


Identification and Analysis of Noise Sources of Permanent Magnet Synchronous Traction Motor with Interior Permanent Magnet



Abstract
:1. Introduction
1.1. Noise Sources
- Mechanical;
- Aerodynamic;
- Magnetic.
- The accuracy of their parts;
- The frequency of mechanical resonance in the outer ring;
- The speed;
- Lubrication conditions;
- Tolerances;
- The alignment;
- The load;
- The lubricant temperature;
- The stability and spin of the oil film in the bearing;
- The manufacturing process;
- The quality and assembly.
1.2. Vibration and Noise Reduction Methods
- Increasing the stator and housing stiffness, but this approach is mostly associated with increasing the weight of the motor. Therefore, it is contrary to current trends of minimizing the weight of drives used in vehicles.
- Reducing the value of the electromagnetic excitation force [27]. In this method, especially in motors with magnets, the value of the force that is responsible for the motor’s torque is also reduced. This affects the deterioration of motor performance.
- The appropriate selection of the number of slots and the number of poles of the motor [14], so as to minimize the effect of Maxwell stresses on the stator structure over the entire range from the speed of the motor. The method allows us to reduce noise during machine design.
2. Traction Motor Design
3. Theoretical Analysis of Maxwell’s Forces and Stresses in an Electromagnetic Motor Model
4. Vibroacoustic Analysis of the Electromagnetic Motor Circuit
5. Results of the Calculation with the Motor Housing
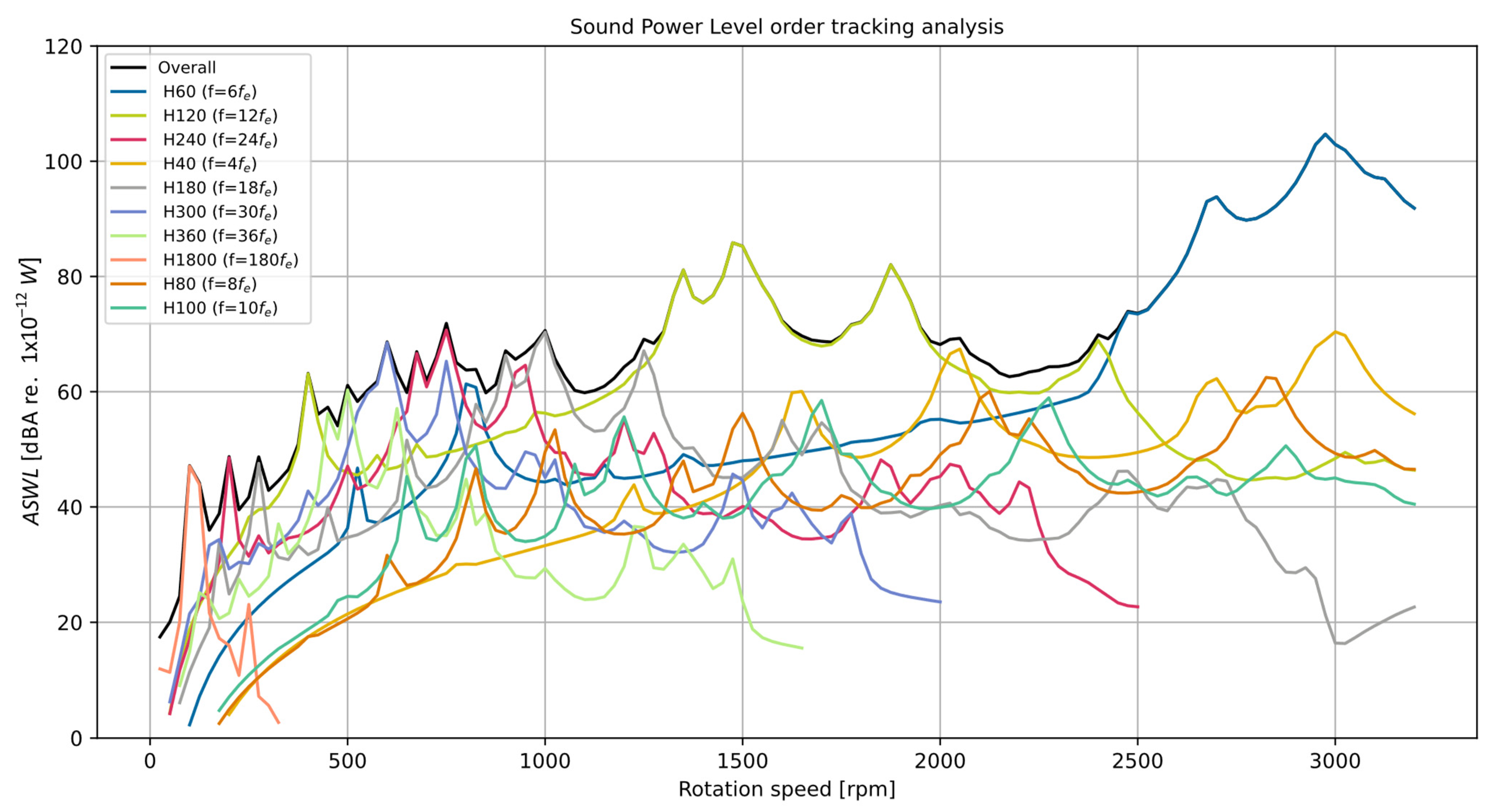
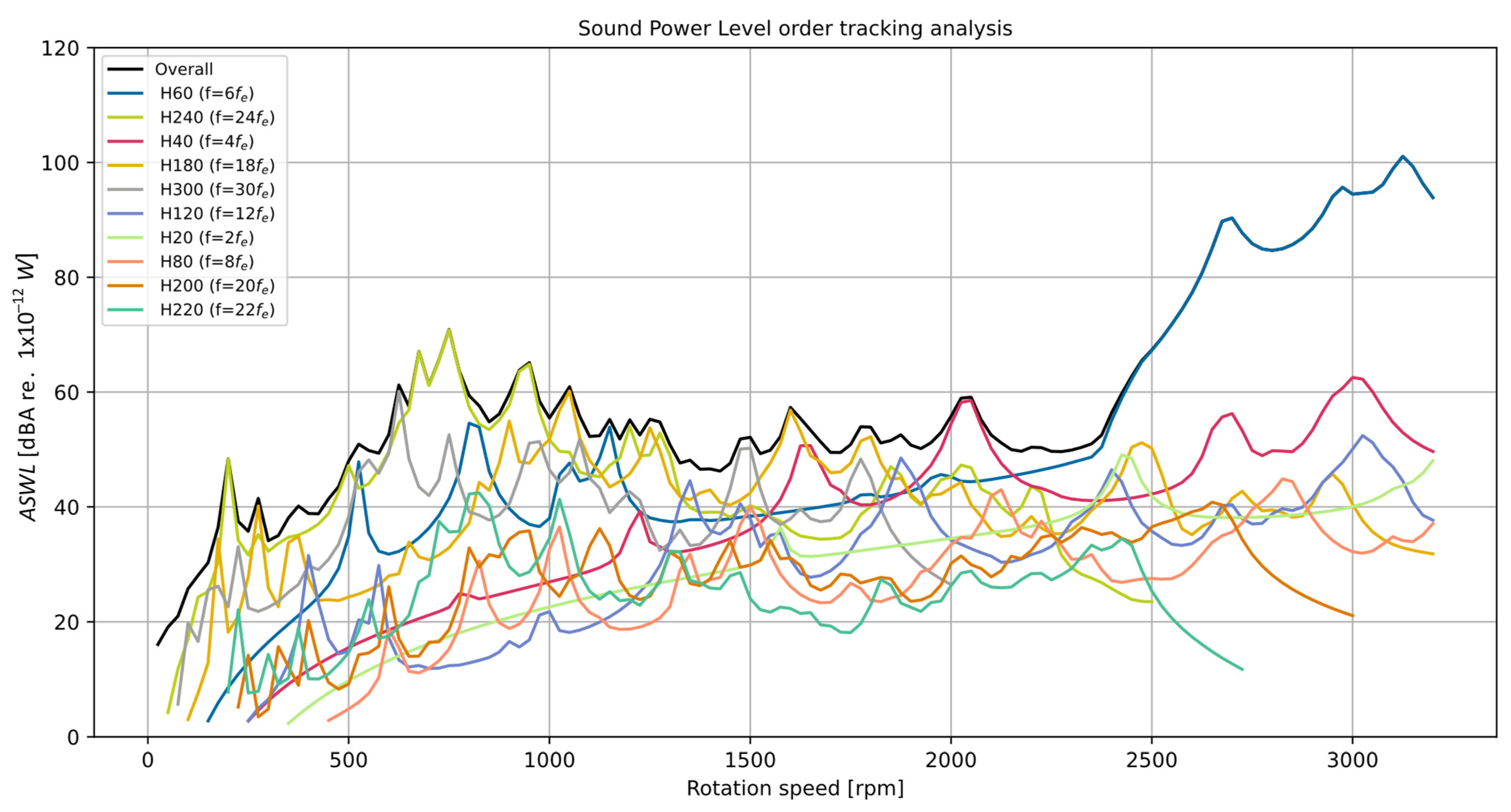
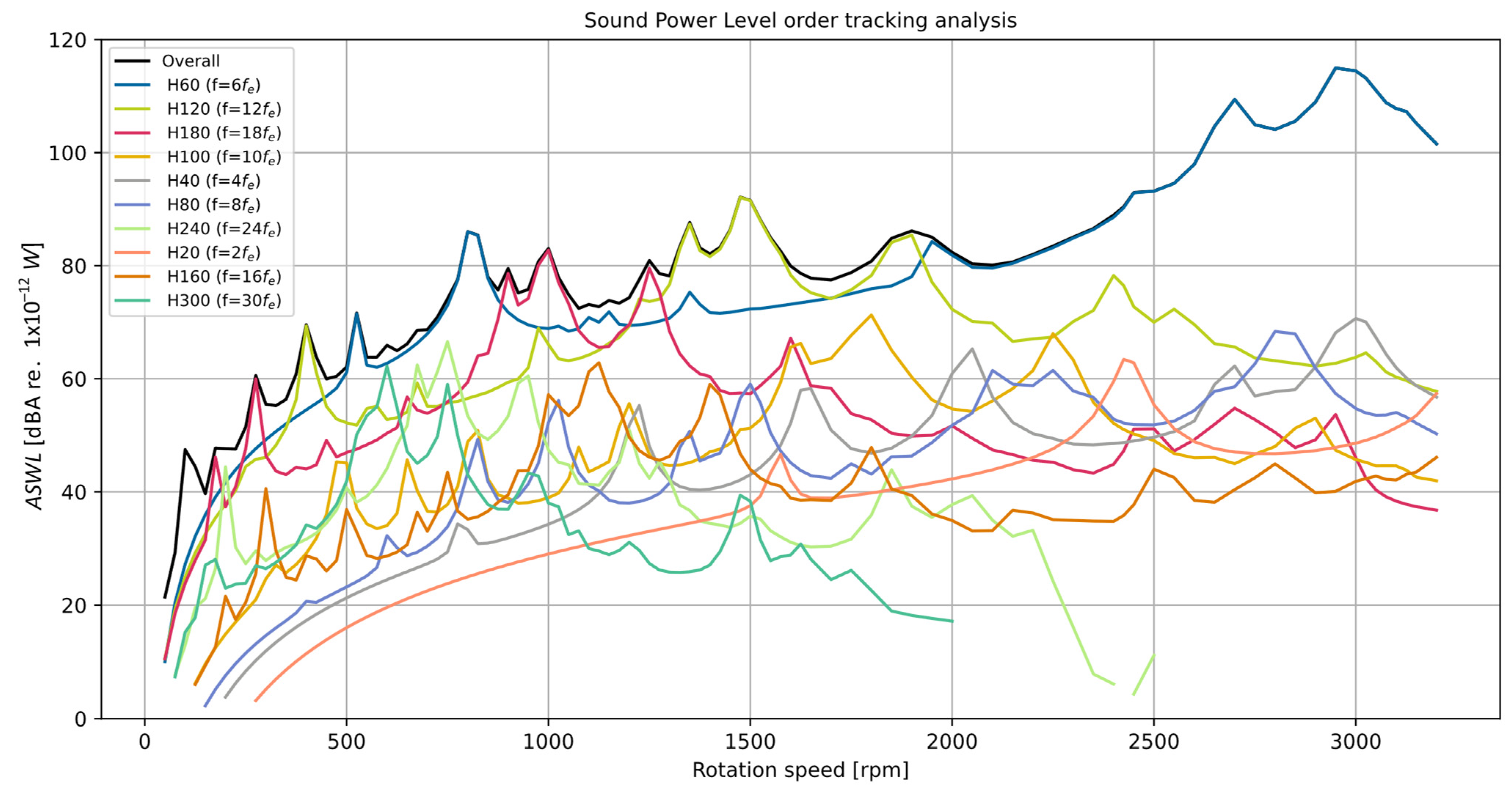
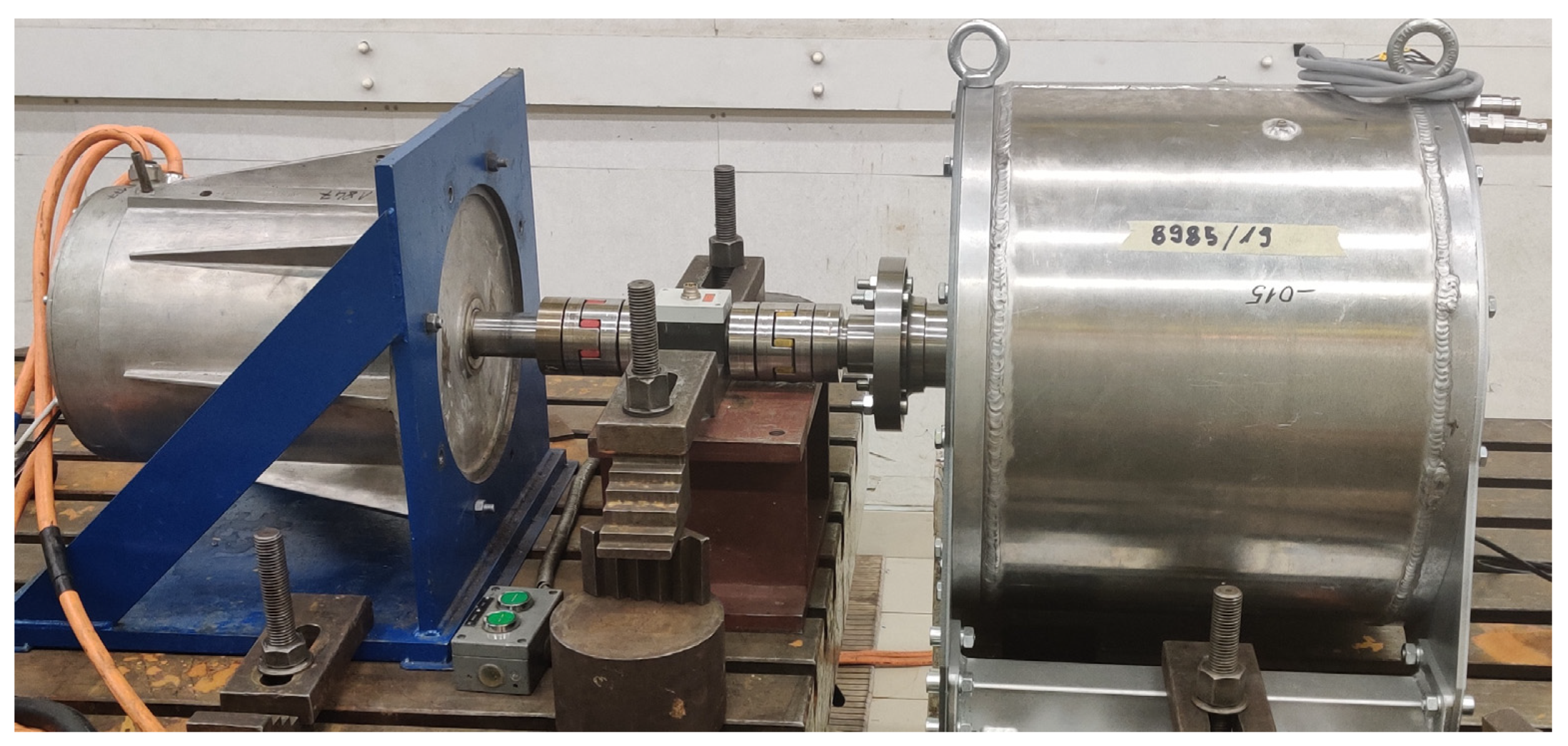
6. Laboratory Test Results of the SMwsK280M20 Motor
7. Discussion
8. Conclusions
- Some of the most important factors affecting motor noise and vibration are the resonance of magnetic force frequencies from permanent magnets, the natural frequencies of the stator and housing, and harmonics from the supply current. The resonance of these frequencies leads to excessive deformation of the stator, which is transferred to the housing and radiates as acoustic noise. Therefore, the material of the motor housing should be properly selected, because as a part of the motor it can both amplify and dampen the noise coming from the stator;
- Another very important issue affecting the noise level generated in traction motors is the proper selection of the number of slots and poles;
- Another important factor to consider when designing a motor is the effect of the thickness of the stator yoke, the shape of the stator teeth, and the mass of the winding on the stator natural frequencies;
- Noise in traction motors can also be caused by the interaction of permanent magnets in or on the rotor with the stator teeth (torque). In many motors, an important part of noise reduction is the use of skewed stator slots or rotor magnets. However, for higher-horsepower high-speed motors operating in the speed range of 0 to 3000 rpm, the effect of the skew on noise is small, and the main source of noise is the 0-mode (breathing) forces, which for this size of machine have frequencies close to the natural vibration of the housing as well as the motor stator.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Directive (EU) 2019/1161 of the European Parliament and of the Council of 20 June 2019—Amending Directive 2009/33/EC on the Promotion of Clean and Energy-Efficient Road Transport Vehicles. Available online: https://eur-lex.europa.eu/eli/dir/2019/1161/oj (accessed on 10 August 2023).
- Hurtley, C.; World Health Organization (Eds.) Night Noise Guidelines for Europe; World Health Organization Europe: Copenhagen, Denmark, 2009; ISBN 978-92-890-4173-7. [Google Scholar]
- Commission Delegated Regulation (EU) 2019/839 of 7 March 2019—Amending Regulation (EU) No 540/2014 of the European Parliament and of the Council on the Sound Level of Motor Vehicles and of Replacement Silencing Systems. Available online: https://eur-lex.europa.eu/eli/reg_del/2019/839/oj (accessed on 10 August 2023).
- Hofmann, A.; Qi, F.; Lange, T.; De Doncker, R.W. The Breathing Mode-Shape 0: Is It the Main Acoustic Issue in the PMSMs of Today’s Electric Vehicles? In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 3067–3073. [Google Scholar]
- Fastl, H.; Zwicker, E. Psychoacoustics: Facts and Models, 3rd ed.; Springer Series in Information Sciences; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2007; ISBN 978-3-540-23159-2. [Google Scholar]
- Wang, Z.; Zhang, C.; Song, Q.; Fan, J.; Zhang, C. Research on Noise Source Identification of Traction Motor System for Electric Buses Based on Sound Intensity. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–4. [Google Scholar]
- Lai, J.C.; Gieras, J.F.; Wang, C. Noise of Polyphase Electric Motors; CRC Press: Boca Raton, FL, USA.
- Król, E.; Maciążek, M.; Wolnik, T. Review of Vibroacoustic Analysis Methods of Electric Vehicles Motors. Energies 2023, 16, 2041. [Google Scholar] [CrossRef]
- Devillers, E.; Gning, P.; Besnerais, J.L. Effect of Uneven Magnetization on Magnetic Noise and Vibrations in PMSM—Application to EV HEV Electric Motor NVH. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23 August 2020; pp. 1786–1792. [Google Scholar]
- Wang, Y.; Gao, H.; Wang, H.; Ma, W. NVH Optimization Analysis of Permanent Magnet Synchronous Motor by Rotor Slotting. Vehicles 2020, 2, 287–302. [Google Scholar] [CrossRef]
- La Delfa, P.; Hecquet, M.; Gillon, F.; Le Besnerais, J. Analysis of Radial Force Harmonics in PMSM Responsible for Electromagnetic Noise. In Proceedings of the 2015 Tenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 31 March 2015; pp. 1–6. [Google Scholar]
- Islam, R.; Husain, I. Analytical Model for Predicting Noise and Vibration in Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Appl. 2010, 46, 2346–2354. [Google Scholar] [CrossRef]
- Das, S.; Chowdhury, A.; Paul, S.; Wan, Z.; Islam, R.; Sozer, Y. Experimental and Simulation Based Study of Vibration Prediction in Fractional Slot Permanent Magnet Synchronous Machines. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 11–15 May 2019; pp. 1138–1143. [Google Scholar]
- Le Besnerais, J. Vibroacoustic Analysis of Radial and Tangential Air-Gap Magnetic Forces in Permanent Magnet Synchronous Machines. IEEE Trans. Magn. 2015, 51, 1–9. [Google Scholar] [CrossRef]
- Zuo, S.; Lin, F.; Wu, X. Noise Analysis, Calculation, and Reduction of External Rotor Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2015, 62, 6204–6212. [Google Scholar] [CrossRef]
- Kim, K.-T.; Kim, K.-S.; Hwang, S.-M.; Kim, T.-J.; Jung, Y.-H. Comparison of Magnetic Forces for IPM and SPM Motor with Rotor Eccentricity. IEEE Trans. Magn. 2001, 37, 3448–3451. [Google Scholar] [CrossRef]
- Chai, F.; Bi, Y.; Chen, L. A Comparison between Axial and Radial Flux Permanent Magnet In-Wheel Motors for Electric Vehicle. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23 August 2020; pp. 1685–1690. [Google Scholar]
- Messali, A.; Ghanes, M.; Koteich, M.; Hamida, M.A. A Robust Observer of Rotor Position and Speed for IPMSM HFI Sensorless Drives. In Proceedings of the 2018 IEEE 9th International Symposium on Sensorless Control for Electrical Drives (SLED), Helsinki, Finland, 13–14 September 2018; pp. 90–95. [Google Scholar]
- Sarrio, J.E.R.; Ciceo, S.; Martis, C.; Chauvicourt, F. Comparative Study between PMSM Models Used for NVH System-Level Simulation. In Proceedings of the 2019 Electric Vehicles International Conference (EV), Bucharest, Romania, 3–4 October 2019; pp. 1–5. [Google Scholar]
- Li, Q.; Fan, T.; Wen, X.; Li, Y.; Wang, Z.; Guo, J. Design Optimization of Interior Permanent Magnet Sychronous Machines for Traction Application over a given Driving Cycle. In Proceedings of the IECON 2017 43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1900–1904. [Google Scholar]
- Rahman, M.A. High Efficiency IPM Motor Drives for Hybrid Electric Vehicles. In Proceedings of the 2007 Canadian Conference on Electrical and Computer Engineering, Vancouver, BC, Canada, 22–26 April 2007; pp. 252–255. [Google Scholar]
- Wu, Q.; Wang, T.; Li, X. Loss-Minimizing Control Based on QP Sequence of the IPMSM Drive Systems for Electric Vehicles. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 797–801. [Google Scholar]
- Schoenen, T.; Krings, A.; van Treek, D.; De Doncker, R.W. Maximum DC-Link Voltage Utilization for Optimal Operation of IPMSM. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 1547–1550. [Google Scholar]
- Le Besnerais, J. Fast Prediction of Variable-Speed Acoustic Noise Due to Magnetic Forces in Electrical Machines. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 2259–2265. [Google Scholar]
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Trans. Transp. Electrif. 2015, 1, 245–254. [Google Scholar] [CrossRef]
- Kiyota, K.; Kakishima, T.; Chiba, A.; Rahman, M.A. Cylindrical Rotor Design for Acoustic Noise and Windage Loss Reduction in Switched Reluctance Motor for HEV Applications. IEEE Trans. Ind. Appl. 2016, 52, 154–162. [Google Scholar] [CrossRef]
- Jung, J.-W.; Lee, S.-H.; Lee, G.-H.; Hong, J.-P.; Lee, D.-H.; Kim, K.-N. Reduction Design of Vibration and Noise in IPMSM Type Integrated Starter and Generator for HEV. IEEE Trans. Magn. 2010, 46, 2454–2457. [Google Scholar] [CrossRef]
- Pile, R.; Le Menach, Y.; Le Besnerais, J.; Parent, G. Study of the Combined Effects of the Air-Gap Transfer for Maxwell Tensor and the Tooth Mechanical Modulation in Electrical Machines. IEEE Trans. Magn. 2020, 56, 7502004. [Google Scholar] [CrossRef]
- Devillers, E.; Hecquet, M.; Devillers, E.; Le Besnerais, J. A New Hybrid Method for the Fast Computation of Airgap Flux and Magnetic Forces in IPMSM. In Proceedings of the 2017 Twelfth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 11–13 April 2017; pp. 1–8. [Google Scholar]
- Andersson, A.; Thiringer, T. Electrical Machine Acoustic Noise Reduction Based on Rotor Surface Modifications. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar]
- Harries, M.; Woerndle, A.; De Doncker, R.W. Low Vibrations and Improved NVH in Permanent Magnet Synchronous Machines Due to Injection of Flux-Linkage Harmonics. IEEE J. Emerg. Sel. Topics Power Electron. 2021, 10, 1649–1657. [Google Scholar] [CrossRef]
- Franck, D.; van der Giet, M.; Hameyer, K. Active Reduction of Audible Noise Exciting Radial Force-Density Waves in Induction Motors. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 1213–1218. [Google Scholar]
- Cassoret, B.; Corton, R.; Roger, D.; Brudny, J.-F. Magnetic Noise Reduction of Induction Machines. IEEE Trans. Power Electron. 2003, 18, 570–579. [Google Scholar] [CrossRef]
- Kanematsu, M.; Miyajima, T.; Fujimoto, H.; Hori, Y.; Enomoto, T.; Kondou, M.; Komiya, H.; Yoshimoto, K.; Miyakawa, T. Proposal of 6th Radial Force Control Based on Flux Linkage. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 2421–2426. [Google Scholar]
- Liang, J.; Li, Y.; Mak, C.; Bilgin, B.; Al-Ani, D.; Emadi, A. A Comprehensive Analysis of the Acoustic Noise in an Interior Permanent Magnet Traction Motor. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3845–3851. [Google Scholar]
- Jung, J.-W.; Kim, D.-J.; Hong, J.-P.; Lee, G.-H.; Jeon, S.-M. Experimental Verification and Effects of Step Skewed Rotor Type IPMSM on Vibration and Noise. IEEE Trans. Magn. 2011, 47, 3661–3664. [Google Scholar] [CrossRef]
- Pellerey, P.; Favennec, G.; Lanfranchi, V.; Friedrich, G. Active Reduction of Electrical Machines Magnetic Noise by the Control of Low Frequency Current Harmonics. In Proceedings of the IECON 2012 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 1654–1659. [Google Scholar]
- Zhu, W.; Pekarek, S.; Fahimi, B. On the Effect of Stator Excitation on Radial and Tangential Flux and Force Densities in a Permanent Magnet Synchronous Machine. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15–18 May 2005; pp. 346–353. [Google Scholar]
- Hwang, Y.-H.; Lee, J. HEV Motor Comparison of IPMSM With Nd Sintered Magnet and Heavy Rare-Earth Free Injection Magnet in the Same Size. IEEE Trans. Appl. Supercond. 2018, 28, 1–5. [Google Scholar] [CrossRef]
- Kumagai, S.; Inoue, K.; Kato, T. GA Based Optimized Trajectories of Rotating Speed and D-q Axis Currents for an IPMSM. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018—ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 1264–1269. [Google Scholar]
- Chen, B.; Wu, J.; Sun, Q.; Wu, H.; Zhang, L. FEA-Based Mathematical Modeling and Simulation for IPMSM Drive with Consideration of Saturation and Cross-Coupling Influence. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Oh, S.Y.; Cho, S.-Y.; Han, J.-H.; Lee, H.J.; Ryu, G.-H.; Kang, D.; Lee, J. Design of IPMSM Rotor Shape for Magnet Eddy-Current Loss Reduction. IEEE Trans. Magn. 2014, 50, 841–844. [Google Scholar] [CrossRef]
- Jung, Y.-H.; Park, M.-R.; Kim, K.-O.; Chin, J.-W.; Hong, J.-P.; Lim, M.-S. Design of High-Speed Multilayer IPMSM Using Ferrite PM for EV Traction Considering Mechanical and Electrical Characteristics. IEEE Trans. Ind. Appl. 2021, 57, 327–339. [Google Scholar] [CrossRef]
- Woo, J.-H.; Jung, D.-H.; Choi, J.; Kim, H.; Lee, J. A Study on IPMSM Design, as the Load Motor for the Motor Driving Test of Urban Railway Vehicle through HILS, for Achieving High Power Density. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Andresen, J.; Vip, S.; Mertens, A.; Paulus, S. Theory of Influencing the Breathing Mode and Torque Pulsations of Permanent Magnet Electric Machines with Harmonic Currents. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Lyon, France, 7–11 September 2020; pp. P.1–P.9. [Google Scholar]
- Mao, Y.; Liu, G.; Chen, Q.; Zhou, H. Mitigation of Acoustic Noise by Minimize Torque and Radial Force Fluctuation in Fault Tolerant Permanent Magnet Machines. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 60–64. [Google Scholar]
- Nagelkramer, J.; Heitmann, A.; Parspour, N. Application of Dynamic Programming for Active Noise Reduction of PMSM by Reducing Torque Ripple and Radial Force Harmonics. In Proceedings of the 2018 AEIT International Annual Conference, Bari, Italy, 3–5 October 2018; pp. 1–6. [Google Scholar]
- Bonneel, P.; Besnerais, J.L.; Devillers, E.; Marinel, C.; Pile, R. Design Optimization of Innovative Electrical Machines Topologies Based on Pyleecan Open-Source Object-Oriented Software. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; pp. 2493–2499. [Google Scholar]
- PN-EN 60034-9:2009; Rotating Electrical Machines—Part 9: Permissible Noise Levels. Polish Standardization Committee: Warsaw, Poland, 2009.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Outer diameter of the stator | mm | 470 |
| Inner diameter of the stator | mm | 382 |
| Length of stator and rotor package | mm | 170 |
| Number of stator slots | - | 60 |
| Number of poles | - | 20 |
| Type of magnets | - | N42UH |
| Thickness of magnet | mm | 6 |
| Maximum power | kW | 280 |
| Maximum torque | Nm | 2400 |
| Maximum speed | rpm | 3000 |
| Efficiency | % | 96 |
| Weight | kg | 275 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Król, E.; Maciążek, M. Identification and Analysis of Noise Sources of Permanent Magnet Synchronous Traction Motor with Interior Permanent Magnet. Energies 2023, 16, 6018. https://doi.org/10.3390/en16166018
Król E, Maciążek M. Identification and Analysis of Noise Sources of Permanent Magnet Synchronous Traction Motor with Interior Permanent Magnet. Energies. 2023; 16(16):6018. https://doi.org/10.3390/en16166018
Chicago/Turabian StyleKról, Emil, and Marcin Maciążek. 2023. "Identification and Analysis of Noise Sources of Permanent Magnet Synchronous Traction Motor with Interior Permanent Magnet" Energies 16, no. 16: 6018. https://doi.org/10.3390/en16166018
APA StyleKról, E., & Maciążek, M. (2023). Identification and Analysis of Noise Sources of Permanent Magnet Synchronous Traction Motor with Interior Permanent Magnet. Energies, 16(16), 6018. https://doi.org/10.3390/en16166018