
How Much Energy Do We Need to Fly with Greater Agility? Energy Consumption and Performance of an Attitude Stabilization Controller in a Quadcopter Drone: A Modified MPC vs. PID



Abstract
:1. Introduction
Related Work
2. Materials and Methods
2.1. The Elka1Q Drone
2.2. On-Board Sensors’ Issues
2.3. The Attitude Controller
2.4. A Novel Improvement for the Generalized Predictive Controller (GPC)
- It relies on a linear model of a plant;
- It works in a closed-loop (feedback);
- It computes an optimal control signal for the whole control horizon (fixed number of discrete time steps), but only the very first control signal value is applied, and the others are discarded; in the next iteration of the control loop, the optimal control values are computed again (against the latest measurements);
- The GPC is robust: even if the linear model does not match the real plant well, it can still control the system efficiently.
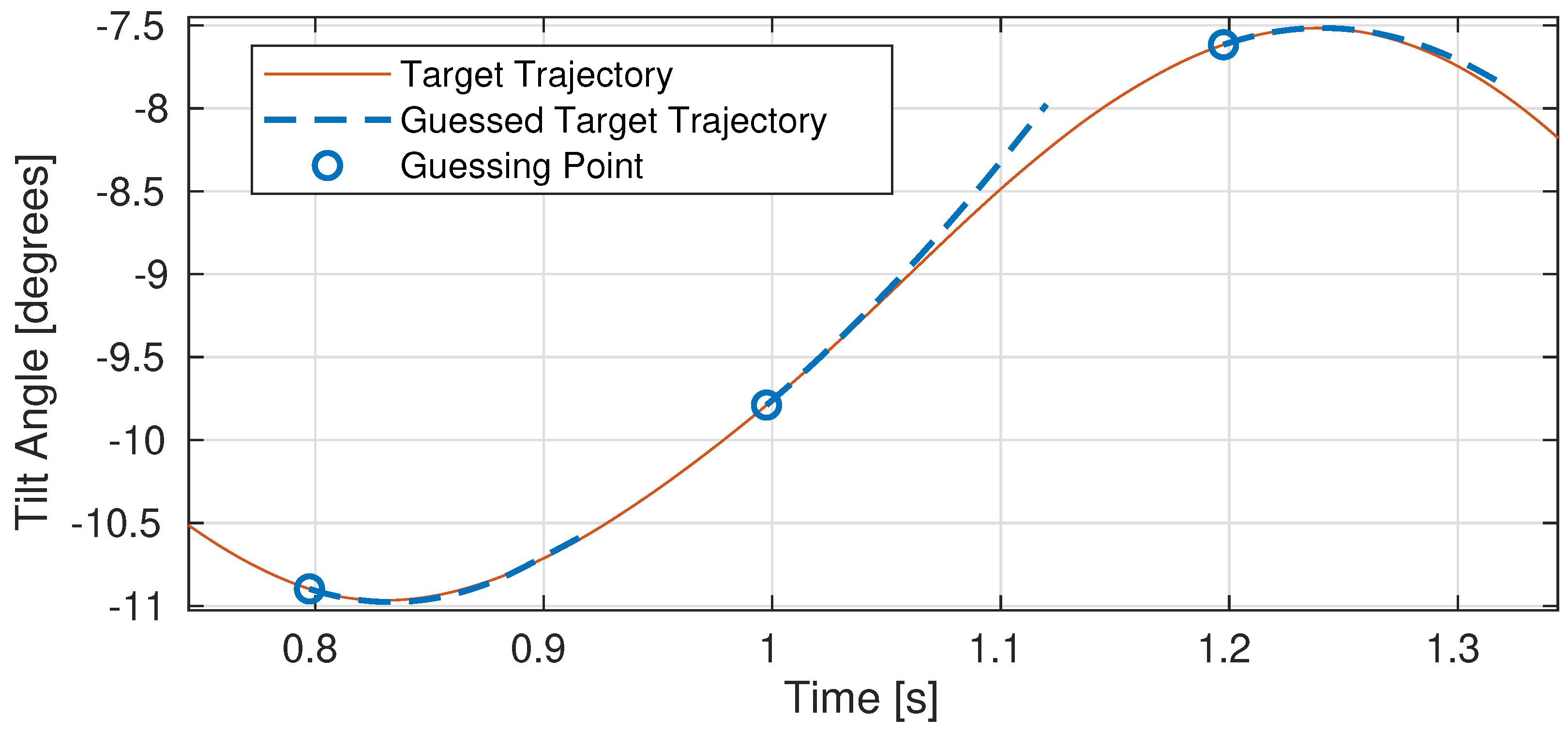
2.5. The Trajectory Guessing Algorithm
2.6. Assessment Methods
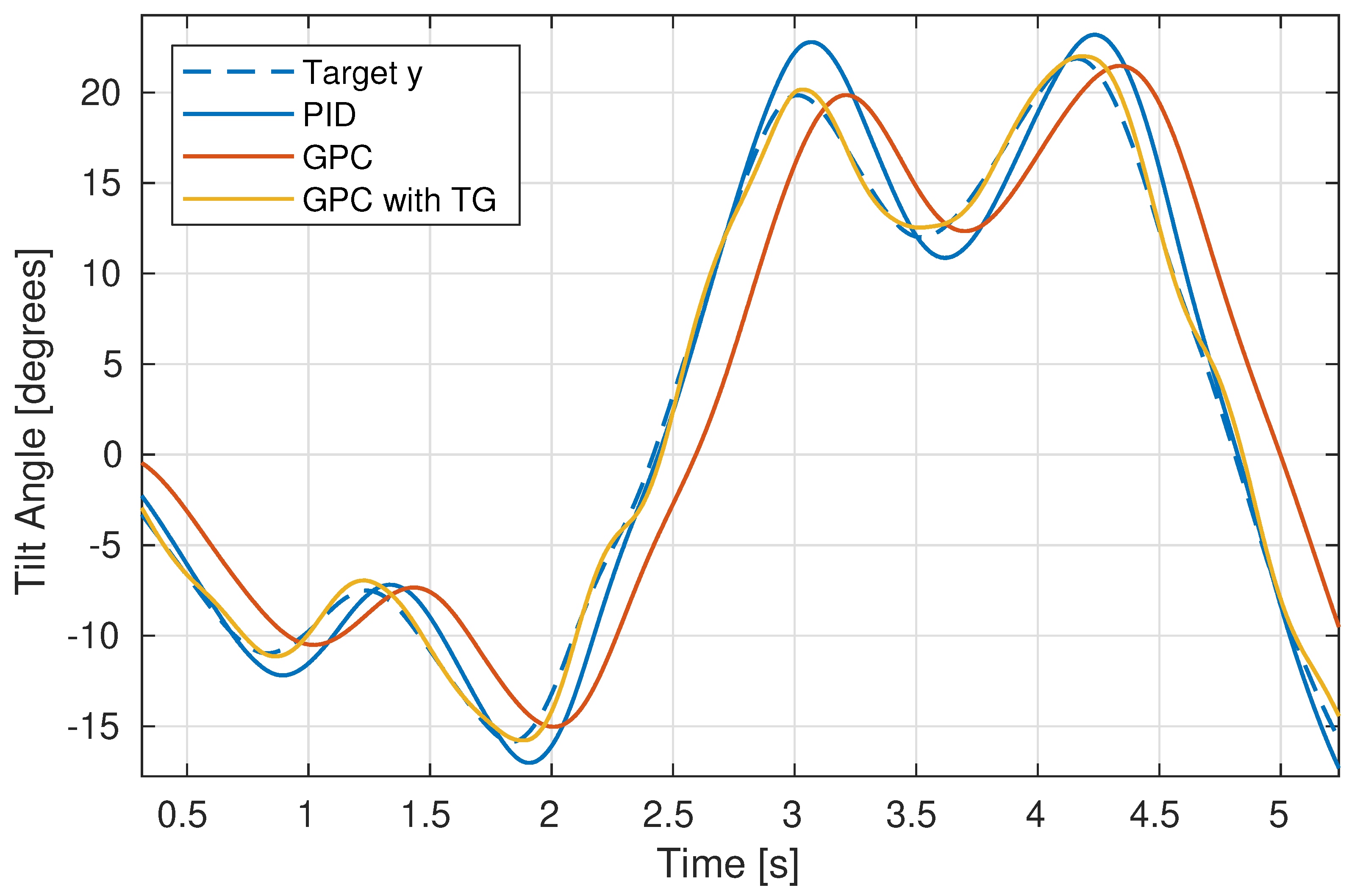
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| SAR | Search-and-Rescue |
| PID | Proportional-Integral-Derivative |
| PD | Proportional-Derivative |
| IMU | Inertial Measurement Unit |
| MPC | Model Predictive Controller |
| GPC | Generalized Predictive Controller |
Appendix A
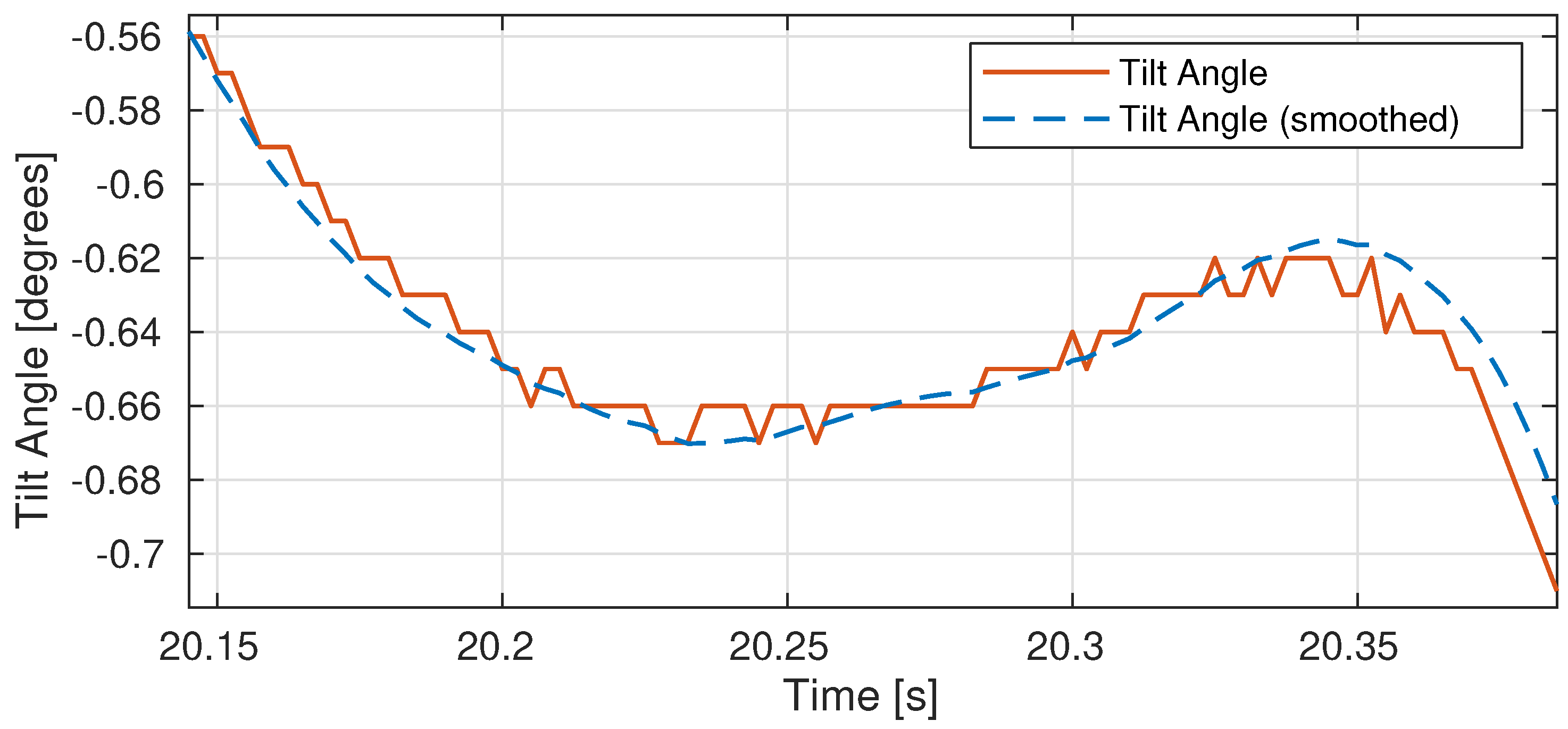
Appendix A.1. The Trajectory Smoothing Algorithm
Appendix A.2. The Neural-Network-Based Linear Model
References
- Máthé, K.; Buşoniu, L. Vision and control for UAVs: A survey of general methods and of inexpensive platforms for infrastructure inspection. Sensors 2015, 15, 14887–14916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Waharte, S.; Trigoni, N. Supporting search and rescue operations with UAVs. In Proceedings of the 2010 International Conference on Emerging Security Technologies, Canterbury, UK, 6–7 September 2010; pp. 142–147. [Google Scholar]
- Aljehani, M.; Inoue, M. Performance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL Simulator. IEEE Access 2019, 7, 64386–64400. [Google Scholar] [CrossRef]
- Heutger, M.; Kückelhaus, M. Unmanned Aerial Vehicles in Logistics a DHL Perspective on Implications and Use Cases for the Logistics Industry; DHL Customer Solutions & Innovation: Troisdorf, Germany, 2014. [Google Scholar]
- Razi, P.; Sumantyo, J.T.S.; Perissin, D.; Kuze, H.; Chua, M.Y.; Panggabean, G.F. 3D Land Mapping and Land Deformation Monitoring Using Persistent Scatterer Interferometry (PSI) ALOS PALSAR: Validated by Geodetic GPS and UAV. IEEE Access 2018, 6, 12395–12404. [Google Scholar] [CrossRef]
- Scott, J.E.; Scott, C.H. Drone Delivery Models for Medical Emergencies. In Delivering Superior Health and Wellness Management with IoT and Analytics; Springer: Cham, Switzerland, 2020; pp. 69–85. [Google Scholar]
- Alicandro, M.; Dominici, D.; Massimini, V. Surveys with UAV photogrammetry: Case studies in l’Aquila during the post-earthquake scenario. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 12–17 April 2015; p. 14987. [Google Scholar]
- Perez-Grau, F.; Ragel, R.; Caballero, F.; Viguria, A.; Ollero, A. Semi-autonomous teleoperation of UAVs in search and rescue scenarios. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1066–1074. [Google Scholar] [CrossRef]
- Euchi, J. Do drones have a realistic place in a pandemic fight for delivering medical supplies in healthcare systems problems? Chin. J. Aeronaut. 2021, 34, 182–190. [Google Scholar] [CrossRef]
- Maheswari, R.; Ganesan, R.; Venusamy, K. MeDrone- A Smart Drone to Distribute Drugs to Avoid Human Intervention and Social Distancing to Defeat COVID-19 Pandemic for Indian Hospital. J. Phys. Conf. Ser. 2021, 1964, 062112. [Google Scholar] [CrossRef]
- Camacho, E.F.; Bordons, C. Model Predictive Control; Springer: London, UK, 1999. [Google Scholar]
- Tatjewski, P. Advanced Control of Industrial Processes: Structures and Algorithms; Springer Science & Business Media: London, UK, 2007. [Google Scholar]
- Åström, K.J.; Murray, R.M. Feedback Systems; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Okulski, M.; Ławryńczuk, M. A Novel Neural Network Model Applied to Modeling of a Tandem-Wing Quadplane Drone. IEEE Access 2021, 9, 14159–14178. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; Volume 1. [Google Scholar]
- Yang, H.; Lee, Y.; Jeon, S.Y.; Lee, D. Multi-rotor drone tutorial: Systems, mechanics, control and state estimation. Intell. Serv. Robot. 2017, 10, 79–93. [Google Scholar] [CrossRef]
- Mahony, R.; Kumar, V.; Corke, P. Multirotor aerial vehicles: Modeling, estimation, and control of quadrotor. IEEE Robot. Autom. Mag. 2012, 19, 20–32. [Google Scholar] [CrossRef]
- Andropov, S.; Guirik, A.; Budko, M.; Budko, M.; Bobtsov, A. Synthesis of Artificial Network Based Flight Controller Using Genetic Algorithms. In Proceedings of the 2018 10th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Moscow, Russia, 5–9 November 2018; pp. 1–5. [Google Scholar]
- Muñoz, F.; González-Hernández, I.; Salazar, S.; Espinoza, E.S.; Lozano, R. Second order sliding mode controllers for altitude control of a quadrotor UAS: Real-time implementation in outdoor environments. Neurocomputing 2017, 233, 61–71. [Google Scholar] [CrossRef]
- Koch, W.; Mancuso, R.; West, R.; Bestavros, A. Reinforcement learning for UAV attitude control. ACM Trans. Cyber-Phys. Syst. 2019, 3, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.; Kim, H.J.; Park, S.; Kim, Y. Model predictive flight control using adaptive support vector regression. Neurocomputing 2010, 73, 1031–1037. [Google Scholar] [CrossRef]
- Misin, M.; Puig, V. LPV MPC Control of an Autonomous Aerial Vehicle. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphael, France, 15–18 September 2020; pp. 109–114. [Google Scholar] [CrossRef]
- Grujic, I.; Nilsson, R. Model-based development and evaluation of control for complex multi-domain systems: Attitude control for a quadrotor uav. Tech. Rep. Electron. Comput. Eng. 2016, 4. [Google Scholar]
- Shauqee, M.N.; Rajendran, P.; Suhadis, N.M. Quadrotor Controller Design Techniques and Applications Review. INCAS Bull. 2021, 13, 179–194. [Google Scholar] [CrossRef]
- Tal, E.; Karaman, S. Accurate Tracking of Aggressive Quadrotor Trajectories Using Incremental Nonlinear Dynamic Inversion and Differential Flatness. IEEE Trans. Control Syst. Technol. 2021, 29, 1203–1218. [Google Scholar] [CrossRef]
- Ryou, G.; Tal, E.; Karaman, S. Multi-fidelity black-box optimization for time-optimal quadrotor maneuvers. arXiv 2020, arXiv:2006.02513. [Google Scholar]
- Okulski, M.; Ławryńczuk, M. Identification of Linear Models of a Tandem-Wing Quadplane Drone: Preliminary Results. In Advanced, Contemporary Control; Springer: Cham, Switzerland, 2020; pp. 219–228. [Google Scholar]
- Okulski, M.; Ławryńczuk, M. Development of a High-Efficiency Pitch/Roll Inertial Measurement Unit Based on a Low-Cost Accelerometer and Gyroscope Sensors. In Proceedings of the 2019 24th International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 26–29 August 2019; pp. 657–662. [Google Scholar]
- Adding a New Flight Mode to Copter. 2021. Available online: https://ardupilot.org/dev/docs/apmcopter-adding-a-new-flight-mode.html (accessed on 11 November 2021).
- Matlab’s Finddelay Function Reference. 2021. Available online: https://www.mathworks.com/help/signal/ref/finddelay.html (accessed on 11 November 2021).
- API Documentation | TensorFlow Core r2.1. 2021. Available online: https://www.tensorflow.org/api_docs/ (accessed on 1 November 2021).
- Keras: The Python Deep Learning Library. 2021. Available online: https://keras.io/ (accessed on 11 November 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Delay | Energy Consumption |
|---|---|---|
| PID | 24 | 3.50 Wh |
| MPC | 74 | 3.35 Wh |
| MPC with Trajectory Guessing | 6 | 4.05 Wh |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Okulski, M.; Ławryńczuk, M. How Much Energy Do We Need to Fly with Greater Agility? Energy Consumption and Performance of an Attitude Stabilization Controller in a Quadcopter Drone: A Modified MPC vs. PID. Energies 2022, 15, 1380. https://doi.org/10.3390/en15041380
Okulski M, Ławryńczuk M. How Much Energy Do We Need to Fly with Greater Agility? Energy Consumption and Performance of an Attitude Stabilization Controller in a Quadcopter Drone: A Modified MPC vs. PID. Energies. 2022; 15(4):1380. https://doi.org/10.3390/en15041380
Chicago/Turabian StyleOkulski, Michał, and Maciej Ławryńczuk. 2022. "How Much Energy Do We Need to Fly with Greater Agility? Energy Consumption and Performance of an Attitude Stabilization Controller in a Quadcopter Drone: A Modified MPC vs. PID" Energies 15, no. 4: 1380. https://doi.org/10.3390/en15041380
APA StyleOkulski, M., & Ławryńczuk, M. (2022). How Much Energy Do We Need to Fly with Greater Agility? Energy Consumption and Performance of an Attitude Stabilization Controller in a Quadcopter Drone: A Modified MPC vs. PID. Energies, 15(4), 1380. https://doi.org/10.3390/en15041380