controller for DC-DC converters. IEEE Trans. Power Electron. 1997, 12, 79–86. [Google Scholar] [CrossRef]
- Babes, B.; Mekhilef, S.; Boutaghane, A.; Rahmani, L. Fuzzy approximation-based fractional-order nonsingular terminal sliding mode controller for DC–DC buck converters. IEEE Trans. Power Electron. 2021, 37, 2749–2760. [Google Scholar] [CrossRef]
- Yang, C.; Hua, T.; Dai, Y.; Liu, G.; Huang, X.; Zhang, D. Disturbance-Observer-Based Adaptive Fuzzy Control for Islanded Distributed Energy Resource Systems. Math. Probl. Eng. 2022, 2022, 1527705. [Google Scholar] [CrossRef]
- Modelling and control of a non-isolated half-bridge bidirectional DC-DC converter with an energy management topology applicable with EV/HEV. J. King Saud Univ.-Eng. Sci. 2023, 35, 116–122. [CrossRef]
- Pirooz, A.; Noroozian, R. Model predictive control of classic bidirectional DC-DC converter for battery applications. In Proceedings of the 2016 7th Power Electronics and Drive Systems Technologies Conference (PEDSTC), Tehran, Iran, 16–18 February 2016; pp. 517–522. [Google Scholar]
- Machina, V.S.P.; Koduru, S.S.; Madichetty, S.; Mishra, S. Design of ANN Based Controller for Cyberattack Detection in DC-DC Buck Converter. In Proceedings of the 2022 22nd National Power Systems Conference (NPSC), New Delhi, India, 17–19 December 2022; pp. 460–464. [Google Scholar] [CrossRef]
- Zhao, S.; Blaabjerg, F.; Wang, H. An overview of artificial intelligence applications for power electronics. IEEE Trans. Power Electron. 2020, 36, 4633–4658. [Google Scholar] [CrossRef]
- Meireles, M.; Almeida, P.; Simoes, M. A comprehensive review for industrial applicability of artificial neural networks. IEEE Trans. Ind. Electron. 2003, 50, 585–601. [Google Scholar] [CrossRef]
- Srikanth, R.; Venkatesan, M.; Subba Rao, M. Design and performance evaluation of PID, Fuzzy logic and ANN controllers based MPPTs for hybrid electric vehicle applications. Int. J. Ambient Energy 2022, 43, 3661–3675. [Google Scholar] [CrossRef]
- Sankarananth, S.; Sivaraman, P. Performance enhancement of multi-port bidirectional DC-DC converter using resilient backpropagation neural network method. Sustain. Comput. Inform. Syst. 2022, 36, 100783. [Google Scholar] [CrossRef]
- Dong, W.; Li, S.; Fu, X.; Li, Z.; Fairbank, M.; Gao, Y. Control of a buck DC/DC converter using approximate dynamic programming and artificial neural networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1760–1768. [Google Scholar] [CrossRef]
- Banda, M.K.; Koduru, S.S.; Machina, V.S.P.; Madichetty, S. A Deep Learning Based Cyber Attack Detection and Mitigation Scheme in Synchronous Buck Converter. In Proceedings of the 2022 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 14–17 December 2022; pp. 1–6. [Google Scholar]
- Tian, H.; Liu, J.; Wang, Z.; Xie, F.; Cao, Z. Characteristic analysis and circuit implementation of a novel fractional-order memristor-based clamping voltage drift. Fractal Fract. 2022, 7, 2. [Google Scholar] [CrossRef]
- Fan, X.; Wei, G.; Lin, X.; Wang, X.; Si, Z.; Zhang, X.; Shao, Q.; Mangin, S.; Fullerton, E.; Jiang, L.; et al. Reversible switching of interlayer exchange coupling through atomically thin VO2 via electronic state modulation. Matter 2020, 2, 1582–1593. [Google Scholar] [CrossRef]
- Wu, Z.; Lin, B.; Fan, J.; Zhao, J.; Zhang, Q.; Li, L. Effect of dielectric relaxation of epoxy resin on dielectric loss of medium-frequency transformer. IEEE Trans. Dielectr. Electr. Insul. 2022, 29, 1651–1658. [Google Scholar] [CrossRef]
- Ge, L.; Du, T.; Li, C.; Li, Y.; Yan, J.; Rafiq, M.U. Virtual collection for distributed photovoltaic data: Challenges, methodologies, and applications. Energies 2022, 15, 8783. [Google Scholar] [CrossRef]
- He, Y.; Wang, F.; Du, G.; Pan, L.; Wang, K.; Gerhard, R.; Plath, R.; Rozga, P.; Trnka, P. Revisiting the thermal ageing on the metallised polypropylene film capacitor: From device to dielectric film. High Voltage 2023, 8, 305–314. [Google Scholar] [CrossRef]
- Lin, X.; Wen, Y.; Yu, R.; Yu, J.; Wen, H. Improved weak grids synchronization unit for passivity enhancement of grid-connected inverter. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 7084–7097. [Google Scholar] [CrossRef]
- Lin, X.; Yu, R.; Yu, J.; Wen, H. Constant coupling effect-based PLL for synchronization stability enhancement of grid-connected converter under weak grids. IEEE Trans. Ind. Electron. 2022, 70, 11310–11323. [Google Scholar] [CrossRef]
- Chen, C.; Wu, X.; Yuan, X.; Zheng, X. A New Technique for the Subdomain Method in Predicting Electromagnetic Performance of Surface-Mounted Permanent Magnet Motors with Shaped Magnets and a Quasi-Regular Polygon Rotor Core. IEEE Trans. Energy Convers. 2022, 38, 1396–1409. [Google Scholar] [CrossRef]
- Chung, K.L.; Tian, H.; Wang, S.; Feng, B.; Lai, G. Miniaturization of microwave planar circuits using composite microstrip/coplanar-waveguide transmission lines. Alex. Eng. J. 2022, 61, 8933–8942. [Google Scholar] [CrossRef]
- Muhammad, I.; Ali, A.; Zhou, L.; Zhang, W.; Wong, P.K.J. Vacancy-engineered half-metallicity and magnetic anisotropy in CrSI semiconductor monolayer. J. Alloys Compd. 2022, 909, 164797. [Google Scholar] [CrossRef]
- Gao, Y.; Doppelbauer, M.; Ou, J.; Qu, R. Design of a double-side flux modulation permanent magnet machine for servo application. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 1671–1682. [Google Scholar] [CrossRef]
- Zhu, L.; Li, Z.; Hou, K. Effect of radical scavenger on electrical tree in cross-linked polyethylene with large harmonic superimposed DC voltage. High Volt. 2022, 8, 739–748. [Google Scholar] [CrossRef]
- Cao, B.; Dong, W.; Lv, Z.; Gu, Y.; Singh, S.; Kumar, D.P. Hybrid Microgrid Many-Objective Sizing Optimization With Fuzzy Decision. IEEE Trans. Fuzzy Syst. 2020, 28, 2702–2710. [Google Scholar] [CrossRef]
- Li, J.; Deng, Y.; Sun, W.; Li, W.; Li, R.; Li, Q.; Liu, Z. Resource orchestration of cloud-edge–based smart grid fault detection. ACM Trans. Sens. Netw. TOSN 2022, 18, 1–26. [Google Scholar] [CrossRef]
- Wang, H.; Wu, X.; Zheng, X.; Yuan, X. Model predictive current control of nine-phase open-end winding pmsms with an online virtual vector synthesis strategy. IEEE Trans. Ind. Electron. 2022, 70, 2199–2208. [Google Scholar] [CrossRef]
- Liu, S.; Song, Z.; Dong, Z.; Liu, Y.; Liu, C. Generic carrier-based PWM solution for series-end winding PMSM traction system with adaptative overmodulation scheme. IEEE Trans. Transp. Electrif. 2022, 9, 712–726. [Google Scholar] [CrossRef]
- Tang, H.; Di, J.; Wu, Z.; Li, W. Temperature analysis for the asymmetric six-phase permanent magnet synchronous motor in healthy and fault-tolerant modes. IEEE Trans. Ind. Electron. 2022, 70, 6482–6493. [Google Scholar] [CrossRef]
- Liu, S.; Song, Z.; Liu, Y.; Chen, Y.; Liu, C. Flux-weakening controller design of dual three-phase PMSM drive system with copper loss minimization. IEEE Trans. Power Electron. 2022, 38, 2351–2363. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Virtual-vector-based robust predictive current control for dual three-phase PMSM. IEEE Trans. Ind. Electron. 2020, 68, 2048–2058. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Direct harmonic current control scheme for dual three-phase PMSM drive system. IEEE Trans. Power Electron. 2021, 36, 11647–11657. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Zhao, H.; Liu, Y.; Dong, Z. Improved flux weakening control strategy for five-phase PMSM considering harmonic voltage vectors. IEEE Trans. Power Electron. 2022, 37, 10967–10980. [Google Scholar] [CrossRef]
- Duan, Y.; Zhao, Y.; Hu, J. An initialization-free distributed algorithm for dynamic economic dispatch problems in microgrid: Modeling, optimization and analysis. Sustain. Energy Grids Netw. 2023, 34, 101004. [Google Scholar] [CrossRef]
- Taghieh, A.; Mohammadzadeh, A.; Zhang, C.; Kausar, N.; Castillo, O. A type-3 fuzzy control for current sharing and voltage balancing in microgrids. Appl. Soft Comput. 2022, 129, 109636. [Google Scholar] [CrossRef]
- Huang, N.; Chen, Q.; Cai, G.; Xu, D.; Zhang, L.; Zhao, W. Fault diagnosis of bearing in wind turbine gearbox under actual operating conditions driven by limited data with noise labels. IEEE Trans. Instrum. Meas. 2020, 70, 1–10. [Google Scholar] [CrossRef]
- Lin, L.; Zhang, J.; Gao, X.; Shi, J.; Chen, C.; Huang, N. Power fingerprint identification based on the improved VI trajectory with color encoding and transferred CBAM-ResNet. PLoS ONE 2023, 18, e0281482. [Google Scholar]
- Xu, S.; Huang, W.; Huang, D.; Chen, H.; Chai, Y.; Ma, M.; Zheng, W.X. A Reduced-Order Observer-Based Method for Simultaneous Diagnosis of Open-Switch and Current Sensor Faults of a Grid-Tied NPC Inverter. IEEE Trans. Power Electron. 2023. [Google Scholar] [CrossRef]
- Zhang, Z.; Altalbawy, F.M.; Al-Bahrani, M.; Riadi, Y. Regret-based multi-objective optimization of carbon capture facility in CHP-based microgrid with carbon dioxide cycling. J. Clean. Prod. 2023, 384, 135632. [Google Scholar] [CrossRef]
- Xiao, S.; Wang, Z.; Wu, G.; Guo, Y.; Gao, G.; Zhang, X.; Cao, Y.; Zhang, Y.; Yu, J.; Liu, P.; et al. The impact analysis of operational overvoltage on traction transformers for high-speed trains based on the improved capacitor network methodology. IEEE Trans. Transp. Electrif. 2023. [Google Scholar] [CrossRef]
- Hu, W.; Wang, T.; Chu, F. A novel Ramanujan digital twin for motor periodic fault monitoring and detection. IEEE Trans. Ind. Inform. 2023, 19, 11564–11572. [Google Scholar] [CrossRef]
- Kim, S.K.; Park, C.R.; Kim, J.S.; Lee, Y.I. A stabilizing model predictive controller for voltage regulation of a DC/DC boost converter. IEEE Trans. Control. Syst. Technol. 2014, 22, 2016–2023. [Google Scholar] [CrossRef]
- Matlab. Manual of Neural Network Toolbox [Online]. 2005. Available online: http://matlab.izmiran.ru/help/toolbox/nnet/ (accessed on 1 October 2022).
- Xiang, J.; Deng, L.; Zhou, C.; Zhao, H.; Huang, J.; Tao, S. Heat transfer performance and structural optimization of a novel micro-channel heat sink. Chin. J. Mech. Eng. 2022, 35, 1–12. [Google Scholar] [CrossRef]
- Xiang, J.; Yang, W.; Liao, H.; Li, P.; Chen, Z.; Huang, J. Design and thermal performance of thermal diode based on the asymmetric flow resistance in vapor channel. Int. J. Therm. Sci. 2023, 191, 108345. [Google Scholar] [CrossRef]
- Dang, W.; Liao, S.; Yang, B.; Yin, Z.; Liu, M.; Yin, L.; Zheng, W. An encoder-decoder fusion battery life prediction method based on Gaussian process regression and improvement. J. Energy Storage 2023, 59, 106469. [Google Scholar] [CrossRef]
- Wang, J.; Tian, J.; Zhang, X.; Yang, B.; Liu, S.; Yin, L.; Zheng, W. Control of time delay force feedback teleoperation system with finite time convergence. Front. Neurorobotics 2022, 16, 877069. [Google Scholar] [CrossRef]
- Gu, Q.; Tian, J.; Yang, B.; Liu, M.; Gu, B.; Yin, Z.; Yin, L.; Zheng, W. A novel architecture of a six degrees of freedom parallel platform. Electronics 2023, 12, 1774. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Epochs | Optimizer | Activation Function | ||
|---|---|---|---|---|
| Sigmoid | ReLU | Tanh | ||
| 50 | Adam | 0.02256 | 0.00082 | 0.003549 |
| RMSprop | 0.03945 | 0.00652 | 0.00701 | |
| SGD | 0.15299 | 0.00091 | 0.00752 | |
| 100 | Adam | 0.00707 | 0.00049 | 0.00089 |
| RMSprop | 0.03002 | 0.00278 | 0.00291 | |
| SGD | 0.08281 | 0.00028 | 0.00457 | |
| 150 | Adam | 0.00501 | 0.00161 | 0.00191 |
| RMSprop | 0.00635 | 0.00381 | 0.00514 | |
| SGD | 0.04432 | 0.00060 | 0.00402 | |
| Parameters | DNN |
|---|---|
| Weight update rule | SGD |
| Performance metric | RMSE |
| Epochs | 100 |
| Activation function | ReLU |
| No. of input nodes | 4 |
| No. of hidden layer1 nodes | 10 |
| No. of hidden layer2 nodes | 10 |
| No. of output layer nodes | 1 |
| Specifications | Value |
|---|---|
| Input voltage | 15–80 V |
| Output voltage | 0–50 V |
| Output current | 30 A |
| Efficiency | 99.6% |
| Frequency | 39 kHz |
| Inductor | 72 H |
| Capacitor | 470 f |
| MOSFETs | IRFP260N |
| Controller | Settling Time |
|---|---|
| [14] PI controller | 120 ms |
| [19] Model predictive controller | 70 ms |
| [24] back propagation neuro controller | 50 ms |
| [16] approximation fuzzy controller | 7 ms |
| [25] Dynamic programming ANN controller | 4 ms |
| [17] observer based adaptive fuzzy controller | 1 ms |
| Proposed controller | 975 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Banda, M.K.; Madichetty, S.; Nandavaram Banda, S.K. Implementation of Deep Learning-Based Bi-Directional DC-DC Converter for V2V and V2G Applications—An Experimental Investigation. Energies 2023, 16, 7614. https://doi.org/10.3390/en16227614
Banda MK, Madichetty S, Nandavaram Banda SK. Implementation of Deep Learning-Based Bi-Directional DC-DC Converter for V2V and V2G Applications—An Experimental Investigation. Energies. 2023; 16(22):7614. https://doi.org/10.3390/en16227614
Chicago/Turabian StyleBanda, Mohan Krishna, Sreedhar Madichetty, and Shanthi Kumar Nandavaram Banda. 2023. "Implementation of Deep Learning-Based Bi-Directional DC-DC Converter for V2V and V2G Applications—An Experimental Investigation" Energies 16, no. 22: 7614. https://doi.org/10.3390/en16227614
APA StyleBanda, M. K., Madichetty, S., & Nandavaram Banda, S. K. (2023). Implementation of Deep Learning-Based Bi-Directional DC-DC Converter for V2V and V2G Applications—An Experimental Investigation. Energies, 16(22), 7614. https://doi.org/10.3390/en16227614