
A Type-2 Fuzzy Controller for Floating Tension-Leg Platforms in Wind Turbines

 , , , ,
, , , ,  ,
,  and
and 
Abstract
:1. Introduction
- Development of a new Sugeno-based fuzzy approach to identify the unknown dynamics of TLP.
- Derivation of new LMI-based conditions to ensure system stability.
- A design that considers, in addition to perturbations such as turbulence and sea waves, the effect of estimation errors.
- Optimization of all parameters using the square-root cubature Kalman filter (SCKF).
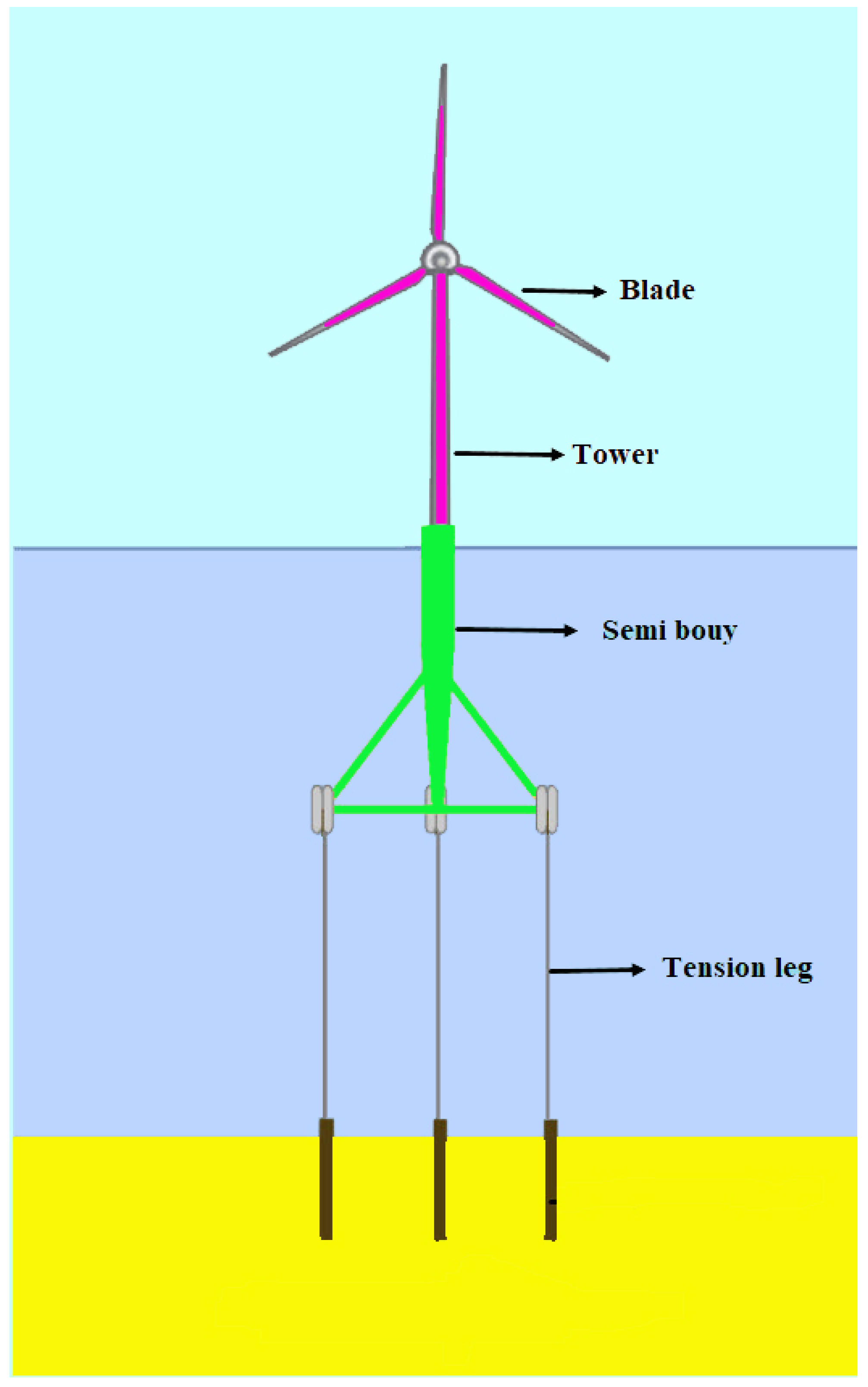
2. Modeling and Formulation of the TLP Systems
3. Type 2 Fuzzy Takagi-Sugeno
4. Learning Using a Square-Root Cubature Kalman Filter (SCKF)
- a.
- The square root of the error covariance was considered as at k.
- b.
- Cubature points were calculated as follows (i = 1, 2, 3, …, m):where , and N are the number of free parameters and denotes the parameters predicted by the second-order fuzzy system.
- c.
- Compute the propagated cubature points:
- d.
- Estimate:
- e.
- The square root of the innovation covariance matrix was calculated as , where represents the square root factor of , so that . The weighted centered matrix could be expressed as follows:
- f.
- Compute the cross-variance matrix:
- g.
- Estimate the Kalman gain:
- h.
- Compute the updated state:
- i.
- Calculated covariance error:
5. Stability Analysis
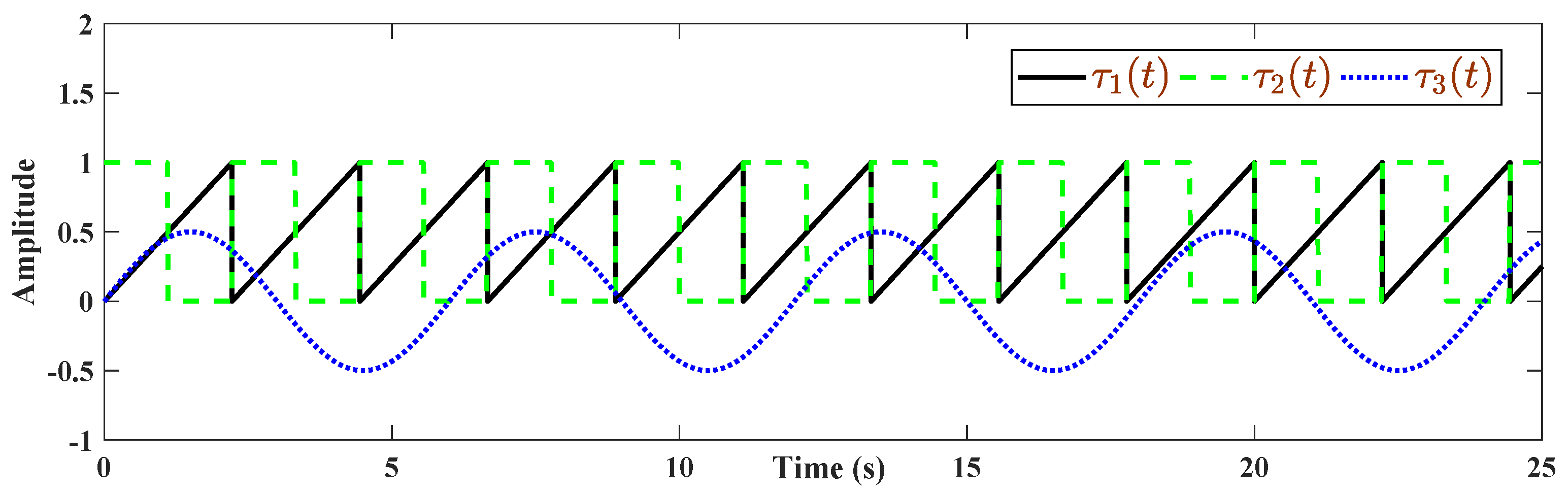
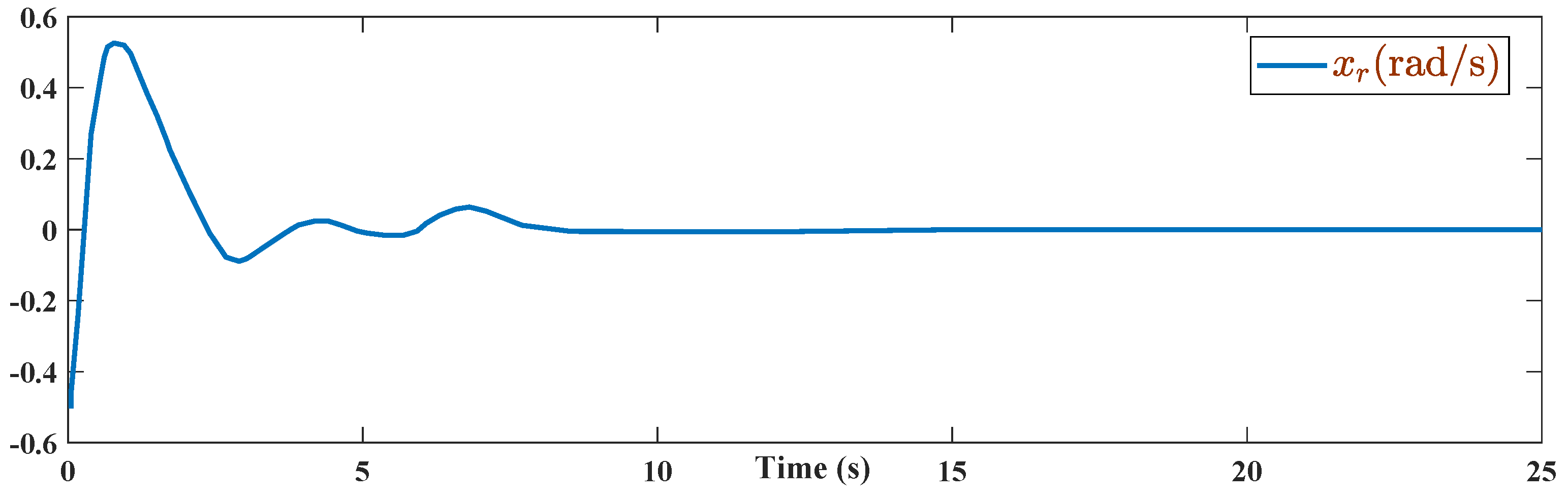
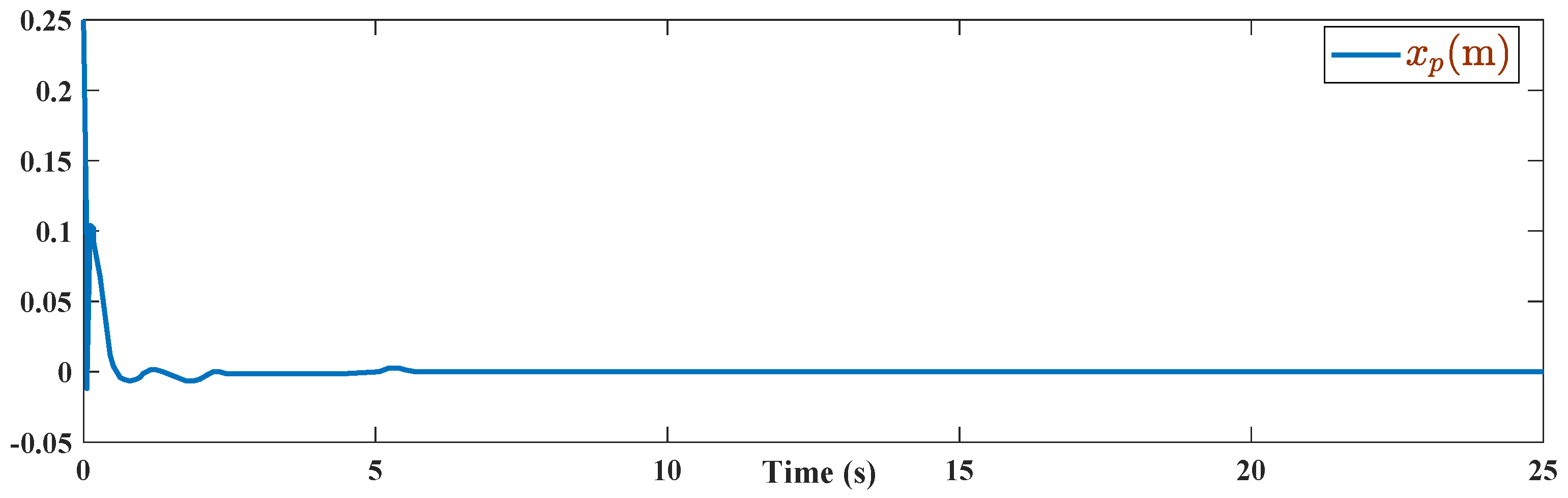
6. Simulation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Global Wind Report. 2021. Available online: https://gwec.net/global-wind-report-2021/ (accessed on 1 February 2022).
- Delgado, I.; Fahim, M. Wind Turbine Data Analysis and LSTM-Based Prediction in SCADA System. Energies 2021, 14, 125. [Google Scholar] [CrossRef]
- Fahim, M.; Fraz, K.; Sillitti, A. TSI: Time series to imaging based model for detecting anomalous energy consumption in smart buildings. Inf. Sci. 2020, 523, 1–13. [Google Scholar] [CrossRef]
- Corley, B.; Koukoura, S.; Carroll, J.; McDonald, A. Combination of thermal modelling and machine learning approaches for fault detection in wind turbine gearboxes. Energies 2021, 14, 1375. [Google Scholar] [CrossRef]
- Corley, B.; Carroll, J.; McDonald, A. Thermal modelling of a small wind turbine gearbox for condition monitoring. J. Eng. 2019, 2019, 5335–5339. [Google Scholar] [CrossRef]
- Gajewski, P.; Pieńkowski, K. Control of the Hybrid Renewable Energy System with Wind Turbine, Photovoltaic Panels and Battery Energy Storage. Energies 2021, 14, 1595. [Google Scholar] [CrossRef]
- Gajewski, P.; Pieńkowski, K. Advanced control of direct-driven PMSG generator in wind turbine system. Arch. Electr. Eng. 2016, 65, 643–656. [Google Scholar] [CrossRef]
- Chen, C.Y.; Lin, J.W.; Lee, W.I.; Chen, C.W. Fuzzy control for an oceanic structure: A case study in time-delay TLP system. J. Vib. Control. 2010, 16, 147–160. [Google Scholar] [CrossRef]
- Chen, C.W. Modeling, control, and stability analysis for time-delay TLP systems using the fuzzy Lyapunov method. Neural Comput. Appl. 2011, 20, 527–534. [Google Scholar] [CrossRef]
- Kiamini, S.; Jalilvand, A.; Mobayen, S. LMI-based robust control of floating tension-leg platforms with uncertainties and time-delays in offshore wind turbines via TS fuzzy approach. Ocean Eng. 2018, 154, 367–374. [Google Scholar] [CrossRef]
- Derugo, P.; Szabat, K.; Pajchrowski, T.; Zawirski, K. Fuzzy Adaptive Type II Controller for Two-Mass System. Energies 2022, 15, 419. [Google Scholar] [CrossRef]
- Pekaslan, D.; Wagner, C.; Garibaldi, J.M. ADONiS-Adaptive Online Nonsingleton Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2019, 28, 2302–2312. [Google Scholar] [CrossRef]
- Tang, Y.; Pedrycz, W. Oscillation-bound estimation of perturbations under Bandler-Kohout subproduct. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef] [PubMed]
- Mohammadzadeh, A.; Ghaemi, S. A modified sliding mode approach for synchronization of fractional-order chaotic/hyperchaotic systems by using new self-structuring hierarchical type-2 fuzzy neural network. Neurocomputing 2016, 191, 200–213. [Google Scholar] [CrossRef]
- Yorgancıoğlu, F.; Kömürcügil, H. Single-input fuzzy-like moving sliding surface approach to the sliding mode control. Electr. Eng. 2008, 90, 199–207. [Google Scholar] [CrossRef]
- Li, Y.; Lin, J.; Niu, G.; Wu, M.; Wei, X. A Hilbert–Huang Transform-Based Adaptive Fault Detection and Classification Method for Microgrids. Energies 2021, 14, 5040. [Google Scholar] [CrossRef]
- Michalski, M.A.; Melani, A.H.; da Silva, R.F.; de Souza, G.F.; Hamaji, F.H. Fault Detection and Diagnosis Based on Unsupervised Machine Learning Methods: A Kaplan Turbine Case Study. Energies 2022, 15, 80. [Google Scholar] [CrossRef]
- Chen, C.S.; Hu, N.T. Model Reference Adaptive Control and Fuzzy Neural Network Synchronous Motion Compensator for Gantry Robots. Energies 2022, 15, 123. [Google Scholar] [CrossRef]
- Albu, A.; Precup, R.E.; Teban, T.A. Results and challenges of artificial neural networks used for decision-making and control in medical applications. Facta Univ. Ser. Mech. Eng. 2019, 17, 285–308. [Google Scholar] [CrossRef]
- Mai, D.S.; Dang, T.H.; Ngo, L.T. Optimization of interval type-2 fuzzy system using the PSO technique for predictive problems. J. Inf. Telecommun. 2021, 5, 197–213. [Google Scholar] [CrossRef]
- Badri Narayanan, K.; Sreekumar, M. Diagnosing of Risk State in Subsystems of CNC Turning Center using Interval Type-2 Fuzzy Logic System with Semi Elliptic Membership Functions. Int. J. Fuzzy Syst. 2021, 53, 1–18. [Google Scholar] [CrossRef]
- Takahashi, A.; Takahashi, S. A new interval type-2 fuzzy logic system under dynamic environment: Application to financial investment. Eng. Appl. Artif. Intell. 2021, 100, 104154. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Sabzalian, M.H.; Ahmadian, A.; Nabipour, N. A dynamic general type-2 fuzzy system with optimized secondary membership for online frequency regulation. ISA Trans. 2021, 112, 150–160. [Google Scholar] [CrossRef] [PubMed]
- Martínez, G.E.; Gonzalez, C.I.; Mendoza, O.; Melin, P. General type-2 fuzzy sugeno integral for edge detection. J. Imaging 2019, 5, 71. [Google Scholar] [CrossRef] [Green Version]
- Ontiveros-Robles, E.; Melin, P. Toward a development of general type-2 fuzzy classifiers applied in diagnosis problems through embedded type-1 fuzzy classifiers. Soft Comput. 2020, 24, 83–99. [Google Scholar] [CrossRef]
- Cao, Y.; Raise, A.; Mohammadzadeh, A.; Rathinasamy, S.; Band, S.S.; Mosavi, A. Deep learned recurrent type-3 fuzzy system: Application for renewable energy modeling/prediction. Energy Rep. 2021, 7, 8115–8127. [Google Scholar] [CrossRef]
- Shukla, A.K.; Muhuri, P.K. General type-2 fuzzy decision making and its application to travel time selection. J. Intell. Fuzzy Syst. 2019, 36, 5227–5244. [Google Scholar] [CrossRef]
- Nabipour, N.; Qasem, S.N.; Jermsittiparsert, K. Type-3 fuzzy voltage management in PV/hydrogen fuel cell/battery hybrid systems. Int. J. Hydrogen Energy 2020, 45, 32478–32492. [Google Scholar] [CrossRef]
- Liu, Z.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. A New Online Learned Interval Type-3 Fuzzy Control System for Solar Energy Management Systems. IEEE Access 2021, 9, 10498–10508. [Google Scholar] [CrossRef]
- Ma, C.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. Optimal Type-3 Fuzzy System for Solving Singular Multi-Pantograph Equations. IEEE Access 2020, 8, 225692–225702. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mohammadzadeh, A.; Mobayen, S.; Aly, A.A.; Felemban, B.F. A New Data-Driven Control System for MEMSs Gyroscopes: Dynamics Estimation by Type-3 Fuzzy Systems. Micromachines 2021, 12, 1390. [Google Scholar] [CrossRef]
- Wang, J.h.; Tavoosi, J.; Mohammadzadeh, A.; Mobayen, S.; Asad, J.H.; Assawinchaichote, W.; Skruch, P. Non-Singleton Type-3 Fuzzy Approach for Flowmeter Fault Detection: Experimental Study in a Gas Industry. Sensors 2021, 21, 7419. [Google Scholar] [CrossRef] [PubMed]
- Tian, M.W.; Yan, S.R.; Mohammadzadeh, A.; Tavoosi, J.; Mobayen, S.; Safdar, R.; Assawinchaichote, W.; Zhilenkov, A. Stability of Interval Type-3 Fuzzy Controllers for Autonomous Vehicles. Mathematics 2021, 9, 2742. [Google Scholar] [CrossRef]
- Chen, C.W. Stability conditions of fuzzy systems and its application to structural and mechanical systems. Adv. Eng. Softw. 2006, 37, 624–629. [Google Scholar] [CrossRef]
- Tsai, P.W.; Alsaedi, A.; Hayat, T.; Chen, C.W. A novel control algorithm for interaction between surface waves and a permeable floating structure. China Ocean Eng. 2016, 30, 161–176. [Google Scholar] [CrossRef]
- Karimirad, M. Stochastic Dynamic Response Analysis of Spar-Type wind Turbines with Catenary or Taut Mooring Systems. 2011. Available online: http://hdl.handle.net/11250/237877 (accessed on 1 February 2022).
- Nazir, R. Taylor series expansion based repetitive controllers for power converters, subject to fractional delays. Control Eng. Pract. 2017, 64, 140–147. [Google Scholar] [CrossRef]
- Song, R.; Zhu, Q. Stability of linear stochastic delay differential equations with infinite Markovian switchings. Int. J. Robust Nonlinear Control 2018, 28, 825–837. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Sadati, N.; Zamani, I. H∞ disturbance attenuation of fuzzy large-scale systems. In Proceedings of the 2011 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE 2011), Taipei, Taiwan, 27–30 June 2011; pp. 2364–2368. [Google Scholar]
- Linda, O.; Manic, M. Uncertainty-robust design of interval type-2 fuzzy logic controller for delta parallel robot. IEEE Trans. Ind. Inform. 2011, 7, 661–670. [Google Scholar] [CrossRef]
- Zhang, M.; Li, X.; Tong, J.; Xu, J. Load control of floating wind turbine on a Tension-Leg-Platform subject to extreme wind condition. Renew. Energy 2020, 151, 993–1007. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| M | System mass (mast + turbine) |
| Mass added to the system by wave effect for infinite frequencies | |
| The forgetting function is related to the effects of hydrodynamic memory | |
| C | System energy saving coefficient |
| D | Linear adjustment coefficient of the system |
| Spatial displacement | |
| Time-dependent wave excitation forces | |
| Time-dependent aerodynamic force | |
| Average rotor rotation speed | |
| Deviation from the average wave location | |
| Wave speed | |
| Effects of system memory | |
| Disorder entered on the system |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Firouzi, B.; Alattas, K.A.; Bakouri, M.; Alanazi, A.K.; Mohammadzadeh, A.; Mobayen, S.; Fekih, A. A Type-2 Fuzzy Controller for Floating Tension-Leg Platforms in Wind Turbines. Energies 2022, 15, 1705. https://doi.org/10.3390/en15051705
Firouzi B, Alattas KA, Bakouri M, Alanazi AK, Mohammadzadeh A, Mobayen S, Fekih A. A Type-2 Fuzzy Controller for Floating Tension-Leg Platforms in Wind Turbines. Energies. 2022; 15(5):1705. https://doi.org/10.3390/en15051705
Chicago/Turabian StyleFirouzi, Behnam, Khalid A. Alattas, Mohsen Bakouri, Abdullah K. Alanazi, Ardashir Mohammadzadeh, Saleh Mobayen, and Afef Fekih. 2022. "A Type-2 Fuzzy Controller for Floating Tension-Leg Platforms in Wind Turbines" Energies 15, no. 5: 1705. https://doi.org/10.3390/en15051705
APA StyleFirouzi, B., Alattas, K. A., Bakouri, M., Alanazi, A. K., Mohammadzadeh, A., Mobayen, S., & Fekih, A. (2022). A Type-2 Fuzzy Controller for Floating Tension-Leg Platforms in Wind Turbines. Energies, 15(5), 1705. https://doi.org/10.3390/en15051705